A Low-Altitude Flight Conflict Detection Algorithm Based on a Multilevel Grid Spatiotemporal Index

 ,
,
Abstract
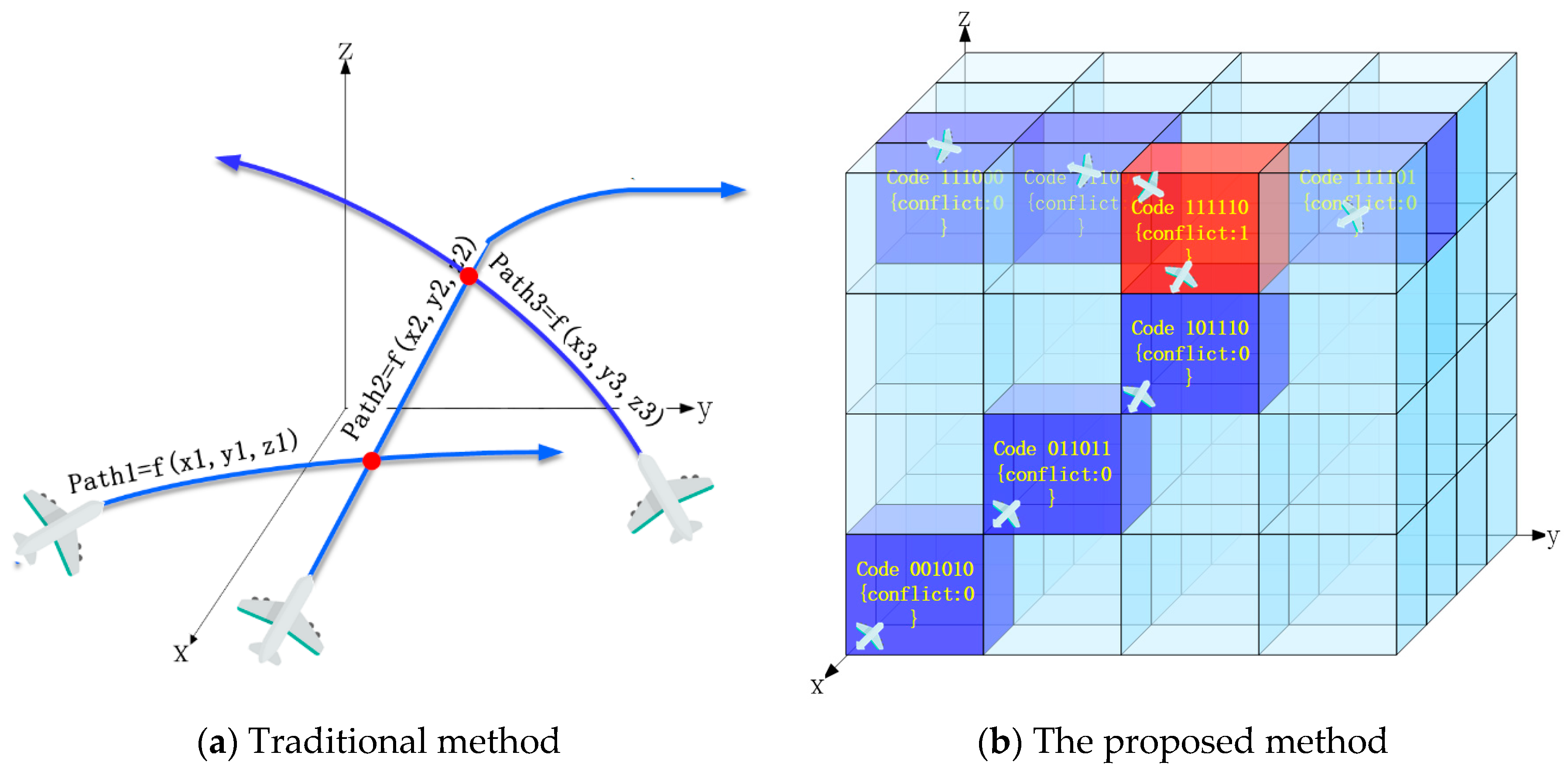
:1. Introduction
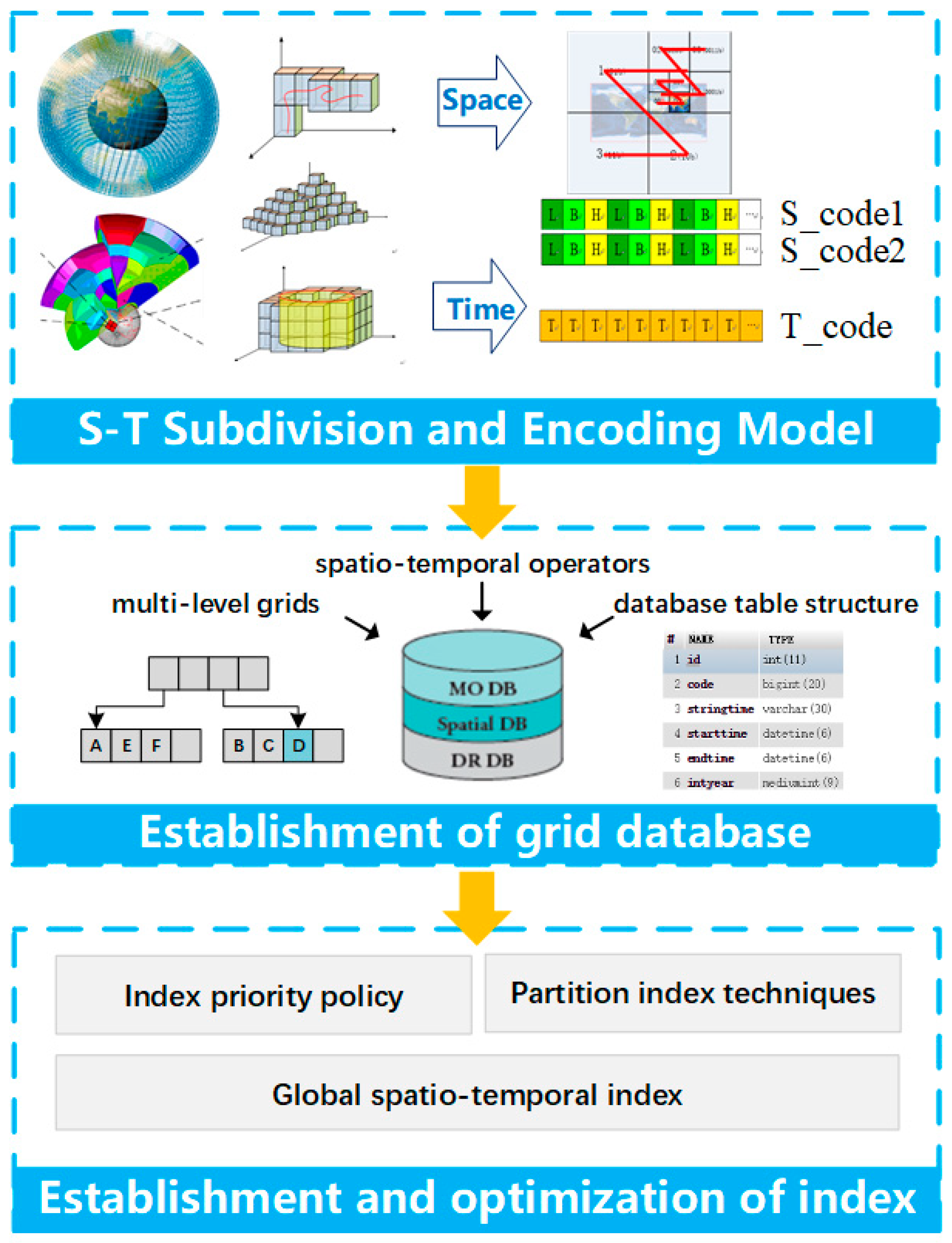
2. Materials and Methods
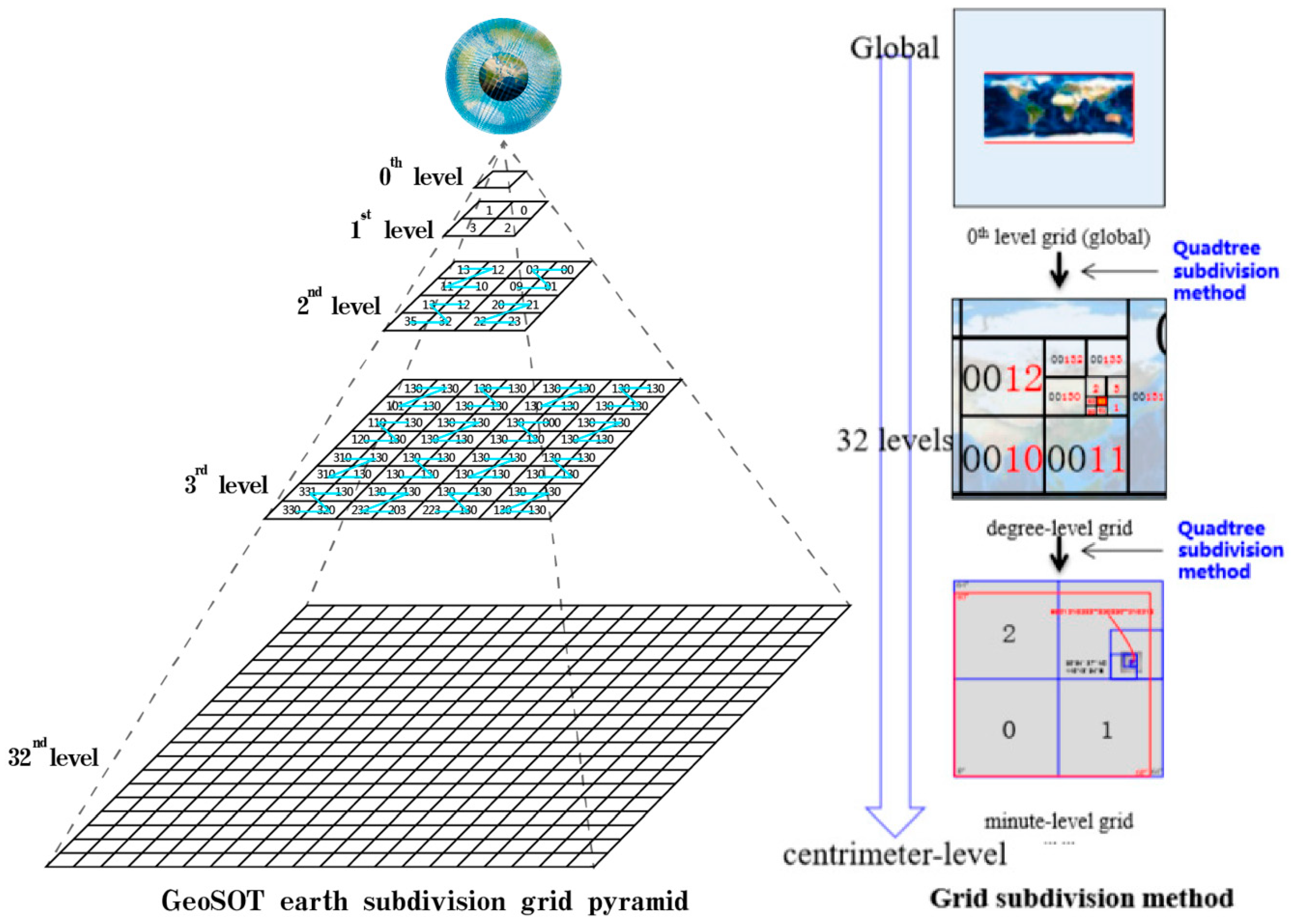
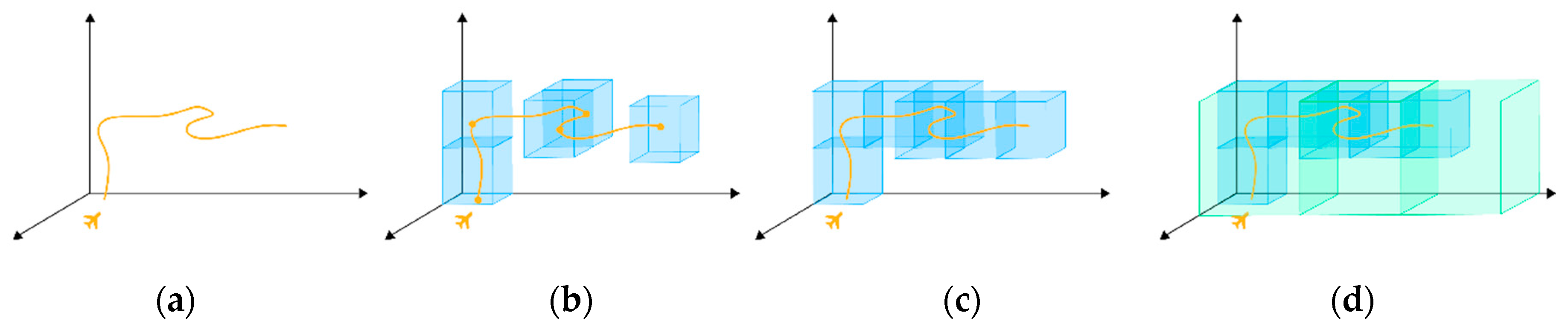
2.1. Spatiotemporal Subdivision and Encoding Model
