2.4. State-and-Transition Simulation Modeling
We resampled the system-class rasters from their original 5 m resolution to 50 m due to computational limits imposed by hardware for STSM. To avoid losing small, ecologically important vegetation types, ecological systems and vegetation classes were resampled according to a user-defined hierarchy (
Supplemental File S2). Small or linear ecological systems and vegetation classes, and systems critical to species success were given higher priority than common systems, which were resampled with majority rule. These final rasters represent “current condition” vegetation.
STSMs were simulated for 60 years using ST-Sim, a module in the SyncroSim platform (
www.ApexRMS.com;
www.syncrosim.com, both accessed on 14 January 2020, [
8]). ST-Sim simulations share many characteristics with Markov chains. Added components, such as management actions, area implementation targets, and time dependent functions, distinguish ST-Sim simulations from Markov chains [
8]. In ST-Sim, each pixel was assigned an initial condition state (a state is the combination of an ecological system, usually static, and a vegetation class) obtained from remote sensing that can either (a) age one time step and stay in the same class, (b) age one time step into an older class (i.e., succession), or (c) experience a probabilistic disturbance and transition to ≥1 other states, including the originating state. Transitions are probabilistic (ecological disturbances and, sometimes, succession) or deterministic (succession to another class after a fixed number of years). Land management actions were implemented using area targets (e.g., 1000 ha∙yr
