
An Efficient 2.5D Shadow Detection Algorithm for Urban Planning and Design Using a Tensor Based Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- Calculating the amount of time a given roof or facade is shaded, to determine the utility of installing photovoltaic cells for electricity production [2].
- (2)
- Calculating shadow footprint on vegetated areas, to determine the expected influence of a tall new building on the surrounding microclimate [3].
- (3)
- Daylight access; Shadow impact calculation to maximize the use of private residential amenity spaces during spring, summer, and fall (Standards For Shadow Studies— http://www.mississauga.ca, accessed on 12 June 2021; Shadow Impact Analysis—https://www.cityofdavis.org, accessed on 25 November 2020).
- The algorithm was limited to the buildings only. The base height of the buildings was calculated using 3Dfier (https://github.com/tudelft3d/3dfier, accessed on 22 March 2019) developed by Delft University. 3Dfier uses the LOD1 model [25] in which blocks represent buildings; Therefore, it overlooks accurate building height.
- the shadow point calculation algorithm was not parallelized. Hence time-consuming.
2. Methodology
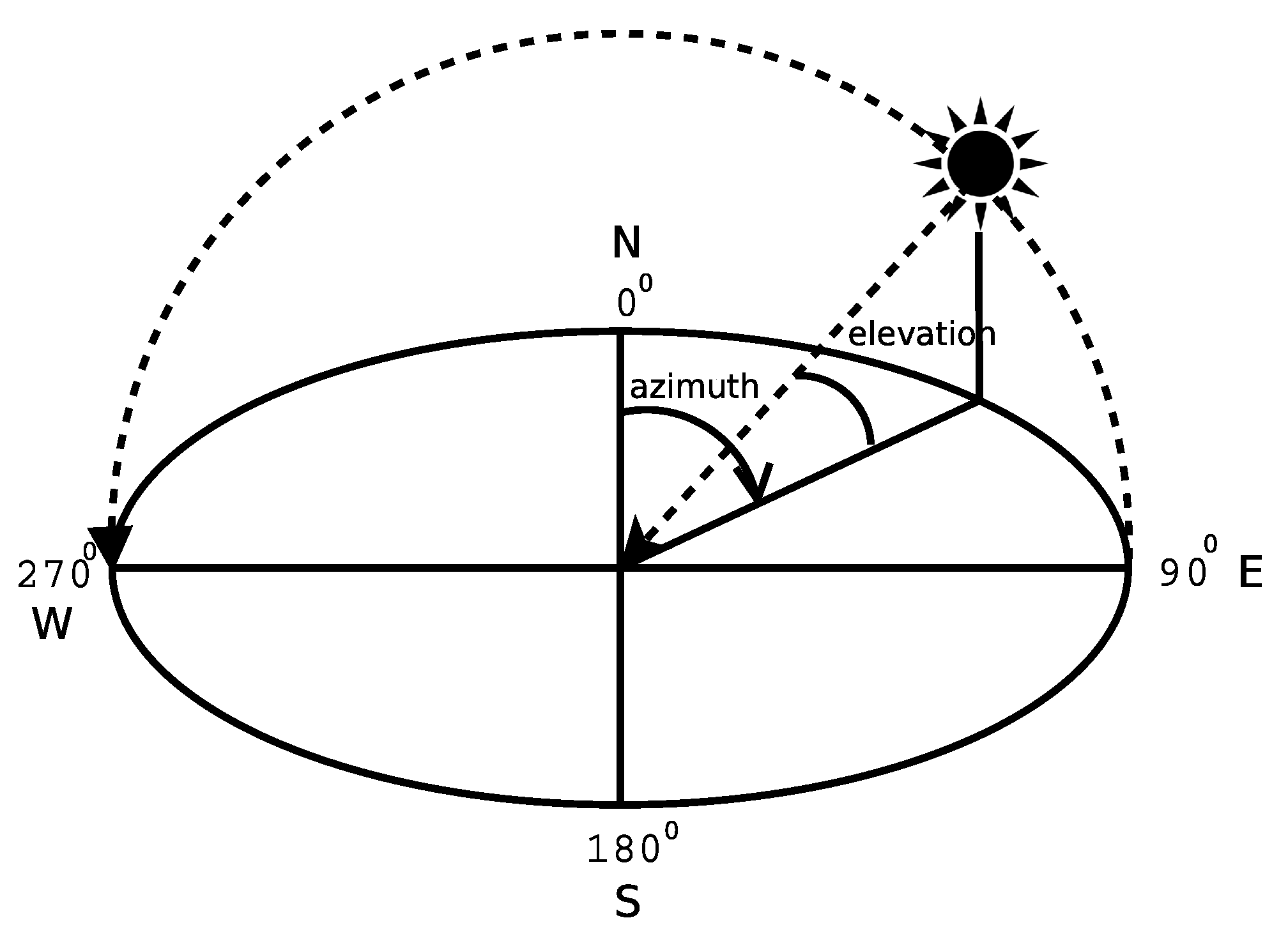
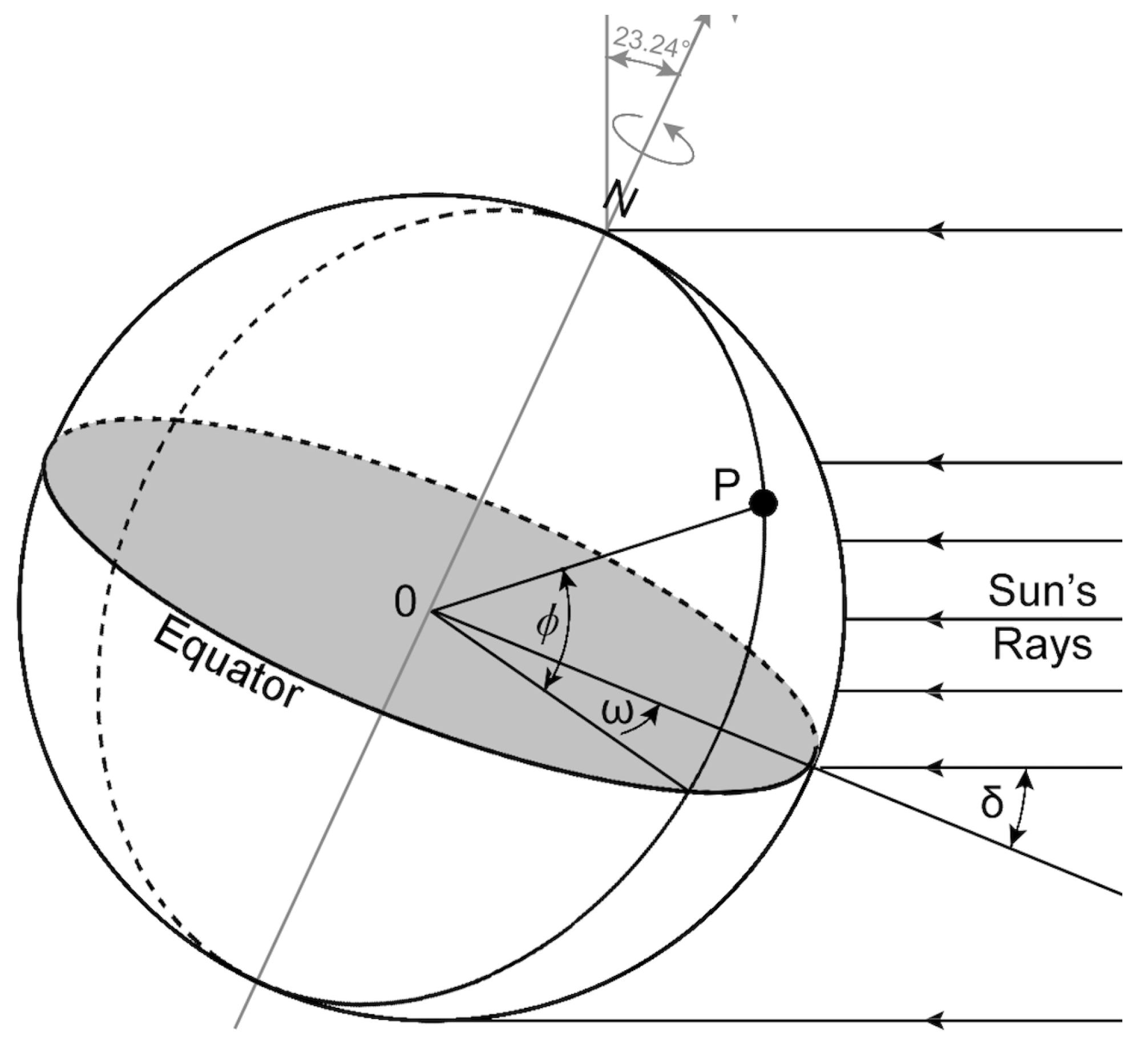
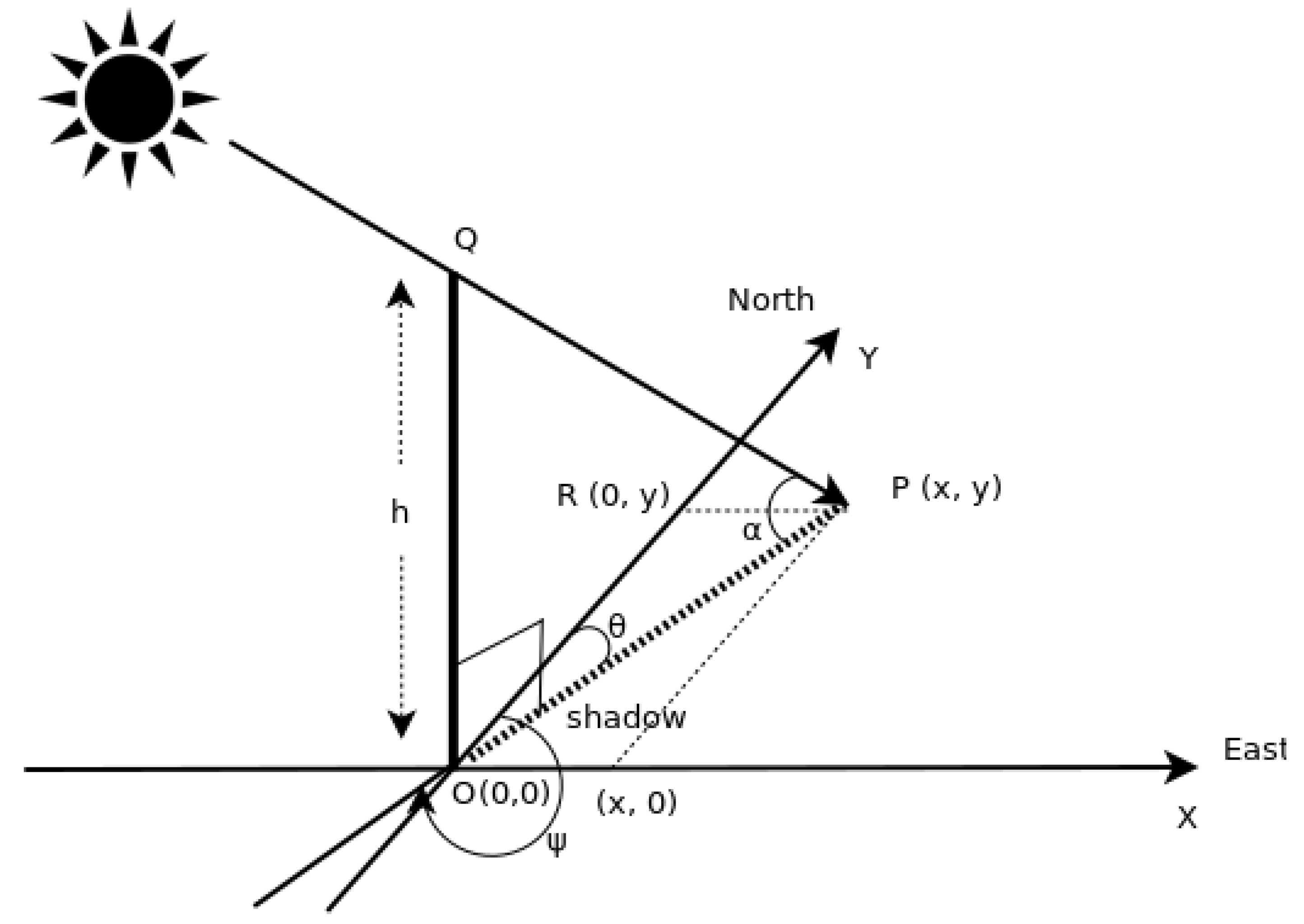
