
Precision Agriculture Workflow, from Data Collection to Data Management Using FOSS Tools: An Application in Northern Italy Vineyard

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
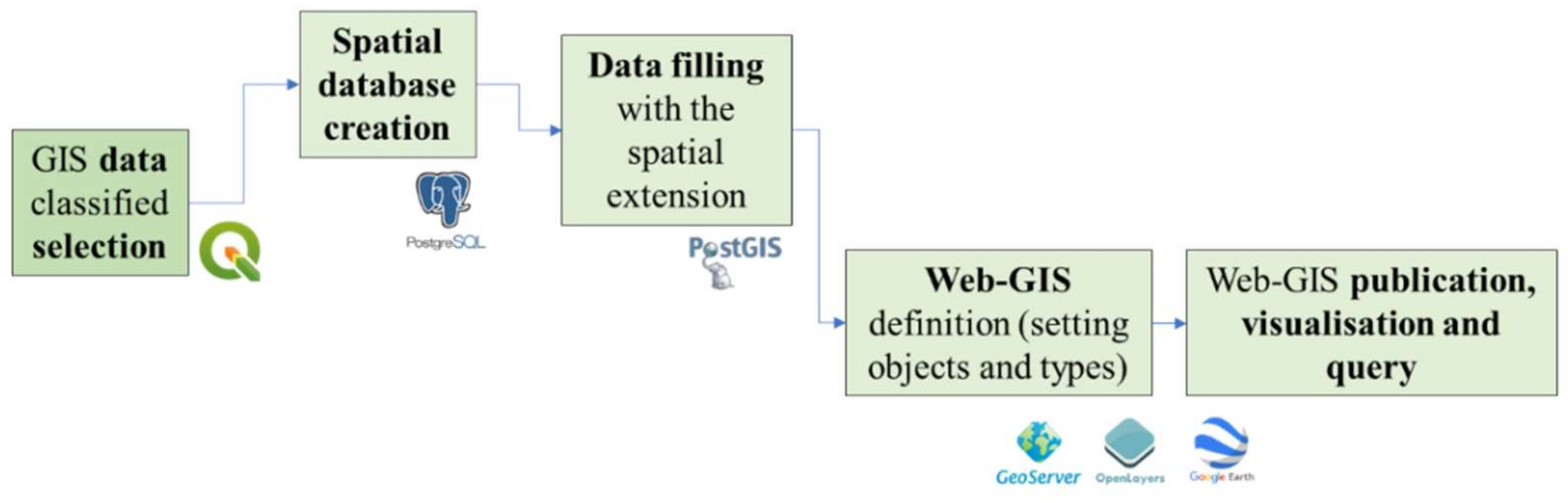
- The Desktop GIS applications, mapping software installed on a PC, allow users to display, query, update, and analyse geographic information such as Quantum GIS [5].
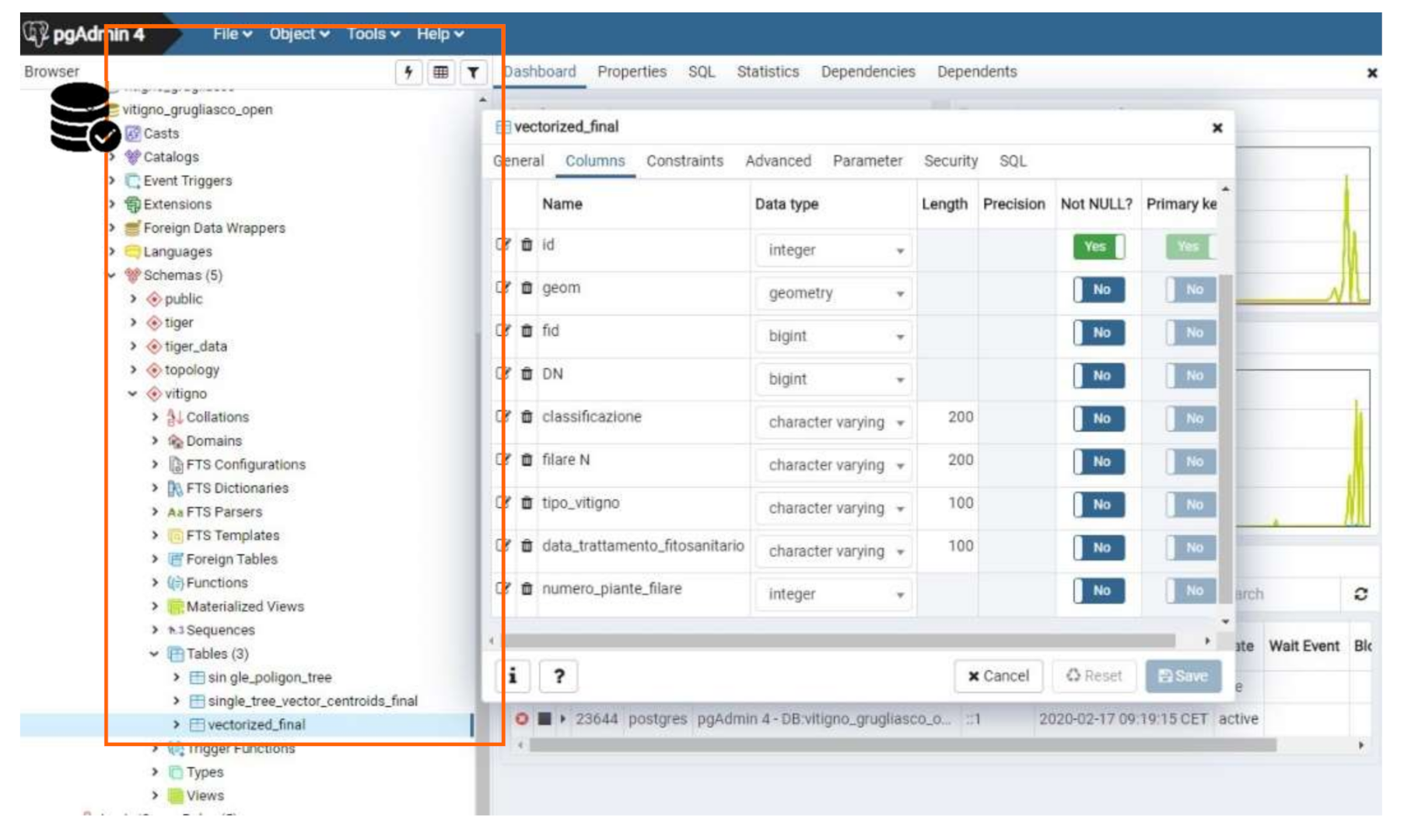
- The Spatial Data Base Management Systems (SDBMS) include systems to manage and store data, such as the open-source object-relational database PostgreSQL [9] with its graphic interface PgAdmin and the spatial extension PostGIS.
- The WebMap Servers are tools to share maps. They support the OGC standards described in paragraph 2.1.
- Data acquisition can be performed using either proximal sensing or remote sensing techniques;
- Information extraction can be achieved by processing and transforming the raw data acquired through sensing techniques and GIS software;
- Crop management can be performed using the information acquired as decision support.
