Hierarchical Behavior Model for Multi-Agent System with Evasion Capabilities and Dynamic Memory


Abstract
:1. Introduction
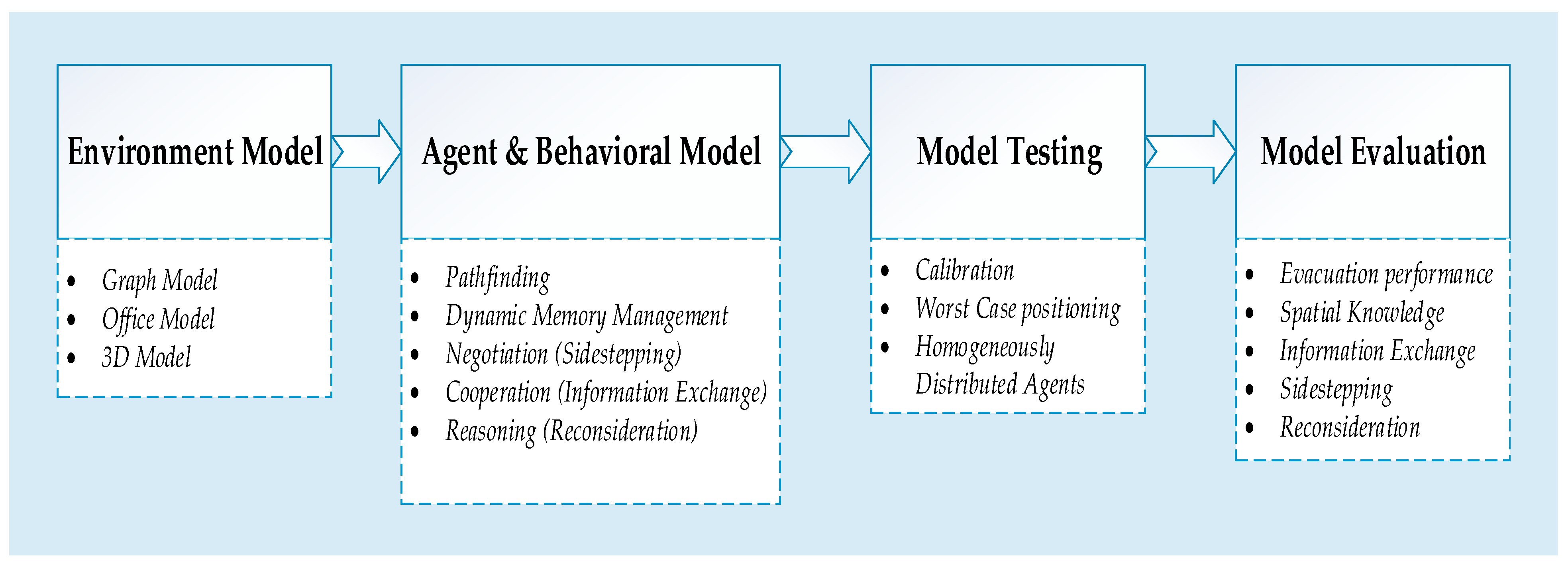
2. Materials and Methods
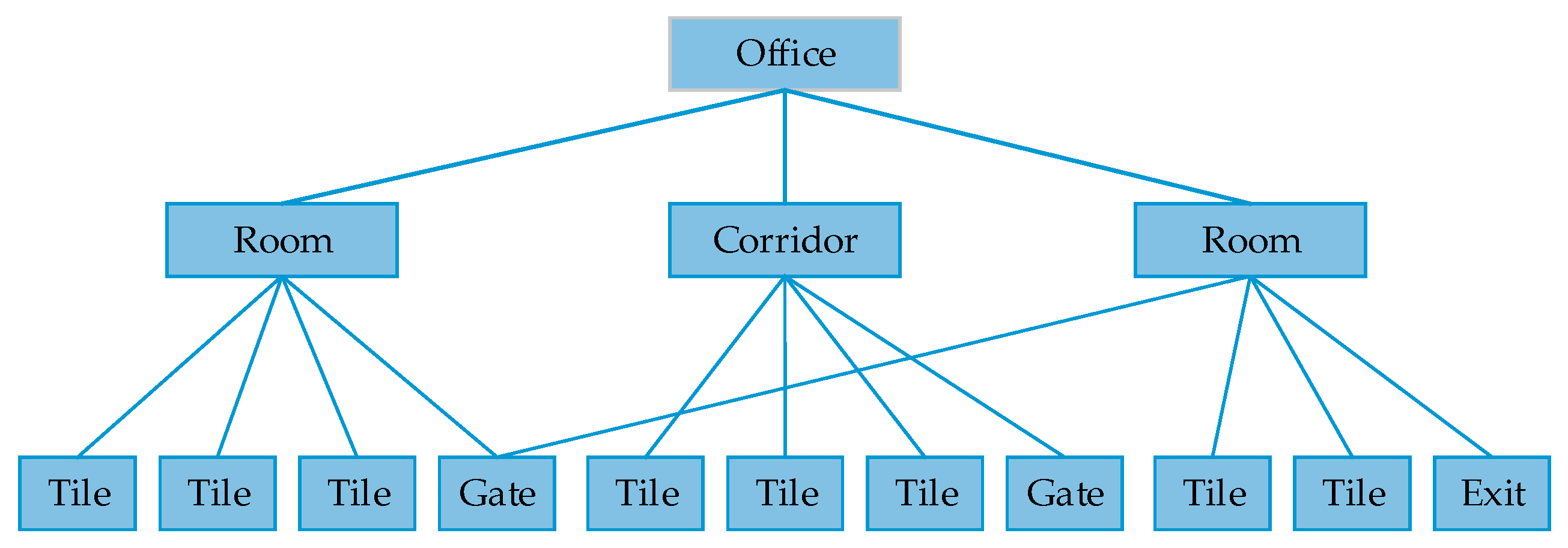
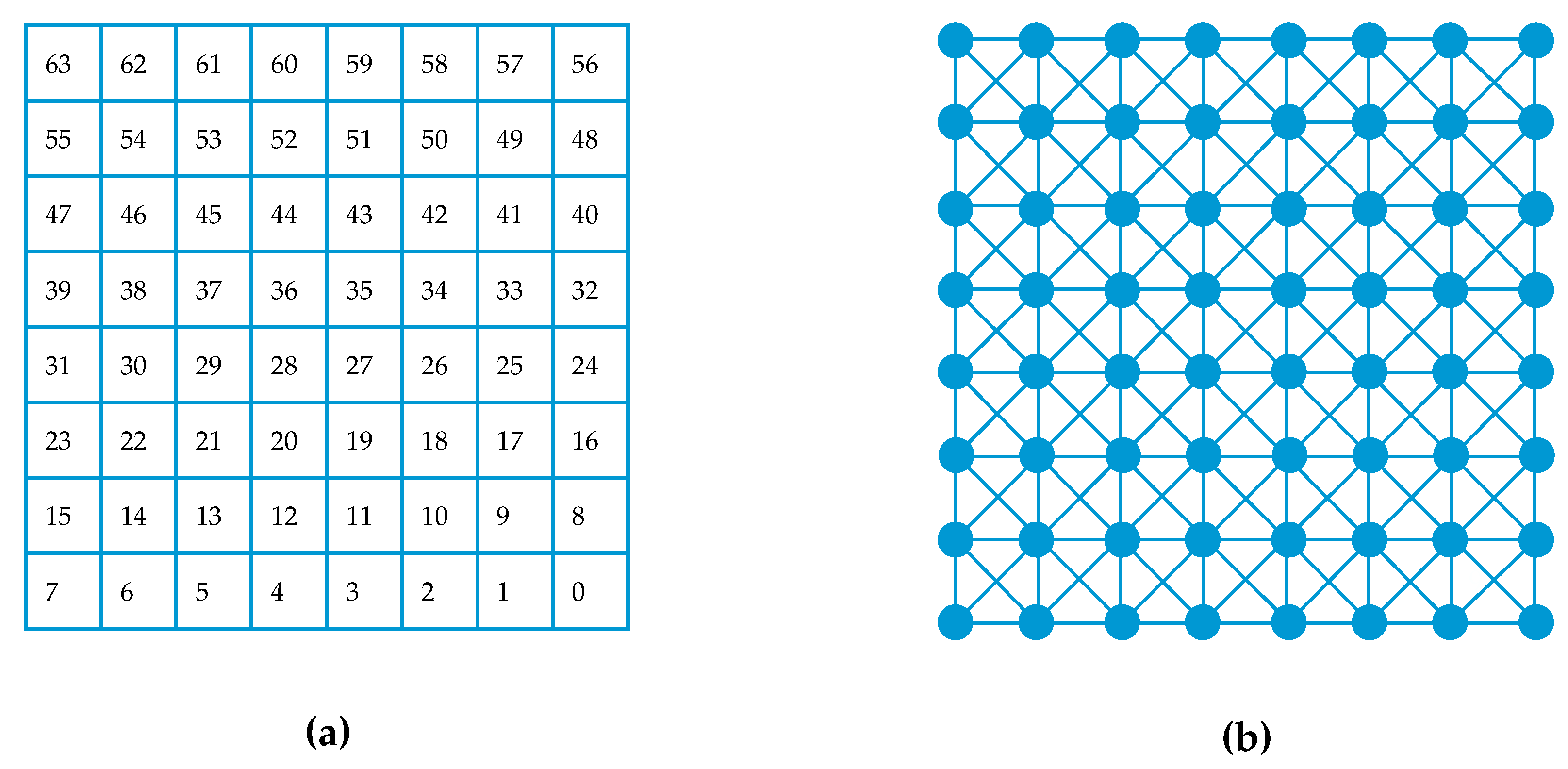
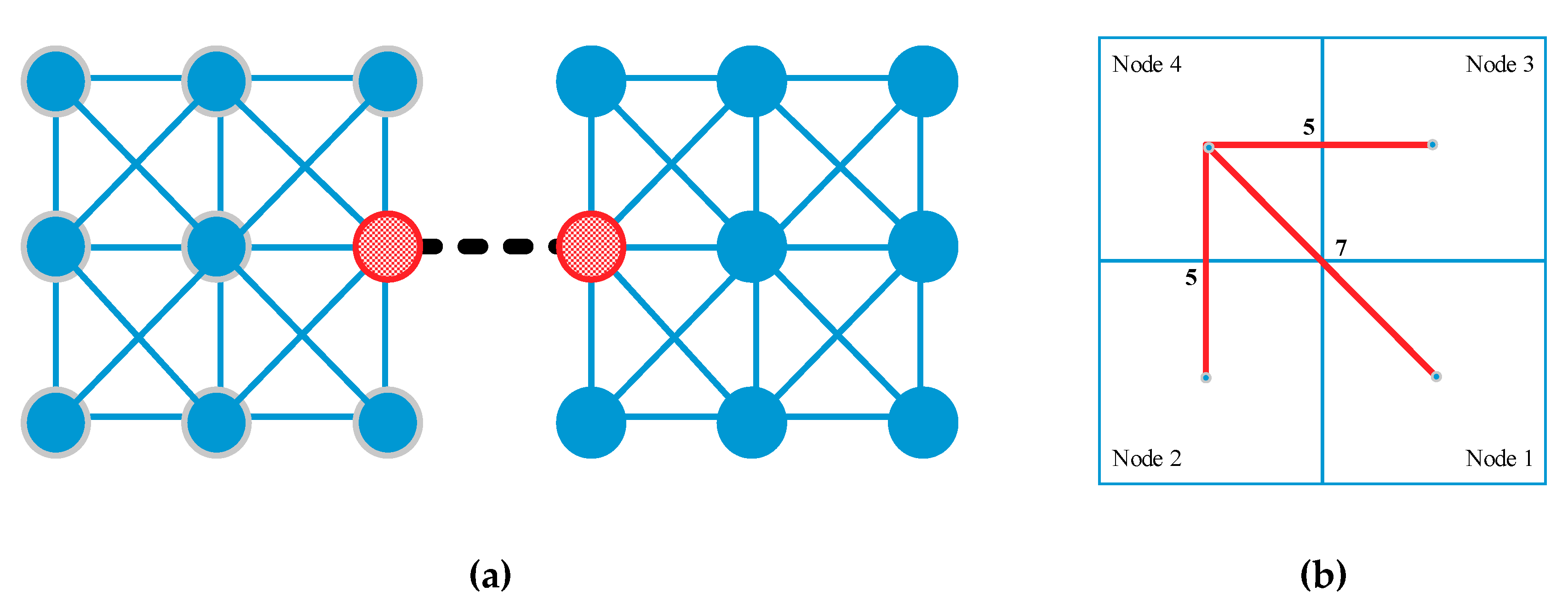
2.1. Environment Model
2.2. Agent Model
2.3. Behavioral Model
2.3.1. Dynamic Memory Management
2.3.2. Evasion Mechanisms
- To detect the conflict, the agent first searches adjacent nodes in order of increasing heuristic value to find an unoccupied tile.
- If there is an unoccupied slot, it sets the slot as its temporary target. With this move, the conflict condition no longer exists and can be considered as solved.
- If the first agent cannot find an unoccupied slot, this means it is surrounded. In this case, the agent raises a crowd flag and the other agent starts the same scan.
- If the second agent finds an unoccupied slot, it sets the slot as its new target. If not, both agents are surrounded and they have to wait until there is an opening or the next action in the plan is triggered.
2.3.3. Behavioral Hierarchy Plan
2.4. Testing the Model
- To observe the effect of the sidestepping mechanism, there should be empty nodes around the agents to lead to the area in which they conflict.
- The reconsideration mechanism evaluates alternative routes in case of congestion. When multiple agents are placed in a room with a single door, congestion will naturally occur at the door. In this case, the effects of this mechanism cannot be observed since agents cannot find an alternative exit by running the reconsideration procedure.
- The spatial information in their memory is usually almost the same when all agents start in nearby locations. In this case, the impact of the information exchange mechanism tends to decrease.