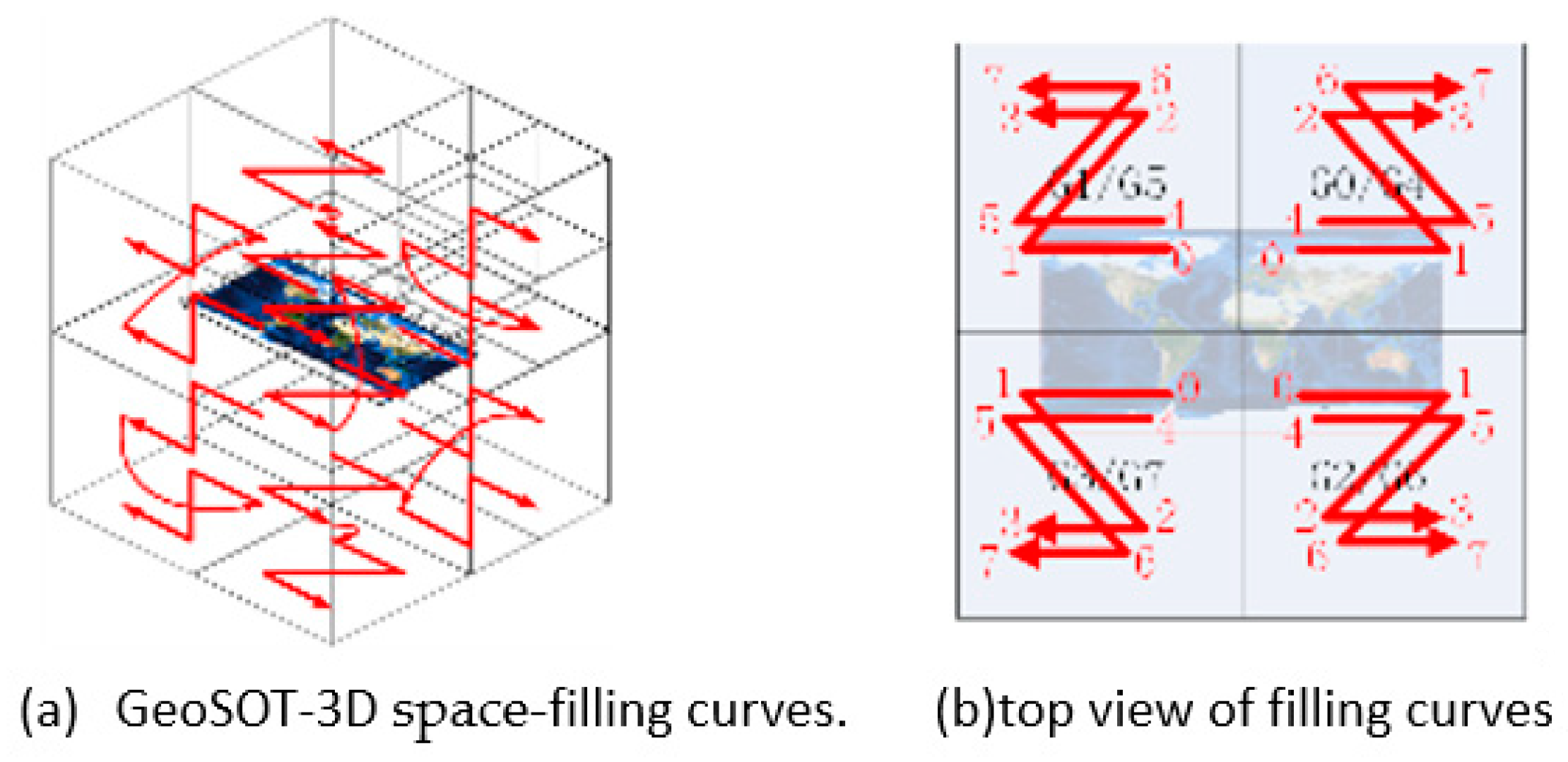
2.1.1. Space Subdivision
- The selected grid side length must be positively correlated to the speed (the faster the speed, the larger the side length of the grid).
- The selected trajectory-scale level must neither be too high nor too low, since low levels would make the grids too large to accurately describe the true flight trajectories and excessively high levels could lead to significant trajectory fragmentation.
- To highlight the benefits of grid-coded multiscale query and retrieval, a two-level or multilevel grid database is normally established to utilize the multiscale of subdivision grids by downward segmentation and upward aggregation. When dividing sub-tables by row, lower-level patches are included into the same sub-table as elements of the upper-level patches to improve the efficiency of data retrieval.
- To utilize the benefits of multiscale grids, the grid side length may be used as a criterion for conflict thresholds. If the flying safety distance is 1000 m, for example, the level-16 grids of GeoSOT may be used [21].
