ADAtools: Automatic Detection and Classification of Active Deformation Areas from PSI Displacement Maps


 , ,
, ,  , ,
, ,  , ,
, ,
Abstract
:1. Introduction
- Ground movements nearby the infrastructure.
- Hydraulic activities nearby the tracks.
- Global supervision for natural hazards.
- Electrical system monitoring.
- Civil engineering structures monitoring.
- Safety monitoring.
2. ADAtools
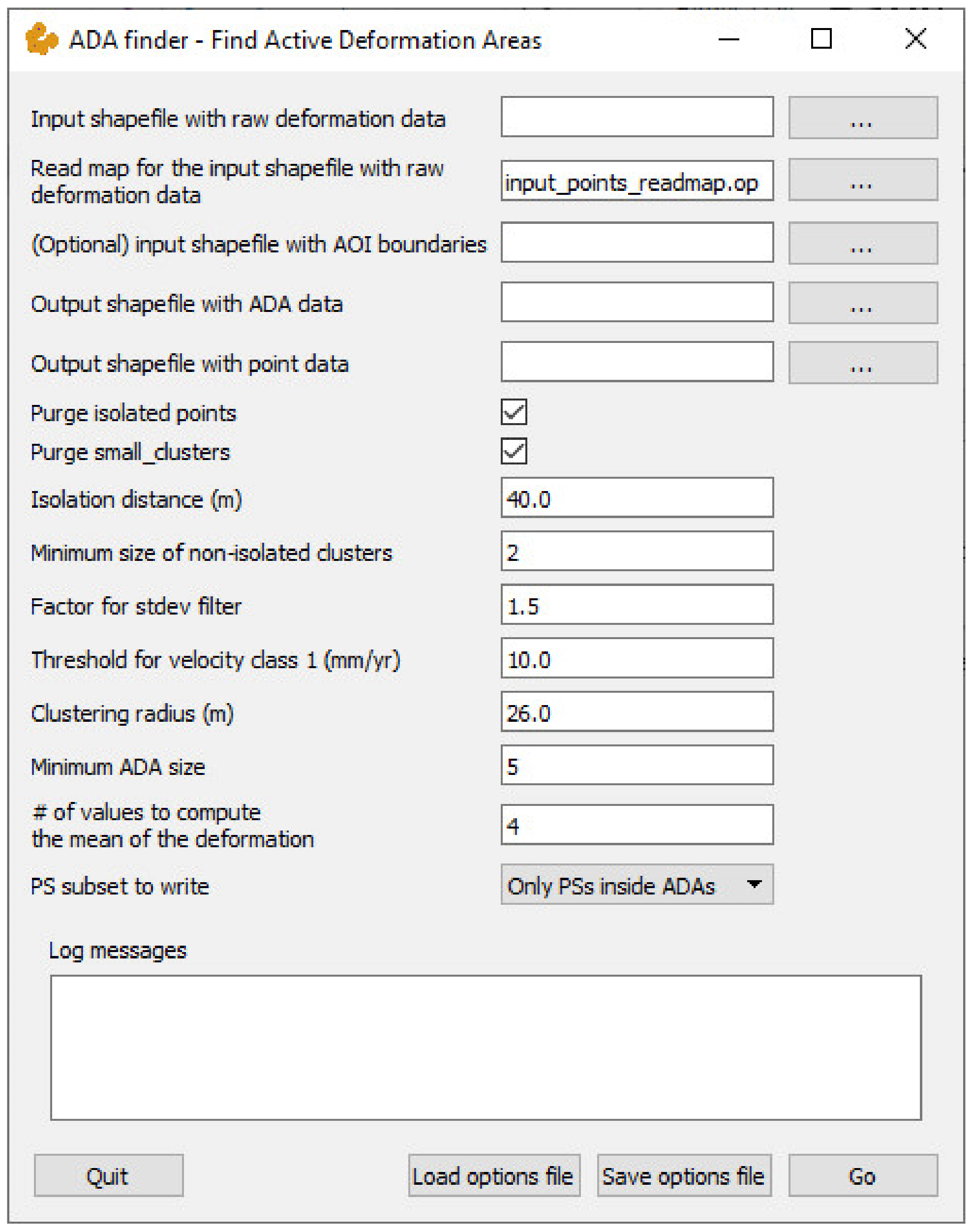
2.1. ADAfinder
- An ESRI shapefile containing the PS that will be used by the detection algorithm. Besides their coordinates, ADAfinder needs some attributes defining the PS; their average velocity expressed in mm/yr, and the deformation time series measuring the movements undergone by these.