2. Materials and Methods
2.1. Spatial Database and Smart Agriculture Data Sharing
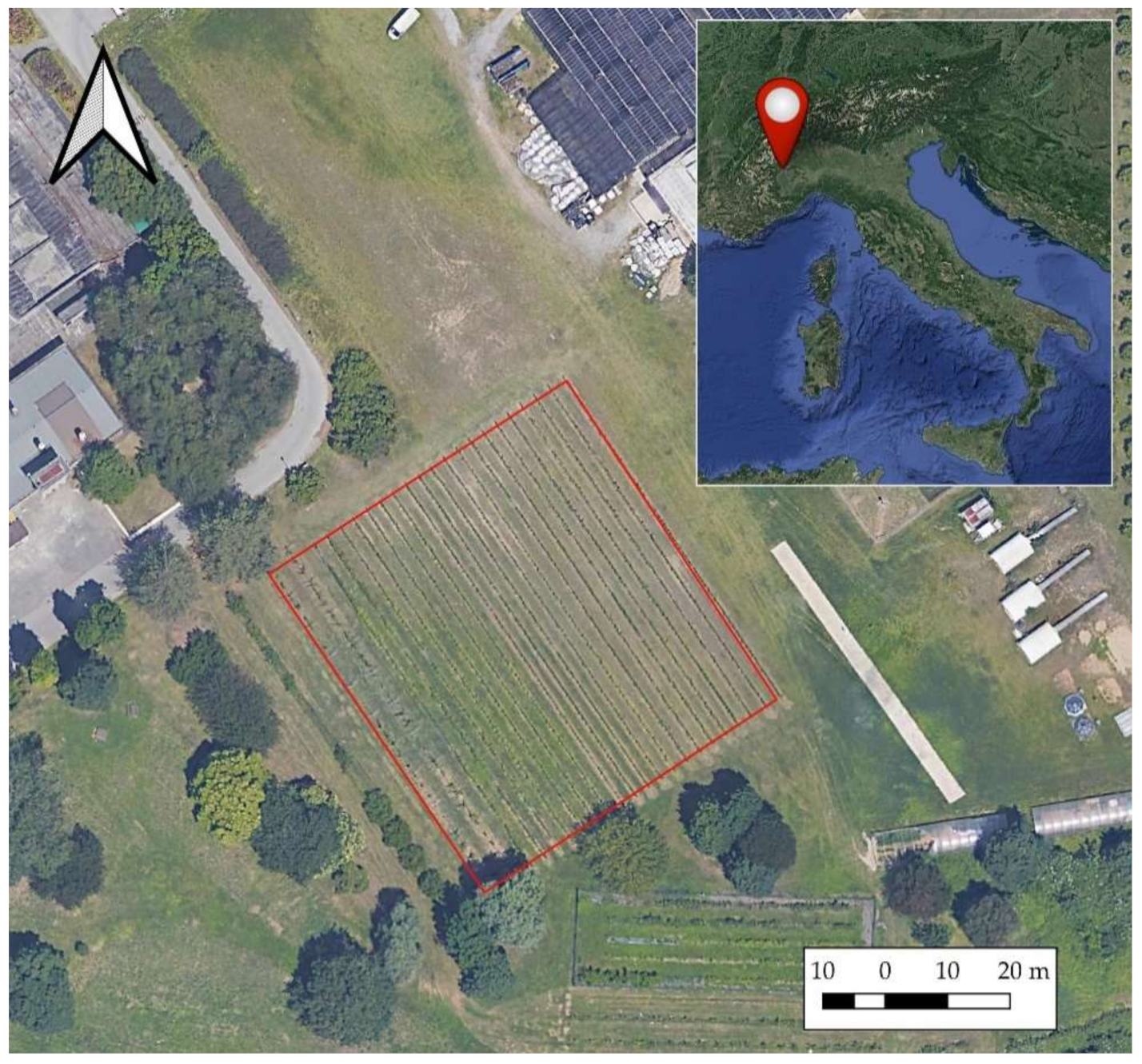
2.2. Study Area
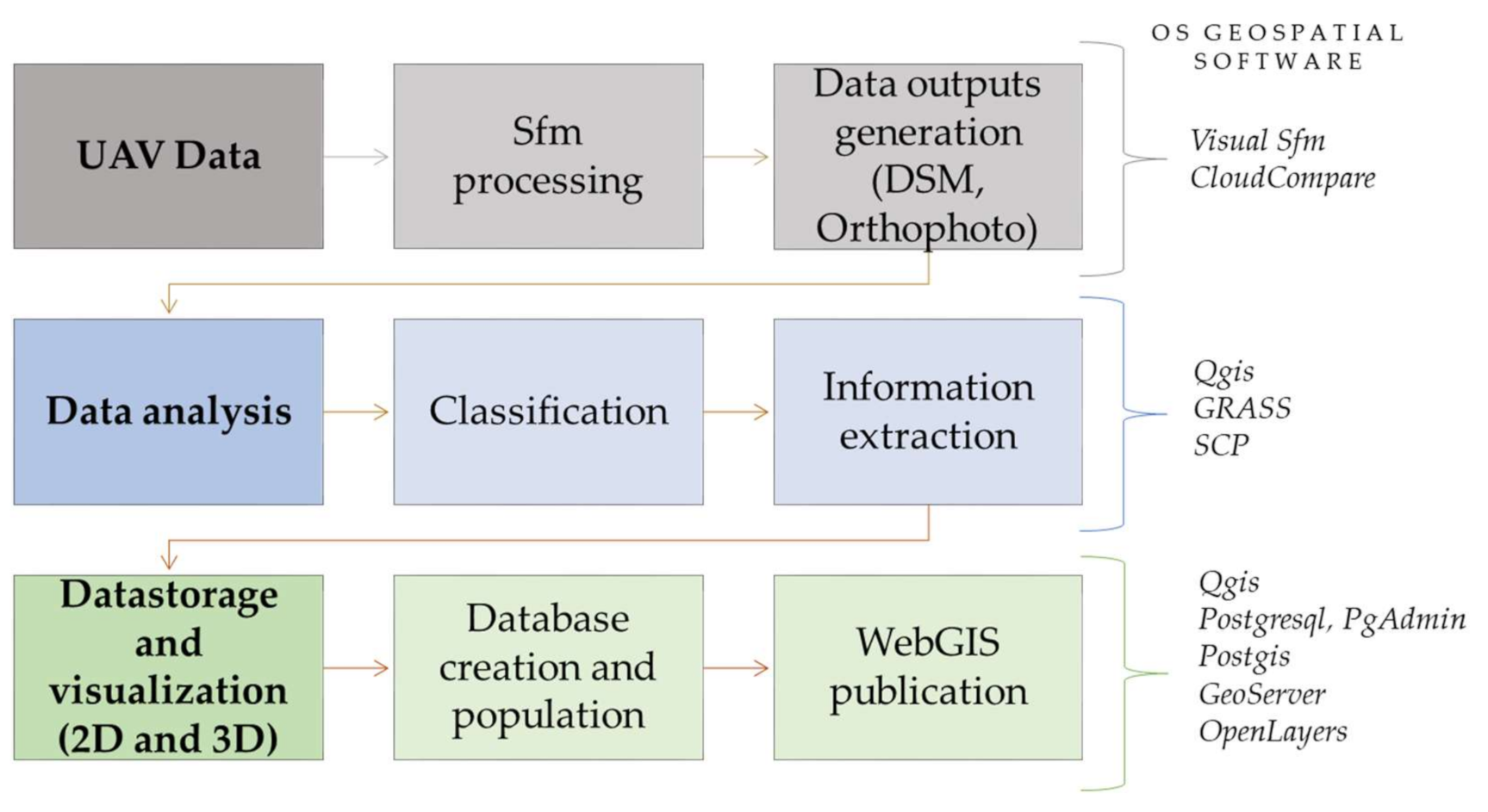
2.3. The Workflow
- drone mapping, data analysis, and information extraction;
- database construction;
- web-sharing.
2.3.1. Data Collection
- a multispectral camera with four optical sensors:
- RGB (Center 470 nm (Blue) 520 nm (Green) 620 nm (Red), Width 110 nm);
- Red (Center 650 nm, Width 40 nm);
- Red Edge (Center 715 nm, Width 30 nm);
- Near IR (Center 850 nm, Width 70 nm);
- a Precision Navigation Module (LiDAR Rangefinder and Integrated Dual Antenna RTK GPS), which allows for obtaining better accuracy and quality of results in areas of uneven terrain [54];
- An Ambient Illumination Sensor (AIS) that allows for gaining sunlight-calibrated spectral images.