2.1. Shadow Geometry
| Algorithm 1 Sun Position Calculation from Sunrise to Sunset |
|
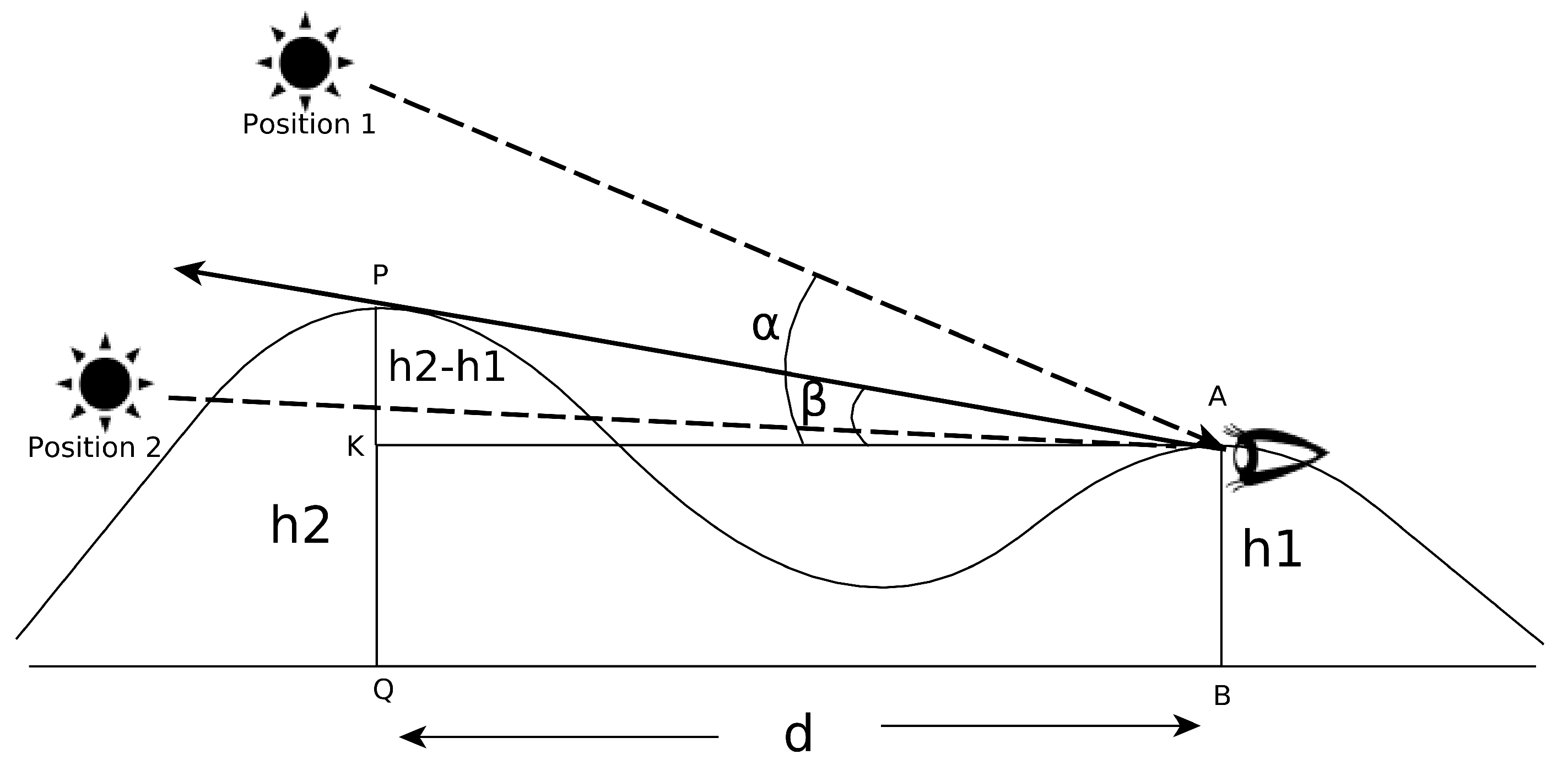
2.2. Shadow Condition on DSM
2.3. 2.5D Shadow Calculation Algorithm on DSM
- : Given region specified by north- south-east-west coordinates .
- date: Given date.
- time: Given time.
- D: For any location (x,y) within R, D is the radius of the neighborhood centering (x,y).
- DSM: Digital Surface Model of R.
| Algorithm 2 Calculate Shadow Top |
|
| Algorithm 3 Calculate Shadow On Digital Surface Model |
|
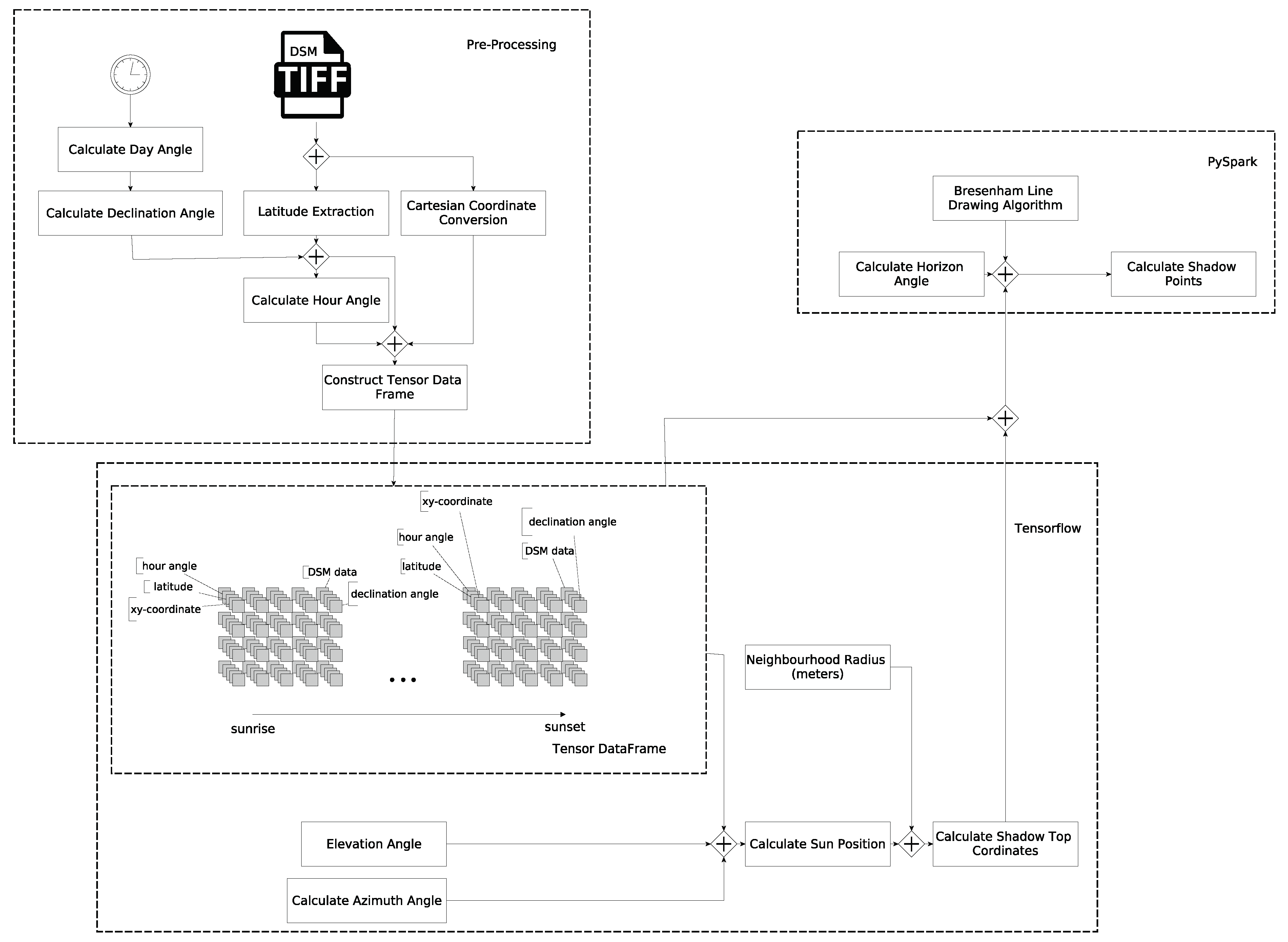
3. Proof-of-Concept
- Tensor data-frame construction.