−1 seeded on average in designated vegetation classes). Probabilistic disturbances and management actions can be modified or constrained temporally or spatially to mimic real world processes such as climate variability, fire spread behavior, and equipment operation limits.
Fire disturbances had widespread influence on vegetation structure and management actions. The mean fire return interval per ecological system was calculated based on (1) nonspatial reference simulations without post-European influences that were run for 700 years to reach equilibrium and (2) the duration of succession classes, each with different fire return intervals (
Table 1). Presettlement fire return intervals used by reference simulations were suppressed by 90% for management simulations because current fire management precludes most natural fire regimes. The record of unique fires from the federal fire occurrence data [
18] for 1980 to 2016 and Monitoring Trends in Burn Severity data [
19] from 1984 to 2016 showed that the BLM’s exclusion success was about 90% both in terms of number of fires and area burned, compared to reference simulation results.
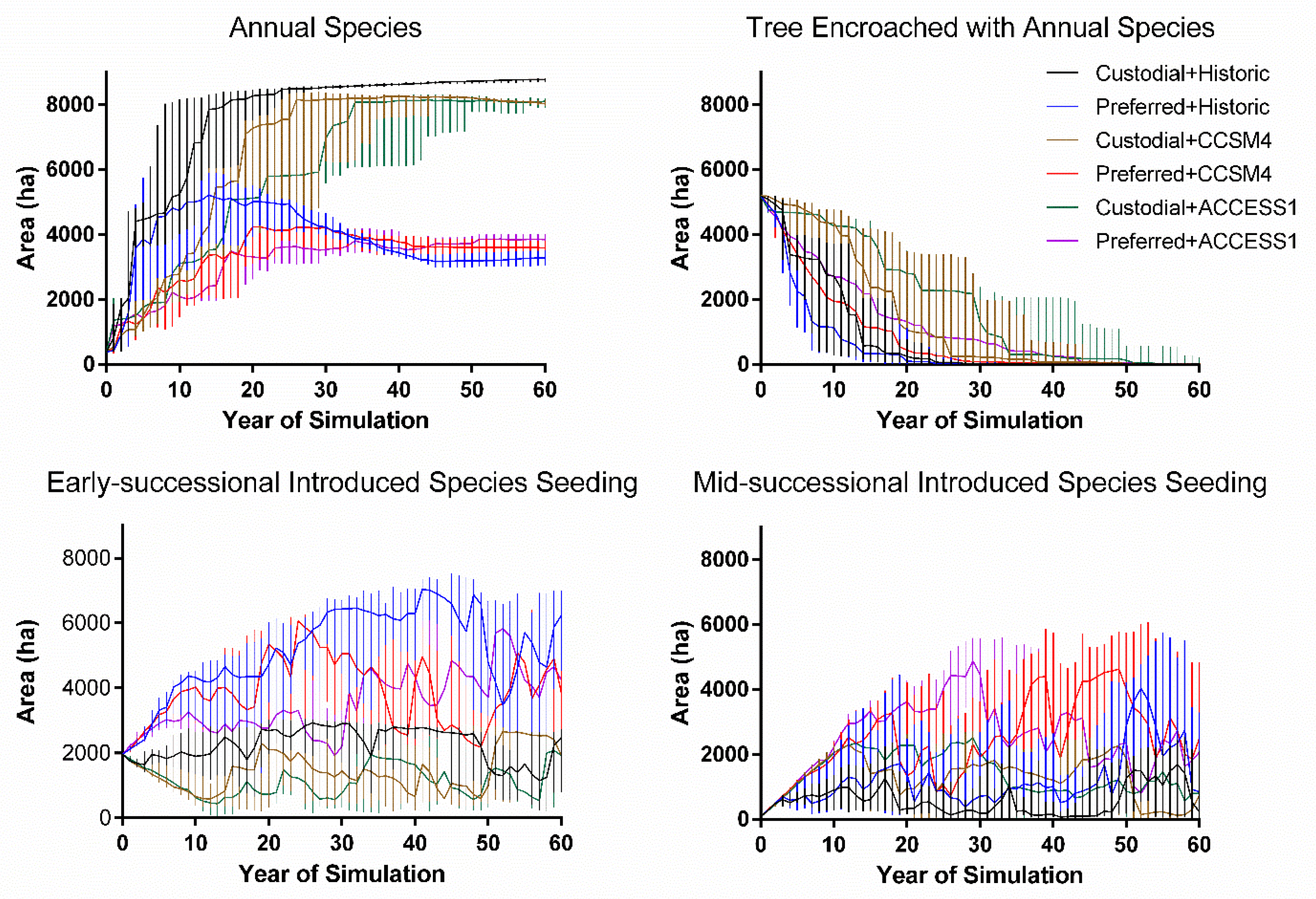
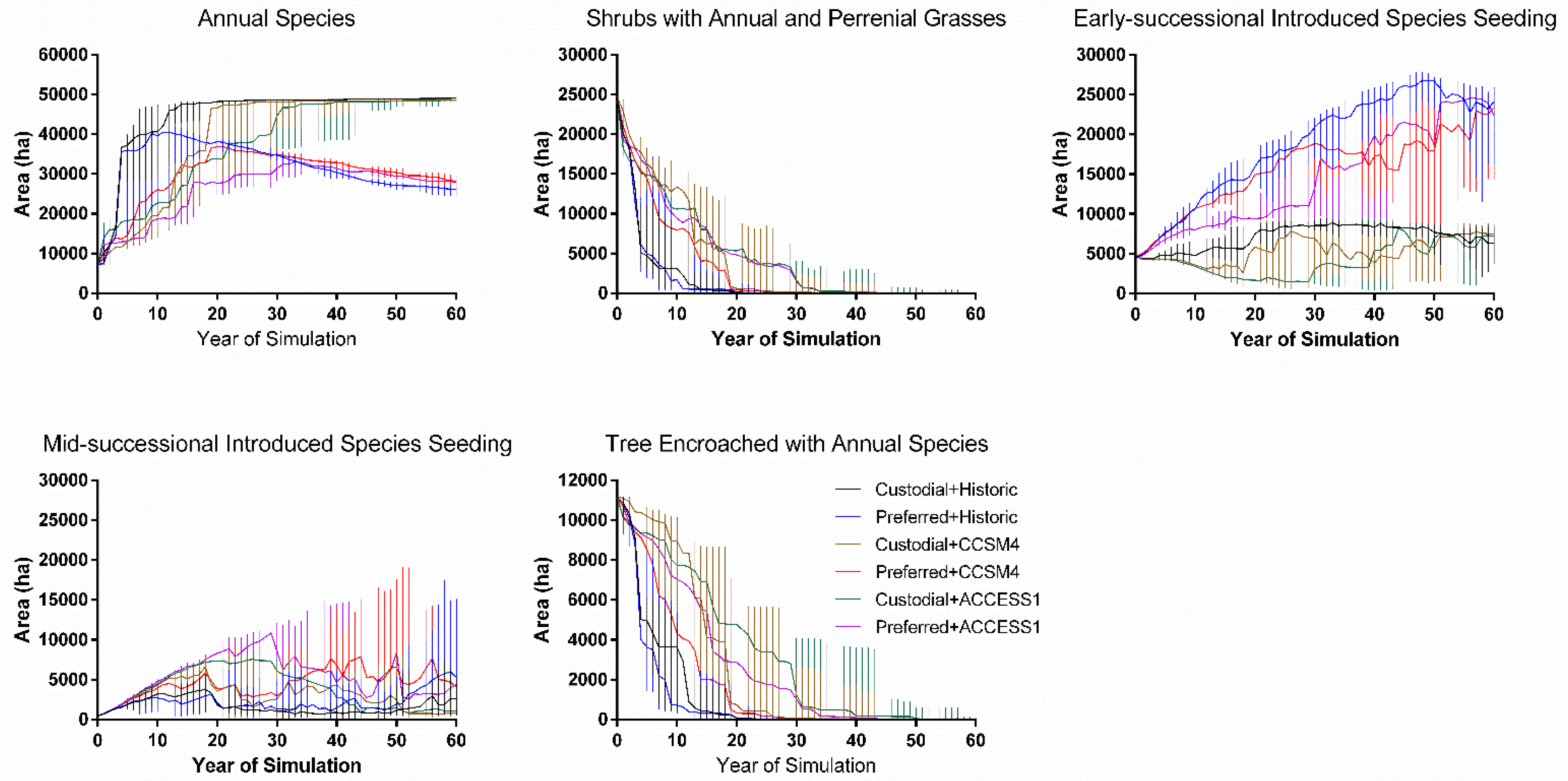
2.6. Management Scenarios
A management scenario is a group of land management actions and specific climate effects that define a simulation theme. Six management scenarios were simulated for 60 years. The six scenarios combine two land management levels with three future climates.