3. Results and Discussion
3.1. Effect of Spatial Knowledge
3.2. Calibration of Reconsideration Mechanism
3.3. Test Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm:Pseudo-code for A* Pathfinding |
| openList: stores pending unevaluated nodes in form of a list |
| closedList: stores visited nodes |
| w: weight function; consists of weights of connecting edges |
| g: cost function of the node from the start |
| h: heuristic function |
| currentNode = node_start |
| g(node_start) = 0; f(node_start)=h(node_start) |
| openList.Add(node_start) |
| While(openList is not empty) |
| If(currentNode = goal) break; |
| For each agent in currentNode.agent |
| If agent is not in (openList or closedList) |
| openList.add(agent) |
| agent.Predecessor = currentNode; |
| if(g(agent) > g(Predecessor) + w(Predecessor,agent)) |
| g(agent) = g(Predecessor) + w(Predecessor,agent) |
| For each node n in openList |
| Select n with min(g(n) + h(n)) |
| closedList.Add(currentNode); |
| openList.Delete(currentNode); |
| currentNode = n; |
| Algorithm:Pseudo-code for triggering reconsideration procedure | |
| If path is blocked | |
| wait = true; | |
| While (wait) | |
| If path is blocked | |
| time_waited++; | |
| Else time_waited = 0 and wait = false | |
| If time_waited ≥ time_to_wait | |
| Reconsideration(); | |
| End While | |
| Algorithm:Pseudo-code for crowd-coefficient calculation | |
| for each adjacent node n | |
| if (n is occupied) | |
| seed++ | |
| for(i = current_step to path_length) | |
| if (path[i + 1] is occupied) | |
| coefficient + = seed | |
References
- Cimler, R.; Doležal, O.; Kühnová, J.; Pavlík, J. Herding Algorithm in a Large Scale Multi-agent Simulation. In Smart Innovation, System and Technologies; Jezic, G., Chen-Burger, Y.H., Howlett, R., Jain, L., Eds.; Springer: Cham, Switzerland, 2016; Volume 58, pp. 83–94. [Google Scholar]
- Amigoni, F.; Castelletti, A.; Gazzotti, P.; Giuliani, M.; Mason, E. Water Resources Systems Operations via Multiagent Negotiation: (Extended Abstract), AAMAS ’16. In Proceedings of the 2016 International Conference on Autonomous Agents & Multiagent Systems, Singapore, 9–13 May 2016; pp. 1379–1380. [Google Scholar]
- Xuan, P.; Lesser, V.; Zilberstein, S. Communication Decisions in Multi-agent Cooperation: Model and Experiments AGENTS’01. In Proceedings of the fifth international conference on Autonomous agents, Montreal, QC, Canada, 28 May–1 June 2001; pp. 616–623. [Google Scholar]
- Greco, A.; Pluchino, A.; Barbarossa, L.; Barreca, G.; Caliò, I.; Martinico, F.; Rapisarda, A. A New Agent-Based Methodology for the Seismic Vulnerability Assessment of Urban Areas. ISPRS Int. J. Geo-Inf. 2019, 8, 274. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Zhang, L.; Li, C.; Chen, M.Z.Q. Observer-Based Consensus Tracking of Nonlinear Agents in Hybrid Varying Directed Topology. IEEE Trans. Cybern. 2017, 47, 2212–2222. [Google Scholar] [CrossRef] [PubMed]
- Su, H.; Ye, Y.; Qiu, Y.; Cao, Y.; Chen, M.Z.Q. Semi-Global Output Consensus for Discrete-Time Switching Networked Systems Subject to Input Saturation and External Disturbances. IEEE Trans. Cybern. 2019, 49, 3934–3945. [Google Scholar] [CrossRef] [PubMed]
- Mendoza-Silva, G.M.; Gould, M.; Montoliu, R.; Torres-Sospedra, J.; Huerta, J. An Occupancy Simulator for a Smart Parking System: Developmental Design and Experimental Considerations. ISPRS Int. J. Geo-Inf. 2019, 8, 212. [Google Scholar] [CrossRef] [Green Version]
