Automatic Generation of High-Accuracy Stair Paths for Straight, Spiral, and Winder Stairs Using IFC-Based Models


Abstract
:1. Introduction
2. Related Works
2.1. Indoor Spaces for Emergency Response
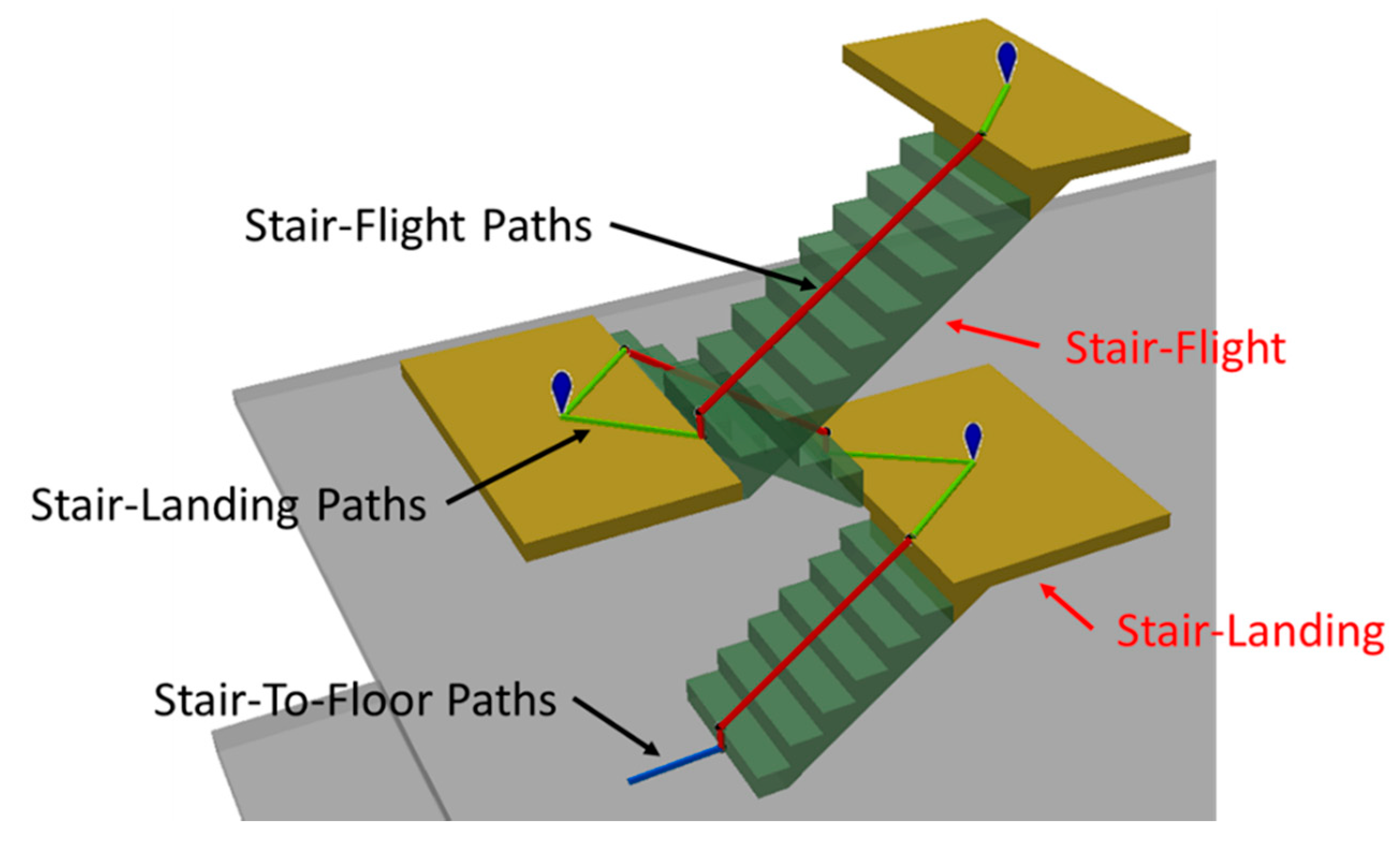
2.2. Generation of Stair Paths
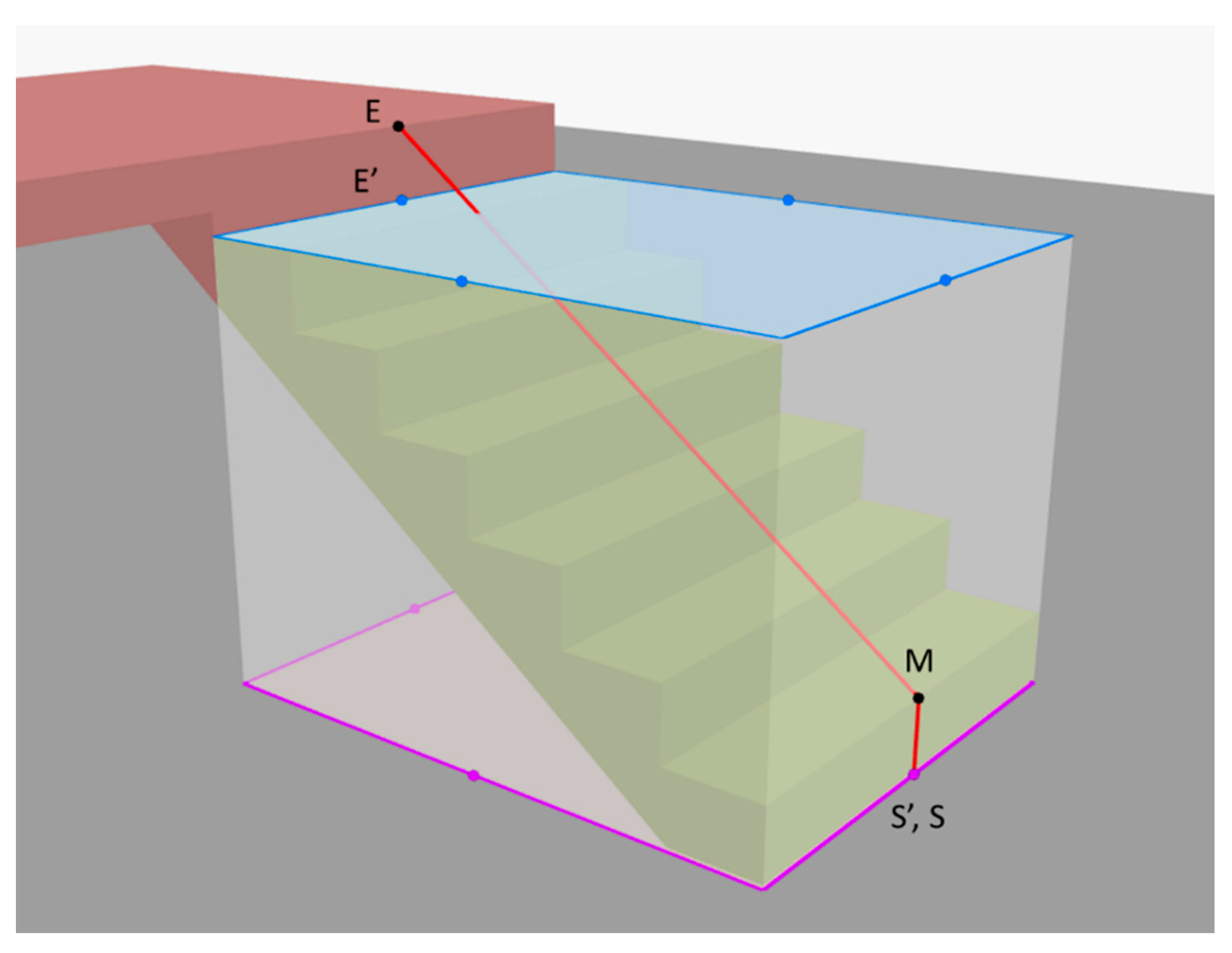
- Step 1:
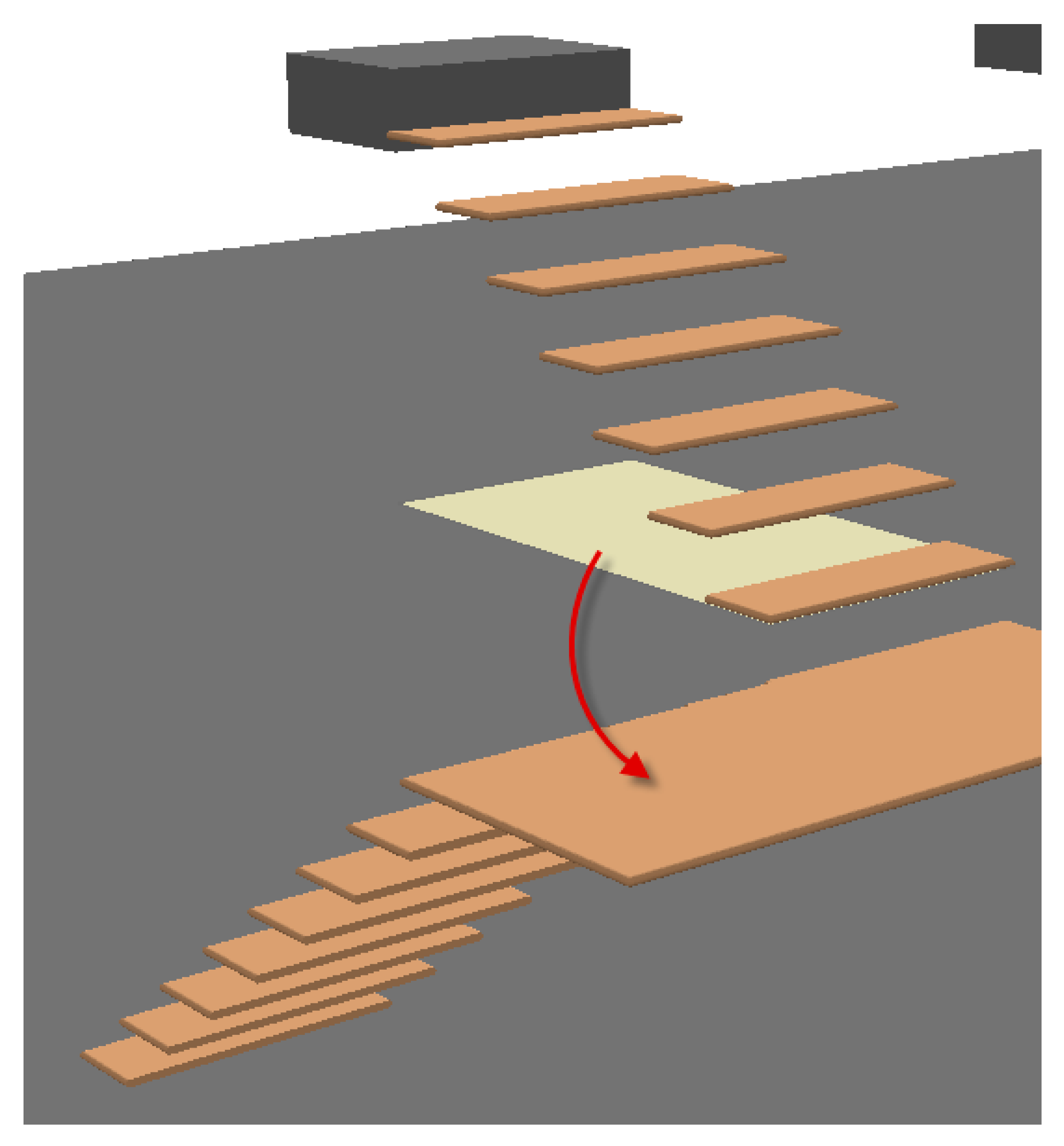
- Generate the “minimal bounding volume” of the stair flight, as shown in the gray box of Figure 3. Thereafter, extract the top and bottom surfaces of this bounding volume, extract all sides of these surfaces, and then generate the midpoints of each side, as shown by the blue points (top surface) and purple points (bottom surface) in Figure 3;
- Step 2:
- Determine the candidates for the start and end of the stair path (as shown by S′ and E′ in Figure 3) by performing a 3D intersection on the eight midpoints in Step 1 with the stair flight;
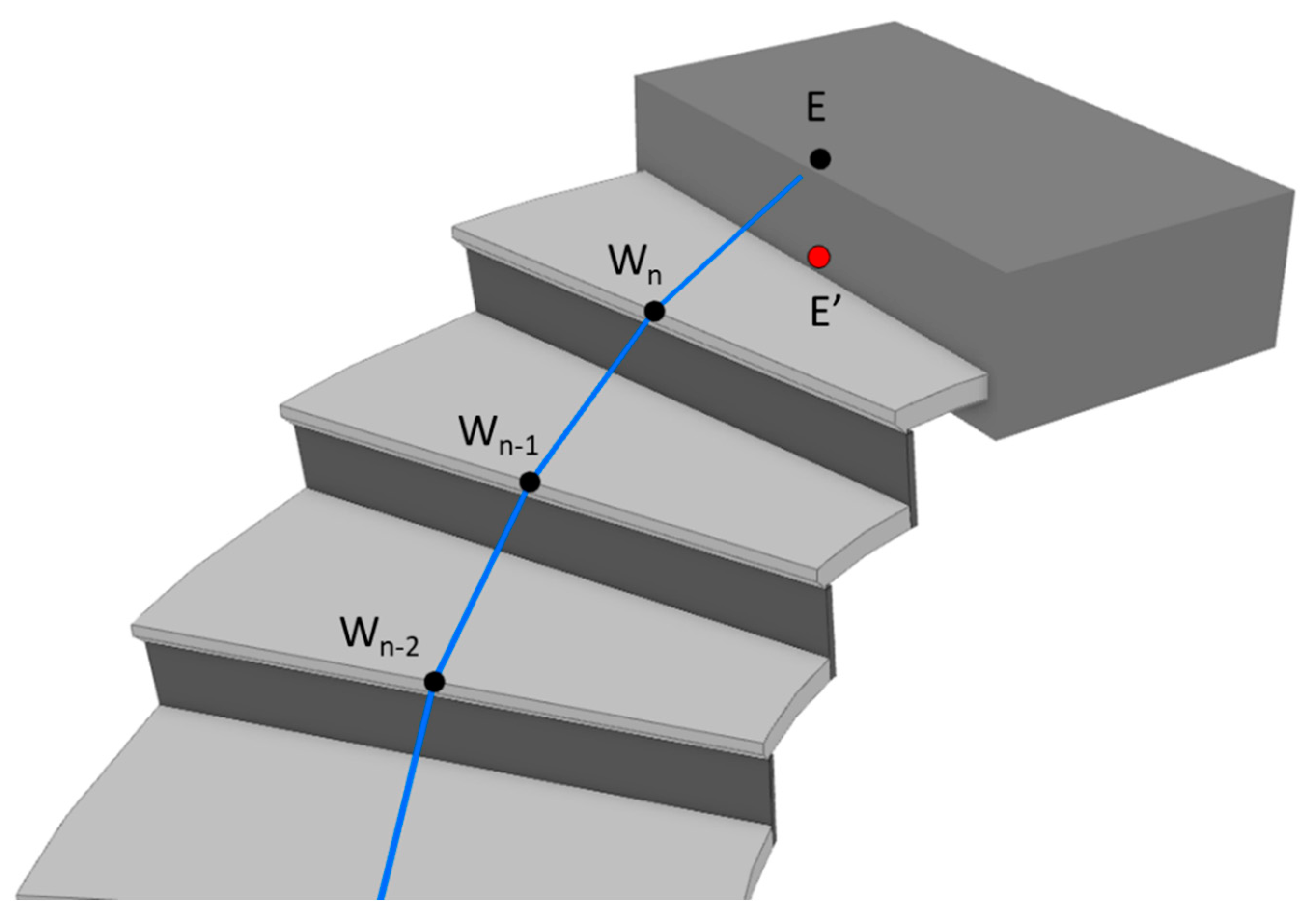
- Step 3:
- Create the path end (as shown by E in Figure 3) by searching the nearest landing or slab to Point E′, obtained in Step 2, and adjusting the elevation of Point E′ as high as the selected landing or slab. Point E is the endpoint of the stair flight path;
- Step 4:
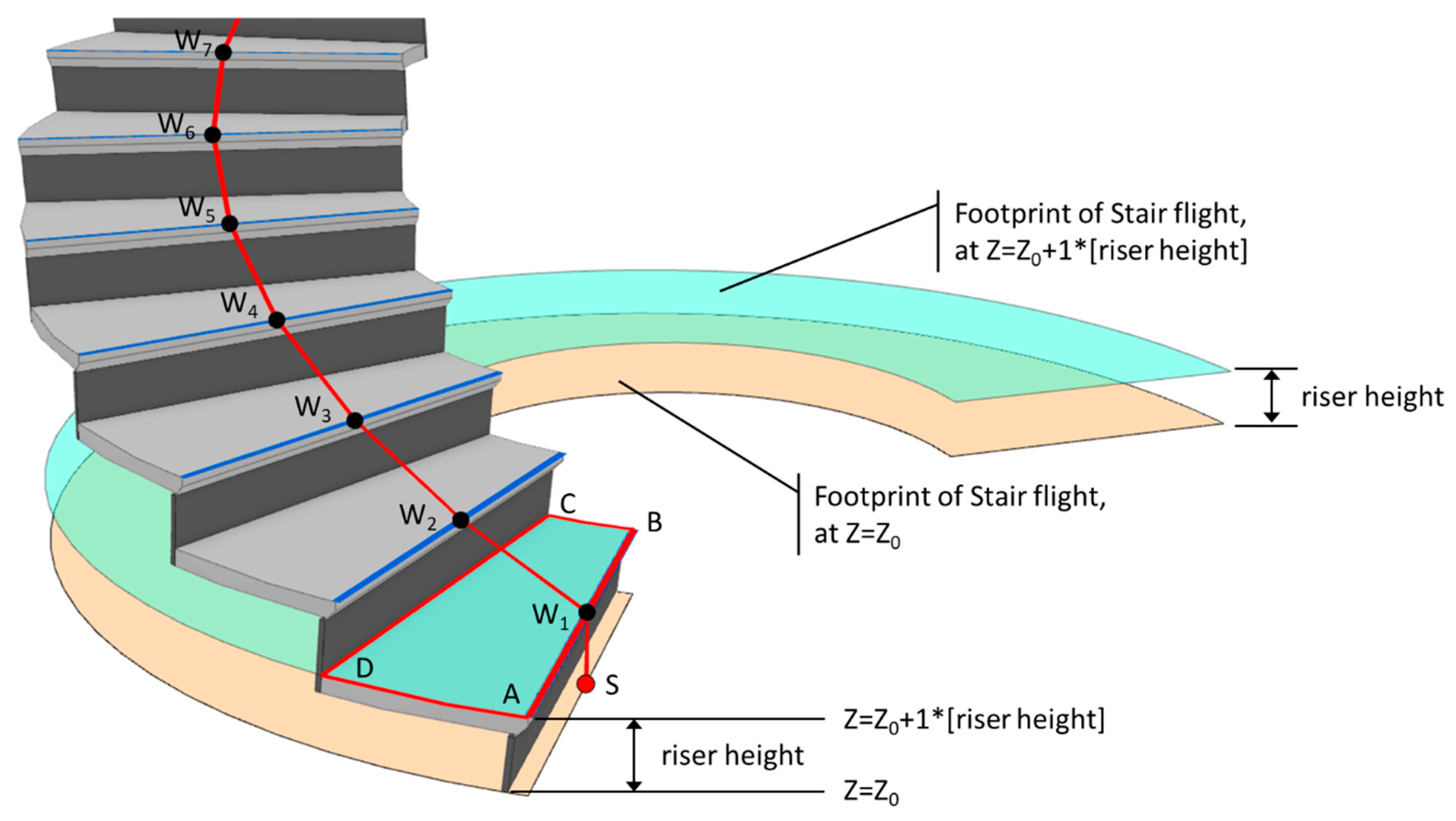
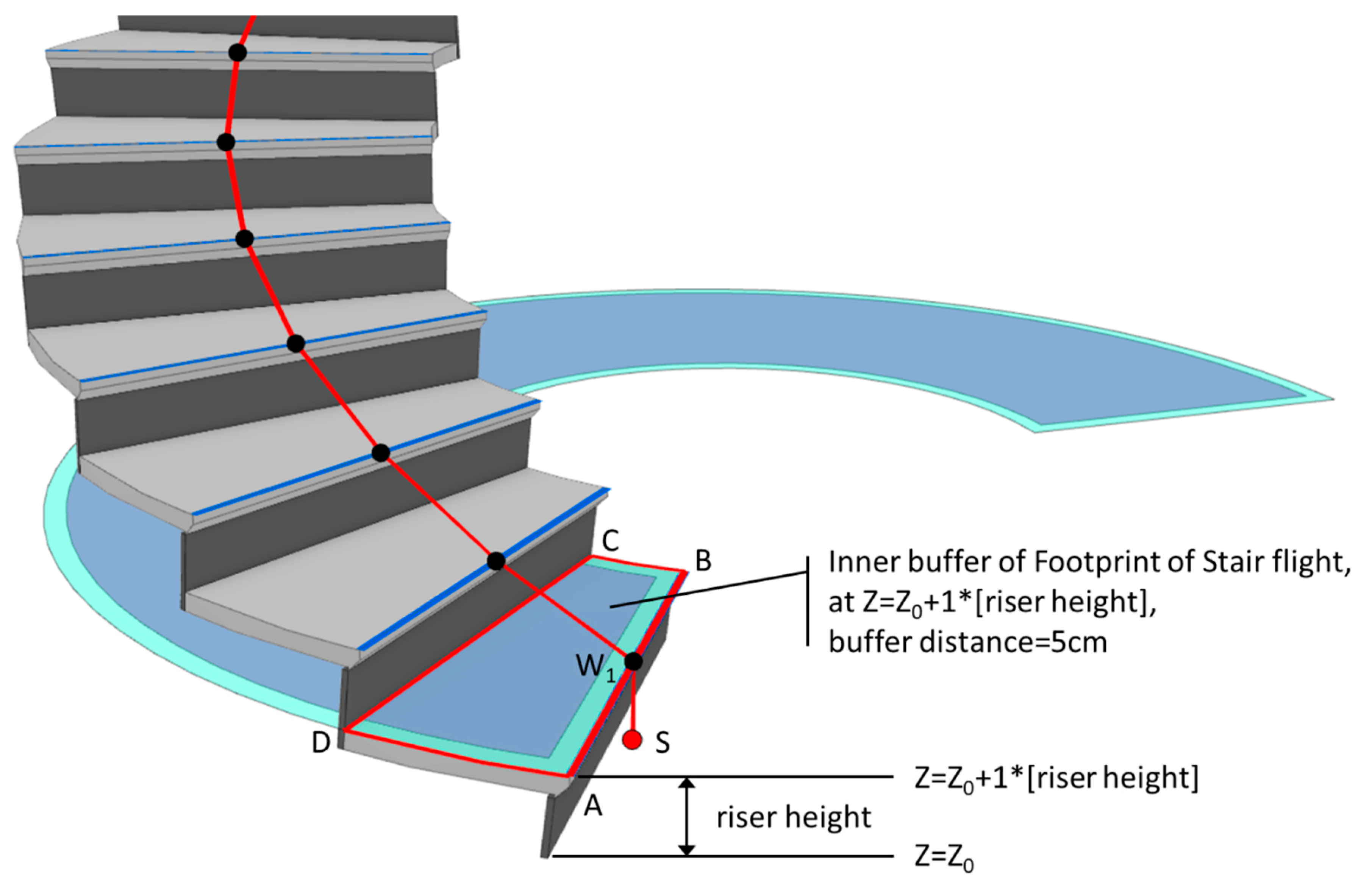
- Create the path start (as shown by S in Figure 3) by searching the nearest landing or slab to Point S′ obtained in Step 2 and adjusting the elevation of Point S′ as high as the selected landing or slab. Point S then is the starting point of the stair flight path;
- Step 5:
- Create the waypoint of the run path (as shown by M in Figure 3) by lifting up the elevation of Point S obtained in Step 4 by one step height. Point M then is the waypoint of the stair flight path;
- Step 6:
- Generate the stair flight path by linking up the start point (S), waypoint (M), and endpoint (E) obtained in Step 3–Step 5. The resulting segments are the stair flight path, as shown by the red polyline of Figure 3.