Custodial Management represents only baseline management actions of fire suppression and livestock management.
Preferred Management includes active management in addition to baseline management actions. While USD 0 was assigned to the
Custodial Management scenario, the
Preferred Management scenario was limited to maximum annual expenditures levels of USD 1 million from years 1 to 10 with an emphasis on lower elevation sagebrush systems, USD 1 million from years 11 to 25 with an emphasis on higher elevation sagebrush systems, USD 500,000 from years 26 to 45, and USD 100,000 from year 46 to 60 for maintenance activities. If simulated treatments cannot find enough areas to treat, realized expenditures will be less than the maximum allowed. A list of management actions was selected by agency experts per ecological systems. Each action was assigned a cost per area (
Table 4) and other implementation attributes were imbedded in the simulation library: success and failure proportions, vegetation class outcomes for success and failures, and slope constraints.
Future climates were combined with the management levels. The “control” climate scenario was historic climate data from 1950 to 2018 obtained from the Parameter–elevation Relationships on Independent Slopes Model (PRISM; [
22]). This period captured the severe droughts of the 1950s and represented better climate station instrumentation after the Second World War. For future climate warming, two LOcalized Constructed Analogs (LOCA; Western Regional Climate Center’s SCENIC site, [
23,
24]) were selected by local stakeholders to compare a worst-case future climate to the observed climate trend. The ACCESS1 LOCA represents the worst-case climate with the driest conditions in all seasons. The CCSM4 LOCA was selected by BLM managers and TNC staff because its projections reflect their observations about increasingly wetter spring and summer seasons, and drier and hotter winters.
The ACCESS 1.0 is one of two versions of the Australian Community Climate and Earth System Simulator coupled model (ACCESS-CM) that was built by coupling the UK Met Office atmospheric Unified Model UM, and other submodels, to the ACCESS Ocean Model (ACCESS-OM), a coupled ocean–sea ice model consisting of the NOAA/GFDL ocean model MOM4p1 and the LANL sea ice model CICE4.1, under the CERFACS OASIS3.2-5 coupling framework [
25]. The Community Climate System Model (CCSM) is a coupled global climate model (GCM) developed by the University Corporation for Atmospheric Research (UCAR) [
26]. CCSM4 includes four submodels (land, sea ice, ocean, and atmosphere) connected by a coupler that exchanges information with the submodels.
Minimum and maximum temperature, and precipitation time series were annually averaged across the landscape to capture the temporal variability for each climate. The six management–climate scenarios that combined with precipitation and minimum and maximum temperature yielded 18 (=6 scenarios × 3 climate time series) time series. In addition to temperature and precipitation, the 100-year time series of future CO
2 from the A2 scenario (aggressive business-as-usual emissions scenario) was downloaded from IPCC [
27]. A stochastic weather generator (SWG) [
28] was used to replicate each climate time series 10 times over 65 years. Estimating severe drought in any year, which considers climate conditions for the previous five years [
29], required that the time series be simulated over 65 years rather than 60 years with the first of the five years starting in year 1945. The CO
2 time series was not replicated as it has no variability and smoothly trends upward over time.
The purpose of simulating future climate was to introduce temporal variability in dominant ecological processes [
10]. Variability directly affects processes through temperature and precipitation, or indirectly mediates processes through the Standard Precipitation Index (SPI). SPI is a standardized drought index based on precipitation and is expressed in positive (wet) and negative (dry) standard deviations from the mean [
30,
31]. SPI was calculated using the “spei” function in R package ‘SPEI’ [
32]. The time series created with the SWG were the inputted climate data to the “spei” R function. To establish a climate warming difference before and after mapping (year 2013), the R code replicated future time series after 2013 while statistically considering the historic period from 1945 to 2013.
