Identification and Mapping of Soil Erosion Processes Using the Visual Interpretation of LiDAR Imagery


Abstract
:
1. Introduction
2. Materials
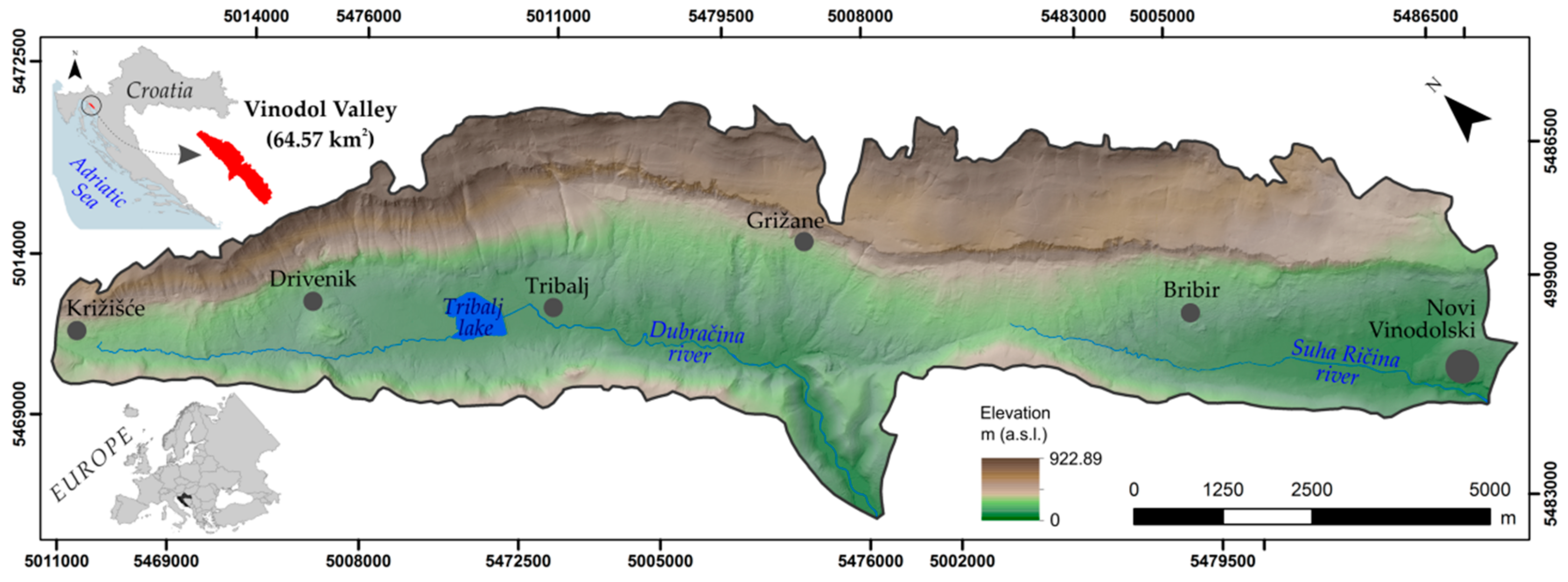
2.1. Study Area
2.2. High Resolution LiDAR data
2.3. Other Topographic and Lithologic Data
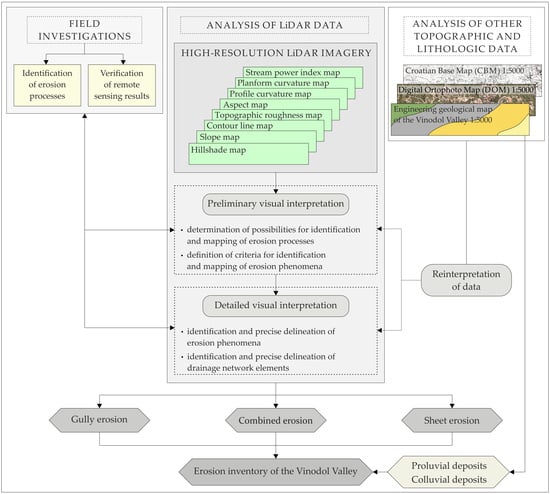
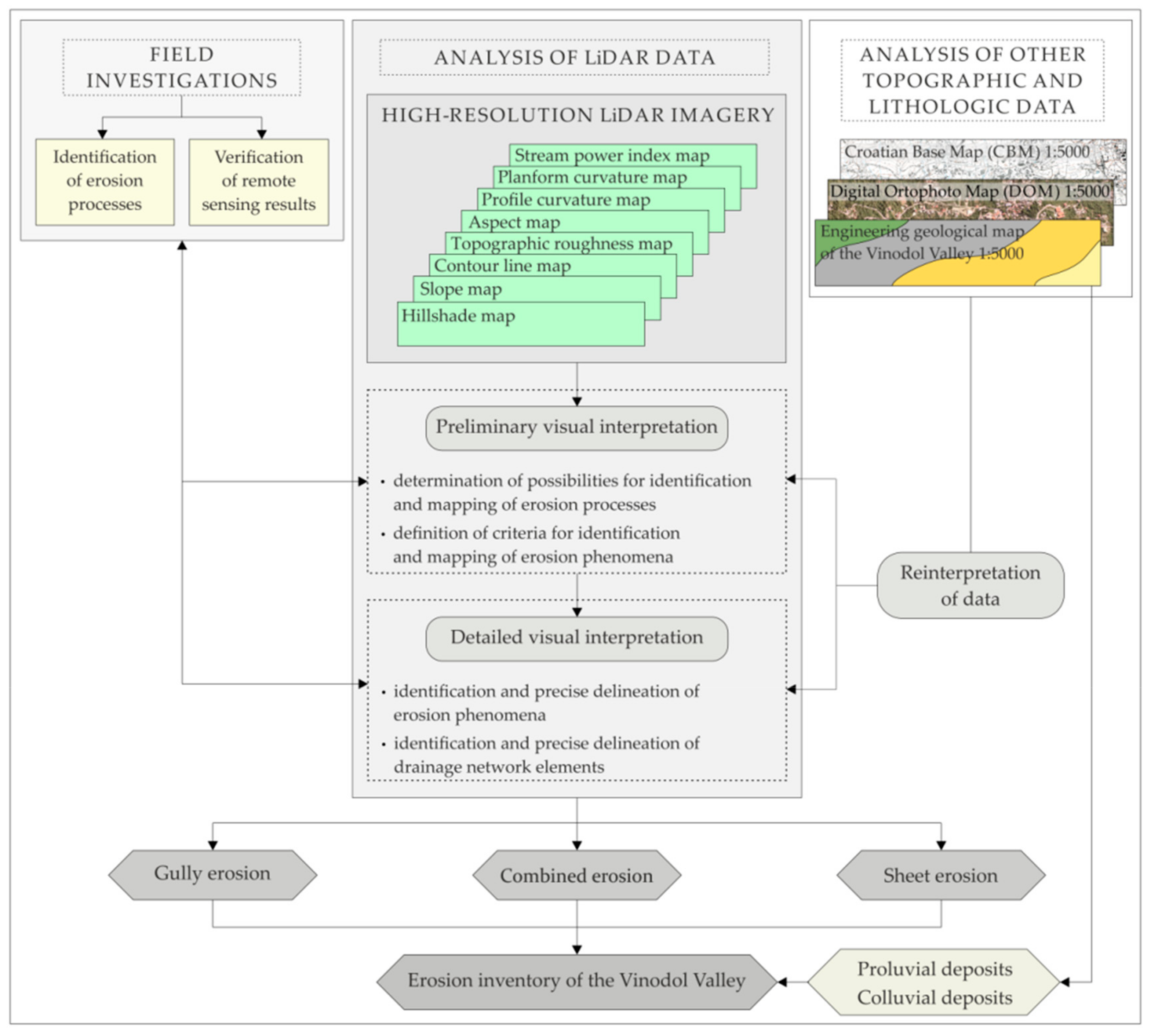
3. Methodology for Preparation of Erosion Inventory
3.1. Preliminary Visual Interpretation of HR LiDAR Imagery
3.2. Criteria for Identification and Mapping of Erosion Phenomena
3.3. Detailed Visual Interpretation of HR LiDAR Imagery
4. Results of Detailed Visual Interpretation of HR LiDAR Imagery
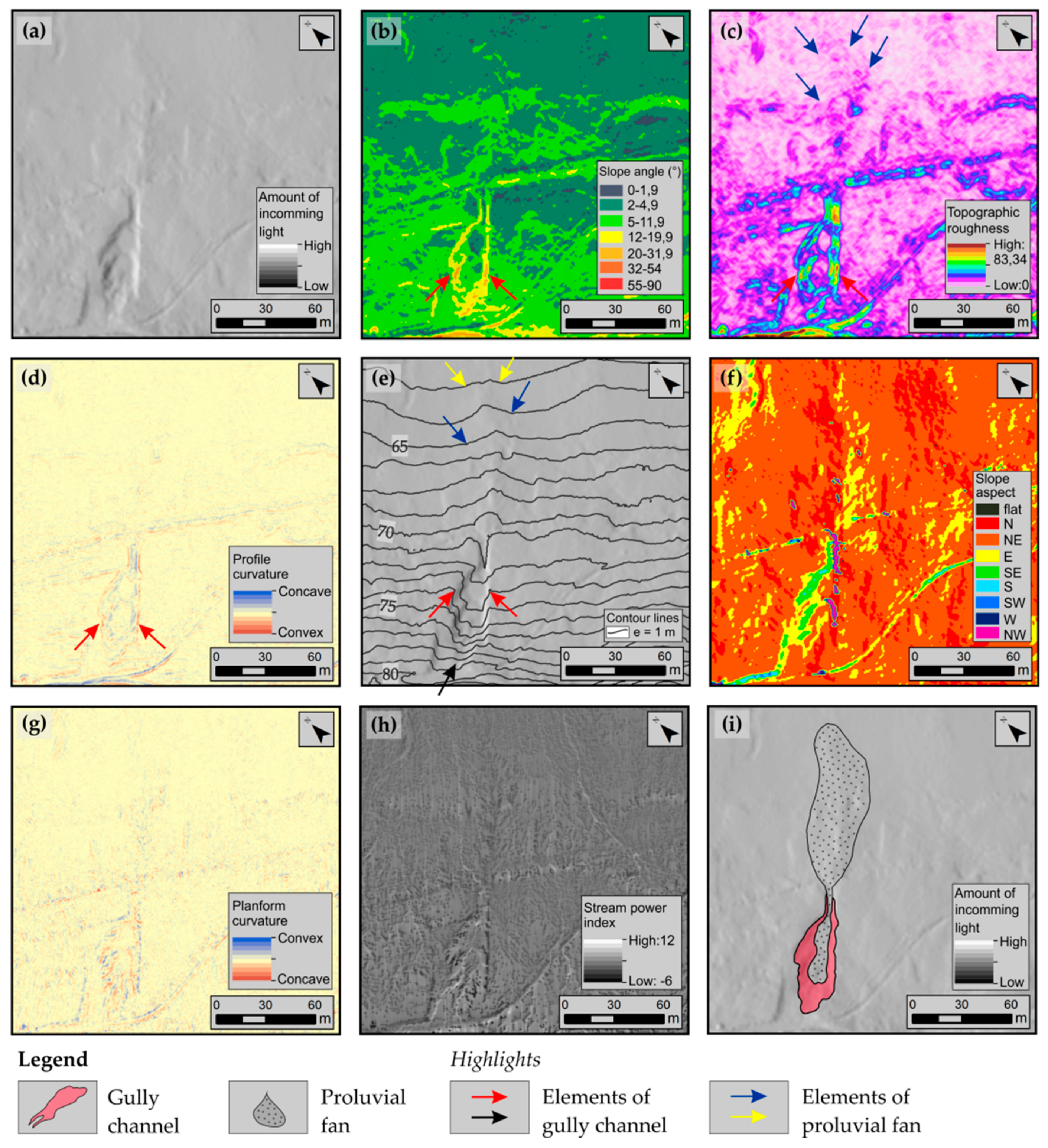
4.1. Identification and Mapping of Gully Erosion Phenomena
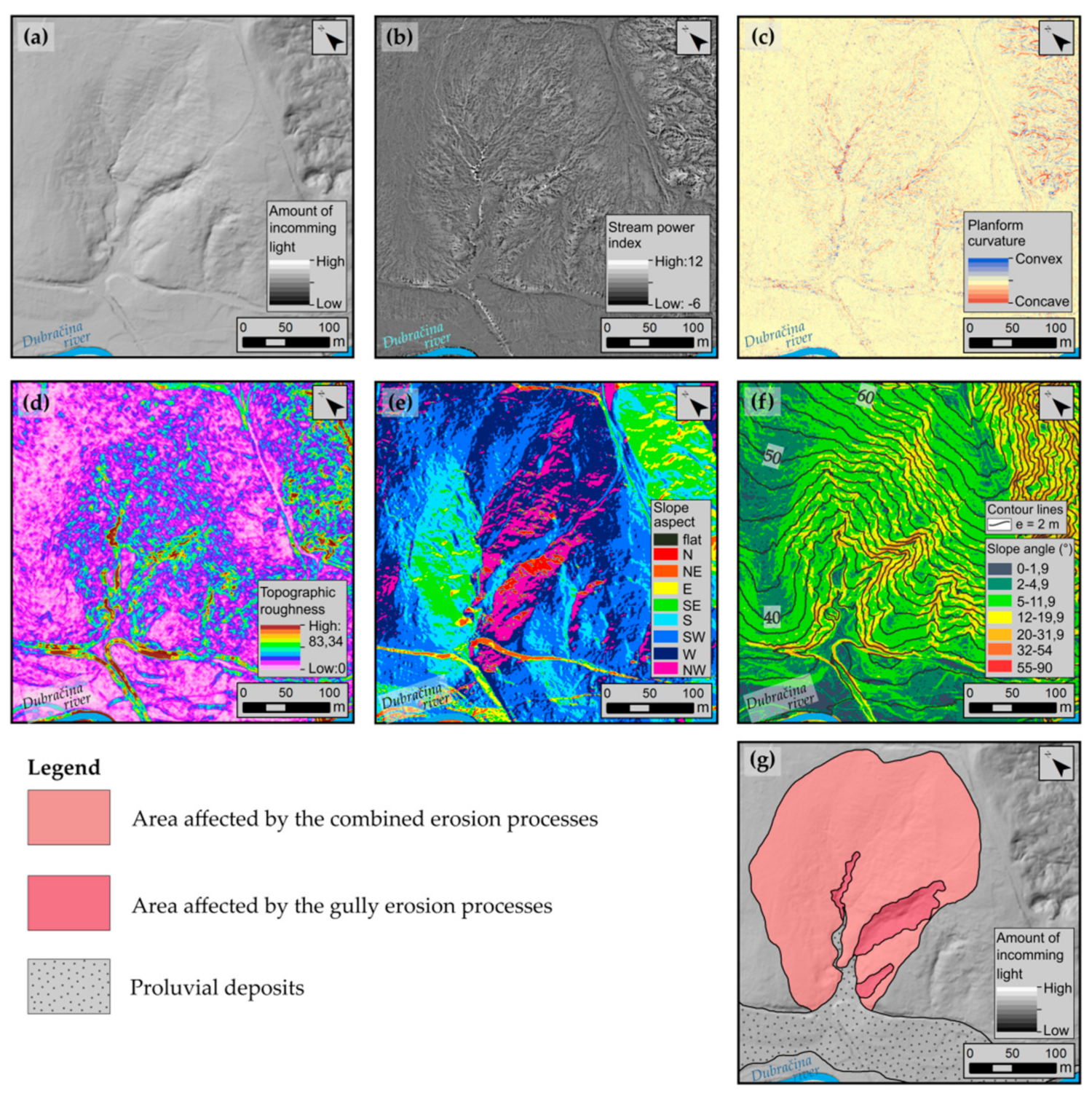
4.2. Identification and Mapping of Combined Erosion Phenomena
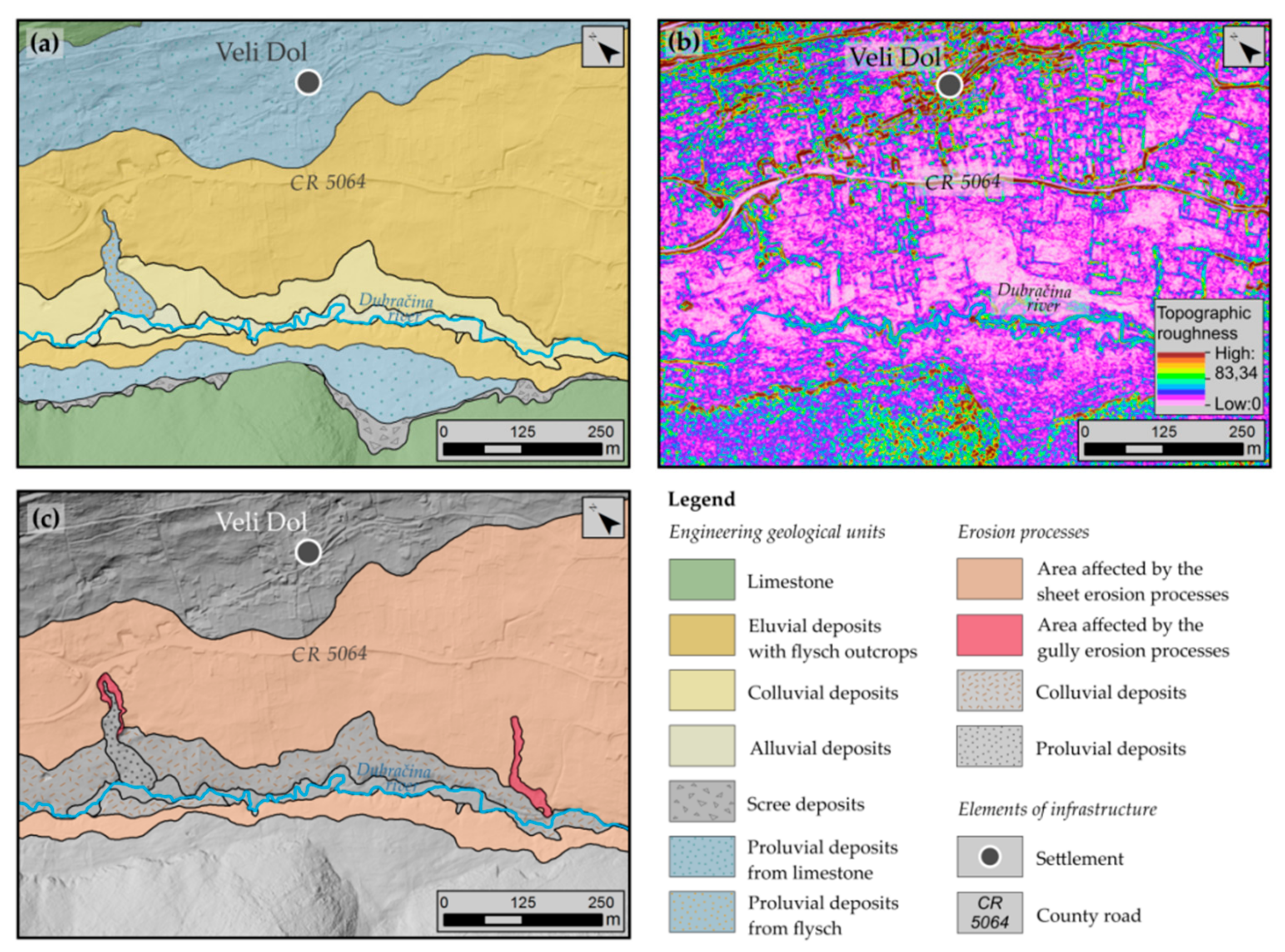
4.3. Identification and Mapping of Sheet Erosion Phenomena
4.4. Erosion Inventory Map of Vinodol Valley
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Valentin, C.; Poesen, J.; Yong, L. Gully erosion: Impacts, factors and control. Catena 2005, 63, 132–153. [Google Scholar] [CrossRef]
- Selby, M.J. Hillslope Materials and Processes, 2nd ed.; Oxford University Press: New York, NY, USA, 1993; pp. 231–242. [Google Scholar]
- Conforti, M.; Aucelli, P.P.C.; Robustelli, G.; Scarciglia, F. Geomorphology and GIS analysis for mapping gully erosion susceptibility in the Turbolo stream catchment (Northern Calabria, Italy). Nat. Hazards 2011, 56, 881–898. [Google Scholar] [CrossRef]
- Soms, J. Development and morphology of gullies in the river Daugava Valley, South-Eastern Latvia. Landf. Anal. 2011, 17, 183–192. [Google Scholar]
- Martínez-Casasnovas, J.A.; Antón-Fernández, C.; Ramos, M.C. Sediment production in large gullies of the Mediterranean area (NE Spain) from high-resolution digital elevation models and geographical information systems analysis. Earth Surf. Process. Landf. 2003, 28, 443–456. [Google Scholar] [CrossRef]
- Kirkby, M.J.; Bull, L.J.; Poesen, J.; Nachtergaele, J.; Vandekerckhove, L. Observed and modelled distributions of channel and gully heads—With examples from SE Spain and Belgium. Catena 2003, 50, 415–434. [Google Scholar] [CrossRef]