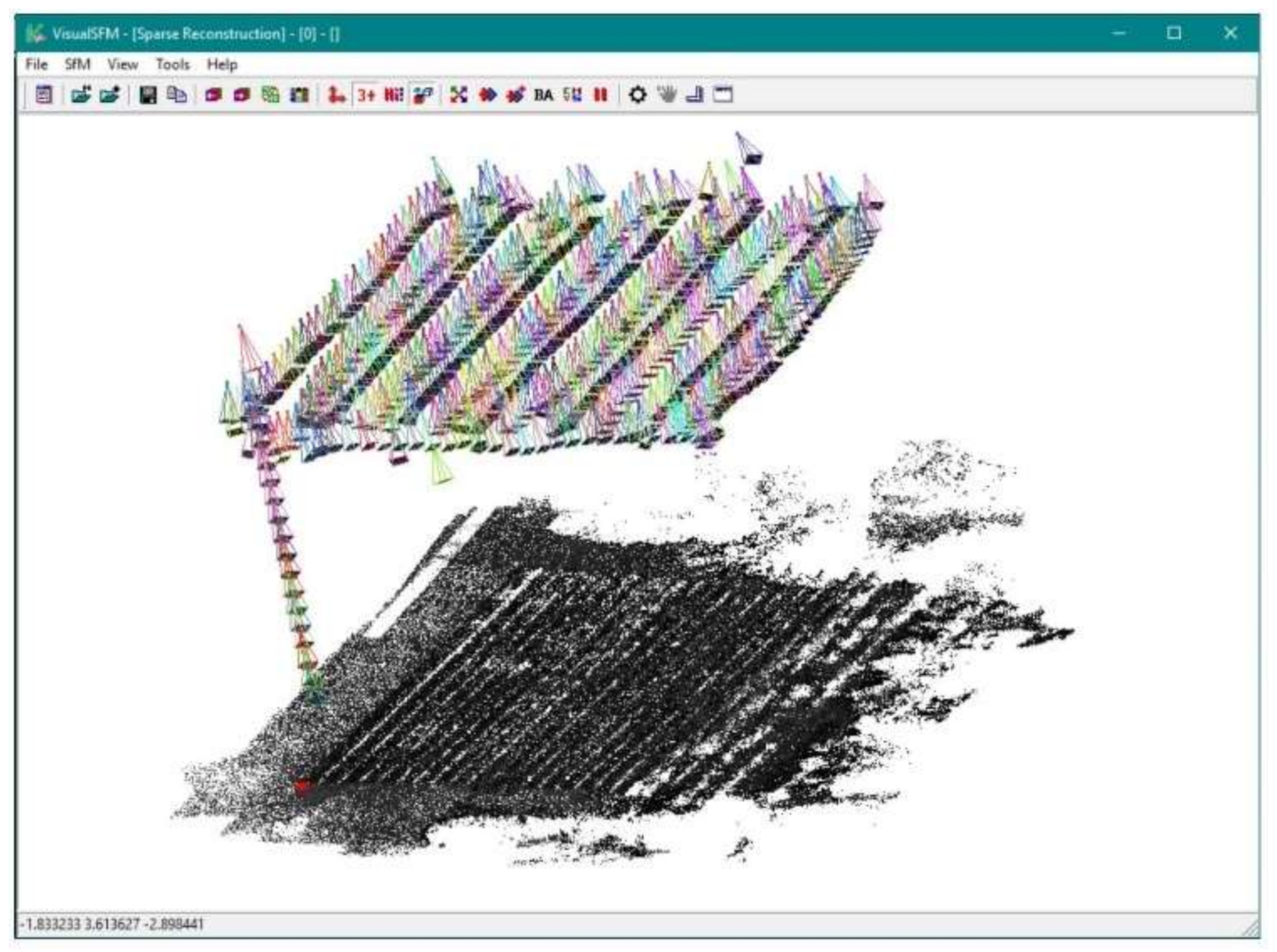
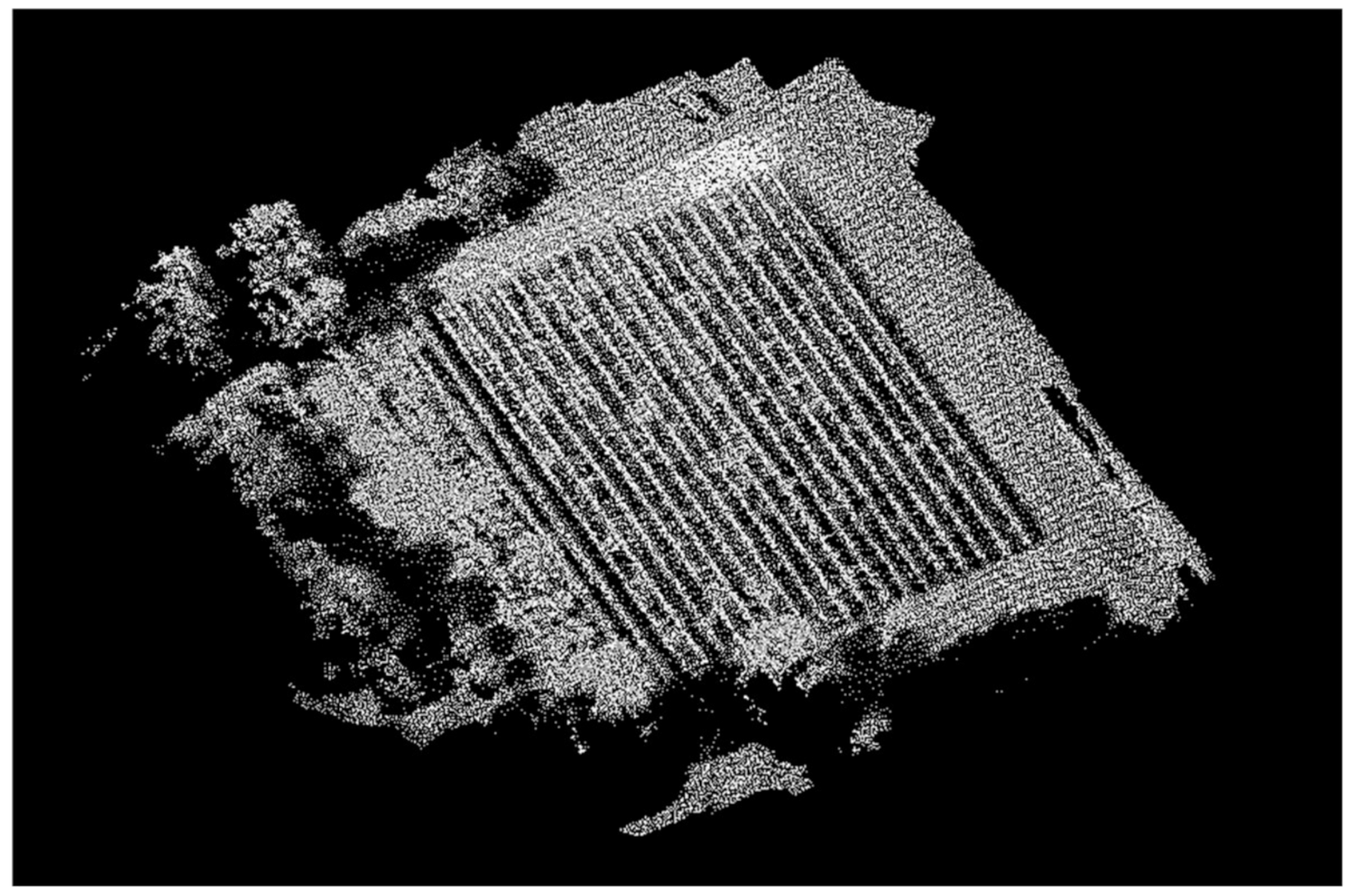
2.3.2. Data Processing
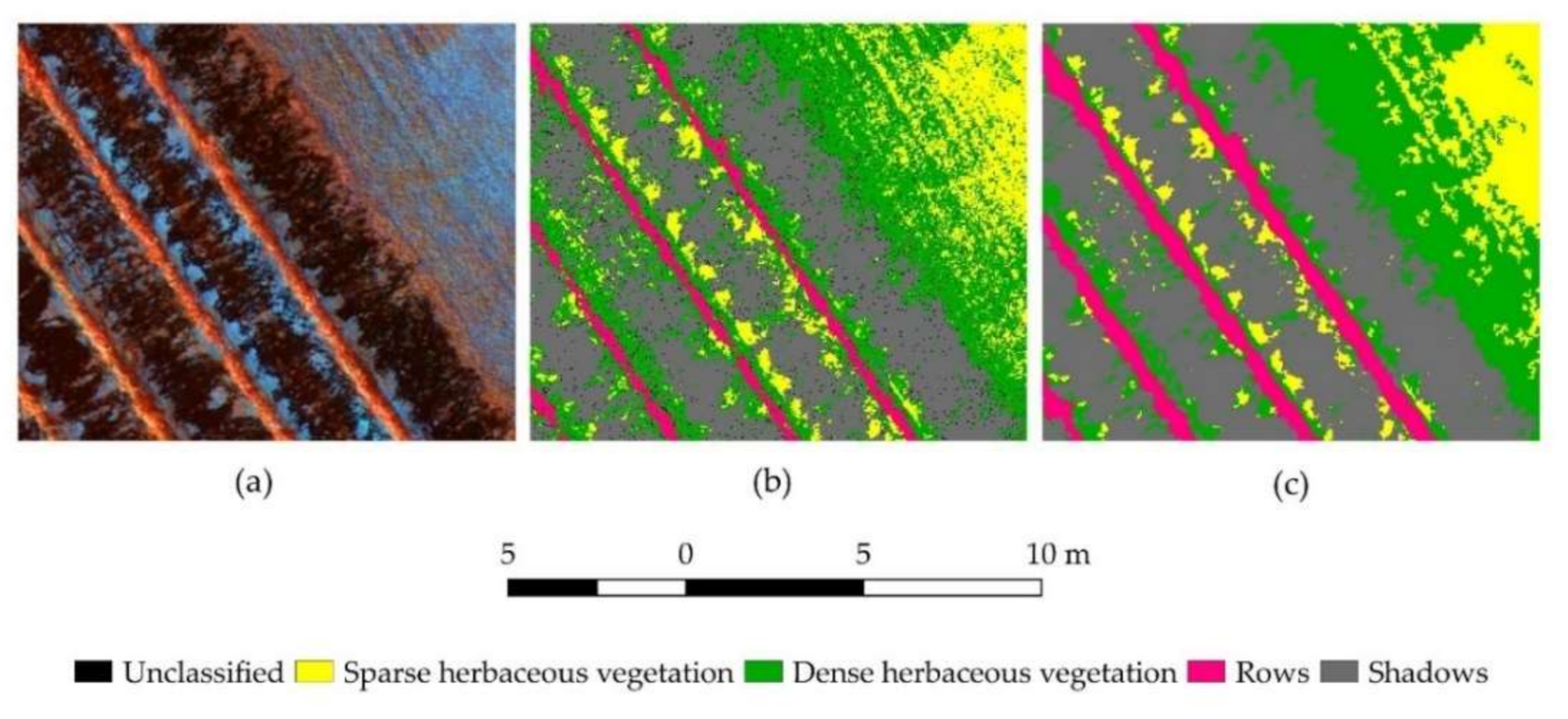
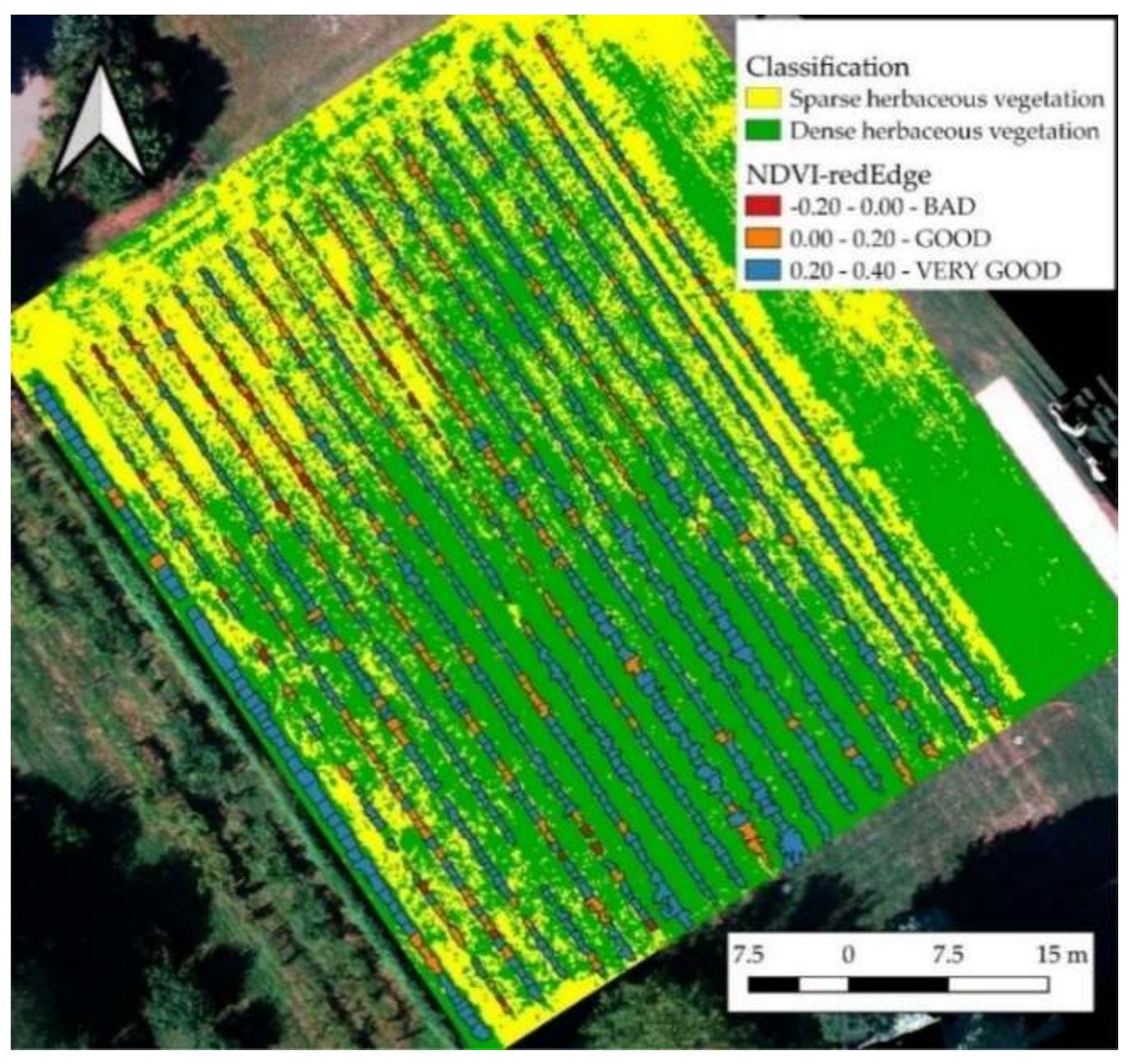
2.3.3. Mapping and Classification
3. Results and Discussion
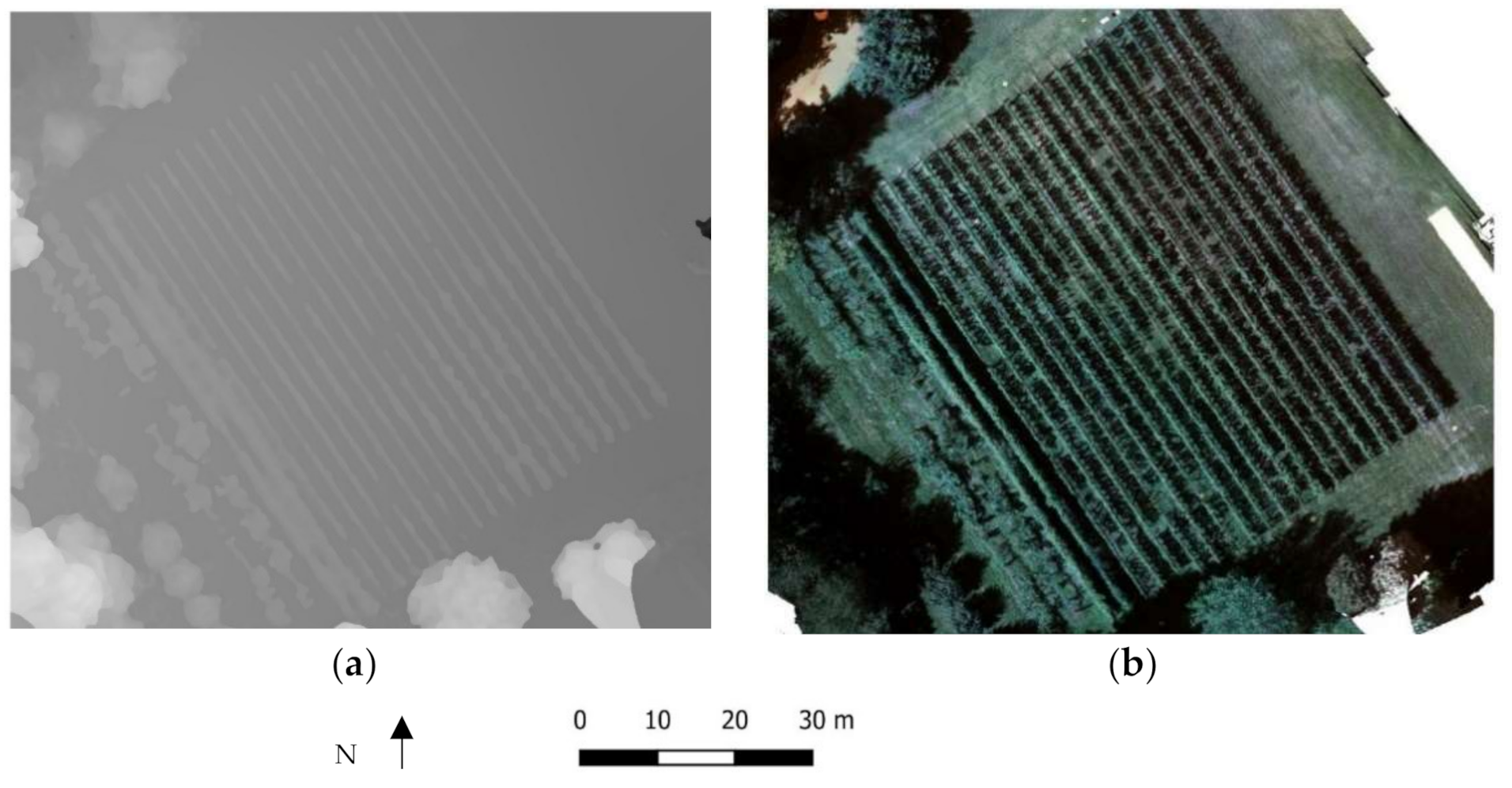
3.1. Orthophoto and DSM