3. Requirements and Considerations
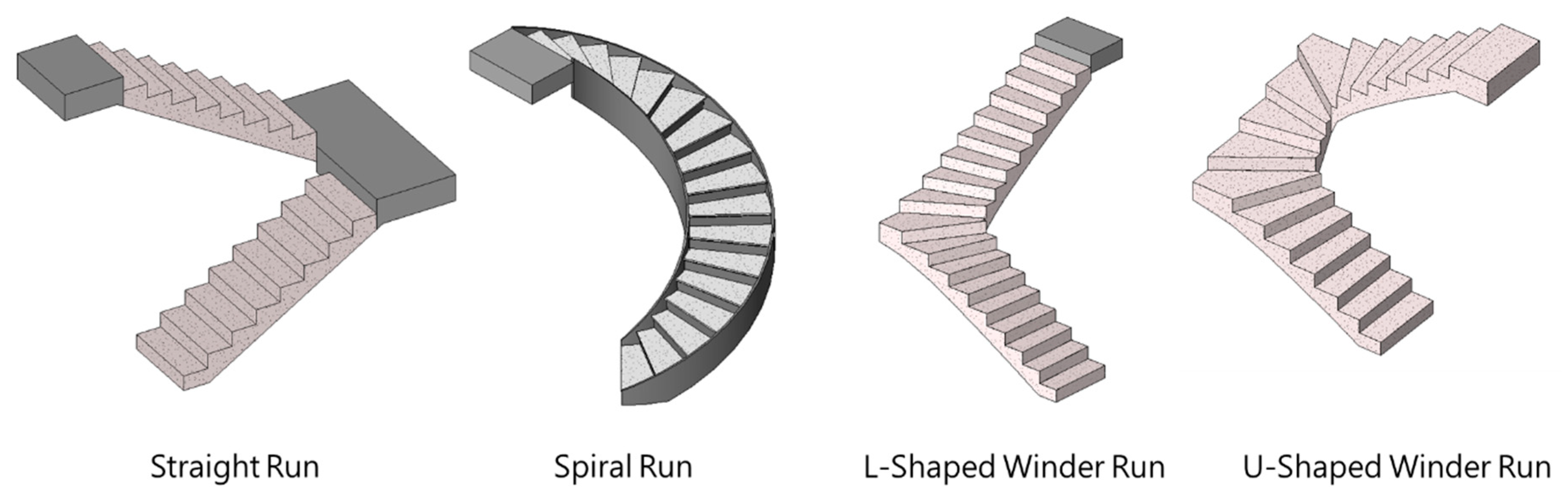
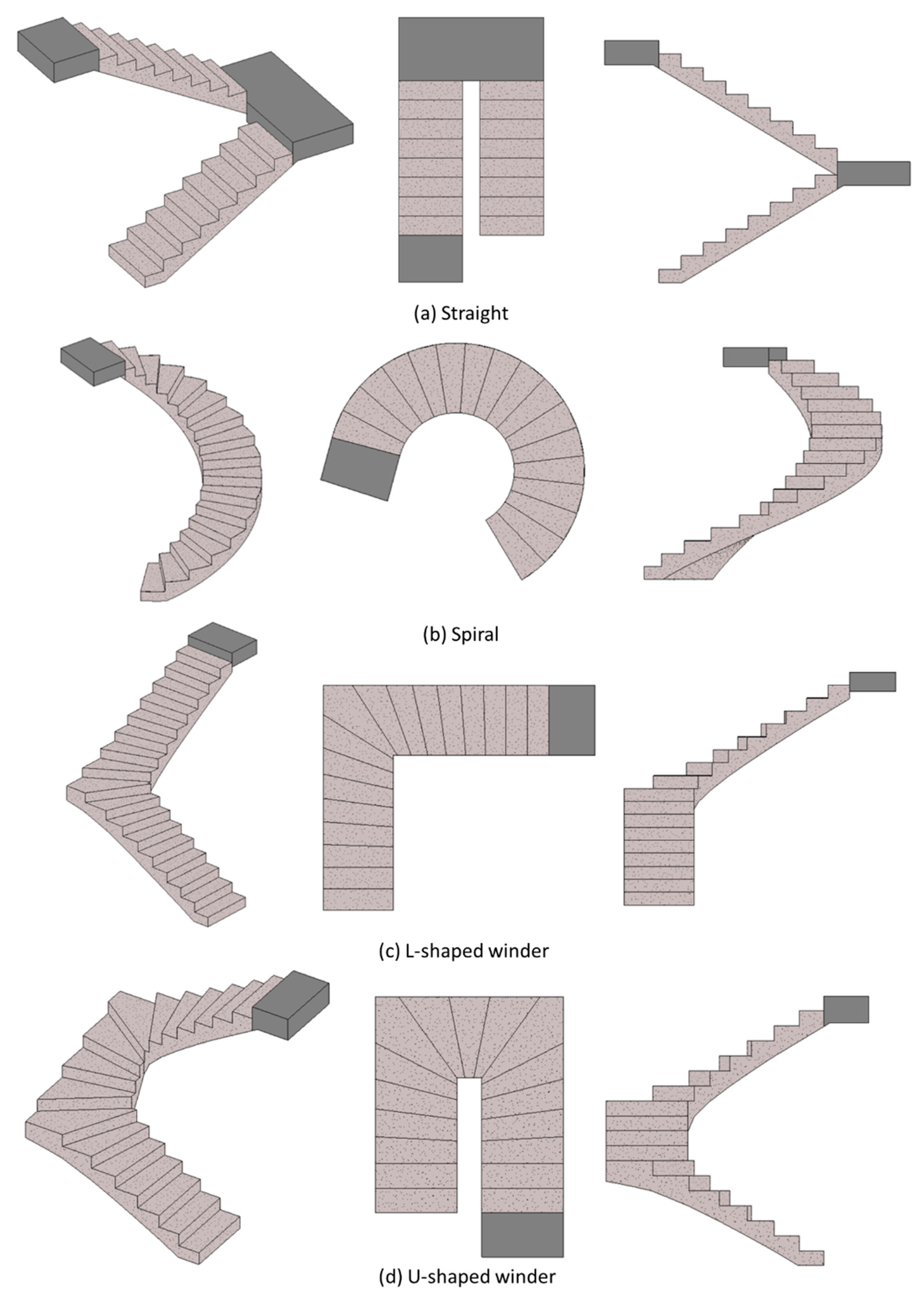
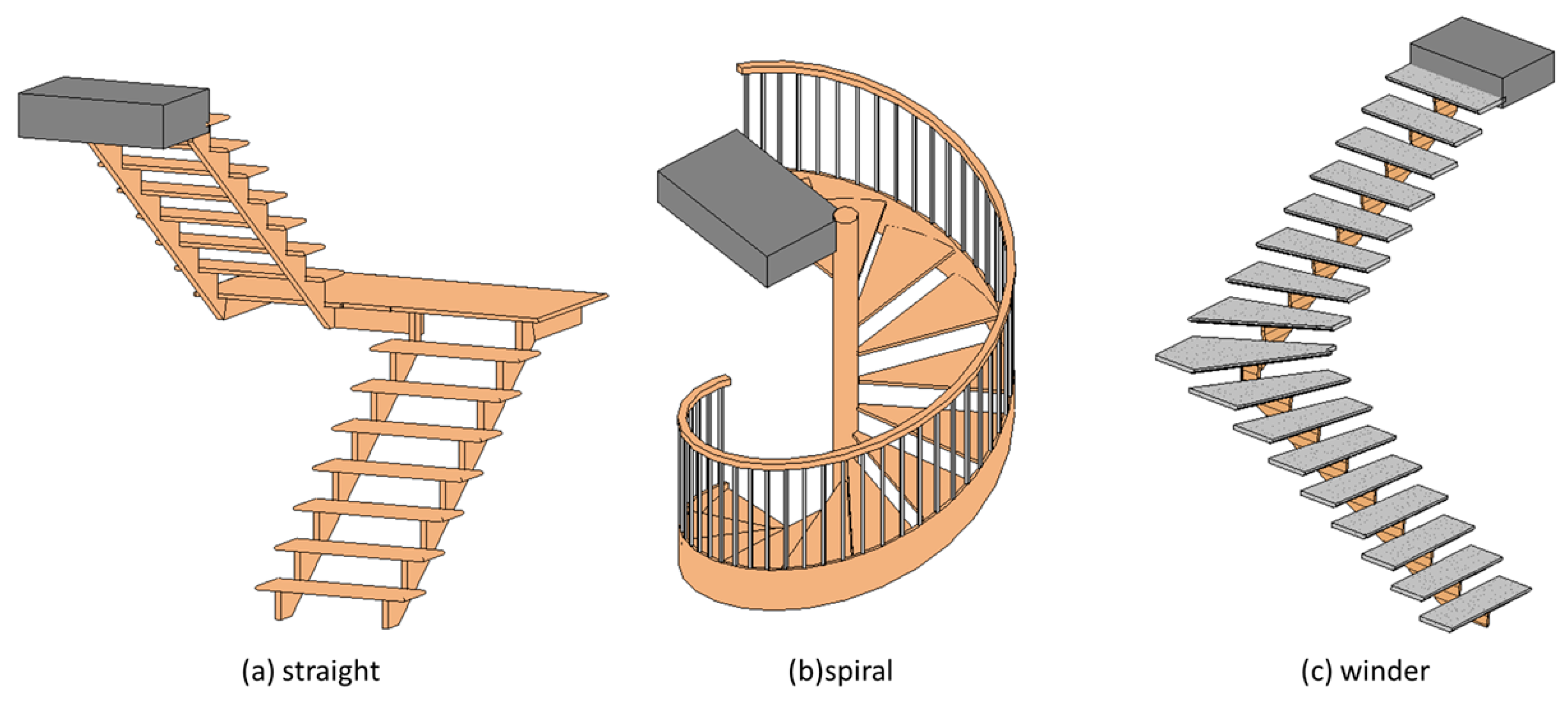
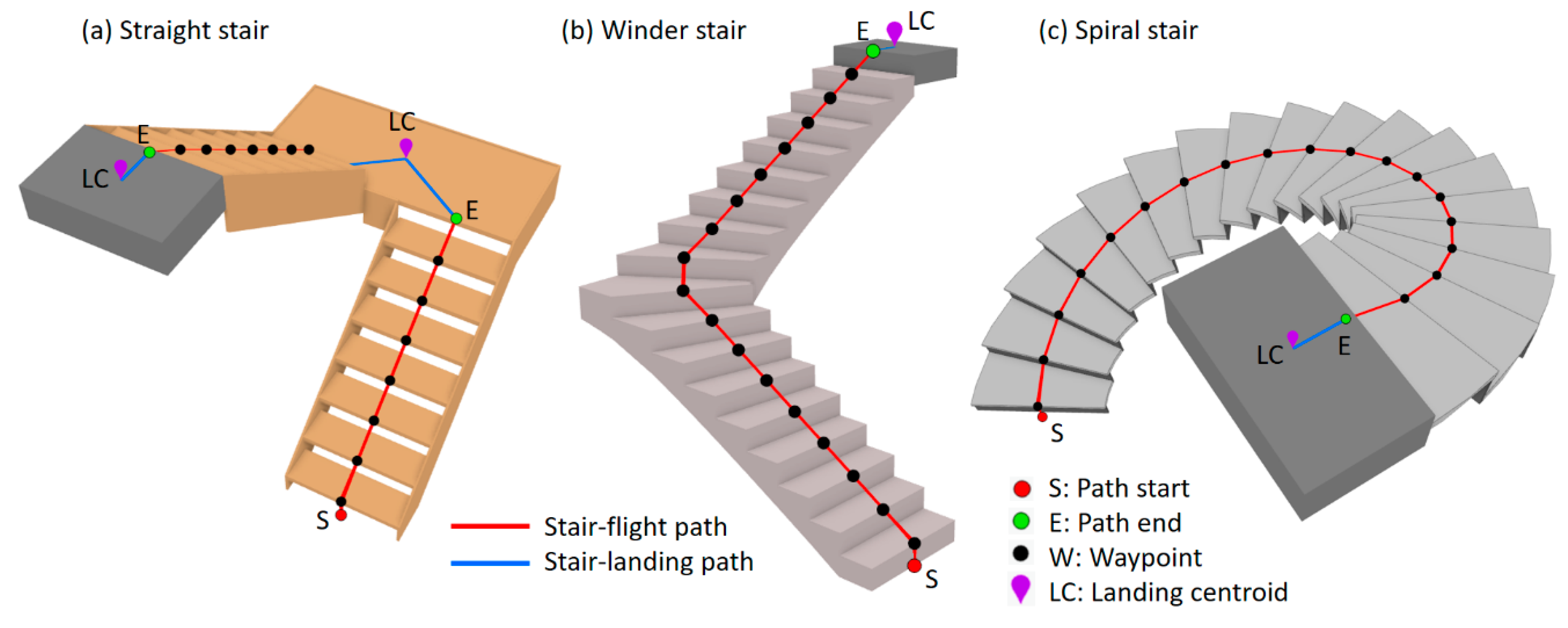
3.1. Run Orientation
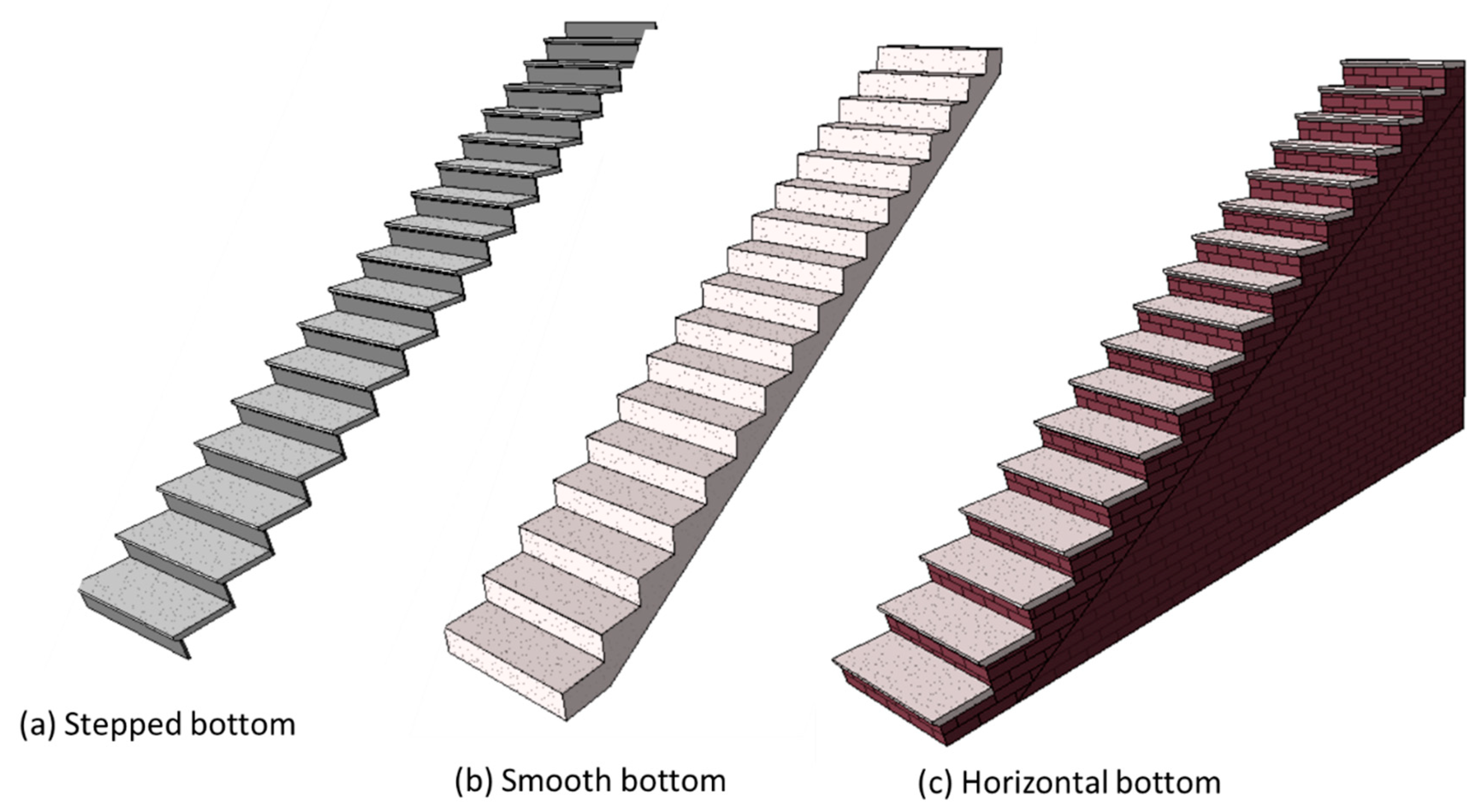
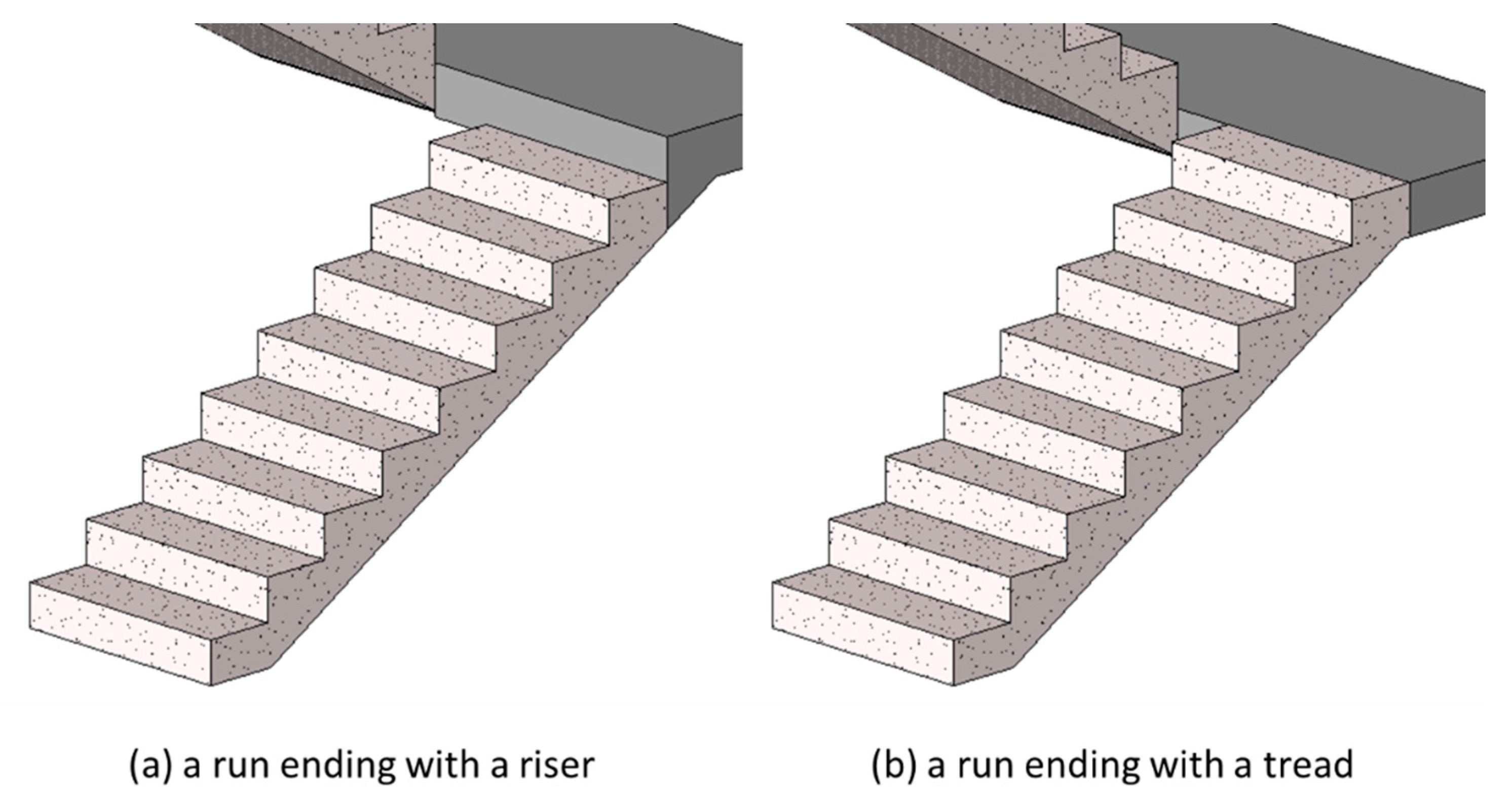
3.2. Run Structure
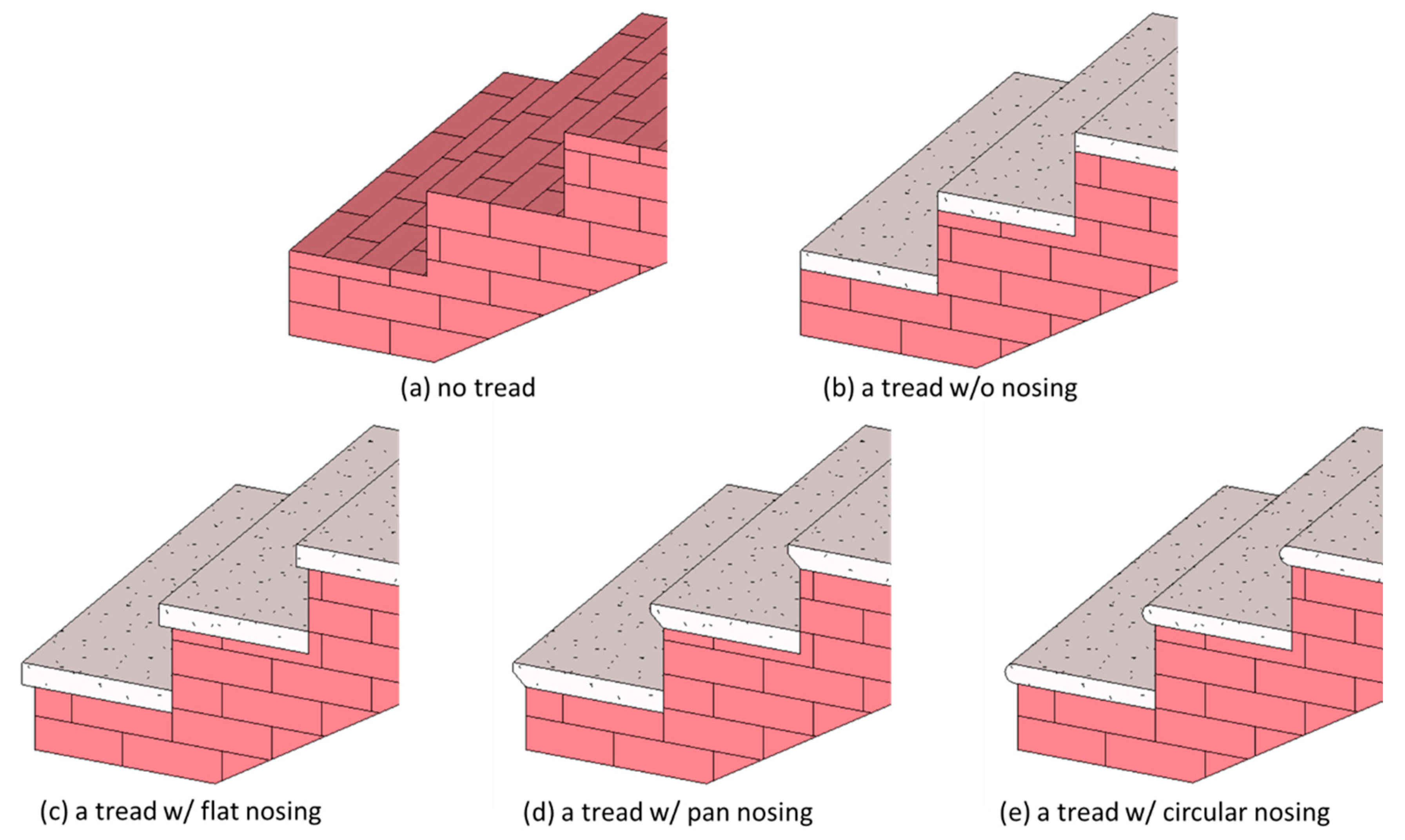
3.3. Treads
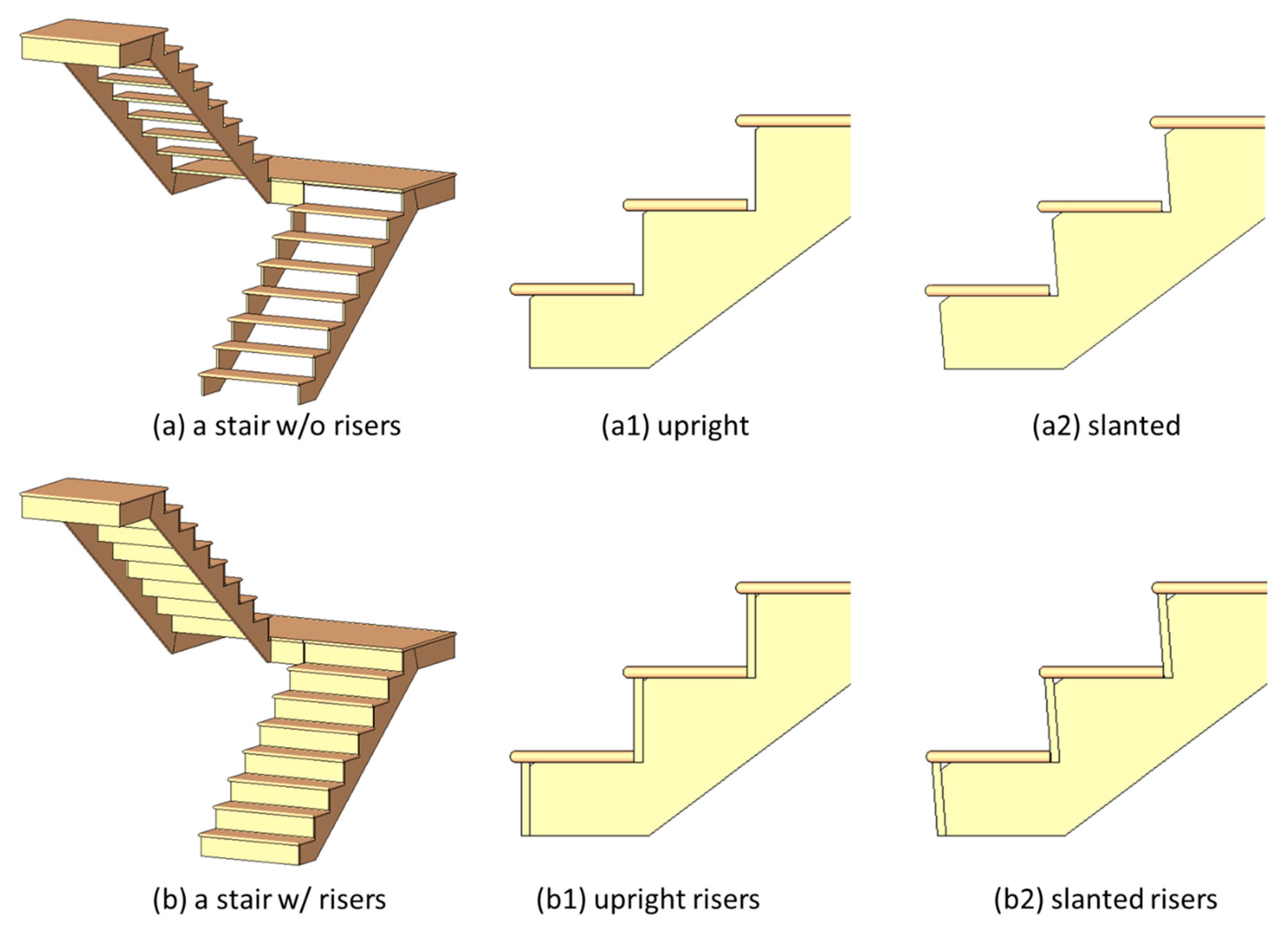
3.4. Risers
4. Implementation
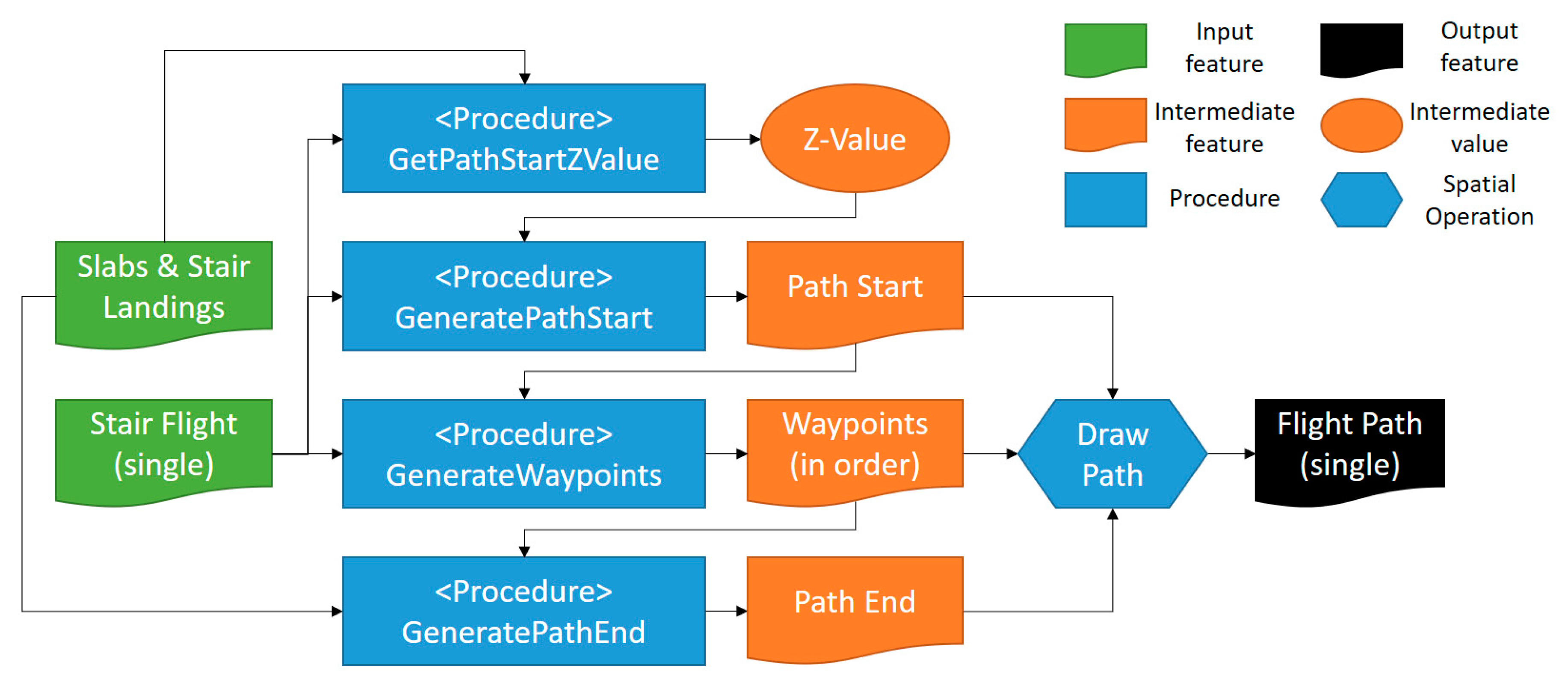
4.1. Overview and Notation
4.2. Algorithm Logic
4.2.1. GetPathStartZValue
4.2.2. GeneratePathStart and GeneratePathWaypoints
4.2.3. GeneratePathEnd
5. Verification
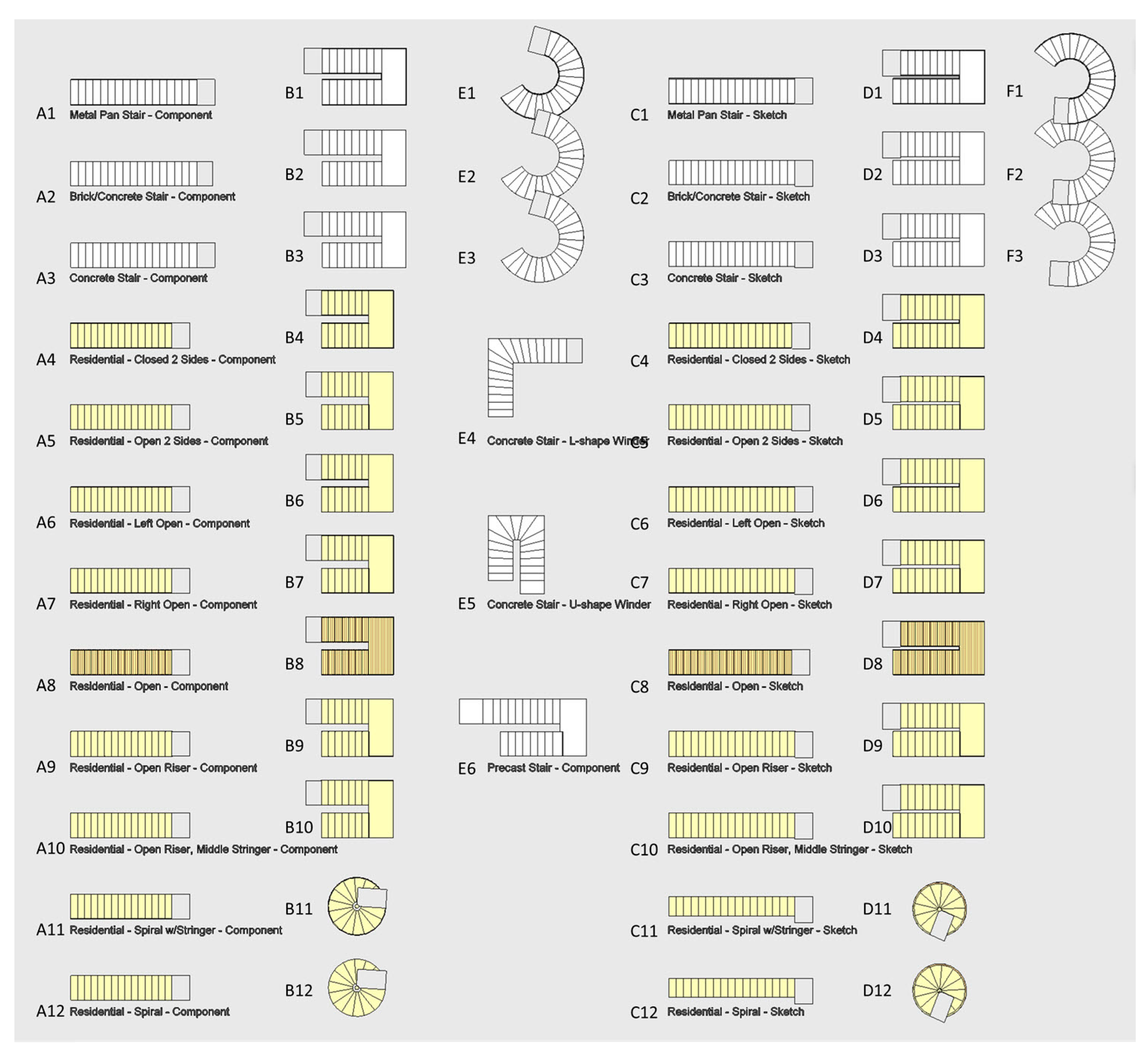
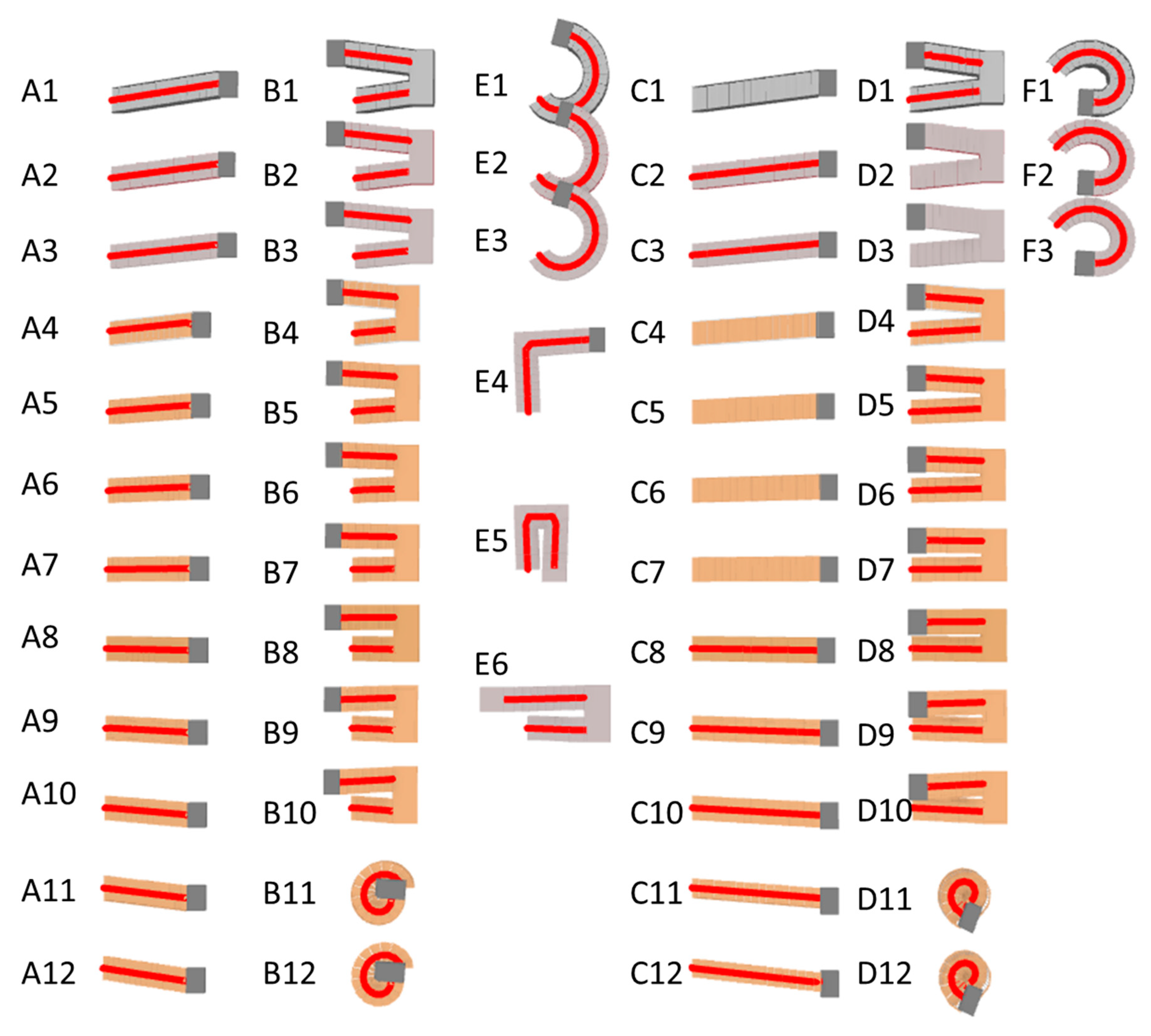
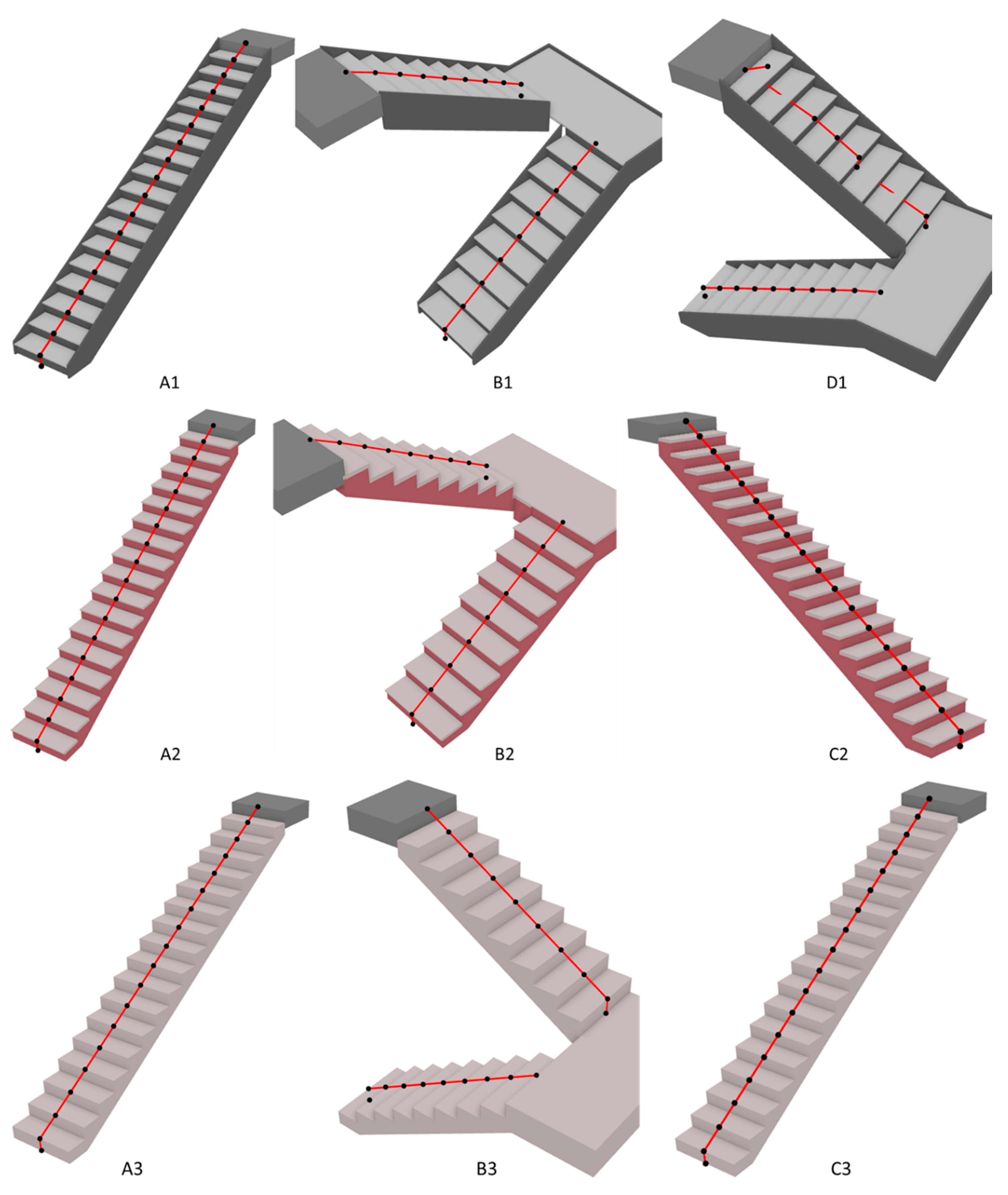
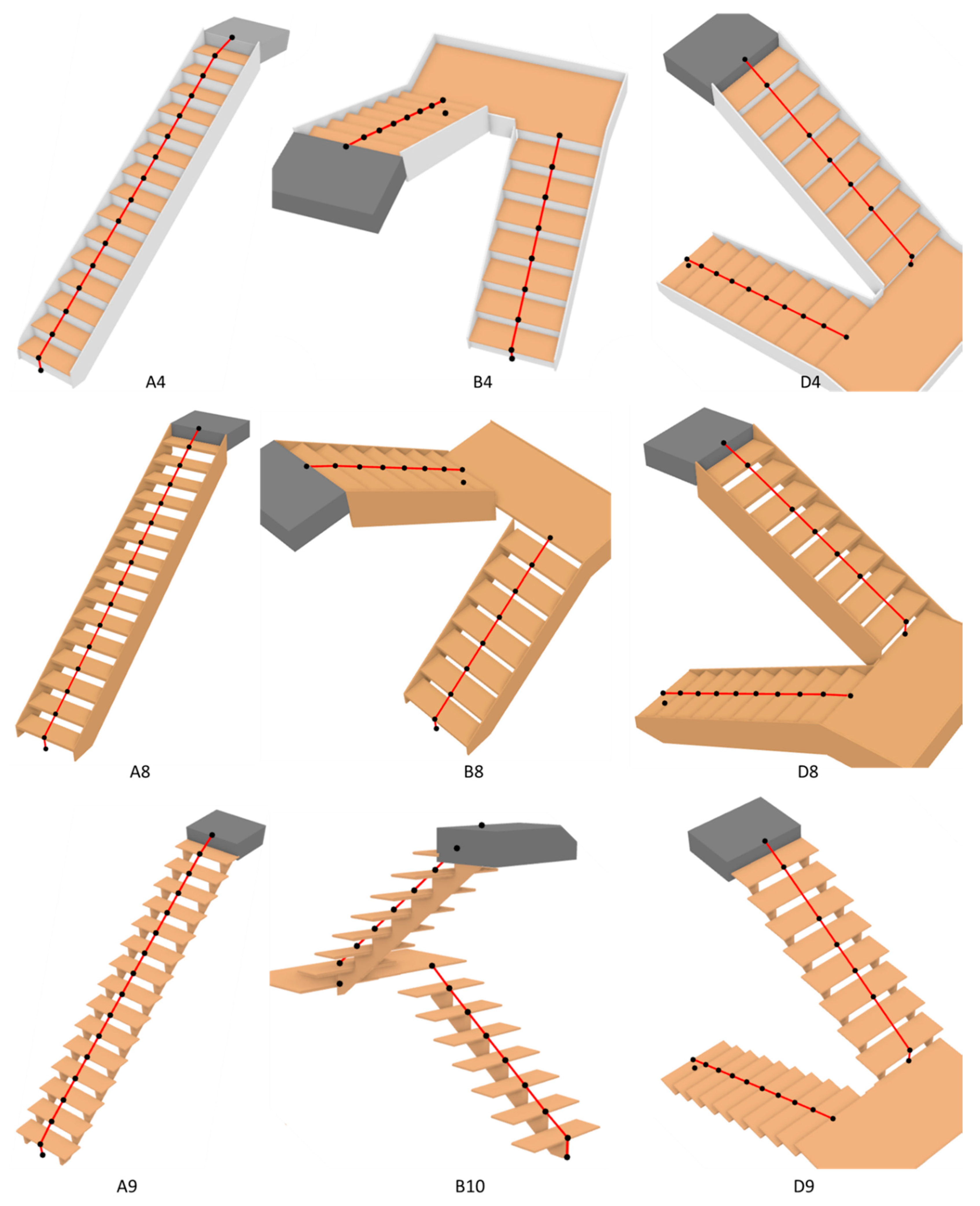
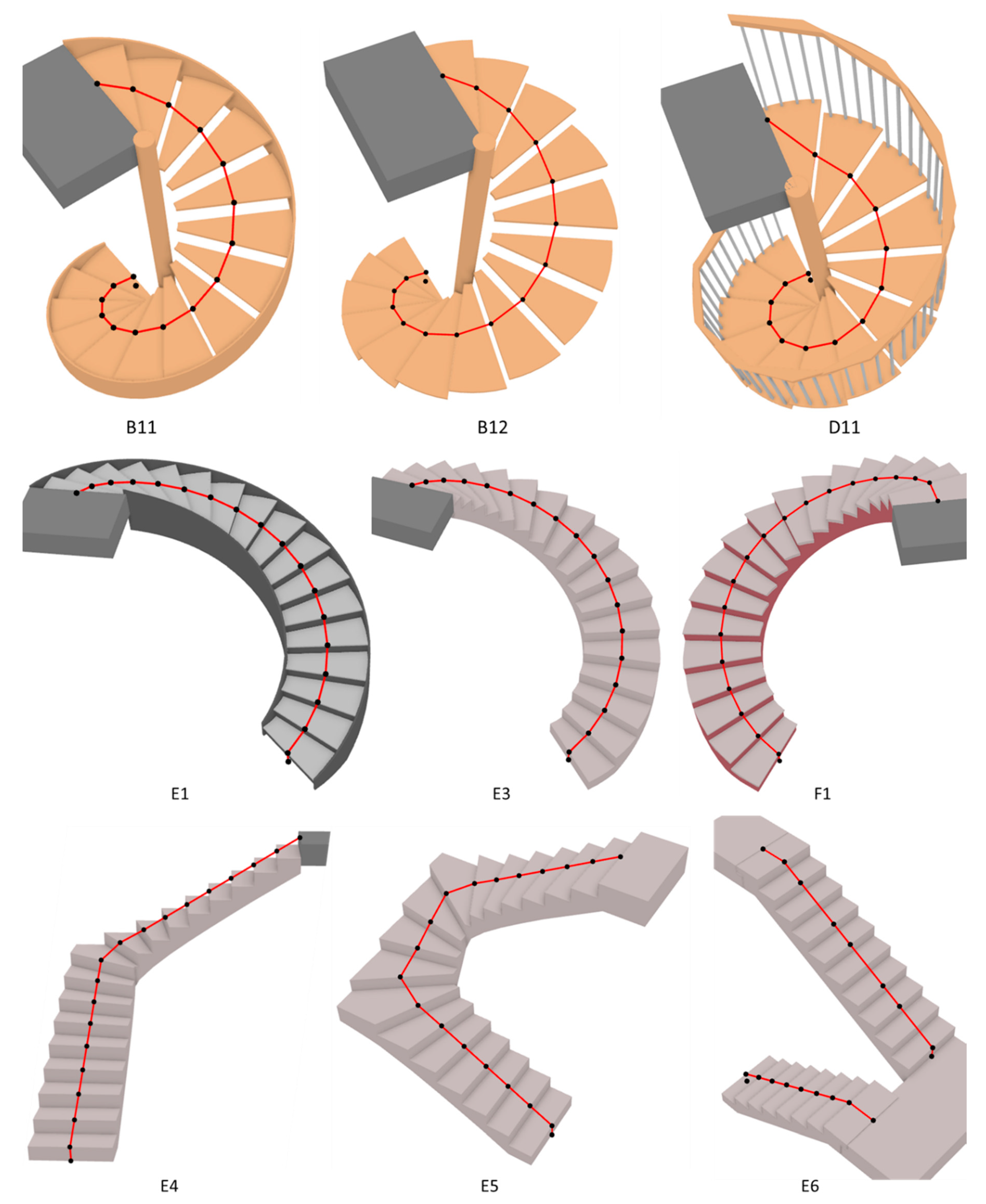
5.1. Test Cases
5.2. Test Results
6. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Lin, W.Y.; Lin, P.H. Intelligent generation of indoor topology (i-GIT) for human indoor pathfinding based on IFC models and 3D GIS technology. Autom. Constr. 2018, 94, 340–359. [Google Scholar] [CrossRef]
- Zlatanova, S.; Liu, L.; Sithole, G.; Zhao, J.; Mortari, F. Space Subdivision for indoor Applications; Delft University of Technology, OTB Research Institute for the Built Environment: Delft, The Netherlands, 2014. [Google Scholar]
- Gunduz, M.; Isikdag, U.; Basaraner, M. A Review of recent research in indoor modelling & mapping. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2016, 41, 289–294. [Google Scholar]
- Worboys, M.; Walton, L. Towards A Model of Indoor Space; University of Maine: Orono, ME, USA, 2008. [Google Scholar]
- Ma, Z.; Ren, Y. Integrated Application of BIM and GIS: An Overview. Procedia Eng. 2017, 196, 1072–1079. [Google Scholar] [CrossRef]
- Yan, W.; Culp, C.; Graf, R. Integrating BIM and gaming for real-time interactive architectural visualization. Autom. Constr. 2011, 20, 446–458. [Google Scholar] [CrossRef]