- Kakembo, V.; Xanga, W.W.; Rowntree, K. Topographic thresholds in gully development on the hillslopes of communal areas in Ngqushwa Local Municipality, Eastern Cape, South Africa. Geomorphology 2009, 110, 188–194. [Google Scholar] [CrossRef]
- Rahmati, O.; Haghizadeh, A.; Pourghasemi, H.R.; Noormohamadi, F. Gully erosion susceptibility mapping: The role of GIS-based bivariate statistical models and their comparison. Nat. Hazards 2016, 82, 1231–1258. [Google Scholar] [CrossRef]
- Bell, F.G. Geological Hazards: Their Assessment, Avoidance and Mitigation, 1st ed.; CRC Press, Taylor & Francis Group; Taylor & Francis Group: London, UK; New York, NY, USA, 1999. [Google Scholar]
- Joyce, K.E.; Samsonov, S.V.; Levick, S.R.; Engelbrecht, J.; Belliss, S. Mapping and monitoring geological hazards using optical, LiDAR, and synthetic aperture RADAR image data. Nat. Hazards 2014, 73, 137–163. [Google Scholar] [CrossRef]
- Evans, M.; Lindsay, J. High resolution quantification of gully erosion in upland peatlands at the landscape scale. Earth Surf. Process. Landf. 2010, 35, 876–886. [Google Scholar] [CrossRef]
- Conoscenti, C.; Angileri, S.; Cappadonia, C.; Rotigliano, E.; Agnesi, V.; Märker, M. Gully erosion susceptibility assessment by means of GIS-based logistic regression: A case of Sicily (Italy). Geomorphology 2014, 204, 399–411. [Google Scholar] [CrossRef] [Green Version]
- Van Westen, C.J.; van Asch, T.W.J.; Soeters, R. Landslide hazard and risk zonation—Why is it still so difficult? Bull. Eng. Geol. Environ. 2005, 65, 167–184. [Google Scholar] [CrossRef]
- Guzzetti, F.; Mondini, A.C.; Cardinali, M.; Fiorucci, F.; Santangelo, M.; Chang, K.T. Landslide inventory maps: New tools for an old problem. Earth-Sci. Rev. 2012, 112, 42–66. [Google Scholar] [CrossRef] [Green Version]
- Scaioni, M.; Longoni, L.; Melillo, V.; Papini, M. Remote Sensing for Landslide Investigations: An Overview of Recent Achievements and Perspectives. Remote Sens. 2014, 6, 9600–9652. [Google Scholar] [CrossRef] [Green Version]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Haugerud, R.A.; Harding, D.J.; Johnson, S.Y.; Harless., J.L.; Weaver, C.S.; Sherrod, B.L. High-resolution lidar topography of the Puget Lowland, Washington—A bonanza for earth science. GSA Today 2003, 13, 4–10. [Google Scholar] [CrossRef]