Temperature, precipitation, or SPI time series were transformed into transition multipliers in ST-Sim [
10]. Transition multipliers are a quantitative means to determine how climate variations influence ecological processes. A transition multiplier is a varying annual unitless number ≥0 in an annual time series that multiplies a base disturbance rate in the STSM. For example, a transition multiplier of one implies no change in the annual probability for fire, a transition of zero is a complete suppression of fire, and a transition of three triples the annual probability of fire.
A transition multiplier can be obtained from empirical data or theoretically derived. Transition multipliers are also the mechanism by which replicates are created for each scenario. Transition multipliers are determined by dividing each yearly value of the time series (for example, area burned) by the temporal average of the time series, thus creating a nondimensional time series with an average of one, which means that the whole temporal multiplier time series has no effect on the model’s base rate. The process of associating time series of temperature, precipitation, SPI, and CO
2 with specific ecological processes deserves fundamental research (
Supplemental File S4) [
10]. Ecological processes whose variability was affected by climate were: Exotic Species Invasion, May Hard Freeze (aspen woodland only), 36 month drought mortality, 24 month drought mortality, Severe Drought, Shrubland Fire Activity, Shrubland and Forest Fire Activity, Wet Year, Very Wet Year, Annual Species Invasion, Tree (native) Invasion, and Flooding (
Supplemental File S4).
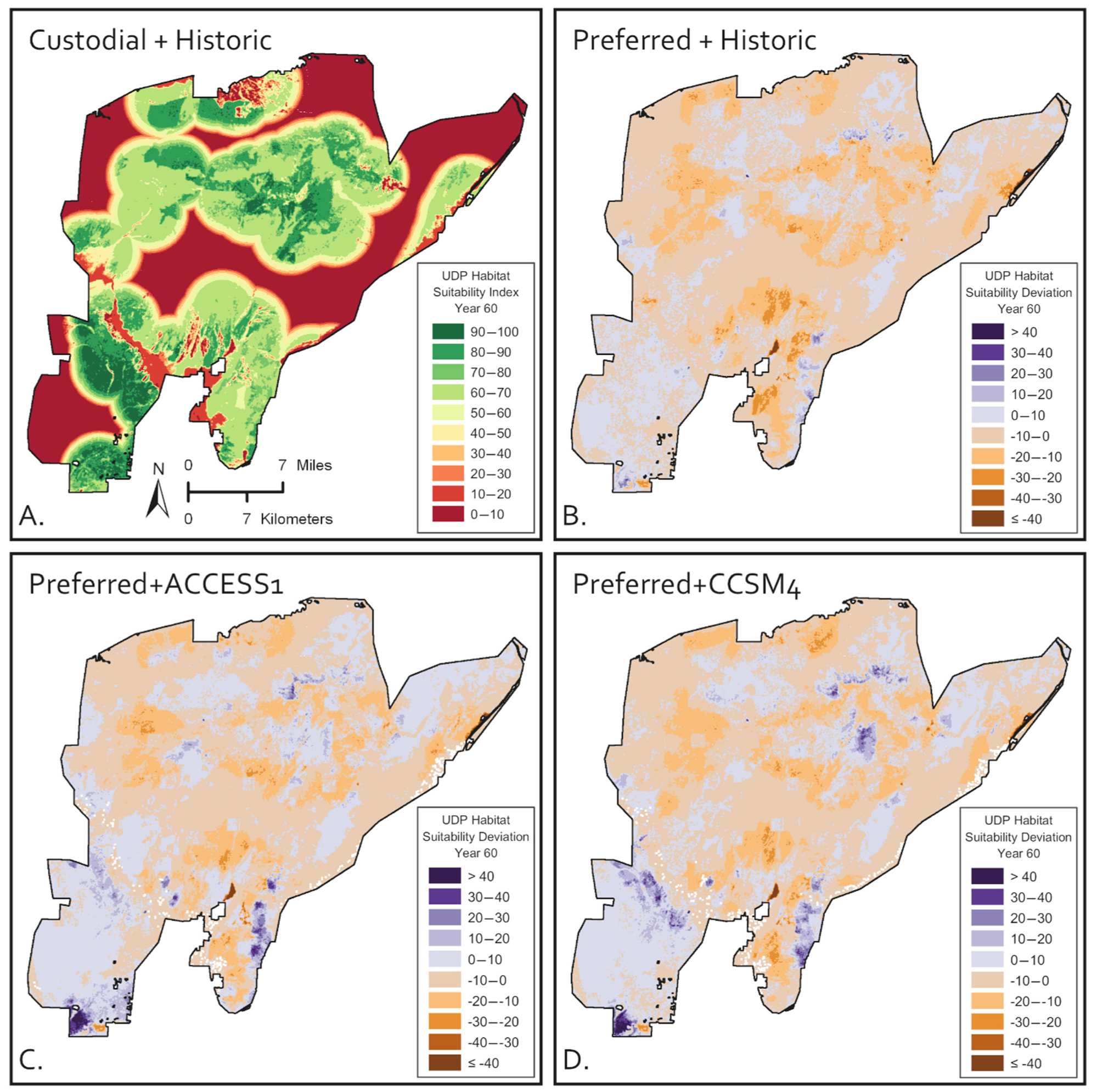
2.8. Unified Ecological Departure
Unified ecological departure is the first of three metrics of condition. Traditional ecological departure was pioneered by the LANDFIRE program and is the dissimilarity between the observed distribution of vegetation class percentages and the predicted presettlement or natural distribution of vegetation class percentages obtained from presettlement equilibrium simulations. The latter is called the natural range of variability, per ecological system (
NRV; [
5]):
where
i is the number of
R reference classes.