- Optionally, the user can upload a polygon to resize the area of interest. All PS in the input shapefile are considered when such a polygon is not provided.
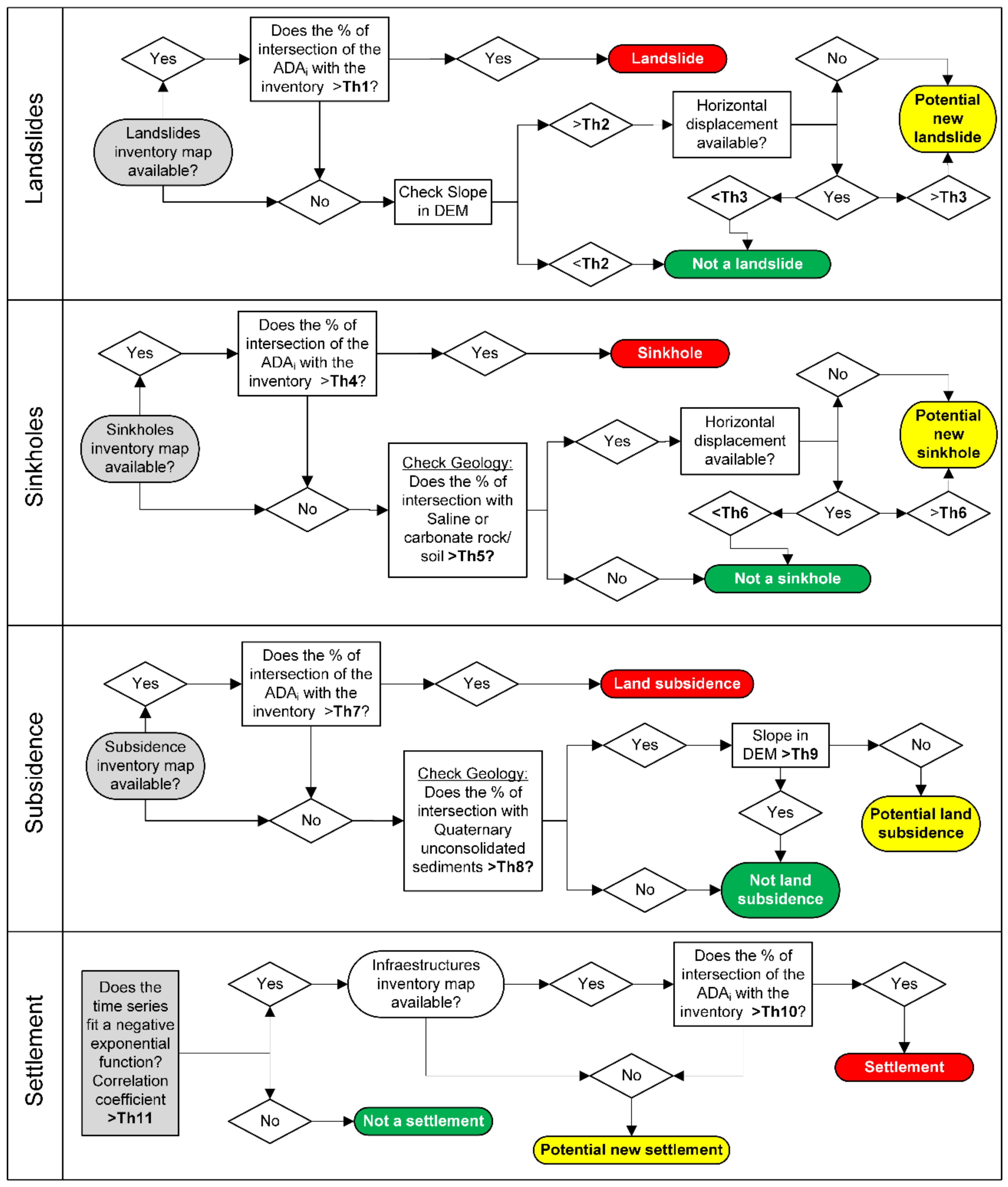
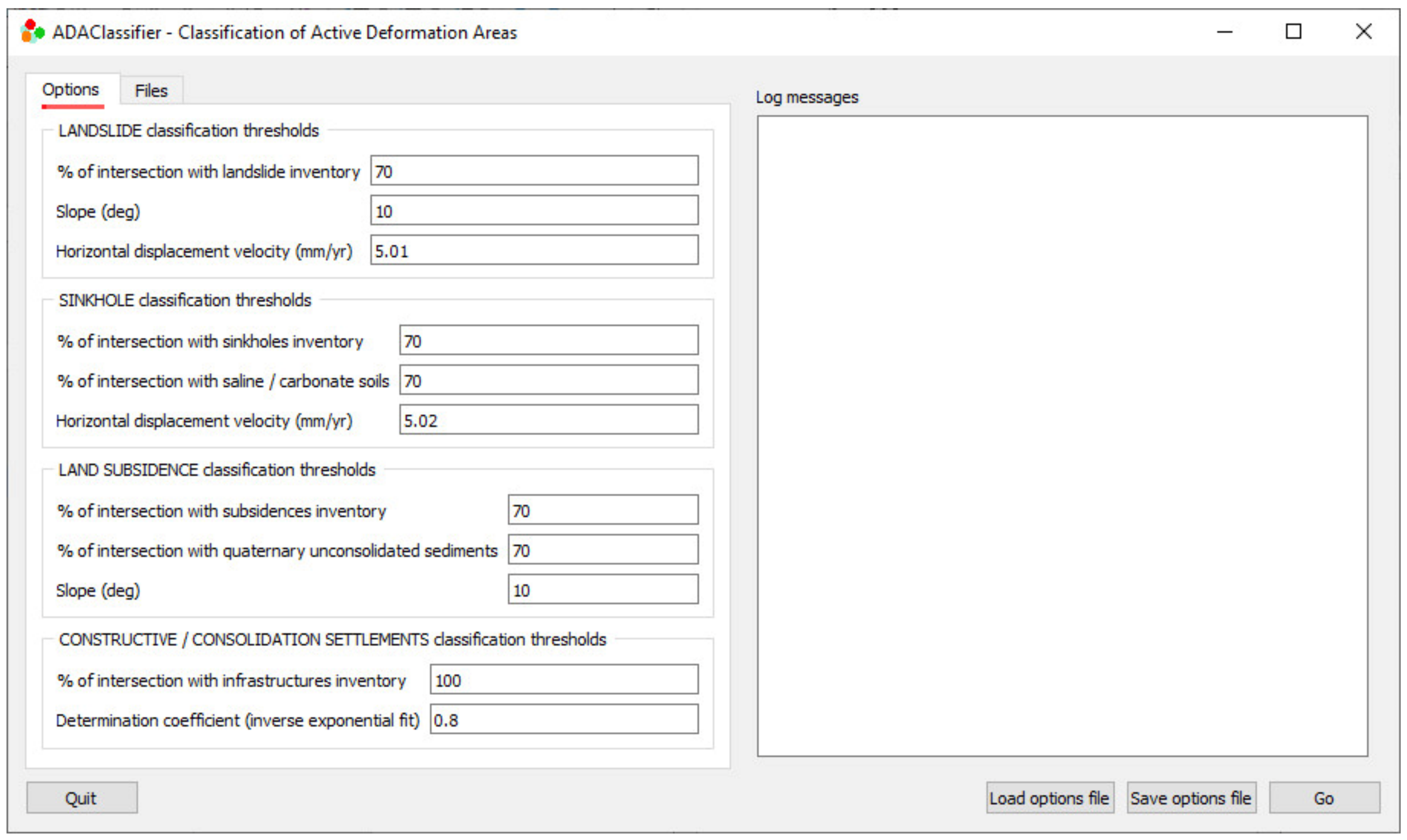
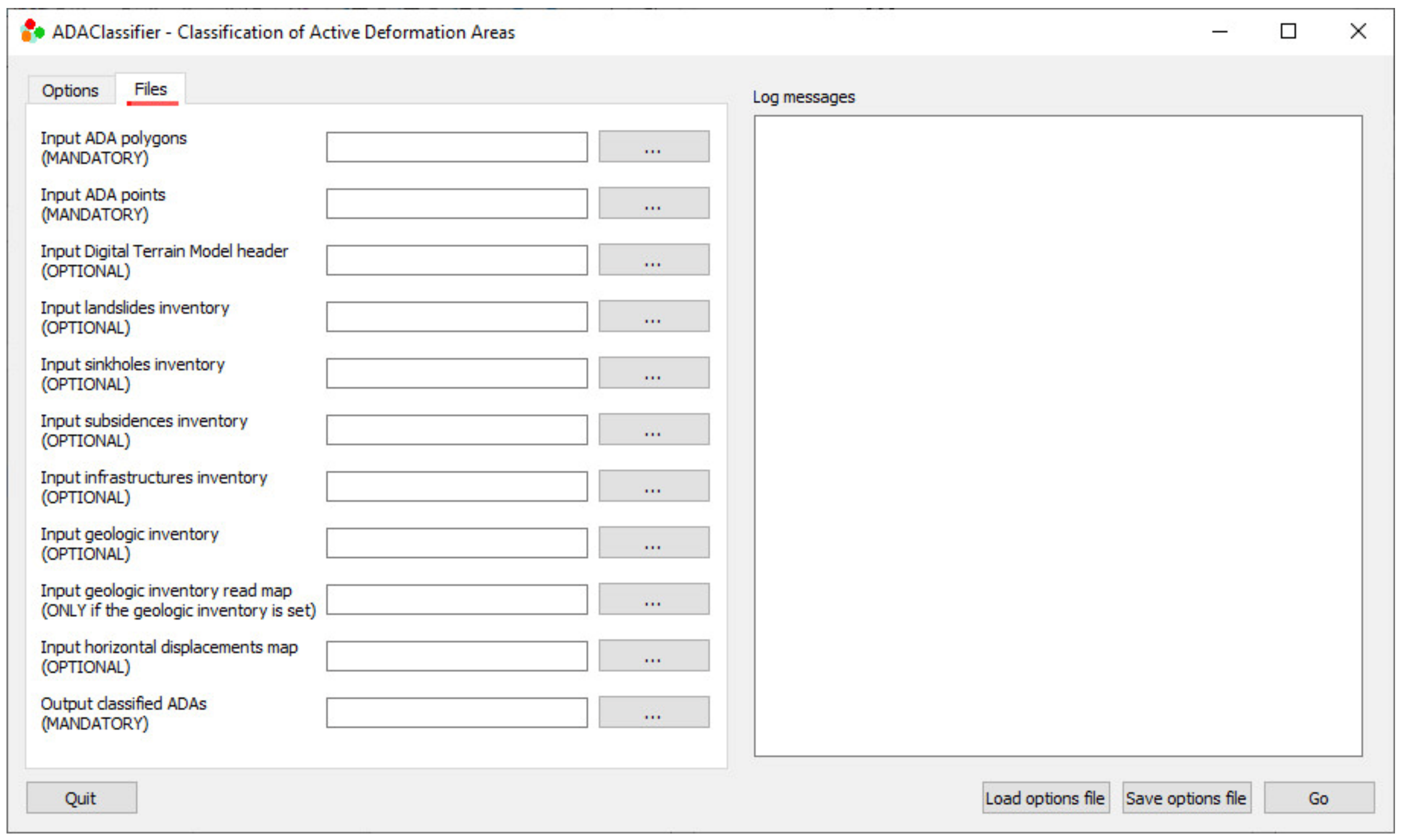
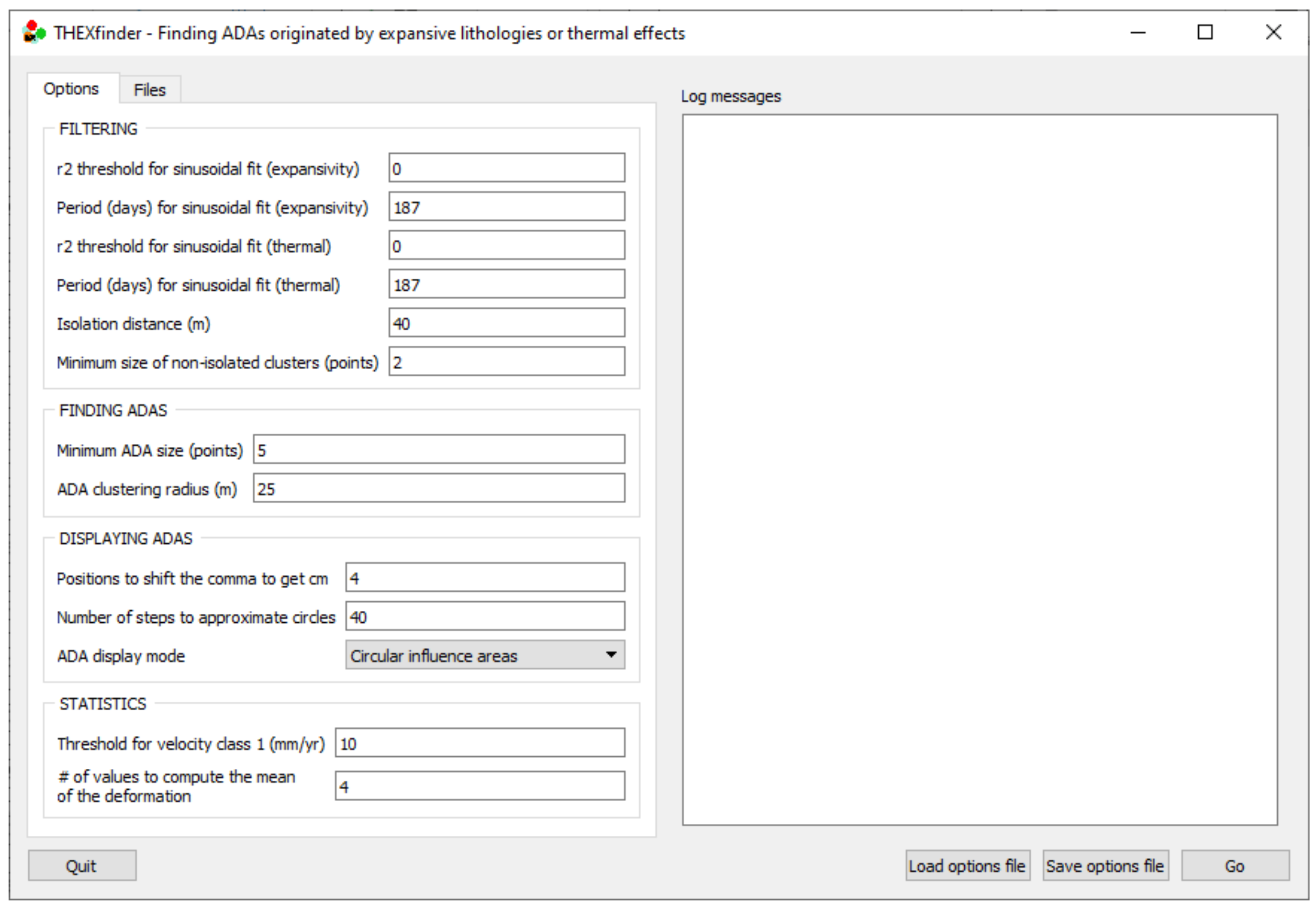
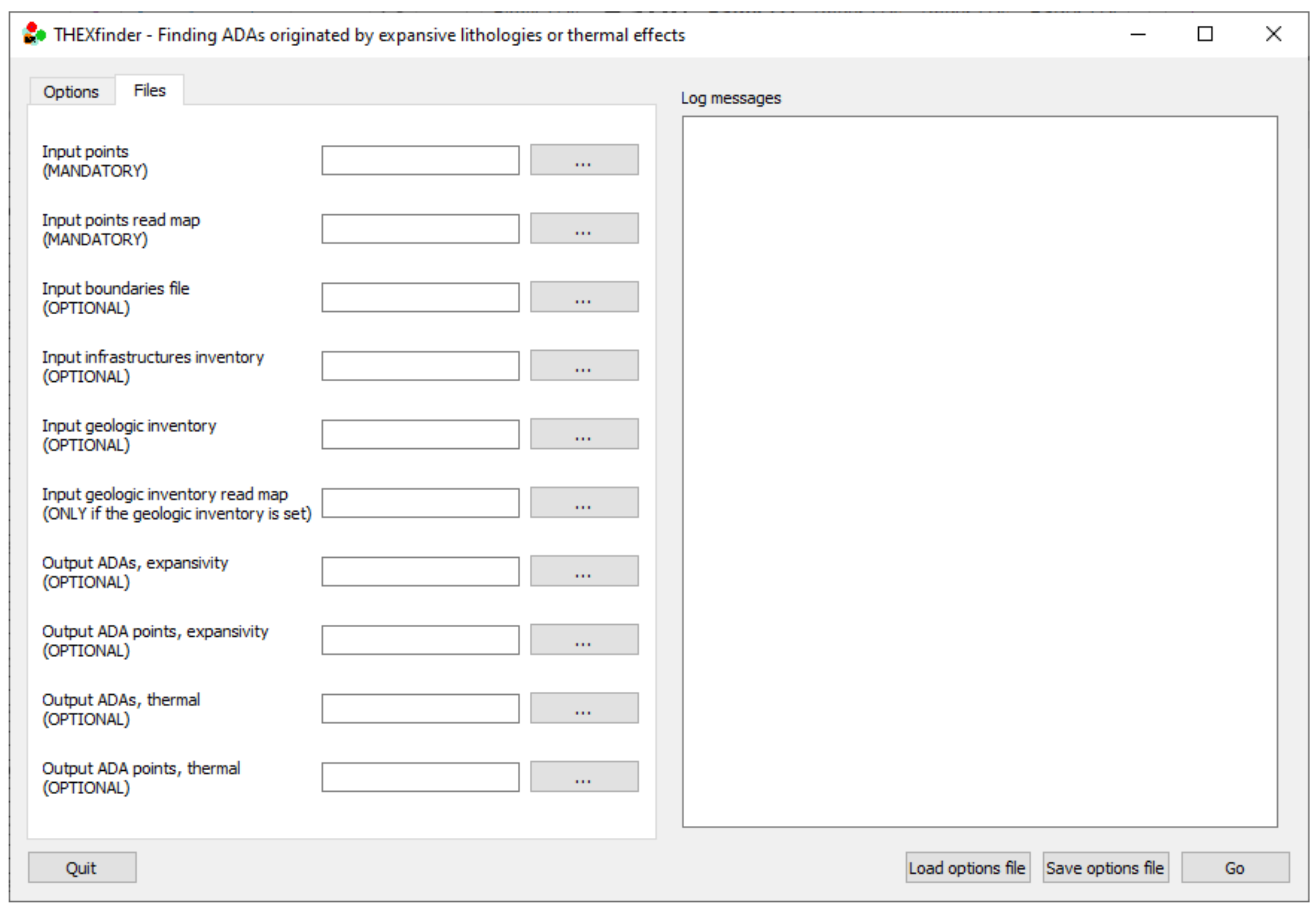
2.2. ADAclassifier and THEXfinder
- The ADA and PS files created by ADAfinder (see Section 2.1). Strictly speaking, these files do not need to be created by ADAfinder; any other tool or manual process identifying ADA may be used instead. However, the set of attributes included in the attribute table of the shapefiles must match those required by ADAclassifier –attributes that ADAfinder does include in its output.