2.1.2. Time Subdivision
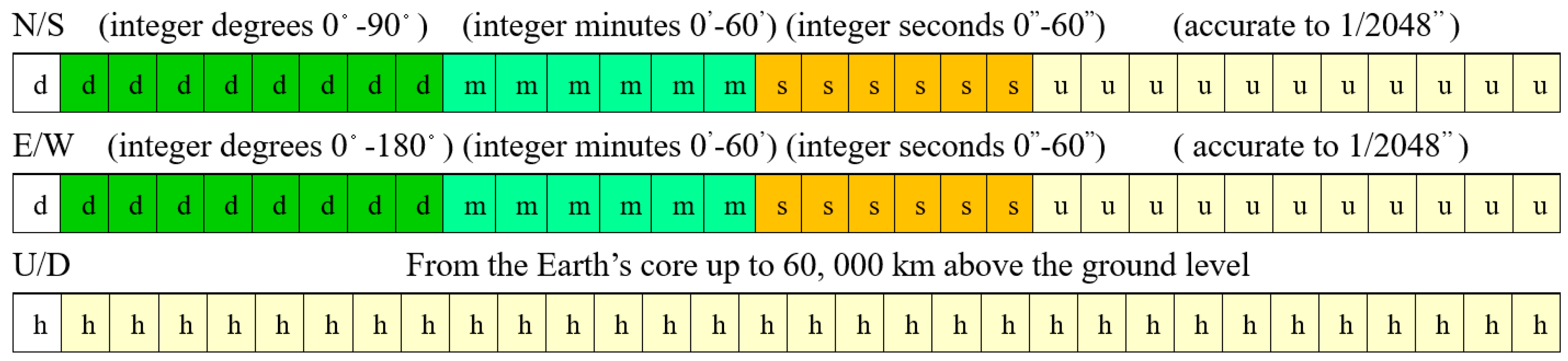
2.1.3. Unified Spatiotemporal Encoding
GeoSOT-3D Subdivision Volume Element Encoding Algorithm
Binary 3D Space Encoding Algorithm
Binary Time Encoding Algorithm
3. Database Table Design and Establishment and Optimization of the Index
3.1. Database Table Structure Design
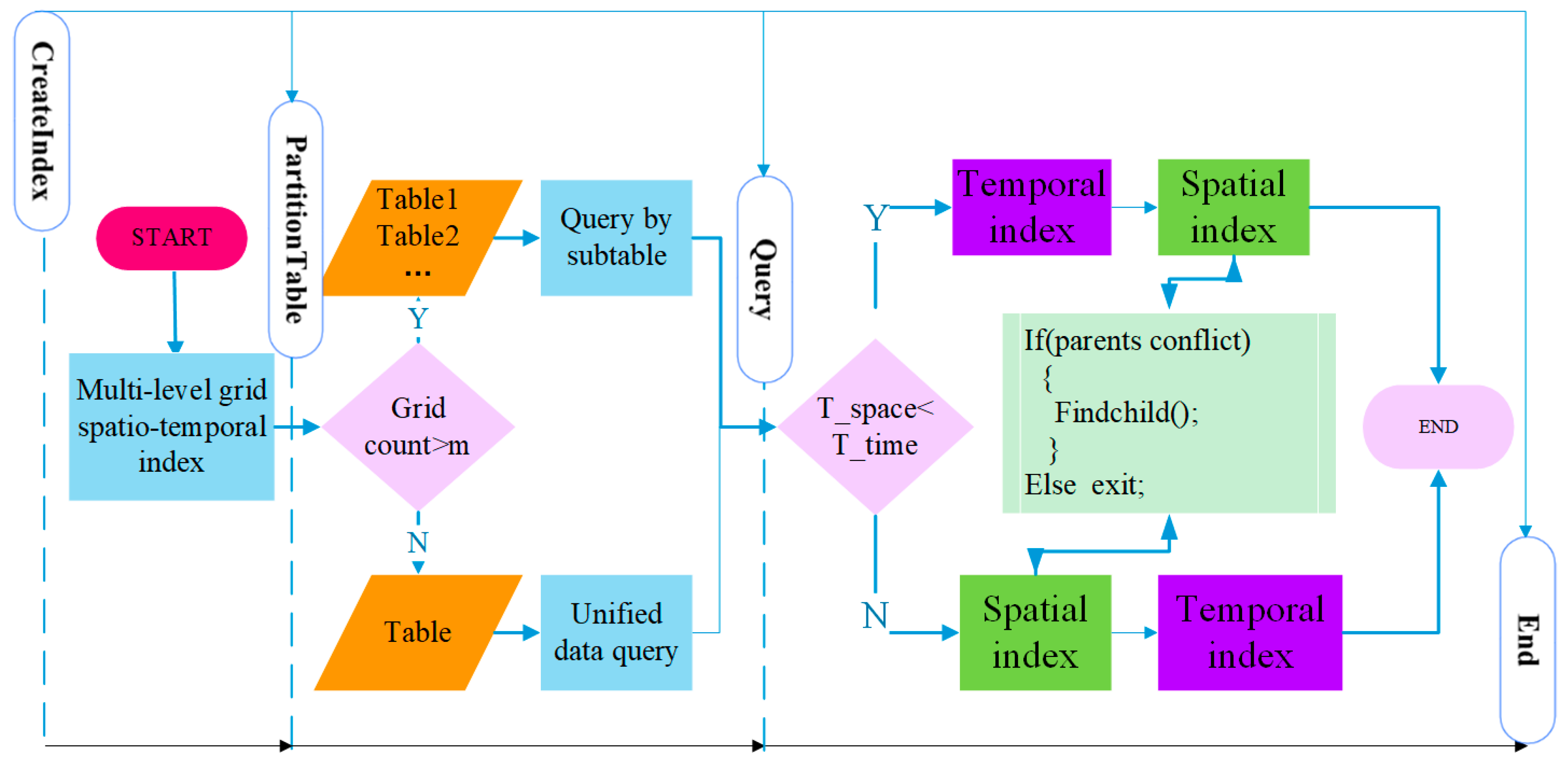
3.2. Establishment and Optimization Index
3.2.1. Global Spatial Index and Temporal Index of Multilevel Grids
3.2.2. Partition Index Techniques
3.2.3. Space Index and Time Index Priority Policy
3.2.4. Real-Time (Dynamic/Static) Conflict Detection
4. Prototype System Implementation and Experiments
4.1. Case Description
4.2. Prototype System Development
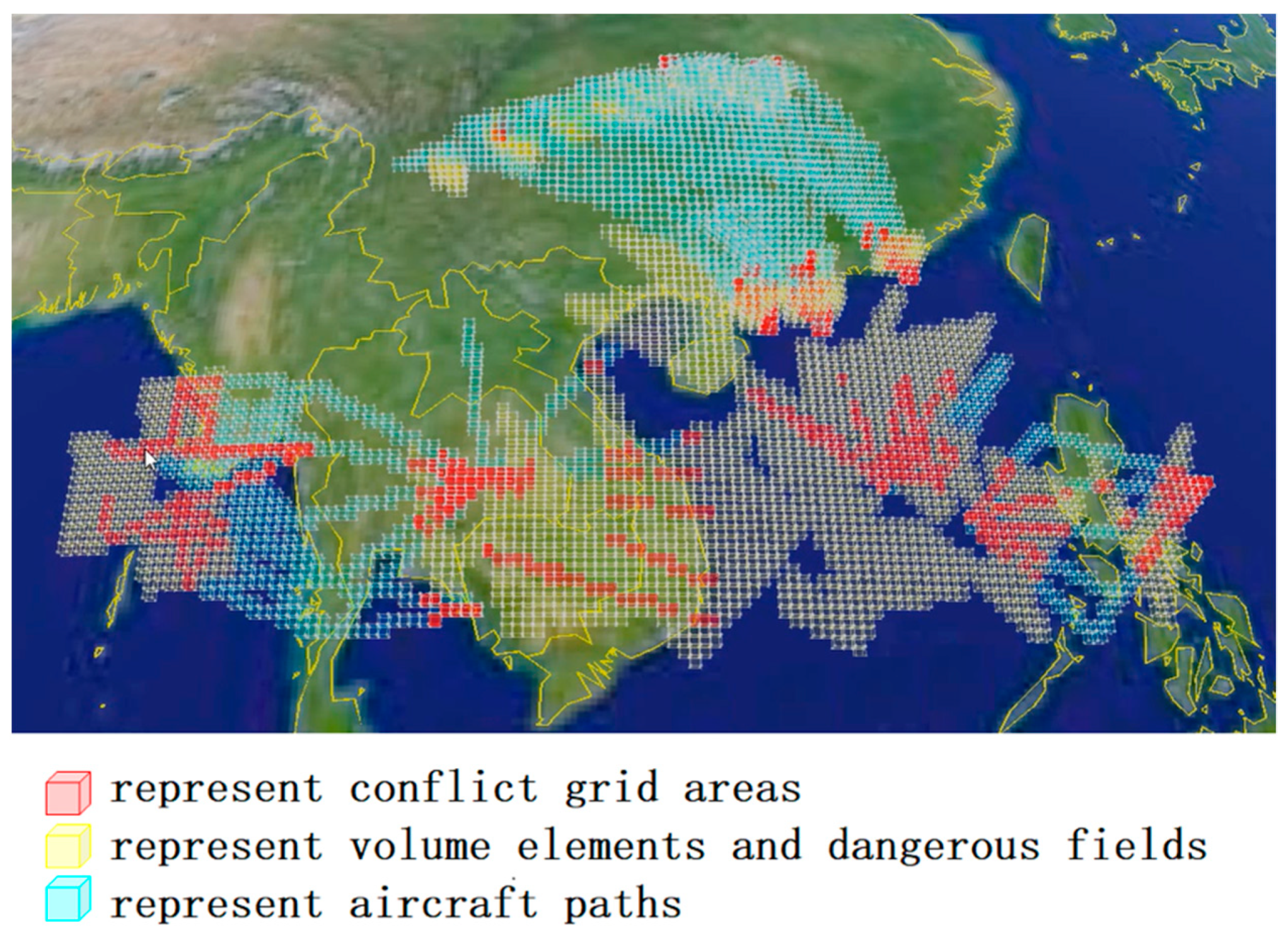
4.2.1. Data Gridding
4.2.2. Creating a Database
4.2.3. Creating a Multiscale Grid Spatiotemporal Index
4.2.4. Flight Conflict Range Search Method Based on the BKD-Tree
4.3. Results and Analysis
5. Conclusions and Future Studies
Author Contributions
Funding
Conflicts of Interest
References
- Zhao, Y.; Wan, J. Analysis of development and evolution rules of civil aviation in China based on life cycle theory. PLoS ONE 2019, 14. [Google Scholar] [CrossRef] [PubMed]
- Gariel, M.; Hansman, R.; Frazzoli, E. Impact of GPS and ADS-B Reported Accuracy on Conflict Detection Performance in Dense Traffic. AIAA J. 2019, 57, 208–222. [Google Scholar] [CrossRef]
- Alam, S.; Shafi, K.; Abbass, H.; Barlow, M. An ensemble approach for conflict detection in free flight by data mining. Transp. Res. Part C 2009, 17, 298–317. [Google Scholar] [CrossRef]
- Jilkov, V.P.; Ledet, J.H.; Li, X.R. Multiple Model Method for Aircraft Conflict Detection and Resolution in Intent and Weather Uncertainty. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1004–1020. [Google Scholar] [CrossRef]
- Ho, F.; Geraldes, R.; Gonçalves, A.; Cavazza, M.; Prendinger, H. Improved Conflict Detection and Resolution for Service UAVs in Shared Airspace. IEEE Trans. Veh. Technol. 2019, 68, 1231–1242. [Google Scholar] [CrossRef]