- Eivazy, H.; Malek, M.R. Flood Management in Aqala through an Agent-Based Solution and Crowdsourcing Services in an Enterprise Geospatial Information System. ISPRS Int. J. Geo-Inf. 2019, 8, 420. [Google Scholar] [CrossRef] [Green Version]
- Pan, X.; Han, C.; Dauber, K.; law, K. A Multi-agent Based Framework for the Simulation of Human and Social Behaviors during Emergency Evacuations. Ai Soc. 2007, 22, 113–132. [Google Scholar] [CrossRef]
- Almeida, J.; Rosetti, R.; Coelho, A. Crowd Simulation Modeling Applied to Emergency and Evacuation Simulations using Multi-Agent Systems. arXiv 2013, arXiv:1303.4692. [Google Scholar]
- Zhao, Y.; Lu, T.; Fu, L.; Wu, P.; Li, M. Experimental verification of escape efficiency enhancement by the presence of obstacles. Saf. Sci. 2020, 122, 104517. [Google Scholar] [CrossRef]
- Kodur, V.K.R.; Venkatachari, S.; Naser, M.Z. Egress Parameters Influencing Emergency Evacuation in High-Rise Buildings. Fire Technol. 2020, 2, 715–735. [Google Scholar] [CrossRef]
- Wang, J.P.; Wang, M.R.; Zhou, J.L.; Zuo, Q.J.; Shi, X.X. Simulation based optimal evacuation plan in vertical ship lift: A case study. Eng. Comput. 2019. [Google Scholar] [CrossRef]
- Chu, H.; Yu, J.; Wen, J.; Yi, M.; Chen, Y. Emergency Evacuation Simulation and Management Optimization in Urban Residential Communities. Sustainability 2019, 11, 795. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Li, Q.; Claramunt, C. A time-extended network model for staged evacuation planning. Saf. Sci. 2018, 108, 225–236. [Google Scholar] [CrossRef]
- Han, L.; Guo, H.; Zhang, H.; Kong, Q.; Zhang, A.; Gong, C. An Efficient Staged Evacuation Planning Algorithm Applied to Multi-Exit Buildings. ISPRS Int. J. Geo-Inf. 2020, 9, 46. [Google Scholar] [CrossRef] [Green Version]
- Balakhontceva, M.; Karbovski, V. Multi-agent Simulation of Passenger Evacuation Considering Ship Motions. Procedia Comput. Sci. 2015, 66, 140–149. [Google Scholar] [CrossRef] [Green Version]
- Ai-chun, C.; Xiao-ting, Y.; Xu-dong, H. Stadium Evacuation based on Multi-agent System. J. Multimed. 2014, 9, 902–909. [Google Scholar]
- Bicharra, A.C.; Sanchez-Pi, N.; Correiab, L.; Molinac, J.M. Multi-agent Simulations for Emergency Situations in an airport scenario. Adv. Distrib. Comput. Artif. Intell. J. 2012, 3, 69–77. [Google Scholar]
- Chow, W.K.; Candy, M.Y. Waiting time in emergency evacuation of crowded public transport terminals. Saf. Sci. 2008, 46, 844–857. [Google Scholar] [CrossRef]
- Yang, W.; Hu, Y.; Hu, C.; Yang, M. An Agent-Based Simulation of Deep Foundation Pit Emergency Evacuation Modeling in the Presence of Collapse Disaster. Symmetry 2018, 10, 581. [Google Scholar] [CrossRef] [Green Version]
- Niyomubyeyi, O.; Sicuaio, T.E.; Díaz González, J.I.; Pilesjö, P.; Mansourian, A. A Comparative Study of Four Metaheuristic Algorithms, AMOSA, MOABC, MSPSO, and NSGA-II for Evacuation Planning. Algorithms 2020, 13, 16. [Google Scholar] [CrossRef] [Green Version]
- Musharraf, M.; Smith, J.; Khan, F.; Veitch, B. Identifying route selection strategies in offshore emergency situations using decision trees. Reliab. Eng. Syst. Saf. 2018, 194, 106179. [Google Scholar] [CrossRef]
- Golas, A.; Narain, R.; Curtis, S.; Lin, M.C. Hybrid Long-Range Collision Avoidance for Crowd Simulation. IEEE Trans. Vis. Comput. Graph. 2014, 20, 1022–1034. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Berg, J.V.D.; Patil, S.; Sewall, J.; Manocha, D.; Lin, M. Interactive Navigation of Multiple Agents in Crowded Environments. In Proceedings of the Interactive 3D graphics and games, Redwood Shores, CA, USA, 15–17 February 2008; pp. 139–147. [Google Scholar]