- Chigira, M.; Duan, F.; Yagi, H.; Furuya, T. Using an airborne laser scanner for the identification of shallow landslides and susceptibility assessment in an area of ignimbrite overlain by permeable pyroclastics. Landslides 2004, 1, 203–209. [Google Scholar] [CrossRef]
- Ardizzone, F.; Cardinali, M.; Galli, M.; Guzzetti, F.; Reichenbach, P. Identification and mapping of recent rainfall-induced landslides using elevation data collected by airborne Lidar. Nat. Hazards Earth Syst. Sci. 2007, 7, 637–650. [Google Scholar] [CrossRef] [Green Version]
- Schulz, W.H. Landslide susceptibility revealed by LIDAR imagery and historical records, Seattle, Washington. Eng. Geol. 2007, 89, 67–87. [Google Scholar] [CrossRef]
- Van Den Eeckhaut, M.; Poesen, J.; Verstraeten, G.; Vanacker, V.; Nyssen, J.; Moeyersons, J.; van Beek, L.P.H.; Vandekerckhove, L. Use of LIDAR-derived images for mapping old landslides under forest. Earth Surf. Process. Landf. 2006, 32, 754–769. [Google Scholar] [CrossRef]
- Amudsen, J.; Johnson, S.; Rousea, K.; Wang, H. Using LiDAR-derived DEM’s to Delineate and Characterize Landslides in Northern Kentucky and Hamilton County, Ohio. Available online: www.trishock.com/academic/pdf/lidar_landslides.pdf (accessed on 3 July 2019).
- Petschko, H.; Bell, R.; Glade, T. Effectiveness of visually analyzing LiDAR DTM derivatives for earth and debris slide inventory mapping for statistical susceptibility modeling. Landslides 2016, 13, 857–872. [Google Scholar] [CrossRef]
- Bernat Gazibara, S.; Krkač, M.; Sečanj, M.; Mihalić Arbanas, S. Identification and Mapping of Shallow Landslides in the City of Zagreb (Croatia) Using the LiDAR–Based Terrain Model. In Advancing Culture of Living with Landslides, Advances in Landslide Science; Mikos, M., Tiwari, B., Yin, Y., Sassa, K., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 1093–1100. [Google Scholar]
- Wehr, A.; Lohr, U. Airborne laser scanning—An introduction and overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Razak, K.A.; Straatsma, M.W.; van Westen, C.J.; Malet, J.-P.; de Jong, S.M. Airborne laser scanning of forested landslides characterization: Terrain model quality and visualization. Geomorphology 2011, 126, 186–200. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.-H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Smith, M.J.; Rose, J.; Booth, S. Geomorphological mapping of glacial landforms from remotely sensed data: An evaluation of the principal data sources and an assessment of their quality. Geomorphology 2006, 76, 148–165. [Google Scholar] [CrossRef]
