An Automatic Recognition and Positioning Method for Point Source Targets on Satellite Images


Abstract
:1. Introduction
2. Materials and Methods
2.1. Initial Positioning of Point Source Target Image
2.2. Point Source Target Image Recognition
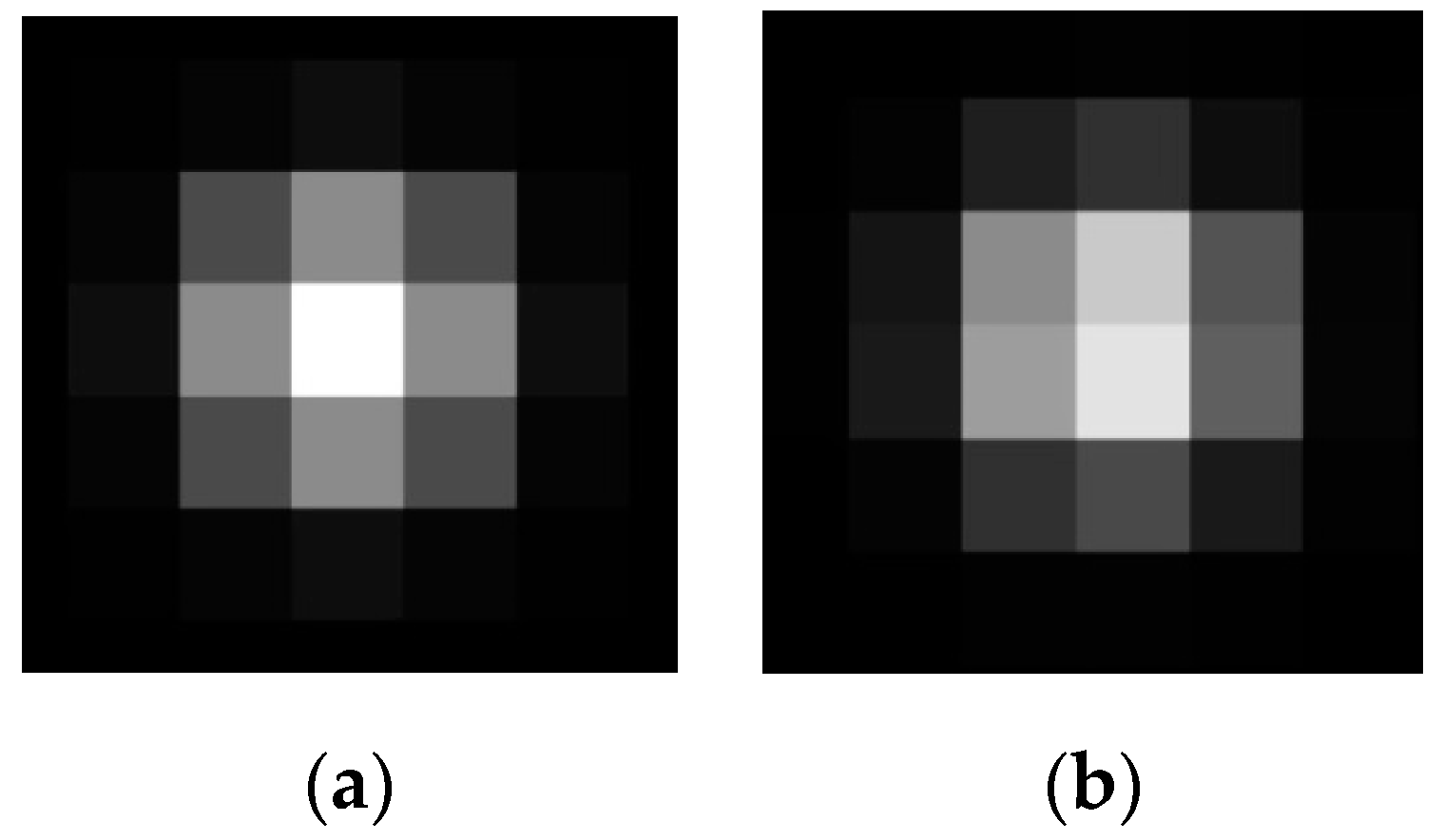
2.2.1. Characteristics of Point Source Target Image
2.2.2. Pre-Recognition of Point Source Target Image
2.2.3. Mismatch Elimination
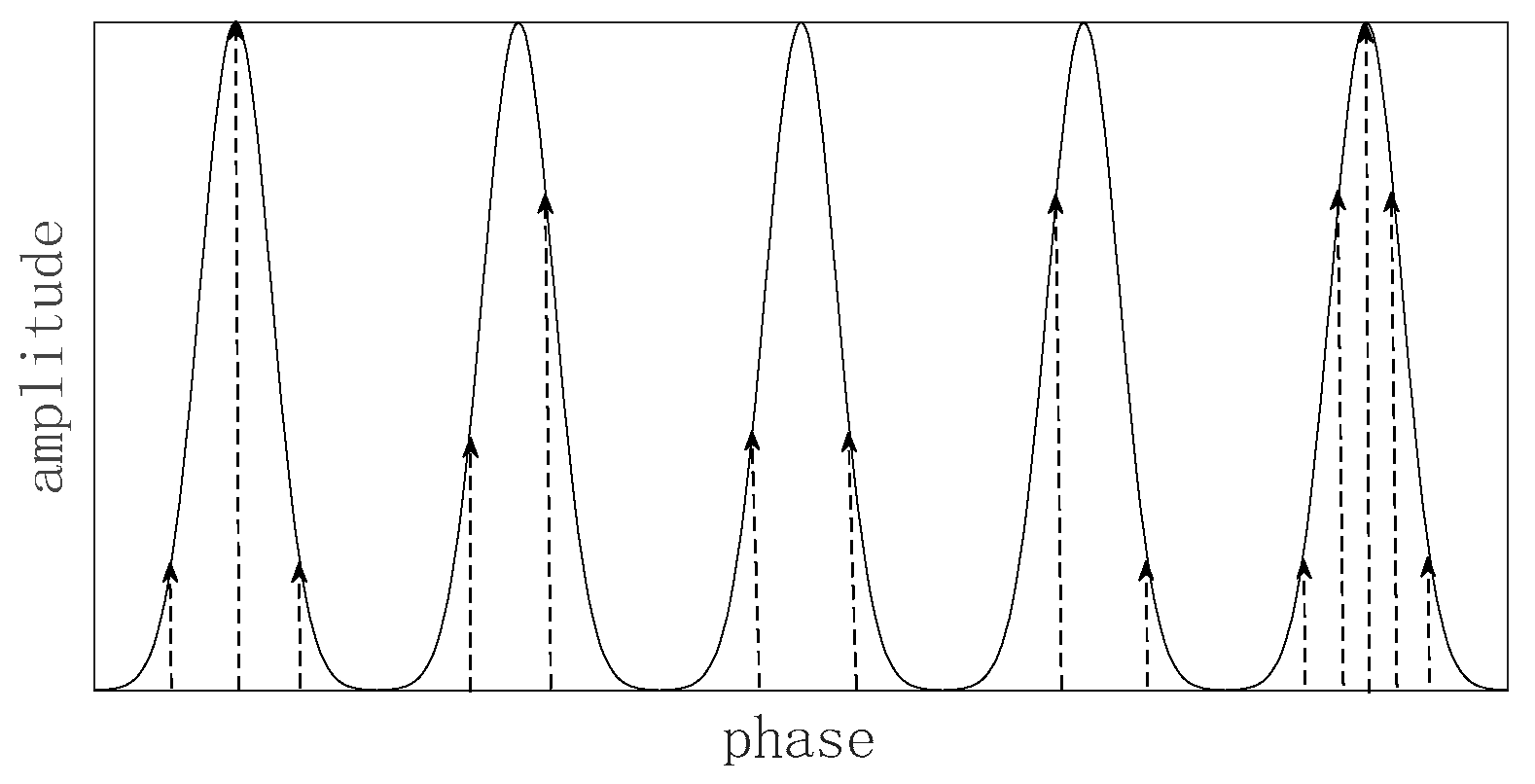
2.3. Subpixel Positioning of Point Source Target Image
3. Results
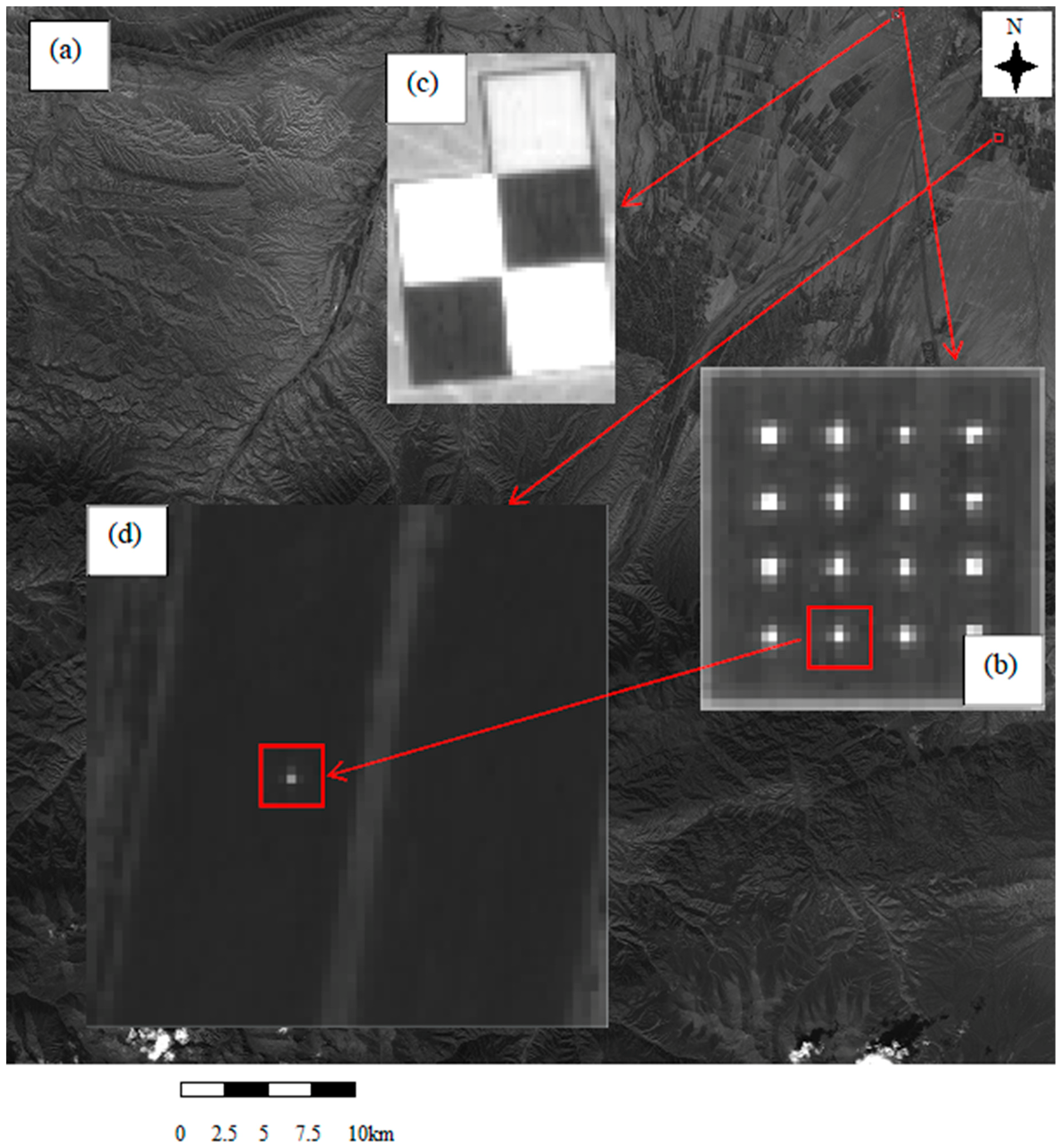
3.1. Experimental Data
3.2. Pre-Recognition Experiment Results
3.3. Elimination of False Matches
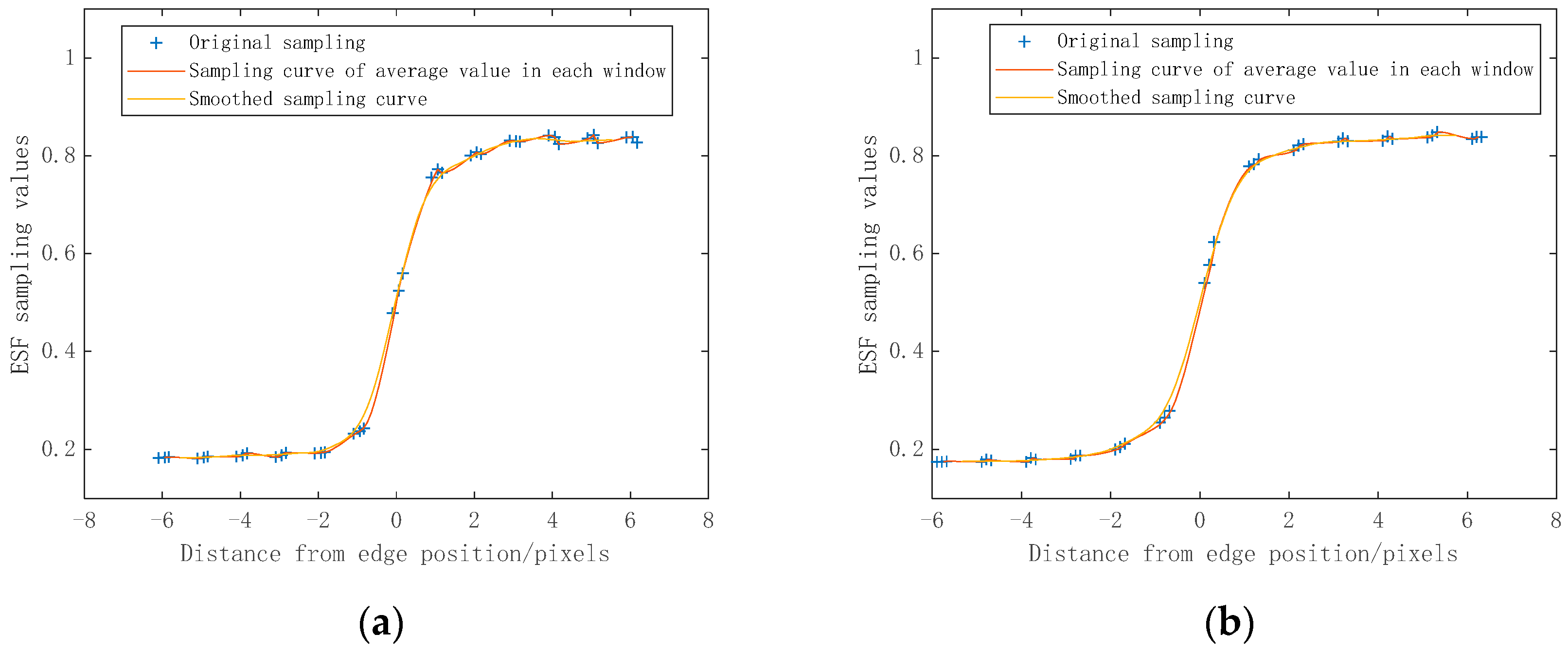
3.4. Subpixel Positioning Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Belward, A.S.; Skøien, J.O. Who launched what, when and why; trends in global land-cover observation capacity from civilian earth observation satellites. ISPRS J. Photogramm. 2015, 103, 115–128. [Google Scholar] [CrossRef]
- Dowman, I.; Reuter, H.I. Global geospatial data from Earth observation: Status and issues. Int. J. Digit. Earth 2017, 10, 328–341. [Google Scholar] [CrossRef]
- Wang, J.; Wang, R.; Hu, X.; Su, Z. The on-orbit calibration of geometric parameters of the Tian-Hui 1 (TH-1) satellite. ISPRS J. Photogramm. 2017, 124, 144–151. [Google Scholar] [CrossRef]
- Poli, D.; Remondino, F.; Angiuli, E.; Agugiaro, G. Radiometric and geometric evaluation of GeoEye-1, WorldView-2 and Pléiades-1A stereo images for 3D information extraction. ISPRS J. Photogramm. 2015, 100, 35–47. [Google Scholar] [CrossRef]
