A Modified Methodology for Generating Indoor Navigation Models



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- structures (rooms, corridors, stairs),
- lines (doors, windows, entrances).
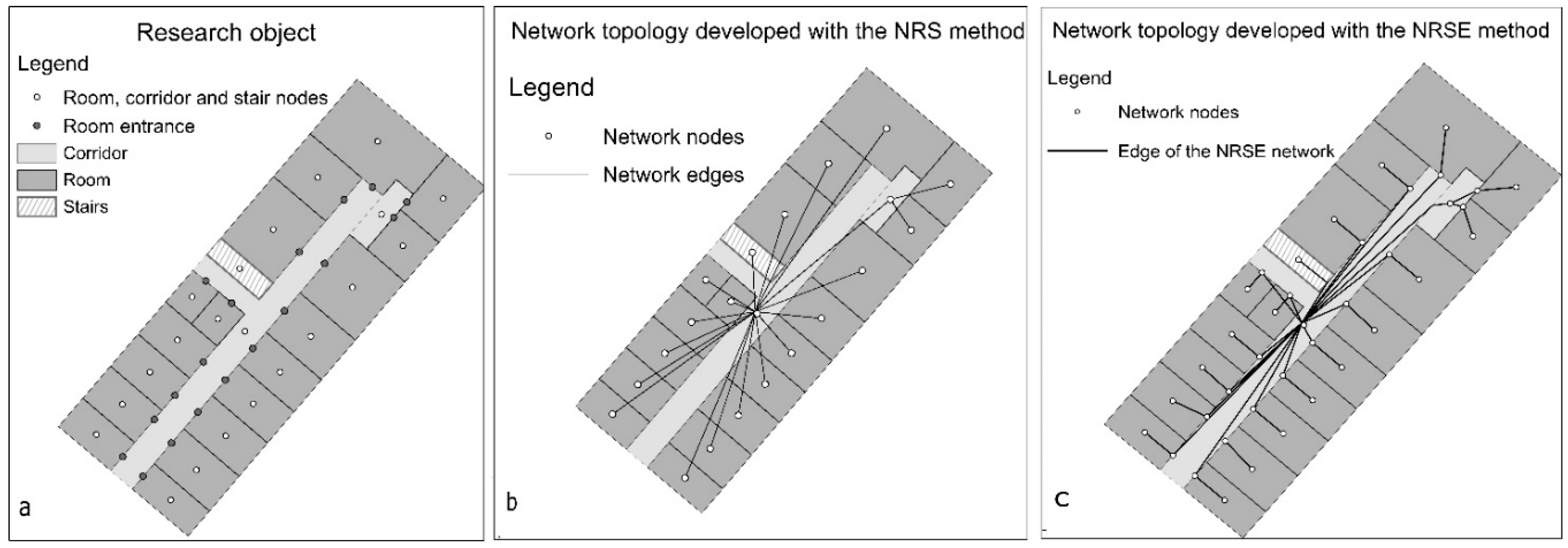
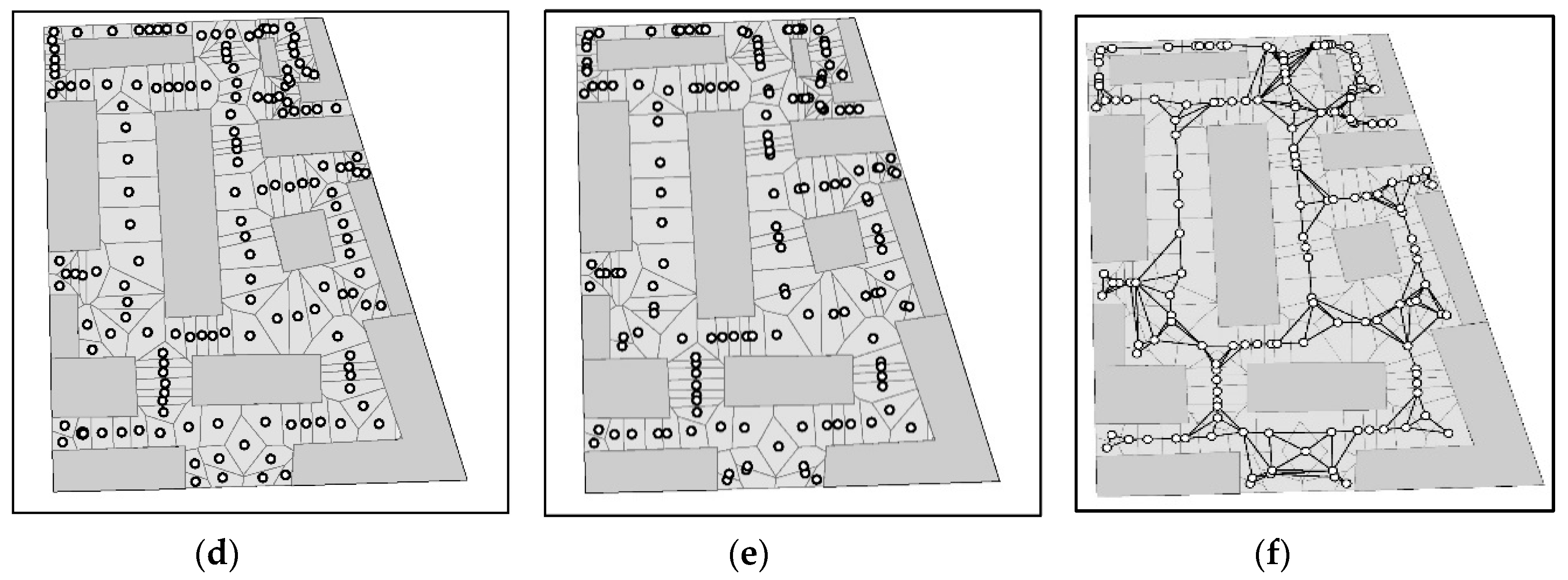
2. Research Objective and Methods
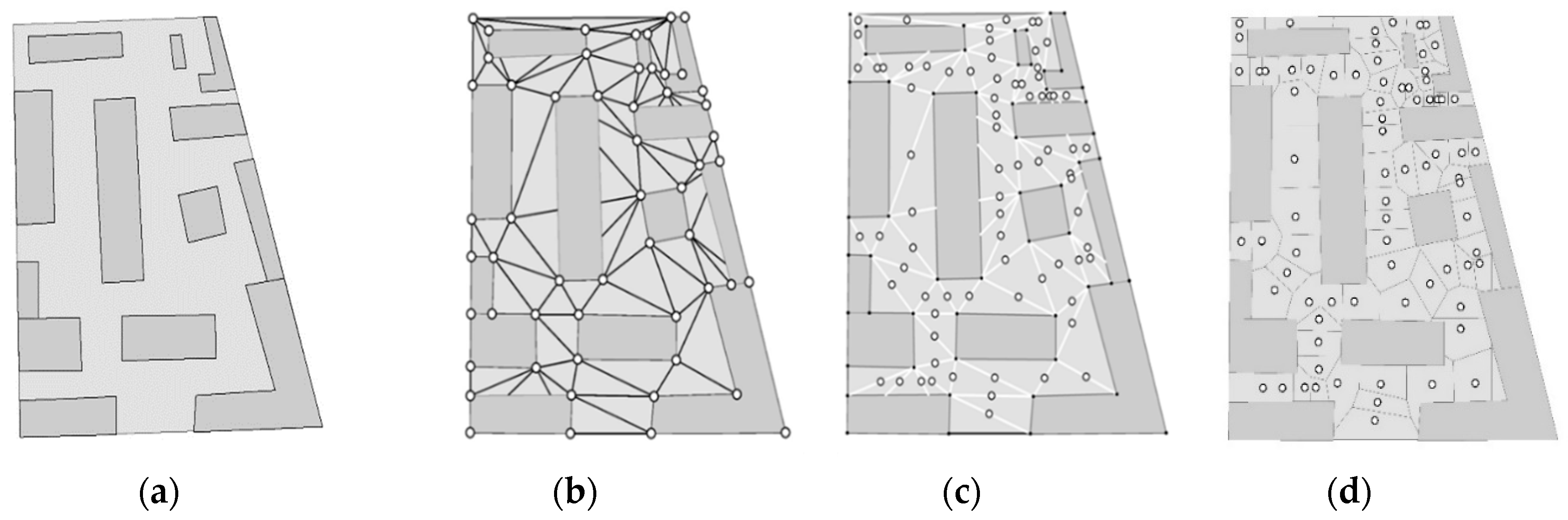