- Migon, P.; Kasprzak, M.; Traczyk, A. How high-resolution DEM based on airborne LiDAR helped to reinterpret landforms—Examples from the Sudetes, SW Poland. Landf. Anal. 2013, 22, 89–101. [Google Scholar] [CrossRef]
- Jones, A.F.; Brewer, P.A.; Johnstone, E.; Macklin, M.G. High-resolution interpretative geomorphological mapping of river valley environments using airborne LiDAR data. Earth Surf. Process. Landf. 2007, 32, 1574–1592. [Google Scholar] [CrossRef]
- Seppälä, M.V.J. Lidar-Based Detection and Interpretation of Glaciotectonic Features of the Morainic Topography of Finland. J. Geol. Res. 2016, 2016, 4292806. [Google Scholar] [CrossRef]
- Cavalli, M.; Marchi, L. Characterisation of the surface morphology of an alpine alluvial fan using airborne LiDAR. Nat. Hazards Earth Syst. Sci. 2008, 8, 323–333. [Google Scholar] [CrossRef]
- Notebaert, B.; Verstraeten, G.; Govers, G.; Poesen, J. Qualitative and quantitative applications of LiDAR imagery in fluvial geomorphology. Earth Surf. Process. Landf. 2009, 34, 217–231. [Google Scholar] [CrossRef]
- Sarala, P.; Räisänen, J.; Johansson, P.; Eskola, K.O. Aerial LiDAR analysis in geomorphological mapping and geochronological determination of surficial deposits in the Sodankylä region, northern Finland. GFF 2015, 137, 293–303. [Google Scholar] [CrossRef]
- Abalharth, M.; Hassan, M.A.; Klinkenberg, B.; Leung, V.; McCleary, R. Using LiDAR to characterize logjams in lowland rivers. Geomorphology 2015, 246, 531–541. [Google Scholar] [CrossRef]
- Thorndycraft, V.R.; Cripps, J.E.; Eades, G.L. Digital landscapes of deglaciation: Identifying Late Quaternary glacial lake outburst floods using LiDAR. Earth Surf. Process. Landf. 2015, 41, 291–307. [Google Scholar] [CrossRef]
- Bell, R.; Petschko, H.; Röhrs, M.; Dix, A. Assessment of landslide age, landslide persistence and human impact using airborne laser scanning digital terrain models. Geogr. Ann. Ser. A Phys. Geogr. 2012, 94, 135–156. [Google Scholar] [CrossRef]
