
An Improved WiFi/PDR Integrated System Using an Adaptive and Robust Filter for Indoor Localization


Abstract
:1. Introduction
2. Indoor Positioning Model
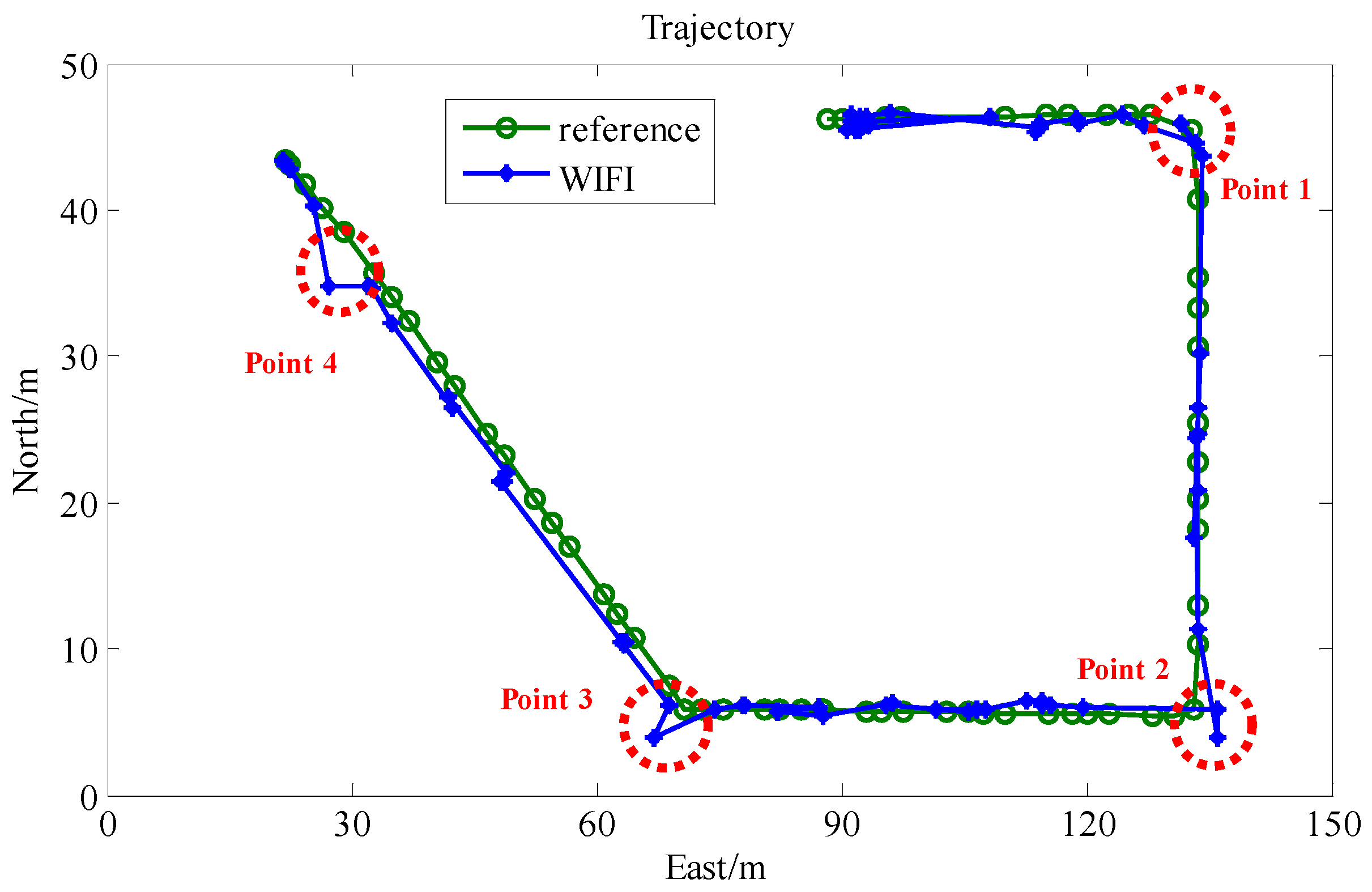
2.1. WiFi Positioning Technology
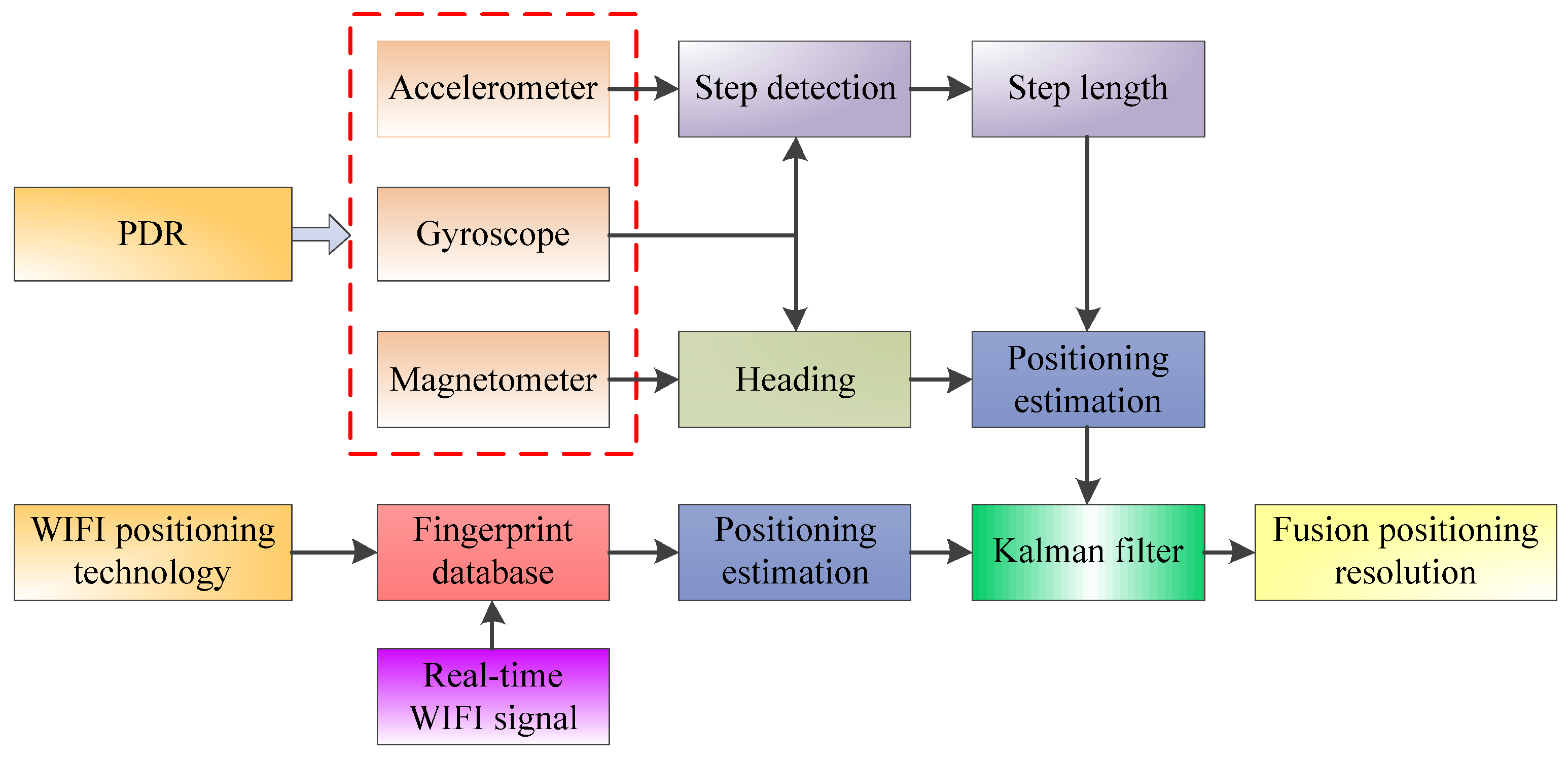
2.2. PDR Based on Inertial Measurement
3. WiFi/PDR Integrated System
3.1. Dynamic Model
3.2. Observation Model
3.3. Fusion Algorithm with Kalman Filter
4. An Adaptive and Robust Filter Based on Scenario and Motion State Cognition
4.1. Adaptive Filter Based on Scenario and Motion State Recognition
- The type of pedestrian path affects the accuracy of state parameter θ. The variance of dθ is large when the pedestrian turns () and smaller when he/she moves straight (). The type of pedestrian path can be judged by the accumulated values of the gyroscope data.
- The path environment affects the accuracy of state parameters N and E. In a corridor region, there are only two directions of motion available. In an open region, the uncertainty of motion direction is very large. The accuracy of state parameters N and E is therefore higher in a corridor than in an open region. When the pedestrian is located in a corridor, ; when the pedestrian is located in an open region, . The path environment can be determined by the strength of the WiFi signal.
- The velocity affects the accuracy of the step length calculation. Hence, there is a strong relation between the velocity and state parameter s. The variance of ds is large when the pedestrian moves at a slow or fast speed (), and small when moving at normal speed (). The velocity can be determined by the accumulated values of the accelerometer data.
