A Topology Preserving Gridding Method for Vector Features in Discrete Global Grid Systems

Abstract
:1. Introduction
2. Related Work
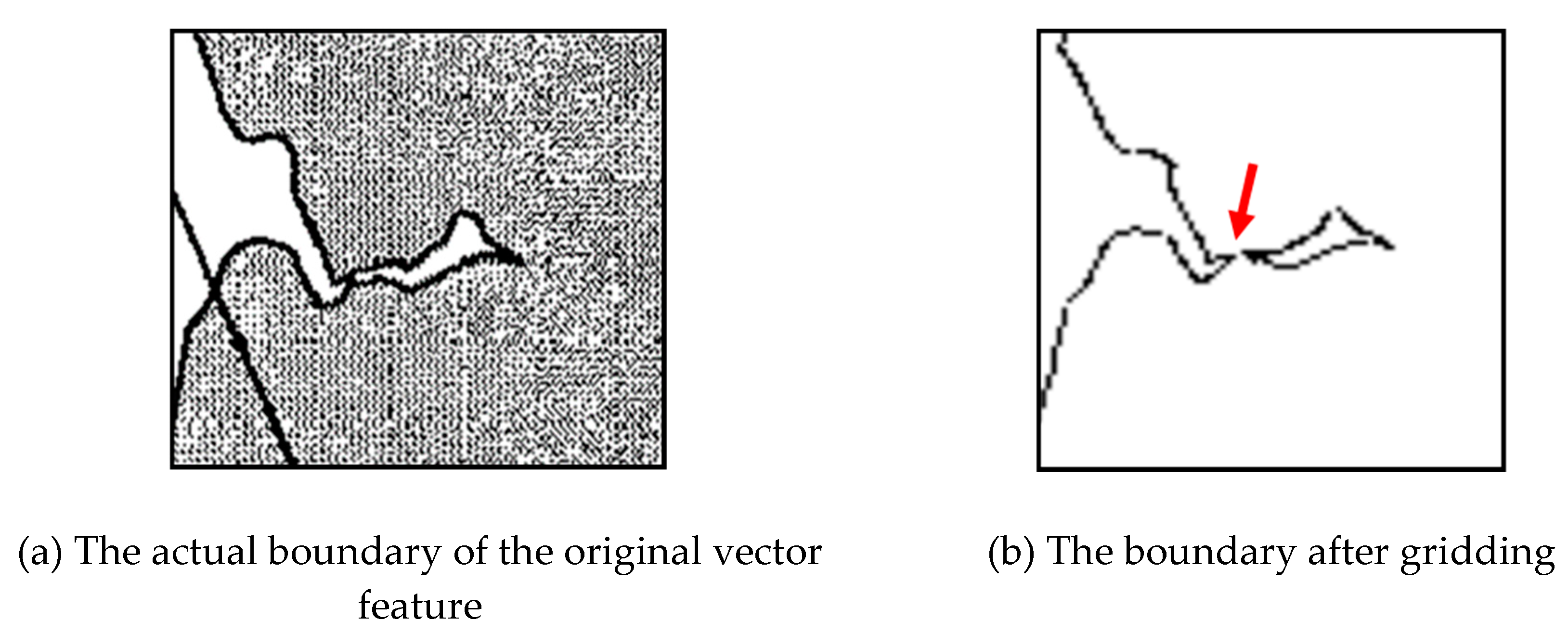
3. Basic Idea
4. Topological Distortion Classification
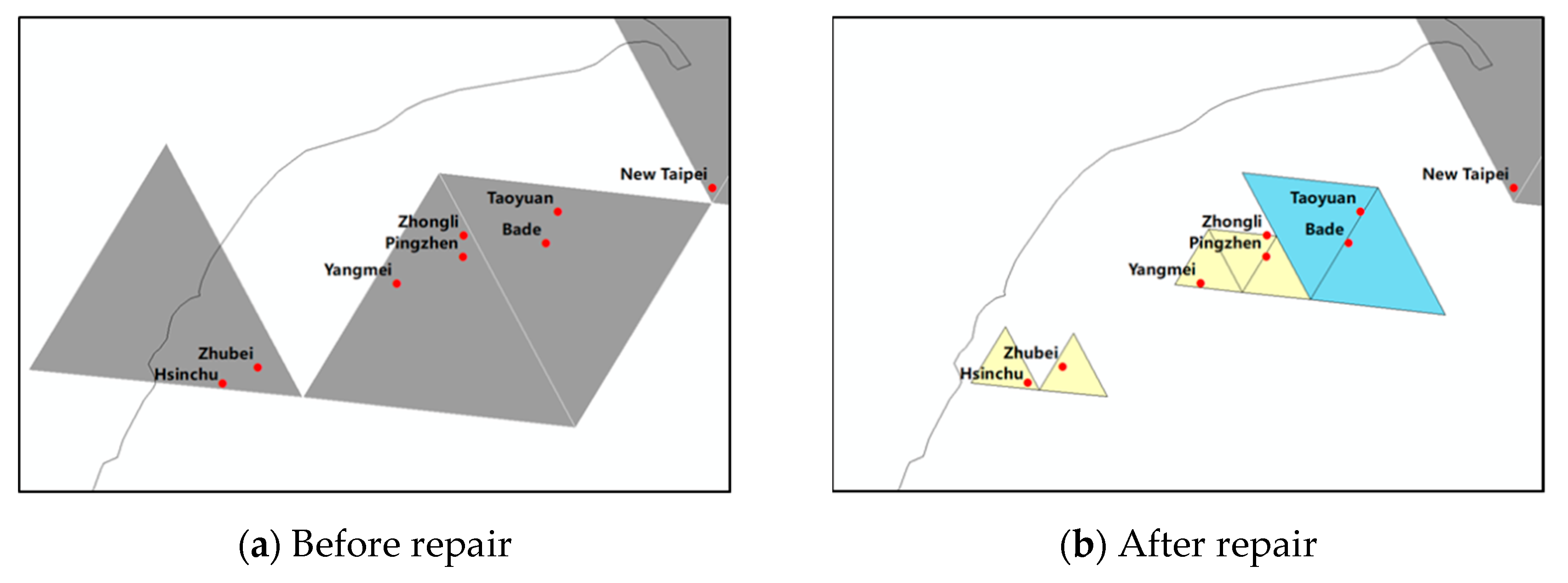
4.1. Topological Distortion of Point Features
4.2. Topological Distortion of Line Features