- Van Den Eeckhaut, M.; Poesen, J.; Verstraeten, G.; Vanacker, V.; Moeyersons, J.; Nyssen, J.; van Beek, L.P.H. The effectiveness of hillshade maps and expert knowledge in mapping old deep-seated landslides. Geomorphology 2005, 67, 351–363. [Google Scholar] [CrossRef]
- Bernat Gazibara, S.; Krkač, M.; Mihalić Arbanas, S. Verification of historical landslide inventory maps for the Podsljeme area in the City of Zagreb using LiDAR-based landslide inventory. Rudarsko Geolosko Naftni Zbornik 2019, 34, 45–58. [Google Scholar]
- James, L.A.; Watson, D.G.; Hansen, W.F. Using LiDAR data to map gullies and headwater streams under forest canopy: South Carolina, USA. Catena 2007, 71, 132–144. [Google Scholar] [CrossRef]
- Höfle, B.; Griesbaum, L.; Forbriger, M. GIS-Based Detection of Gullies in Terrestrial LiDAR Data of the Cerro Llamoca Peatland (Peru). Remote Sens. 2013, 5, 5851–5870. [Google Scholar] [CrossRef] [Green Version]
- Rijal, S.; Wang, G.; Woodford, P.B.; Howard, H.R.; Hutchinson, J.M.S.; Shawn Hutchinson, J.M.; Hutchinson, S.; Schoof, J.; Oyana, T.J.; Li, R.; et al. Detection of gullies in Fort Riley military installation using LiDAR derived high resolution DEM. J. Terramechanics 2018, 77, 15–22. [Google Scholar] [CrossRef]
- Baruch, A.; Filin, S. Detection of gullies in roughly textured terrain using airborne laser scanning data. ISPRS J. Photogramm. Remote Sens. 2011, 66, 564–578. [Google Scholar] [CrossRef]
- Korzeniowska, K.; Korup, O. Mapping gullies using terrain surface roughness. In Proceedings of the 19th AGILE International Conference on Geographic Information Science (AGILE 2016), Helsinki, Finland, 14–17 June 2016. [Google Scholar]
- Casalí, J.; Loizu, J.; Campo, M.A.; De Santisteban, L.M.; Álvarez-Mozos, J. Accuracy of methods for field assessment of rill and ephemeral gully erosion. Catena 2006, 67, 128–138. [Google Scholar] [CrossRef]
- Fadul, H.M.; Salih, A.A.; Ali, I.A.; Inanaga, S. Use of remote sensing to map gully erosion along the Atbara River, Sudan. Int. J. Appl. Earth Obs. Geoinf. 1999, 1, 175–180. [Google Scholar] [CrossRef]
- Daba, S.; Rieger, W.; Strauss, P. Assessment of gully erosion in eastern Ethiopia using photogrammetric techniques. Catena 2003, 50, 273–291. [Google Scholar] [CrossRef]
- Casalí, J.; Giménez, R.; Campo-Bescós, M.A. Gully geometry: What are we measuring? Soil 2015, 1, 509–513. [Google Scholar] [CrossRef]
