
Numerical Simulation and PIV Experimental Investigation on Underwater Autorotating Rotor


Abstract
:1. Introduction
2. Experiment Setup
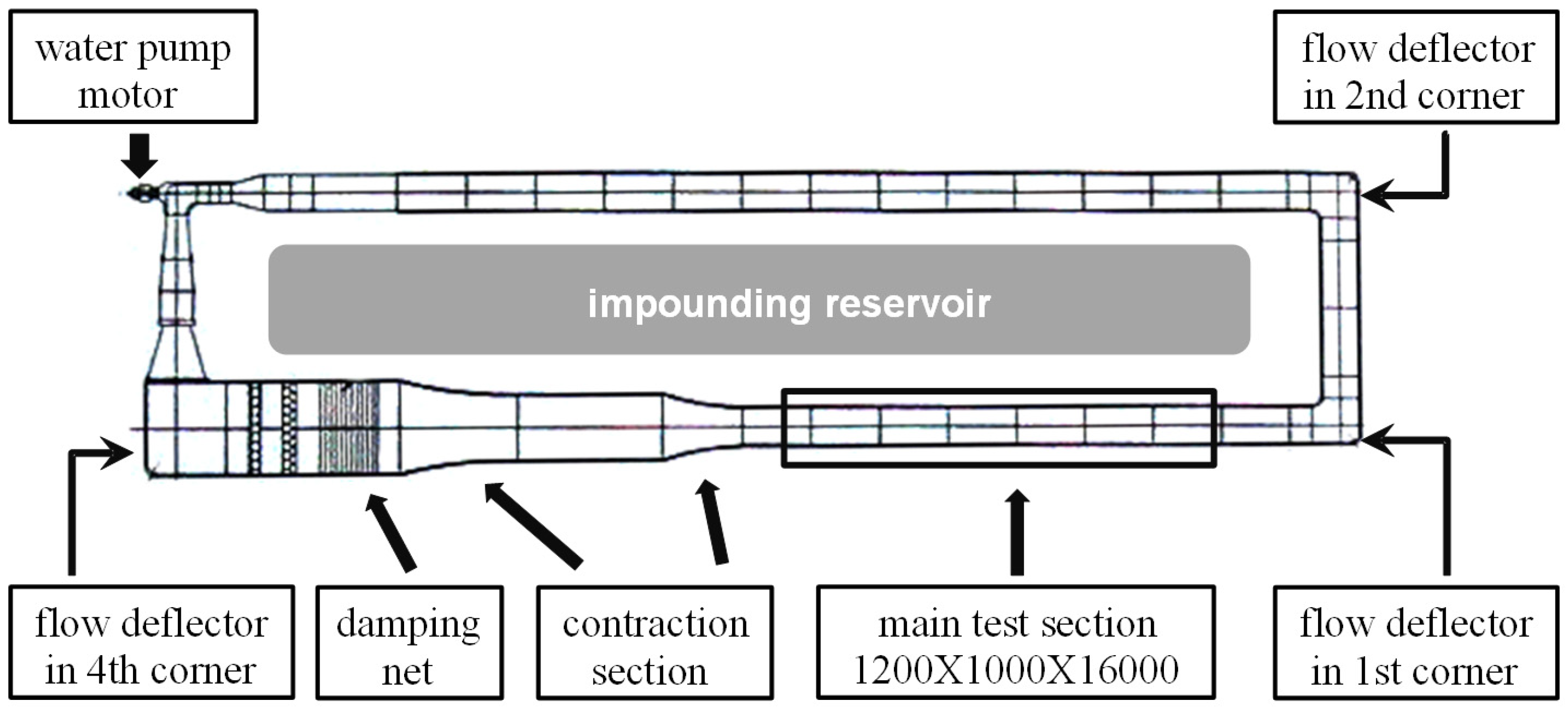
2.1. Water Tunnel and Rotor System