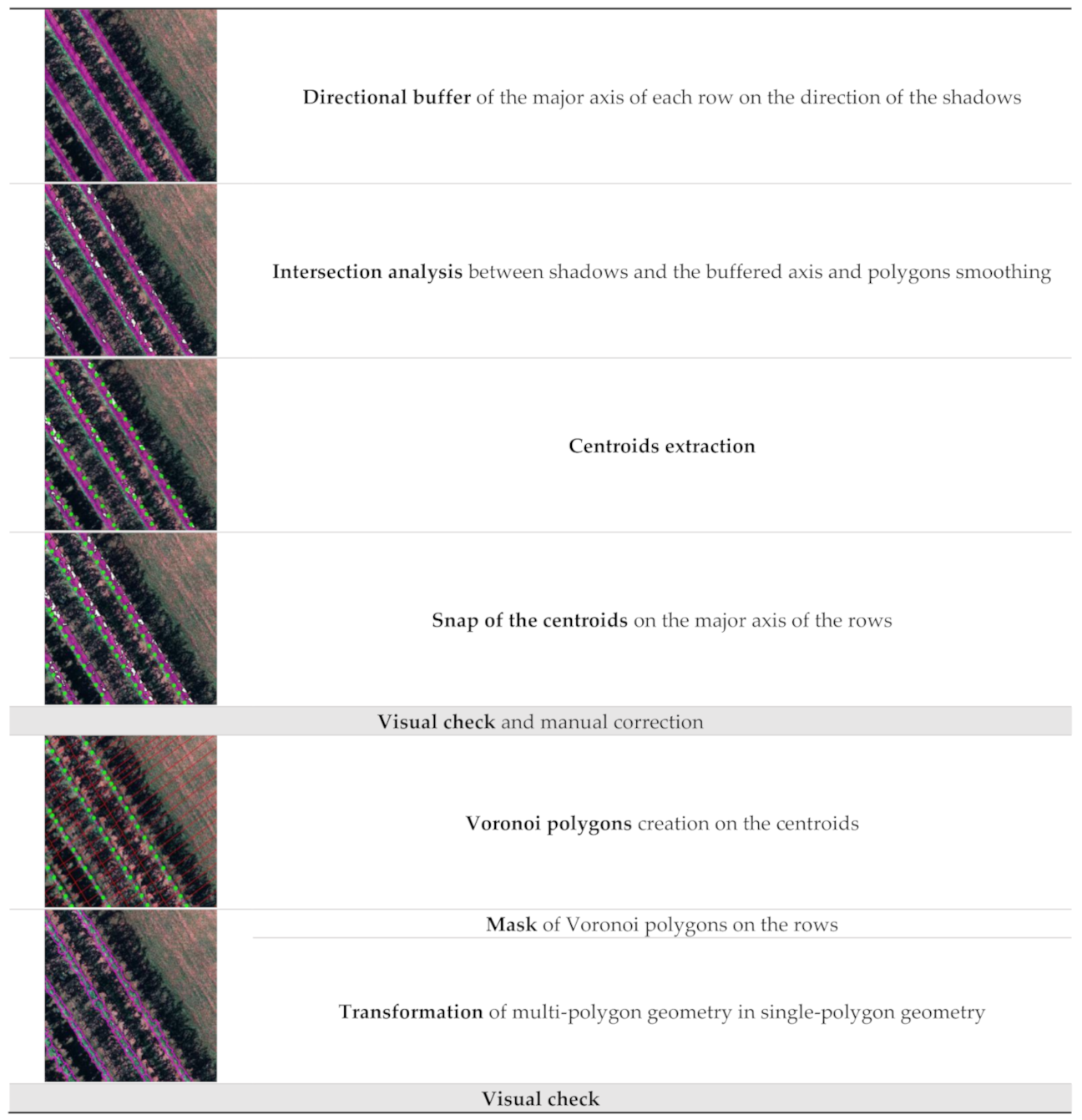
3.2. Classification of the Rows and Single Tree Detection
3.3. Data Storage, Visualisation, and Querying
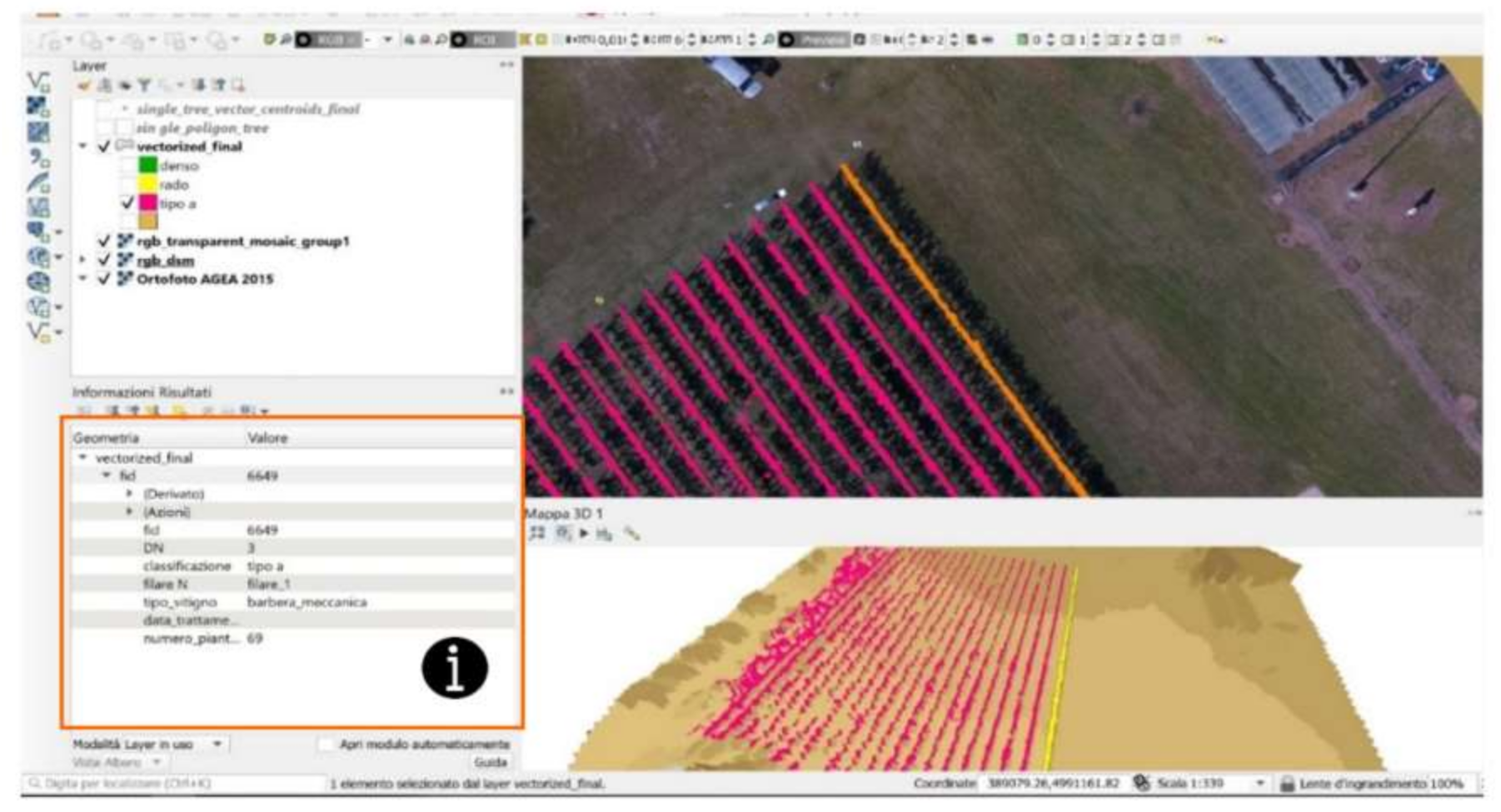
3.3.1. 3D Visualisation of Data in QGIS and Spatial Database Creation
- DSM, raster data from drone acquisition;
- orthomosaic, raster data resulting from the SfM elaboration (Section 3.1) visualised in real colour (RGB);
- vineyard row, polygons obtained from the vectorisation of the class Rows;
- single trees and plants, centroid-points of the single tree;
- state of health, a classified vector composed polygons of single trees. It contains information regarding vegetation health indices.