- Nwankwo, C.; Nwankwoala, H.O. Gully Erosion Susceptibility Mapping in Ikwuano Local Government Area of Abia State usin GIS techniques. Earth Sci. Malays. 2018, 2, 8–15. [Google Scholar]
- Fiorucci, F.; Ardizzone, F.; Rossi, M.; Torri, D. The Use of Stereoscopic Satellite Images to Map Rills and Ephemeral Gullies. Remote Sens. 2015, 7, 14151–14178. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.; Zhang, S.; Pu, L.; Yang, J.; Yang, C.; Chen, J.; Guan, C.; Wang, Q.; Chen, D.; Fu, B.; et al. Gully Erosion Mapping and Monitoring at Multiple Scales Based on Multi-Source Remote Sensing Data of the Sancha River Catchment, Northeast China. ISPRS Int. J. Geo-Inf. 2016, 5, 200. [Google Scholar] [CrossRef]
- Garosi, Y.; Sheklabadi, M.; Pourghasemi, H.R.; Besalatpour, A.A.; Conoscenti, C.; Van Oost, K. Comparison of differences in resolution and sources of controlling factors for gully erosion susceptibility mapping. Geoderma 2018, 330, 65–78. [Google Scholar] [CrossRef]
- Mararakanye, N.; Le Roux, J.J. Gully location mapping at a national scale for South Africa. S. Afr. Geogr. J. 2012, 94, 208–218. [Google Scholar] [CrossRef]
- Blašković, I. Tectonics of part of the Vinodol Valley within the model of the continental crust subduction. Geol. Croat. 1999, 52, 153–189. [Google Scholar] [CrossRef]
- Đomlija, P. Identification and Classification of Landslides and Erosion Phenomena Using the Visual Interpretation of the Vinodol Valley Digital Elevation Model. Ph.D. Thesis, Faculty of Mining, Geology and Petroleum Engineering, University of Zagreb, Zagreb, Croatia, 2018. (In Croatian). [Google Scholar]
- Jurak, V.; Slovenec, D.; Mileusnić, M. Excessive flysch erosion-Salty Creek. In Excursion Guide Book of 3rd Croatian Geological Congress; Biondić, R., Vlahović, I., Velić, I., Eds.; Croatian Geological Survey: Zagreb, Croatia, 2005; pp. 51–55. (In Croatian) [Google Scholar]
- Aljinović, D.; Jurak, V.; Mileusnić, M.; Slovenec, D.; Presečki, F. The origin and composition of flysch deposits as an attribute to the excessive erosion of the Slani Potok Valley (“Salty Creek”), Croatia. Geol. Croat. 2010, 63, 313–322. [Google Scholar] [CrossRef]