4.2. Robust Kalman Filter Based on Mahalanobis Distance
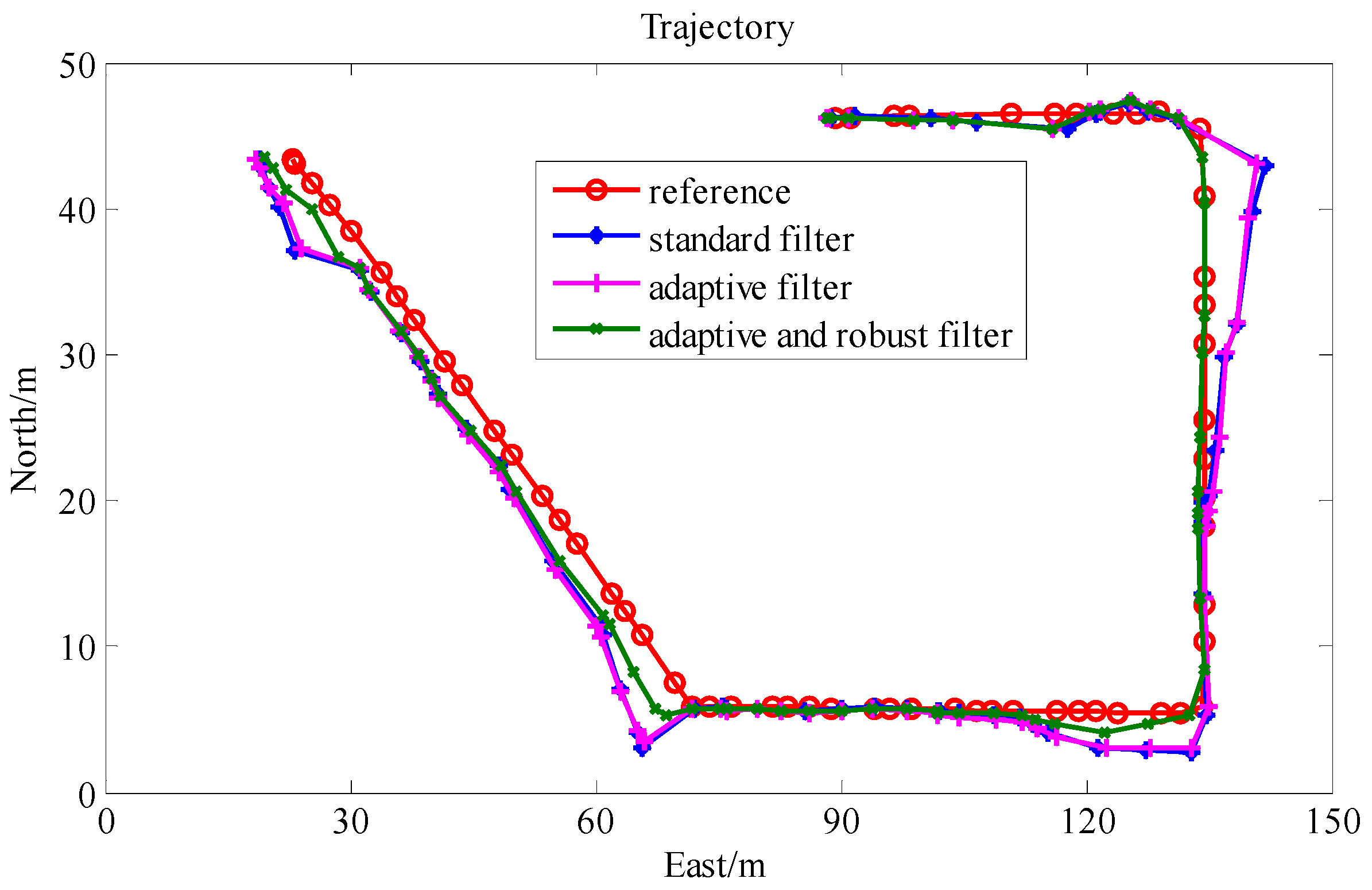