- adopting a set of base points {Pb} from the floor plan (e.g., points representing the vertices of walls and partition walls),
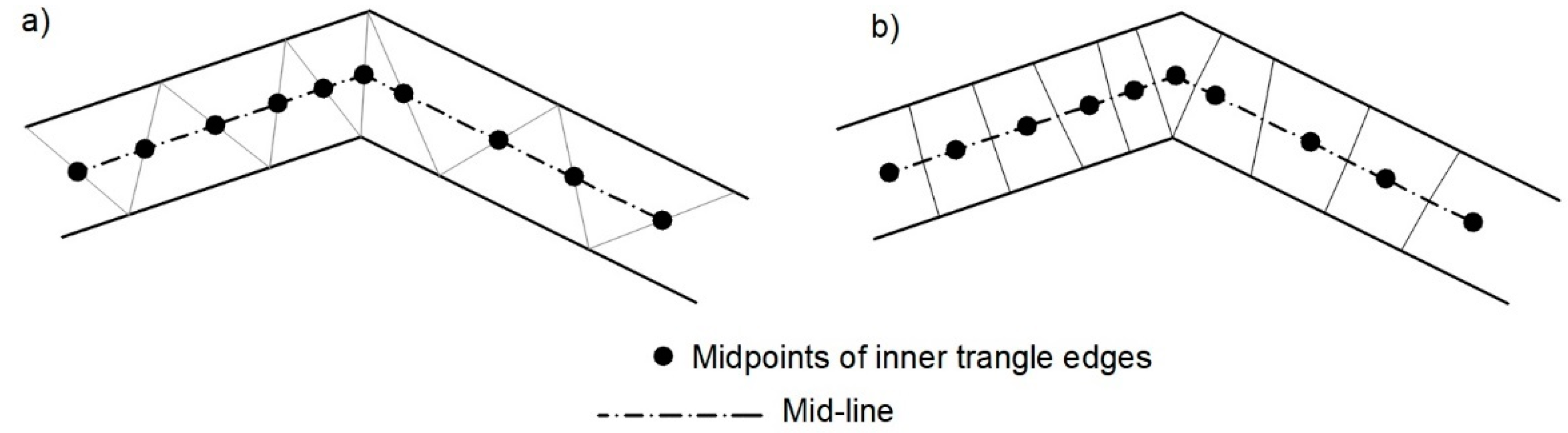
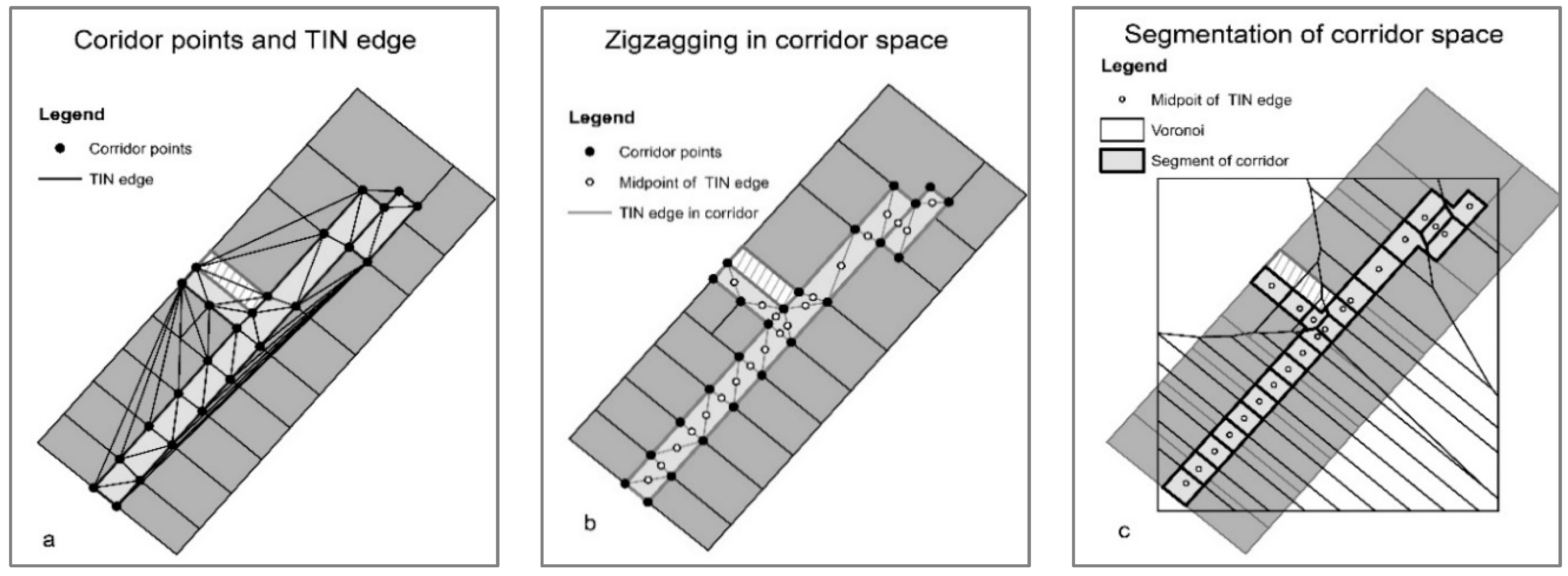
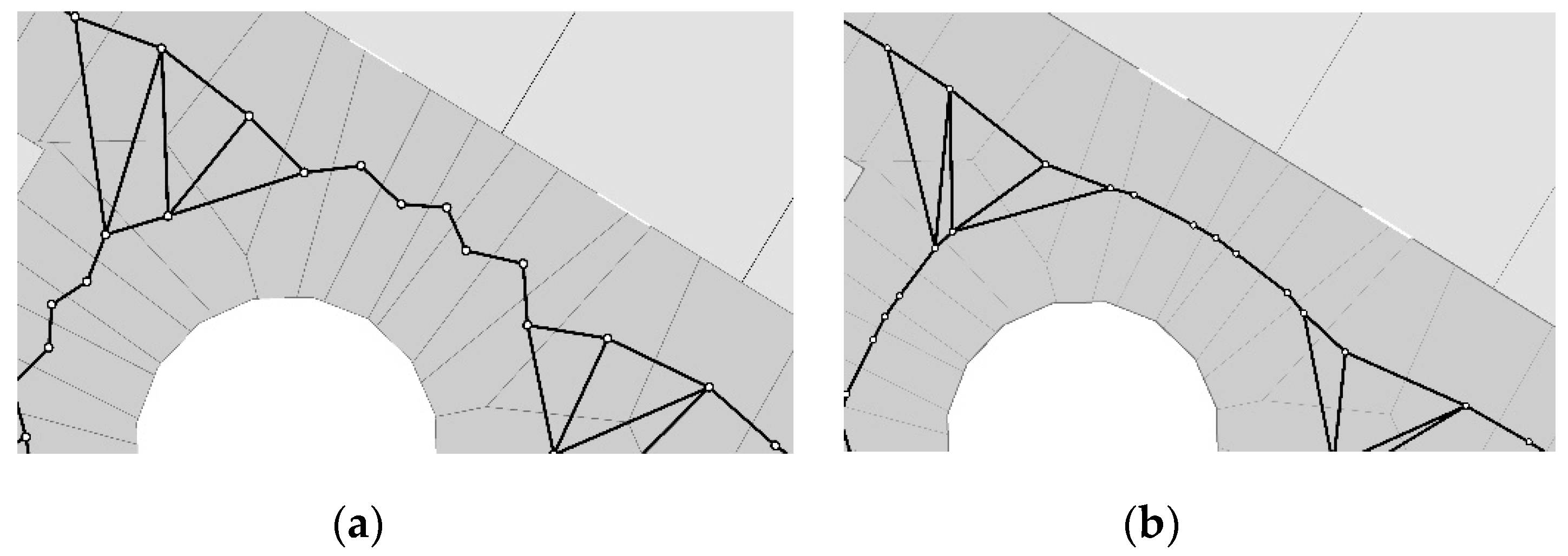
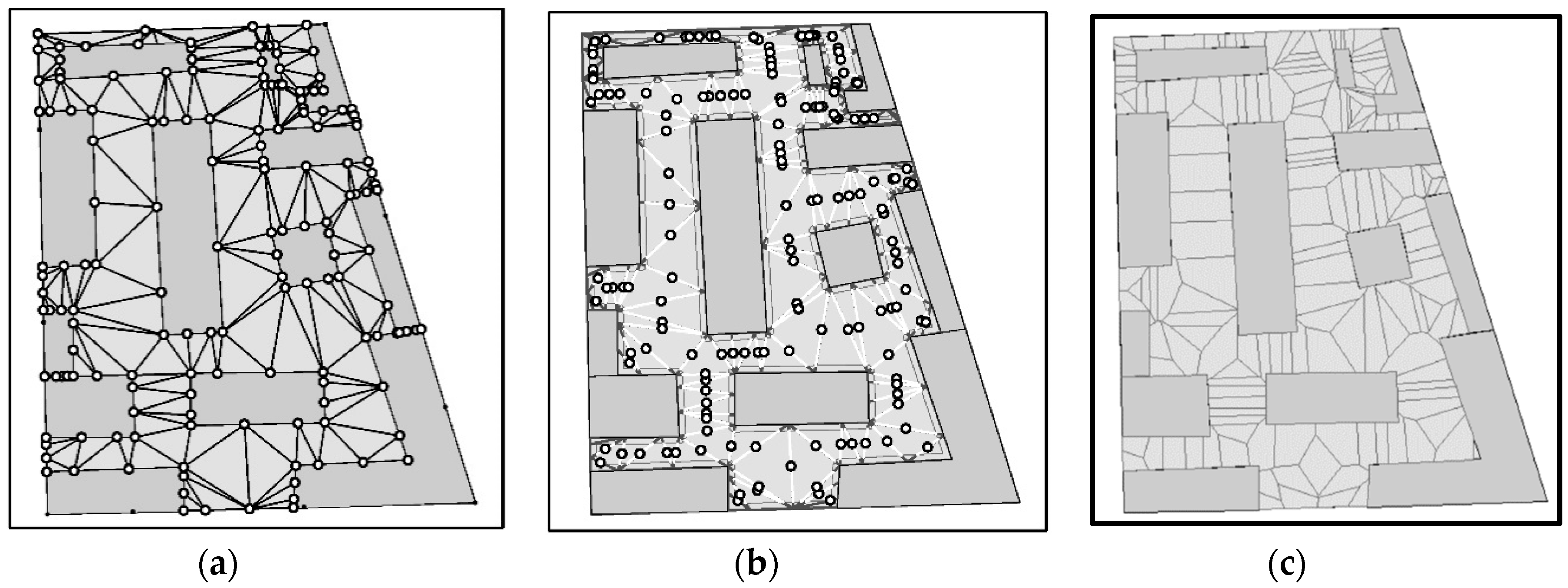
- generating a zigzag line with the Constrained Delaunay Triangulation (CDT) tool for