Unified ecological departure is coded into ST-Sim’s menu
Ecological Departure and begins with ecological departure calculated as above, and then (1) scores the departure higher (makes condition worse) according to levels of vegetation class undesirability present (e.g., noxious forbs) and (2) scores the departure slightly lower (makes condition slightly better) according to agreed-upon management threshold levels of allowable uncharacteristic classes present (e.g., introduced species seeding):
where
R,
U(No-Thresh), and
N are, respectively, number of reference classes, uncharacteristic classes without threshold values, and total vegetation classes.
Threshold(j) is a user-supplied management threshold for class
j, and
HRF(j) is the high-risk function of class
j for different levels of “undesirability.” Uncharacteristic vegetation classes with an undesirability level >0 are assigned a high risk value based on the arbitrary function
HRF selected based on desirable curve fitting properties. We chose a negative sigmoid function for
HRF:
where c is an arbitrary fitted coefficient (here 10) and B is the undesirability level from the table.
HRF = 0, −0.5, and −1 for, respectively, values of B = 0, 1, and 2. When thresholds and
HRFs are not specified in ST-Sim, the
UED equation simplifies to the
ED equation.
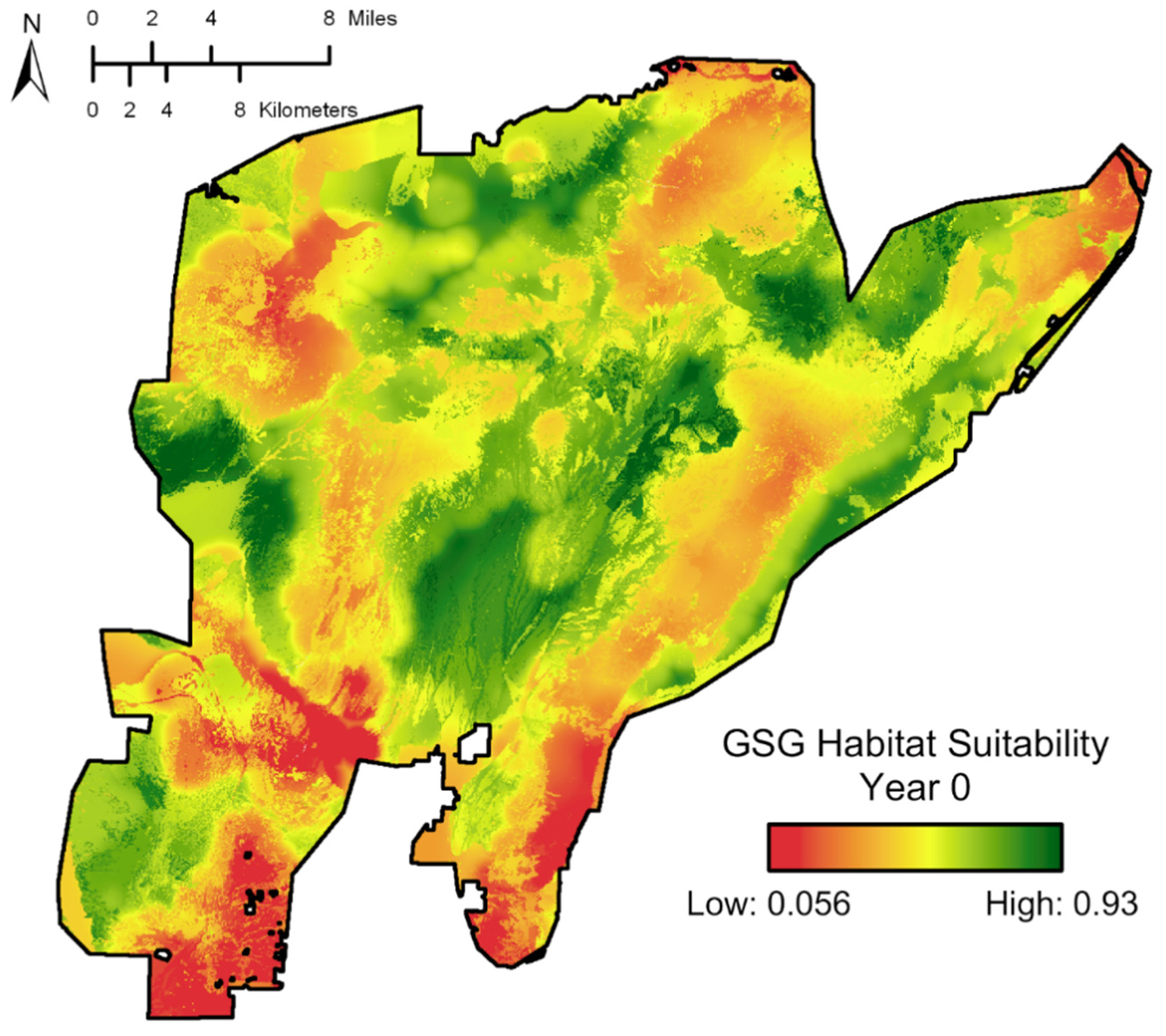
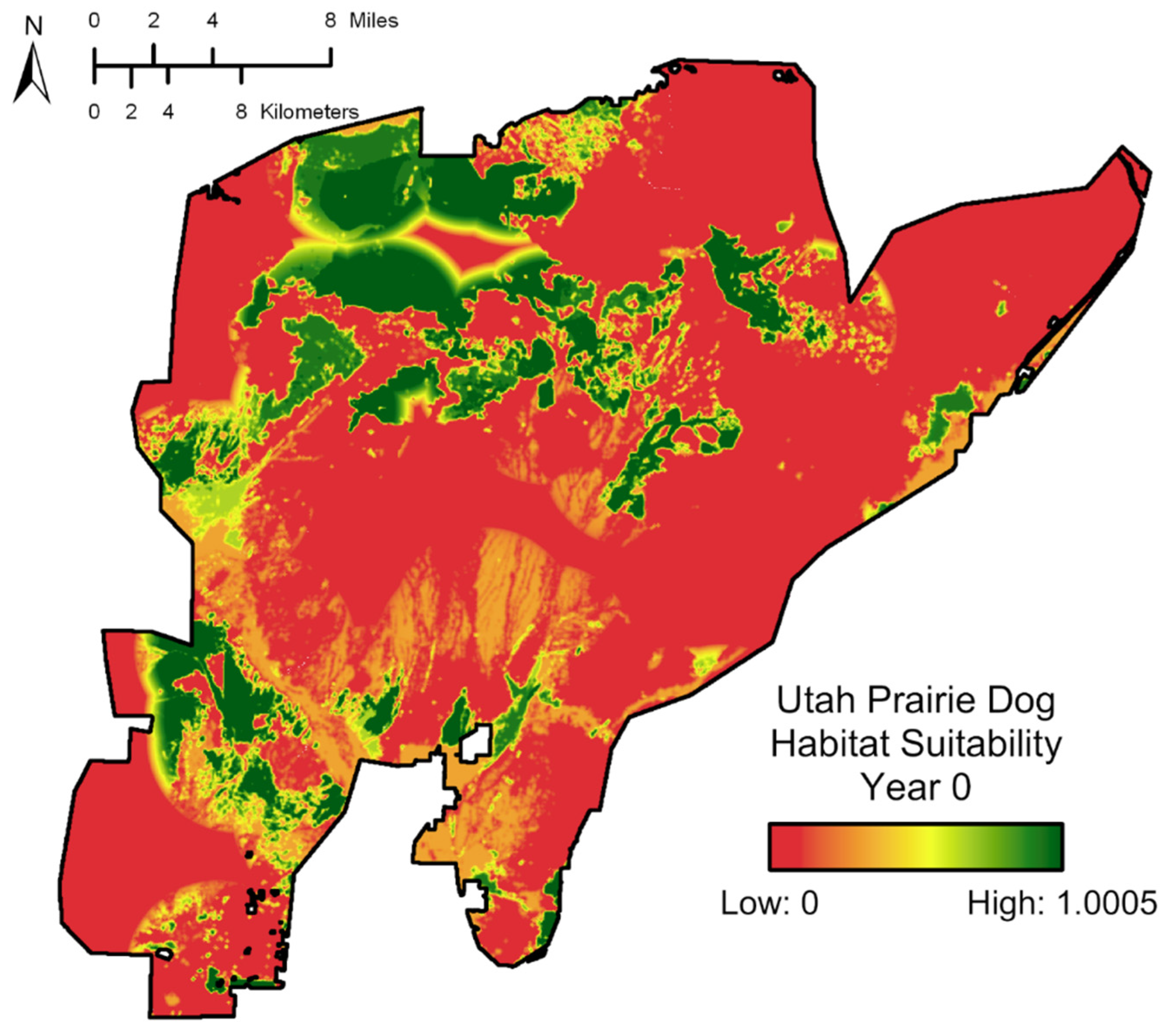