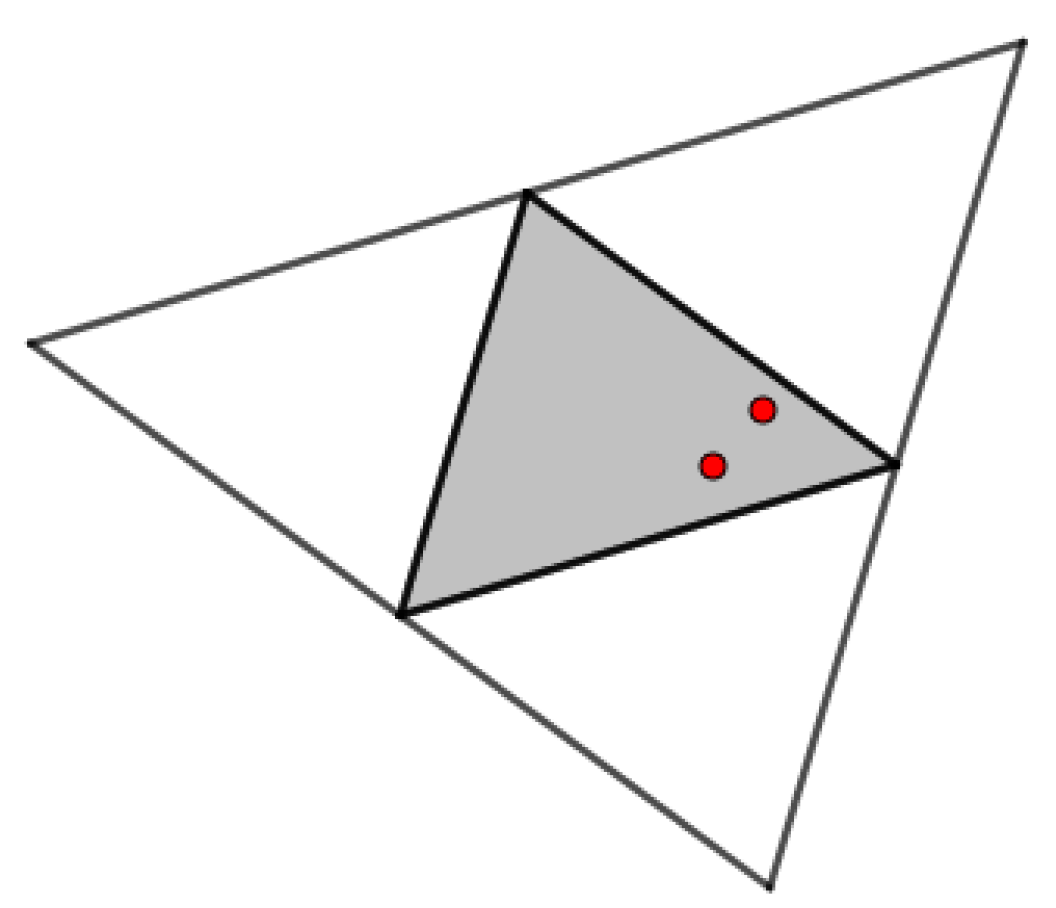
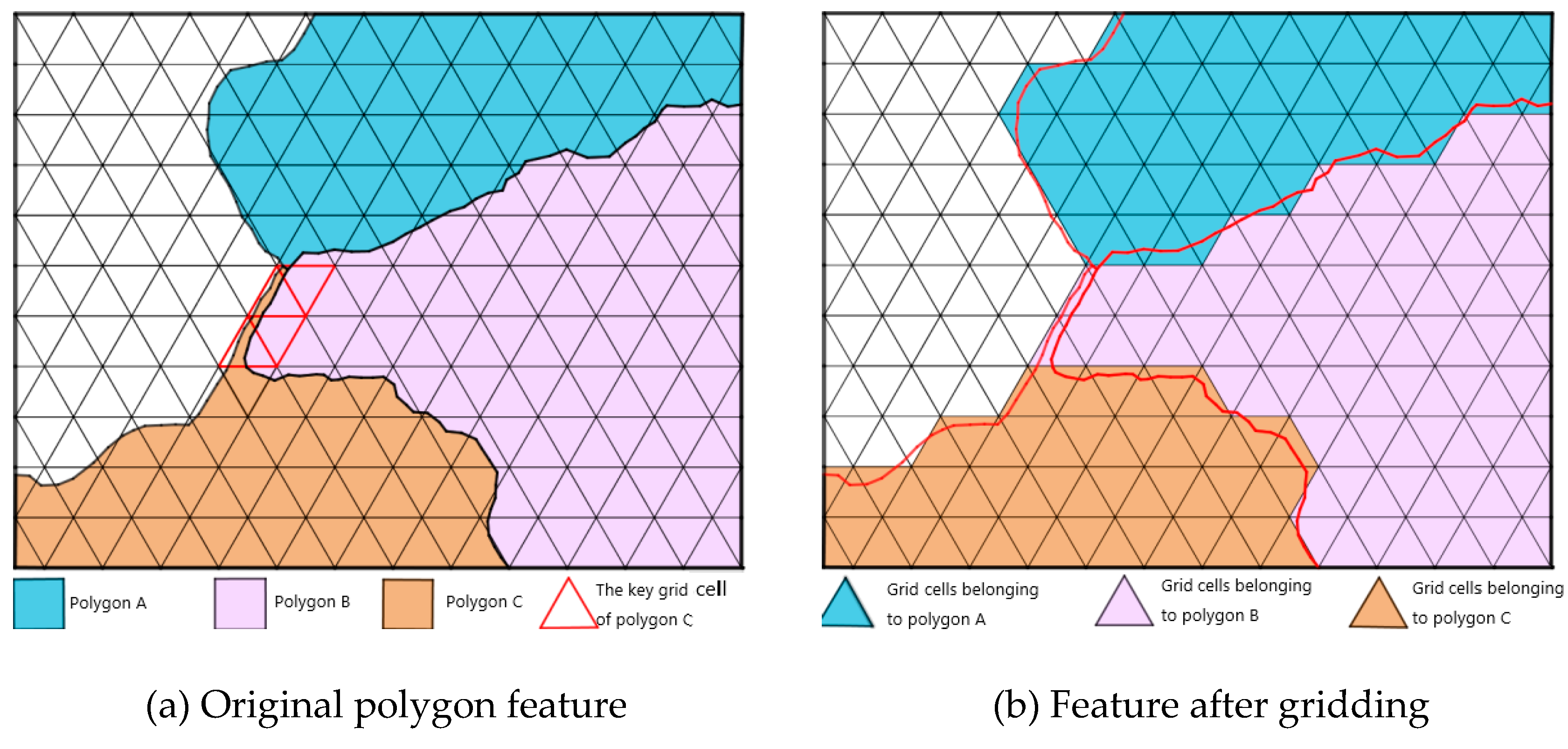
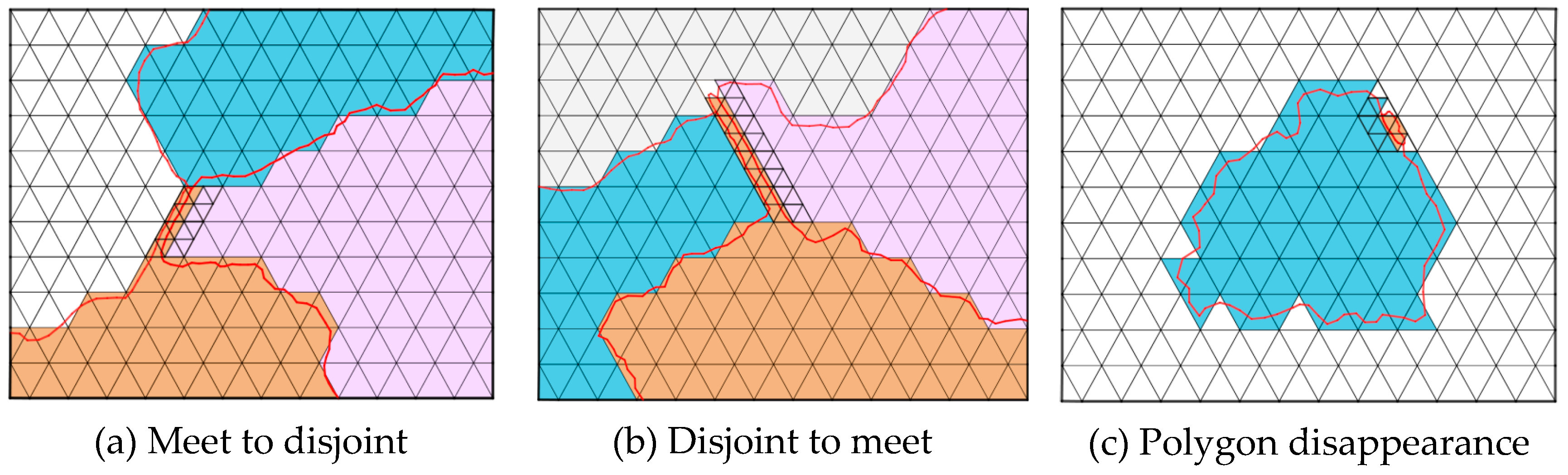
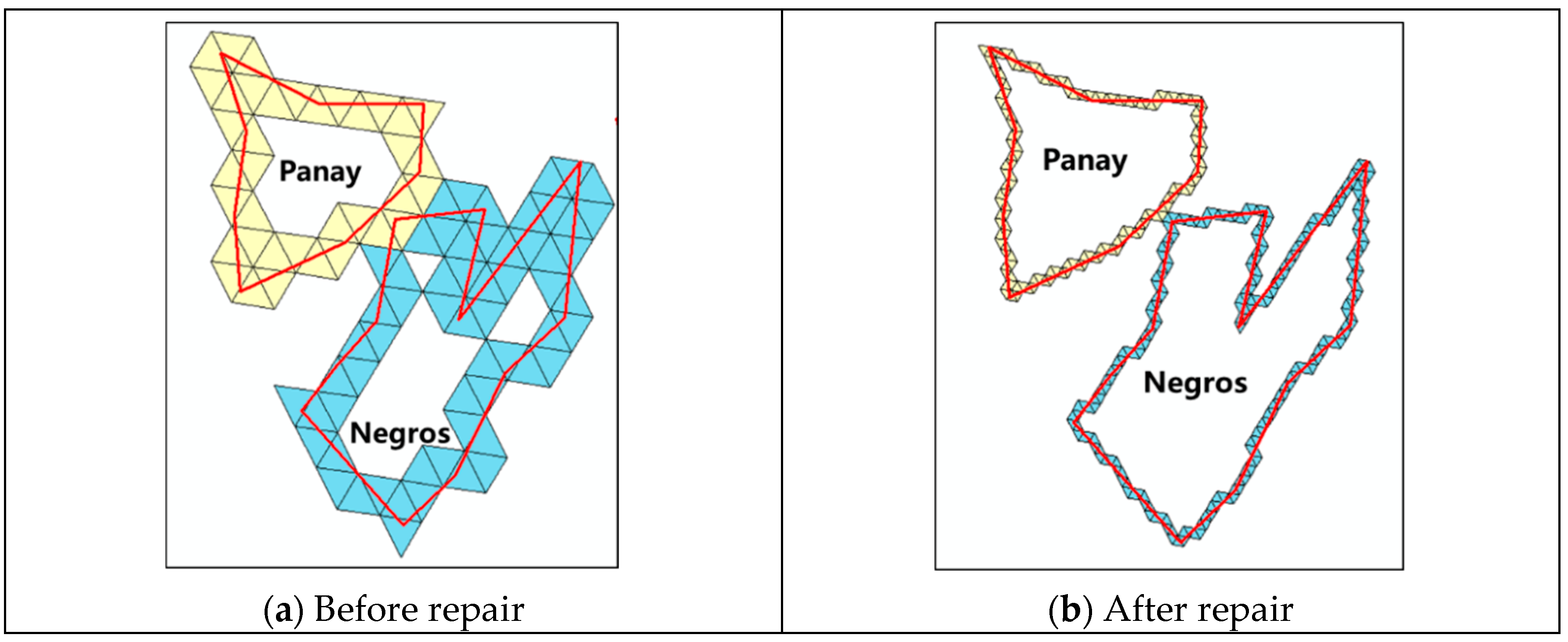
4.3. Topological Distortion of Polygon Features
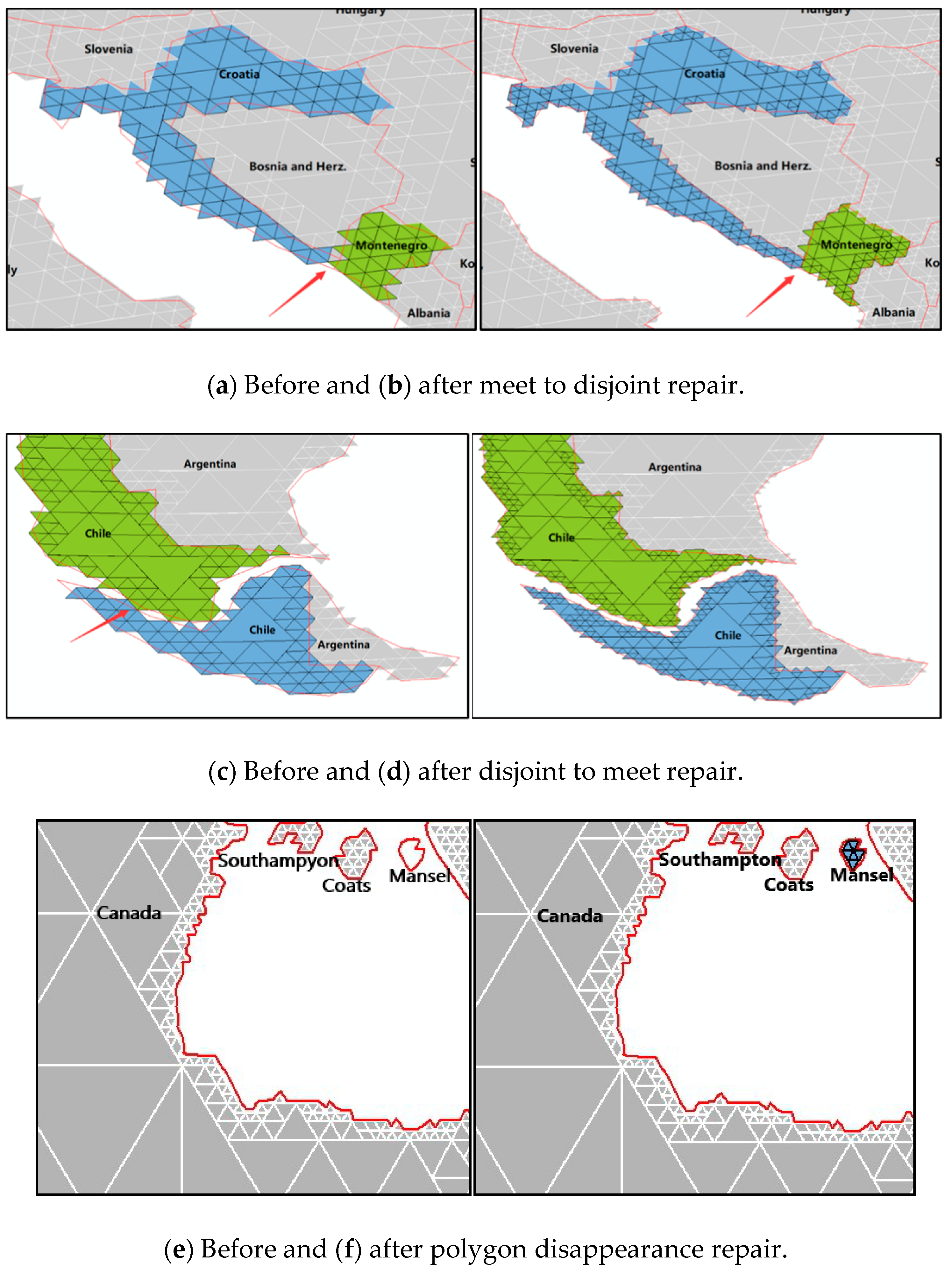
4.3.1. Meets to Disjoint
4.3.2. Disjoint to Meets
4.3.3. Polygon Disappearance
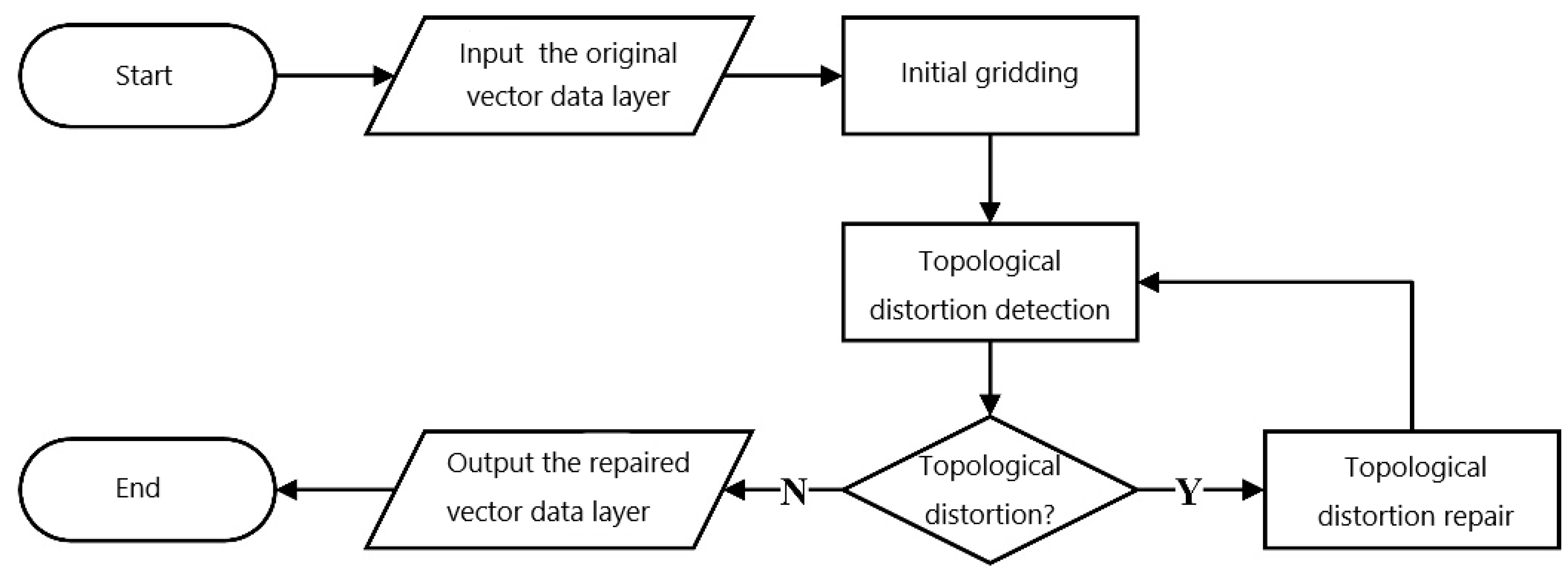
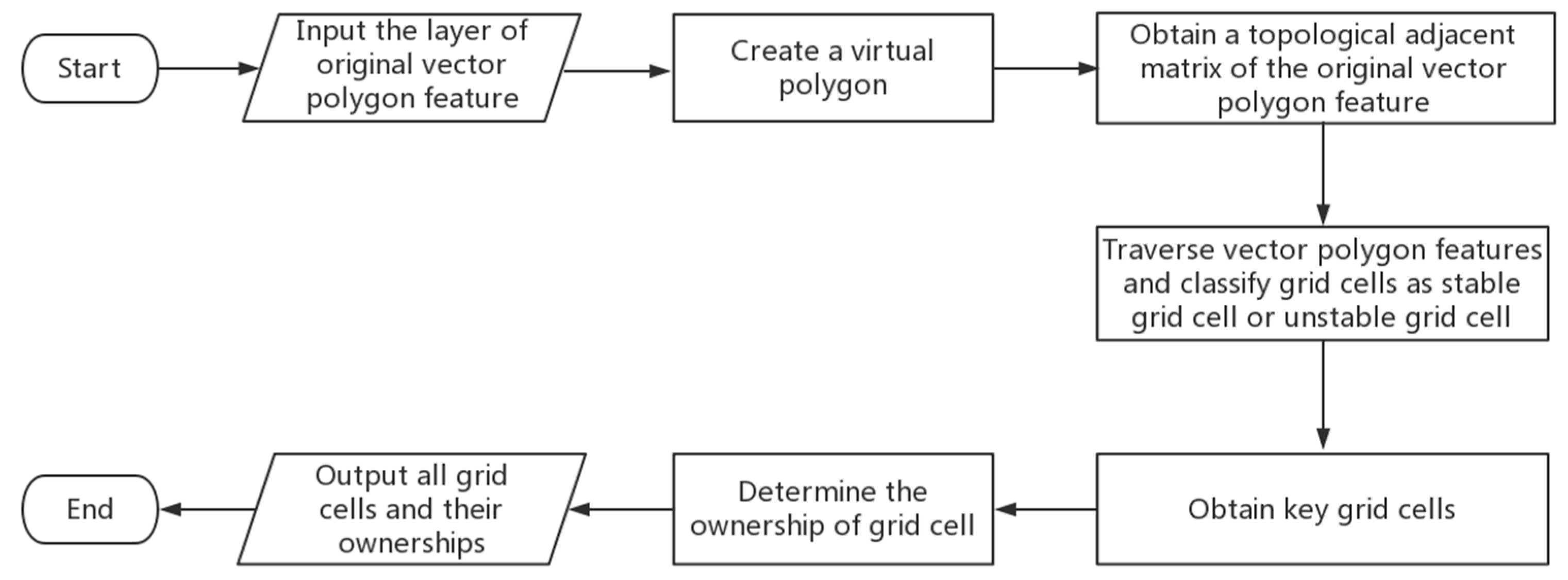