- Lin, Y.-H.; Liu, Y.-S.; Gao, G.; Han, X.-G.; Lai, C.-Y.; Gu, M. The IFC-based path planning for 3D indoor spaces. Adv. Eng. Inform. 2013, 27, 189–205. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Q.; Li, Y.; Xiong, Q.; Zlatanova, S.; Ding, Y.; Zhang, Y.; Zhou, Y. Indoor Multi-Dimensional Location GML and Its Application for Ubiquitous Indoor Location Services. ISPRS Int. J. Geo-Inf. 2016, 5, 220. [Google Scholar] [CrossRef] [Green Version]
- Xu, M.; Wei, S.; Zlatanova, S.; Zhang, R. BIM-Based indoor path planning considering obstacles. Isprs Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, 417–423. [Google Scholar] [CrossRef] [Green Version]
- Hijazi, I.; Ehlers, M.; Zlatanova, S. BIM for geo-analysis (BIM4GEOA): Set up of 3D information system with open source software and open specification (OS). In Proceedings of the 5th International 3D GeoInfo Conference, Berlin, Germany, 3–4 November 2010. [Google Scholar]
- Lee, J. A Three-Dimensional Navigable Data Model to Support Emergency Response in Microspatial Built-Environments. Ann. Assoc. Am. Geogr. 2007, 97, 512–529. [Google Scholar] [CrossRef]
- Tashakkori, H.; Rajabifard, A.; Kalantari, M. A new 3D indoor/outdoor spatial model for indoor emergency response facilitation. Build. Environ. 2015, 89, 170–182. [Google Scholar] [CrossRef]
- Xiong, Q.; Zhu, Q.; Du, Z.; Zhu, X.; Zhang, Y.; Niu, L.; Li, Y.; Zhou, Y. A Dynamic Indoor Field Model for Emergency Evacuation Simulation. ISPRS Int. J. Geo-Inf. 2017, 6, 104. [Google Scholar] [CrossRef]
- Afyouni, I.; Ray, C.; Claramunt, C. Spatial models for context-aware indoor navigation systems: A survey. J. Spat. Inf. Sci. 2012, 4, 85–123. [Google Scholar] [CrossRef] [Green Version]
- Zlatanova, S.; Sithole, G.; Nakagawa, M.; Zhu, Q. Problems In Indoor Mapping and Modelling. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2013, 4, 63–68. [Google Scholar] [CrossRef] [Green Version]
