Swarm-based Parallel Control of Adjacent Irregular Buildings Considering Soil–structure Interaction


Abstract
:1. Introduction
2. Analytical Equations of Motion Considering Soil–structure Interaction
3. Swarm-Based Parallel Control (SPC)
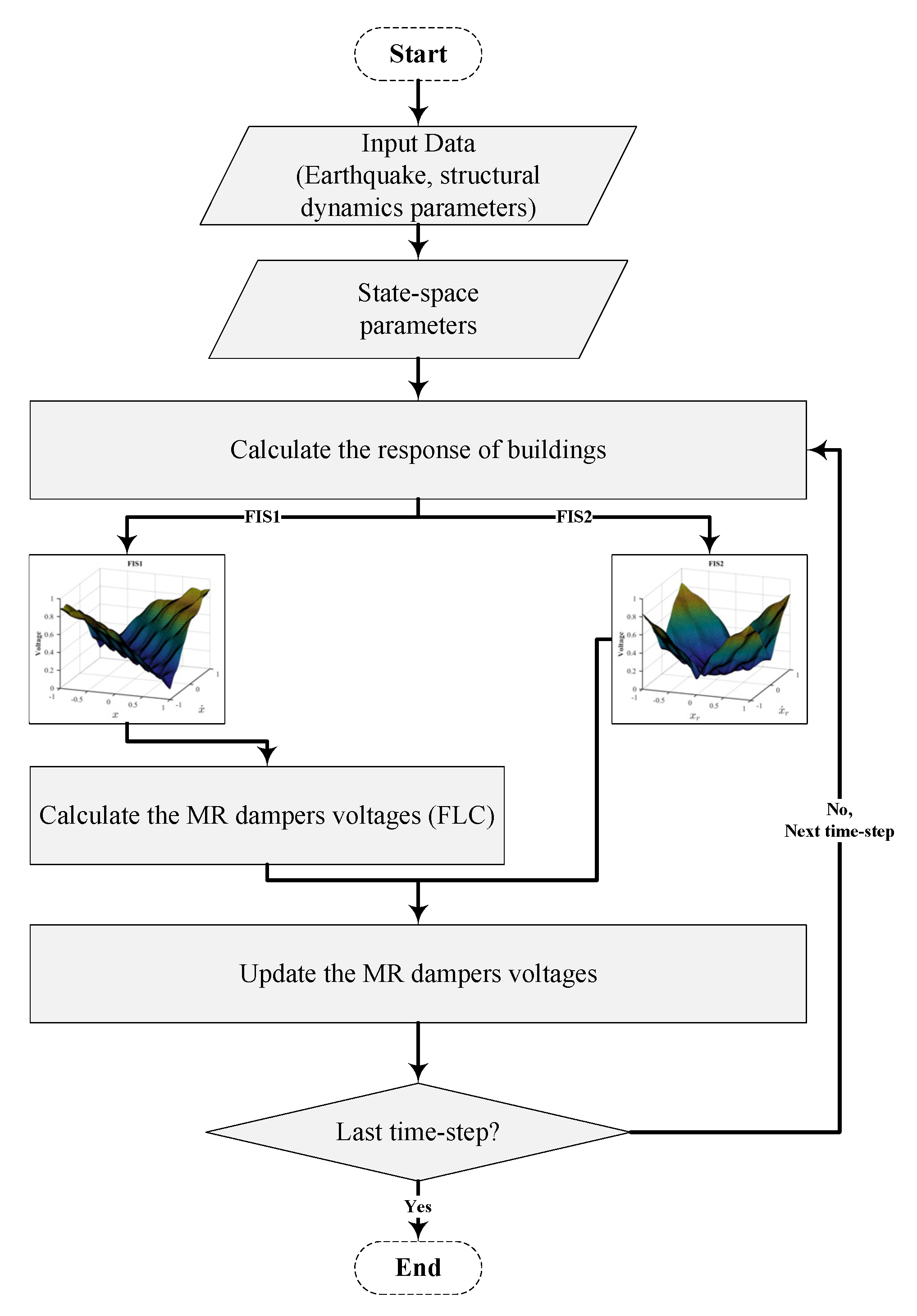
- Step 1.
- Estimating the dynamic properties of the soil as well as the building (e.g., using data-driven-based machine learning models [38]).
- Step 2.
- Assembling the state-space model and equation of motions according to Equations (1)–(12).
- Step 3.
- Calculating the response of each of the adjacent buildings, }, by solving the state-space equations in Step 3.
- Step 4.
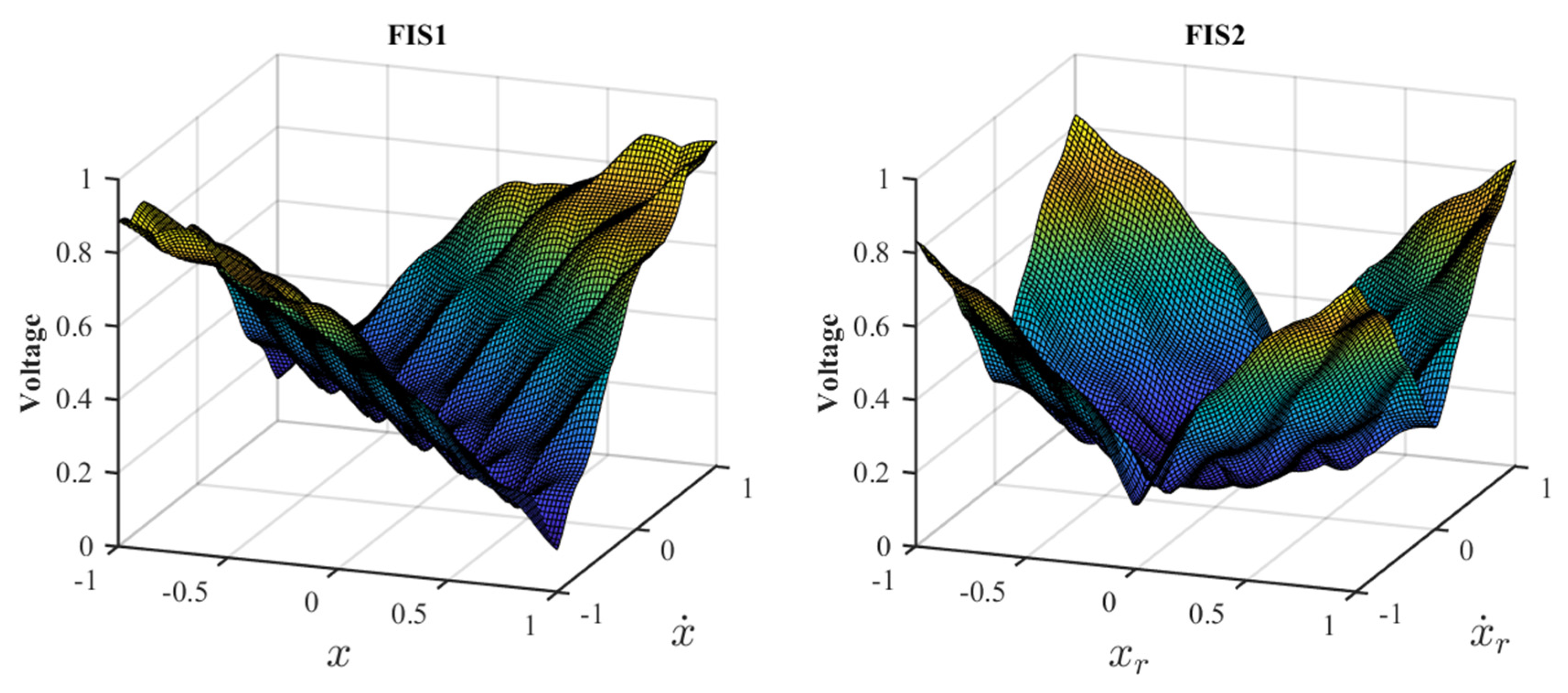
- Normalizing the state vector (i.e., measures responses, and calculating the control force using the fuzzy logic control FIS1.
- Step 5.
- Updating the calculated control force in both directions, using the second fuzzy logic-based updating rules, FIS2, based on the relative displacements of two adjacent buildings. In this step, the outputs of FIS1 and FIS2 are compared, and if the FIS2 output is higher than the FIS1 output, the control force is adjusted based on the FIS2 results.
- Step 6.
- Apply the calculated control force, , and continuing until the end of the last time-step.