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A calibration and products validation status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef]
- Montanaro, M.; Lunsford, A.; Tesfaye, Z.; Wenny, B.; Reuter, D. Radiometric calibration methodology of the Landsat 8 thermal infrared sensor. Remote Sens. 2014, 6, 8803–8821. [Google Scholar] [CrossRef]
- Guanter, L.; Kaufmann, H.; Segl, K.; Foerster, S.; Rogass, C.; Chabrillat, S.; Kuester, T.; Hollstein, A.; Rossner, G.; Chlebek, C.; et al. The EnMAP spaceborne imaging spectroscopy mission for earth observation. Remote Sens. 2015, 7, 8830–8857. [Google Scholar] [CrossRef] [Green Version]
- Storey, J.; Choate, M.; Lee, K. Landsat 8 Operational Land Imager on-orbit geometric calibration and performance. Remote Sens. 2014, 6, 1127–11152. [Google Scholar] [CrossRef]
- Takaku, J.; Tadono, T. PRISM on-orbit geometric calibration and DSM performance. IEEE Trans. Geosci. Remote 2009, 47, 4060–4073. [Google Scholar] [CrossRef]
- Radhadevi, P.V.; Solanki, S.S. In-flight geometric calibration of different cameras of IRS-P6 using a physical sensor model. Photogramm. Rec. 2008, 23, 69–89. [Google Scholar] [CrossRef]
- Jiang, Y.; Xu, K.; Zhao, R.; Zhang, G.; Cheng, K.; Zhou, P. Stitching images of dual-cameras onboard satellite. ISPRS J. Photogramm. 2017, 128, 274–286. [Google Scholar] [CrossRef]
- Yang, B.; Wang, M.; Xu, W.; Li, D.; Gong, J.; Pi, Y. Large-scale block adjustment without use of ground control points based on the compensation of geometric calibration for ZY-3 images. ISPRS J. Photogramm. 2017, 134, 1–14. [Google Scholar] [CrossRef]