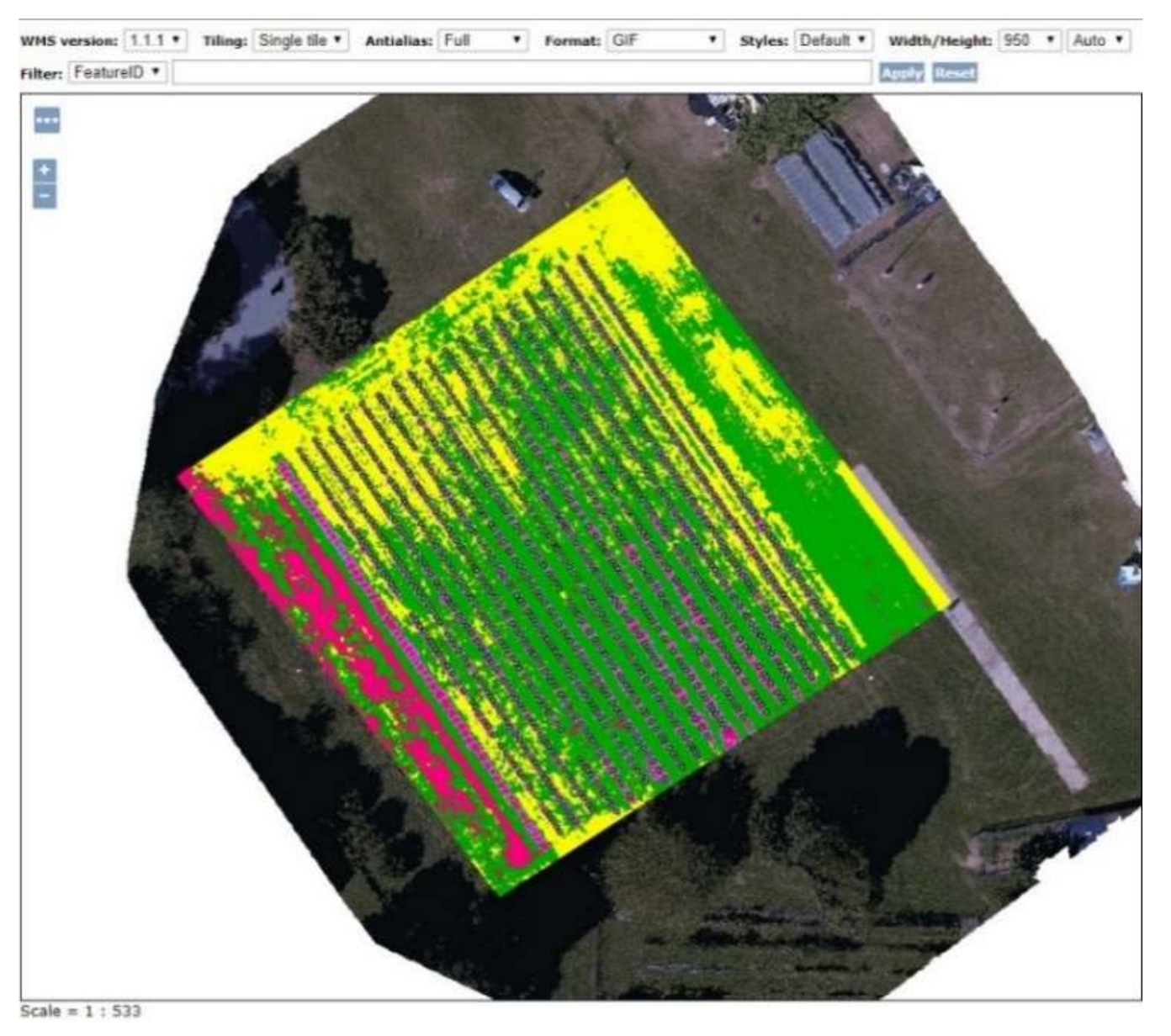
3.3.2. The WebGIS Platform
- Connection of the PostGIS Database in GeoServer with the localhost http://localhost:8080/geoserver/web, accessed on 5 April 2021;
- Workspace creation: Grugliasco vineyard (URI: http://localhost:8080/geoserver/Grugliascovineyard, accessed on 18 December 2020), Figure 13;
- Inserting layers from PostGIS (vectors and raster) with their style of visualisation. slt as defined in the QGIS project;
- Publication of the Grugliasco vineyard WebGIS in GeoServer;
- Visualisation of the 2D Map with OpenLayers (it is a JavaScript library for viewing interactive maps in web browsers) (Figure 14);
- Downloading.kml, JSON or WFS file and 3D viewing in GIS environment or in Google Earth for a fast and for not-GIS specialised users’ immediate visualisation.
4. Conclusions and Future Perspective
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Coetzee, S.; Ivánová, I.; Mitasova, H.; Brovelli, M.A. Open Geospatial Software and Data: A Review of the Current State and A Perspective into the Future. ISPRS Int. J. Geo-Inf. 2020, 9, 90. [Google Scholar] [CrossRef] [Green Version]
- Mobasheri, A.; Mitasova, H.; Neteler, M.; Singleton, A.; Ledoux, H.; Brovelli, M.A. Highlighting recent trends in open source geospatial science and software. Trans. GIS 2020, 24, 1141–1146. [Google Scholar] [CrossRef]
- Brovelli, M.A.; Mitasova, H.; Neteler, M.; Raghavan, V. Free and open source desktop and Web GIS solutions. Appl. Geomat. 2012, 4, 65–66. [Google Scholar] [CrossRef]
- Steiniger, S.; Hunter, A.J.S. The 2012 free and open source GIS software map—A guide to facilitate research, development, and adoption. Comput. Environ. Urban Syst. 2013, 39, 136–150. [Google Scholar] [CrossRef]
- QGIS Development Team QGIS. Un Sistema Di Informazione Geografica Libero e Open Source. Available online: https://qgis.org/it/site/ (accessed on 15 January 2021).
- Böhner, J.; Conrad, O. SAGA-System for Automated Geoscientific Analyses. Available online: http://www.saga-gis.org/en/index.html (accessed on 15 January 2021).
- GRASS Development Team GRASS GIS-Bringing Advanced Geospatial Technologies to the World. Available online: https://grass.osgeo.org/ (accessed on 15 January 2021).
- GDAL. GDAL Documentation. Available online: https://gdal.org/ (accessed on 15 January 2021).
- PostgreSQL Global Development Group PostgreSQL. Available online: https://www.postgresql.org/ (accessed on 15 January 2021).
- GeoServer. Available online: http://geoserver.org/ (accessed on 15 January 2021).
- Open Source Geospatial Foundation. MapServer 7.6.2 Documentation. Available online: https://mapserver.org/ (accessed on 15 January 2021).
- GeoNode. Available online: https://geonode.org/ (accessed on 15 January 2021).
- MicMac. Available online: https://micmac.ensg.eu/index.php/Accueil (accessed on 15 January 2021).
- Wu, C. VisualSFM: A Visual Structure from Motion System. Available online: http://ccwu.me/vsfm/ (accessed on 15 January 2021).
- OpenDroneMap Contributors. Drone Mapping Software. Available online: https://www.opendronemap.org/ (accessed on 15 January 2021).
- Grasso, S.; Claps, P.; Ganora, D.; Libertino, A. A Web-based Open-source Geoinformation Tool for Regional Water Resources Assessment. Water Resour. Manag. 2021, 35, 675–687. [Google Scholar] [CrossRef]
- Wei, M.; Liu, T.; Sun, B. Optimal Routing Design of Feeder Transit With Stop Selection Using Aggregated Cell Phone Data and Open Source GIS Tool. IEEE Trans. Intell. Transp. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Liu, X.; Long, Y. Automated Identification and Characterization of Parcels with OpenStreetMap and Points of Interest. Environ. Plan. B Plan. Des. 2016, 43, 341–360. [Google Scholar] [CrossRef]
- Mobasheri, A. (Ed.) An Introduction to Open Source Geospatial Science for Urban Studies. In Open Source Geospatial Science for Urban Studies: The Value of Open Geospatial Data; Springer: Cham, Switzerland, 2021; pp. 1–8. [Google Scholar]
- Bhunia, G.S.; Shit, P.K.; Sengupta, D. Free-Open Access Geospatial Data and Tools for Forest Resources Management. In Spatial Modeling in Forest Resources Management: Rural Livelihood and Sustainable Development; Shit, P.K., Pourghasemi, H.R., Das, P., Bhunia, G.S., Eds.; Springer: Cham, Switzerland, 2021; pp. 651–675. [Google Scholar]
- Takasu, T.; Yasuda, A. Development of the Low-Cost RTK-GPS Receiver with an Open Source Program Package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS, Karlsruhe, Germany, 22–23 September 2009; p. 6. [Google Scholar]
- Orfeo ToolBox–Orfeo ToolBox Is Not a Black Box. Available online: https://www.orfeo-toolbox.org/ (accessed on 10 January 2021).
- Congedo, L. Semi-Automatic Classification Plugin Documentation. Available online: https://semiautomaticclassificationmanual-v5.readthedocs.io/en/latest/ (accessed on 3 February 2021).