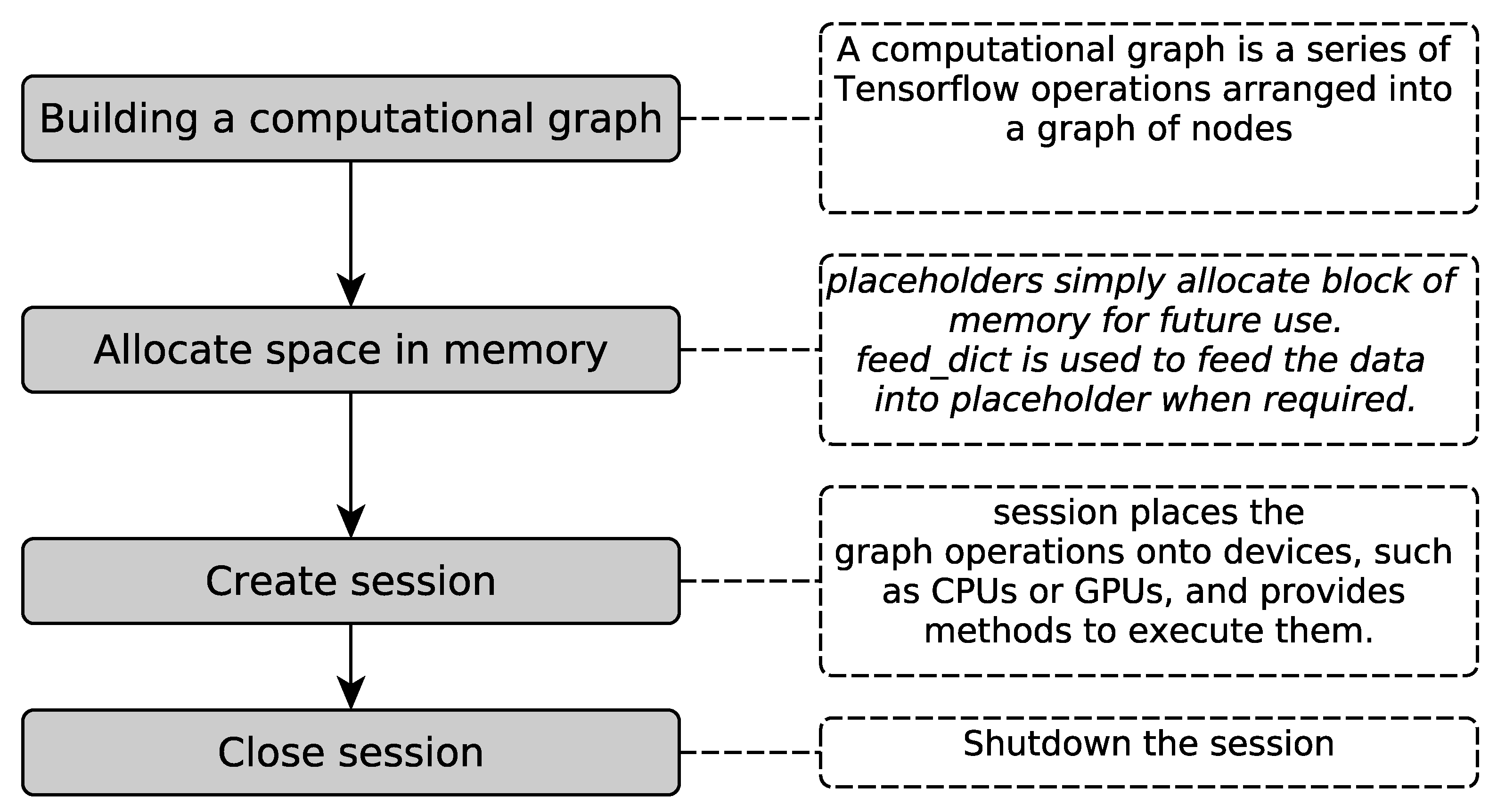
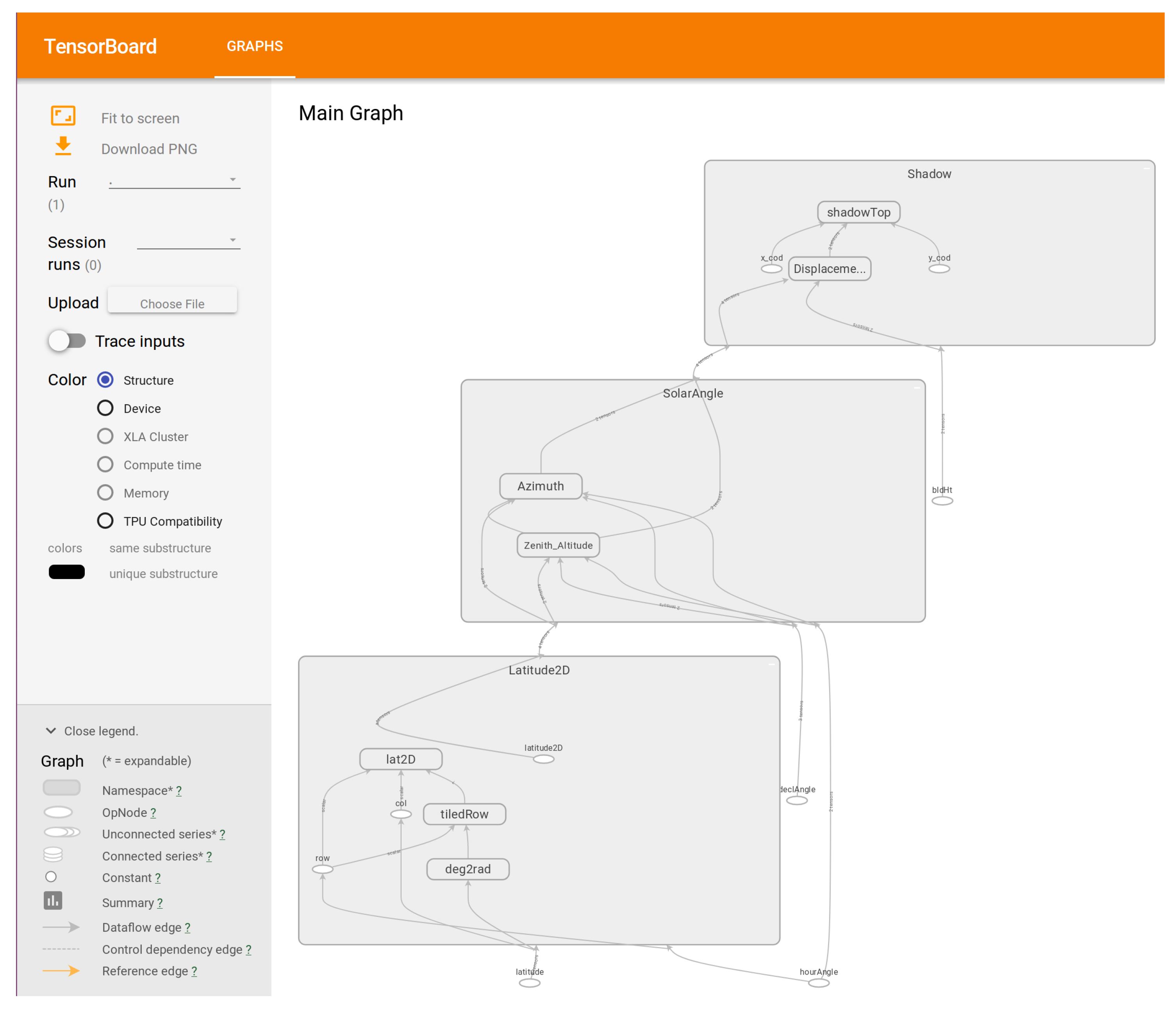
- Sun position and shadow-top coordinate generation (using Tensorflow).
- Shadow points detection (using PySpark).
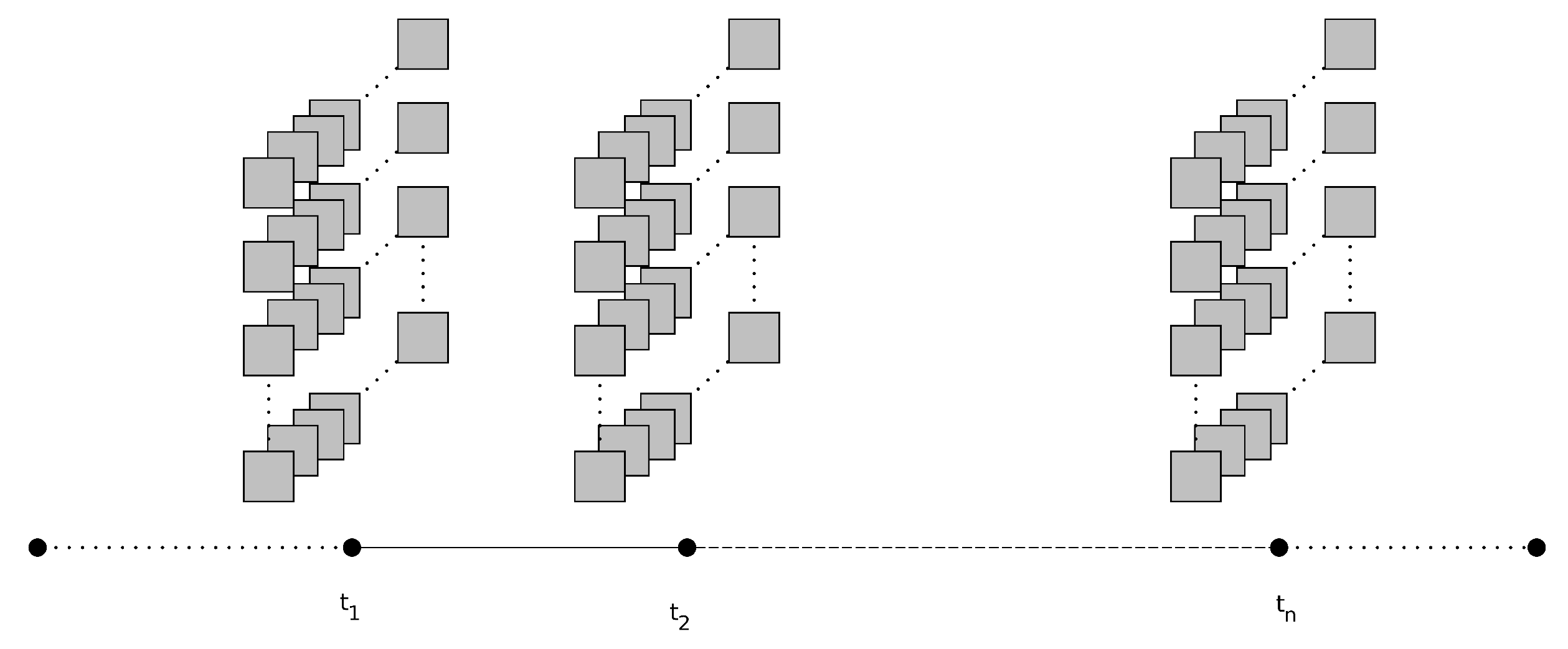
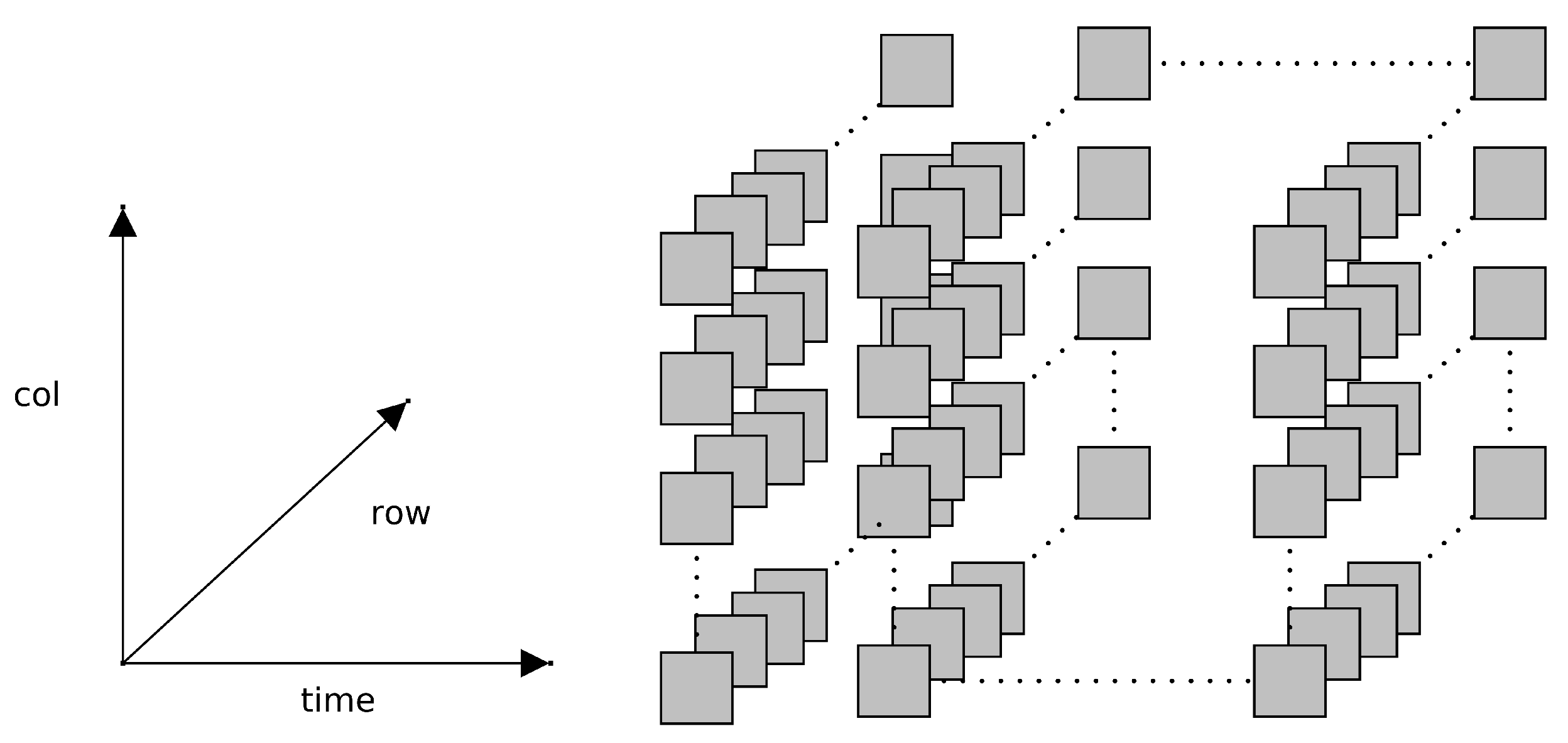
3.1. Tensor Data-Frame Construction
3.2. Sun Position and Shadow-Top Coordinate Generation
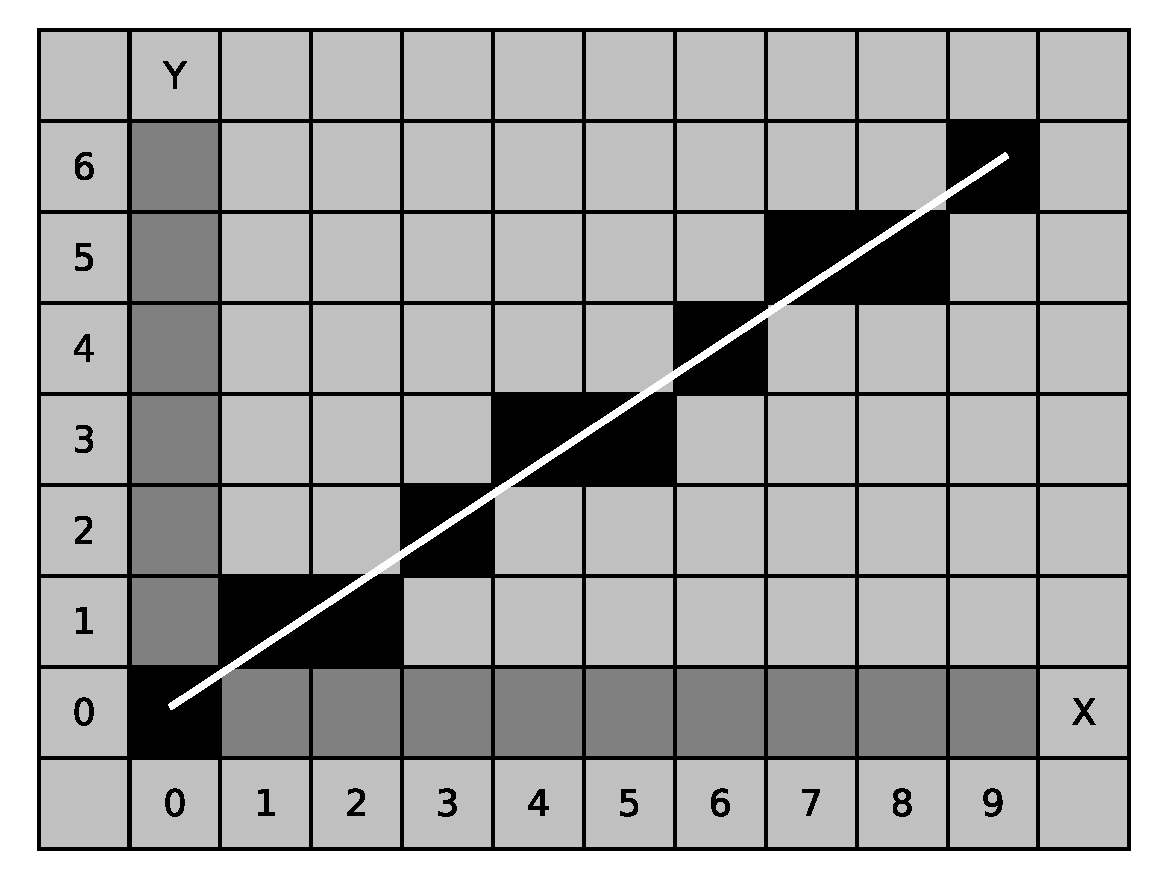
3.3. Shadow Point Detection
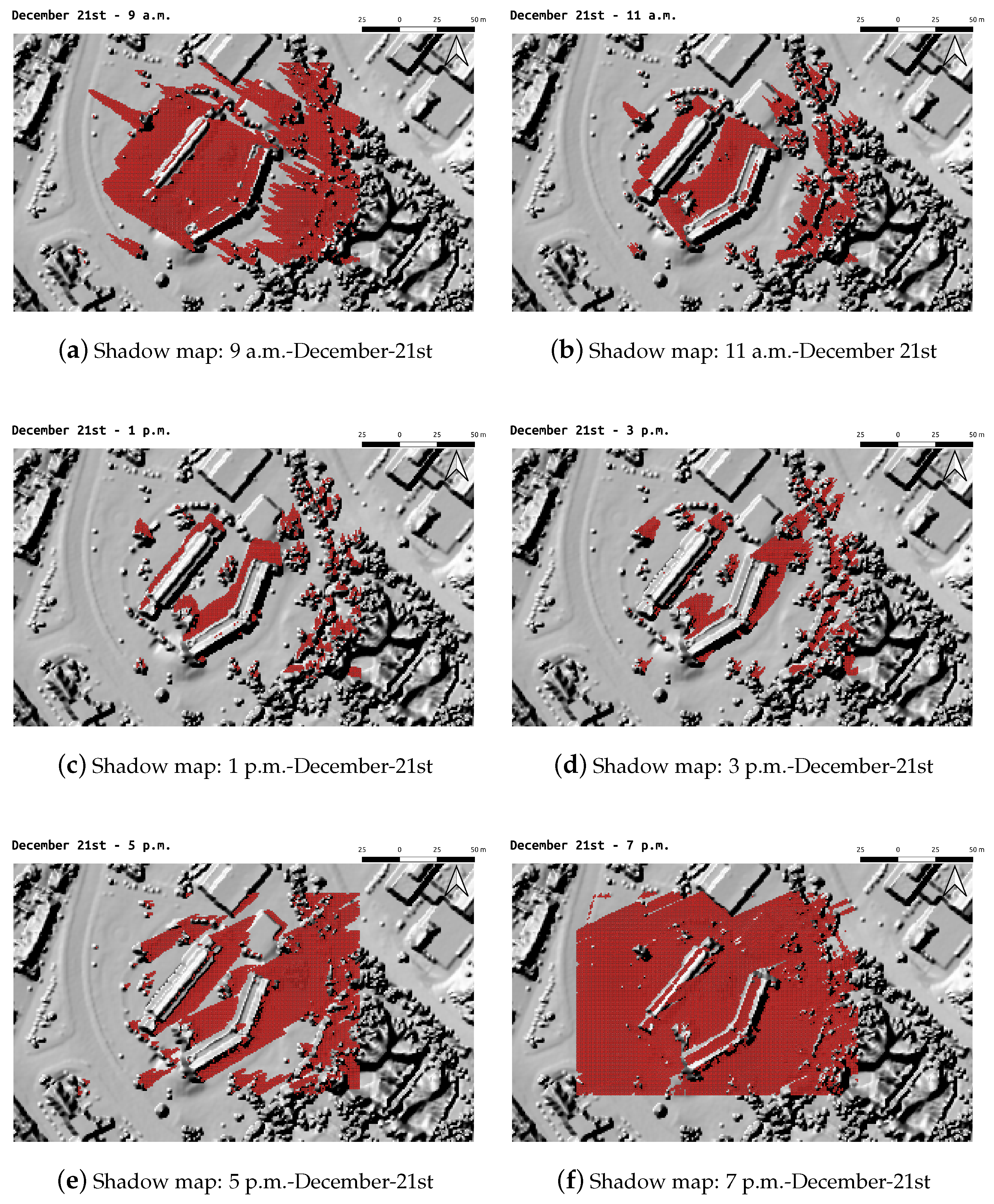
4. Experimental Results and Discussions
5. Conclusions
- Calculating mathematical expressions, in a more optimized and efficient manner, using tensors;
- Transparent use of GPU computing—CPU and GPU compatibility at the same time without changing the code;
- Underlying data-flow based implementation offers implicit parallelism and distributed execution with high scalability.
- GRASS GIS [17] ‘Add-on’ compatibility.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Biljecki, F.; Stoter, J.E.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D City Models: State of the Art Review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Redweik, C.P.; Britoac, M. Solar energy potential on roofs and facades in an urban landscape. Renew. Energy 2013, 97, 332–341. [Google Scholar] [CrossRef]
- Bourbia, F.; Boucheriba, F. Impact of street design on urban microclimate for semi arid climate (Constantine). Renew. Energy 2010, 35, 343–347. [Google Scholar] [CrossRef]
- Max, N.L. Horizon mapping: Shadows for bump-mapped surfaces. Vis. Comput. 1988, 4, 109–117. [Google Scholar] [CrossRef]
- Blinn, J.F. Simulation of Wrinkled Surfaces. In Proceedings of the 5th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’78, Atlanta, GA, USA, 23–25 August 1978; ACM: New York, NY, USA, 1978; pp. 286–292. [Google Scholar] [CrossRef]
