Quantification Method for the Uncertainty of Matching Point Distribution on 3D Reconstruction



Abstract
:1. Introduction
2. Methods
| Specific steps: |
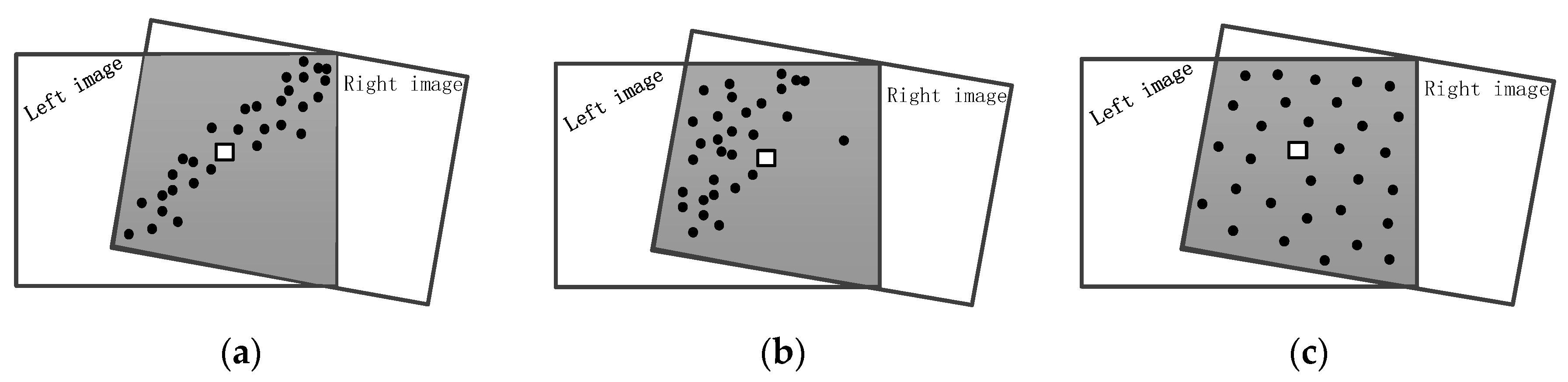
| 1. Matching points on multiple images are extracted. 2. The overlapping or interested region of multiple images is estimated, and the center point coordinate of the overlapping or interested region is computed. 3. is respectively calculated based on feature points in overlapping regions. 