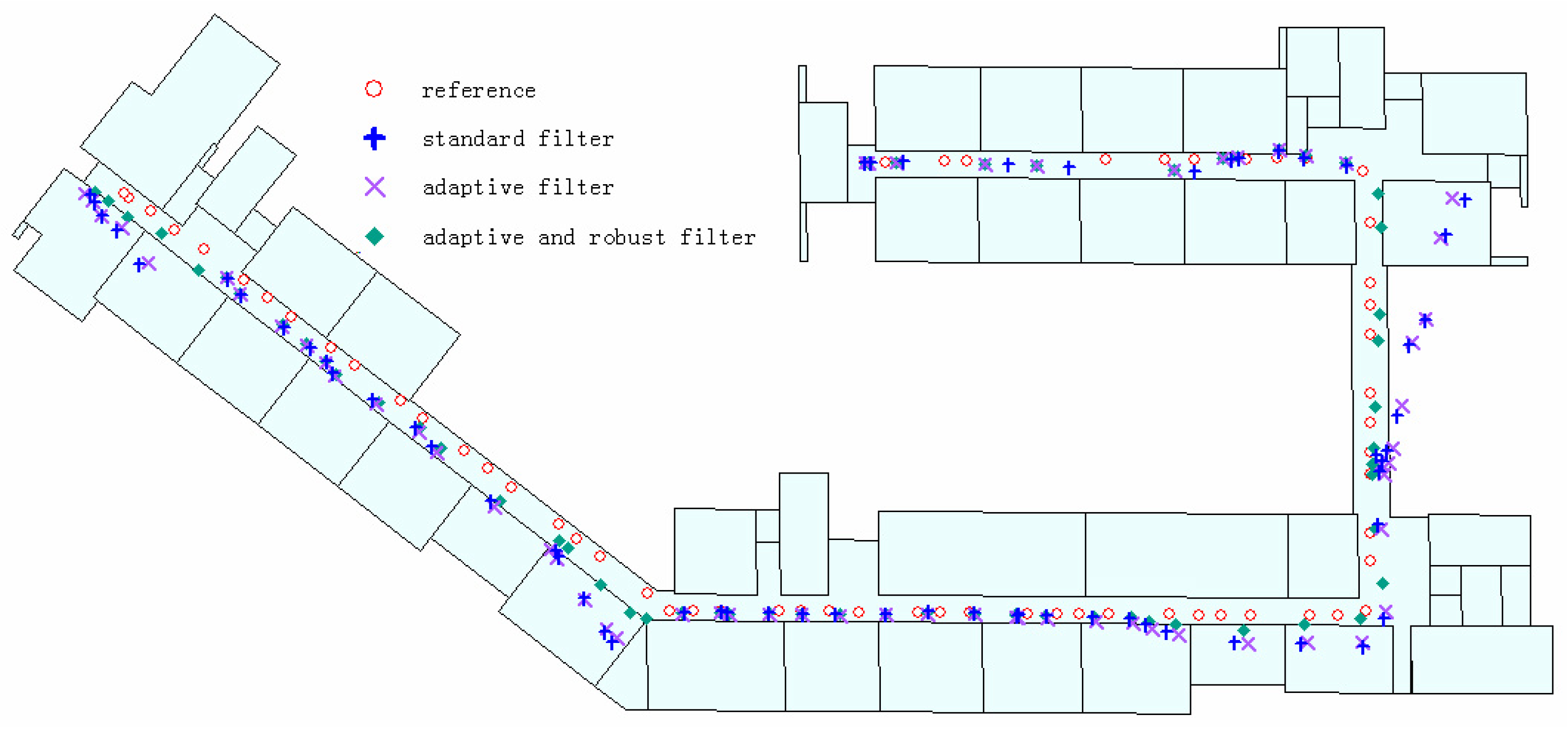
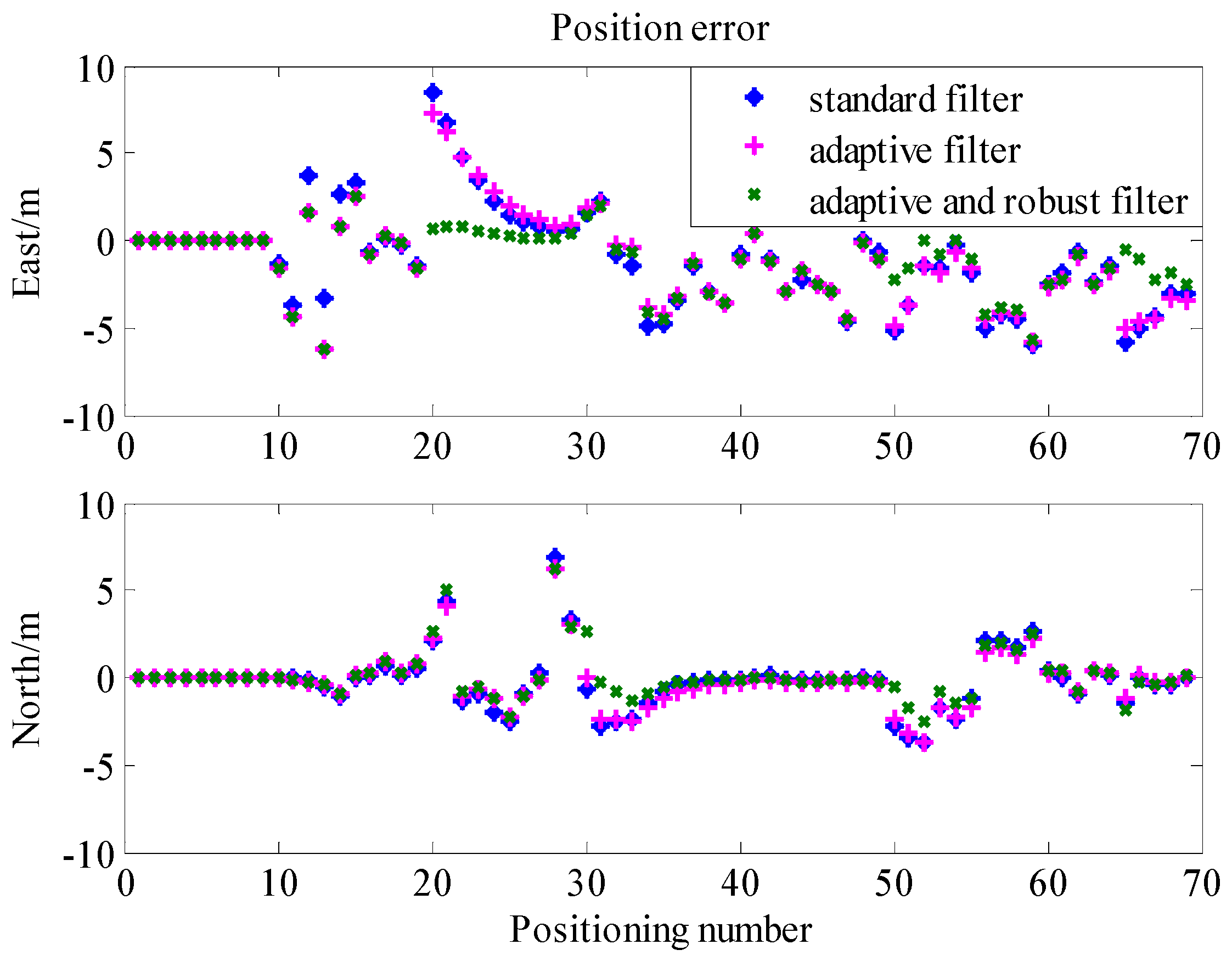
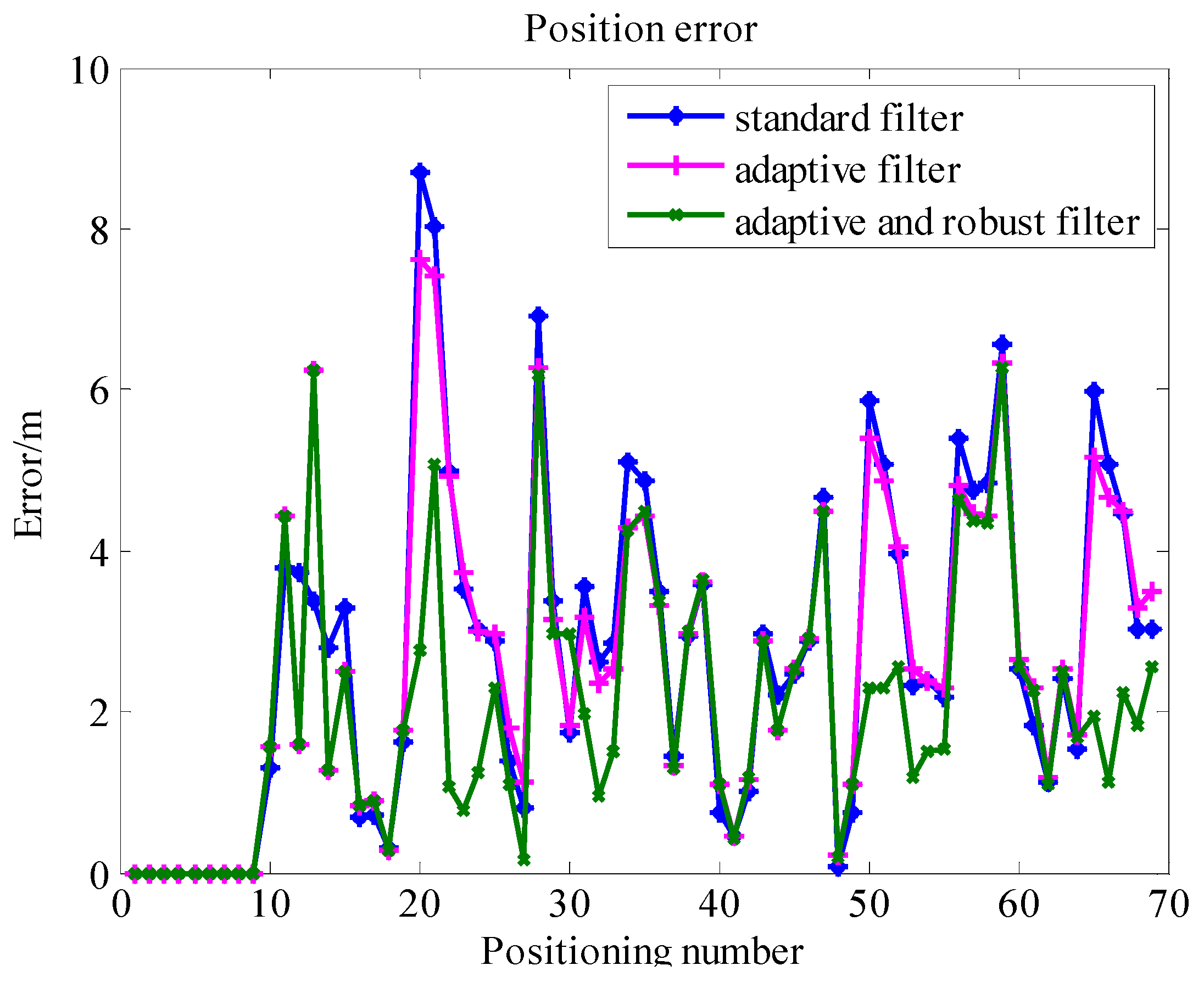