5. Topology Preserving Gridding Method for Vector Features
5.1. Gridding of Point Features
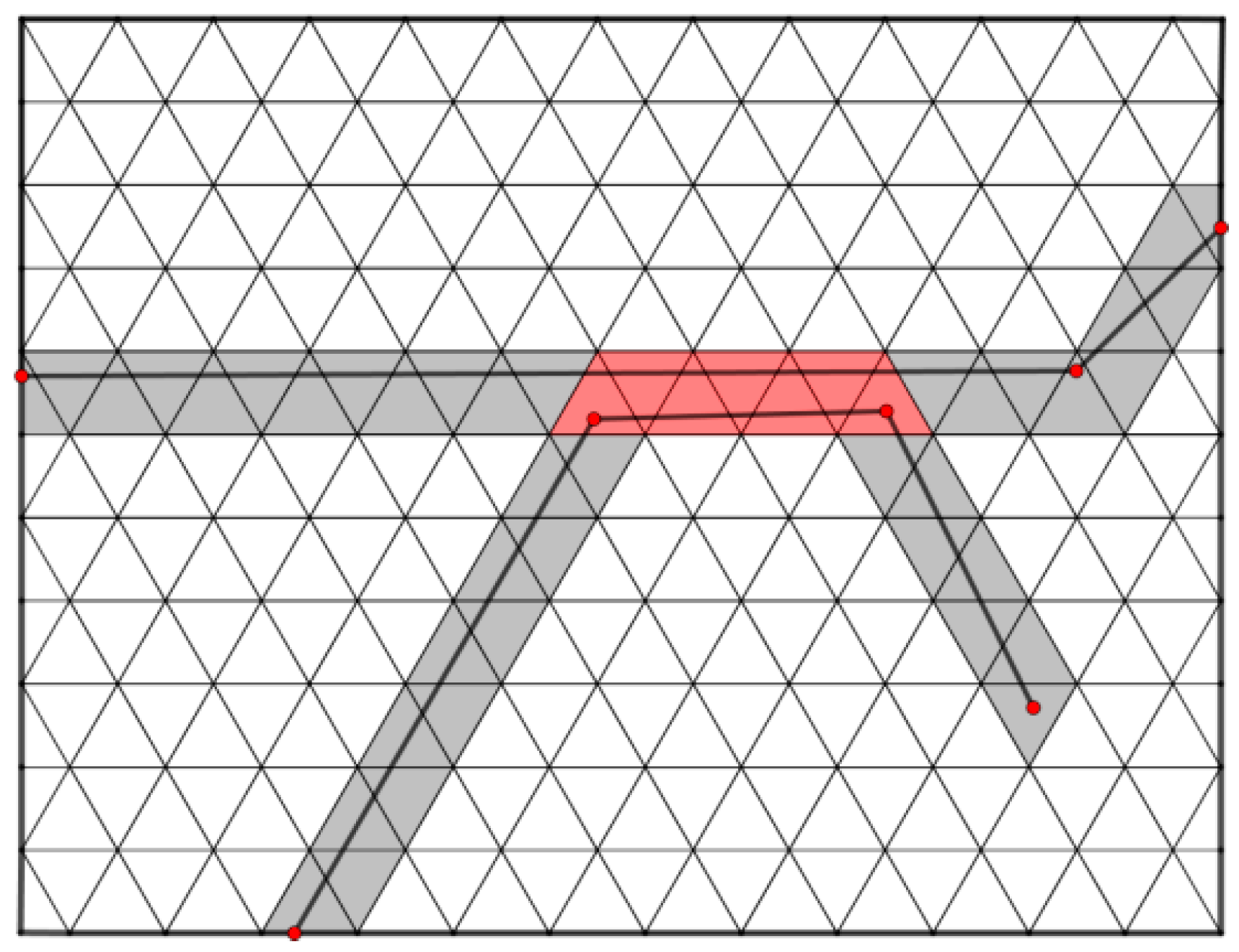
5.2. Gridding of Polyline Features
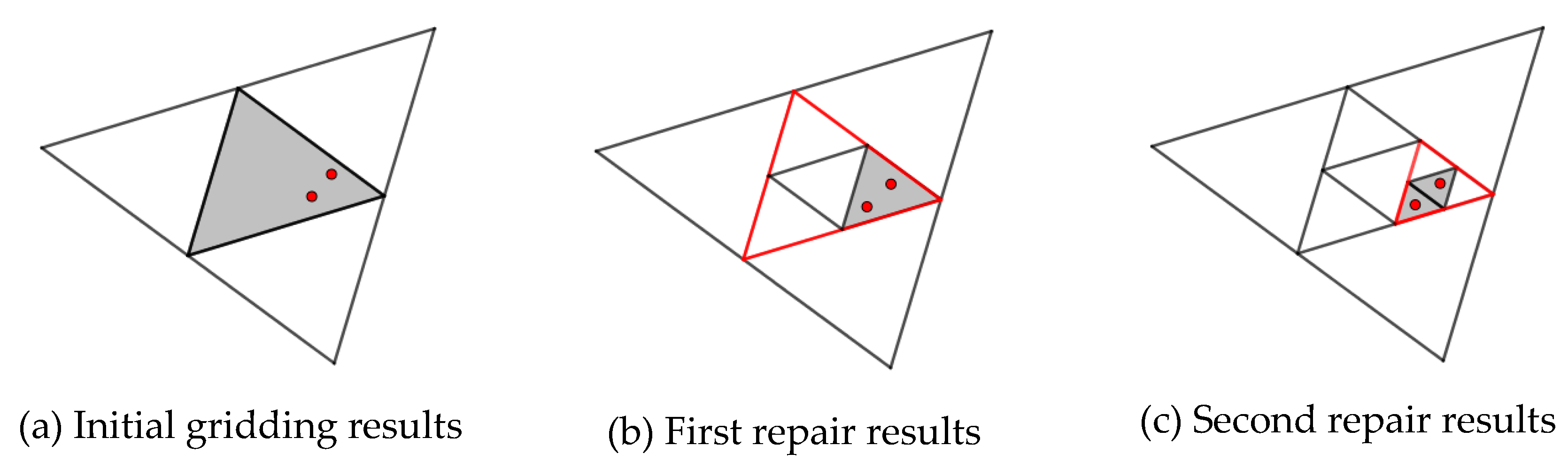
5.3. Gridding of Polygon Features
6. Case Study
6.1. Experimental Study on Repair Rate of Topological Distortion
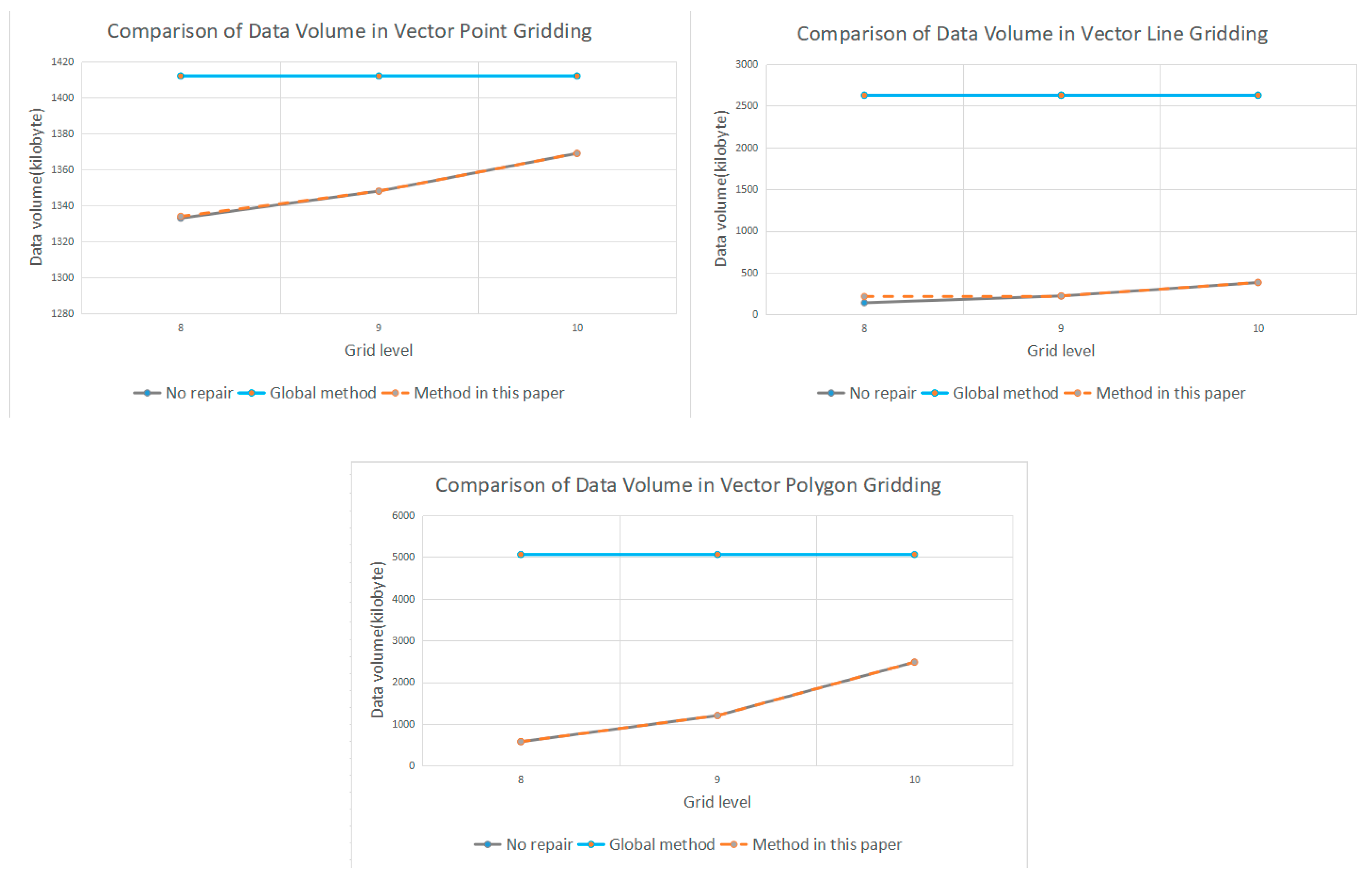