constructing a Triangulated Irregular Network (TIN) based on {Pb},
- selecting edges {Ezigzag} from the TINs located inside the segmented structure S,
- mapping the midpoints {PMid} of edges {Ezigzag},
- generating a Voronoi diagram (VD) based on a set of midpoints {PMid},
- segmenting object S based on VD, i.e., transforming S into a set of segments S→ {SS},
- assigning a point from the {PMid} set to every segment {SS},
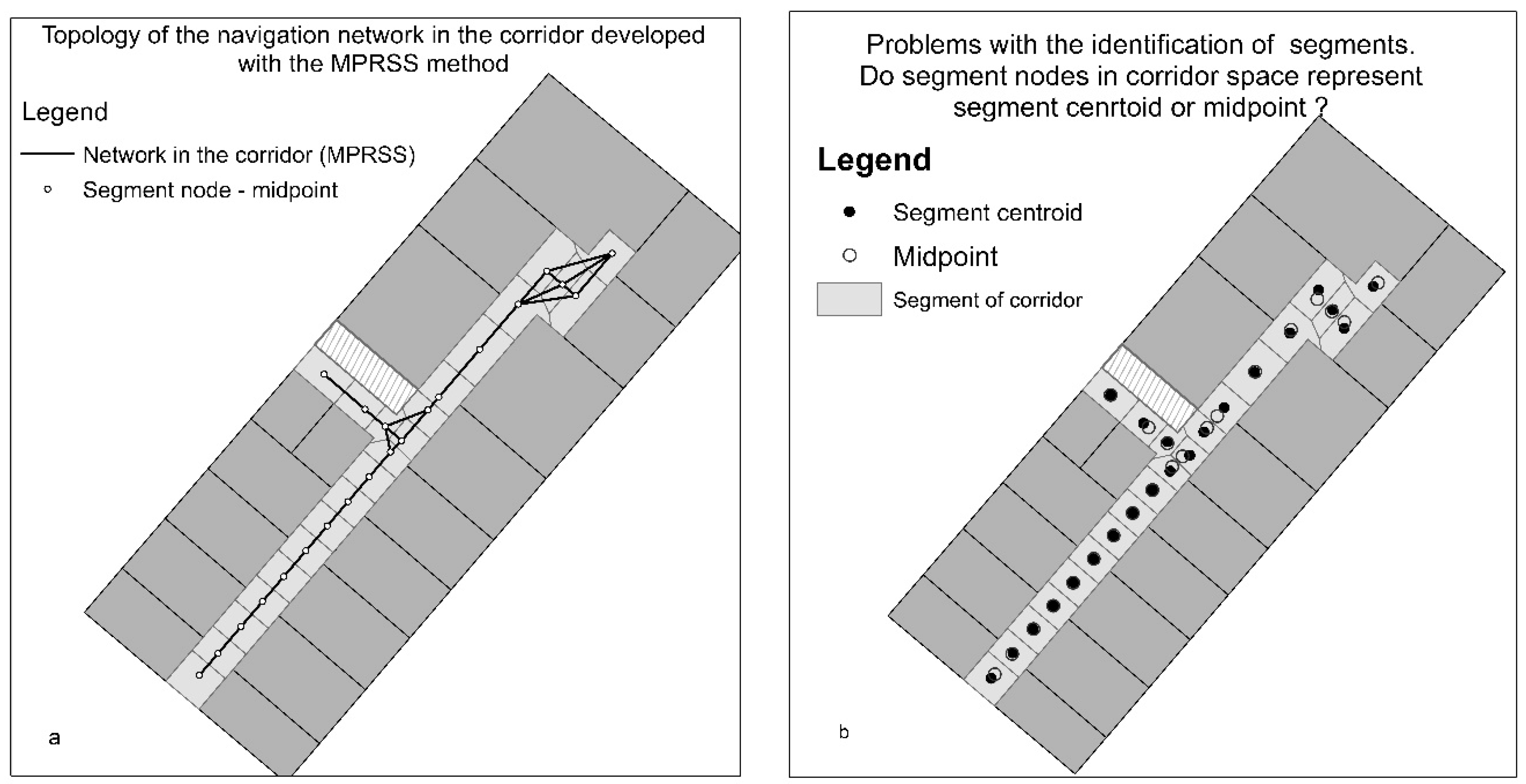
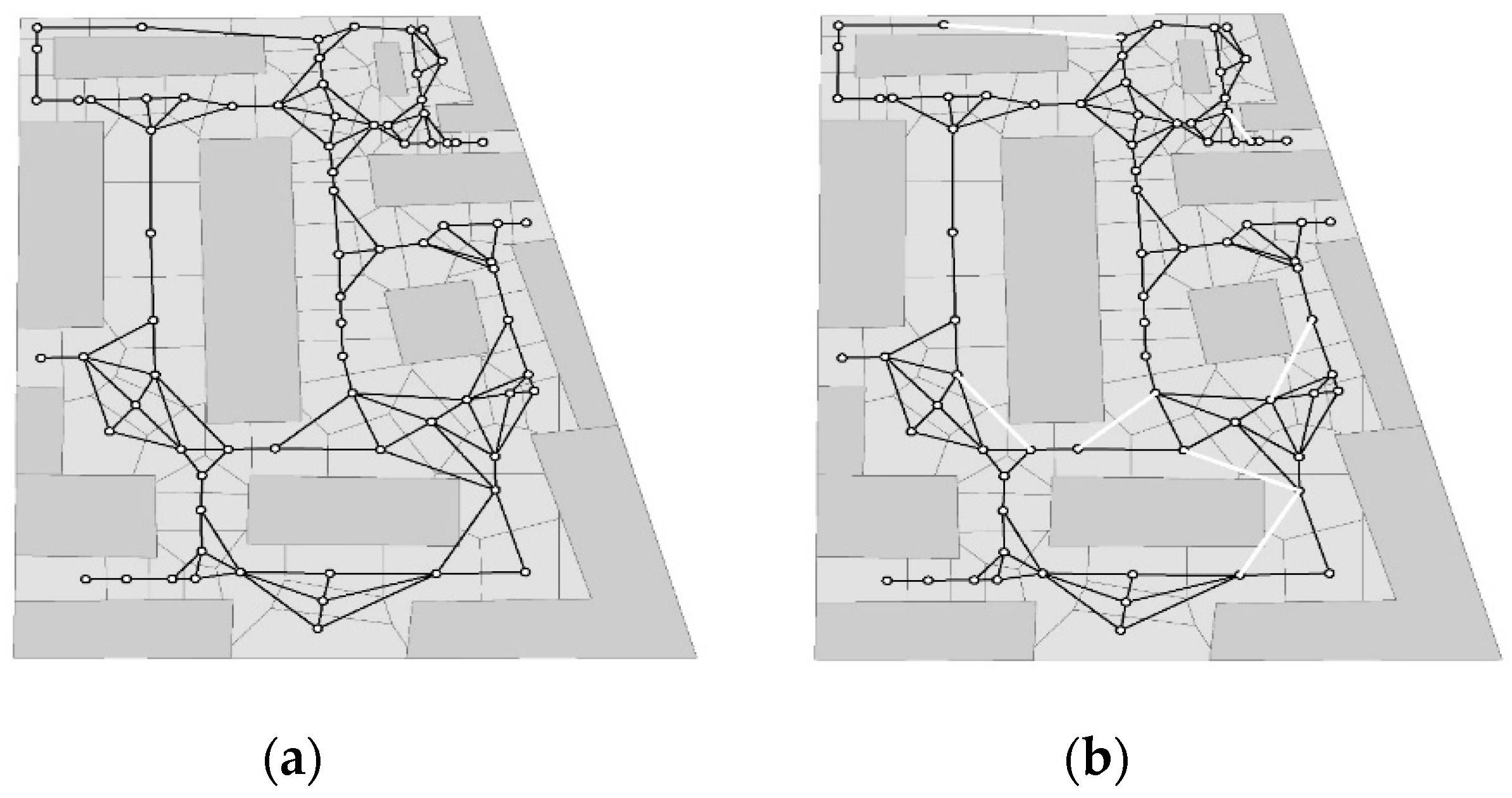
- generating the axis of structure S by developing a topological neighborhood model based on a set of segments {SS} and {PMid}; in this solution, only the relations between segment edges and the left and right polygon are analyzed.