- Mulawa, D. On-orbit geometric calibration of the OrbView-3 high resolution imaging satellite. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 1–6. [Google Scholar]
- Leprince, S.; Barbot, S.; Ayoub, F.; Avouac, J.P. Automatic and precise orthorectificartion, coregistration, and subpixel correlation of satellite images, application to ground deformation measurements. IEEE Trans. Geosci. Remote 2007, 45, 1529–1558. [Google Scholar] [CrossRef]
- Jiang, Y.H.; Zhang, G.; Tang, X.M.; Li, D.; Huang, W.C.; Pan, H.B. Geometric calibration and accuracy assessment of ZiYuan-3 multispectral images. IEEE Trans. Geosci. Remote 2014, 52, 4161–4172. [Google Scholar] [CrossRef]
- Si, X.L.; Zhang, L.M.; Fu, X.K.; Zhu, X.Y.; Li, X.; Dou, X.H.; Yang, B.Y.; Wang, B.Y. Research of Satellite On-Orbit Geometric Calibration Method Based on Artificial Signs. J. Atmos. Environ. Opt. 2014, 9, 149–158. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, M.; Xiong, J.; Lu, Y.; Xiong, X. On-orbit geometric calibration of ZY-3 three-line array imagery with multistrip data sets. IEEE Trans. Geosci. Remote 2014, 52, 224–234. [Google Scholar] [CrossRef]
- Cao, J.; Yuan, X.; Gong, J. In-orbit geometric calibration and validation of ZY-3 three-line cameras based on CCD-detector look angles. Photogramm. Rec. 2015, 30, 211–226. [Google Scholar] [CrossRef]
- Zhou, G.; Li, R. Accuracy evaluation of ground points from IKONOS high-resolution satellite imagery. Photogramm. Eng. Remote Sens. 2000, 66, 1103–1112. [Google Scholar]