4. is calculated, which is the average of on all images. |
3. Experiment
3.1. Simulation Scene
3.1.1. Data Source
3.1.2. of Matching Points
3.1.3. Result Evaluation
Evaluated by the Number of Matching Points
Evaluated by the Distribution of Matching Points
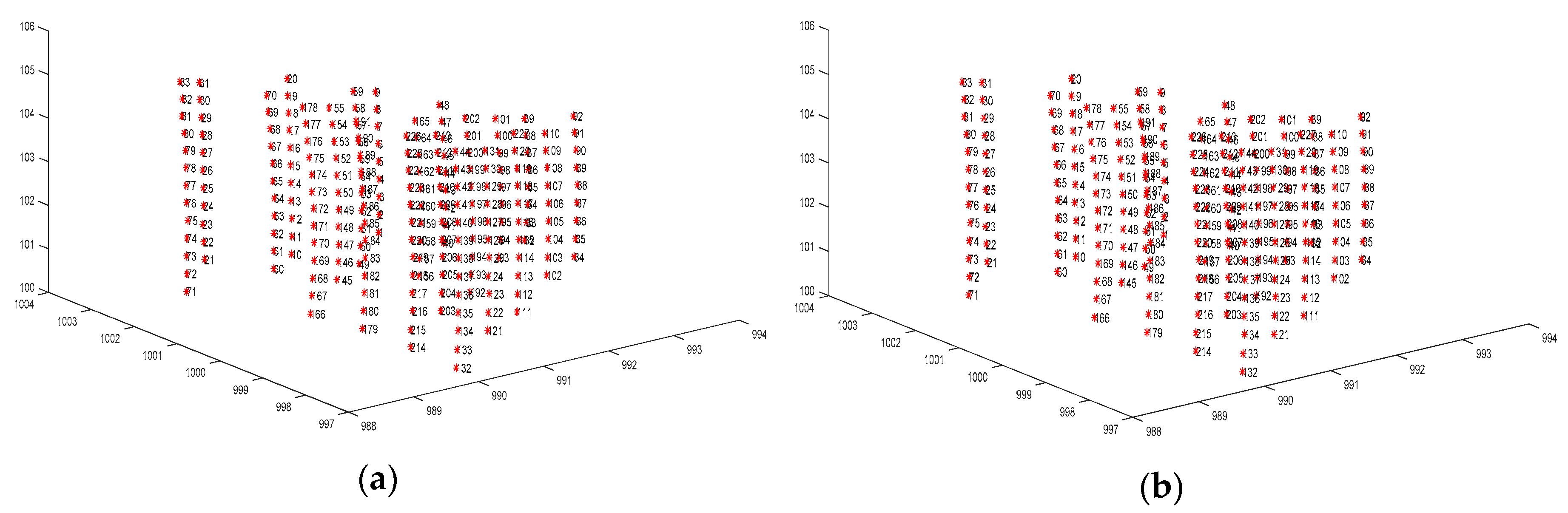
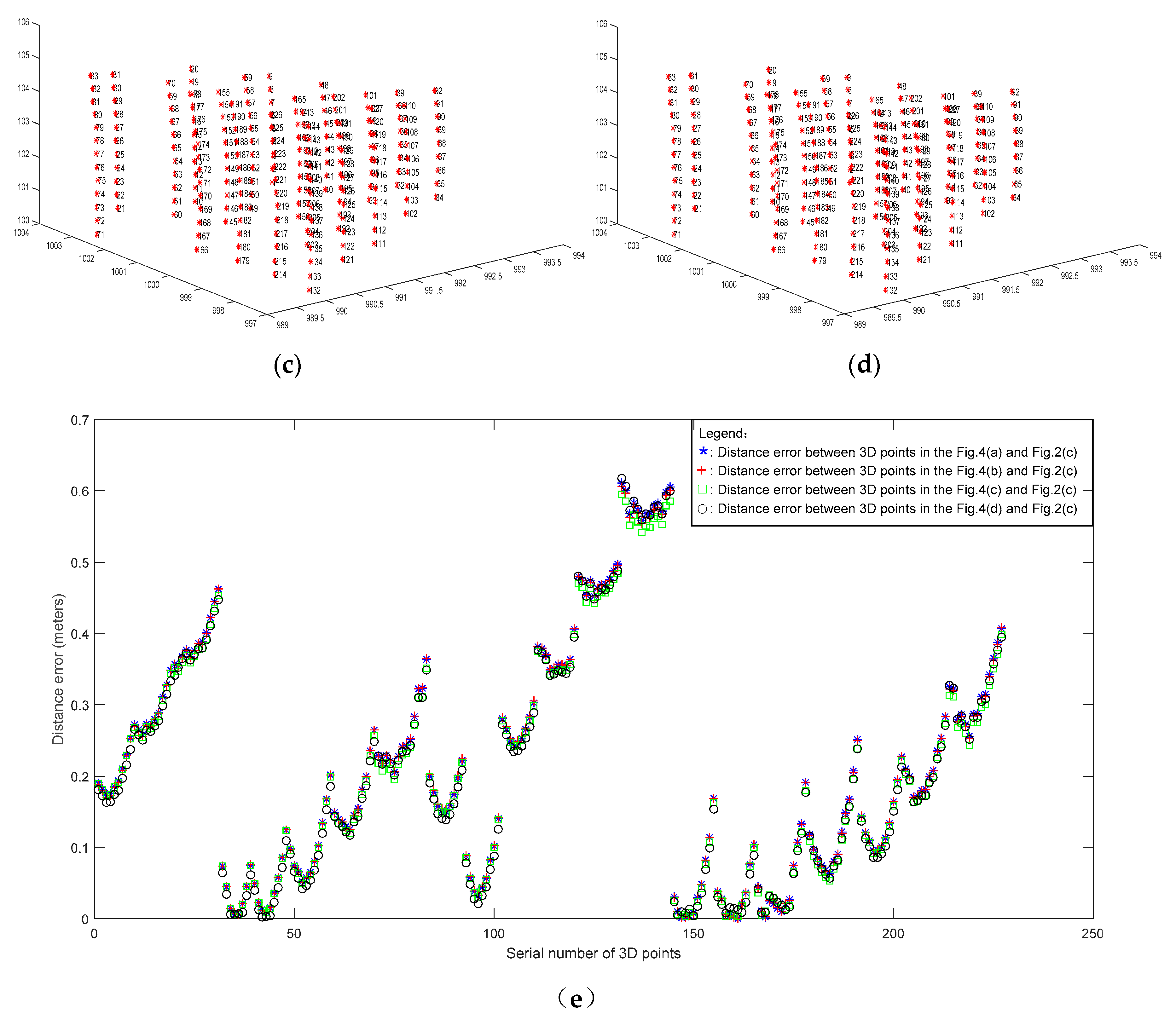
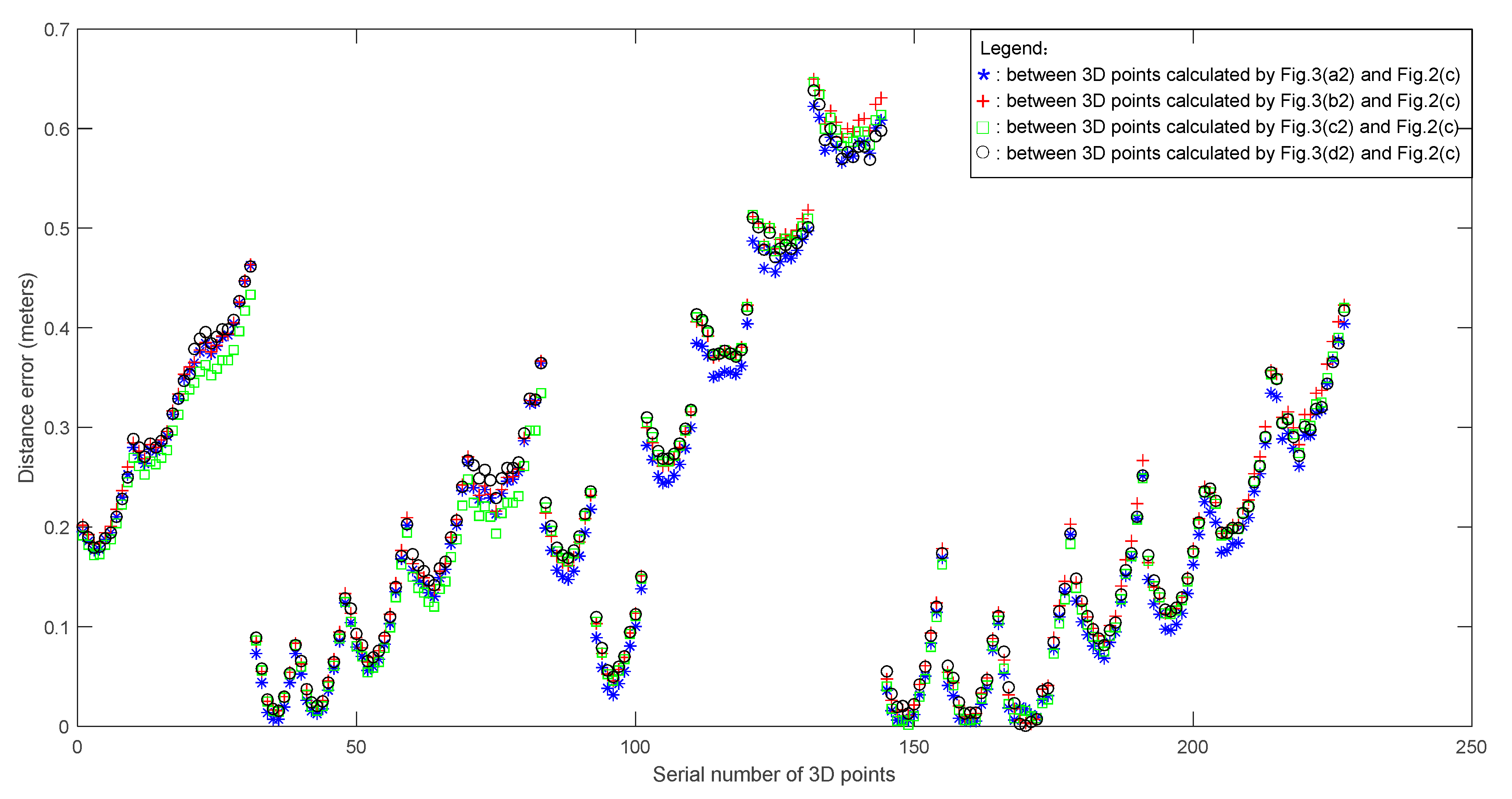
- The number of matching points had less effect on the accuracy of 3D points.