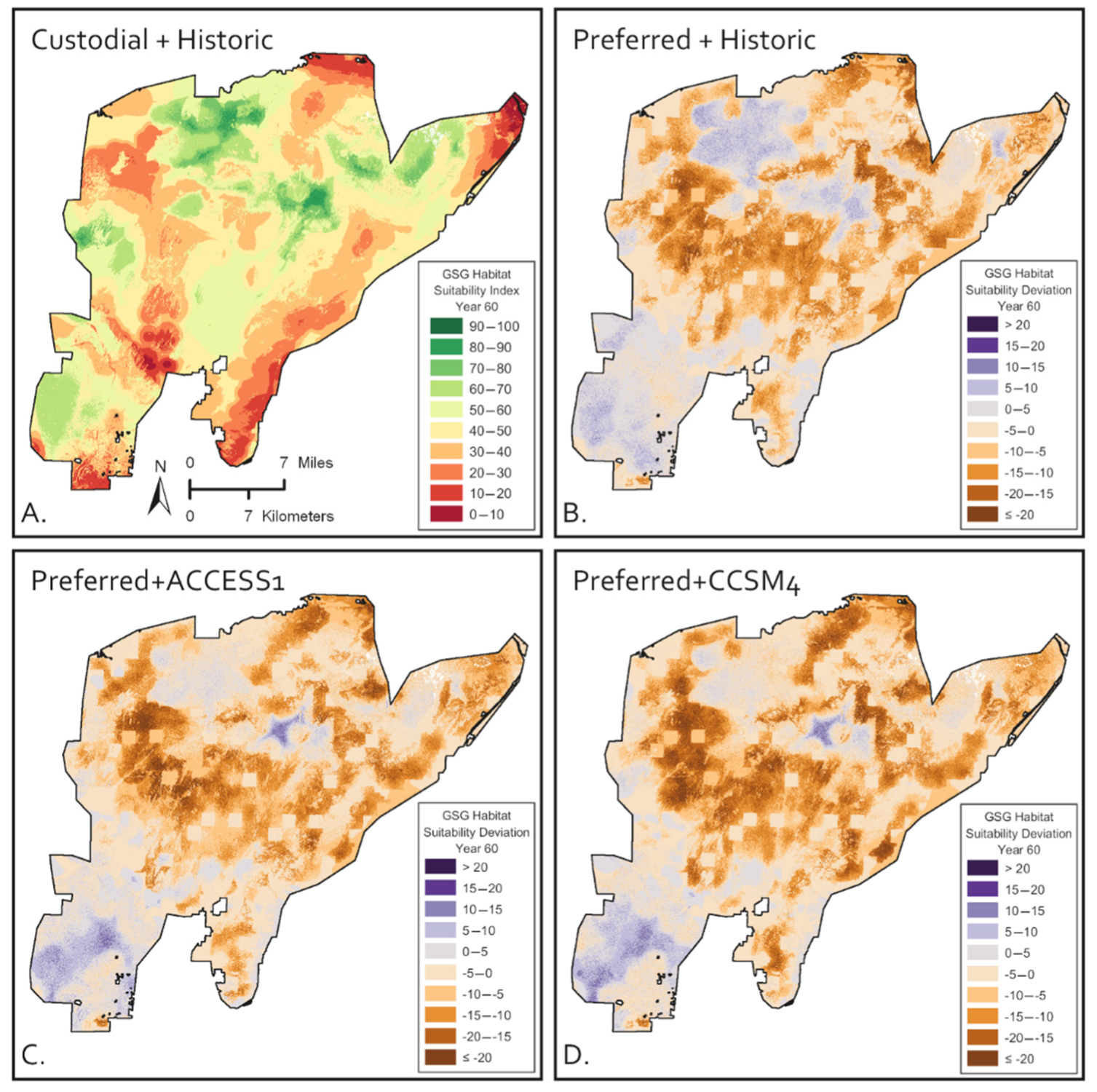
2.9. Greater Sage-Grouse Habitat Suitability
Rasters of current and simulated vegetation were used to estimate current and future species habitat suitability. These metrics identify areas that would benefit most from management and restoration. Restoring already good GSG habitat wastes limited resources as these areas will remain good habitat without intervention. Poor habitat areas far from leks or wet systems would not benefit from restoration due to strong distance limitations. Coupling spatial STSMs and a custom R script enabled the model to place management actions in areas of intermediate GSG habitat suitability where efforts would be most beneficial.