- Cook, R.L. Shade Trees. In Proceedings of the 11th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’84, Minneapolis, MN, USA, 23–27 July 1984; ACM: New York, NY, USA, 1984; pp. 223–231. [Google Scholar] [CrossRef]
- Williams, L. Casting Curved Shadows on Curved Surfaces. In Proceedings of the 5th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’78, Atlanta, GA, USA, 23–25 August 1978; ACM: New York, NY, USA, 1978; pp. 270–274. [Google Scholar] [CrossRef]
- Reeves, W.T.; Salesin, D.H.; Cook, R.L. Rendering Antialiased Shadows with Depth Maps. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’87, Anaheim, CA, USA, 27–31 July 1987; ACM: New York, NY, USA, 1987; pp. 283–291. [Google Scholar] [CrossRef]
- Crow, F.C. Shadow Algorithms for Computer Graphics. In Proceedings of the 4th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’77, San Jose, CA, USA, 20–22 July 1977; ACM: New York, NY, USA, 1977; pp. 242–248. [Google Scholar] [CrossRef]
- Becker, B.G.; Max, N.L. Smooth Transitions Between Bump Rendering Algorithms. In Proceedings of the 20th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’93, Anaheim, CA, USA, 2–6 August 1993; ACM: New York, NY, USA, 1993; pp. 183–190. [Google Scholar] [CrossRef]
- Wang, L.; Wang, X.; Tong, X.; Lin, S.; Hu, S.; Guo, B.; Shum, H.Y.; Shum, H.Y.; Shum, H.Y. View-Dependent Displacement Mapping; ACM SIGGRAPH 2003 Papers; ACM: New York, NY, USA, 2003; pp. 334–339. [Google Scholar] [CrossRef]
- Onoue, K.; Max, N.; Nishita, T. Real-Time Rendering of Bumpmap Shadows Taking Account of Surface Curvature. In Proceedings of the 2004 International Conference on Cyberworlds, Tokyo, Japan, 18–20 November 2004; pp. 312–318. [Google Scholar] [CrossRef]