- The distributed regions of matching points surrounding the center point of overlapping regions had less effect on the accuracy of 3D points.
- The matching point distribution deviating from the center point of the overlapping regions affected the accuracy of 3D points.
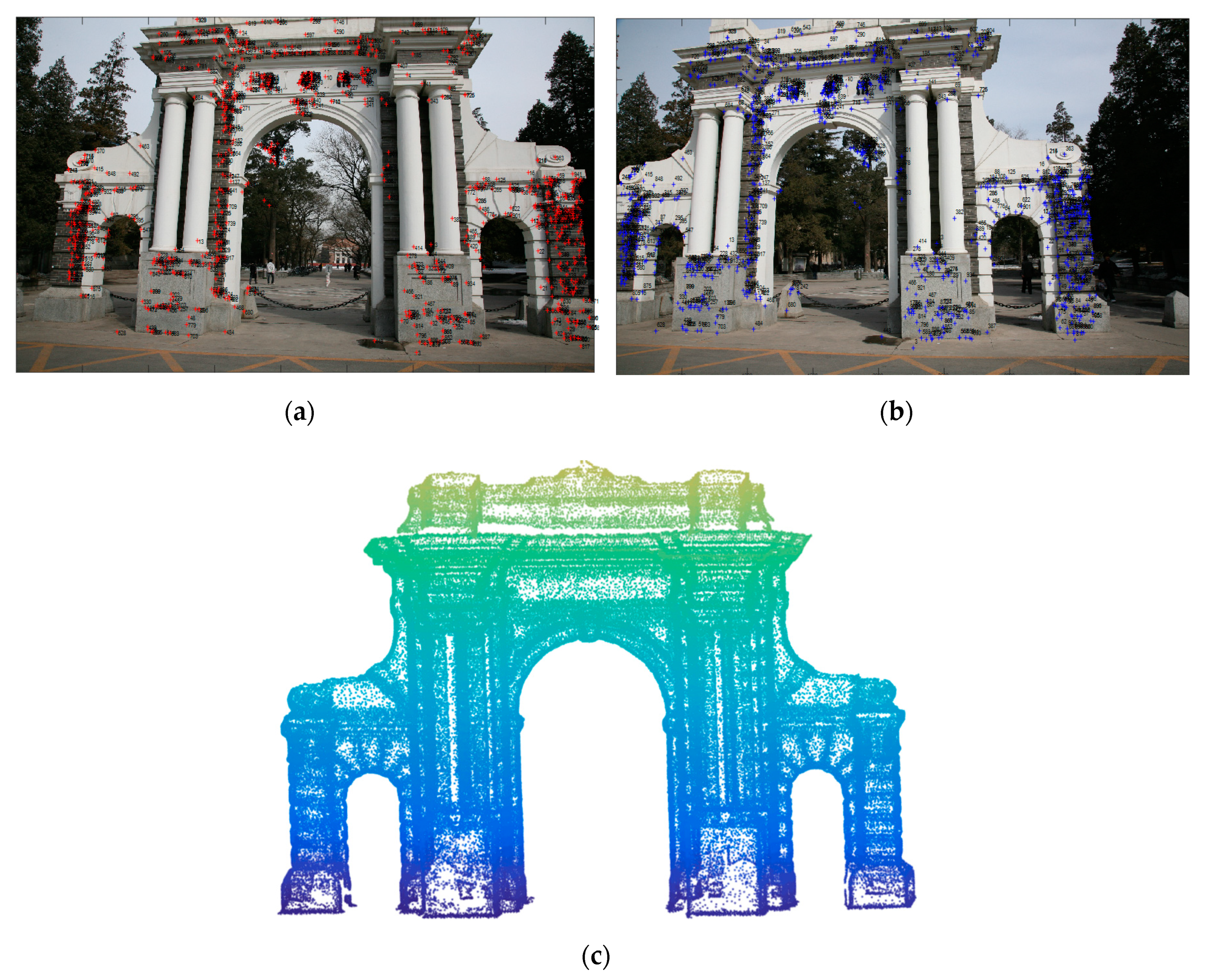
3.2. Real Scene