- Tang, X.; Zhang, G.; Zhu, X.; Pan, H.; Jiang, Y.; Zhou, P.; Wang, X. Triple linear-array image geometry model of ZiYuan-3 surveying satellite and its validation. Int. J. Image Data Fusion 2013, 4, 33–51. [Google Scholar] [CrossRef]
- Chander, G.; Helder, D.L.; Markham, B.L.; Dewald, J.D.; Kaita, E.; Thome, K.J.; Micijevic, E.; Ruggles, T.A. Landsat-5 TM reflective-band absolute radiometric calibration. IEEE Trans. Geosci. Remote 2004, 42, 2747–2760. [Google Scholar] [CrossRef]
- Yoshida, M.; Murakami, H.; Mitomi, Y.; Hori, M.; Thome, K.J.; Clark, D.K.; Fukushima, H. Vicarious calibration of GLI by ground observation data. IEEE Trans. Geosci. Remote 2005, 43, 2167–2176. [Google Scholar] [CrossRef]
- Gao, H.L.; Gu, X.F.; Yu, T.; Gong, H.; Li, J.G.; Li, X.Y. HJ-1A HSI on-orbit radiometric calibration and validation research. Sci. China Technol. Sci. 2010, 53, 3119–3128. [Google Scholar] [CrossRef]
- Barsi, J.A.; Schott, J.R.; Hook, S.J.; Raqueno, N.G.; Markham, B.L.; Radocinski, R.G. Landsat-8 thermal infrared sensor (TIRS) vicarious radiometric calibration. Remote Sens. 2014, 6, 11607–11626. [Google Scholar] [CrossRef]
- Czapla-Myers, J.; McCorkel, J.; Anderson, N.; Thome, K.; Biggar, S.; Helder, D.; Aaron, D.; Leigh, L.; Mishra, N. The ground-based absolute radiometric calibration of Landsat 8 OLI. Remote Sens. 2015, 7, 600–626. [Google Scholar] [CrossRef]
- Czapla-Myers, J.; Ong, L.; Thome, K.; McCorkel, J. Validation of EO-1 Hyperion and Advanced Land Imager Using the Radiometric Calibration Test Site at Railroad Valley, Nevada. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 816–826. [Google Scholar] [CrossRef]