- A digital terrain model (DTM), to compute slopes.
- A series of polygon vector maps (inventories from now on,) in the form of ESRI shapefiles, to check whether an ADA has already been catalogued as belonging to any of the four aforesaid deformation processes. The required inventories are those for landslides, sinkholes, land subsidence, and infrastructures. A geologic map (another polygon vector map) is also needed. In this last case, a read-map file defining how the inventory is structured is also needed to point to the attributes stating the kind of soil covered by each polygon in the inventory. See Section 3.4 for a detailed description about the so-called read-map files.
- An ESRI (polygon) shapefile storing the horizontal component of the movement for the study area. This is the output of los2hv (see Section 2.3 for details).
- The set of parameters—typically thresholds—needed by the different algorithms in charge of the classification processes must be supplied. Examples of such parameters are slopes, determination coefficients to state whether some statistical check is positive, or the minimum percentage of overlap of an ADA and the polygons in some inventory to consider that they do intersect. These thresholds appear as Th1 to Th11 in Figure 3.
- The original set of PS files as well as the read-map file defining the structure of the PSI file (see Section 3.4). Note that, in this case, the tool starts from the original PSI data set, not from the ADA. See the discussion above.
- An optional polygon defining the area of interest (shapefile).
- Optional ESRI shapefiles representing the infrastructures (buildings, bridges, etc.) and geologic inventories. In the case of the geologic map, an extra read-map file is also required.
- The parameters (thresholds) controlling the behavior of the application.
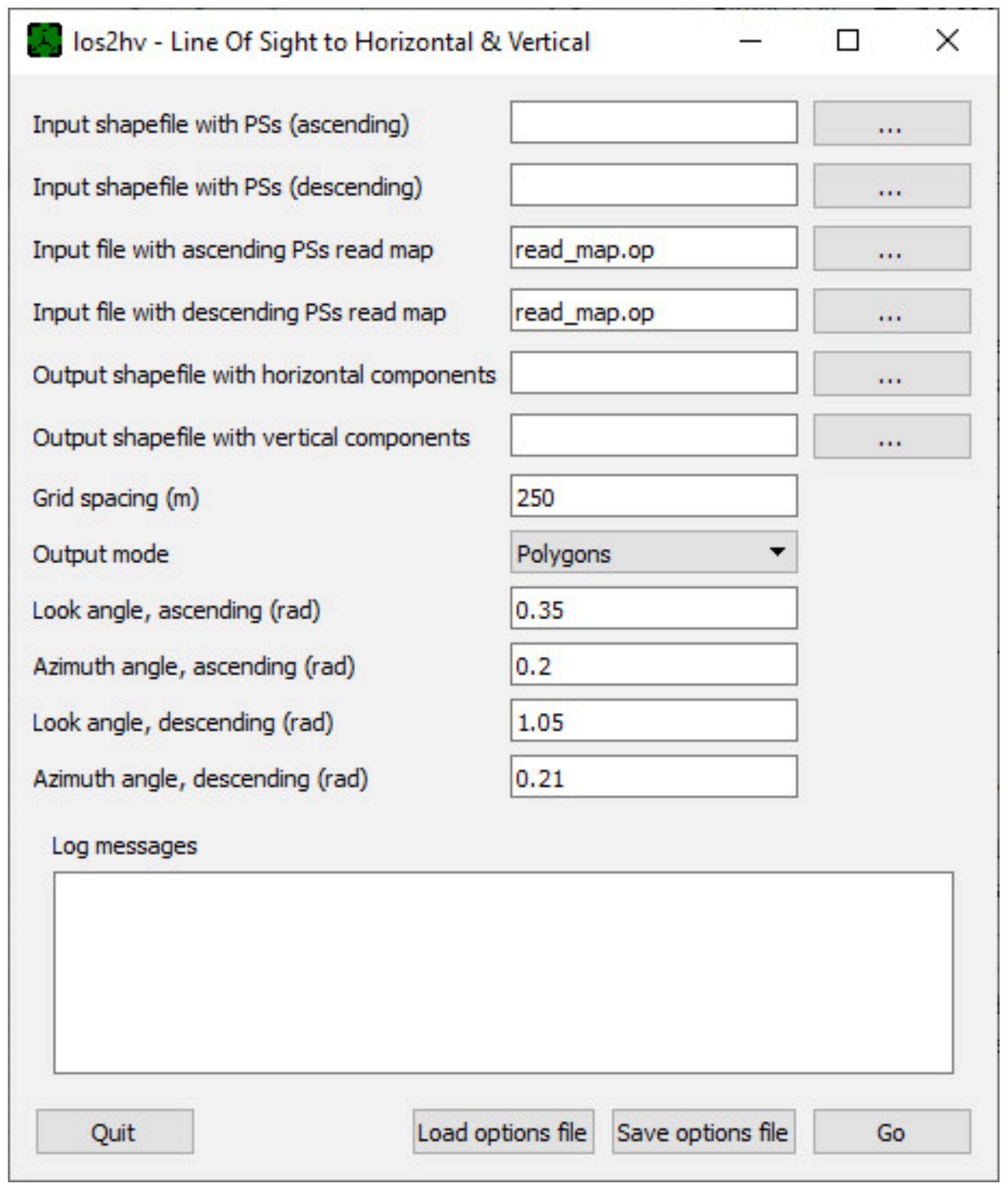
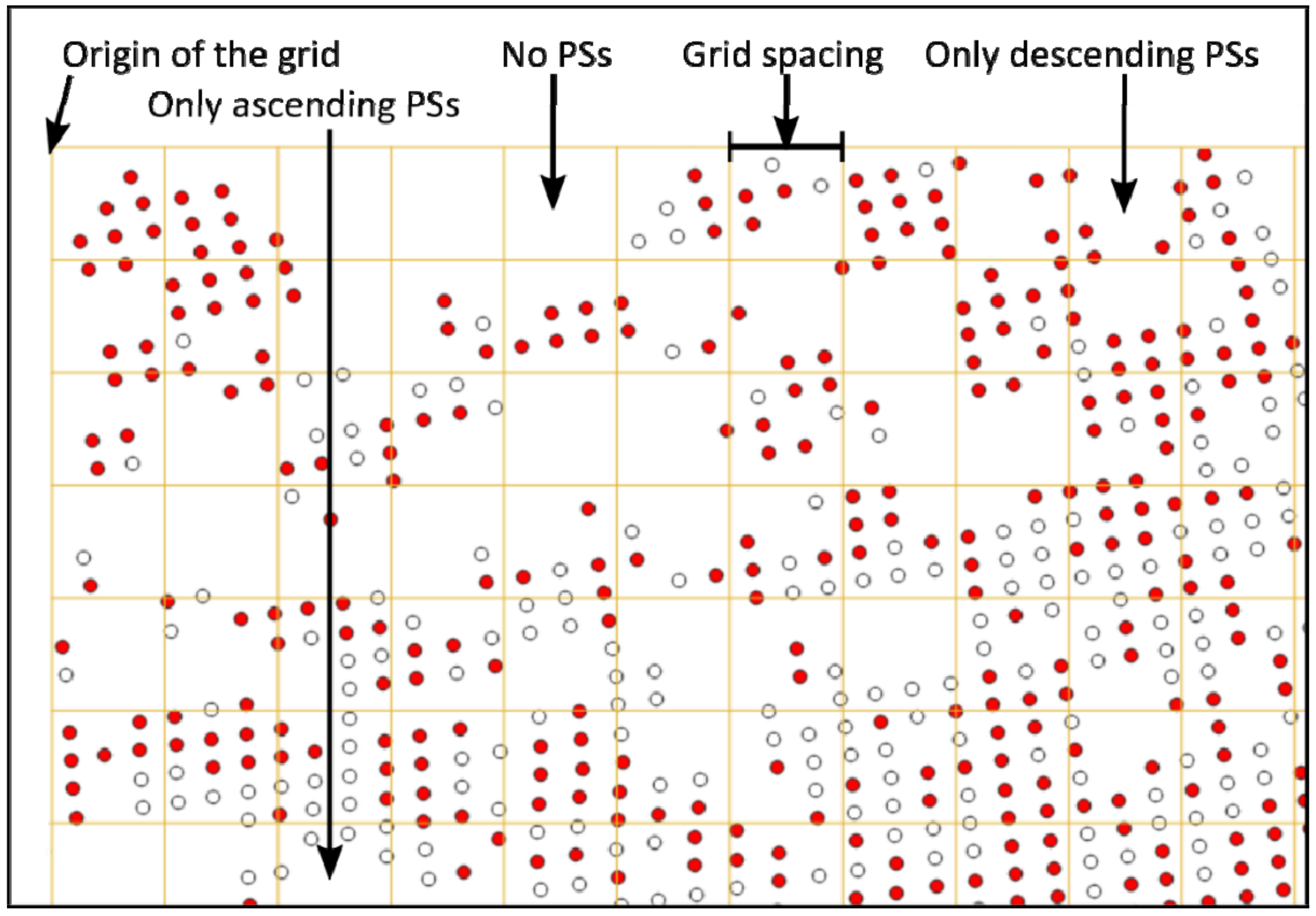
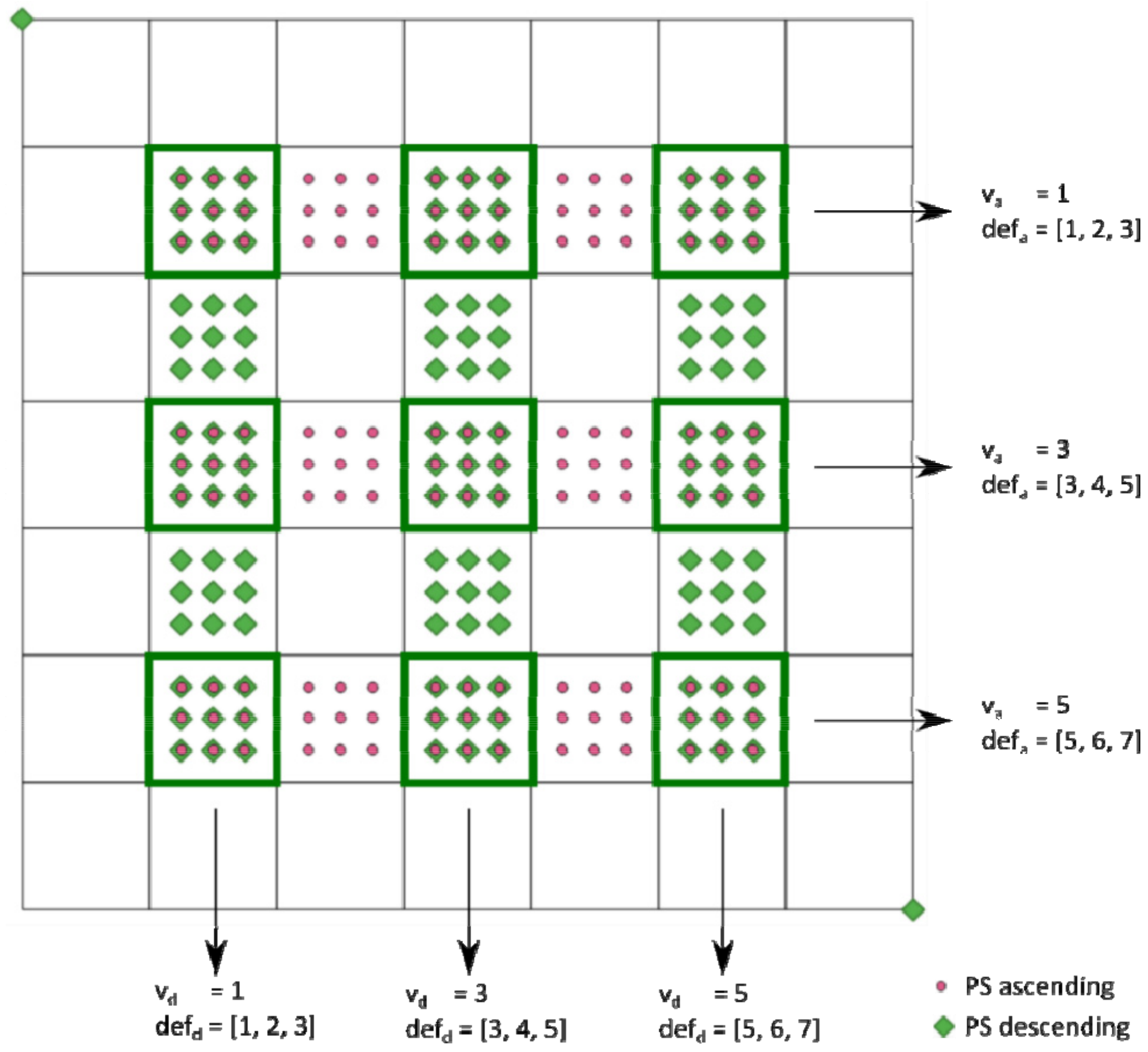
2.3. Los2hv
3. Implementation and Integration
3.1. The Language of Choice
- Qt (see [38]). Although it has been used with several purposes in mind, the main target was to guarantee portability. Since the applications have a GUI, it was very important that such GUI was built using a portable library to avoid the need to write different code for each of the platforms which these tools are targeted at (at least Windows and Linux). Qt is a framework that guarantees such portability; in fact, developing cross-platform applications is its motto.