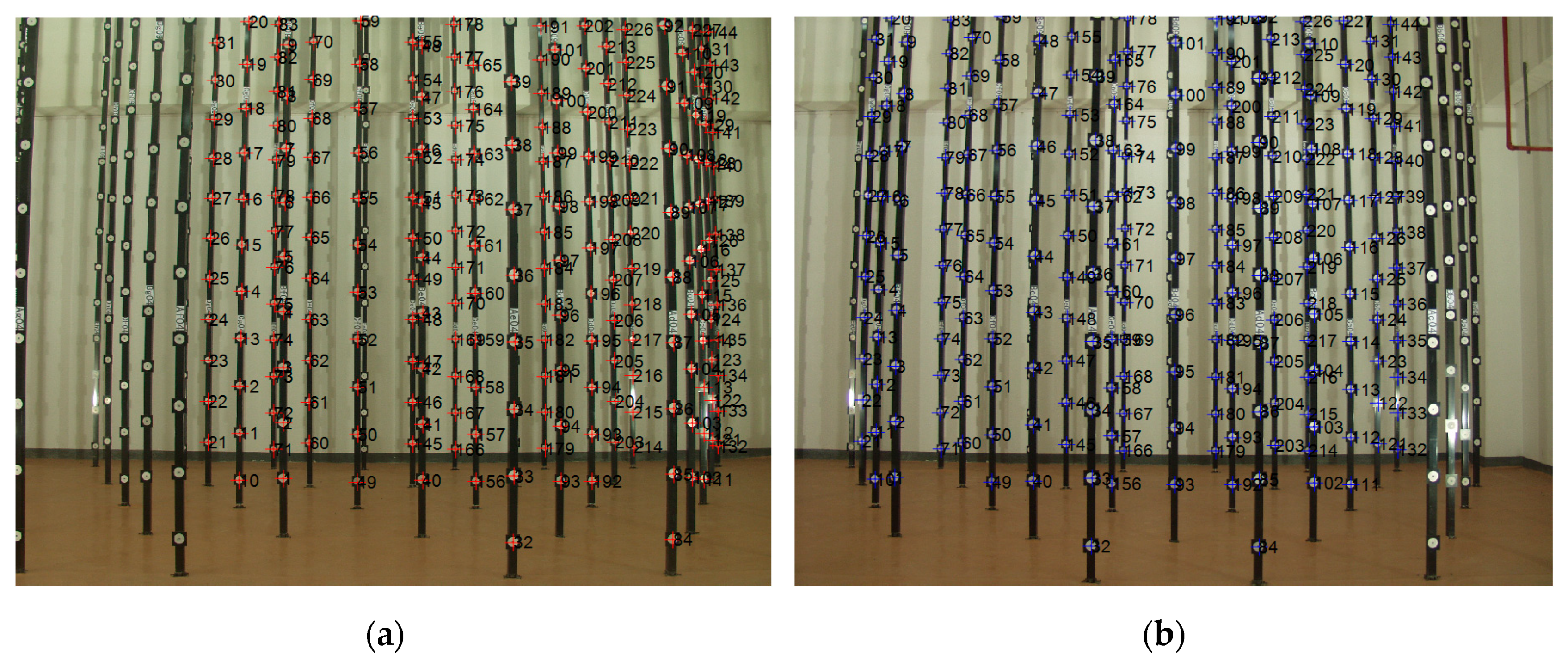
3.2.1. Data Source
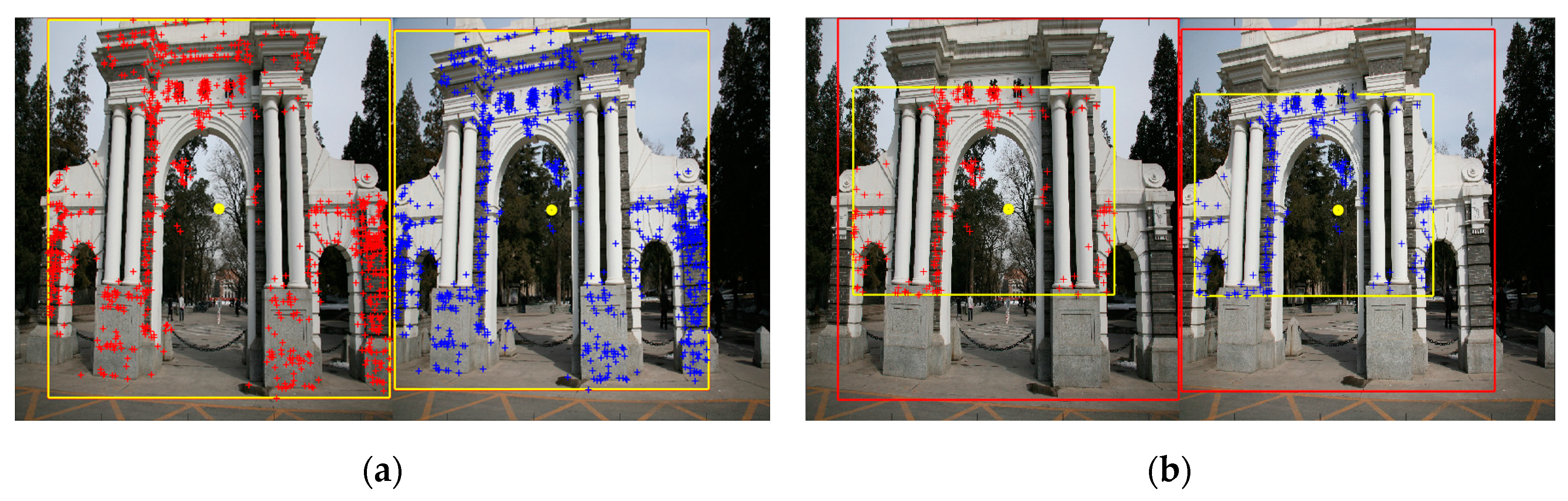
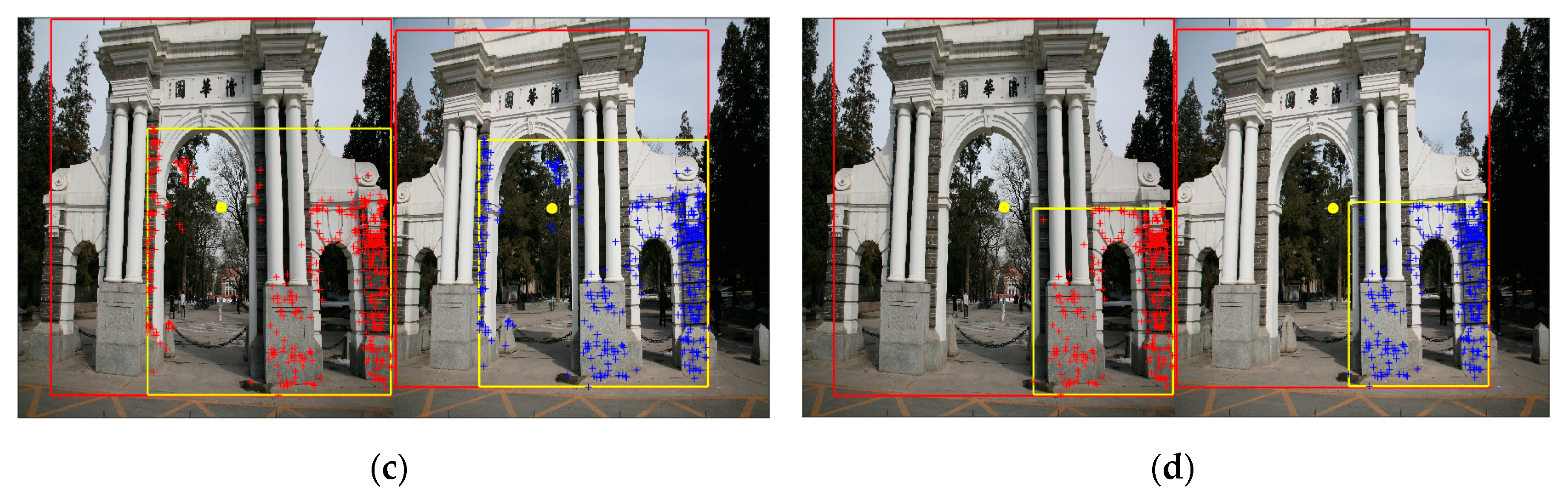
3.2.2. of Matching Points
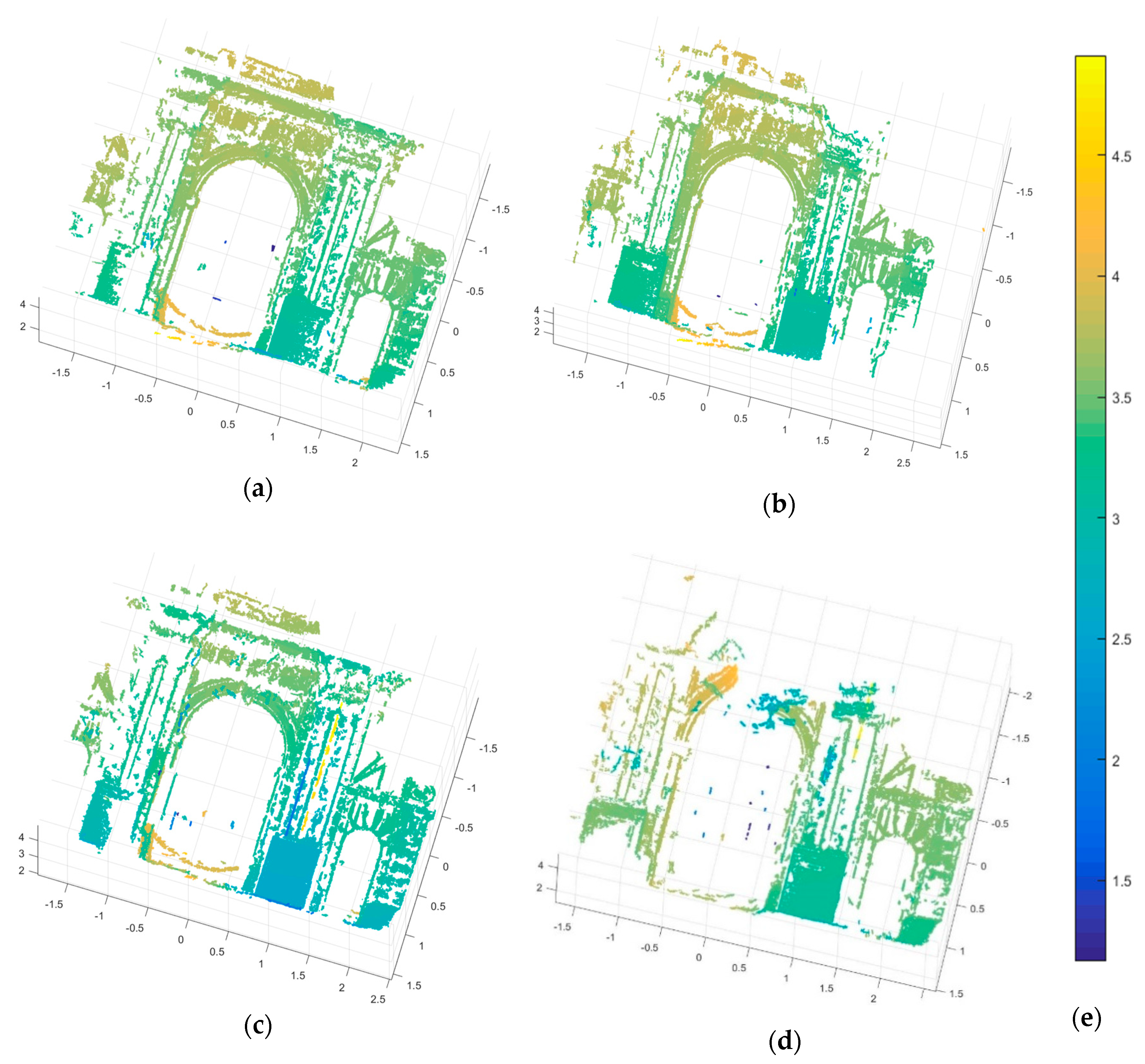
3.2.3. Result Evaluation
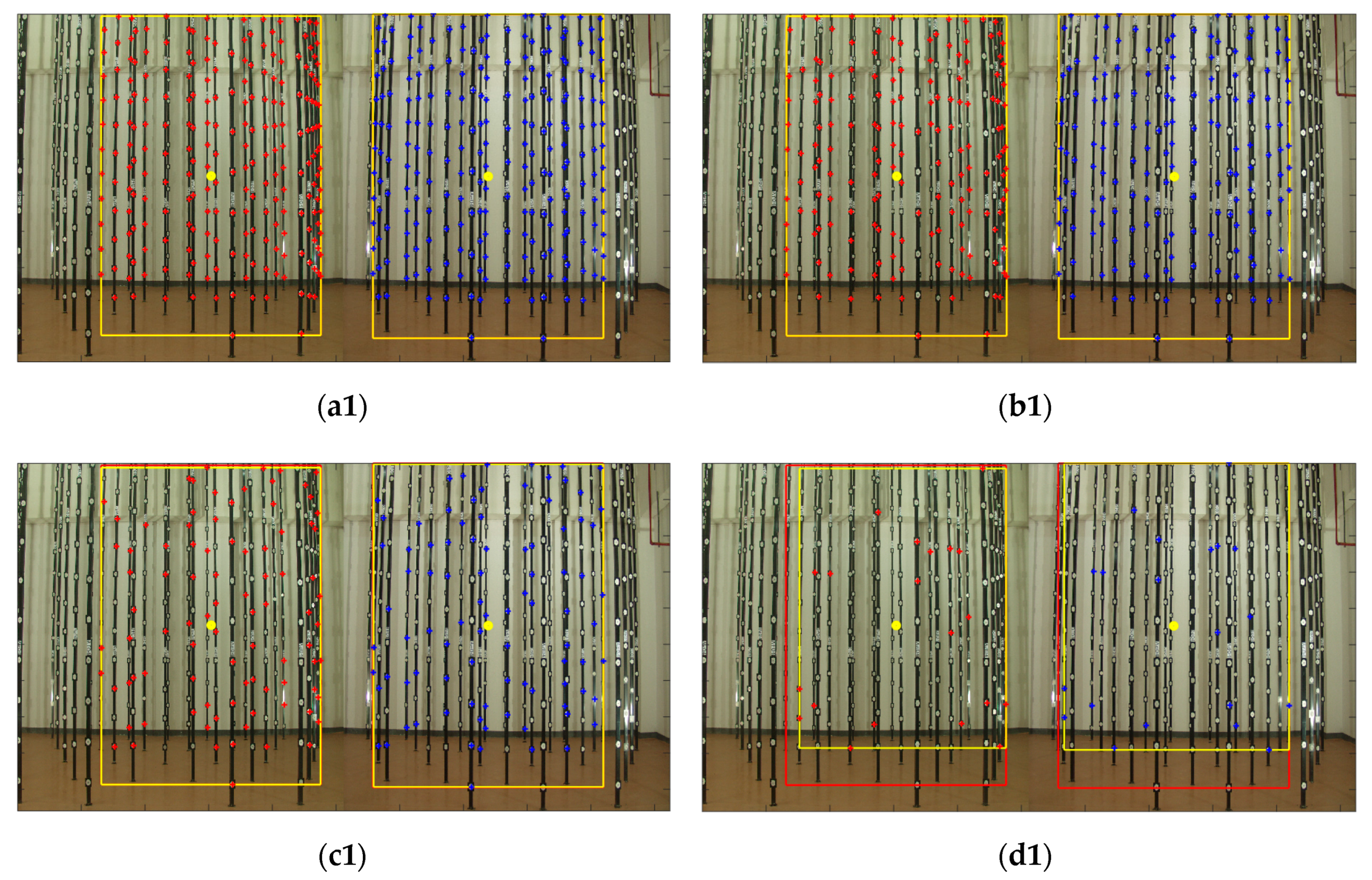
- The matching points in Figure 8b,d have the same number and different distributions, and three groups of 3D point clouds that are reconstructed used them quite different. Here, its quality using matching points surrounding the center point of overlapping regions is higher. So, we can say that matching points surrounding the center point maybe have less effect on 3D point clouds.
- Matching points in Figure 8a,b have different numbers and are mainly distributed surrounding the center point of overlapping regions. However, three groups of 3D point clouds that were reconstructed are similar. Therefore, the number of matching points may have less of an effect on 3D point clouds.