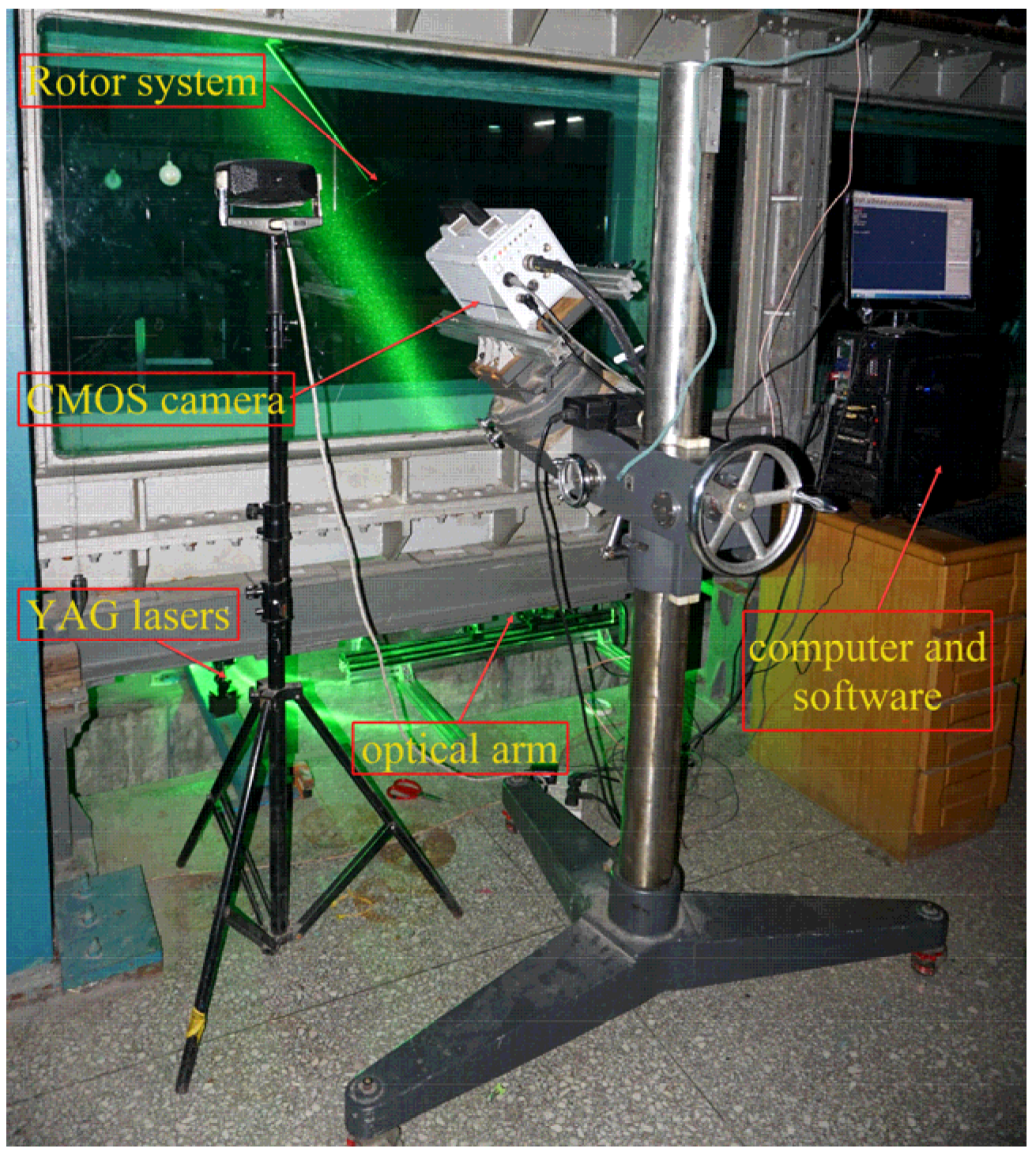
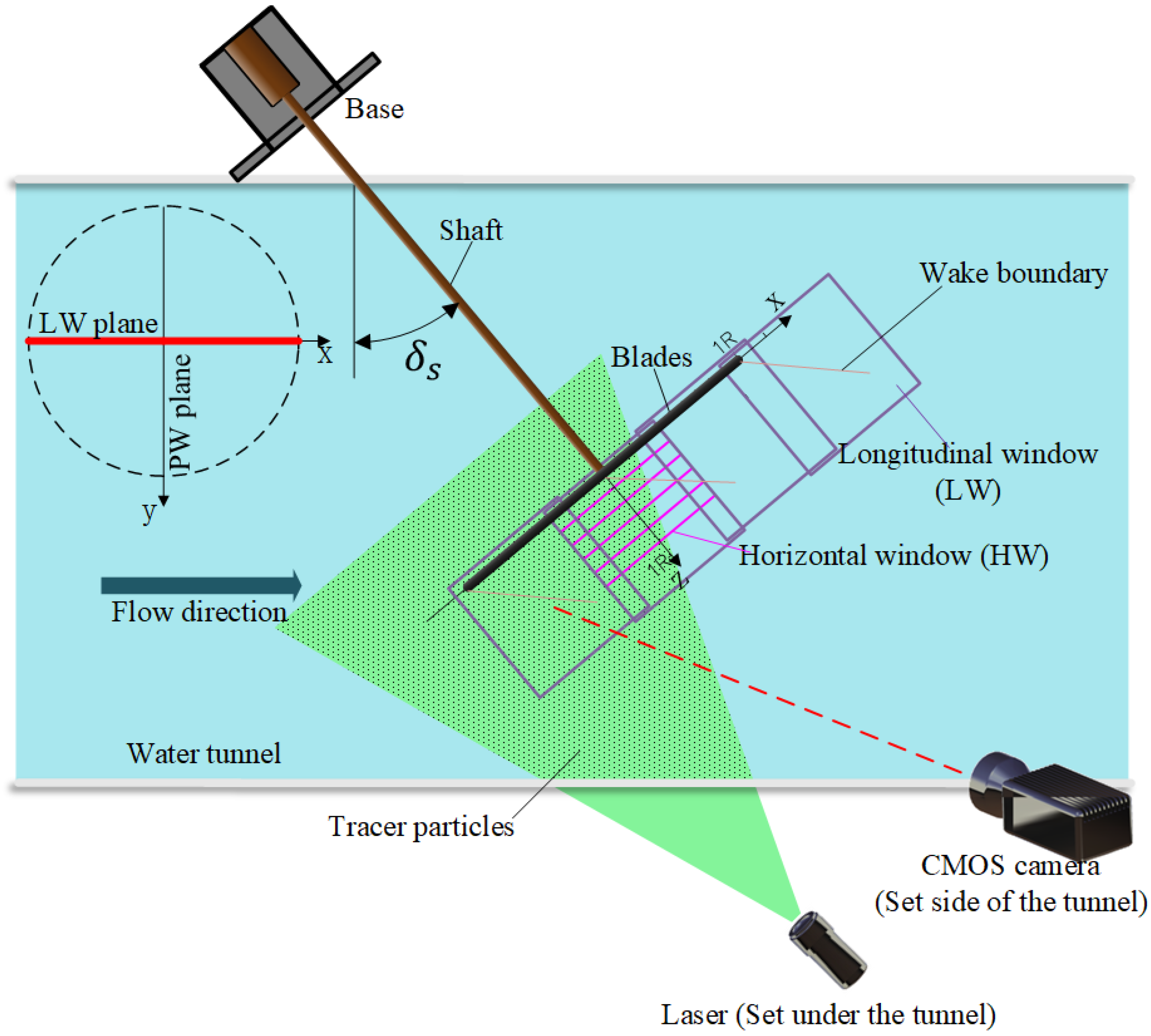
2.2. PIV Instrumentations
3. CFD Simulation Method