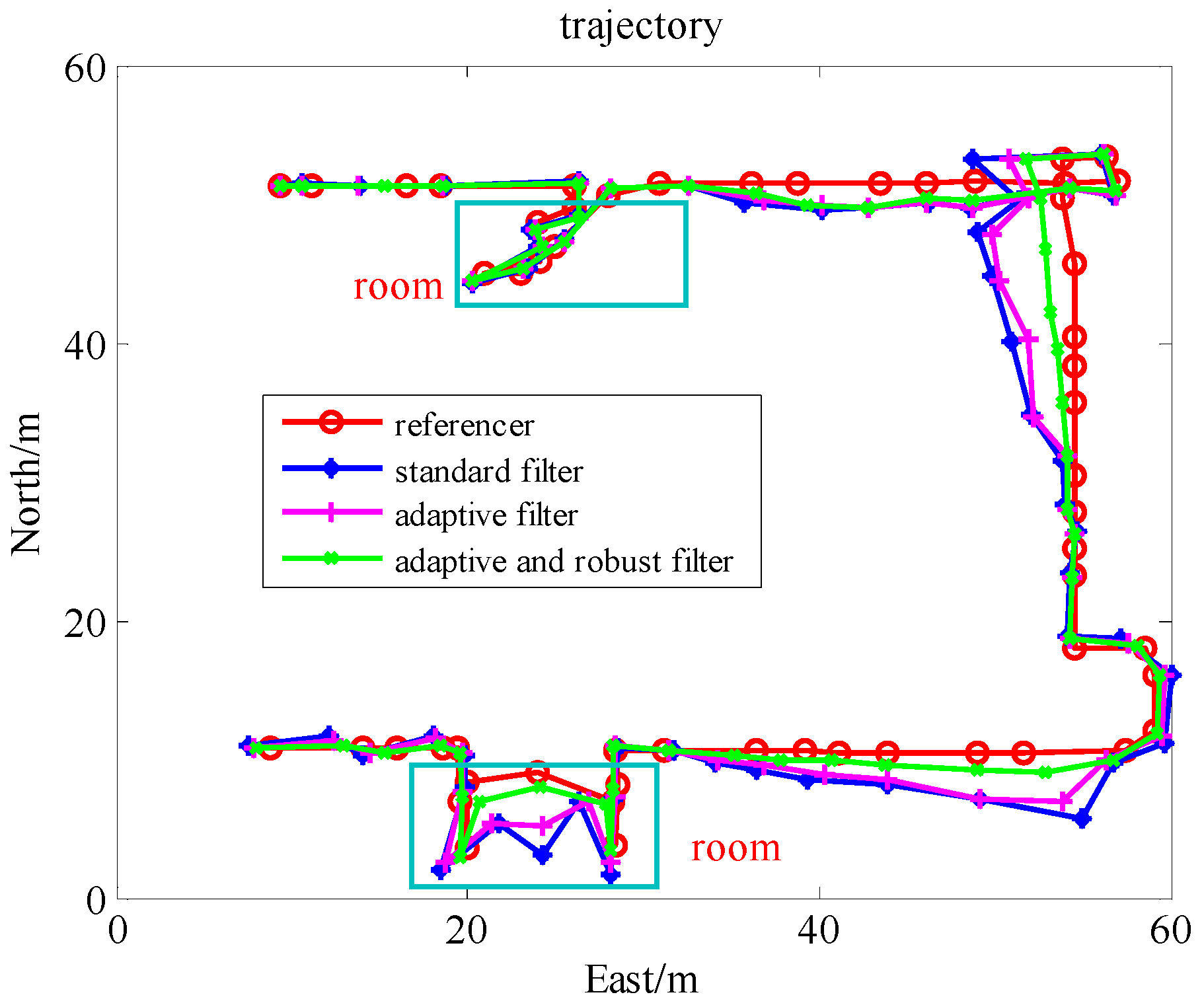
5. Experiment and Analysis
- Scheme 1: standard filter only;
- Scheme 2: adaptive filter based on scenario and motion state recognition;
- Scheme 3: adaptive and robust filter (method proposed in Section 4).