GSG habitat suitability was estimated for each pixel with a custom-made R program used as a stand-alone application, or dynamically coupled to ST-Sim to constrain implementation of management actions. Overall GSG habitat suitability was the average of three groups of seasonal Resource Selection Functions (
RSF; [
4]). Seasonal habitats were nesting, summer, and winter. The
RSFs described below were the result of a GSG expert workshop held on 13 March at TNC’s office in Salt Lake City.
Heuristic RSFs were developed because there were only very limited movement data from collared GSG from the southern UT populations. Using GSG demographic and movement data from the entire State of Utah, experts assisted with defining the shape of resource selection functions that had the strongest effect on GSG habitat suitability. Resource selection functions were scaled from 0 (not suitable) to 1 (very suitable). The independent variables for the different resource selection functions were distance to the closest critical attribute (e.g., type of vegetation, busy road), the proportion of a resource in the surrounding habitat, or the value of a pixel’s vegetation type as seasonal habitat.
Five resource selection functions (order of presentation is not related to importance and all
RSFs were assumed equal) characterized the nesting season (i.e., nesting;
RSF(N,i); see
Supplemental File S6 for detailed equations):
RSF(N,1): Distance of each pixel (nest site) to the closest lek—habitat suitability was high and increased up to a maximum at 5 km from the closest lek and then rapidly decreased with distance.
RSF(N,2): Distance of each pixel (nest site) to the closest trees—habitat suitability increased up to 2 km from trees, and farther than 2 km habitat was fully suitable.
RSF(N,3): Proportion of pixels with adequate shrub cover 1000 m around each pixel (nest site)—habitat suitability increased with the proportion of adequate pixels.
RSF(N,4): Distance of each pixel (nest site) to the closest busy road—habitat suitability increased with distance with the most severe reduction of suitability at less than 150 m from busy roads followed by a rapid increase, and no effect after 5 km.
RSF(N,5): Resource selection function was equal to the expert-defined value of the vegetation class (
Supplemental Table S6.1) to nesting habitat for each pixel (nest site).
Nesting habitat suitability index (HSI[N]) equals mean{RSF(N,1), RSF(N,2), RSF(N,3), RSF(N,4), RSF(N,5)}.
Four resource selection functions characterized the summer (i.e., brood-rearing) season (RSF[S,i]):
RSF(S,1): Distance of each pixel to the closest high-elevation shrubland pixels above 2134 m elevation that are late-brood habitat or to the closest wet meadow—habitat suitability was high up to 3 km from each pixel and then rapidly decreased with distance reaching zero at 12 km.
RSF(S,2): Distance of each pixel to the closest lek—habitat suitability remained high up to 5 km from each pixel to the closest lek and then decreased rapidly until it was nearly zero at 10 km.
RSF(S,3): Distance of each pixel to the closest trees—habitat suitability increased up to 2 km from trees and after 2 km habitat was fully suitable (same function as for nesting).
RSF(S41): Resource selection function was equal to the expert-defined value of the vegetation class (
Supplemental Table S6) to summer habitat for each pixel.
Summer habitat suitability index (HSI[S]) equals mean{RSF(S,1), RSF(S,2), RSF(S,3), RSF(S,4)}.
Three RSFs characterized the winter season (RSF[W,i]):
RSF(W,1): Distance of each focal (bird’s location) pixel to a distant pixel, which is only considered if the proportion of adequate winter shrub pixels (values > 0.3 from
Supplemental Table S6) in a 1015 m moving window from the distant pixel is >75%—if the distant pixel is acceptable, habitat suitability was 1 km up to 5 km from the closest lek and then rapidly decreased with distance.
RSF(W,2): Distance of each pixel to the closest low or black sagebrush pixel—habitat suitability linearly decreased up to a distance of 25 km and then became zero.
RSF(W,3): Resource selection function was equal to the expert-defined value of the vegetation class (
Supplemental Table S6) to winter habitat for each pixel.
Winter habitat suitability index (HSI[W]) equals mean{RSF(W,1), RSF(W,2), RSF(W,3)}.
Finally, the overall habitat suitability (
HSI) across all seasons was the average of seasonal habitat suitability multiplied by Simpson’s evenness index:
where
p(i) is
HSI(i)/(
HSI(N) +
HSI(
S) +
HSI(
W)). The resulting overall value per pixel was between 0 (not suitable) and 1 (maximally suitable). Statistical habitat suitability models are not constructed with multiple
HSIs or an evenness index (e.g., [
33,
34]). However, in the absence of sufficient demographic data, the above methods account for both the contribution of seasonal habitat suitability and whether some seasonal habitats were deficient and, as a result, lowered the overall habitat suitability [
33,
34] as the evenness index does.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}