4. Numerical Studies
4.1. Building Models Discerptions
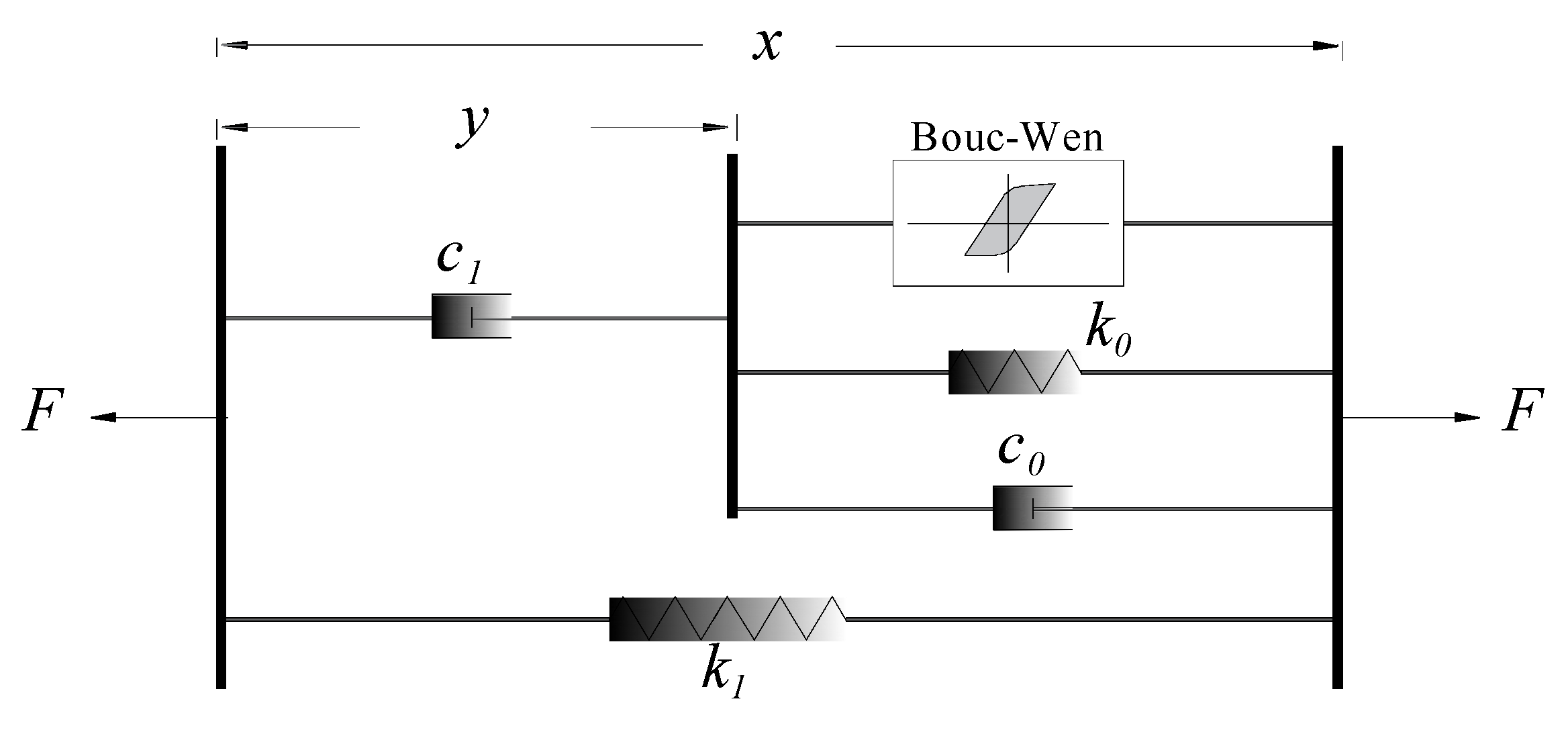
4.2. Magneto-Rheological (MR) Damper
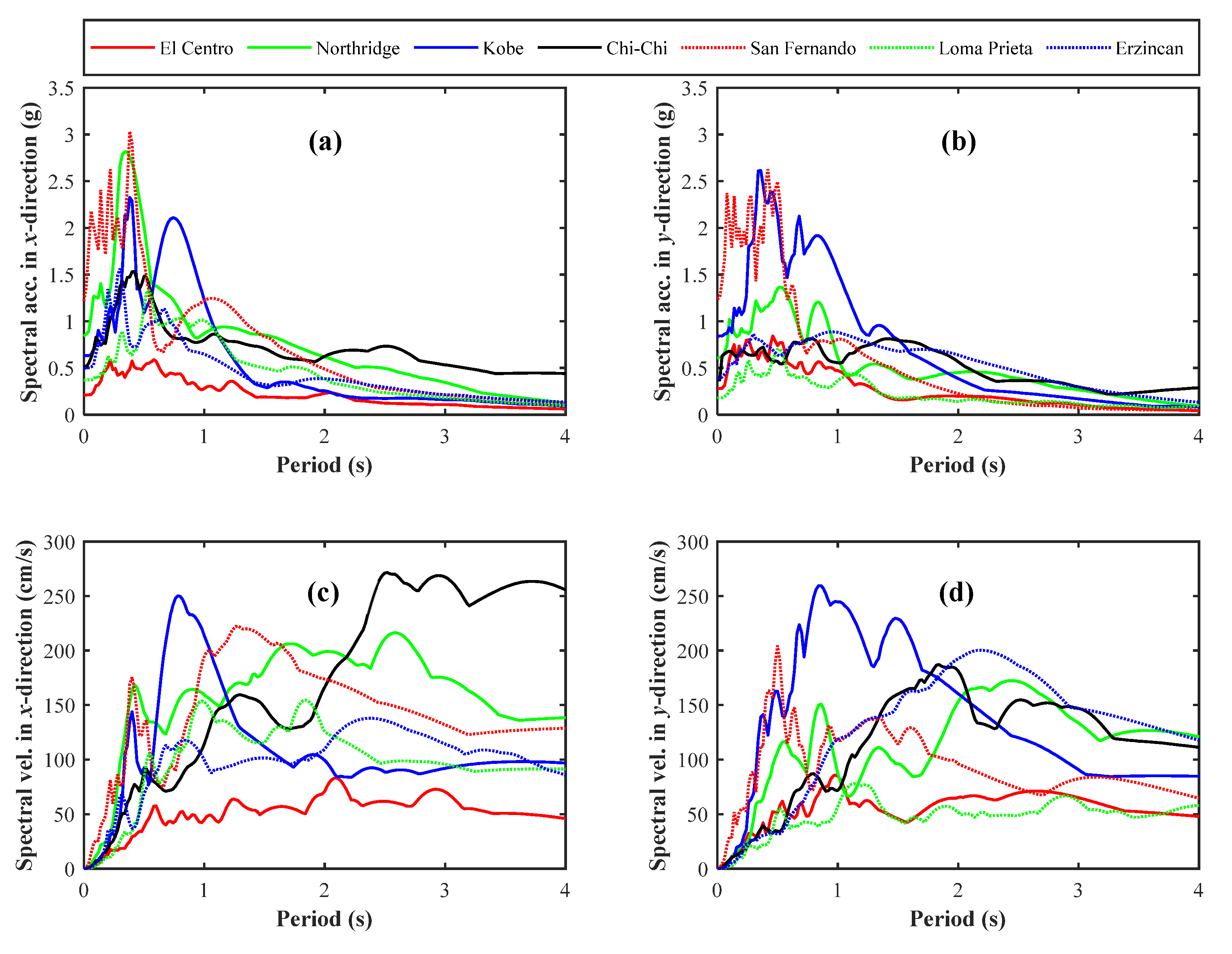
4.3. Earthquake Loads
5. Results and Discussion
5.1. Control of Single Building Considering Soil–structure Interaction (Case I)