- Wan, Y.; Tang, J.; Lao, S. Distributed Conflict-Detection and Resolution Algorithms for Multiple UAVs Based on Key-Node Selection and Strategy Coordination. IEEE Access 2019, 7, 42846–42858. [Google Scholar] [CrossRef]
- Bickerstaff, M.A.; Hellestrand, G.R. A highly parallel architecture for real time collision detection in flight simulation. Comput. Graph. 1991, 15, 355–363. [Google Scholar] [CrossRef]
- Chiang, Y.J.; Klosowski, J.T.; Lee, C.; Mitchel, J.S.B. Geometric Algorithms for Conflict Detection and Resolution in Air Traffic Management. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 12 December 1997; IEEE Press: Piscataway, NJ, USA; pp. 1835–1840. [Google Scholar]
- Fulton, N.L. Airspace design: Towards a rigorous specification of conflict complexity based on computational geometry. Aeronaut. J. 2016, 103, 75–84. [Google Scholar] [CrossRef]
- Xing, L.; Songcen, H. Delaunay method for free flight conflict detection. J. Data Acquis. Process. 2002, 17, 446–519. [Google Scholar]
- Zhou, Y.; Suri, S. Analysis of a bounding box heuristic for object intersection. J. Assoc. Comput. Mach. 1999, 46, 833–857. [Google Scholar] [CrossRef]
- Procopiuc, O.; Agarwal, P.; Arge, L.; Vitter, J.S. Bkd-Tree: A Dynamic Scalable kd-Tree. In Proceedings of the International Symposium on Spatial and Temporal Databases, Santorini Island, Greece, 24–27 July 2003; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2003; Volume 2750, pp. 46–65. [Google Scholar] [CrossRef]
- Prandini, M.; Hu, J.; Lygeros, J.; Sastry, S. A probabilistic approach to aircraft conflict detection. IEEE Trans. Intell. Transp. Syst. 2000, 1, 199–220. [Google Scholar] [CrossRef]
- Jardin, M.R. Grid-Based Strategic Air Traffic Conflict Detection: AIAA-2005-5826; AIAA: Reston, VA, USA, 2005. [Google Scholar]
- Hu, J.; Prandini, M.; Sastry, S. Aircraft Conflict Detection in Presence of Spatially Correlated Wind Perturbations: AIAA-2003-5339; AIAA: Reston, VA, USA, 2003. [Google Scholar]