- Bernat, S.; Đomlija, P.; Mihalić Arbanas, S. Slope movements and erosion phenomena in the Dubračina River Basin: A geomorphological approach. In Landslide Flood Hazard Assessment, Proceedings 1st Regional Symposium on Landslides in the Adriatic-Balkan Region; with 3rd Work. Croat. Proj. Risk Identif. Land-Use Plan; Disaster Mitig, L., Mihalić Arbanas, S., Arbanas, Ž., Eds.; Croatian Landslide Group, Faculty of Mining, Geology and Petroleum Engineering, University of Rijeka, Faculty of Civil engineering, University of Zagreb: Zagreb, Croatia, 2014; pp. 79–84. [Google Scholar]
- Rogić, V. Vinodol—Contemporary conditions of the regional zonality relations. Croat. Geogr. Bull. 1968, 30, 104–125. (In Croatian) [Google Scholar]
- Đomlija, P.; Bočić, N.; Mihalić Arbanas, S.; Benac, Č. Identification of geomorphological units and hazardous processes in the Vinodol Valley. In Proceedings of the 2nd Regional Symposium on Landslides in the Adriatic-Balkan Region, Belgrade, Serbia; Abolmasov, B., Marjanović, M., Đurić, U., Eds.; Faculty of Mining and Geology, University of Belgrade: Belgrade, Serbia, 2017; pp. 109–116. [Google Scholar]
- Zaninović, K.; Gajić-Čapka, M.; Perčec Tadić, M.; Vučetić, M.; Milković, J.; Bajić, A.; Cindrić, K.; Cvitan, L.; Katušin, Z.; Kaučić, D.; et al. Climate atlas of Croatia 1961-1990, 1971-2000; Croatian Meteorological and Hydrological Service: Zagreb, Croatia, 2008. (In Croatian)
- Croatian Agency for Environment and Nature (CAEN). CORINE Land Cover Croatia. Land Use Map 1:100,000. 2008. Available online: http://corine.azo.hr/corine (accessed on 10 May 2019).
- Đomlija, P.; Bernat, S.; Arbanas Mihalić, S.; Benac, Č. Landslide Inventory in the Area of Dubračina River Basin (Croatia). In Landslide Science for a Safer Geoenvironment, Vol. 2, Methods of Landslide Studies; Sassa, K., Canuti, P., Yin, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 837–842. [Google Scholar] [CrossRef]
- Mileusnić, M.; Slovenec, D.; Jurak, V. Thenardite Efflorescence Indicating Cause of the Excessive Flysch Erosion, Slani Potok, Croatia; Acta Mineralogica-Petrographica, Abstract Series; Nemeth, T., Terbocs, A., Eds.; Department of Mineralogy, Geochemistry and Petrology, University of Szeged: Szeged, Hungary, 2004; p. 75. Available online: http://acta.bibl.u-szeged.hu/31620/1/mineralogica_as_004_075.pdf (accessed on 1 October 2019).