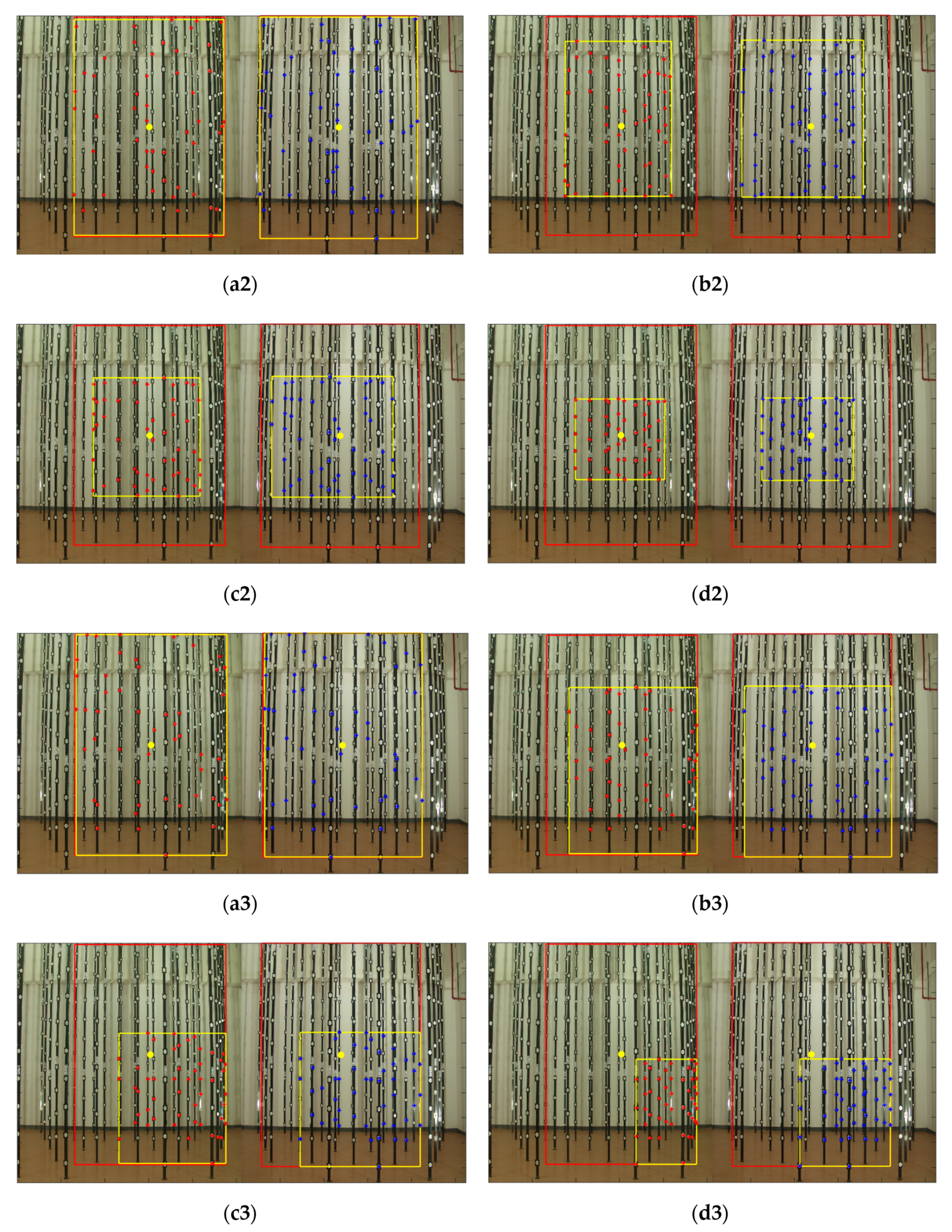
- The matching points in Figure 8a,c,d have different distributed regions, and gradually gather toward the lower-right corner of overlapping regions. Here, the three groups of 3D point clouds that were reconstructed using them are quite different. The overall shapes shown in Figure 9a,c are more complete, and that in Figure 9d is incomplete. Meanwhile, compared with Figure 9a, there are a small number in Figure 9c and a large number in Figure 9d of block objects that are not associated with the reconstructed Tsinghua Gate. The above change rule is consistent with the uniformity of the matching point distribution.
4. Conclusions
- The number of matching points in this study had less effect on the accuracy of 3D reconstruction.
- The distributed regions of matching points surrounding the center point of overlapping regions had less effect on the accuracy of 3D reconstruction.
- The matching point distribution deviating from the center point of the overlapping regions affected the accuracy of 3D reconstruction.
- HDOP was introduced to this study from satellite navigation and geomatics engineering. Here, the center point of the overlapping regions was selected as the receiver, which can reduce the effect of matching points surrounding the center point on HDOP.
- was constructed to measure the distribution of feature points, and has a range of [0, 1]. Here, , where removes the effect of the number of feature points.
- , the average of on all images, was utilized to measure the uncertainty of matching point distribution on 3D reconstruction.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Remondino, F.; El-Hakim, S. Image-based 3D Modelling: A Review. Photogramm. Rec. 2006, 21, 269–291. [Google Scholar] [CrossRef]
- Musialski, P.; Wonka, P.; Aliaga, D.G.; Wimmer, M.; Gool, L.V.; Purgathofer, W. A survey of urban reconstruction. Comput. Graph. Forum 2013, 32, 1–26. [Google Scholar] [CrossRef]
- Thuy, N.; David, S.; Nelson, M.; Julin, M.; Neelima, S. Structured light-based 3D reconstruction system for plants. Sensors 2015, 15, 18587–18612. [Google Scholar]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J. Structure from Motion in the Geosciences; John Wiley and Sons Limited: Chichester, UK, 2016. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Elhakim, S.F. Accuracy in image measure. Int. Soc. Opt. Eng. 1994, 2350, 218–228. [Google Scholar]
- Bowyer, K.; Kranenburg, C.; Dougherty, S. Edge detector evaluation using empirical roc curves. Comput. Vis. Image Underst. 2001, 84, 77–103. [Google Scholar] [CrossRef]
- Sankowski, W.; Wkodarczyk, M.; Kacperski, D. Estimation of measurement uncertainty in stereo vision system. Image Vis. Comput. 2017, 60, 70–81. [Google Scholar] [CrossRef]
- Kanazawa, Y.; Kanatani, K. Do we really have to consider covariance matrices for image features? IEEE Int. Conf. Comput. Vis. 2001, 2, 301–306. [Google Scholar]
- Brooks, M.J.; Chojnacki, W.; Gawley, D.; Hengel, A.V.D. What value covariance information in estimating vision parameters. IEEE Int. Conf. Comput. Vis. 2001, 302–308. [Google Scholar]
- Kanatani, K. Uncertainty modeling and model selection for geometric inference. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 1307–1319. [Google Scholar] [CrossRef]
- Weng, J.; Huang, T. Motion and Structure from Two Perspective View: Algorithms, error Analysis and Error Estimation. Pattern Anal. Mach. Intell. 1989, 11, 451–476. [Google Scholar] [CrossRef] [Green Version]
- Cui, J.; Min, C.; Bai, X. An Improved Pose Estimation Method Based on Projection Vector with Noise Error Uncertainty. IEEE Photonics J. 2019, 11. [Google Scholar] [CrossRef]
- Steele, R.; Jaynes, C. Feature uncertainty arising from covariant image noise. Comput. Vis. Pattern Recognit. 2005, 1, 1063–1070. [Google Scholar]
- Park, H.; Shin, D.; Bae, H.; Baeg, H. Spatial uncertainty model for visual features using a kinect? Sensors 2012, 12, 8640–8662. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Belhaoua, A.; Kohler, S.; Hirsch, E. Error evaluation in a stereovision-based 3D reconstruction system. J. Image Video Process. 2010, 6, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Haralick, R. Propagating covariance in computer vision. Pattern Recognit. Artif. Intell. 1996, 10, 561–572. [Google Scholar] [CrossRef] [Green Version]
- Di Leo, G.; Liguori, C.; Paolillo, A. Covariance propagation for the Uncertainty Estimation in Stereo Vision. Ieee Trans. Instrum. Meas. 2011, 60, 1664–1673. [Google Scholar] [CrossRef]