6.2. Data Volume Experiment
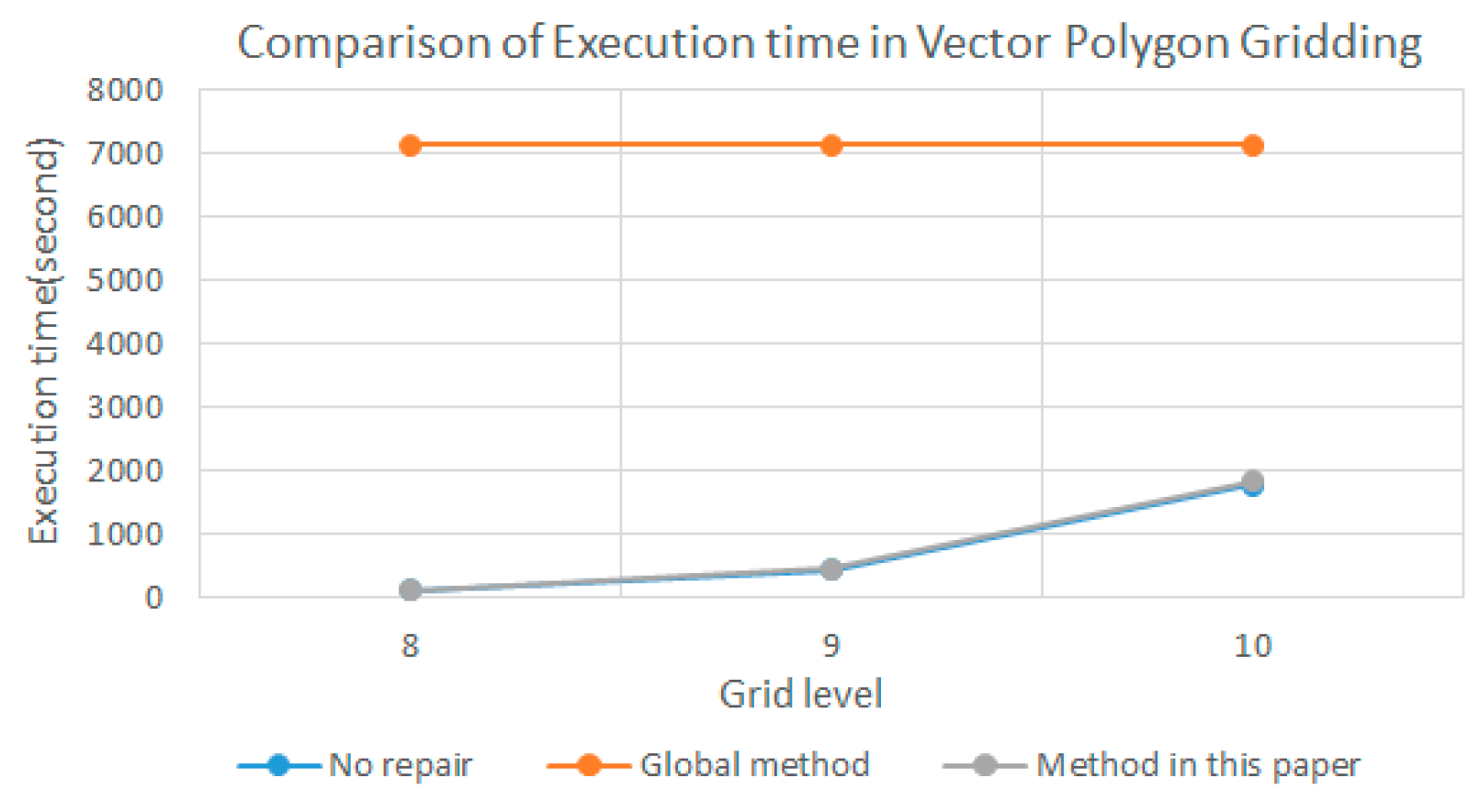
6.3. Algorithm Efficiency Experiment
7. Discussion
7.1. Comparison with the Global Method
7.2. Extensibility
8. Conclusion
Author Contributions
Funding
Conflicts of Interest
References
- Dutton, G. A hierarchical coordinate system for geoprocessing and cartograph. In A Hierarchical Coordinate System for