- Saiz-Rubio, V.; Rovira-Más, F. From Smart Farming towards Agriculture 5.0: A Review on Crop Data Management. Agronomy 2020, 10, 207. [Google Scholar] [CrossRef] [Green Version]
- Ono, T.; Iida, K.; Yamazaki, S. Achieving Sustainable Development Goals (SDGs) through ICT Services. Fujitsu Sci. Tech. J. 2017, 53, 17–22. [Google Scholar]
- United Nations. The Sustainable Development Goals Report 2019; United Nations: New York, NY, USA, 2019. [Google Scholar]
- Bramley, R.G.V. Progress in the Development of Precision Viticulture-Variation in Yield, Quality and Soil Proporties in Contrasting Australian Vineyards; Australian Wine Research Institute: Victoria, Australia, 2001. [Google Scholar]
- Zarco-Tejada, P.J.; Hubbard, N.; Loudjani, P. Precision Agriculture: An Opportunity for EU Farmers: Potential Support with the CAP 2014–2020; European Commission: Brussels, Belgium, 2014; p. 56. [Google Scholar]
- Cook, S.E.; Bramley, R.G.V. Precision agriculture—Opportunities, benefits and pitfalls of site-specific crop management in Australia. Aust. J. Exp. Agric. 1998, 38, 753–763. [Google Scholar] [CrossRef]
- Caffaro, F.; Cavallo, E. The Effects of Individual Variables, Farming System Characteristics and Perceived Barriers on Actual Use of Smart Farming Technologies: Evidence from the Piedmont Region, Northwestern Italy. Agriculture 2019, 9, 111. [Google Scholar] [CrossRef] [Green Version]
- Kritikos, M. Precision Agriculture in Europe: Legal, Social and Ethical Considerations; European Parliamentary Research Service: Brussels, Belgium, 2017. [Google Scholar]
- Mesas-Carrascosa, F.J.; Santano, D.V.; Meroño, J.E.; de la Orden, M.S.; García-Ferrer, A. Open source hardware to monitor environmental parameters in precision agriculture. Biosyst. Eng. 2015, 137, 73–83. [Google Scholar] [CrossRef]
- Adenle, A.A.; Sowe, S.K.; Parayil, G.; Aginam, O. Analysis of open source biotechnology in developing countries: An emerging framework for sustainable agriculture. Technol. Soc. 2012, 34, 256–269. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.A.; Viña, A.; Arkebauer, T.J.; Rundquist, D.C.; Keydan, G.; Leavitt, B. Remote estimation of leaf area index and green leaf biomass in maize canopies. Geophys. Res. Lett. 2003, 30. [Google Scholar] [CrossRef] [Green Version]
- Krintz, C.; Liu, B. SmartFarm: Improving Agriculture Sustainability Using Modern Information Technology; University of California: Santa Barbara, CA, USA, 2016; p. 6. [Google Scholar]
- Matese, A.; Di Gennaro, S.F. Practical Applications of a Multisensor UAV Platform Based on Multispectral, Thermal and RGB High Resolution Images in Precision Viticulture. Agriculture 2018, 8, 116. [Google Scholar] [CrossRef] [Green Version]
- Filippis, T.D.; Rocchi, L.; Fiorillo, E.; Genesio, L. A WebGIS application for precision viticulture: From research to operative practices. Available online: https://www.isprs.org/proceedings/XXXVIII/4-W13/ID_69.pdf (accessed on 6 February 2021).
- Rokhmana, C.A. The Potential of UAV-Based Remote Sensing for Supporting Precision Agriculture in Indonesia. Procedia Environ. Sci. 2015, 24, 245–253. [Google Scholar] [CrossRef] [Green Version]
- Puri, V.; Nayyar, A.; Raja, L. Agriculture drones: A modern breakthrough in precision agriculture. J. Stat. Manag. Syst. 2017, 20, 507–518. [Google Scholar] [CrossRef]
- Podagrosi, A. A FOSS Web Mapping Solution for Disparate Precision Agriculture Data. In Proceedings of the FOSS4G, Boston, MA, USA, 14–19 August 2017; p. 14. [Google Scholar]
- Trilles, S.; Torres-Sospedra, J.; Belmonte, Ó.; Zarazaga-Soria, F.J.; González-Pérez, A.; Huerta, J. Development of an open sensorized platform in a smart agriculture context: A vineyard support system for monitoring mildew disease. Sustain. Comput. Inform. Syst. 2019, 100309. [Google Scholar] [CrossRef]
- Ye, J.; Chen, B.; Liu, Q.; Fang, Y. A precision agriculture management system based on Internet of Things and WebGIS. In Proceedings of the 21st IEEE International Conference on Geoinformatics, Kaifeng, China, 20–22 June 2013. [Google Scholar] [CrossRef]
- Brocchini, D.; Chiabrando, F.; Colucci, E.; Sammartano, G.; Spanò, A.; Losè, L.T.; Villa, A. The Geomatics Contribution for the Valorisation Project in the Rocca of San Silvestro Landscape Site. ISPRS Int. J. Geo Inf. 2017, 42, 495–502. [Google Scholar] [CrossRef] [Green Version]
- Colucci, E. Architettura e Natura Di Paesaggi Archeologici Analisi Spaziali Integrate in Ambiente WEB-GIS per La Conservazione e La Comunicazione Della Memoria Storica: Il Parco Archeominerario Di San Silvestro. Master’s Thesis, Politecnico di Torino, Turin, Italy, 2017. [Google Scholar]
- Brovelli, M.A.; Magni, D. An Archaeological Web Gis Application Based on Mapserver and Postgis. Available online: https://www.isprs.org/proceedings/XXXIV/5-W12/proceedings/19.pdf (accessed on 3 March 2021).
- Grecea, C.; Herban, S.; Vilceanu, C.-B. WebGIS Solution for Urban Planning Strategies. Procedia Eng. 2016, 161, 1625–1630. [Google Scholar] [CrossRef] [Green Version]
- Pierce, F.J.; Clay, D. (Eds.) GIS Applications in Agriculture; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Open Geospatial Consortium. Finding OGC WMS, WFS, WCS Services. Available online: https://www.ogc.org/blog/2034 (accessed on 15 January 2021).
- European Commission: INSPIRE. Available online: https://inspire.ec.europa.eu/ (accessed on 15 January 2021).
- Mazzetto, F.; Gallo, R.; Sacco, P. Reflections and Methodological Proposals to Treat the Concept of “Information Precision” in Smart Agriculture Practices. Sensors 2020, 20, 2847. [Google Scholar] [CrossRef]
- Brancadoro, L.; Carnevali, P. Proximal Sensing per la Viticoltura Sito-Specifica. Available online: http://www.ricercatuscania.it/data/files/finale/4_Linea_A2_Diprove.pdf (accessed on 6 April 2021).
- Cina, A.; Dabove, P.; Manzino, A.M.; Piras, M. Network Real Time Kinematic (NRTK) Positioning–Description, Architectures and Performances. In Satellite Positioning—Methods, Models and Applications; IntechOpen: London, UK, 2015. [Google Scholar] [CrossRef] [Green Version]
- Kumar, L.; Schmidt, K.; Dury, S.; Skidmore, A. Imaging Spectrometry and Vegetation Science. In Imaging Spectrometry: Basic Principles and Prospective Applications; Springer: Berlin/Heidelberg, Germany, 2002; pp. 111–155. [Google Scholar]
- SlantRange. Precision Agriculture Technology, Sensors and Analytics. Available online: https://slantrange.com/ (accessed on 15 January 2021).
- Wagner, W. Radiometric calibration of small-footprint full-waveform airborne laser scanner measurements: Basic physical concepts. ISPRS Int. J. Geo Inf. 2010, 65, 505–513. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.; Agarwal, S.; Curless, B.; Seitz, S.M. Multicore bundle adjustment. In Proceedings of the 24th IEEE Conference on Computer Vision and Pattern Recognition, Colorado Springs, CO, USA, 20–25 June 2011; pp. 3057–3064. [Google Scholar]
- PASTEL. Available online: https://web.archive.org/web/20071227030420/http://pastel.paristech.org/1745/ (accessed on 18 December 2020).
- CloudCompare—Open Source Project. Available online: http://www.cloudcompare.org/ (accessed on 18 December 2020).