5.1.1. Peak Responses
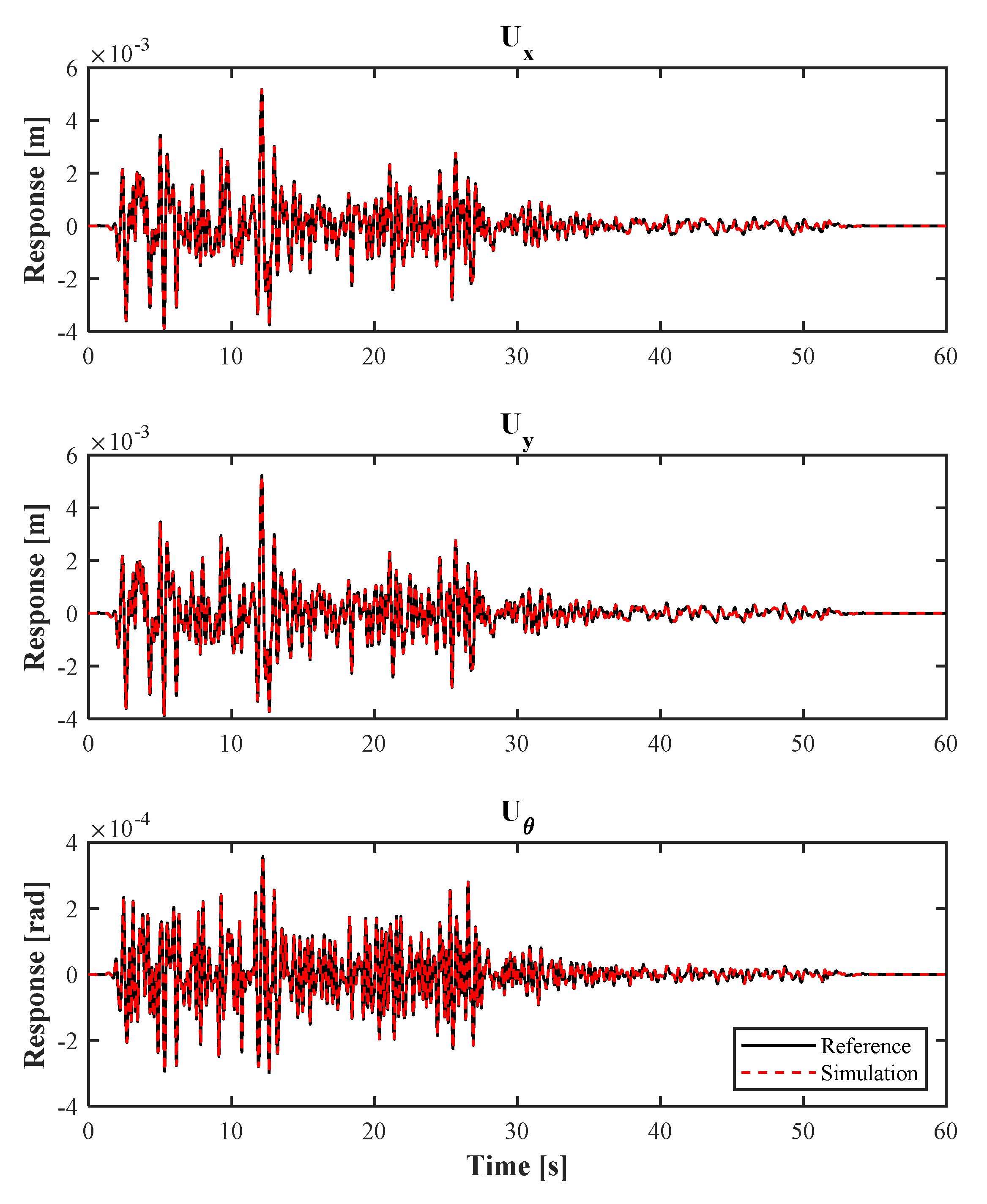
5.1.2. Time-History Responses
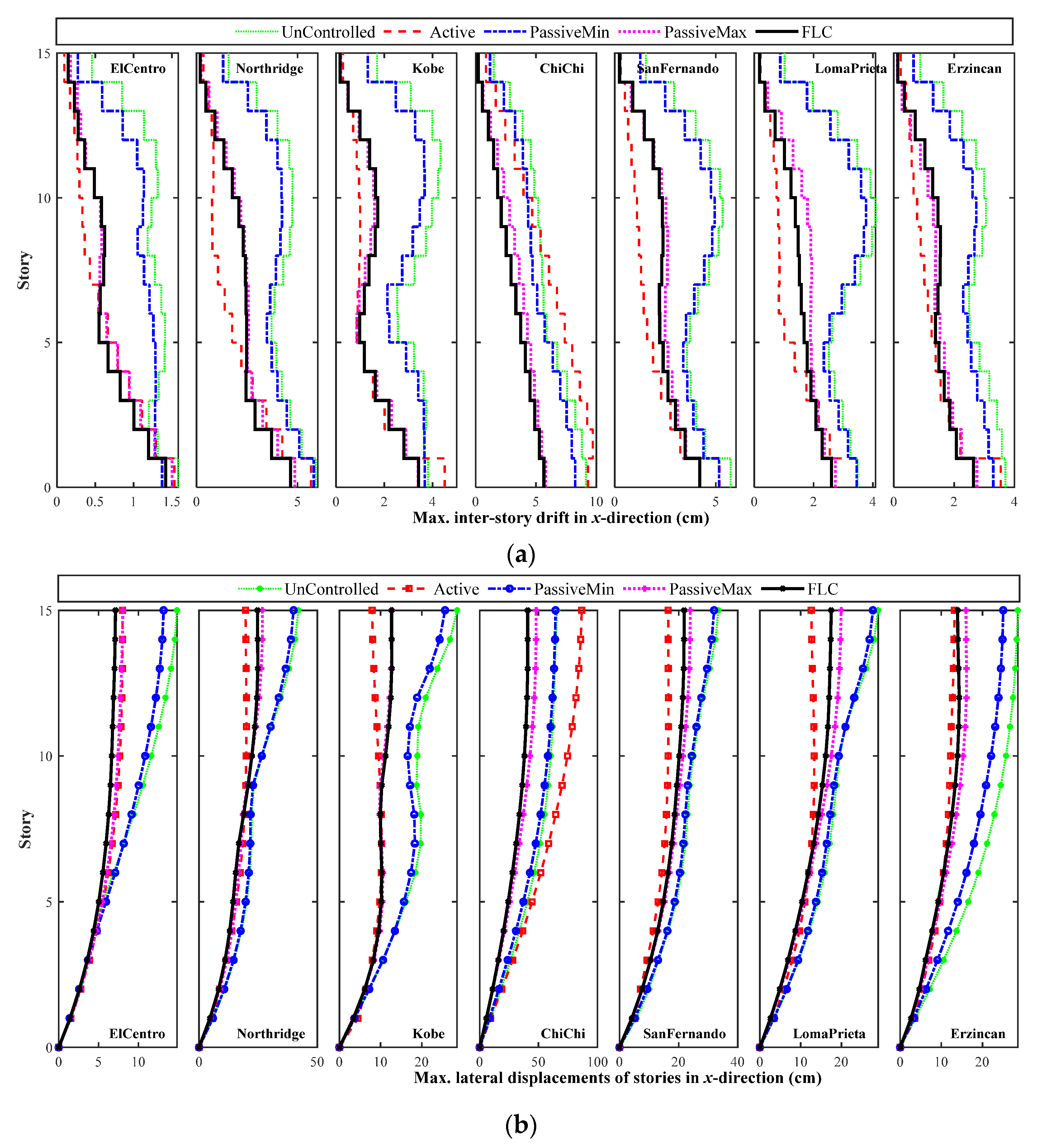
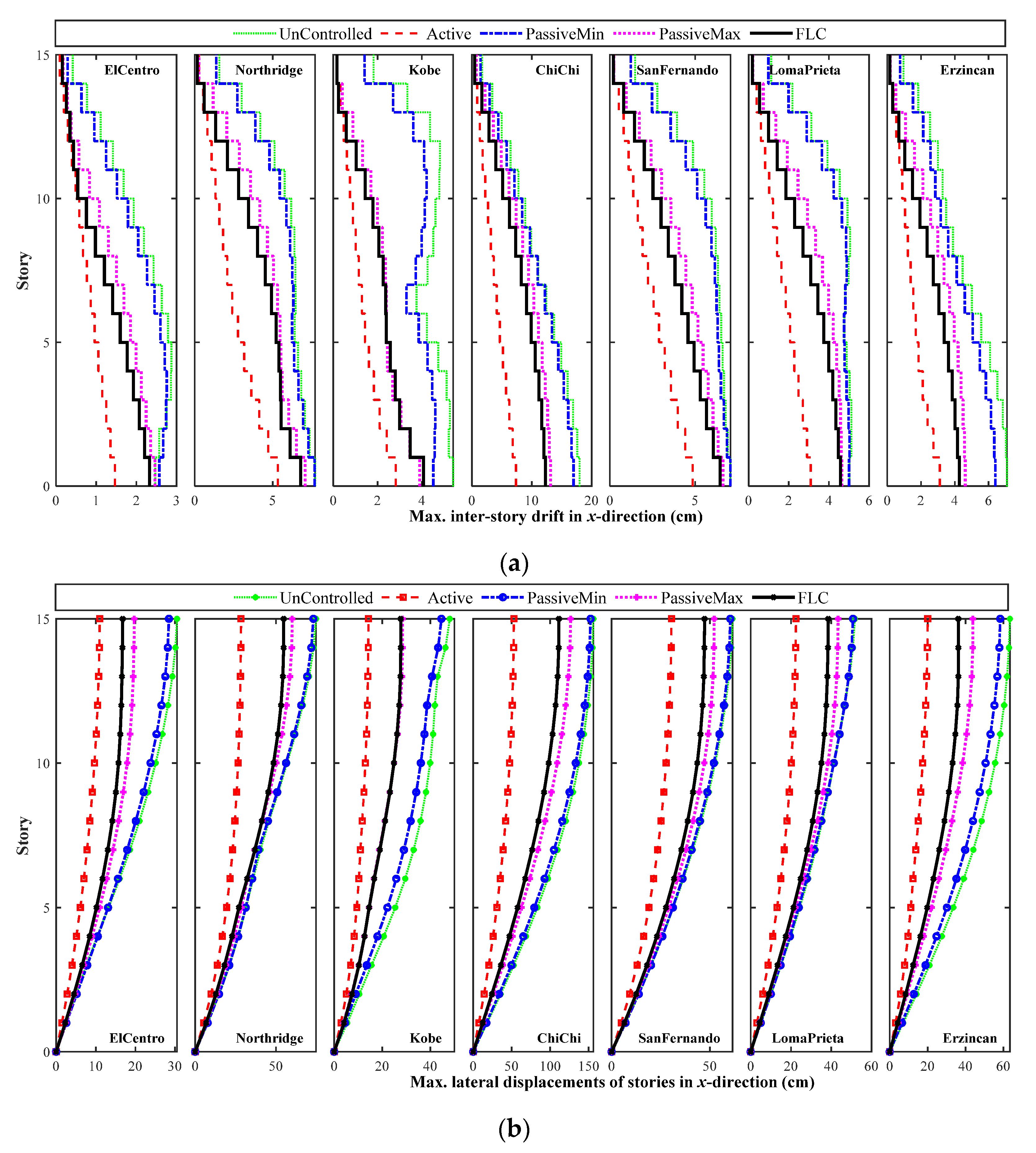
5.1.3. Inter-Story Drift and Lateral Displacement Profiles
5.2. Advantages of WSNs in Case of Structural Damage or Control Failure