Geoprocessing and Cartograph; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Sahr, K.; White, D.; Kimerling, A.J. Geodesic Discrete Global Grid Systems. Available online: http://cs.sou.edu/~sahrk/dgg/pubs/gdggs03.pdf (accessed on 15 February 2020).
- Goodchild, M.F. Discrete Global Grids: Retrospect and Prospect. 2012. Available online: http://en.cnki.com.cn/Article_en/CJFDTotal-DLGT201201002.htm (accessed on 15 February 2020).
- Sahr, K. Hexagonal discrete global grid systems for geospatial computing. Arch. Photogr. 2011, 22, 363–376. [Google Scholar]
- Topic 21: Discrete Global Grid Systems Abstract Specification. Available online: http://docs.opengeospatial.org/as/15-104r5/15-104r5.html (accessed on 2 August 2018).
- Adams, B. Wahi, a discrete global grid gazetteer built using linked open data. Int. J. Digit. Earth 2017, 10, 490–503. [Google Scholar] [CrossRef]
- Sirdeshmukh, N. Utilizing a Discrete Global Grid System For Handling Point Clouds With Varing Locations, Times, and Levels of Detail. Available online: http://www.gdmc.nl/publications/2018/Thesis_NeerajSirdeshmukh.pdf (accessed on 15 February 2020).