3.1. Governing Equation and Solution Method
3.2. Turbulence Model
3.3. Boundary Condition
3.4. Dynamic Equation
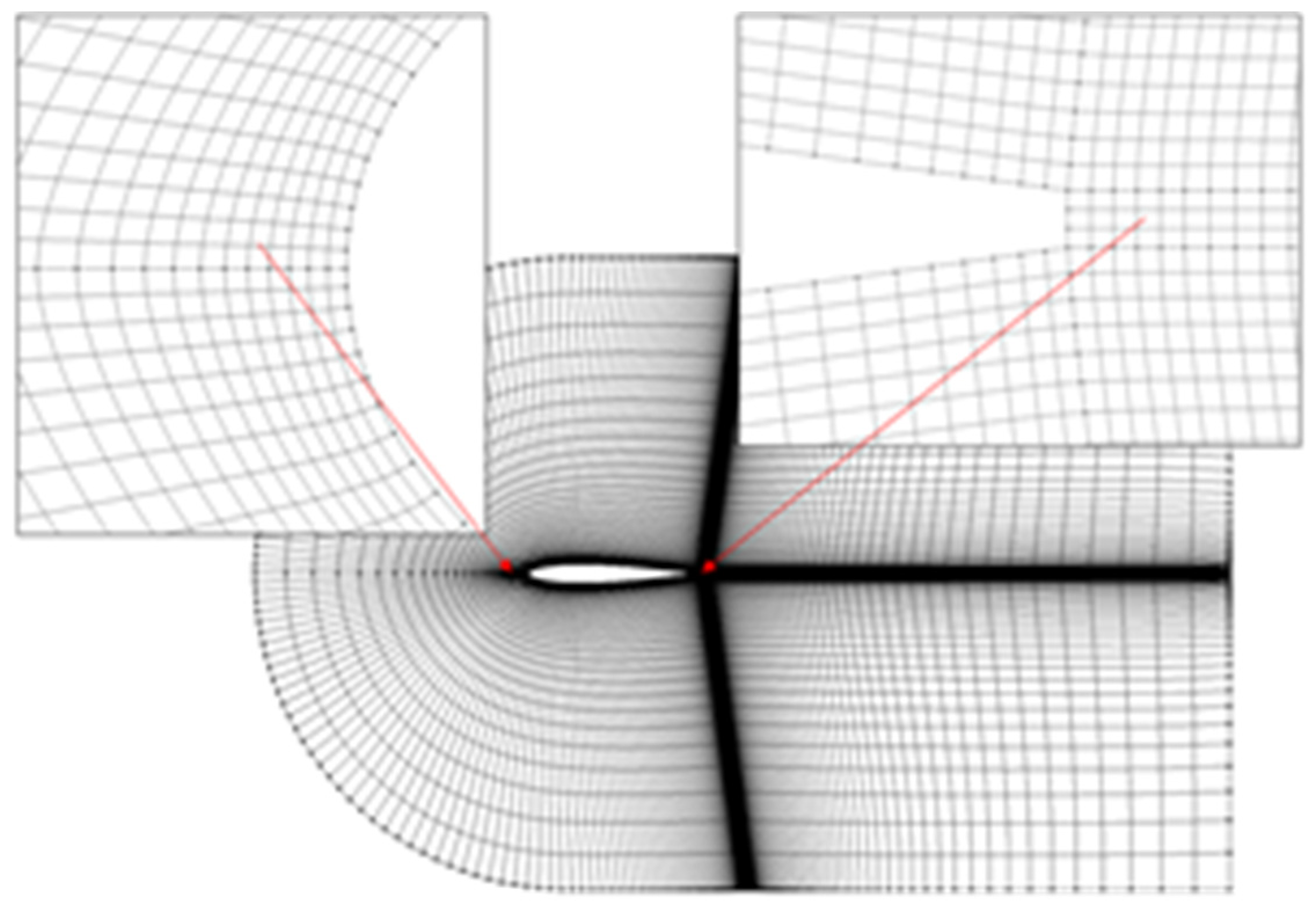
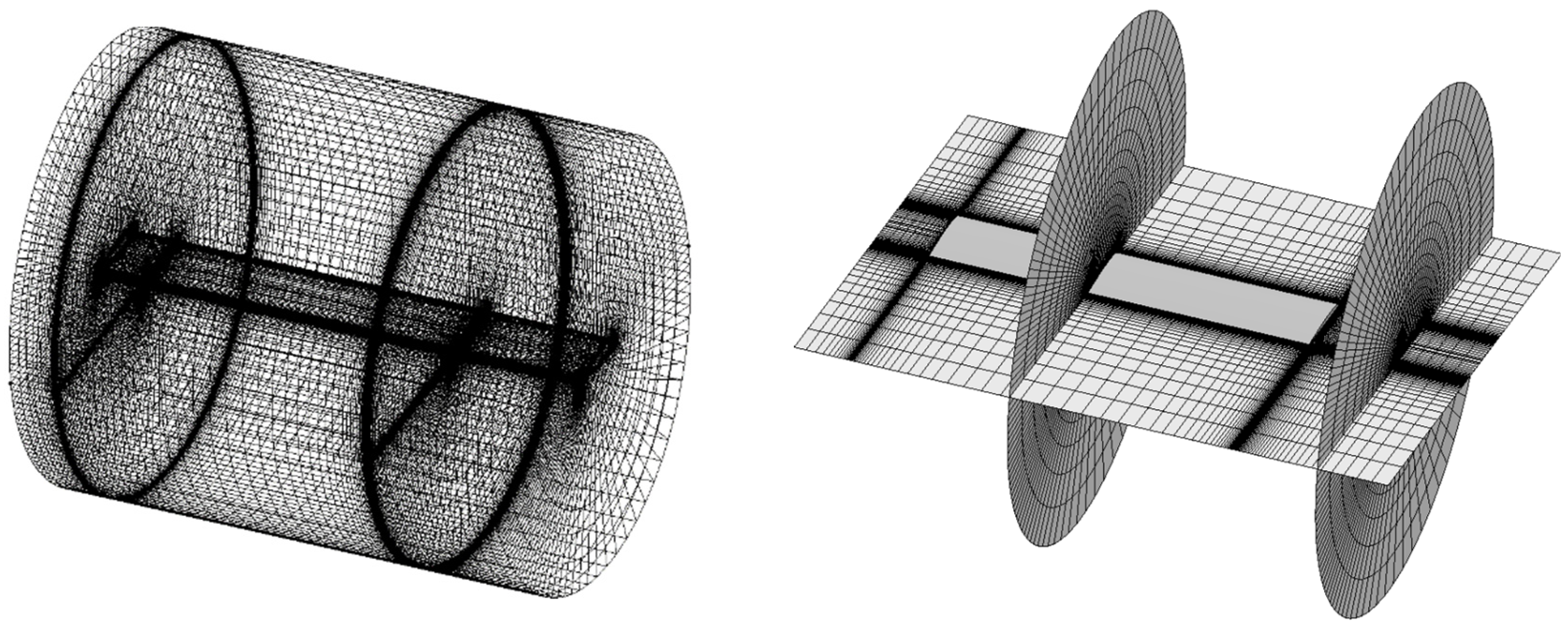
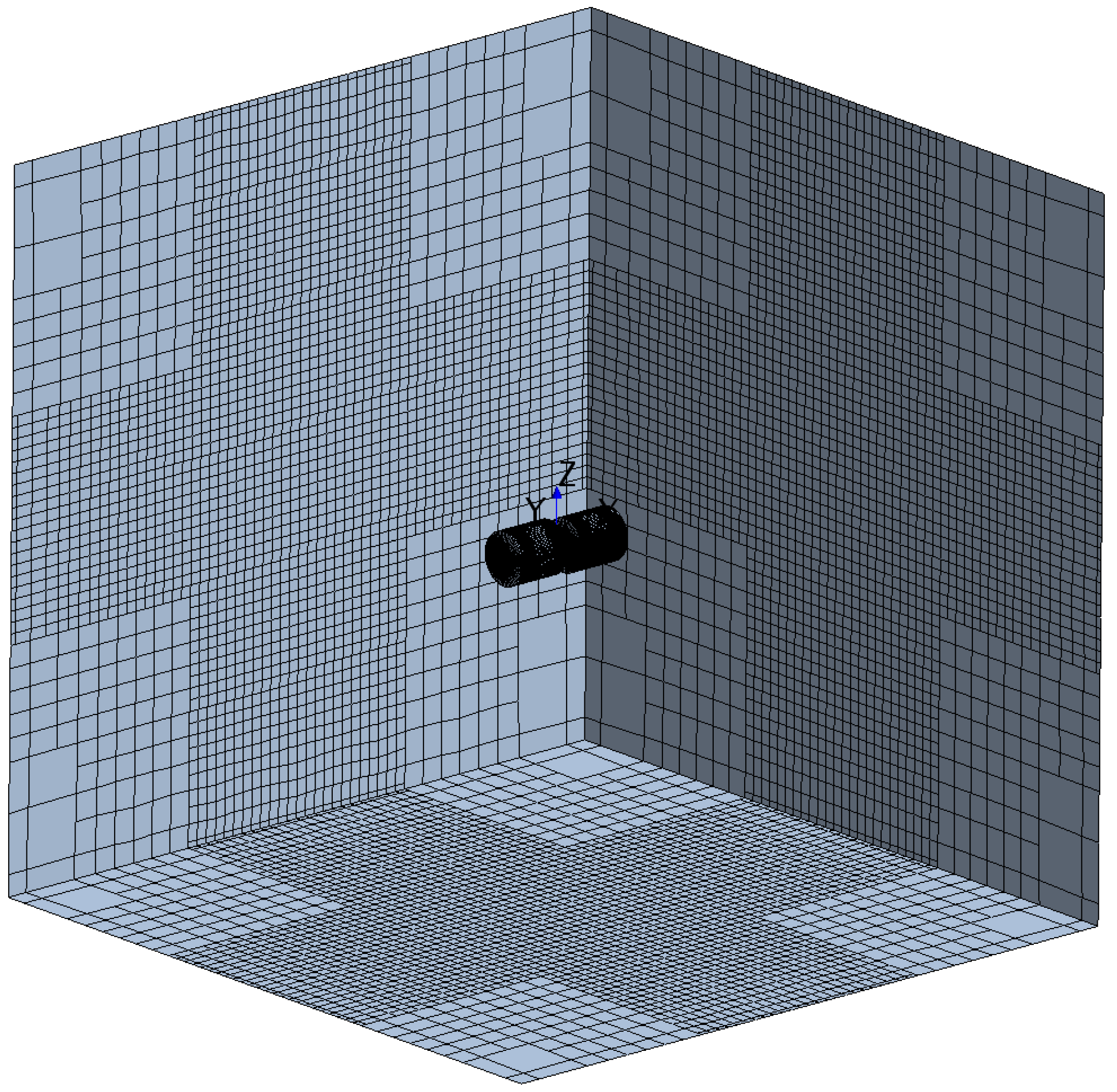