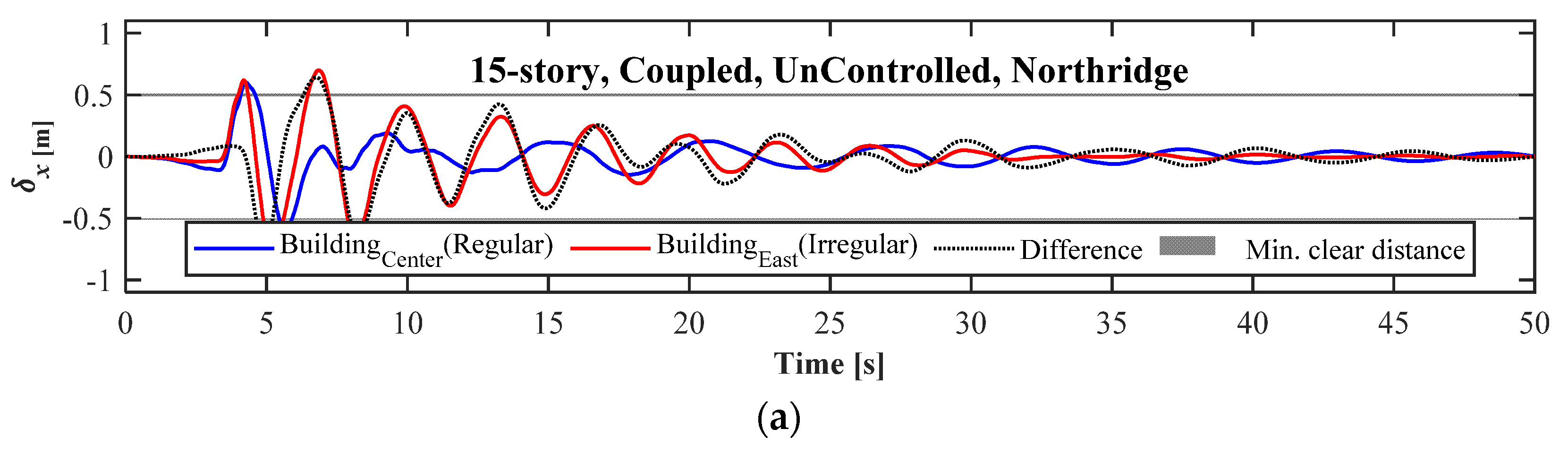
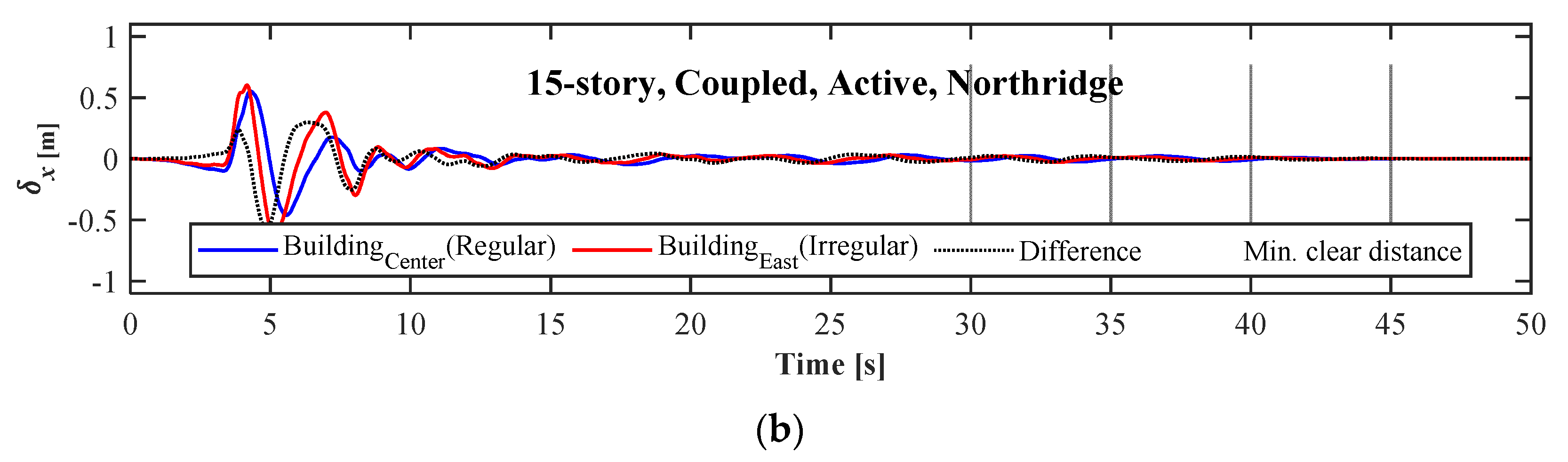
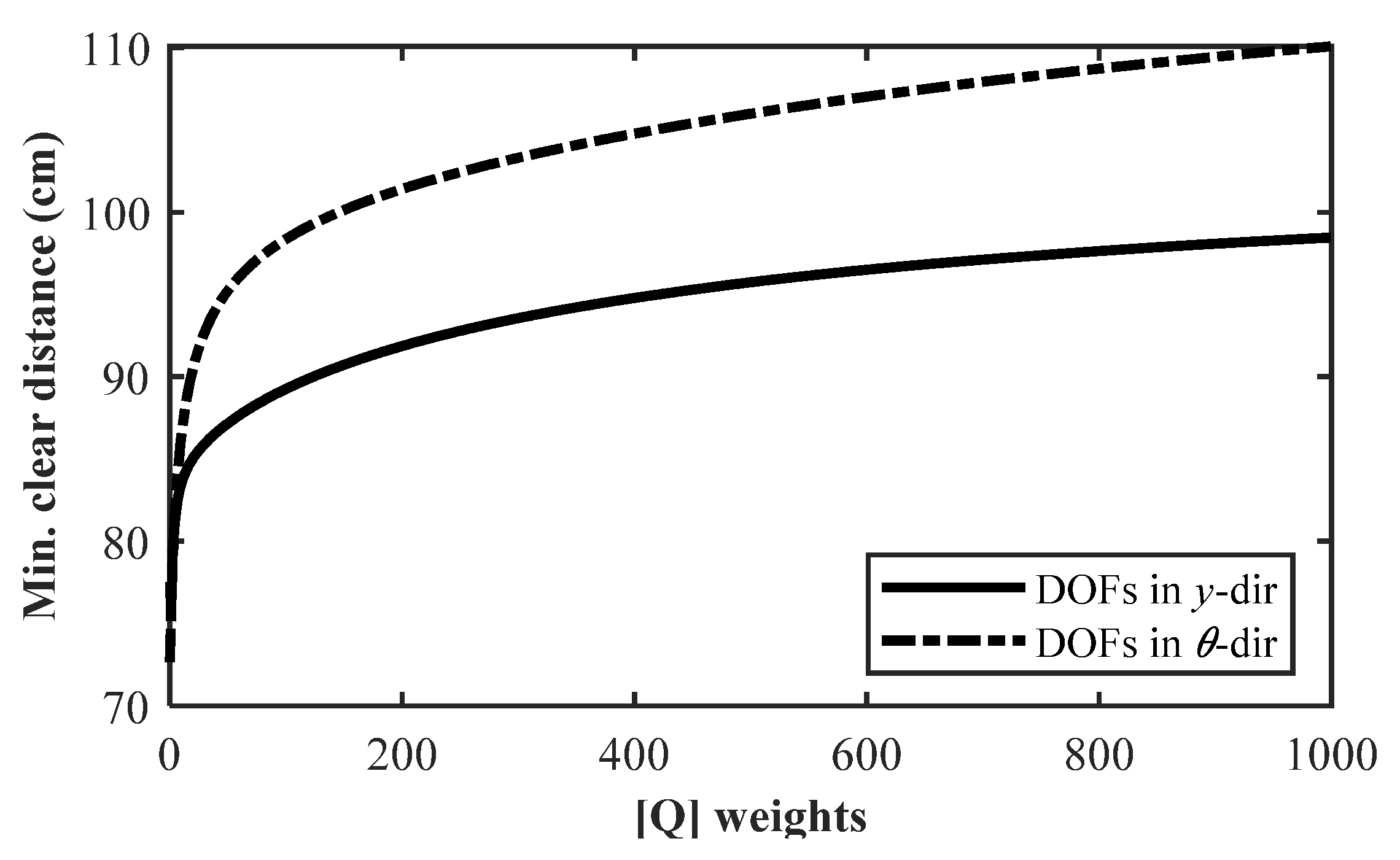
5.3. Pounding Hazard Mitigation by Coupling (Case-II)
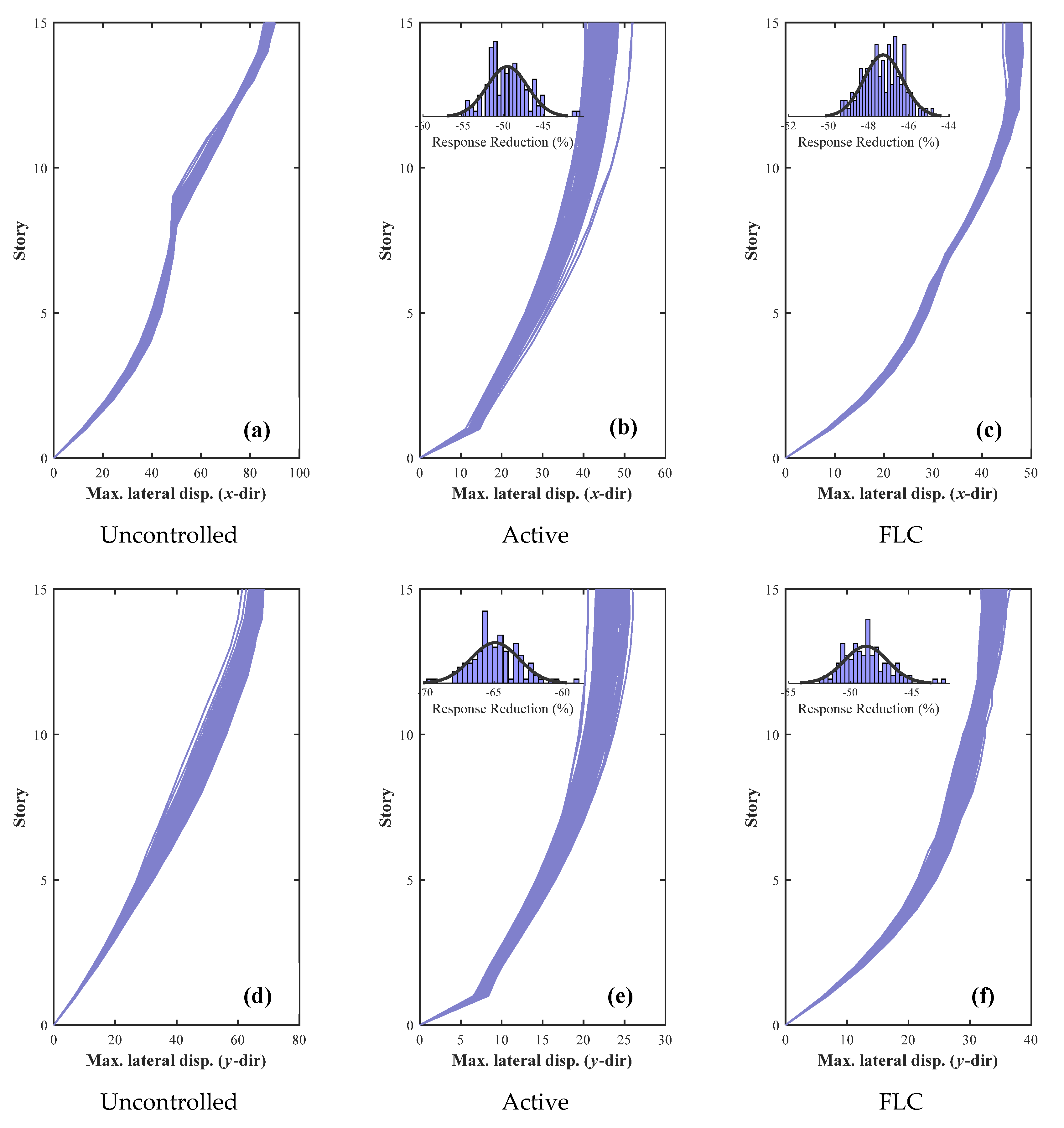
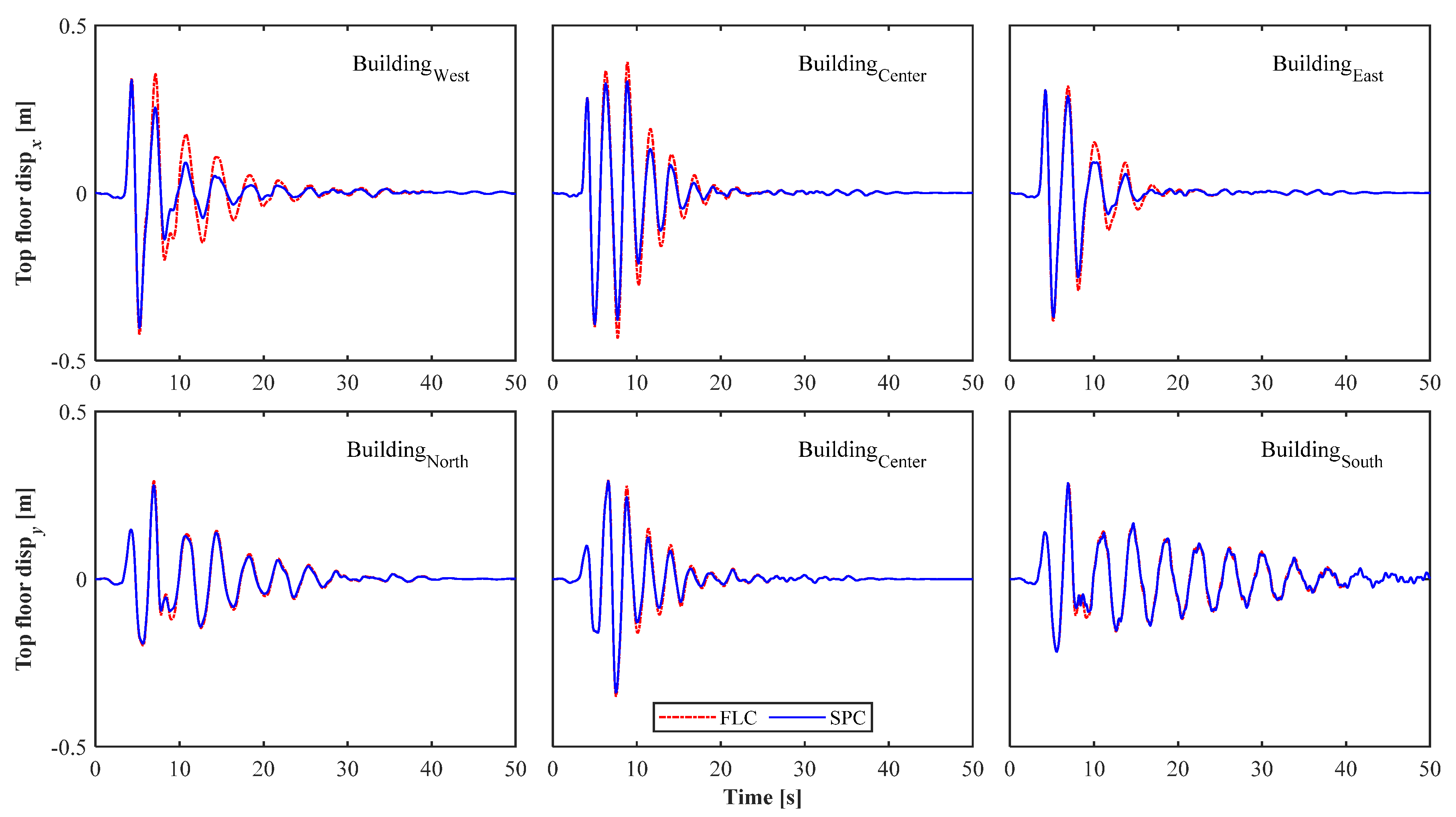