- Becker, T.; Nagel, C.; Kolbe, T.H. A Multilayered Space-Event Model for Navigation in Indoor Spaces; Springer: Berlin/Heidelberg, Germany, 2008; pp. 61–77. [Google Scholar]
- Teo, T.-A.; Cho, K.-H. BIM-oriented indoor network model for indoor and outdoor combined route planning. Adv. Eng. Informatics 2016, 30, 268–282. [Google Scholar] [CrossRef]
- Liu, L.; Zlatanova, S. Towards a 3D network model for indoor navigation. In Urban and Regional Data Management; CRC Press: Delft, The Netherlands, 2011; pp. 79–94. [Google Scholar]
- Isikdag, U.; Zlatanova, S.; Underwood, J. A BIM-Oriented Model for supporting indoor navigation requirements. Comput. Environ. Urban Syst. 2013, 41, 112–123. [Google Scholar] [CrossRef]
- Diakite, A.A.; Zlatanova, S. Spatial subdivision of complex indoor environments for 3D indoor navigation. Int. J. Geogr. Inf. Sci. 2017, 32, 213–235. [Google Scholar] [CrossRef] [Green Version]
- Park, S.; Yu, K.; Kim, J. Data Model for IndoorGML Extension to Support Indoor Navigation of People with Mobility Disabilities. ISPRS Int. J. Geo-Inf. 2020, 9, 66. [Google Scholar] [CrossRef] [Green Version]
- Taneja, S.; Akinci, B.; Garrett, J.H.; Soibelman, L. Algorithms for automated generation of navigation models from building information models to support indoor map-matching. Autom. Constr. 2016, 61, 24–41. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Worboys, M. Generation of navigation graphs for indoor space. Int. J. Geogr. Inf. Sci. 2015, 29, 1–20. [Google Scholar] [CrossRef]
- Tang, S.J.; Zhu, Q.; Wang, W.W.; Zhang, Y.T. automatic topology derivation from ifc building model for IN-door Intelligent navigation. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2015, 7–11. [Google Scholar] [CrossRef] [Green Version]
- Lewandowicz, E.; Lisowski, P.; Flisek, P. A Modified Methodology for Generating Indoor Navigation Models. ISPRS Int. J. Geo-Inf. 2019, 8, 60. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.Y.; Lin, P.-H.; Tserng, H. Automating the Generation of Indoor Space Topology for 3D Route Planning Using BIM and 3D-GIS Techniques. In Proceedings of the 34th International Symposium on Automation and Robotics in Construction, Taipei, Taiwan, 28 June–1 July 2017; pp. 437–444. [Google Scholar]