- Shapelib. This library is a very convenient tool to read and write ESRI shapefiles. See [39] for further details.
- Clipper. A library available for the Delphi, C, C+++ and Python, used for clipping and offsetting lines and polygons. For a complete description of this library, please refer to [40].
3.2. The Three Incarnations
- As a C++ class (one for each application) in a library. Third party (C++) software willing to embed the logic of ADAfinder, ADAclassifier, THEXfinder, or los2hv as a black box only needs to instantiate the corresponding class. Thus, embedding the necessary logic to be able to identify or classify ADA or to compute the horizontal components of the movement is just one procedure call away. Only software components developed in C++ will be able to integrate the logic in the library, since no bindings for other languages have been developed.
- As a command-line utility. This makes possible to integrate these tools in batch workflows, since no human intervention is required to run them. See Section 3.3 for details on options files, the mechanism used to obtain the information controlling the behavior of the applications.
- As an application featuring a GUI. This flavor is the best one for experimenting because of its ease of use. GUI-based applications, however, cannot be integrated in batch workflows.
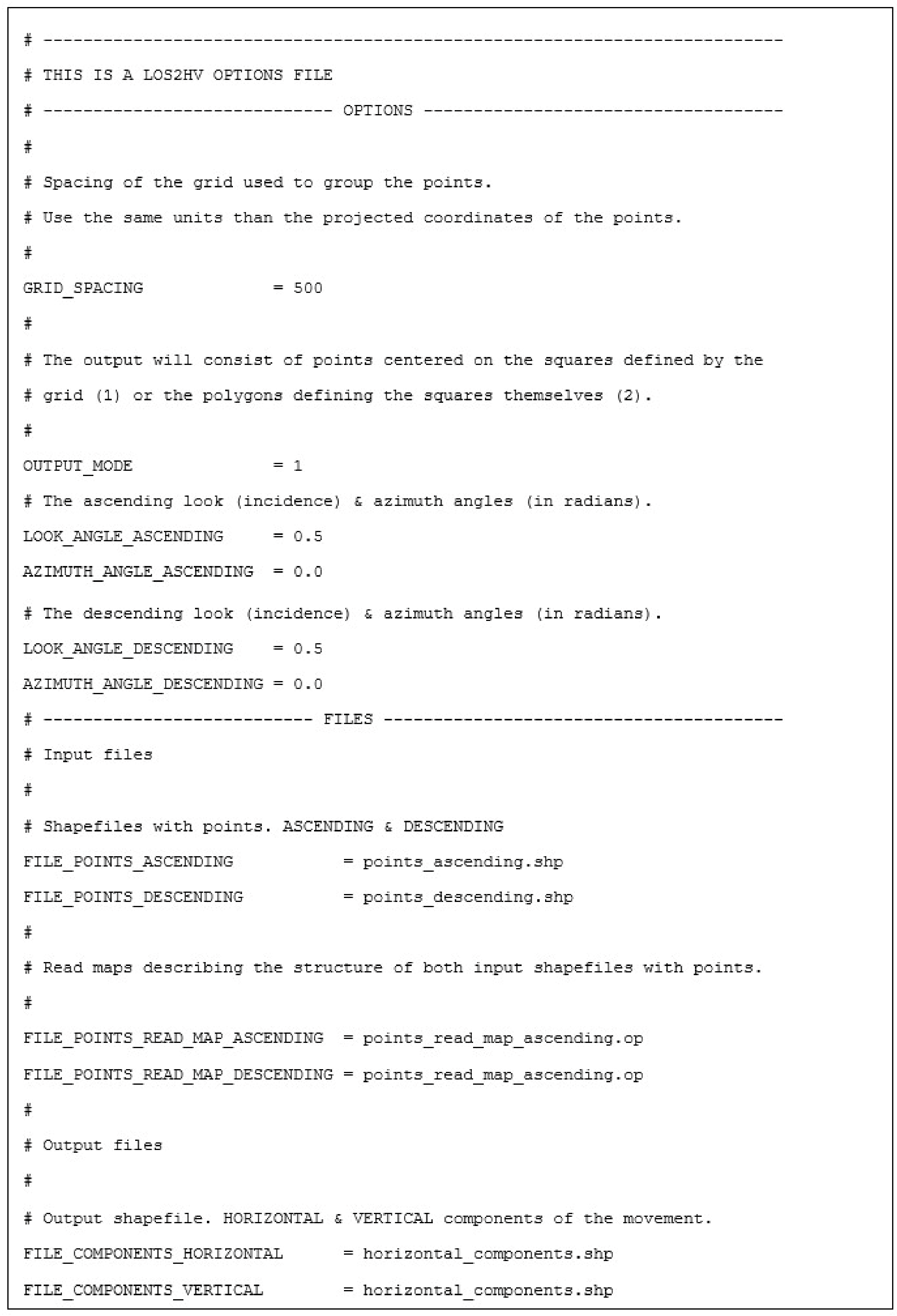
3.3. Option Files
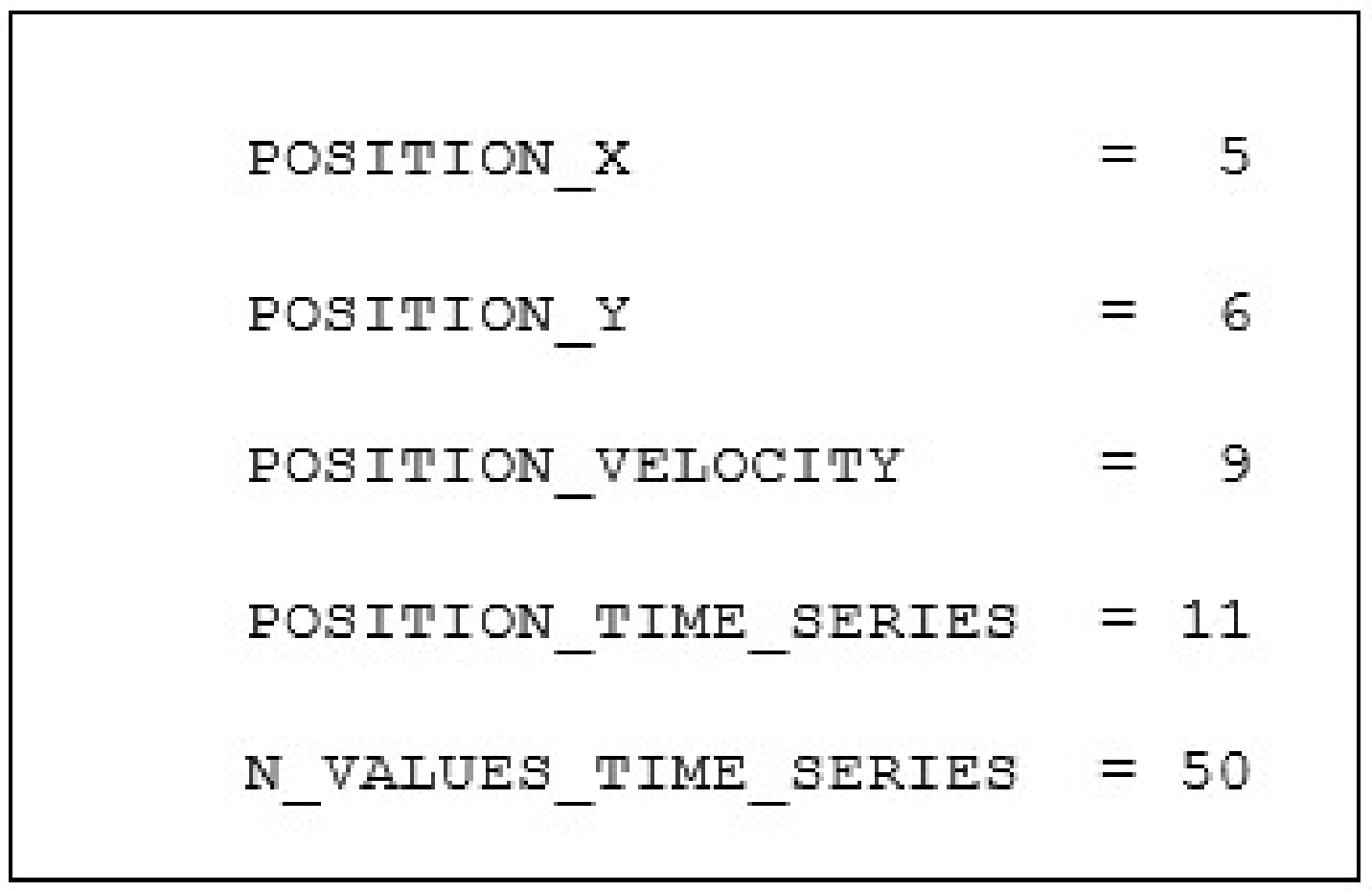
3.4. Real-Life Shapefiles: Read-Map Files
- the x-coordinate of the PS must be read from column 5 in the .dbf file,
- the column to read to obtain the y-coordinate is the sixth one,
- the velocity may be found in column number 9 and, finally,
- the set of values making the time series start at column number 11 and there is a total of 50 of these values.
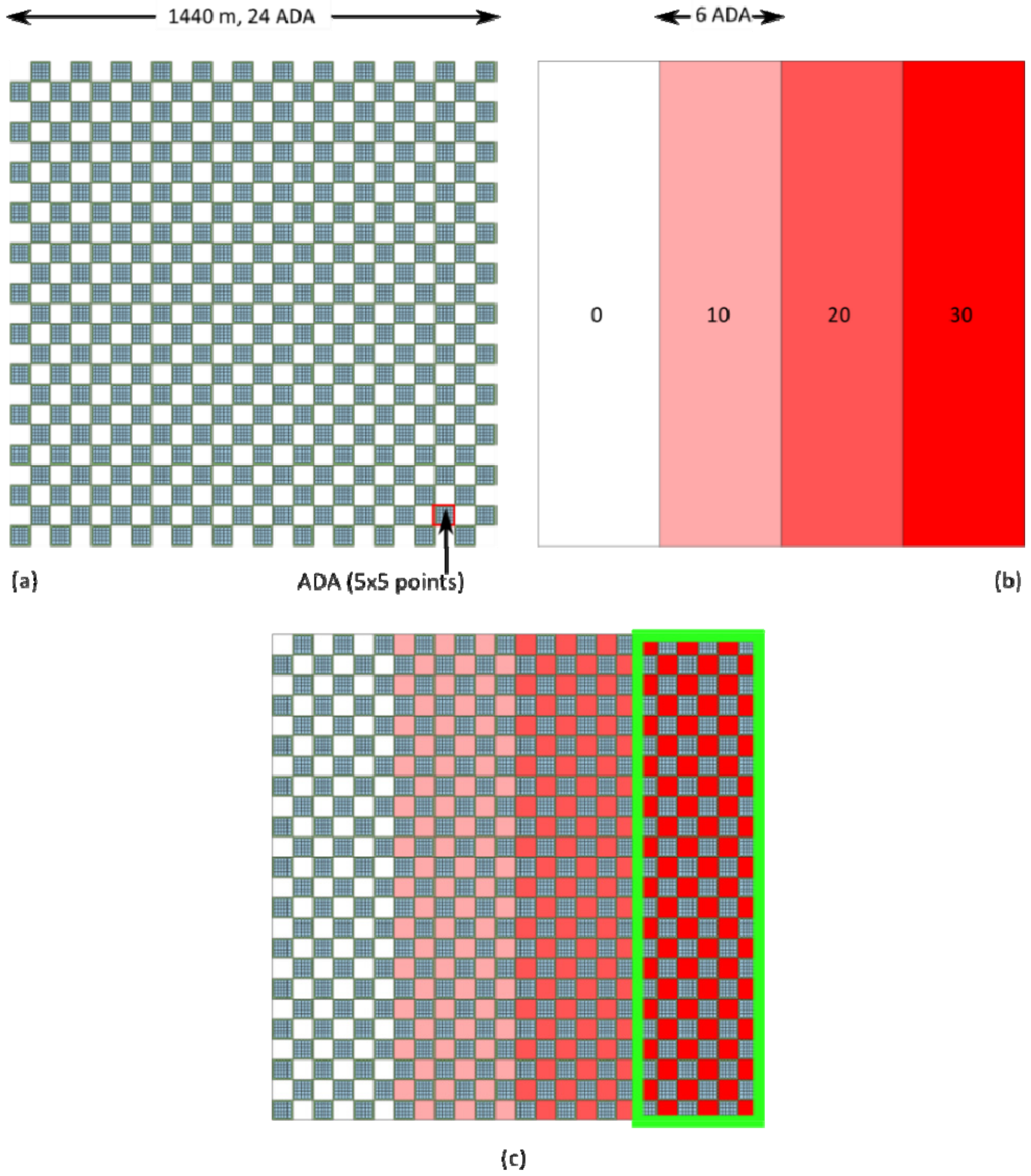
4. Quality Assurance
5. Performance Evaluation
6. Availability
7. Real Test Cases
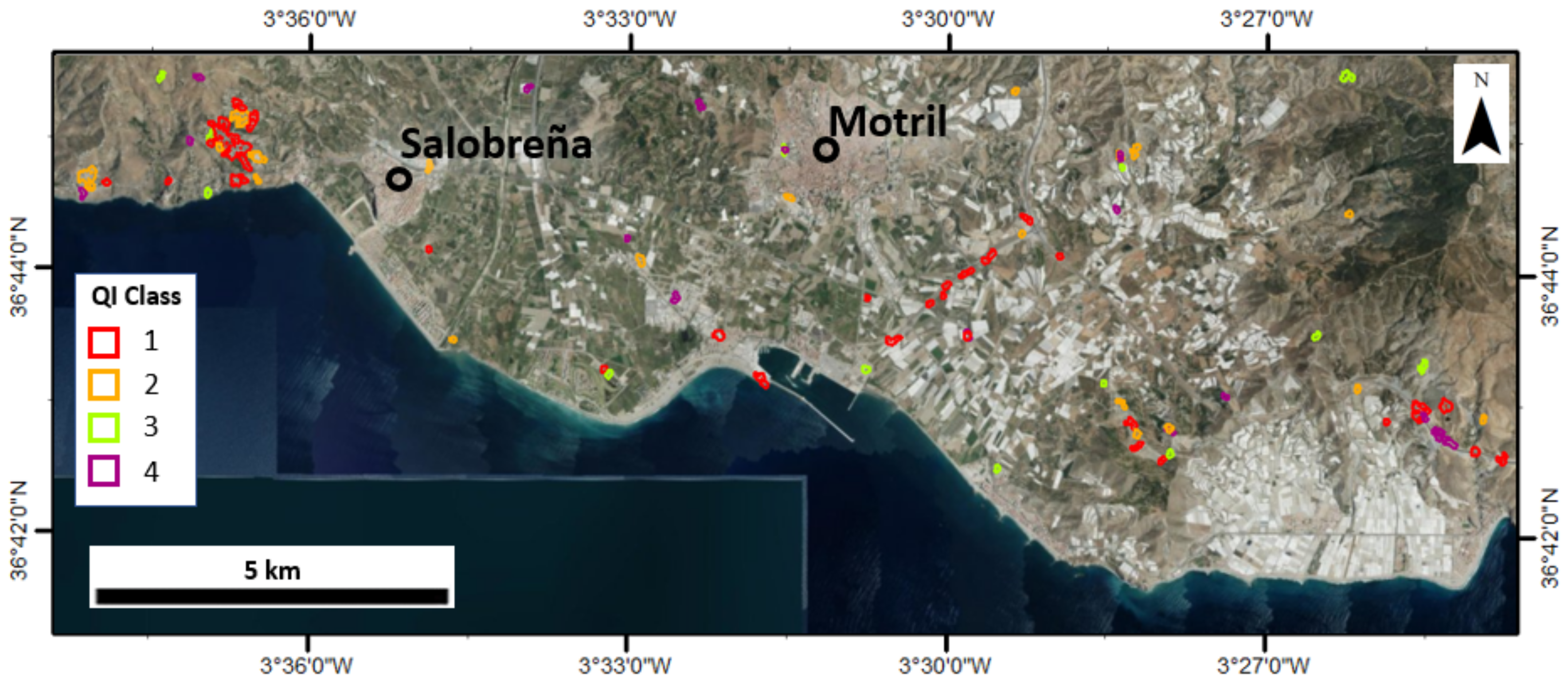
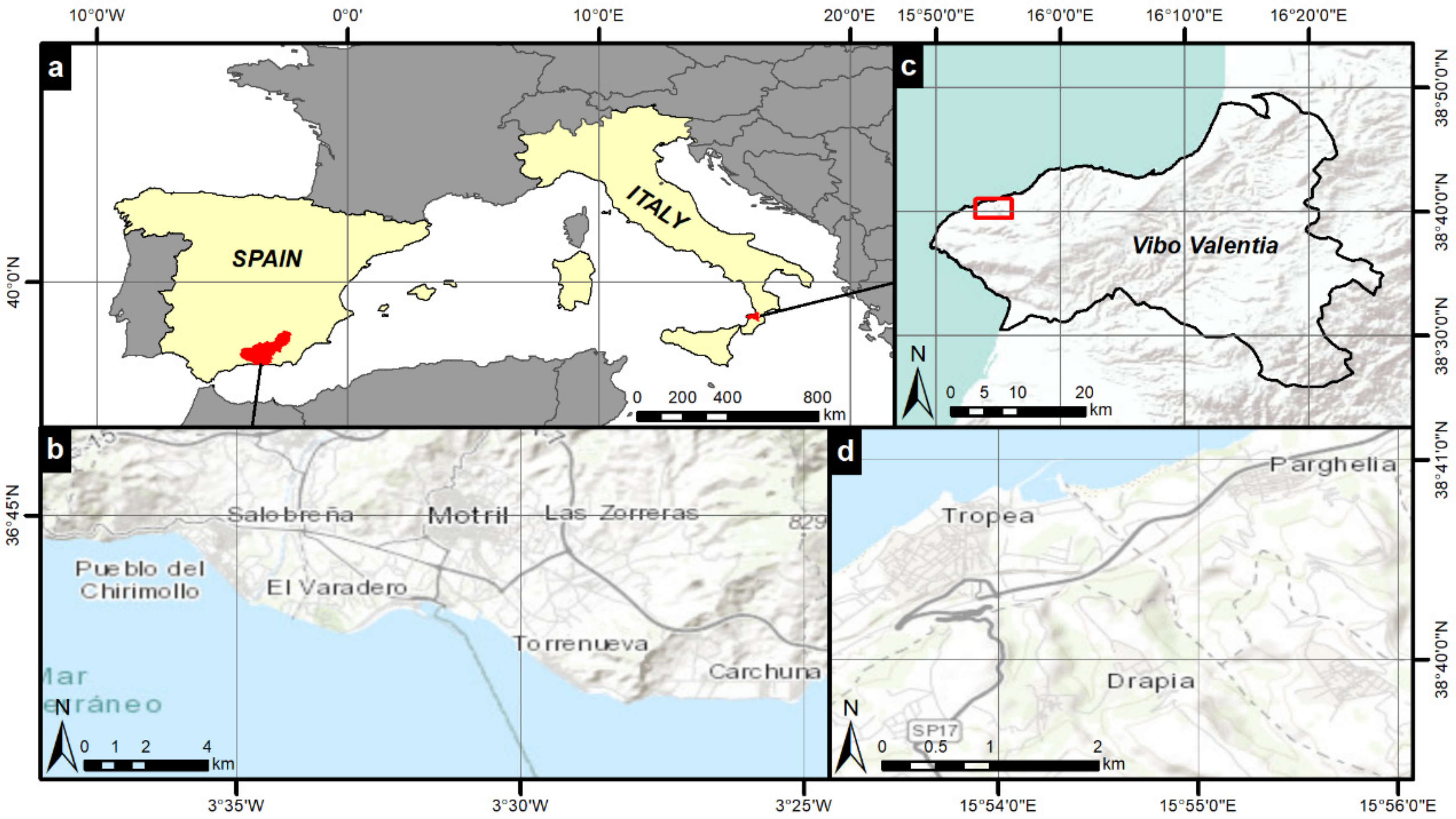
7.1. Southern Spain
7.1.1. Input Data
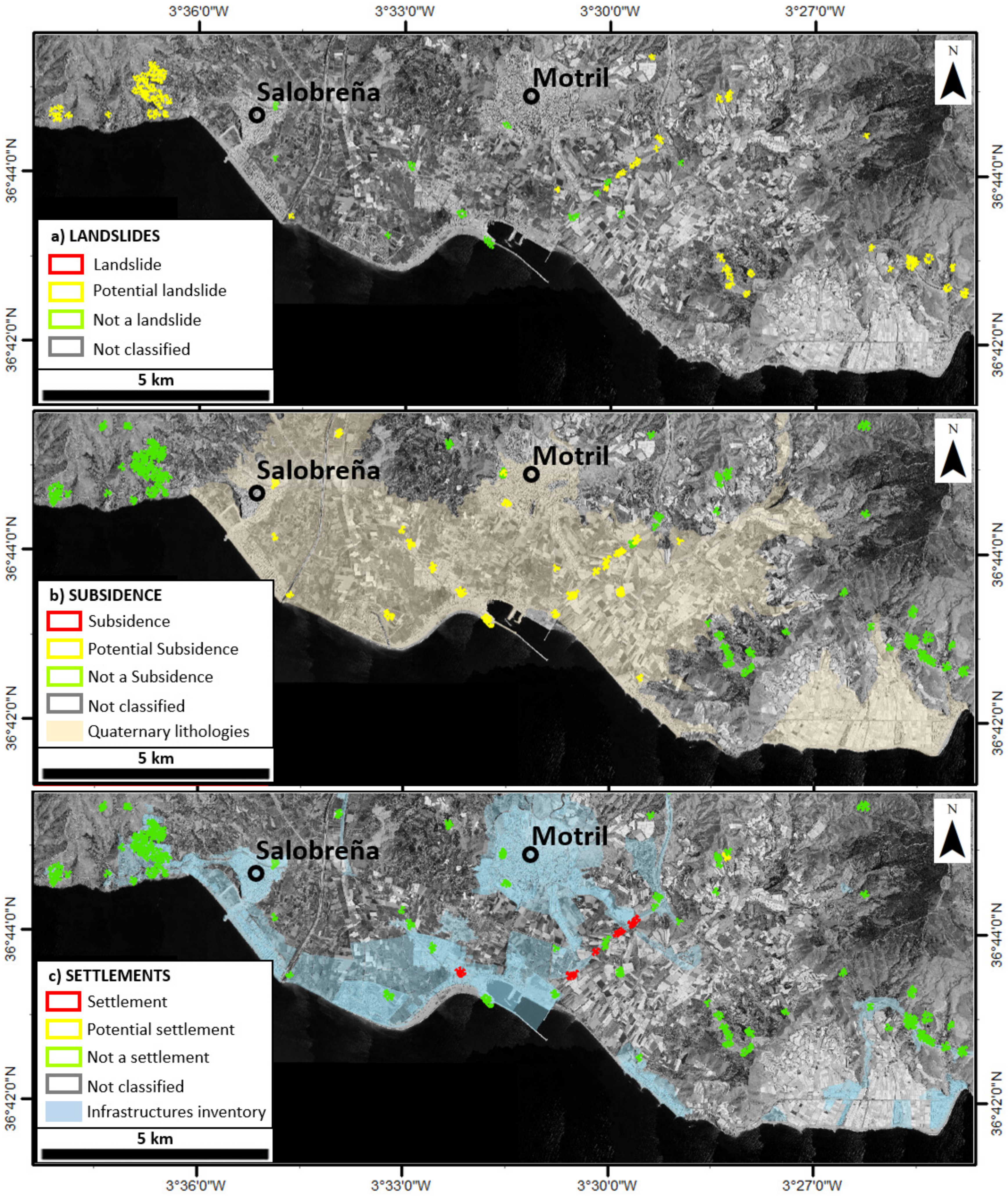
7.1.2. Results
7.2. Southeastern Italy
7.2.1. Input data
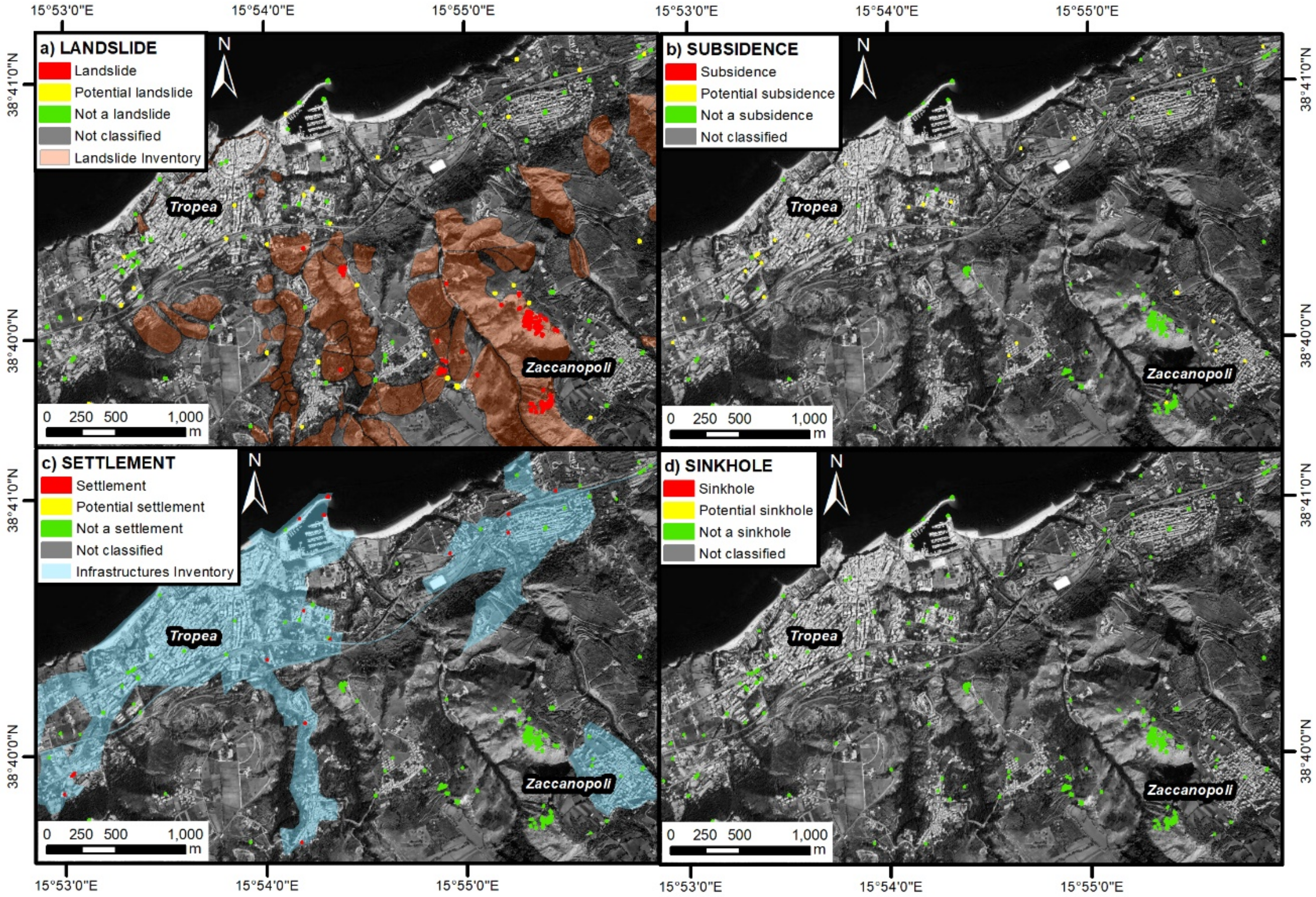
7.2.2. Results
8. Discussion & Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- MOMIT Consortium. Home | MOMIT Project Consortium. Multi-Scale Observation and Monitoring of Railway Infrastructure Threats. Available online: http://www.momit-project.eu/ (accessed on 3 July 2020).