- Lin, B.; Zhou, L.; Xu, D.; Zhu, A.-X.; Lu, G. A discrete global grid system for earth system modeling. Int. J. Geogr. Inf. Sci. 2017, 32, 711–737. [Google Scholar] [CrossRef]
- Purss, M.B.J.; Gibb, R.; Samavati, F.; Peterson, P.; Ben, J. The OGC® Discrete Global Grid System core standard: A framework for rapid geospatial integration. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016. [Google Scholar]
- Carver, S.J.; Brunsdon, C. Vector to raster conversion error and feature complexity: An empirical study using simulated data. Int. J. Geogr. Inf. Syst. 1994, 8, 261–270. [Google Scholar] [CrossRef]
- Yu, W.; Tong, X.; Ben, J.; Xie, J. The accuracy control in the process of vector line data drawing in the hexagon discrete global grid system. J. Geogr. Inf. Sci. 2015, 8, 261–270. [Google Scholar]
- Tong, X.C.; Ben, J.; Zhang, Y.S. Design and quick display of global multi-resolution spatial data model. Sci. Surv. Mapp. 2006, 31, 72–74. [Google Scholar]
- Vince, A. Indexing the aperture 3 hexagonal discrete global grid. J. Vis. Commun. Image Represent. 2006, 17, 1227–1236. [Google Scholar] [CrossRef]
- Tong, X.; Jin, B.; Zhang, Y.; Wang, Y. The 3D Visualization Method of Hexagonal Discrete Global Grid Data. Acta Geod. Cartogr. Sin. 2013, 42, 62–70. [Google Scholar]
- Bettinger, P.; Bradshaw, G.A.; Weaver, G.W. Effects of geographic information system vector-rastervector data conversion on landscape indices. Can. J. For. Res. 1996, 26, 1416–1425. [Google Scholar] [CrossRef] [Green Version]
- Congalton, R.G. Exploring and evaluating the consequences of vector-to-raster and raster-to-vector conversion. Photogr. Eng. Remote Sens. 1997, 63, 425–434. [Google Scholar]
- Zhou, C.; Li, D.; Xiao, N.; Chen, Z.; Li, X.; Li, M. A topology-preserving polygon rasterization algorithm. Cartogr. Geogr. Inf. Sci. 2017, 4, 1–15. [Google Scholar] [CrossRef]
- Egenhofer, M.J.; Sharma, J. Topological relations between regions in R2 and Z2. In Advances in Spatial Database; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- OGC. OpenGIS® Implementation Standard for Geographic information - Simple Feature Access - Part 1, Common Architecture. 2010. Available online: https://www.ogc.org/standards/sfa (accessed on 2 August 2018).
- Du, L.; Ma, Q.; Ben, J.; Wang, R.; Li, J. Duality and Dimensionality Reduction Discrete Line Generation Algorithm for a Triangular Grid. ISPRS Int. J. Geo-Inf. 2018, 7, 391. [Google Scholar] [CrossRef] [Green Version]
- Muller, J.C. Map gridding and cartographic errors: A recurrent argument. Cartogr. Int. J. Geogr. Inf. Geovis. 1977, 14, 152–167. [Google Scholar] [CrossRef]
- Veregin, H. A review of error models for vector to raster conversion. Oper. Geogr. 1987, 7, 11–15. [Google Scholar]
- Chrisman, N.R.; Lester, M.K. A diagnostic test for error in categorical maps. In ProcAuto-Carto 10; ACSM/ASPRS: Baltimore, MD, USA, 1991; pp. 330–348. [Google Scholar]
- Van Der Knaap, W.G.M. The vector to raster conversion: (mis)use in geographical information systems. Int. J. Geogr. Inf. 1992, 6, 12. [Google Scholar] [CrossRef]
- Worboys, M.; Duckham, M. GIS: A Computing Perspective; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Fekete, G.; Treinish, L.A. Sphere Quadtrees—A New Data Structure to Support the Visualization of Spherically Distributed Data; The International Society for Optical Engineering: Bellingham, WA, USA, 1990; Volume 1259. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Level | Average Grid Edge Length (/m) | Map Scale SD |
|---|---|---|
| 7 | 55,106.47 | 1:550,000,000 |
| 8 | 27,553.24 | 1:300,000,000 |
| 9 | 13,776.62 | 1:100,000,000 |
| 10 | 6888.31 | 1:50,000,000 |
| 11 | 3444.16 | 1:35,000,000 |
| Level | Feature Type | Before Repair | After Repair | Rate Repair |
|---|---|---|---|---|
| 8 | Point | 128 | 0 | 100 |
| Polyline | 14 | 0 | 100 | |
| Polygon | 71 | 0 | 100 | |
| 9 | Point | 28 | 0 | 100 |
| Polyline | 4 | 0 | 100 | |
| Polygon | 31 | 0 | 100 | |
| 10 | Point | 8 | 0 | 100 |
| Polyline | 3 | 0 | 100 | |
| Polygon | 12 | 0 | 100 |
| Repair Method | Level 8 | Level 9 | Level 10 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Point | Line | Polygon | Point | Line | Polygon | Point | Line | Polygon | |
| None | 1333 | 138 | 572 | 1348 | 219 | 1199 | 1369 | 380 | 2480 |
| Global | 1412 | 2625 | 5061 | 1412 | 2625 | 5061 | 1412 | 2625 | 5061 |
| Proposed | 1334 | 213 | 574 | 1348 | 220 | 1200 | 1369 | 381 | 2481 |
| Repair Method | Level 8 | Level 9 | Level 10 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Point | Line | Polygon | Point | Line | Polygon | Point | Line | Polygon | |
| None | 0.3 | 0.3 | 115.6 | 0.4 | 0.4 | 451.1 | 0.4 | 0.4 | 1780.0 |
| Global | 5.1 | 14.6 | 7133.8 | 5.1 | 14.6 | 7133.8 | 5.1 | 14.6 | 7133.8 |
| Proposed | 4.8 | 0.9 | 119.5 | 4.9 | 1.0 | 461.3 | 5.0 | 1.7 | 1836.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, L.; Lian, W.; Zhang, Y.; Lin, B. A Topology Preserving Gridding Method for Vector Features in Discrete Global Grid Systems. ISPRS Int. J. Geo-Inf. 2020, 9, 168. https://doi.org/10.3390/ijgi9030168
Zhou L, Lian W, Zhang Y, Lin B. A Topology Preserving Gridding Method for Vector Features in Discrete Global Grid Systems. ISPRS International Journal of Geo-Information. 2020; 9(3):168. https://doi.org/10.3390/ijgi9030168
Chicago/Turabian StyleZhou, Liangchen, Wenjie Lian, Yudi Zhang, and Bingxian Lin. 2020. "A Topology Preserving Gridding Method for Vector Features in Discrete Global Grid Systems" ISPRS International Journal of Geo-Information 9, no. 3: 168. https://doi.org/10.3390/ijgi9030168
APA StyleZhou, L., Lian, W., Zhang, Y., & Lin, B. (2020). A Topology Preserving Gridding Method for Vector Features in Discrete Global Grid Systems. ISPRS International Journal of Geo-Information, 9(3), 168. https://doi.org/10.3390/ijgi9030168