- Schiller, S.J.; Silny, J. The SPecular Array Radiometric Calibration (SPARC) method: A new approach for absolute vicarious calibration in the solar reflective spectrum. In Proceedings of the Remote Sensing System Engineering III, 78130E, San Diego, CA, USA, 26 August 2010; Volume 7813. [Google Scholar]
- Xu, W.W.; Zhang, L.M.; Chen, H.Y.; Li, X.; Yang, B.Y.; Wang, J.X. In-Flight Radiometric Calibration of High Resolution Optical Satellite Sensor Using Reflected Point Sources. Acta Opt. Sin. 2017, 37, 340–347. [Google Scholar] [CrossRef]
- Rauchmiller, R.F.; Schowengerdt, R.A. Measurement of the Landsat Thematic Mapper modulation transfer function using an array of point sources. Opt. Eng. 1988, 27, 274334. [Google Scholar] [CrossRef]
- Robinet, F.; Leger, D.; Cerbelaud, H.; Lafont, S. Obtaining the MTF of a CCD imaging system using an array of point sources: Evaluation of performances. In Proceedings of the IGARSS ’91 Remote Sensing: Global Monitoring for Earth Management, Espoo, Finland, 3–6 June 1991; pp. 1357–1361. [Google Scholar]
- Leger, D.; Duffaut, J.; Robinet, F. MTF measurement using spotlight. In Proceedings of the IGARSS ’94—1994 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 8–12 August 1994; pp. 2010–2012. [Google Scholar]
- Rangaswamy, M.K. Quickbird II: Two-Dimensional On-Orbit Modulation Transfer Function Analysis Using Convex Mirror Array. Ph.D. Thesis, Electrical Engineering Department, South Dakota State University, Brookings, SD, USA, 2003. [Google Scholar]
- Xue, F.; Blu, T. A novel SURE-based criterion for parametric PSF estimation. IEEE Trans. Image Process. 2015, 24, 595–607. [Google Scholar] [CrossRef] [PubMed]