- Sahr, K. Central Place Indexing: Hierarchical Linear Indexing Systems for Mixed-Aperture Hexagonal Discrete Global Grid Systems. Cartogr. Int. J. Geogr. Inf. Geovis. 2019, 54, 16–29. [Google Scholar] [CrossRef]
- Jiang, X.R.; Wen, X.X.; Wu, M.; Wang, Z.; Qiu, X. A SVM Approach of Aircraft Conflict Detection in Free Flight. J. Adv. Transp. 2018, 9, 1–9. [Google Scholar] [CrossRef]
- Sahr, K.; White, D.; Kimerling, A.J. Geodesic discrete global grid systems. Cartogr. Geogr. Inf. Sci. 2003, 30, 121–134. [Google Scholar] [CrossRef]
- Zhao, X.S.; Wang, L.; Wang, H.B.; Li, Y. Modeling methods and basic problems of discrete global grids. Geogr. Geo-Inf. Sci. 2012, 28, 29–34. [Google Scholar]
- Cheng, C.; Tong, X.; Chen, B.; Zhai, W. A Subdivision Method to Unify the Existing Latitude and Longitude Grids. ISPRS Int. J. Geo-Inf. 2016, 5, 161. [Google Scholar] [CrossRef]
- Sun, Z.Q.; Cheng, C.Q. 3D integrated representation model and visualization based on the global discrete voxel—GeoSOT3D. In Proceedings of the 23rd International Conference on Geoinformatics, Wuhan, China, 19–21 June 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Longley, P. Geographic Information Systems and Science; John Wiley & Sons Inc.: West Sussex, UK, 2005. [Google Scholar]
- Ben, J. An Effective Search Scheme for Gnutella-Like P2P Networks. In Proceedings of the 2nd International Workshop on Intelligent Systems and Applications, Wuhan, China, 22–23 May 2010; pp. 1–5. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| One-Scale Subdivision | Multiscale Subdivision | |||||||
|---|---|---|---|---|---|---|---|---|
| 1970-01-01T:00:00Z- | Year | |||||||
| 0 S | 1 S | 2 S | January | February | March | … | December | |
| 1st | 2nd | … | 364th | 365th | ||||
| Database Table Structure | Instructions |
|---|---|