4. Grid System
5. Results and Discussion
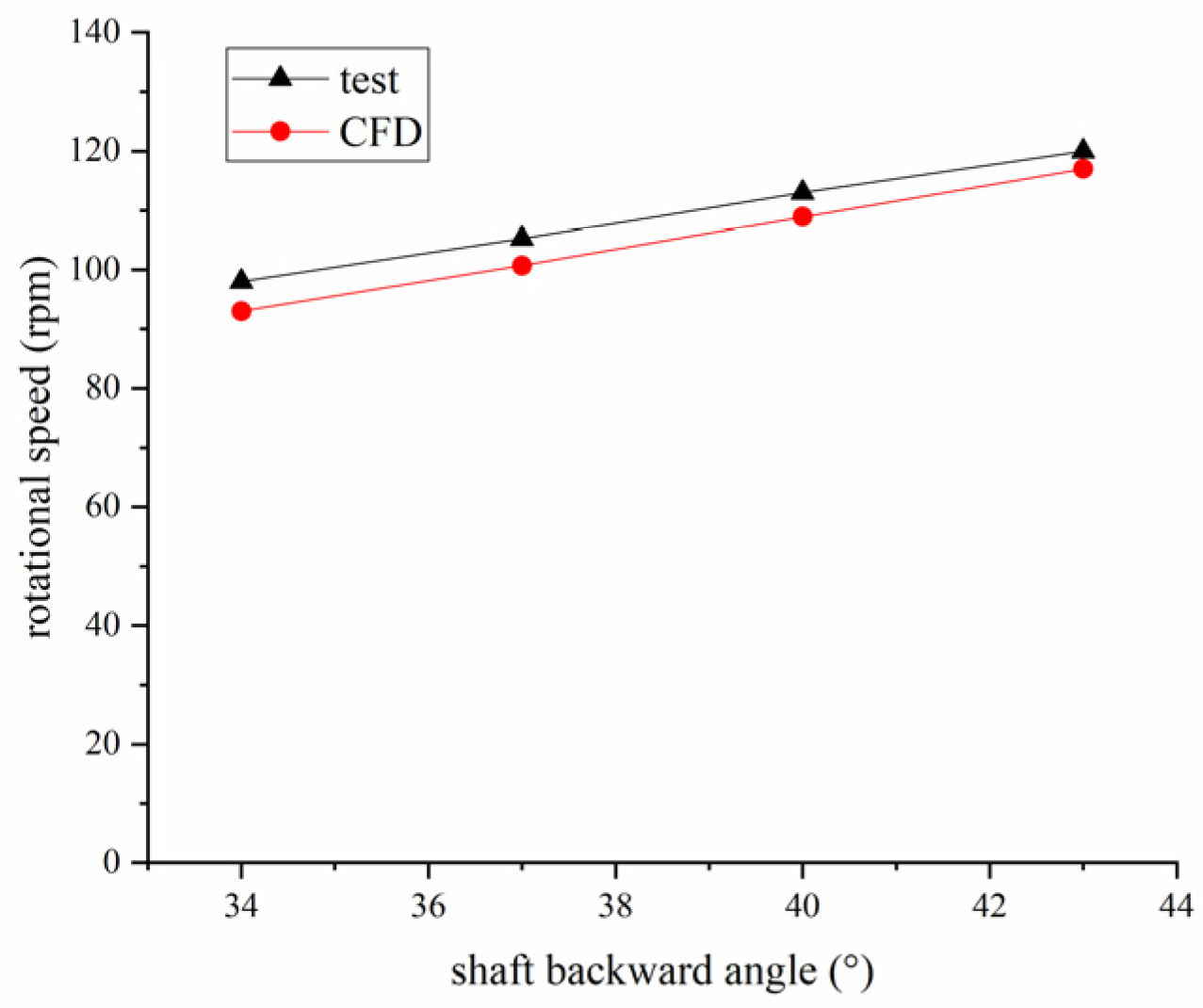
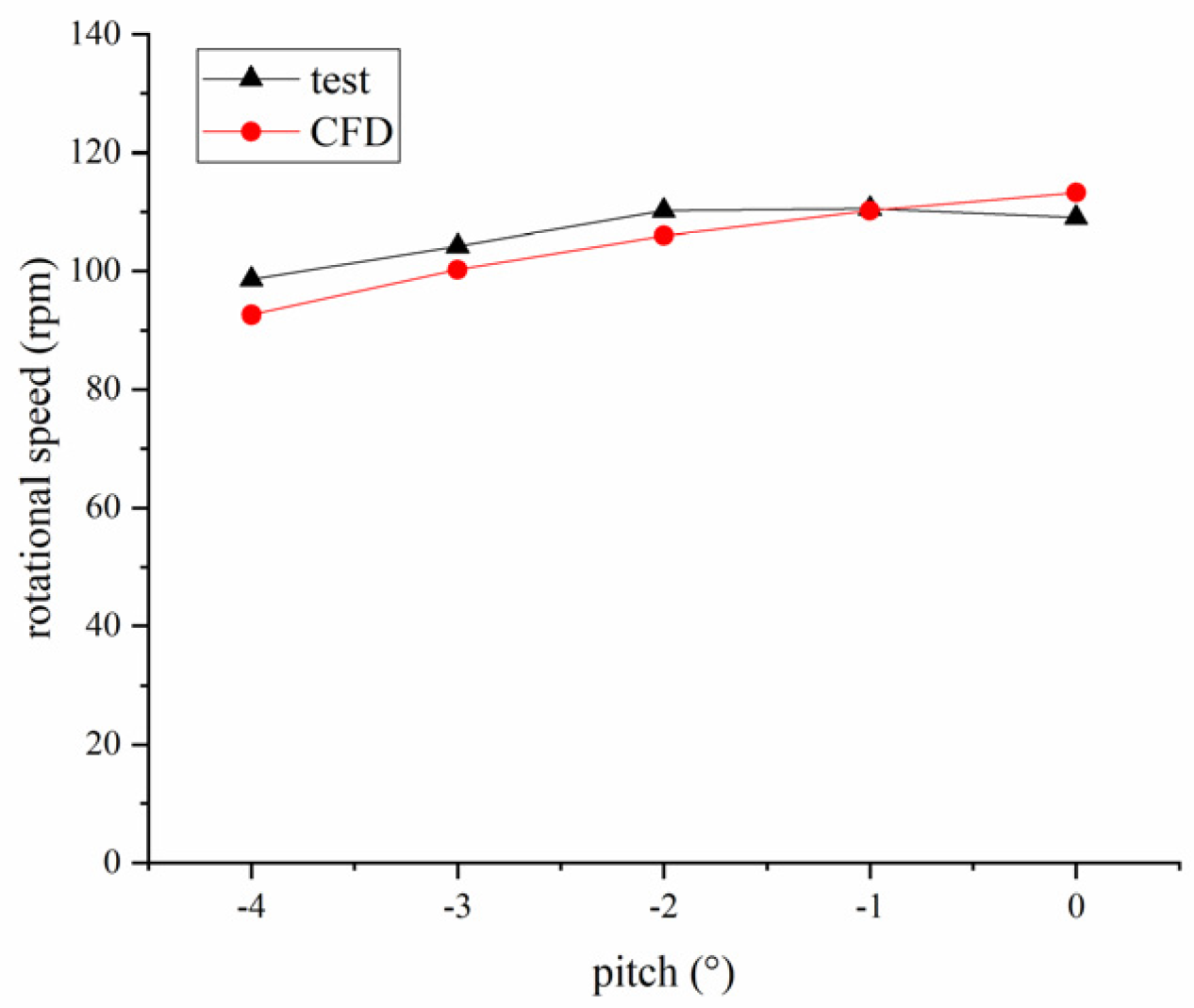