- Crosetto, M.; Monserrat, O.; Cuevas-González, M.; Devanthéry, N.; Crippa, B. Persistent scatterer interferometry: A review. ISPRS J. Photogramm. Remote. Sens. 2016, 115, 78–89. [Google Scholar] [CrossRef] [Green Version]
- Crosetto, M.; Solari, L.; Mróz, M.; Balasis-Levinsen, J.; Casagli, N.; Frei, M.; Oyen, A.; Moldestadk, D.A.; Bateson, L.; Guerrieri, L.; et al. The Evolution of Wide-Area DInSAR: From Regional and National Services to the European Ground Motion Service. Remote Sens. 2020, 12, 2043. [Google Scholar] [CrossRef]
- Costantini, M.; Ferretti, A.; Minati, F.; Falco, S.; Trillo, F.; Colombo, D.; Novali, F.; Malvarosa, F.; Mammone, C.; Vecchioli, F.; et al. Analysis of surface deformations over the whole Italian territory by interferometric processing of ERS, Envisat and COSMO-SkyMed radar data. Remote Sens. Environ. 2017, 202, 250–275. [Google Scholar] [CrossRef]
- Milillo, P.; Perissin, D.; Salzer, J.T.; Lundgren, P.; Lacava, G.; Milillo, G.; Serio, C. Monitoring dam structural health from space: Insights from novel InSAR techniques and multi-parametric modeling applied to the Pertusillo dam Basilicata, Italy. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 221–229. [Google Scholar] [CrossRef]
- Selvakumaran, S.; Plank, S.; Geiß, C.; Rossi, C.; Middleton, C. Remote monitoring to predict bridge scour failure using Interferometric Synthetic Aperture Radar (InSAR) stacking techniques. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 463–470. [Google Scholar] [CrossRef]
- Reyes-Carmona, C.; Barra, A.; Galve, J.P.; Monserrat, O.; Pérez-Peña, J.V.; Mateos, R.M.; Notti, D.; Ruano, P.; Millares, A.; López-Vinielles, J.; et al. Sentinel-1 DInSAR for Monitoring Active Landslides in Critical Infrastructures: The Case of the Rules Reservoir (Southern Spain). Remote Sens. 2020, 12, 809. [Google Scholar] [CrossRef] [Green Version]
- Solari, L.; Del Soldato, M.; Raspini, F.; Barra, A.; Bianchini, S.; Confuorto, P.; Casagli, N.; Crosetto, M. Review of Satellite Interferometry for Landslide Detection in Italy. Remote Sens. 2020, 12, 1351. [Google Scholar] [CrossRef]
- Frattini, P.; Crosta, G.B.; Rossini, M.; Allievi, J. Activity and kinematic behaviour of deep-seated landslides from PS-InSAR displacement rate measurements. Landslides 2018, 15, 1053–1070. [Google Scholar] [CrossRef]
- Zhang, Y.; Meng, X.; Jordan, C.; Novellino, A.; Dijkstra, T.; Chen, G. Investigating slow-moving landslides in the Zhouqu region of China using InSAR time series. Landslides 2018, 15, 1299–1315. [Google Scholar] [CrossRef]
- Ciampalini, A.; Solari, L.; Giannecchini, R.; Galanti, Y.; Moretti, S. Evaluation of subsidence induced by long-lasting buildings load using InSAR technique and geotechnical data: The case study of a Freight Terminal (Tuscany, Italy). Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101925. [Google Scholar] [CrossRef]
- Zhou, C.; Gong, H.; Zhang, Y.; Warner, T.A.; Wang, C. Spatiotemporal evolution of land subsidence in the Beijing plain 2003–2015 using persistent scatterer interferometry (PSI) with multi-source SAR data. Remote Sens. 2018, 10, 552. [Google Scholar] [CrossRef] [Green Version]
- Tosi, L.; Lio, C.D.; Teatini, P.; Strozzi, T. Land subsidence in coastal environments: Knowledge advance in the Venice Coastland by TerraSAR-X. PSI. Remote Sens. 2018, 10, 1191. [Google Scholar] [CrossRef] [Green Version]
- Malinowska, A.A.; Witkowski, W.T.; Hejmanowski, R.; Chang, L.; van Leijen, F.J.; Hanssen, R.F. Sinkhole occurrence monitoring over shallow abandoned coal mines with satellite-based persistent scatterer interferometry. Eng. Geol. 2019, 262, 105336. [Google Scholar] [CrossRef]
- Theron, A.; Engelbrecht, J. The role of earth observation, with a focus on SAR Interferometry, for sinkhole hazard assessment. Remote Sens. 2018, 10, 1506. [Google Scholar] [CrossRef] [Green Version]
- Baer, G.; Magen, Y.; Nof, R.N.; Raz, E.; Lyakhovsky, V.; Shalev, E. InSAR measurements and viscoelastic modeling of sinkhole precursory subsidence: Implications for sinkhole formation, early warning, and sediment properties. J. Geophys. Res. Earth Surf. 2018, 123, 678–693. [Google Scholar] [CrossRef]
- Cheloni, D.; De Novellis, V.; Albano, M.; Antonioli, A.; Anzidei, M.; Atzori, S.; Avallone, A.; Bignami, D.; Bonano, M.; Calcaterra, S.; et al. Geodetic model of the 2016 Central Italy earthquake sequence inferred from InSAR and GPS data. Geophys. Res. Lett. 2017, 44, 6778–6787. [Google Scholar] [CrossRef]
- Moro, M.; Saroli, M.; Stramondo, S.; Bignami, C.; Albano, M.; Falcucci, E.; Gori, S.; Doglioni, C.; Polcari, M.; Tallini, M.; et al. New insights into earthquake precursors from InSAR. Sci. Rep. 2017, 7, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Fang, J.; Xu, C.; Wen, Y.; Wang, S.; Xu, G.; Zhao, Y.; Yi, L. The 2018 Mw 7.5 Palu earthquake: A supershear rupture event constrained by InSAR and broadband regional seismograms. Remote Sens. 2019, 11, 1330. [Google Scholar] [CrossRef] [Green Version]
- Di Traglia, F.; Nolesini, T.; Solari, L.; Ciampalini, A.; Frodella, W.; Steri, D.; Benedetto, A.; Rindi, A.; Marini, L.; Monni, N.; et al. Lava delta deformation as a proxy for submarine slope instability. Earth Planet. Sci. Lett. 2018, 488, 46–58. [Google Scholar] [CrossRef]
- Schaefer, L.N.; Di Traglia, F.; Chaussard, E.; Lu, Z.; Nolesini, T.; Casagli, N. Monitoring volcano slope instability with Synthetic Aperture Radar: A review and new data from Pacaya (Guatemala) and Stromboli (Italy) volcanoes. Earth Sci. Rev. 2019, 192, 236–257. [Google Scholar] [CrossRef]
- Anantrasirichai, N.; Biggs, J.; Albino, F.; Hill, P.; Bull, D. Application of machine learning to classification of volcanic deformation in routinely generated InSAR data. J. Geophys. Res. Earth 2018, 123, 6592–6606. [Google Scholar] [CrossRef] [Green Version]
- Bakon, M.; Czikhardt, R.; Papco, J.; Barlak, J.; Rovnak, M.; Adamisin, P.; Perissin, D. remotIO: A Sentinel-1 Multi-Temporal InSAR Infrastructure Monitoring Service with Automatic Updates and Data Mining Capabilities. Remote Sens. 2020, 12, 1892. [Google Scholar] [CrossRef]
- Raspini, F.; Bianchini, S.; Ciampalini, A.; Del Soldato, M.; Solari, L.; Novali, F.; del Conte, S.; Rucci, A.; Ferretti, A.; Casagli, N. Continuous, semi-automatic monitoring of ground deformation using Sentinel-1 satellites. Sci. Rep. 2018, 8, 1–11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Navarro, J.A.; Cuevas-González, M.; Tomás, R.; Barra, A.; Crosetto, M. A toolset to detect and classify Active Deformation Areas using interferometric SAR data. In Proceedings of the 5th International Conference on Geographic Information Systems, Theory, Applications and Management (GISTAM 2019), Crete, Greece, 3–6 May 2019. [Google Scholar]
- Barra, A.; Solari, L.; Béjar-Pizarro, M.; Montserrat, O.; Bianchini, S.; Herrera, G.; Crosetto, M.; Sarro, R.; González-Alonso, E.; Mateos, R.M.; et al. A methodology to detect and update Active Deformation Areas based on Sentinel-1 SAR images. Remote Sens. 2017, 9, 1002. [Google Scholar] [CrossRef] [Green Version]
- Tomás, R.; Pagán, J.I.; Navarro, J.A.; Cano, M.; Pastor, J.L.; Riquelme, A.; Cuevas-González, M.; Crosetto, M.; Barra, A.; Monserrat, O.; et al. Semi-Automatic Identification and Pre-Screening of Geological–Geotechnical Deformational Processes Using Persistent Scatterer Interferometry Datasets. Remote Sens. 2019, 11, 1675. [Google Scholar] [CrossRef] [Green Version]
- Solari, L.; Barra, A.; Herrera, G.; Bianchini, S.; Monserrat, O.; Béjar-Pizarro, M.; Crosetto, M.; Sarro, R.; Moretti, S. Fast detection of ground motions on vulnerable elements using Sentinel-1 InSAR data. Geomat. Nat. Hazards Risk 2018, 9, 152–174. [Google Scholar] [CrossRef] [Green Version]
- Solari, L.; Bianchini, S.; Franceschini, R.; Barra, A.; Monserrat, O.; Thuegaz, P.; Bertolo, D.; Crosetto, M.; Catani, F. Satellite interferometric data for landslide intensity evaluation in mountainous regions. Int. J. Appl. Earth Obs. Geoinf. 2020, 87, 102028. [Google Scholar] [CrossRef]
- Aslan, G.; Foumelis, M.; Raucoules, D.; De Michele, M.; Bernardie, S.; Cakir, Z. Landslide Mapping and Monitoring Using Persistent Scatterer Interferometry (PSI) Technique in the French Alps. Remote Sens. 2020, 12, 1305. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Monti-Guarnieri, A.; Prati, C.; Rocca, F.; Massonet, D. InSAR Principles-Guidelines for SAR Interferometry Processing and Interpretation, TM-19; ESA Publications: Auckland, New Zealand, 2007. [Google Scholar]
- Tomás, R.; Cano, M.; Pastor, J.L.; Riquelme, A. Automatic Classification of Active Deformation Areas. MOMIT Project Technical Note 2018. Available online: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT_technical_note_%20Automatic%20classification%20of%20Active%20Deformation%20Areas.pdf (accessed on 3 July 2020).