- Otsuzumi, K.; Ishihara, Y. PSF Estimation for Restoration of Zoom-Blurred Endoscope Images. J. Signal Process. 2016, 20, 213–216. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.; Townshend, J.R.; Liang, S.; Kalluri, S.N.; DeFries, R.S. Impact of sensor’s point spread function on land cover characterization: Assessment and deconvolution. Remote Sens. Environ. 2002, 80, 203–212. [Google Scholar] [CrossRef]
- Storey, J.C. Landsat 7 on-orbit modulation transfer function estimation. In Proceedings of the Sensors, Systems, and Next-Generation Satellites V, Toulouse, France, 12 December 2001; Volume 4540. [Google Scholar]
- Yang, L.; Ren, J. Remote sensing image restoration using estimated point spread function. In Proceedings of the 2010 International Conference on Information, Networking and Automation (ICINA), Kunming, China, 18–19 October 2010; pp. 41–48. [Google Scholar]
- Fan, C.; Li, G.D.; Wu, C.Y.; Li, C.; Zhong, L. High Accurate Estimation of Point Spread Function Based on Improved Reconstruction of Slant Edge. Acta Geod. Cartogr. Sin. 2015, 44, 1219–1226. [Google Scholar] [CrossRef]
- Gao, H.T.; Liu, W.; He, H.Y.; Wu, M. Static PSF of TDI-CCD Measurement with multi-phase-knife Method. Opto-Electron. Eng. 2016, 43, 13–18. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. 1986, 6, 679–698. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Maximum | Minimum | Average Value |
|---|---|---|---|
| Point source image | 0.93 | 0.81 | 0.86 |
| Nonpoint source image | 0.87 | 0.80 | 0.83 |
| Error Type | Error Rate | |||||