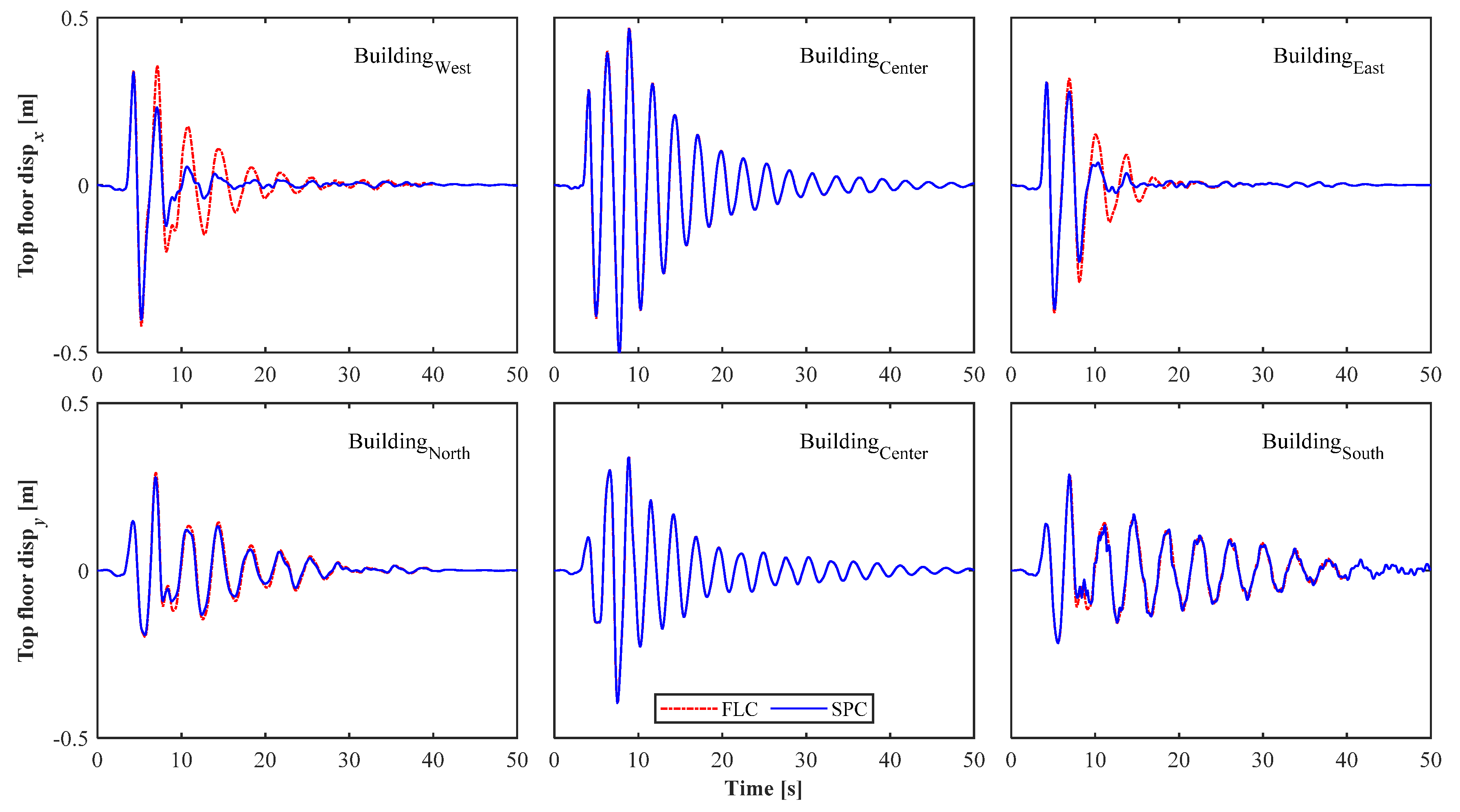
5.4. Advantages of SPC over Traditional FLC (Case-III)
6. Summary and Conclusions
- Despite the other control approaches, such as using coupling devices, the need for the structural links to couple the two adjacent buildings, as well as the complexity, can be eliminated.
- Each building can sense and consider the responses of the adjacent building in determining the optimal control force of semi-active devices; therefore, in the case of damage in a building, the other adjacent buildings update the control forces, accordingly.