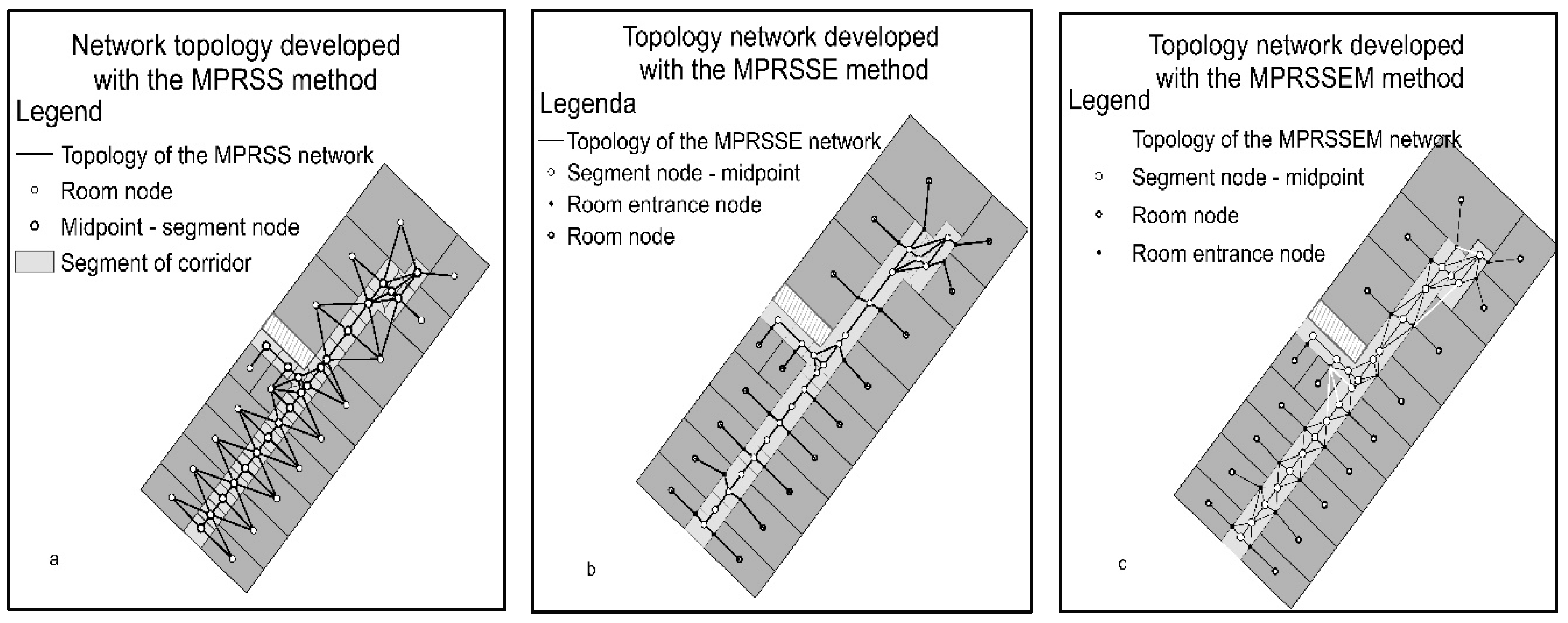
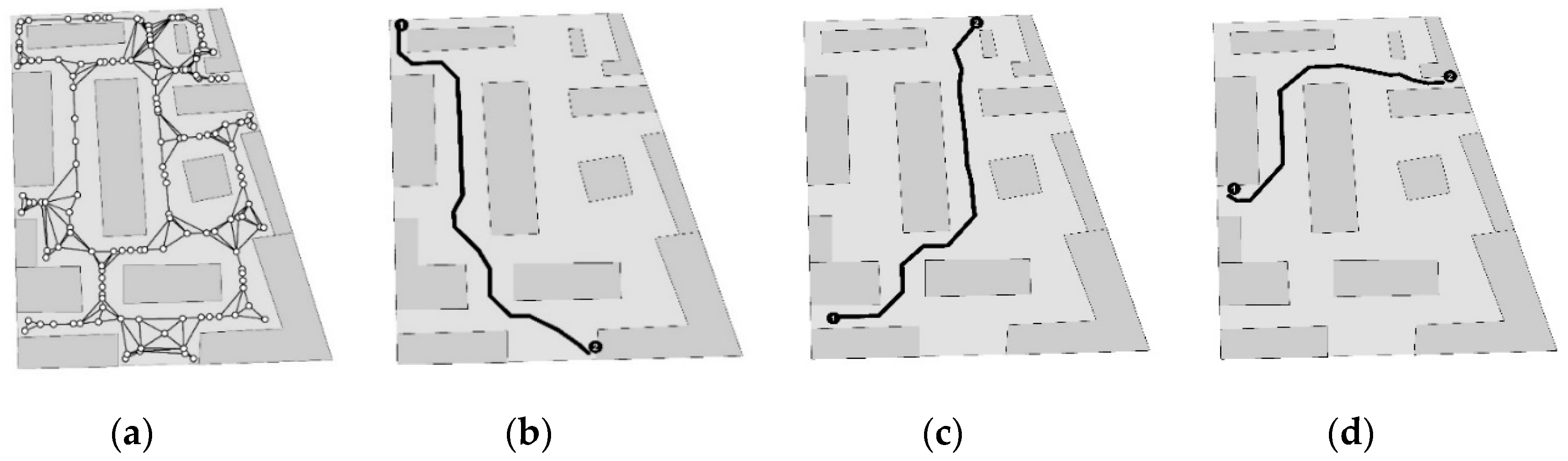
3. Results
- The MPRSS model (Figure 5a) based on (segment–segment), (segment–room), or (segment–stairs) relations,
- The MPRSSE model (Figure 5b) based on (segment–segment), (segment–entrance), (entrance–room), or (segment–stairs) relations,
- The MPRSSEM model combining the relationships from models 1 and 2 (Figure 5c).