- Foudil, C.; Noureddine, D.; Sanza, C.; Duthen, Y. Path Finding and Collision Avoidance in Crowd Simulation. J. Comput. Inf. Technol. 2009, 17, 217–228. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; Liu, L.; Yu, Y.; Peng, Z.; Jiao, H.; Niu, Q. An Agent-based Model Simulation of Human Mobility Based on Mobile Phone Data: How Commuting Relates to Congestion. ISPRS Int. J. Geo-Inf. 2019, 8, 313. [Google Scholar] [CrossRef] [Green Version]
- Sycara, K. Resolving Goal Conflicts Via Negotiation. In Proceedings of the The Seventh National Conference On Artificial Intelligence (AAAI’88), Saint Paul, MN, USA, 21–26 August 1988; pp. 245–250. [Google Scholar]
- Witkowski, O.; Ikegami, T. Emergence of Swarming Behavior: Foraging Agents Evolve Collective Motion Based on Signaling. PLoS ONE 2016, 11, e0152756. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, H.; Winter, S.; Tomko, M. Integrating Decentralized Indoor Evacuation with Information Depositories in the Field. ISPRS Int. J. Geo-Inf. 2017, 6, 213. [Google Scholar] [CrossRef] [Green Version]
- Choi, M.; Lee, S.; Hwang, S.; Park, M.; Lee, H.-S. Comparison of Emergency Response Abilities and Evacuation Performance Involving Vulnerable Occupants in Building Fire Situations. Sustainability 2020, 12, 87. [Google Scholar] [CrossRef] [Green Version]
- Dosey, M.A.; Meisels, M. Personal space and self-protection. J. Personal. Soc. Psychol. 1969, 11, 93–97. [Google Scholar] [CrossRef]
- Sommer, R. Personal Space: The Behavioral Basis of Design; Prentice-Hall: Englewood Cliffs, NJ, USA, 1969. [Google Scholar]
- Santos, G.; Aguirre, B. A Critical Review of Emergency Evacuation Simulation Models. In Proceedings of the Building Occupant Movement during Fire Emergencies, Gaithersburg, MD, USA, 10–11 June 2004. [Google Scholar]
- Amaoka, T.; Laga, H.; Nakajima, M. Modeling the Personal Space of Virtual Agents for Behavior Simulation. In Proceedings of the International Conference on CyberWorlds, Bradford, UK, 7–11 September 2009; Ugail, H., Qahwaji, R.S.R., Earnshaw, R.A., Willis, P.J., Eds.; IEEE CPS: Los Alamitos, CA, USA; pp. 364–370. [Google Scholar]
- Mas, E.; Suppasri, A.; Koshimura, S.; Imamura, F. Agent based simulation of the 2011 Great East Japan Earthquake Tsunami evacuation procedure. Introduction to an integrated model of tsunami inundation and evacuation. J. Nat. Disaster Sci. 2012, 34, 41–57. [Google Scholar] [CrossRef] [Green Version]
- Song, Y.; Niu, L.; Li, Y. Individual Behavior Simulation Based on Grid Object and Agent Model. ISPRS Int. J. Geo-Inf. 2019, 8, 388. [Google Scholar] [CrossRef] [Green Version]
- Kuligowski, E.D.; Peacock 2, R.D. A review of Building Evacuation Models, 2nd ed.; U.S. Government Printing Office: Washington, DC, USA, 2010; pp. 12–22.
- Zou, Y.; Zou, S.; Niu, C. The Optimization of Emergency Evacuation from Nuclear Accidents in China. Sustainability 2018, 10, 2737. [Google Scholar] [CrossRef] [Green Version]
- Desmet, A.; Gelenbe, E. Graph and Analytical Models for Emergency Evacuation. Future Internet 2013, 5, 46–55. [Google Scholar] [CrossRef] [Green Version]
- Tan, L.; Lin, H.; Hu, M.; Che, W. Agent-based simulation of building evacuation using a grid graph-based model. Earth Environ. Sci. 2014, 18, 012123. [Google Scholar] [CrossRef] [Green Version]
- Bülbül, E.; Amrahov, Ş. Simulation and Adaptation of Pathfinding Algorithms under Realistic Physical Conditions in 3D Environments. In Proceedings of the 14. Industrial Simulation Conference (ISC’2016), Bucharest, Romania, 6–8 June 2016; pp. 19–25. [Google Scholar]