|---|---|---|---|---|---|---|
| , | ||||||
| I | 0 | 0 | 0 | 0 | 0 | 0 |
| II | 13.9% | 16.7% | 0 | 0 | 0 | 13.9% |
| III | 9.6% | 11.5% | 0 | 0 | 0 | 9.6% |
| I | II | III | I | II | III | I | II | III | I | II | III |
|---|---|---|---|---|---|---|---|---|---|---|---|
| M1 | M2 | M3 | M4 | ||||||||
| 9.29 | 9.25 | 9.30 | 17.72 | 17.79 | 17.67 | 25.48 | 25.46 | 25.46 | 34.00 | 33.99 | 33.98 |
| 19.60 | 19.62 | 19.59 | 19.64 | 19.66 | 19.62 | 19.74 | 19.77 | 19.72 | 19.80 | 19.83 | 19.75 |
| M5 | M6 | M7 | M8 | ||||||||
| 9.37 | 9.35 | 9.38 | 17.25 | 17.23 | 17.28 | 25.71 | 25.78 | 25.68 | 33.90 | 33.95 | 33.85 |
| 27.96 | 27.97 | 27.91 | 28.00 | 27.99 | 27.97 | 28.01 | 27.99 | 27.98 | 28.03 | 28.00 | 28.02 |
| M9 | M10 | M11 | M12 | ||||||||
| 9.17 | 9.10 | 9.25 | 17.49 | 17.58 | 17.56 | 25.82 | 25.86 | 25.76 | 33.89 | 33.94 | 33.86 |
| 36.07 | 36.01 | 36.07 | 36.07 | 36.01 | 36.09 | 36.08 | 36.02 | 36.11 | 36.11 | 36.04 | 36.14 |
| M13 | M14 | M15 | M16 | ||||||||
| 9.10 | 9.05 | 9.17 | 17.18 | 17.12 | 17.24 | 25.60 | 25.64 | 25.61 | 33.63 | 33.67 | 33.61 |
| 44.22 | 44.16 | 44.26 | 44.35 | 44.27 | 44.35 | 44.33 | 44.27 | 44.33 | 44.40 | 44.36 | 44.39 |
| I | II | III | I | II | III | I | II | III | I | II | III |
|---|---|---|---|---|---|---|---|---|---|---|---|
| M1 | M2 | M3 | M4 | ||||||||
| 0.01 | −0.03 | 0.02 | 0 | 0.01 | −0.03 | 0.02 | 0 | 0.01 | −0.03 | 0.02 | 0 |
| −0.003 | 0.017 | −0.013 | 0 | −0.003 | 0.017 | −0.013 | 0 | −0.003 | 0.017 | −0.013 | 0 |
| M5 | M6 | M7 | M8 | ||||||||
| 0.003 | −0.017 | 0.013 | −0.003 | 0.003 | −0.017 | 0.013 | −0.003 | 0.003 | −0.017 | 0.013 | −0.003 |