- Zheng, X.Z.; Tian, D.; Zhang, M.; Hu, C.; Tong, L. A Stairs Evacuation Model Considering the Pedestrian Merging Flows. Discret. Dyn. Nat. Soc. 2019, 2019, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Thill, J.-C.; Dao, T.H.D.; Zhou, Y. Traveling in the three-dimensional city: Applications in route planning, accessibility assessment, location analysis and beyond. J. Transp. Geogr. 2011, 19, 405–421. [Google Scholar] [CrossRef]
- Roh, S.; Aziz, Z.; Pena-Mora, F.A. An object-based 3D walk-through model for interior construction progress monitoring. Autom. Constr. 2011, 20, 66–75. [Google Scholar] [CrossRef]
- Sano, T.; Yajima, M.; Kadokura, H.; Sekizawa, A. Human behavior in a staircase during a total evacuation drill in a high-rise building. Fire Mater. 2016, 41, 375–386. [Google Scholar] [CrossRef]
- Köster, G.; Lehmberg, D.; Kneidl, A. Walking on stairs: Experiment and model. Phys. Rev. E 2019, 100, 022310. [Google Scholar] [CrossRef] [PubMed]
- Tsiliakou, E.; Dimopoulou, E. 3D Network Analysis for Indoor Space Applications. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2016, 2, 147–154. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.Y. The generation of an indoor network with non-level paths based on IFC-models and its practical applications. J. Chin. Inst. Civil Hydraul. Eng. 2019, 31, 153–162. [Google Scholar] [CrossRef]
- Wang, Y.Q.; Lin, W.Y. An extension of intelligent generation of indoor topology (i-GIT) for non-level paths associated with ramps and elevators. In Proceedings of the 22nd Symposium on Construction Engineering and Management, Taipei, Taiwan, 6 July 2018. [Google Scholar]