| { “_id”: GeoSOT 3Dcode, “data_exist”:1, “data”:[ { “dataid”:0, “timecode”:01010 010101 110010, “L”:110.470244, “B”:9.000059, “H”:3307.167235, “up”:1500.0, “down”:1500.0, “left”:75.0, “right”:75.0, “v”:197.2, “type”:2, “conflict”:0, “con_type”:1, “OID”:“PLANE2”, “trackid”:“track0” ]} } | geosot code of aircraft tracking, building, etc time code Latitude Longitude Height top of aircraft tracking bottom of aircraft tracking left width of aircraft tracking right width of aircraft tracking speed of aircraft type of aircraft conflict or not conflict type of conflict aircraft ID id of aircraft tracking |
| Database Table Structure | Instructions |
|---|---|
| {“_id”: {“$oid”:“5ae18ec655c45e894619469c”}, “OID”:“PLANE2”, “name”:“J-20”, “crew”:1, “length(m)”:21, “Thrust/Weight”:0.75, “span(m)”:12.8, “height(m)”:6.22, “practicalceiling(m)”:15,500, “Maximum_range(km)”:3650, “wing_area(m*m)”:42.2, “empty_weight(kg)”:14,500, “Maximum_take-off_weight(kg)”:27,415, “Maximum_flying_speed(ma)”:1.7 } | aircraft ID the number of crew wing_area empty_weight Max take-off_weight Maximum_flying_speed |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, S.; Cheng, C.; Zhai, W.; Ren, F.; Zhang, B.; Li, S.; Zhang, J.; Zhang, H. A Low-Altitude Flight Conflict Detection Algorithm Based on a Multilevel Grid Spatiotemporal Index. ISPRS Int. J. Geo-Inf. 2019, 8, 289. https://doi.org/10.3390/ijgi8060289
Miao S, Cheng C, Zhai W, Ren F, Zhang B, Li S, Zhang J, Zhang H. A Low-Altitude Flight Conflict Detection Algorithm Based on a Multilevel Grid Spatiotemporal Index. ISPRS International Journal of Geo-Information. 2019; 8(6):289. https://doi.org/10.3390/ijgi8060289
Chicago/Turabian StyleMiao, Shuangxi, Chengqi Cheng, Weixin Zhai, Fuhu Ren, Bo Zhang, Shuang Li, Junxiao Zhang, and Huangchuang Zhang. 2019. "A Low-Altitude Flight Conflict Detection Algorithm Based on a Multilevel Grid Spatiotemporal Index" ISPRS International Journal of Geo-Information 8, no. 6: 289. https://doi.org/10.3390/ijgi8060289
APA StyleMiao, S., Cheng, C., Zhai, W., Ren, F., Zhang, B., Li, S., Zhang, J., & Zhang, H. (2019). A Low-Altitude Flight Conflict Detection Algorithm Based on a Multilevel Grid Spatiotemporal Index. ISPRS International Journal of Geo-Information, 8(6), 289. https://doi.org/10.3390/ijgi8060289