- Liu, B.G.; Yuan, L.X.; Zheng, N.N.; Shu, F. Several Camera Geometry Models and Error Analysis for Image Matching in 3-D Machine Vision. Acta Photonica Sin. 1997, 26, 737–741. [Google Scholar] [CrossRef]
- Gui, Y.; Su, A.; Du, J. Point-pattern matching method using SURF and Shape Context. Opt. Int. J. Light Electron Opt. 2013, 124, 1869–1873. [Google Scholar] [CrossRef]
- Tong, G.; Wang, C.C.; Wang, P. Study on improving image feature points detection and matching accuracy in binocular vision system. In Proceedings of the International Industrial Informatics and Computer Engineering Conference, Xi’an, China, 10–11 January 2015. [Google Scholar]
- Zhao, Y.; Su, J.B. Local sharpness distribution–based feature points matching algorithm. J. Electron. Imaging 2014, 23, 013011. [Google Scholar] [CrossRef]
- Hu, M.; Liu, Y.; Fan, Y. Robust Image Feature Point Matching Based on Structural Distance; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Kihara, M.; Okada, T. A satellite selection method and accuracy for the global positioning system. Navigation 1984, 31, 8–20. [Google Scholar] [CrossRef]
- Wu, C.H.; Ho, Y.W.; Chen, L.W.; Huang, Y.D. Discovering approximate expressions of GPS geometric dilution of precision using genetic programming. Adv. Eng. Softw. 2012, 45, 332–340. [Google Scholar] [CrossRef]
- Santerre, R.; Geiger, A.; Banville, S. Geometry of GPS dilution of precision: Revisited. Gps Solut. 2017, 21, 1747–1763. [Google Scholar] [CrossRef]
- Li, J.; Li, Z.; Zhou, W. Study on the minimum of GDOP in satellite navigation and its applications. Acta Geod. Et Cartogr. Sin. 2011, 40, 85–88. [Google Scholar]
- Bu, C.J.; Luo, Y.S. Matrix Theory; Harbin Engineer University Press: Harbin, China, 2003; pp. 164–174. [Google Scholar]
- Sheng, H.; Yang, J.S.; Zeng, F.L. The Minimum Value of GDOP in Pseudo-range Positioning. Fire Control Command Control 2009, 34, 22–24. [Google Scholar]
- VisualSFM: A Visual Structure from Motion System. Available online: http://ccwu.me/vsfm/ (accessed on 1 September 2018).
- Wu, C.; Agarwal, S.; Curless, B.; Seitz, S.M. Multicore bundle adjustment. Comput. Vis. Pattern Recognit. 2011.
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pami 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object Modelling by Registration of Multiple Range Images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Weiss, I.; Ray, M. Model-Based Recognition of 3D Object from Single Vision. IEEE Trans. Pami 2001, 23, 116–128. [Google Scholar] [CrossRef]
- Hilaga, M.; Shinagawa, Y.; Komura, T.; Kunii, L. Topology matching for fully automatic similarity estimation of 3D shapes. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniquesm, Los Angeles, CA, USA, 12–17 August 2001. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Matching Points | Figure 3(a1) | Figure 3(b1) | Figure 3(c1) | Figure 3(d1) |
| 0.0131 | 0.0134 | 0.0068 | 0.0120 | |
| Matching Points | Figure 3(a2) | Figure 3(b2) | Figure 3(c2) | Figure 3(d2) |
| 0.0089 | 0.0048 | 0.0122 | 0.0096 | |
| Matching Points | Figure 3(a3) | Figure 3(b3) | Figure 3(c3) | Figure 3(d3) |
| 0.0091 | 0.0670 | 0.2633 | 0.8770 |
| 3D Point Clouds | Figure 3(a3) | Figure 3(b3) | Figure 3(c3) | Figure 3(d3) |
|---|---|---|---|---|
| Mean error | 0.2228 | 0.2263 | 0.2371 | 0.2533 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bian, Y.; Liu, X.; Wang, M.; Liu, H.; Fang, S.; Yu, L. Quantification Method for the Uncertainty of Matching Point Distribution on 3D Reconstruction. ISPRS Int. J. Geo-Inf. 2020, 9, 187. https://doi.org/10.3390/ijgi9040187
Bian Y, Liu X, Wang M, Liu H, Fang S, Yu L. Quantification Method for the Uncertainty of Matching Point Distribution on 3D Reconstruction. ISPRS International Journal of Geo-Information. 2020; 9(4):187. https://doi.org/10.3390/ijgi9040187
Chicago/Turabian StyleBian, Yuxia, Xuejun Liu, Meizhen Wang, Hongji Liu, Shuhong Fang, and Liang Yu. 2020. "Quantification Method for the Uncertainty of Matching Point Distribution on 3D Reconstruction" ISPRS International Journal of Geo-Information 9, no. 4: 187. https://doi.org/10.3390/ijgi9040187
APA StyleBian, Y., Liu, X., Wang, M., Liu, H., Fang, S., & Yu, L. (2020). Quantification Method for the Uncertainty of Matching Point Distribution on 3D Reconstruction. ISPRS International Journal of Geo-Information, 9(4), 187. https://doi.org/10.3390/ijgi9040187