- Kang, T.W.; Hong, C.H. A study on software architecture for effective BIM/GIS-based facility management data integration. Autom. Constr. 2015, 54, 25–38. [Google Scholar] [CrossRef]
- Galea, E.R.; Sharp, G.; Lawrence, P. Investigating the Representation of Merging Behavior at the Floor--Stair Interface in Computer Simulations of Multi-Floor Building Evacuations. J. Fire Prot. Eng. 2008, 18, 291–316. [Google Scholar] [CrossRef]
- Revit Sample Stair and Railing Files. Available online: http://revit.downloads.autodesk.com/download/2019RVT_RTM/Docs/InProd/Stair_Samples.rvt (accessed on 23 December 2019).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stair Run Orientation | Stair Modeling Parameters | Value | i-GIT Version 1 | i-GIT Version 2 | This Study |
|---|---|---|---|---|---|
| Straight | Run structure | Monolithic | v | v | v |
| Non-monolithic | v | v | |||
| Tread | No tread | v | v | v | |
| Treads w/o nosing | v | v | v | ||
| Treads w/nosing | v | v | |||
| Riser | No riser (upright) | v | v | v | |
| No riser (slanted) | v | v | |||
| Upright/slanted risers | v | v | |||
| Ends w/a riser | v | v | v | ||
| Ends w/a tread | v | v | |||
| Spiral | Run structure | Monolithic | v | ||
| Non-monolithic | v | ||||
| Tread | No tread | v | |||
| Treads w/o nosing | v | ||||
| Treads w/nosing | v | ||||
| Riser | No riser (upright) | v | |||
| No riser (slanted) | v | ||||
| Upright/slanted risers | v | ||||
| Ends w/a riser | v | ||||
| Ends w/a tread | v | ||||
| Winder | Run structure | Monolithic | v | ||
| Non-monolithic | v | ||||
| Tread | No tread | v | |||
| Tread w/o nosing | v | ||||
| Treads w/nosing | v | ||||
| Riser | No riser (upright) | v | |||
| No riser (slanted) | v | ||||
| Upright/slanted risers | v | ||||
| Ends w/a riser | v | ||||
| Ends w/a tread | v |
| Test Group No. | Case No. | Run Orientation | Run structure | Tread | Riser | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Monolithic | Non-Monolithic | No Tread | Tread w/o Nosing | Treads w/Nosing | No Riser | No Riser (Upright/Slanted) | Upright/Slanted Risers | Ends w/a Riser | Ends w/a Tread | |||