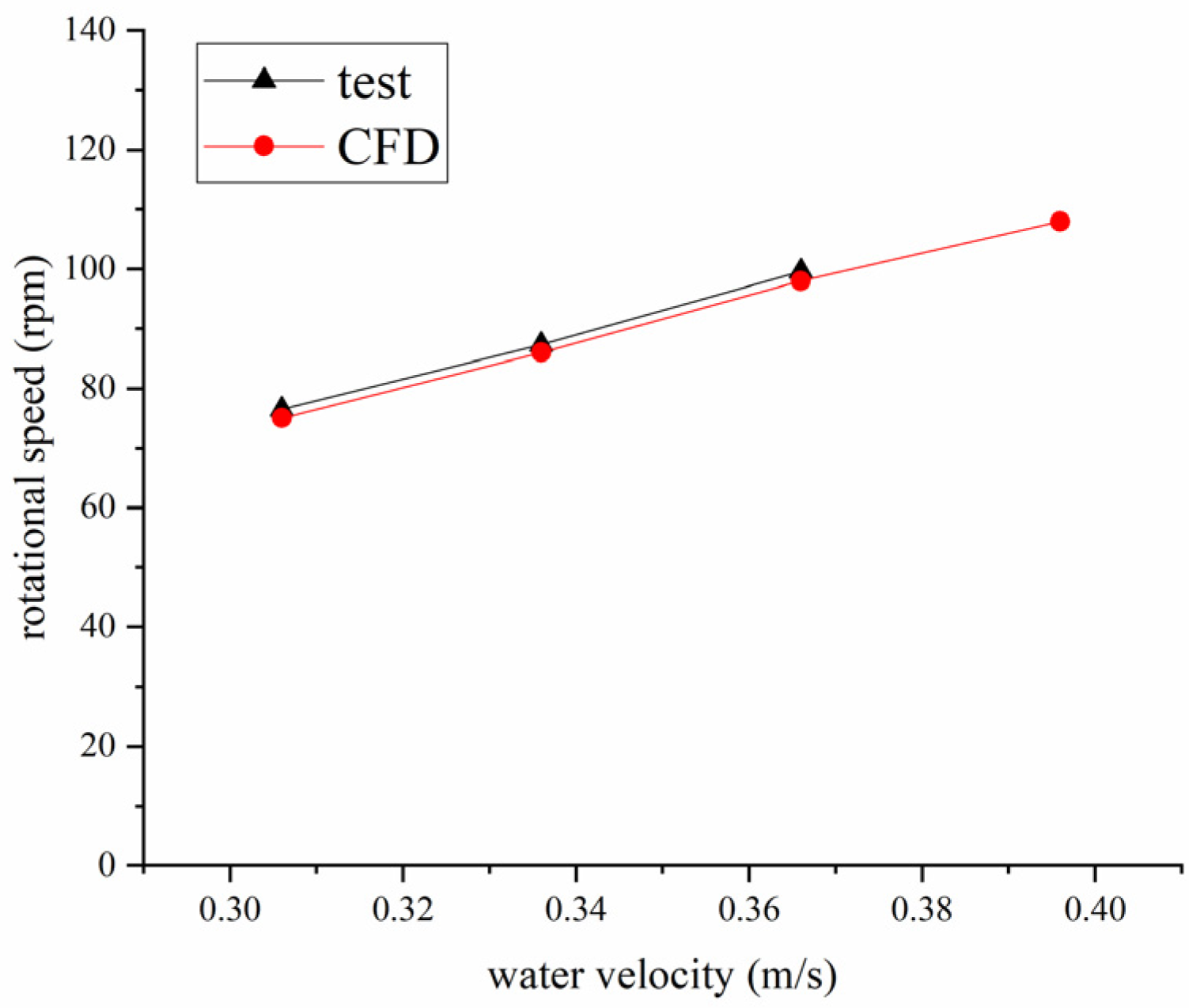
5.1. Rotational Speed
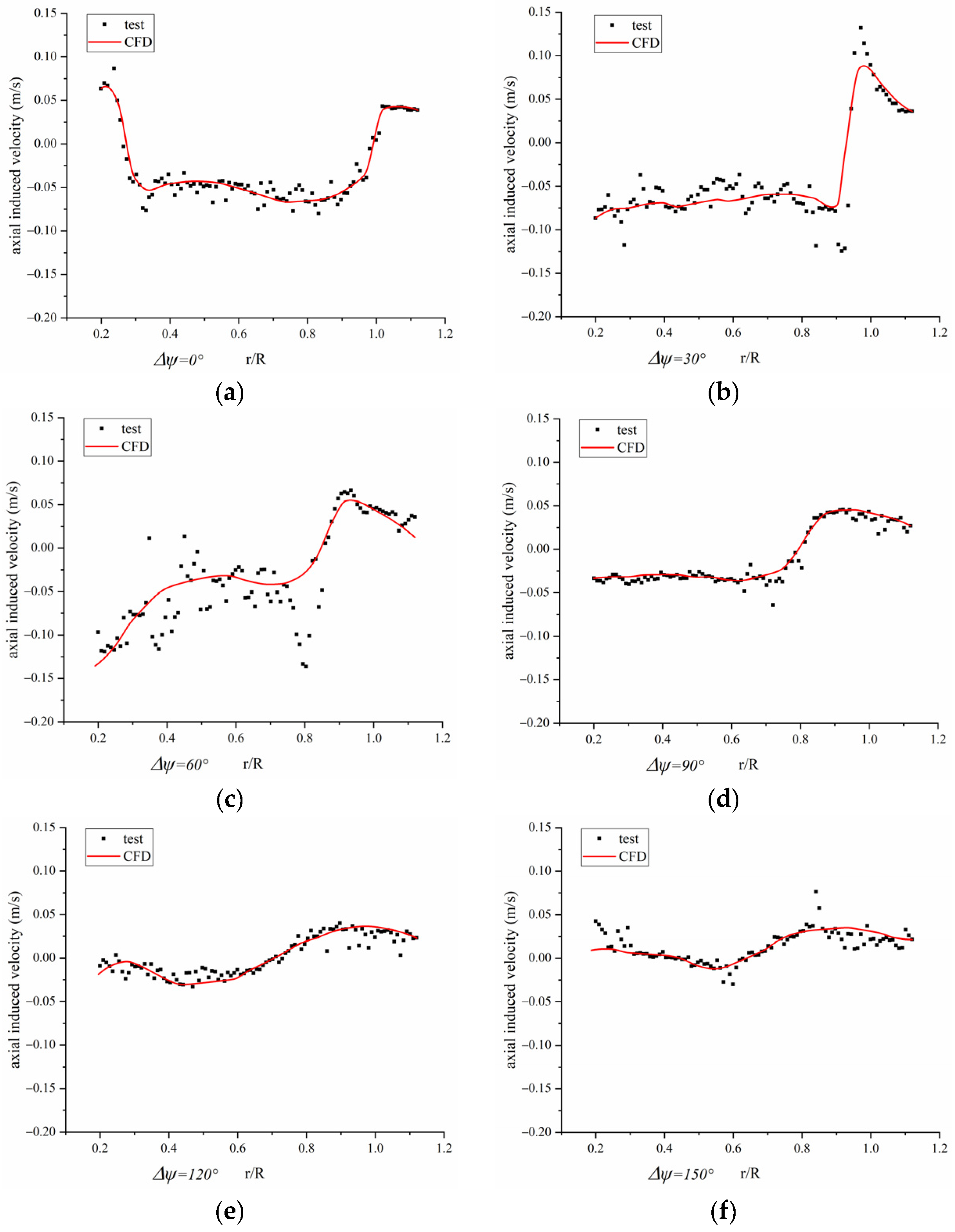