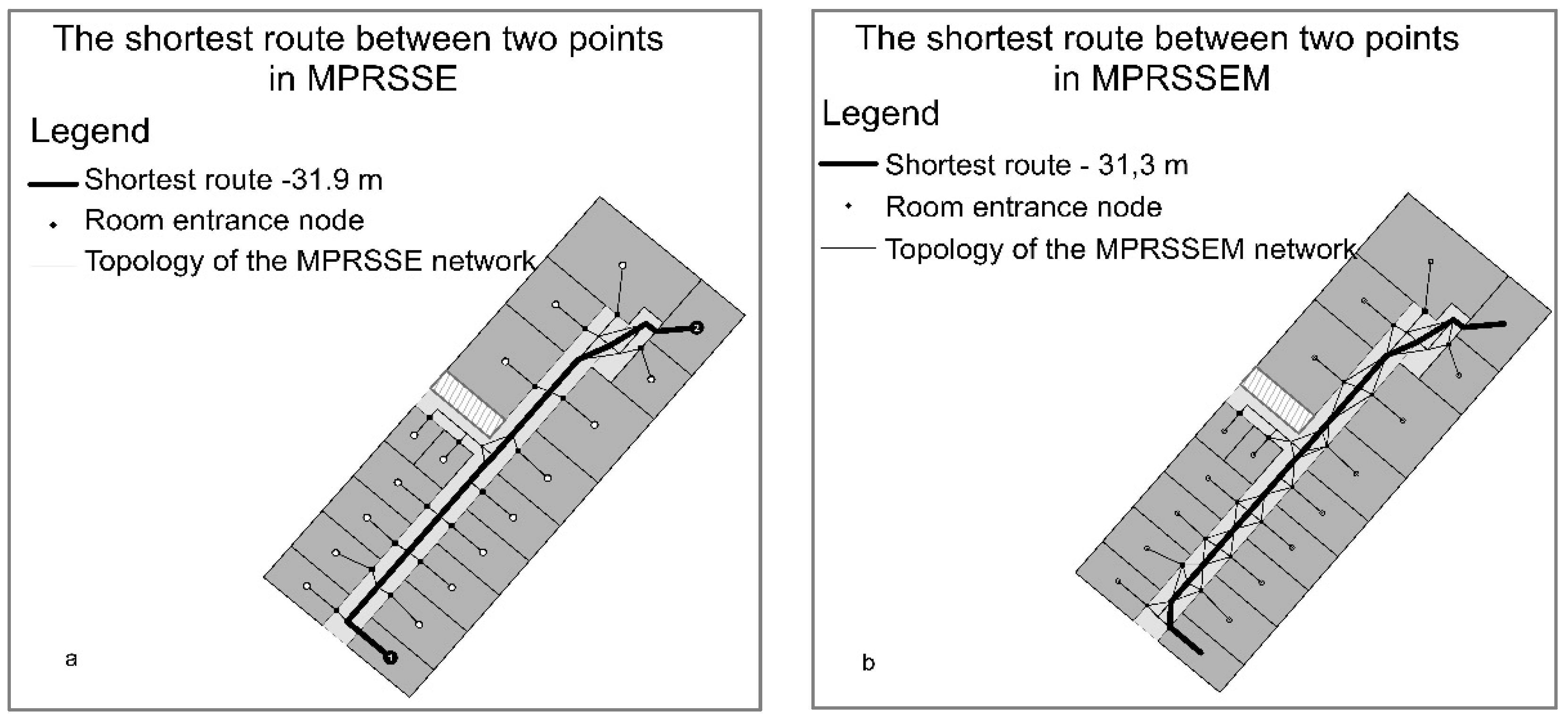
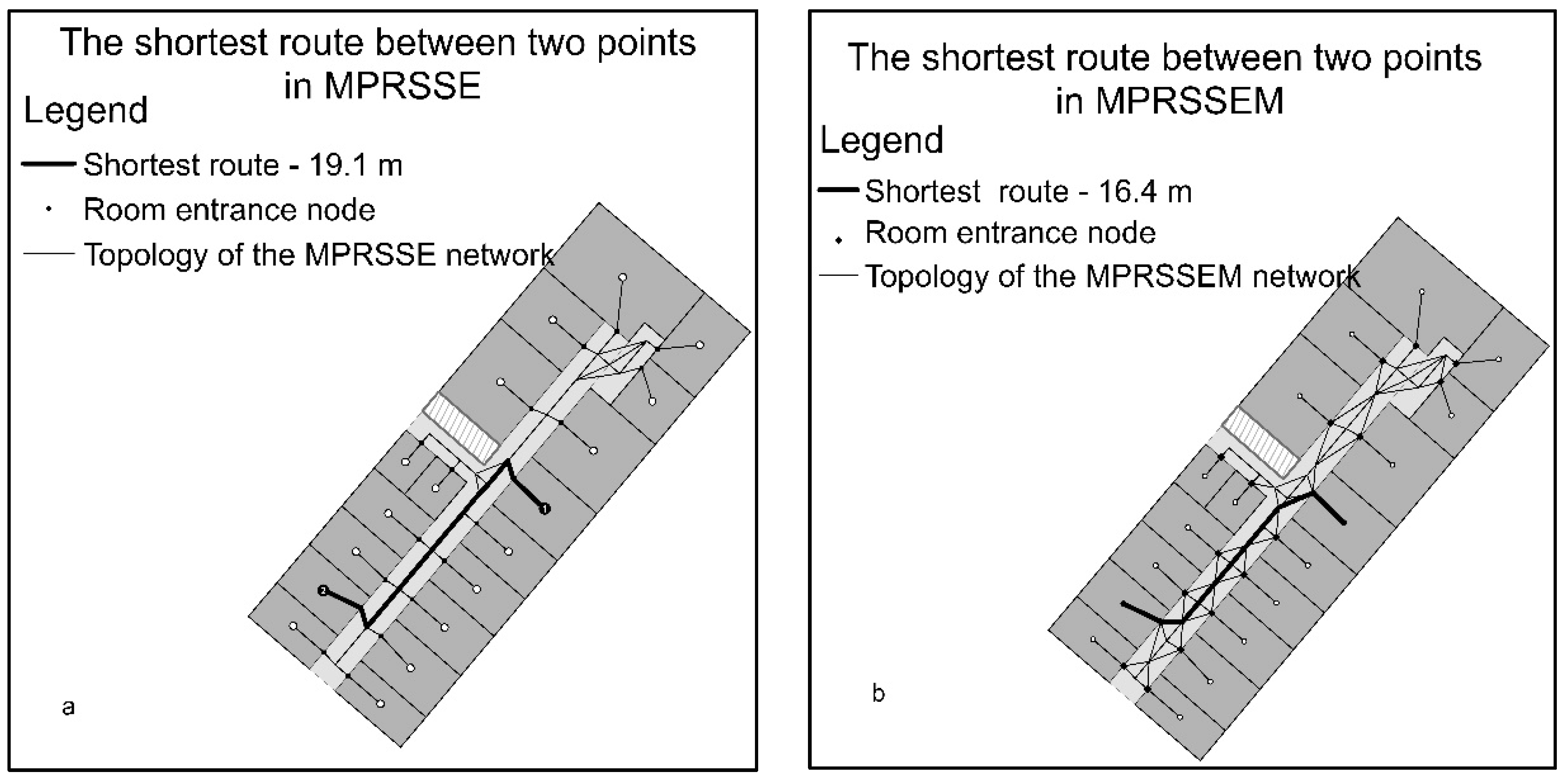
4. Verification of the Proposed Methodology
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hilsenbeck, S.; Bobkov, D.; Scroth, G.; Huitl, R.; Steinbach, E. Graph-based data fusion of pedometer and WiFi measurements for mobile indoor positioning. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 147–158. [Google Scholar]
- Gao, S.; Krogstie, J.; Thingstad, T.; Tran, H. An Empirical Study of the Adoption of an Indoor Location-Based Service Finding Reading Rooms. Int. J. Technol. Hum. Interact. 2017, 13, 70–88. [Google Scholar] [CrossRef]
- Chartrand, G.; Zhang, P. A First Course in Graph Theory; Dover Publications: Mineola, NY, USA, 2012; p. 464. ISBN 100486483681. [Google Scholar]
- Lee, J. A spatial access-oriented implementation of a 3-D GIS topological data model for urban entities. Geoinformatica 2004, 8, 237–264. [Google Scholar] [CrossRef]
- Boeters, R.; Ohori, K.A.; Biljecki, F.; Zlatanova, S. Automatically enhancing CityGML LOD2 models with a corresponding indoor geometry. Int. J. Geogr. Inf. Sci. 2015, 29, 2248–2268. [Google Scholar] [CrossRef]
- Coleman, D.J.; Rajabifard, A.; Kolodziej, K.W. Expanding the SDI environment: Comparing current spatial data infrastructure with emerging indoor location-based services. Int. J. Dig. Earth 2016, 9, 629–647. [Google Scholar] [CrossRef]
- Teo, T.A.; Cho, K.H. BIM-oriented indoor network model for indoor and outdoor combined route planning. Adv. Eng. Inform. 2016, 30, 268–282. [Google Scholar] [CrossRef]
- Lee, J. A Three-Dimensional Navigable Data Model to Support Emergency Response in Microspatial Built-Environments. Ann. Assoc. Am. Geogr. 2007, 97, 512–529. [Google Scholar] [CrossRef]
- Lin, Z.; Xu, Z.; Hu, D.; Li, W. Hybrid Spatial Data Model for Indoor Space: Combined Topology and Grid. Int. J. Geo-Inf. 2017, 6, 343. [Google Scholar] [CrossRef]
- Cichociński, P. Modelowanie ewakuacji z budynków z wykorzystaniem analiz rastrowych (Modelling evacuation of buildings using raster analysis). Roczniki Geomatyki 2017, 4, 341–351. [Google Scholar]
- Cichociński, P. The concept of creating raster accessibility maps for multistorey buildings. In Proceedings of the 25th Anniversary Conference Geographic Information Systems Conference and Exhibition “GIS ODYSSEY 2018”, Perugia, Italy, 10–14 September 2018; pp. 111–119. [Google Scholar]
- Prinz, F.B.; Cern, J.H. Geometric abstractions using medial axis transformation. In University Libraries Carnegie Mellon University; Research Showcase @ C MU: Pittsburgh, PA, USA, 1988. [Google Scholar]
- Eppstein, D.; Erickson, J. Raising roofs, crashing cycles and playing pool. Applications of a Data Structure for Finding Pairwise Interactions. Discrete & Computational Geometry. Discret. Comput. Geom. 1999, 22, 569–592. [Google Scholar]
- Choi, J.; Lee, J. 3D Geo-Information Sciences; Springer: Berlin, Germany, 2009; pp. 283–299. [Google Scholar]
- Mortari, F.; Zlatanova, S.; Liu, L.; Clementini, E. Improved geometric network model (IGNM): A novel approach for deriving connectivity graphs for indoor navigation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, II-4, 45–51. [Google Scholar] [CrossRef]
- Joan-Arinyo, R.; Pérez-Vidal, L.; Gargallo-Monllau, E. An adaptive algorithm to compute the medial axis transform of 2-d polygonal domains. In CAD Systems Development Tools and Methods; Roller, D., Brunet, P., Eds.; Springer: Berlin/Heidelberg, Germany, 1997; pp. 283–298. [Google Scholar]