- Appel, A. Some Techniques for Shading Machine Renderings of Solids. In Proceedings of the Spring Joint Computer Conference, AFIPS ’68 (Spring), Atlantic City, NJ, USA, 30 April 30–2 May 1968; ACM: New York, NY, USA, 1968; pp. 37–45. [Google Scholar] [CrossRef]
- Kumar, L.; Skidmore, A.K.; Knowles, E. Modelling Topographic Variation in Solar Radiation in a GIS Environment. Int. J. Geogr. Inf. Sci. 1997, 11, 475–497. [Google Scholar] [CrossRef]
- Ratti, P.R.C. Raster analysis of urban form. Environ. Plan. B Plan. Des. 2004, 31, 297–309. [Google Scholar] [CrossRef]
- Hofierka, J.; Suri, M.; Šúri, M. The solar radiation model for Open source GIS: Implementation and applications. In Proceedings of the Open Source GIS—GRASS Users Conference, Trento, Italy, 11–13 September 2002; pp. 1–19. [Google Scholar]
- GRASS Development Team. Geographic Resources Analysis Support System (GRASS GIS) Software, Version 7.2; Open Source Geospatial Foundation: Beaverton, OR, USA, 2017. [Google Scholar]
- Lindberg, F.; Grimmond, C.; Gabey, A.; Huang, B.; Kent, C.; Sun, T.; Theeuwes, N.; Järvi, L.; Ward, H.; Capel-Timms, I.; et al. Urban Multi-scale Environmental Predictor (UMEP): An integrated tool for city-based climate services. Environ. Model. Softw. 2018, 99, 70–87. [Google Scholar] [CrossRef]
- QGIS Development Team. QGIS Geographic Information System; Open Source Geospatial Foundation: Beaverton, OR, USA, 2019. [Google Scholar]
- Corripio, J.G. Insol: Solar Radiation; R Package Version 1.1.1; The R Foundation for Statistical Computing: Vienna, Austria, 2014. [Google Scholar]
- Dorman, M. Shadow: Geometric Shadow Calculations; R Package Version 0.5.0; The R Foundation for Statistical Computing: Vienna, Austria, 2018. [Google Scholar]
- Fu, P.; Rich, P. Design and implementation of the Solar Analyst: An ArcView extension for modeling solar radiation at landscape scales. In Proceedings of the 19th Annual ESRI User Conference, San Diego, CA, USA, 26–30 July 1999; pp. 1–31. [Google Scholar]