- Richards, J.A.; Jia, X. Remote Sensing Digital Image Analysis: An Introduction, 4th ed.; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Huete, A.; Justice, C.; Liu, H. Development of vegetation and soil indices for MODIS-EOS. Remote. Sens. Environ. 1994, 49, 224–234. [Google Scholar] [CrossRef]
- Henrich, V.; Krauss, G.; Götze, C.; Sandow, C. The IndexDatabase; University of Bonn: Bonn, Germany, 2011. [Google Scholar]
- Rouse, J.W. Monitoring the Vernal Advancement and Netrogradation of Natural Vegetation; Texas A&M University: College Station, TX, USA, 1973. [Google Scholar]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Taskos, D.G.; Koundouras, S.; Stamatiadis, S.; Zioziou, E.; Nikolaou, N.; Karakioulakis, K.; Theodorou, N. Using active canopy sensors and chlorophyll meters to estimate grapevine nitrogen status and productivity. Precis. Agric. 2015, 16, 77–98. [Google Scholar] [CrossRef]
- Agafonkin, V. Leaflet—A JavaScript Library for Interactive Maps. Available online: https://leafletjs.com/ (accessed on 15 January 2021).
- Jung, J.; Maeda, M.; Chang, A.; Bhandari, M.; Ashapure, A.; Landivar-Bowles, J. The potential of remote sensing and artificial intelligence as tools to improve the resilience of agriculture production systems. Curr. Opin. Biotechnol. 2021, 70, 15–22. [Google Scholar] [CrossRef] [PubMed]
- PIC4SeR PoliTO Interdepartmental Centre for Service Robotics. Available online: https://pic4ser.polito.it/ (accessed on 6 April 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DJI Matrice 210 V2 |  |
|
| SlantRange 4P+ |  |
|
| Precision Navigation Module(LIDAR) + Ambient Illumination Sensor (AIS) |  |
|
| Class | Description | ||
|---|---|---|---|
| I classification | Shadows | The flight was realised in the afternoon. Well-defined shadows are present on the scene. |  |
| Rows | The vineyard rows are constituted by several grape trees in which vines grow together on three metal wires parallel to the ground. This cultivation structure is typical and does not allow the detection of single trees from aerial nadiral views (like the one of the present UAVs survey). |  | |
| Dense Herbaceous Vegetation | To facilitate the mechanisation of farming activities and the use of tractors, the vineyards are mowed, or herbicides are used. This class indicates the area in with the herbaceous vegetation is at an advanced stage of development. |  | |
| Sparse Herbaceous Vegetation | This class indicates the area in which the herbaceous vegetation is dry or at an early stage of development. |  | |
| II classification | Shaded Dense Herbaceous Vegetation | Same characteristics of Dense Herbaceous Vegetation class, but in shade condition. It is a service sub-class created to facilitate the classification. The Shaded Dense Herbaceous Vegetation is merged with the Dense Herbaceous Vegetation in the post-processing phase. |  |
| Shaded Sparse Herbaceous Vegetation | Same characteristics of Sparse Herbaceous Vegetation class, but in shade condition. It is a service sub-class created to facilitate the classification. The Shaded Dense Herbaceous Vegetation is merged with the Sparse herbaceous vegetation in the post-processing phase. |  |
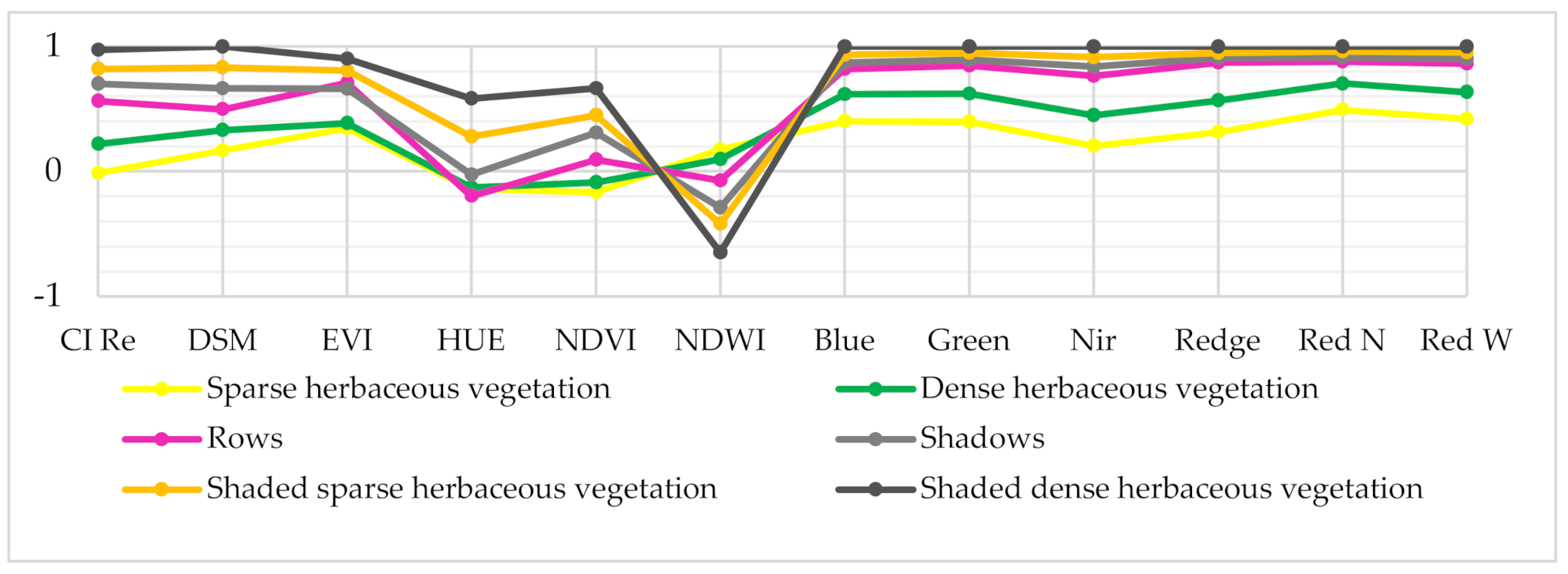
| Feature Name | Formula |
|---|---|
| Chlorophyll Index Red edge (CI Re) [34] | |
| Enhanced Vegetation Index (EVI), [61] | |
| Hue Index [62] | |
| Normalised Difference Vegetation Index (NDVI), [63] | |
| Normalised Difference Water Index (NDWI), [64] |
| Classification I | Sparse Herbaceous Vegetation | Dense Herbaceous Vegetation | Rows | Shadows | Total |
|---|---|---|---|---|---|
| Sparse herbaceous vegetation | 95 | 4 | 0 | 1 | 100 |
| Dense herbaceous vegetation | 2 | 94 | 1 | 3 | 100 |
| Rows | 0 | 3 | 96 | 1 | 100 |
| Shadows | 0 | 7 | 0 | 93 | 100 |
| Total | 97 | 108 | 97 | 98 | |
| PA | 0.979 | 0.870 | 0.990 | 0.949 | OA= |
| UA | 0.950 | 0.940 | 0.960 | 0.930 | 0.945 |
| F1-score | 0.964 | 0.904 | 0.975 | 0.939 |
| Classification II | Shaded Sparse Herbaceous Vegetation | Shaded Dense Herbaceous Vegetation | Total |
|---|---|---|---|
| Shaded sparse herbaceous vegetation | 98 | 2 | 100 |
| Shaded dense herbaceous vegetation | 8 | 92 | 100 |
| Total | 106 | 94 | |
| PA | 0.925 | 0.979 | OA= |
| UA | 0.980 | 0.920 | 0.950 |
| F1-score | 0.951 | 0.948 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belcore, E.; Angeli, S.; Colucci, E.; Musci, M.A.; Aicardi, I. Precision Agriculture Workflow, from Data Collection to Data Management Using FOSS Tools: An Application in Northern Italy Vineyard. ISPRS Int. J. Geo-Inf. 2021, 10, 236. https://doi.org/10.3390/ijgi10040236
Belcore E, Angeli S, Colucci E, Musci MA, Aicardi I. Precision Agriculture Workflow, from Data Collection to Data Management Using FOSS Tools: An Application in Northern Italy Vineyard. ISPRS International Journal of Geo-Information. 2021; 10(4):236. https://doi.org/10.3390/ijgi10040236
Chicago/Turabian StyleBelcore, Elena, Stefano Angeli, Elisabetta Colucci, Maria Angela Musci, and Irene Aicardi. 2021. "Precision Agriculture Workflow, from Data Collection to Data Management Using FOSS Tools: An Application in Northern Italy Vineyard" ISPRS International Journal of Geo-Information 10, no. 4: 236. https://doi.org/10.3390/ijgi10040236
APA StyleBelcore, E., Angeli, S., Colucci, E., Musci, M. A., & Aicardi, I. (2021). Precision Agriculture Workflow, from Data Collection to Data Management Using FOSS Tools: An Application in Northern Italy Vineyard. ISPRS International Journal of Geo-Information, 10(4), 236. https://doi.org/10.3390/ijgi10040236