- Aichholzer, O.D.; Alberts, D.; Aurenhammer, F.; Gärtner, B. A novel type of skeleton for polygons. J. Univers. Comput. Sci. 1995, 1, 752–761. [Google Scholar]
- Cheng, S.W.; Vigneron, A. Motorcycle Graphs and Straight Skeletons. Algorithmica 2007, 47, 159. [Google Scholar] [CrossRef]
- Tang, S.J.; Zhu, Q.; Wang, W.W.; Zhang, Y.T. Automatic topology derivation from IFC building model for in-door intelligent navigation. Remote Sens. Spat. Inf. Sci. 2015, XL-4/W5, 7–11. [Google Scholar] [CrossRef]
- Lewandowicz, E. 3D Cadastre, building 3D models with navigation network. In New challenges for land Information Systems in the Light of European Standards; Croatian Information Technology Society, GIS Forum: Zagreb, Croatia, 2015; pp. 28–38. ISBN 978-953-6129-47-8. [Google Scholar]
- Bogusławski, P.; Mahdjoubi, L.; Zverovich, V.; Fadli, F. Automated construction of variable density navigable networks in a 3D indoor environment for emergency response. Autom. Constr. 2016, 72, 115–128. [Google Scholar] [CrossRef] [Green Version]
- Bogusławski, P.; Mahdjoubi, L.; Zverovich, V.; Fadli, F. A dynamic approach for evacuees’ distribution and optimal routing in hazardous environments. Autom. Constr. 2018, 94, 11–21. [Google Scholar] [CrossRef]
- Lorenz, B.; Ohlbach, H.J.; Stoffel, E.P. A hybrid spatial model for representing indoor environments. In Web and Wireless Geographical Information Systems; Carswell, J.D., Tezuka, T., Eds.; Springer: Berlin, Germany, 2006; pp. 102–112. [Google Scholar]
- Stoffel, E.P.; Lorenz, B.; Ohlbach, H.J. Towards a semantic spatial model for pedestrian indoor navigation. In Advances in Conceptual Modeling–Foundations and Applications; Springer: Berlin/Heidelberg, Germany, 2007; pp. 328–337. [Google Scholar]
- Whiting, E.J. Geometric, Topological & Semantic Analysis of Multi—Building Floor Plan Data. Doctoral Dissertation, Massachusetts Institute of Technology, Cambridge, MA, USA, 2006. [Google Scholar]
- Zhu, Q.; Li, Y.; Xiong, Q.; Zlatanova, S.; Ding, Y.; Zhang, Y.; Zhou, Y. Indoor Multi-Dimensional Location GML and Its Application for Ubiquitous Indoor Location Services. ISPRS Int. J. Geo-Inf. 2016, 5, 220. [Google Scholar] [CrossRef]
- Xu, M.; Wei, S.; Zlatanova, S. An indoor navigation approach considering obstacles and space subdivision OF 2D PLAN. ISPRS—International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2016, XLI-B4, 339–346. [Google Scholar] [CrossRef]
- Krūminaitė, M. Space Subdivision for Indoor Navigation. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2014. [Google Scholar]
- Ai, T.; Yang, S.K.M.; Li, J. Envelope generation and simplification of polylines using Delaunay triangulation. Int. J. Geogr. Inf. Sci. 2017, 3, 297–319. [Google Scholar] [CrossRef]
- Xu, M.; Hijazi, I.; Mebarki, A.; Meouche, R.E.; Abune’meh, M. Indoor guided evacuation: TIN for graph generation and crowd evacuation. Geom. Nat. Hazards Risk 2016. [Google Scholar] [CrossRef]
- Wallgrün, J.O. Autonomous Construction of Hierarchical Voronoi-Based Route Graph Representations. In Proceedings of the 4th International Conference on Spatial Cognition: Reasoning Action, Interaction, Proceeding SC’04, Frauenchiemsee, Germany, 11–13 October 2004; pp. 413–433. [Google Scholar] [CrossRef]