- Bhattacharya, S.; Braun, C.; Leopold, U. A Novel 2.5D Shadow Calculation Algorithm for Urban Environment. In Proceedings of the 5th International Conference on Geographical Information Systems Theory, Applications and Management, GISTAM 2019, Heraklion, Crete, Greece, 3–5 May 2019; pp. 274–281. [Google Scholar] [CrossRef]
- MacEachren, A.M. How Maps Work—Representation, Visualization, and Design; Guilford Press: Abingdon, VA, USA, 21 June 2004. [Google Scholar]
- Gröger, G.; Kolbe, T.H.; Nagel, C.; Häfele, K.H. OGC City Geography Markup Language (CityGML) Encoding Standard, 2.0.0 ed.; Open Geospatial Consortium: Wayland, MA, USA, 2012. [Google Scholar]
- Kuang, L.; Hao, F.; Yang, L.T.; Lin, M.; Luo, C.; Min, G. A Tensor-Based Approach for Big Data Representation and Dimensionality Reduction. IEEE Trans. Emerg. Top. Comput. 2014, 2, 280–291. [Google Scholar] [CrossRef]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. 2015. Available online: tensorflow.org (accessed on 1 June 2020).
- Nandi, A. Spark for Python Developers; Packt Publishing: Birmingham, UK, 2015. [Google Scholar]
- Zaharia, M.; Chowdhury, M.; Franklin, M.J.; Shenker, S.; Stoica, I. Spark: Cluster Computing with Working Sets. In Proceedings of the 2nd USENIX Conference on Hot Topics in Cloud Computing, HotCloud’10, Boston, MA, USA, 22 June 2010; USENIX Association: Berkeley, CA, USA, 2010. [Google Scholar]
- Bresenham, J.E. Algorithm for Computer Control of a Digital Plotter. IBM Syst. J. 1965, 4, 25–30. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Braun, C.; Leopold, U. A Tensor Based Framework for Large Scale Spatio-Temporal Raster Data Processing. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-4/W14, 3–9. [Google Scholar] [CrossRef] [Green Version]