- Bülbül, E.; Cetin, A. Optimization of Grid-Graphs using Segmentation. In Proceedings of the International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 16–17 September 2017; pp. 1–6. [Google Scholar]
- Pires, V.; Arroz, M.; Custódio, L. Logic Based Hybrid Decision System for a Multirobot Team. In Proceedings of the 8th Conference on Intelligent Autonomous Systems, Amsterdam, The Netherlands, 10–13 March 2004. [Google Scholar]
- Al-Yaseen, W.; Othman, Z.; Nazri, M. Real-time multi-agent system for an adaptive intrusion detection system. Pattern Recognit. Lett. 2017, 85, 56–64. [Google Scholar] [CrossRef]
- Abbass, H.A.; Scholz, J.; Reid, D.R. Foundations of Trusted Autonomy (Studies in Systems, Decision and Control), 1st ed.; Springer: Basel, Switzerland, 2018. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]









| No. of Agents with Spatial Knowledge | No. of Agents Evacuated (case 1/case 2) | Evacuation of All Agents (case 1/case 2) | Avg. Escape Time (s) (case 1/case 2) |
|---|---|---|---|
| 0 | 2/7 | Fail/Fail | -/- |
| 1 | 2/8 | Fail/Fail | -/- |
| 2 | 2/9 | Fail/Fail | -/- |
| 3 | 3/9 | Fail/Fail | -/- |
| 4 | 3/12 | Fail/Fail | -/- |
| 5 | 4/12 | Fail/Fail | -/- |
| 6 | 5/12 | Fail/Fail | -/- |
| 7 | 6/13 | Fail/Fail | -/- |
| 8 | 6/13 | Fail/Fail | -/- |
| 9 | 7/13 | Fail/Fail | -/- |
| 10 | 7/13 | Fail/Fail | -/- |
| 11 | 8/16 | Fail/Succeed | -/32.99 |
| 12 | 8/16 | Fail/Succeed | -/33.02 |
| 13 | 9/16 | Fail/Succeed | -/30.24 |
| 14 | 11/16 | Fail/Succeed | -/30.24 |
| 15 | 16/16 | Succeed/Succeed | 38.07/30.24 |
| 16 | 16/16 | Succeed/Succeed | 35.39/28.50 |
| Time-to-Wait (s) | Crowd-Threshold | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| Case 1 | Case 2 | Case 1 | Case 2 | Case 1 | Case 2 | |
| 0 | 43.86 | 38.49 | 45.45 | 37.46 | 43.36 | 35.68 |
| 0.2 | 42.20 | 38.82 | 47.22 | 43.62 | 42.65 | 39.12 |
| 0.4 | 46.85 | 36.37 | 43.25 | 33.57 | 44.40 | 38.03 |
| 0.6 | 43.33 | 37.73 | 49.75 | 35.85 | 46.16 | 36.47 |
| 0.8 | 50.84 | 38.11 | 50.25 | 35.41 | 46.82 | 38.71 |
| 1 | 46.65 | 37.15 | 44.45 | 37.45 | 48.55 | 38.95 |
| 1.2 | 50.77 | 38.72 | 51.10 | 39.23 | 49.37 | 40.17 |
| 1.4 | 50.43 | 38.53 | 49.95 | 40.83 | 50.20 | 41.03 |
| 1.6 | 50.69 | 42.01 | 50.49 | 40.71 | 50.58 | 42.01 |
| 1.8 | 56.12 | 40.37 | 53.94 | 40.79 | 54.90 | 41.03 |
| 2 | 59.61 | 42.11 | 61.09 | 42.25 | 58.67 | 42.61 |
| 2.2 | 64.91 | 44.42 | 60.79 | 44.43 | 57.04 | 45.02 |
| 2.4 | 67.00 | 45.62 | 64.40 | 44.49 | 55.43 | 46.02 |
| 2.6 | 67.34 | 46.81 | 71.21 | 43.07 | 55.45 | 46.91 |
| 2.8 | 71.63 | 48.03 | 63.52 | 48.04 | 55.53 | 48.70 |
| 3 | 74.08 | 50.76 | 73.61 | 50.65 | 55.57 | 51.76 |
| Time-to- Wait (s) | Crowd-Threshold | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 1 | 2 | 3 | |
| Spatial Knowledge True | Spatial Knowledge False | |||||
| 0 | 3685 | 3396 | 1172 | 2425 | 2058 | 1165 |
| 0.2 | 475 | 451 | 153 | 452 | 417 | 242 |
| 0.4 | 222 | 214 | 76 | 252 | 224 | 146 |
| 0.6 | 132 | 124 | 46 | 167 | 139 | 96 |
| 0.8 | 87 | 85 | 32 | 146 | 145 | 95 |
| 1 | 72 | 65 | 24 | 107 | 106 | 71 |
| 1.2 | 45 | 42 | 15 | 88 | 85 | 70 |
| 1.4 | 33 | 29 | 10 | 75 | 73 | 70 |
| 1.6 | 25 | 24 | 8 | 73 | 66 | 36 |
| 1.8 | 19 | 18 | 8 | 47 | 46 | 36 |
| 2 | 17 | 15 | 7 | 46 | 41 | 30 |
| 2.2 | 14 | 12 | 7 | 35 | 33 | 29 |
| 2.4 | 8 | 8 | 4 | 33 | 32 | 20 |
| 2.6 | 7 | 7 | 2 | 33 | 31 | 15 |
| 2.8 | 5 | 4 | 2 | 19 | 16 | 14 |
| 3 | 4 | 4 | 2 | 12 | 10 | 6 |
| Test No. | Behavior Plan | Spatial Knowledge | S | I | R | Escape Ratio | Avg. Escape Time (s) | ||
|---|---|---|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 1 | Case 2 | ||||||