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fang, S.H.; Hsu, Y.T.; Kuo, W.H. Dynamic fingerprinting combination for improved mobile localization. IEEE Trans. Wirel. Commun. 2011, 10, 4018–4022. [Google Scholar] [CrossRef]
- Fang, S.H.; Lin, T.N. Robust wireless LAN location fingerprinting by SVD-based noise reduction. In Proceedings of the 3rd International Symposium on Communications, Control and Signal Processing, Julians, Malta, 12–14 March 2008.
- Atia, M.M.; Noureldin, A.; Korenberg, M.J. Bayesian machine learning in INS/WiFi integrated navigation systems for indoor and GNSS-denied environments. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011.
- Carvalho, F.; Santos, E.; Iabrudi, A.; Chaimowicz, L.; Campos, M.M. Indoor wireless sensor localization using mobile robot and RSSI. In Proceedings of the 2012 IEEE 9th International Conference on Mobile Ad-Hoc and Sensor Systems, Las Vegas, NV, USA, 8–11 October 2012.
- Ruiz, A.R.J.; Granja, F.S.; Honorato, J.C.P.; Rosas, J.I.G. Accurate pedestrian indoor navigation by tightly coupling foot-mounted IMU and RFID measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Hamel, W.R.; Tan, J. Accurate human navigation using wearable monocular visual and inertial sensors. IEEE Trans. Instrum. Meas. 2014, 63, 203–213. [Google Scholar] [CrossRef]
- Chen, L.H.; Wu, E.H.K.; Jin, M.H.; Chen, G.H. Intelligent fusion of Wi-Fi and inertial sensor-based positioning systems for indoor pedestrian navigation. IEEE Sens. J. 2014, 14, 4034–4042. [Google Scholar] [CrossRef]
- Masiero, A.; Guarnieri, A.; Pirotti, F.; Vettore, A. A particle filter for smartphone-based indoor pedestrian navigation. Micromachines 2014, 5, 1012–1033. [Google Scholar] [CrossRef]
- Atia, M.M.; Iqbal, U.; Givigi, S.; Noureldin, A.; Korenberg, M. Adaptive integrated indoor pedestrian tracking system using MEMS sensors and hybrid WiFi/Bluetooth-Beacons with optimized grid-based Bayesian filtering algorithm. In Proceedings of the 2015 International Technical Meeting of the Institute of Navigation (ION ITM 2015), Dana Point, CA, USA, 26–28 January 2015.
- Lamy-Perbal, S.; Gu, N.; Boukallel, M.; Landragin-Frassati, A. A HMM map-matching approach enhancing indoor positioning performances of an inertial measurement system. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015.
- Wilk, P.; Karciarz, J.; Swiatek, J. Indoor radio map maintenance by automatic annotation of crowdsourced Wi-Fi fingerprints. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015.
- Jiang, W.; Yin, Z. Indoor localization with a signal tree. In Proceedings of the 18th International Conference on Information Fusion (FUSION), Washington, DC, USA, 6–9 July 2015.
- Li, Y.; Zhuang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. WiFi-aided magnetic matching for indoor navigation with consumer portable devices. Micromachines 2015, 6, 747–764. [Google Scholar] [CrossRef]
- Li, T.; Georgy, J.; Syed, Z.; Goodall, C. Robust integrated indoor navigation using consumer device sensors, map matching and wireless positioning. In Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015.
- Zhuang, Y.; Li, Y.; Lan, H.; El-Sheimy, N. Design and evaluation of an improved integration of WiFi fingerprinting and MEMS sensors in smartphones. In Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015.
- Zhuang, Y.; El-Sheimy, N. Tightly-coupled integration of WiFi and MEMS sensors on handheld devices for indoor pedestrian navigation. IEEE Sens. J. 2016, 16, 224–234. [Google Scholar] [CrossRef]
- Hartmann, F.; Rifat, D.; Stork, W. Hybrid indoor pedestrian navigation combining an INS and a spatial non-uniform UWB-network. In Proceedings of the 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016.