- San Jose, R.; Perez, J.L.; Gonzalez, R.M. Implementation of Two Different Shadow Models into EULAG Model: Madrid Case Study. In Large-Scale Scientific Computing; Lirkov, I., Margenov, S., Waśniewski, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 316–323. [Google Scholar]
- Madlener, R.; Sunak, Y. Impacts of urbanization on urban structures and energy demand: What can we learn for urban energy planning and urbanization management? Sustain. Cities Soc. 2011, 1, 45–53. [Google Scholar] [CrossRef]
- Niemasz, J.; Sargent, J.; Reinhart, C.F. Solar Zoning and Energy in Detached Dwellings. Environ. Plan. B Plan. Des. 2013, 40, 801–813. [Google Scholar] [CrossRef]
- Bellman, R. Dynamic Programming, 1st ed.; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhattacharya, S.; Braun, C.; Leopold, U. An Efficient 2.5D Shadow Detection Algorithm for Urban Planning and Design Using a Tensor Based Approach. ISPRS Int. J. Geo-Inf. 2021, 10, 583. https://doi.org/10.3390/ijgi10090583
Bhattacharya S, Braun C, Leopold U. An Efficient 2.5D Shadow Detection Algorithm for Urban Planning and Design Using a Tensor Based Approach. ISPRS International Journal of Geo-Information. 2021; 10(9):583. https://doi.org/10.3390/ijgi10090583
Chicago/Turabian StyleBhattacharya, Sukriti, Christian Braun, and Ulrich Leopold. 2021. "An Efficient 2.5D Shadow Detection Algorithm for Urban Planning and Design Using a Tensor Based Approach" ISPRS International Journal of Geo-Information 10, no. 9: 583. https://doi.org/10.3390/ijgi10090583
APA StyleBhattacharya, S., Braun, C., & Leopold, U. (2021). An Efficient 2.5D Shadow Detection Algorithm for Urban Planning and Design Using a Tensor Based Approach. ISPRS International Journal of Geo-Information, 10(9), 583. https://doi.org/10.3390/ijgi10090583