| 0 | - | T | F | F | F | 1 | 1 | 35.39 | 28.50 |
| 1 | - | F | F | F | F | 0.125 | 0.5 | Fail | Fail |
| 2 | - | F | F | F | T | 1 | 1 | 42.20 | 33.57 |
| 3 | - | F | F | T | F | 0.125 | 0.5 | Fail | Unstable |
| 4 | - | F | T | F | F | 1 | 1 | 52.65 | 40.01 |
| 5 | I-S-R | F | F | T | T | 1 | 1 | 41.55 | 34.42 |
| 6 | I-S-R | F | T | F | T | 1 | 1 | 45.49 | 39.32 |
| 7 | I-S-R | F | T | T | F | 1 | 1 | 46.17 | 30.75 |
| 8 | I-S-R | F | T | T | T | 1 | 1 | 43.71 | 35.09 |
| 9 | S-I-R | F | F | T | T | 1 | 1 | 41.55 | 34.42 |
| 10 | S-I-R | F | T | F | T | 1 | 1 | 45.49 | 39.32 |
| 11 | S-I-R | F | T | T | F | 1 | 1 | 48.97 | 32.45 |
| 12 | S-I-R | F | T | T | T | 1 | 1 | 41.57 | 36.59 |
| 13 | R-S-I | F | F | T | T | 1 | 1 | 43.03 | 35.11 |
| 14 | R-S-I | F | T | F | T | 1 | 1 | 43.98 | 34.57 |
| 15 | R-S-I | F | T | T | F | 1 | 1 | 48.97 | 32.45 |
| 16 | R-S-I | F | T | T | T | 1 | 1 | 43.14 | 35.49 |
| 17 | R-I-S | F | F | T | T | 1 | 1 | 43.03 | 35.11 |
| 18 | R-I-S | F | T | F | T | 1 | 1 | 43.98 | 34.57 |
| 19 | R-I-S | F | T | T | F | 1 | 1 | 46.17 | 30.75 |
| 20 | R-I-S | F | T | T | T | 1 | 1 | 42.22 | 35.22 |
| 21 | I-R-S | F | F | T | T | 1 | 1 | 41.55 | 34.42 |
| 22 | I-R-S | F | T | F | T | 1 | 1 | 43.98 | 34.57 |
| 23 | I-R-S | F | T | T | F | 1 | 1 | 46.17 | 30.75 |
| 24 | I-R-S | F | T | T | T | 1 | 1 | 41.48 | 34.78 |
| 25 | S-R-I | F | F | T | T | 1 | 1 | 43.03 | 35.11 |
| 26 | S-R-I | F | T | F | T | 1 | 1 | 45.49 | 39.32 |
| 27 | S-R-I | F | T | T | F | 1 | 1 | 48.97 | 32.45 |
| 28 | S-R-I | F | T | T | T | 1 | 1 | 44.91 | 36.1 |
| Hierarchy Plan | Tests | Avg. Escape Time (s) | |
|---|---|---|---|
| Case 1 | Case 2 | ||
| I-R | 5, 9, 21 | 41.55 | 34.42 |
| R-I | 13, 17, 25 | 43.03 | 35.11 |
| R-S | 14, 18, 22 | 43.98 | 34.57 |
| S-R | 6, 10, 26 | 45.49 | 39.32 |
| I-S | 7, 19, 23 | 46.17 | 30.75 |
| S-I | 11, 15, 27 | 48.97 | 36.59 |
| I-R-S | 24 | 41.48 | 34.78 |
| S-I-R | 12 | 41.57 | 36.59 |
| R-I-S | 20 | 42.22 | 35.22 |
| R-S-I | 16 | 43.14 | 35.49 |
| I-S-R | 8 | 43.71 | 35.09 |
| S-R-I | 28 | 44.91 | 36.10 |
| Model | Simulated Environment | Spatial Knowledge/Situational Awareness | Improvement (%) |
|---|---|---|---|
| Obstacle control [11] | Single room | Yes | 10.4 |
| Parametric [12] | High-rise building | Yes | 24 |
| GAM [13] | Vertical ship lift | Yes | 28.5 |
| Management Optimization [14] | Building | Yes | 25,2 |
| Roads | Yes | 12 | |
| Planned evacuation [15] | Santai County (China) | Yes | 31 |
| PSEP [16] | Multi-exit building | Yes | 30 |
| HBP | Office environment (multi-exit) | Yes | 32.78 |
| No | 23.14 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cetin, A.; Bulbul, E. Hierarchical Behavior Model for Multi-Agent System with Evasion Capabilities and Dynamic Memory. ISPRS Int. J. Geo-Inf. 2020, 9, 279. https://doi.org/10.3390/ijgi9040279
Cetin A, Bulbul E. Hierarchical Behavior Model for Multi-Agent System with Evasion Capabilities and Dynamic Memory. ISPRS International Journal of Geo-Information. 2020; 9(4):279. https://doi.org/10.3390/ijgi9040279
Chicago/Turabian StyleCetin, Aydin, and Erhan Bulbul. 2020. "Hierarchical Behavior Model for Multi-Agent System with Evasion Capabilities and Dynamic Memory" ISPRS International Journal of Geo-Information 9, no. 4: 279. https://doi.org/10.3390/ijgi9040279
APA StyleCetin, A., & Bulbul, E. (2020). Hierarchical Behavior Model for Multi-Agent System with Evasion Capabilities and Dynamic Memory. ISPRS International Journal of Geo-Information, 9(4), 279. https://doi.org/10.3390/ijgi9040279