| 0.013 | 0.023 | −0.036 | 0.014 | 0.013 | 0.023 | −0.036 | 0.014 | 0.013 | 0.023 | −0.036 | 0.014 |
| M9 | M10 | M11 | M12 | ||||||||
| −0.003 | −0.073 | 0.077 | −0.053 | −0.003 | −0.073 | 0.077 | −0.053 | −0.003 | −0.073 | 0.077 | −0.053 |
| 0.02 | −0.04 | 0.02 | 0.013 | 0.02 | −0.04 | 0.02 | 0.013 | 0.02 | −0.04 | 0.02 | 0.013 |
| M13 | M14 | M15 | M16 | ||||||||
| 0.027 | −0.023 | −0.003 | 0 | 0.027 | −0.023 | −0.003 | 0 | 0.027 | −0.023 | −0.003 | 0 |
| 0.007 | −0.053 | 0.047 | 0.027 | 0.007 | −0.053 | 0.047 | 0.027 | 0.007 | −0.053 | 0.047 | 0.027 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, K.; Zhang, Y.; Zhang, Z.; Yu, Y. An Automatic Recognition and Positioning Method for Point Source Targets on Satellite Images. ISPRS Int. J. Geo-Inf. 2018, 7, 434. https://doi.org/10.3390/ijgi7110434
Li K, Zhang Y, Zhang Z, Yu Y. An Automatic Recognition and Positioning Method for Point Source Targets on Satellite Images. ISPRS International Journal of Geo-Information. 2018; 7(11):434. https://doi.org/10.3390/ijgi7110434
Chicago/Turabian StyleLi, Kai, Yongsheng Zhang, Zhenchao Zhang, and Ying Yu. 2018. "An Automatic Recognition and Positioning Method for Point Source Targets on Satellite Images" ISPRS International Journal of Geo-Information 7, no. 11: 434. https://doi.org/10.3390/ijgi7110434
APA StyleLi, K., Zhang, Y., Zhang, Z., & Yu, Y. (2018). An Automatic Recognition and Positioning Method for Point Source Targets on Satellite Images. ISPRS International Journal of Geo-Information, 7(11), 434. https://doi.org/10.3390/ijgi7110434