- Navarro, J.A.; Cuevas, M. ADAfinder-A Tool to Automate the Detection of Active Deformation Areas. MOMIT Project Technical Note. Available online: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT_technical_note_ADAfinder%20documentation.pdf (accessed on 3 July 2020).
- Navarro, J.A.; Cuevas, M.; Crosetto, M. ADAclassifier-Classify ADAs Automatically. MOMIT Project Technical Note. Available online: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT_technical_note_ADAClassifier%20documentation.pdf (accessed on 3 July 2020).
- He, L.; Wu, L.; Liu, S.; Wang, Z.; Su, C.; Liu, S.-N. Mapping Two-Dimensional Deformation Field Time-Series of Large Slope by Coupling DInSAR-SBAS with MAI-SBAS. Remote Sens. 2015, 7, 12440–12458. [Google Scholar] [CrossRef] [Green Version]
- Notti, D.; Herrera, G.; Bianchini, S.; Meisina, S.; García-Davalillo, J.C.; Zucca, F. A methodology for improving landslide PSI data analysis. Int. J. Remote Sens. 2014, 35, 2186–2214. [Google Scholar] [CrossRef]
- Navarro, J.A.; Cuevas, M. los2hv-Compute Horizontal and Vertical Components of the Movement. MOMIT Project Technical Note. Available online: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT_technical_note_los2hv%20documentation.pdf (accessed on 3 July 2020).
- The Qt Company. Qt | Cross-platform software development for embedded & desktop. Available online: https://www.qt.io/ (accessed on 3 July 2020).
- Warmerdam, F. Shapelib C Library. Available online: http://shapelib.maptools.org/ (accessed on 3 July 2020).
- Johnson, A. Clipper–An Open Source Freeware Polygon Clipping Library. Available online: http://www.angusj.com/delphi/clipper.php (accessed on 3 July 2020).
- King, D.E. Dlib-ml: A Machine Learning Toolkit. J. Mach. Learn. Res. 2010, 10, 1755–1758. [Google Scholar]
- Guennebaud, G.; Benoît, J. Eigen v3. Available online: http://eigen.tuxfamily.org (accessed on 3 July 2020).
- Navarro, J.A.; Cuevas, M.; Crosetto, M. SW Data Processing Components Test Plan. MOMIT Project Deliverable. Available online: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT%20-%20D3.3%20-%20SW%20data%20processing%20components%20test%20plan.pdf (accessed on 3 July 2020).
- Navarro, J.A.; Tomás, R.; Cuevas, M.; Crosetto, M. SW Data Processing Components Test Report. MOMIT Project Deliverable. Available online: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT%20-%20D3.4%20-%20SW%20data%20processing%20components%20test%20report_v1.0.1.pdf (accessed on 3 July 2020).
- Devanthéry, N.; Crosetto, M.; Monserrat, O.; Cuevas-González, M.; Crippa, B. An approach to Persistent Scatterer Interferometry. Remote Sens. 2014, 6, 6662–6679. [Google Scholar] [CrossRef] [Green Version]
- Notti, D.; Galve, J.P.; Mateos, R.M.; Monserrat, O.; Lamas-Fernández, F.; Fernández-Chacón, F.; Roldán-García, F.J.; Pérez-Peña, J.V.; Crosetto, M.; Azañón, J.M. Human-induced coastal landslide reactivation. Monitoring by PSInSAR techniques and urban damage survey (SE Spain). Landslides 2015, 12, 1007–1014. [Google Scholar] [CrossRef]
- Galve, J.P.; Pérez-Peña, J.V.; Azañón, J.M.; Closson, D.; Caló, F.; Reyes-Carmona, C.; Jabaloy, A.; Ruano, P.; Mateos, R.M.; Notti, D.; et al. Evaluation of the SBAS InSAR service of the European space Agency’s Geohazard Exploitation Platform (GEP). Remote Sens. 2017, 9, 1291. [Google Scholar] [CrossRef] [Green Version]
- Chacón, J.; Alameda-Hernández, P.; Chacón, E.; Delgado, J.; El Hamdouni, R.; Fernández, P.; Fernández, T.; Gómez-López, J.M.; Irigaray, C.; Jiménez-Perálvarez, J.; et al. The Calaiza landslide on the coast of Granada (Andalusia, Spain). Bull. Eng. Geol. Environ. 2019, 78, 2107–2124. [Google Scholar] [CrossRef]
- Costantini, M.; Falco, S.; Malvarosa, F.; Minati, F.; Trillo, F.; Vecchioli, F. Persistent Scatterer Pair Interferometry: Approach and Application to COSMO-SkyMed SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2869–2879. [Google Scholar] [CrossRef]
- Ietto, F.; Perri, F.; Fortunato, G. Lateral spreading phenomena and weathering processes from the Tropea area (Calabria, southern Italy). Environ. Earth Sci. 2015, 73, 4595–4608. [Google Scholar] [CrossRef]
- Bianchini, S.; Moretti, S. Analysis of recent ground subsidence in the Sibari plain (Italy) by means of satellite SAR interferometry-based methods. Int. J. Remote Sens. 2015, 36, 4550–4569. [Google Scholar] [CrossRef]
- Raspini, F.; Cigna, F.; Moretti, S. Multi-temporal mapping of land subsidence at basin scale exploiting Persistent Scatterer Interferometry: Case study of Gioia Tauro plain (Italy). J. Maps 2012, 8, 514–524. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tool. | Dataset | Time (s) |
|---|---|---|
| ADAfinder | 20,351 PS | 2 |
| ADAfinder | 926,916 PS | 179 |
| los2hv | 2 (ascending, descending) × 135 PS. Grid: 7 × 7 tesserae | 55 |
| ADAclassifier | 144 ADA, 3600 PS Between 4 - 8 polygons per inventory DTM with 14411441 z values | 125 |
| Dataset | # ADA | # Active PS | Area ADA (m2) | Landslide | Subsidence | Settlement | Sinkhole | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Avg | Min | Max | Avg | Min | Max | C | P | N | C | P | N | C | P | N | C | P | N | ||
| Southern Spain | |||||||||||||||||||
| ASC | 53 | 19 | 5 | 255 | 13,216 | 3620 | 134,852 | 0 | 41 | 12 | 0 | 17 | 36 | 6 | 1 | 46 | 0 | 0 | 35 |
| Southeast Italy | |||||||||||||||||||
| ASC | 38 | 8 | 5 | 23 | 92.2 | 52.0 | 312.3 | 7 | 6 | 25 | 0 | 14 | 24 | 2 | 0 | 36 | 0 | 0 | 38 |
| DESC | 133 | 11 | 5 | 97 | 124.8 | 51.4 | 704.8 | 66 | 20 | 47 | 0 | 28 | 105 | 13 | 0 | 120 | 0 | 0 | 133 |
| TOTAL | 73 | 26 | 72 | 0 | 42 | 129 | 15 | 0 | 156 | 0 | 0 | 171 | |||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navarro, J.A.; Tomás, R.; Barra, A.; Pagán, J.I.; Reyes-Carmona, C.; Solari, L.; Vinielles, J.L.; Falco, S.; Crosetto, M. ADAtools: Automatic Detection and Classification of Active Deformation Areas from PSI Displacement Maps. ISPRS Int. J. Geo-Inf. 2020, 9, 584. https://doi.org/10.3390/ijgi9100584
Navarro JA, Tomás R, Barra A, Pagán JI, Reyes-Carmona C, Solari L, Vinielles JL, Falco S, Crosetto M. ADAtools: Automatic Detection and Classification of Active Deformation Areas from PSI Displacement Maps. ISPRS International Journal of Geo-Information. 2020; 9(10):584. https://doi.org/10.3390/ijgi9100584
Chicago/Turabian StyleNavarro, J. A., R. Tomás, A. Barra, J. I. Pagán, C. Reyes-Carmona, L. Solari, J. L. Vinielles, S. Falco, and M. Crosetto. 2020. "ADAtools: Automatic Detection and Classification of Active Deformation Areas from PSI Displacement Maps" ISPRS International Journal of Geo-Information 9, no. 10: 584. https://doi.org/10.3390/ijgi9100584
APA StyleNavarro, J. A., Tomás, R., Barra, A., Pagán, J. I., Reyes-Carmona, C., Solari, L., Vinielles, J. L., Falco, S., & Crosetto, M. (2020). ADAtools: Automatic Detection and Classification of Active Deformation Areas from PSI Displacement Maps. ISPRS International Journal of Geo-Information, 9(10), 584. https://doi.org/10.3390/ijgi9100584