- Benac, Č.; Jurak, V.; Oštrić, M.; Holjević, D.; Petrović, G. Excessive erosion phenomena in the Salty Creek Catchment (Vinodol Valley). In Abstract Book of the 3rd Croatian Geological Congress; Velić, I., Vlahović, I., Biondić, R., Eds.; Croatian Geological Survey: Zagreb, Croatia, 2005; pp. 173–174. [Google Scholar]
- Toy, T.J.; Foster, G.R.; Renard, K.G. Soil Erosion: Processes, Prediction, Measurement, and Control, 1st ed.; John Wiley and Sons: New York, NY, USA, 2002. [Google Scholar]
- Schulz, W.H. Landslides Mapped Using LIDAR Imagery, Seattle, Washington. United States Geological Survey, Open-File Report 2004-1396. Available online: https://pubs.usgs.gov/of/2004/1396 (accessed on 3 July 2019). [CrossRef]
- International Geographical Union (IGU), Commision on Applied Geomorphology, Subcommission on geomorphological mapping. The Unified Key to the Detailed Geomorphological Map of the World 1:25000–1:50000. In Problems of the Detailed Geomorphological Map, Part I.; Project of the Unified Key to the Detailed Geomorphological Map of the World, Part II; Gellert, J., Jolly, F., Eds.; Folia geographica, Series Geographica Physica: Krakow, Poland, 1968. [Google Scholar]
- Ruszkiczay-Rüdiger, Z.; Fodor, L.; Horváth, E.; Telbisz, T. Discrimination of fluvial, eolian and neotectonic features in a low hilly landscape: A DEM-based morphotectonic analysis in the Central Pannonian Basin, Hungary. Geomorphology 2009, 104, 203–217. [Google Scholar] [CrossRef]
- Popit, T.; Verbovšek, T. Analysis of surface roughness in the Sveta Magdalena paleo-landslide in the Rebrnice area. RMZ-Mater. Geoenviron. 2013, 60, 197–204. [Google Scholar]
- Reuter, H.I.; Hengl, T.; Gessler, P.P. Preparation of DEMs for Geomorphometric Analysis. In Geomorphometry—Concepts, Software, Applications. Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Elsevier: Amsterdam, The Netherlands, 2009; Volume 3, pp. 87–120. [Google Scholar] [CrossRef]
- Moore, I.D.; Grayson, R.B.; Ladson, A.R. Digital terrain modelling: A review of hydrological, geomorphological, and biological applications. Hydrol. Process. 1991, 5, 3–30. [Google Scholar] [CrossRef]
- Fiorucci, F.; Cardinali, M.; Carlà, R.; Rossi, M.; Mondini, A.C.; Santurri, L.; Ardizzone, F.; Guzzetti, F. Seasonal landslide mapping and estimation of landslide mobilization rates using aerial and satellite images. Geomorphology 2011, 129, 59–70. [Google Scholar] [CrossRef]
- Dai, W.; Yang, X.; Na, J.; Li, J.; Brus, D.; Xiong, L.; Tang, G. Effects of DEM resolution on the accuracy of gully maps in loess hilly areas. Catena 2019, 177, 114–125. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Erosion | Indicative Recognition Feature | LiDAR and Other Data Most Effective for Identification and Mapping | ||
|---|---|---|---|---|
| Gully erosion | direct | Shape | Elongated or branchy shape of gully channel | Hillshade map Slope map Aspect map |
| Linear shape of gully thalweg | Stream power index map Planform curvature map Profile curvature map | |||
| Morphometric characteristics | Change in slope angle between gully channel and surrounding slopes | Slope map | ||
| Change in aspect between gully channel and surrounding slopes | Aspect map | |||
| Texture | Rough surface within gully channel | Topographic roughness map | ||
| indirect | Accumulations of eroded sediment | Proluvial deposits, fan-shaped | Contour line map Topographic roughness map EGM 1:5000 | |
| Pattern | Proluvial deposits situated at the mouth of gully channel | |||
| Man-made structures | Gully formation along pathways and boundaries between agricultural terraces | Slope map Planform curvature map CBM 1:5000 | ||
| Combined erosion | direct | Appearance | Disturbed slope surface appearance | Hillshade map |
| Size | Small sized drainage network | Stream power index map | ||
| Texture | Rough slope surface | Topographic roughness map | ||
| indirect | Topographic location | Relief concavities | Aspect map Contour line map Slope map | |
| Pattern | Gullies formed in the central part of relief concavities | Delineated gully phenomena | ||
| Accumulations of eroded sediment | Proluvial deposits and colluvial deposits | Contour line map Topographic roughness map EGM 1:5000 | ||
| Sheet erosion | direct | Texture | Smooth surface of the affected area | Topographic roughness map |
| indirect | Erodible deposits | Eluvial deposits with flysch outcrops | EGM 1:5000 | |
| Accumulations of eroded sediment | Colluvial deposits | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Đomlija, P.; Bernat Gazibara, S.; Arbanas, Ž.; Mihalić Arbanas, S. Identification and Mapping of Soil Erosion Processes Using the Visual Interpretation of LiDAR Imagery. ISPRS Int. J. Geo-Inf. 2019, 8, 438. https://doi.org/10.3390/ijgi8100438
Đomlija P, Bernat Gazibara S, Arbanas Ž, Mihalić Arbanas S. Identification and Mapping of Soil Erosion Processes Using the Visual Interpretation of LiDAR Imagery. ISPRS International Journal of Geo-Information. 2019; 8(10):438. https://doi.org/10.3390/ijgi8100438
Chicago/Turabian StyleĐomlija, Petra, Sanja Bernat Gazibara, Željko Arbanas, and Snježana Mihalić Arbanas. 2019. "Identification and Mapping of Soil Erosion Processes Using the Visual Interpretation of LiDAR Imagery" ISPRS International Journal of Geo-Information 8, no. 10: 438. https://doi.org/10.3390/ijgi8100438
APA StyleĐomlija, P., Bernat Gazibara, S., Arbanas, Ž., & Mihalić Arbanas, S. (2019). Identification and Mapping of Soil Erosion Processes Using the Visual Interpretation of LiDAR Imagery. ISPRS International Journal of Geo-Information, 8(10), 438. https://doi.org/10.3390/ijgi8100438