- Canedo-Rodríguez, A.; Álvarez-Santos, V.; Regueiro, C.; Iglesias, R.; Barro, S.; Presedo, J. Particle filter robot localisation through robust fusion of laser, WiFi, compass, and a network of external cameras. Inf. Fusion. 2016, 27, 170–188. [Google Scholar] [CrossRef]
- Pittet, S.; Renaudin, V.; Merminod, B.; Kasser, M. UWB and MEMS based indoor navigation. J. Navig. 2008, 61, 369–384. [Google Scholar] [CrossRef]
- Yang, Y.; He, H.; Xu, G. Adaptively robust filtering for kinematic geodetic positioning. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Yang, Y.; Song, L.; Xu, T. Robust estimator for correlated observations based on bifactor equivalent weights. J. Geod. 2002, 76, 353–358. [Google Scholar] [CrossRef]
- Yang, Y.; Cui, X. Adaptively robust filter with multi adaptive factors. Surv. Rev. 2008, 40, 260–270. [Google Scholar] [CrossRef]
- Ali, J.; Ushaq, M. A consistent and robust Kalman filter design for in-motion alignment of inertial navigation system. Measurement 2009, 42, 577–582. [Google Scholar] [CrossRef]
- Gao, S.; Zhong, Y.; Li, W. Robust adaptive filtering method for SINS/SAR integrated navigation system. Aerosp. Sci. Technol. 2011, 15, 425–430. [Google Scholar] [CrossRef]
- Huang, G.; Zhang, Q. Real-time estimation of satellite clock offset using adaptively robust Kalman filter with classified adaptive factors. GPS Solut. 2012, 16, 531–539. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X. Adaptive robust Kalman filtering for precise point positioning. Meas. Sci. Technol. 2014, 25, 1–8. [Google Scholar] [CrossRef]
- Soken, H.E.; Hajiyev, C.; Sakai, S.I. Robust Kalman filtering for small satellite attitude estimation in the presence of measurement faults. Eur. J. Control. 2014, 20, 64–72. [Google Scholar] [CrossRef]
- Chang, G. Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion. J. Geod. 2014, 88, 391–401. [Google Scholar] [CrossRef]
- Pei, L.; Chen, R.; Liu, J.; Kuusniemi, H.; Tenhunen, T.; Chen, Y. Using inquiry-based Bluetooth RSSI probability distributions for indoor positioning. J. Glob. Position. Syst. 2010, 9, 122–130. [Google Scholar]
- Chen, W.; Chen, R.; Chen, X.; Zhang, X.; Chen, Y.; Wang, J.; Fu, Z. Comparison of EMG-based and accelerometer-based speed estimation methods in pedestrian dead reckoning. J. Navig. 2011, 64, 265–280. [Google Scholar] [CrossRef]
- Shin, S.H.; Park, C.G. Adaptive step length estimation algorithm using optimal parameters and movement status awareness. Med. Eng. Phys. 2011, 33, 1064–1071. [Google Scholar] [CrossRef] [PubMed]
- Levi, R.W.; Judd, T. Dead Reckoning Navigational System Using Accelerometer to Measure Foot Impacts. U.S. Patent US5583776 A, 10 December 1996. [Google Scholar]
- Li, X.; Wang, J.; Liu, C.; Zhang, L.; Li, Z. Integrated WiFi/PDR/Smartphone using an adaptive system noise extended Kalman filter algorithm for indoor localization. ISPRS Int. J. Geo-Inf. 2016. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Gao, J. An enhanced GPS/INS integrated navigation system with GPS observation expansion. J. Navig. 2016, 69, 1041–1060. [Google Scholar] [CrossRef]
- Chang, G. Kalman filter with both adaptivity and robustness. J. Process Control 2014, 24, 81–87. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | East (m) | North (m) | Plane (m) |
|---|---|---|---|
| Standard filter | 3.027 | 1.642 | 3.444 |
| Adaptive filter | 2.923 | 1.526 | 3.297 |
| Adaptive and robust filter | 2.197 | 1.406 | 2.608 |
| Scheme | Point 1 (m) | Point 2 (m) | Point 3 (m) | Point 4 (m) |
|---|---|---|---|---|
| Standard filter | 8.712 | 3.561 | 5.856 | 5.977 |
| Adaptive filter | 7.612 | 3.162 | 5.385 | 5.153 |
| Adaptive and robust filter | 2.756 | 1.983 | 2.295 | 1.932 |
| Scheme | East (m) | North (m) | Plane (m) |
|---|---|---|---|
| Standard filter | 2.451 | 2.321 | 3.376 |
| Adaptive filter | 1.986 | 1.940 | 2.776 |
| Adaptive and robust filter | 1.002 | 1.069 | 1.465 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Liu, C.; Gao, J.; Li, X. An Improved WiFi/PDR Integrated System Using an Adaptive and Robust Filter for Indoor Localization. ISPRS Int. J. Geo-Inf. 2016, 5, 224. https://doi.org/10.3390/ijgi5120224
Li Z, Liu C, Gao J, Li X. An Improved WiFi/PDR Integrated System Using an Adaptive and Robust Filter for Indoor Localization. ISPRS International Journal of Geo-Information. 2016; 5(12):224. https://doi.org/10.3390/ijgi5120224
Chicago/Turabian StyleLi, Zengke, Chunyan Liu, Jingxiang Gao, and Xin Li. 2016. "An Improved WiFi/PDR Integrated System Using an Adaptive and Robust Filter for Indoor Localization" ISPRS International Journal of Geo-Information 5, no. 12: 224. https://doi.org/10.3390/ijgi5120224
APA StyleLi, Z., Liu, C., Gao, J., & Li, X. (2016). An Improved WiFi/PDR Integrated System Using an Adaptive and Robust Filter for Indoor Localization. ISPRS International Journal of Geo-Information, 5(12), 224. https://doi.org/10.3390/ijgi5120224