| 1 | ABD1 | S | V | P | S | V | ||||||
| 2 | ABC2 | S | ST | P | U | V | ||||||
| 3 | ABC3 | S | SM | V | U | V | ||||||
| 4 | ABD4–7 | S | V | R | U | V | ||||||
| 5 | ABCD8, AC11–12 | S | V | F | V | V | ||||||
| 6 | ABCD9–10 | S | V | R | V | V | ||||||
| 7 | BD11–12 | P | V | F | V | V | ||||||
| 8 | EF1 | P | V | P | S | V | ||||||
| 9 | EF2 | P | ST | P | U | V | ||||||
| 10 | EF3 | P | SM | V | U | V | ||||||
| 11 | E4 | WL | SM | V | U | V | ||||||
| 12 | E5 | WU | SM | V | U | V | ||||||
| 13 | E6 | S | SM | V | U | V | ||||||
| Case No. | IFC Data Anomaly | Path Start | Waypoints | Path End | Path |
|---|---|---|---|---|---|
| C1, C4–C7 | IFCSTAIR | not applicable | |||
| D2, D3 | Incorrect Attributes | not applicable | |||
| D1 | None | correct | incorrect | incorrect | incorrect |
| D4–D10 | None | correct | 2 missing | correct | correct |
| E6 | None | correct | 3 missing | correct | correct |
| Others | None | correct | |||
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, W.Y. Automatic Generation of High-Accuracy Stair Paths for Straight, Spiral, and Winder Stairs Using IFC-Based Models. ISPRS Int. J. Geo-Inf. 2020, 9, 215. https://doi.org/10.3390/ijgi9040215
Lin WY. Automatic Generation of High-Accuracy Stair Paths for Straight, Spiral, and Winder Stairs Using IFC-Based Models. ISPRS International Journal of Geo-Information. 2020; 9(4):215. https://doi.org/10.3390/ijgi9040215
Chicago/Turabian StyleLin, Will Y. 2020. "Automatic Generation of High-Accuracy Stair Paths for Straight, Spiral, and Winder Stairs Using IFC-Based Models" ISPRS International Journal of Geo-Information 9, no. 4: 215. https://doi.org/10.3390/ijgi9040215
APA StyleLin, W. Y. (2020). Automatic Generation of High-Accuracy Stair Paths for Straight, Spiral, and Winder Stairs Using IFC-Based Models. ISPRS International Journal of Geo-Information, 9(4), 215. https://doi.org/10.3390/ijgi9040215