- The proposed SPC can be modified for individual buildings according to the deployed control strategy and devices.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mosleh, A.; Rodrigues, H.; Varum, H.; Costa, A.; Arêde, A. Seismic behavior of RC building structures designed according to current codes. Structures 2016, 7, 1–13. [Google Scholar] [CrossRef]
- Azimi, M. Stiffeners Effect on Seismic Performance of I-Beam to Double-I Built-up Column Connection. Master’s Thesis, Iran University of Science and Technology, Tehran, Iran, November 2011. [Google Scholar]
- Amiri, G.G.; Azimi, M.; Darvishan, E. Retrofitting I-beam to double-I built-up column connections using through plates and T-stiffeners. Sci. Iran. 2013, 20, 1695–1707. [Google Scholar]
- Lin, J.L.; Tsai, K.C. Seismic analysis of two-way asymmetric building systems under bi-directional seismic ground motions. Earthq. Eng. Struct. Dyn. 2008, 37, 305–328. [Google Scholar] [CrossRef]
- Mashayekhi, M.; Santini-Bell, E. Three-dimensional multiscale finite element models for in-service performance assessment of bridges. Comput. Aided Civ. Inf. 2019, 34, 385–401. [Google Scholar] [CrossRef]
- Mashayekhizadeh, M. Fatigue Assessment of Complex Structural Components of Steel Bridges Integrating Finite Element Models and Field-Collected Data. Ph.D. Thesis, University of New Hampshire, Durham, NH, USA, 2018. [Google Scholar]
- Mohammadi, R.K.; Nasri, A.; Ghaffary, A. TADAS dampers in very large deformations. Int. J. Steel Struct. 2017, 17, 515–524. [Google Scholar] [CrossRef]
- Ghaffary, A.; Karami Mohammadi, R. Framework for virtual hybrid simulation of TADAS frames using opensees and abaqus. J. Vib. Control. 2018, 24, 2165–2179. [Google Scholar] [CrossRef]
- Amini, F.; Samani, M.Z. A wavelet-based adaptive pole assignment method for structural control. Comput. Aided Civ. Inf. 2014, 29, 464–477. [Google Scholar] [CrossRef]
- Uz, M.E.; Hadi, M.N.S. Optimal design of semi active control for adjacent buildings connected by MR damper based on integrated fuzzy logic and multi-objective genetic algorithm. Eng. Struct. 2014, 69, 135–148. [Google Scholar] [CrossRef] [Green Version]
- Abdeddaim, M.; Ounis, A.; Djedoui, N.; Shrimali, M.K. Pounding hazard mitigation between adjacent planar buildings using coupling strategy. J. Civ. Struct. Health Monit. 2016, 6, 603–617. [Google Scholar] [CrossRef]
- Chandiramani, N.K.; Motra, G.B. Lateral-torsional response control of MR damper connected buildings. In Proceedings of the ASME 2013 International Mechanical Engineering Congress and Exposition, San Diego, CA, USA, 15–21 November 2013. [Google Scholar]
- Bozorgvar, M.; Zahrai, S.M. Semi-active Seismic Control of Buildings Using MR Damper and Adaptive Neural-fuzzy Intelligent Controller Optimized with Genetic Algorithm. J. Vib. Control 2019, 25, 273–285. [Google Scholar] [CrossRef]
- Kaveh, A.; Dadras Eslamlou, A. An efficient two-stage method for optimal sensor placement using graph-theoretical partitioning and evolutionary algorithms. Struct. Control Health 2019, 26, e2325. [Google Scholar] [CrossRef]
- Kaveh, A.; Dadras, A. Structural damage identification using an enhanced thermal exchange optimization algorithm. Eng. Optimiz. 2018, 50, 430–451. [Google Scholar] [CrossRef]
- Cimellaro, G.P.; Lopez-Garcia, D. Algorithm for design of controlled motion of adjacent structures. Struct. Control Health 2011, 18, 140–148. [Google Scholar] [CrossRef]
- Anajafi, H.; Poursadr, K.; Roohi, M.; Santini-Bell, E. Effectiveness of Seismic Isolation for Long-period Structures Subject to Far-field and Near-field Excitations. Front. Built Environ. 2020, 6, 24. [Google Scholar]
- Roohi, M.; Hernandez, E.M.; Rosowsky, D. Nonlinear Seismic Response Reconstruction and Performance Assessment of Instrumented Wood-frame Buildings—Validation using NEESWood Capstone Full-Scale Tests. Struct. Control Health 2019, 26, e2373. [Google Scholar] [CrossRef]
- Hernandez, E.; Roohi, M.; Rosowsky, D. Estimation of element-by-element demand-to-capacity ratios in instrumented SMRF buildings using measured seismic response. Earthq. Eng. Struct. Dyn 2018, 47, 2561–2578. [Google Scholar]
- Cruz, E.F.; Cominetti, S. Three-dimensional buildings subjected to bi-directional earthquakes. Validity of analysis considering uni-directional earthquakes. In Proceedings of the 12th World Conference on Earthquake Engineering, Auckland, New Zeland, 30 January–4 February 2000. [Google Scholar]
- Heo, J.S.; Lee, S.K.; Park, E.; Lee, S.H.; Min, K.W.; Kim, H.; Jo, J.; Cho, B.H. Performance test of a tuned liquid mass damper for reducing bidirectional responses of building structures. Struct. Des. Tall Spec. 2009, 18, 789–805. [Google Scholar] [CrossRef]
- Yanik, A.; Aldemir, U.; Bakioglu, M. A new active control performance index for vibration control of three-dimensional structures. Eng. Struct. 2014, 62, 53–64. [Google Scholar] [CrossRef]
- Nigdeli, S.M.; Boduroğlu, M.H. Active Tendon Control of Torsionally Irregular Structures under Near-Fault Ground Motion Excitation. Comput. Aided Civ. Inf. 2013, 28, 718–736. [Google Scholar] [CrossRef]
- Wu, W.H.; Wang, J.F.; Lin, C.C. Systematic assessment of irregular building–soil interaction using efficient modal analysis. Earthq. Eng. Struct. Dyn. 2001, 30, 573–594. [Google Scholar] [CrossRef]
- Wolf, J.P. Soil-structure-interaction analysis in time domain. Nucl. Eng. Des. 1989, 111, 381–393. [Google Scholar] [CrossRef]
- Lin, C.-C.; Chang, C.-C.; Wang, J.-F. Active control of irregular buildings considering soil–structure interaction effects. Soil. Dyn. Earthq. Eng. 2010, 30, 98–109. [Google Scholar] [CrossRef] [Green Version]
- Farshidianfar, A.; Soheili, S. Ant colony optimization of tuned mass dampers for earthquake oscillations of high-rise structures including soil–structure interaction. Soil. Dyn. Earthq. Eng. 2013, 51, 14–22. [Google Scholar] [CrossRef]
- Alavi, A.H.; Hasni, H.; Lajnef, N.; Chatti, K.; Faridazar, F. An intelligent structural damage detection approach based on self-powered wireless sensor data. Automat. Constr. 2016, 62, 24–44. [Google Scholar] [CrossRef]
- Ashtiani, R.S.; Little, D.N.; Rashidi, M. Neural network based model for estimation of the level of anisotropy of unbound aggregate systems. Transp. Geotech. 2018, 15, 4–12. [Google Scholar] [CrossRef]
- Roohi, M.; Hernandez, E.M. Performance-based Post-earthquake Decision-making for Instrumented Buildings. arXiv 2020, arXiv:2002.11702. [Google Scholar]
- Gerist, S.; Maheri, M.R. Multi-stage approach for structural damage detection problem using basis pursuit and particle swarm optimization. J. Sound. Vib. 2016, 384, 210–226. [Google Scholar] [CrossRef]
- Azimi, M. Design of Structural Vibration Control Using Smart Materials and Devices for Earthquake-Resistant and Resilient Buildings. Master’s Thesis, North Dakota State University, Fargo, ND, USA, 2017. [Google Scholar]
- Cheng, F.Y.; Jiang, H.; Lou, K. Smart Structures: Innovative Systems for Seismic Response Control; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Nazarimofrad, E.; Zahrai, S.M. Seismic control of irregular multistory buildings using active tendons considering soil–structure interaction effect. Soil. Dyn. Earthq. Eng. 2016, 89, 100–115. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures: Theory and Applications to Earthquake Engineering; Prentice Hall: Upper Saddle River State, NJ, USA, 2011. [Google Scholar]