- Liu, L.; Zlatanova, S. An Approach for Indoor Path Computation among Obstacles that Considers User Dimension. ISPRS Int. J. Geo-Inf. 2015, 4, 2821–2841. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Zlatanova, S. Towards a 3D Network Model for Indoor Navigation. In Urban Regional Data Management UDMS Annual; Taylor & Francis: London, UK, 2011; pp. 79–94. [Google Scholar]
- Yang, L.; Worboys, M.F. Generation of navigation graphs for indoor space. Int. J. Geogr. Inf. Sci. 2015, 29, 1737–1756. [Google Scholar] [CrossRef]
- Yang, L.; Sun, X.; Zhu, A.; Chi, T. A Multiple Ant Colony Optimization Algorithm for Indoor Room Optimal Spatial Allocation. ISPRS Int. J. Geo-Inf. 2017, 6, 161. [Google Scholar] [CrossRef]
- Staats, B.R.; Diakit, A.A.; Voute, R.L.; Zlatanova, S. Automatic generation of indoor navigable space using a point cloud and its scanner trajectory. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, IV-2/W4, 393–400. [Google Scholar] [CrossRef]
- Alattas, A.F.; Zlatanova, S.; Oosterom, P.V.; Chatzinikolaou, E.; Lemmen, Ch.; Li, K.J. Supporting Indoor Navigation Using Access Rights to Spaces Based on Combined Use of IndoorGML and LADM Models. Int. J. Geo-Inf. 2017, 6, 384. [Google Scholar] [CrossRef]
- Yan, J. Seamless Pedestrian Navigation in Indoor/Outdoor Large Spaces with No Clear Patterns for Movement. 3D Geoinformation. Available online: https://www.researchgate.net/profile/Jinjin_Yan2/project/Navigation-for-Indoor-Outdoor-Large-Spaces-with-No-Clear-Pattern-for-Movement/attachment/5bd8f1773843b0067541b0c4/AS:687584162365444@1540944247407/download/02+-+Jinjin+Yan+-+PhD+Research+Proposal.pdf?context=ProjectUpdatesLog (accessed on 30 November 2018).
- Lewandowicz, E.; Lisowski, P. Methodology to generate navigation models in building. J. Civ. Eng. Manag. 2018, 24, 619–629. [Google Scholar] [CrossRef]
- Lewandowicz, E.; Lisowski, P. Metodyka tworzenia modeli sieci drogowych w oparciu o dane katastralne (Methods of creating models of road networks based on cadastral data). Roczniki Geomatyki 2018, 4, 321342. [Google Scholar]
- Kodzik, A. Modernization of the Building Base to New Standards 2 and 3D (Modernizacja bazy lokali WGiGP do Nowych Standardów 2 i 3D). Master’s Thesis, University of Warmia and Mazury in Olsztyn, Olsztyn, Poland, 2014. [Google Scholar]
- Diakité, A.; Zlatanova, S. Spatial subdivision of complex indoor environments for 3D indoor navigation. Int. J. Geogr. Inf. Sci. 2018, 32, 213–235. [Google Scholar] [CrossRef]















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lewandowicz, E.; Lisowski, P.; Flisek, P. A Modified Methodology for Generating Indoor Navigation Models. ISPRS Int. J. Geo-Inf. 2019, 8, 60. https://doi.org/10.3390/ijgi8020060
Lewandowicz E, Lisowski P, Flisek P. A Modified Methodology for Generating Indoor Navigation Models. ISPRS International Journal of Geo-Information. 2019; 8(2):60. https://doi.org/10.3390/ijgi8020060
Chicago/Turabian StyleLewandowicz, Elżbieta, Przemysław Lisowski, and Paweł Flisek. 2019. "A Modified Methodology for Generating Indoor Navigation Models" ISPRS International Journal of Geo-Information 8, no. 2: 60. https://doi.org/10.3390/ijgi8020060
APA StyleLewandowicz, E., Lisowski, P., & Flisek, P. (2019). A Modified Methodology for Generating Indoor Navigation Models. ISPRS International Journal of Geo-Information, 8(2), 60. https://doi.org/10.3390/ijgi8020060