- Azimi, M.; Rasoulnia, A.; Lin, Z.; Pan, H. Improved semi-active control algorithm for hydraulic damper-based braced buildings. Struct. Control Health 2017, 24, e1991. [Google Scholar] [CrossRef]
- Azimi, M.; Pan, H.; Abdeddaim, M.; Lin, Z. Optimal Design of Active Tuned Mass Dampers for Mitigating Translational–Torsional Motion of Irregular Buildings. In Proceedings of the 7th International Conference on Experimental Vibration Analysis for Civil Engineering Structures, San Diego, CA, USA, 12–14 July 2017; pp. 586–596. [Google Scholar]
- Azimi, M.; Pekcan, G. Structural Health Monitoring Using Extremely Compressed Data through Deep Learning. Comput. Aided Civ. Inf. 2019. [Google Scholar] [CrossRef]
- Kaveh, A.; Bakhshpoori, T.; Azimi, M. Seismic optimal design of 3D steel frames using cuckoo search algorithm. Struct. Des. Tall Spec. 2015, 24, 210–227. [Google Scholar] [CrossRef]
- Dyke, S.J.; Spencer, B.F.; Sain, M.K.; Carlson, J.D. Phenomenological model of a magnetorheological damper. J. Eng. Mech. ASCE 1997, 123, 230–238. [Google Scholar]
- Nugroho, P.W.; Li, W.; Du, H.; Alici, G.; Yang, J. An Adaptive Neuro Fuzzy Hybrid Control Strategy for a Semiactive Suspension with Magneto Rheological Damper. Adv. Mech. Eng. 2014, 6, 487312. [Google Scholar] [CrossRef]
- Hu, Y.; Liu, L.; Rahimi, S. Seismic vibration control of 3D steel frames with irregular plans using eccentrically placed MR dampers. Sustainability 2017, 9, 1255. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motion | r | Stiffness | Damping |
|---|---|---|---|
| Swaying | |||
| Rocking | |||
| Twisting |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| c0a | 50,300 (N s/m) | αa | 8700 (N/m) |
| c0b | 48,700 (N s/m V) | αb | 6400 (N/m V) |
| c1a | 8,106,200 (N s/m) | γ | 496 m−2 |
| c1b | 7,807,900 (N s/m V) | β | 496 m−2 |
| k0 | 5.4E-6 (N/m) | A | 810.50 |
| k1 | 8.7E-6 (N/m) | n | 2 |
| x0 | 0.18 (m) | η | 190 s−1 |
| Earthquake 1 | Station and Direction | Magnitude (Mw) | PGA (g) | PGV (cm/s) |
|---|---|---|---|---|
| 1940 El Centro | El Centro Array #9 270° | 7.2 | 0.21 | 31.3 |
| El Centro Array #9 180° | 7.2 | 0.28 | 30.9 | |
| 1994 Northridge | Sylmar—Olive View Med FF 360° | 6.7 | 0.84 | 129.6 |
| Sylmar—Olive View Med FF 090° | 6.7 | 0.61 | 77.5 | |
| 1995 Kobe | H1170546.KOB 090° | 7.2 | 0.63 | 76.1 |
| H1170546.KOB 000° | 7.2 | 0.83 | 91.1 | |
| 1999 Chi-Chi | TCU068 N | 7.6 | 0.37 | 264.1 |
| TCU068 E | 7.6 | 0.51 | 249.6 | |
| 1971 San Fernando | Pacoima Dam 164° | 6.6 | 1.22 | 114.5 |
| Pacoima Dam 254° | 6.6 | 1.24 | 57.3 | |
| 1989 Loma Prieta | Hollister—South and Pine 0° | 6.9 | 0.37 | 63.0 |
| Hollister—South and Pine 0° | 6.9 | 0.18 | 30.9 | |
| 1992 Erzincan | Erzincan—EW | 6.7 | 0.50 | 78.2 |
| Erzincan—NS | 6.7 | 0.39 | 107.14 |
| Earthquake | Max. Response 1 | Uncontrolled | Active | Passive-min | Passive-max | FLC | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| El Centro | 0.15 | (0.31) | 0.08 | (0.11) | 0.13 | (0.28) | 0.08 | (0.20) | 0.07 | (0.17) | |
| 0.14 | (0.28) | 0.05 | (0.07) | 0.13 | (0.26) | 0.06 | (0.14) | 0.06 | (0.13) | ||
| 0.006 | (0.011) | 0.004 | (0.004) | 0.005 | (0.010) | 0.002 | (0.005) | 0.002 | (0.005) | ||
| 1.52 | (2.72) | 0.54 | (1.94) | 1.16 | (2.58) | 1.39 | (2.41) | 1.72 | (2.78) | ||
| 2.18 | (3.49) | 0.89 | (2.96) | 2.01 | (3.41) | 1.59 | (3.30) | 1.83 | (3.50) | ||
| Northridge | 0.42 | (0.75) | 0.20 | (0.28) | 0.40 | (0.73) | 0.27 | (0.60) | 0.25 | (0.55) | |
| 0.26 | (0.48) | 0.10 | (0.22) | 0.24 | (0.48) | 0.15 | (0.41) | 0.16 | (0.40) | ||
| 0.037 | (0.074) | 0.014 | (0.026) | 0.035 | (0.071) | 0.020 | (0.053) | 0.020 | (0.053) | ||
| 5.37 | (11.71) | 2.19 | (8.41) | 5.07 | (11.54) | 4.29 | (10.97) | 3.60 | (10.19) | ||
| 3.77 | (7.21) | 1.37 | (6.17) | 3.15 | (7.00) | 3.12 | (7.15) | 3.01 | (6.92) | ||
| Kobe | 0.29 | (0.48) | 0.08 | (0.14) | 0.26 | (0.45) | 0.13 | (0.28) | 0.13 | (0.28) | |
| 0.27 | (0.46) | 0.10 | (0.17) | 0.25 | (0.43) | 0.14 | (0.34) | 0.14 | (0.34) | ||
| 0.008 | (0.014) | 0.003 | (0.004) | 0.007 | (0.013) | 0.003 | (0.008) | 0.004 | (0.009) | ||
| 6.24 | (7.41) | 1.18 | (5.63) | 5.33 | (6.45) | 2.95 | (7.05) | 3.29 | (7.40) | ||
| 5.54 | (9.54) | 1.80 | (8.09) | 4.78 | (9.08) | 3.14 | (8.93) | 3.12 | (8.69) | ||
| Chi-Chi | 0.66 | (1.56) | 0.87 | (0.53) | 0.64 | (1.53) | 0.48 | (1.27) | 0.41 | (1.11) | |
| 0.39 | (0.91) | 0.99 | (0.47) | 0.38 | (0.91) | 0.33 | (0.83) | 0.29 | (0.73) | ||
| 0.042 | (0.089) | 0.030 | (0.025) | 0.040 | (0.086) | 0.025 | (0.066) | 0.027 | (0.064) | ||
| 4.66 | (7.85) | 1.33 | (5.88) | 4.00 | (7.78) | 2.24 | (7.02) | 2.35 | (6.94) | ||
| 3.22 | (6.62) | 1.44 | (5.49) | 2.85 | (6.48) | 2.47 | (6.20) | 2.53 | (5.78) | ||
| San Fernando | 0.33 | (0.62) | 0.16 | (0.31) | 0.32 | (0.60) | 0.24 | (0.52) | 0.22 | (0.47) | |
| 0.15 | (0.19) | 0.05 | (0.12) | 0.13 | (0.17) | 0.08 | (0.17) | 0.08 | (0.17) | ||
| 0.017 | (0.030) | 0.009 | (0.015) | 0.016 | (0.029) | 0.010 | (0.021) | 0.010 | (0.020) | ||
| 5.28 | (11.44) | 2.65 | (11.79) | 4.83 | (11.30) | 4.05 | (10.92) | 3.76 | (11.06) | ||
| 3.95 | (12.12) | 2.87 | (11.94) | 3.38 | (12.40) | 3.56 | (12.17) | 3.55 | (12.91) | ||
| Loma Prieta | 0.29 | (0.52) | 0.13 | (0.22) | 0.28 | (0.51) | 0.20 | (0.43) | 0.18 | (0.39) | |
| 0.13 | (0.32) | 0.11 | (0.10) | 0.12 | (0.28) | 0.08 | (0.17) | 0.08 | (0.15) | ||
| 0.018 | (0.035) | 0.009 | (0.014) | 0.015 | (0.032) | 0.009 | (0.020) | 0.008 | (0.018) | ||
| 3.33 | (6.25) | 1.12 | (4.00) | 3.09 | (5.99) | 2.46 | (5.58) | 2.15 | (5.16) | ||
| 1.50 | (1.96) | 0.56 | (1.71) | 1.13 | (2.15) | 1.29 | (2.17) | 1.44 | (2.27) | ||
| Erzincan | 0.29 | (0.63) | 0.13 | (0.20) | 0.25 | (0.58) | 0.16 | (0.44) | 0.14 | (0.36) | |
| 0.41 | (0.77) | 0.19 | (0.28) | 0.39 | (0.76) | 0.27 | (0.64) | 0.25 | (0.57) | ||
| 0.030 | (0.066) | 0.016 | (0.023) | 0.029 | (0.064) | 0.019 | (0.049) | 0.018 | (0.045) | ||
| 2.94 | (6.21) | 1.14 | (4.88) | 2.21 | (5.93) | 1.94 | (4.92) | 1.84 | (4.42) | ||
| 4.00 | (6.00) | 1.57 | (5.20) | 3.89 | (6.05) | 2.77 | (6.08) | 2.91 | (5.76) | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azimi, M.; Molaei Yeznabad, A. Swarm-based Parallel Control of Adjacent Irregular Buildings Considering Soil–structure Interaction. J. Sens. Actuator Netw. 2020, 9, 18. https://doi.org/10.3390/jsan9020018
Azimi M, Molaei Yeznabad A. Swarm-based Parallel Control of Adjacent Irregular Buildings Considering Soil–structure Interaction. Journal of Sensor and Actuator Networks. 2020; 9(2):18. https://doi.org/10.3390/jsan9020018
Chicago/Turabian StyleAzimi, Mohsen, and Asghar Molaei Yeznabad. 2020. "Swarm-based Parallel Control of Adjacent Irregular Buildings Considering Soil–structure Interaction" Journal of Sensor and Actuator Networks 9, no. 2: 18. https://doi.org/10.3390/jsan9020018
APA StyleAzimi, M., & Molaei Yeznabad, A. (2020). Swarm-based Parallel Control of Adjacent Irregular Buildings Considering Soil–structure Interaction. Journal of Sensor and Actuator Networks, 9(2), 18. https://doi.org/10.3390/jsan9020018