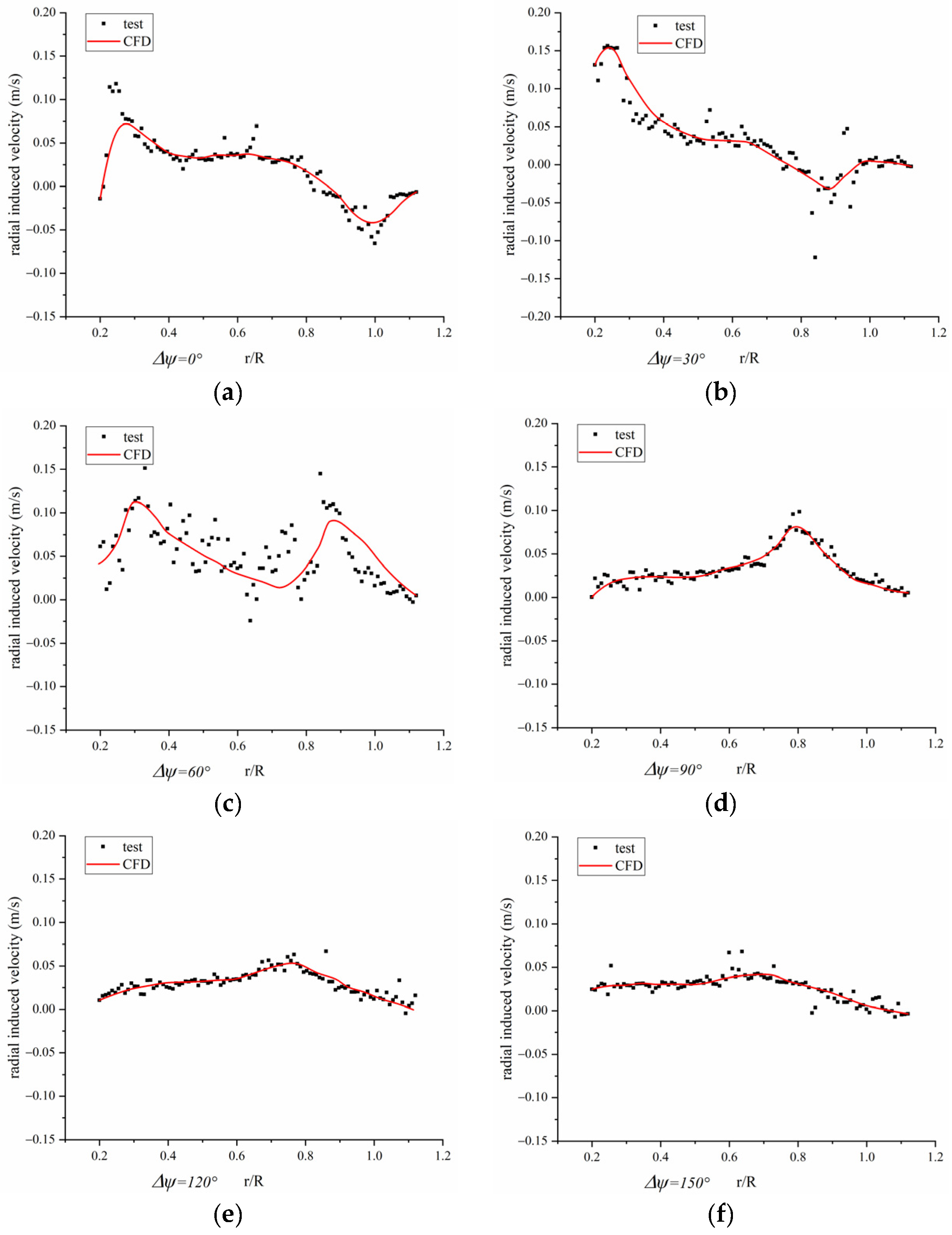
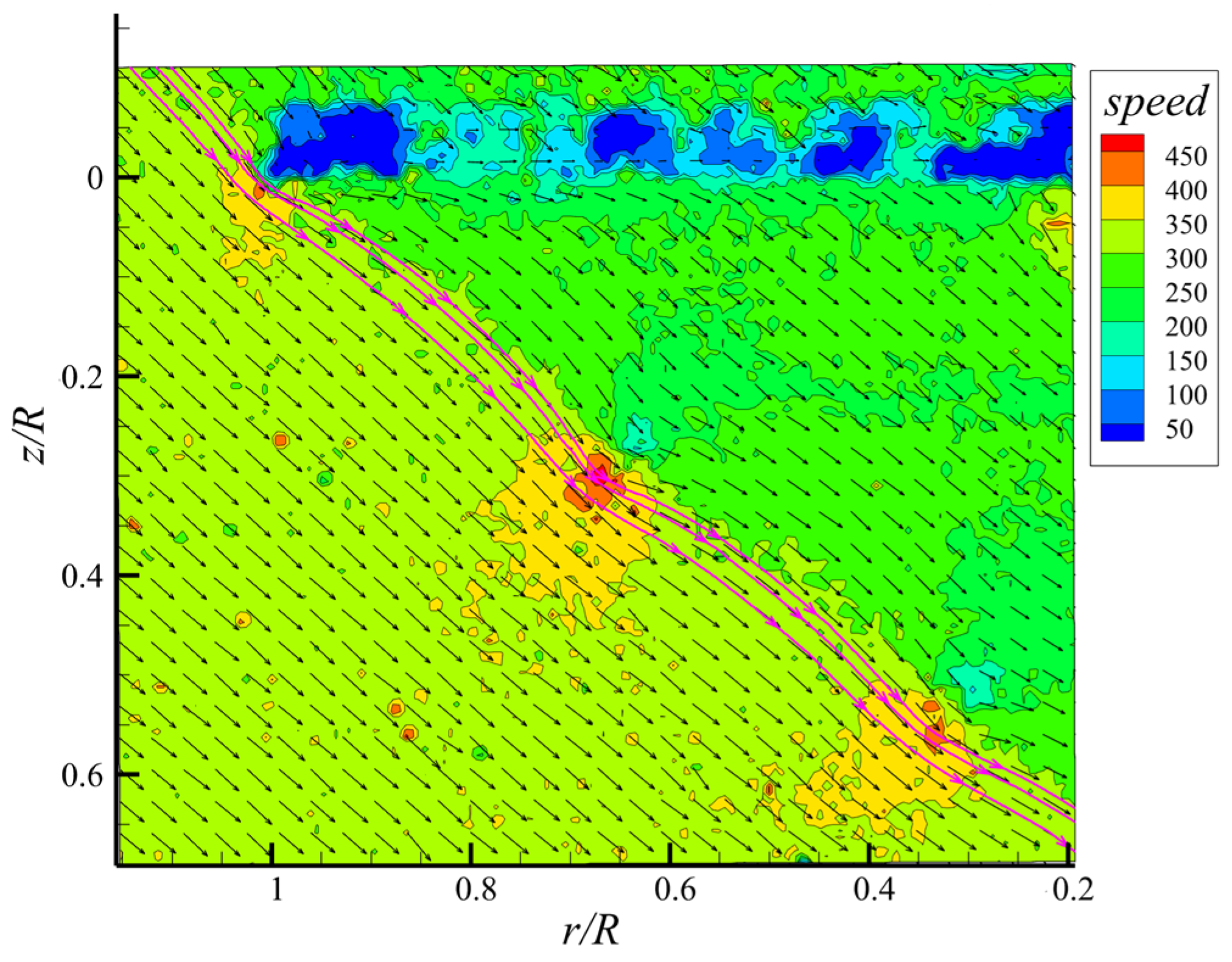
5.2. Induced Velocity
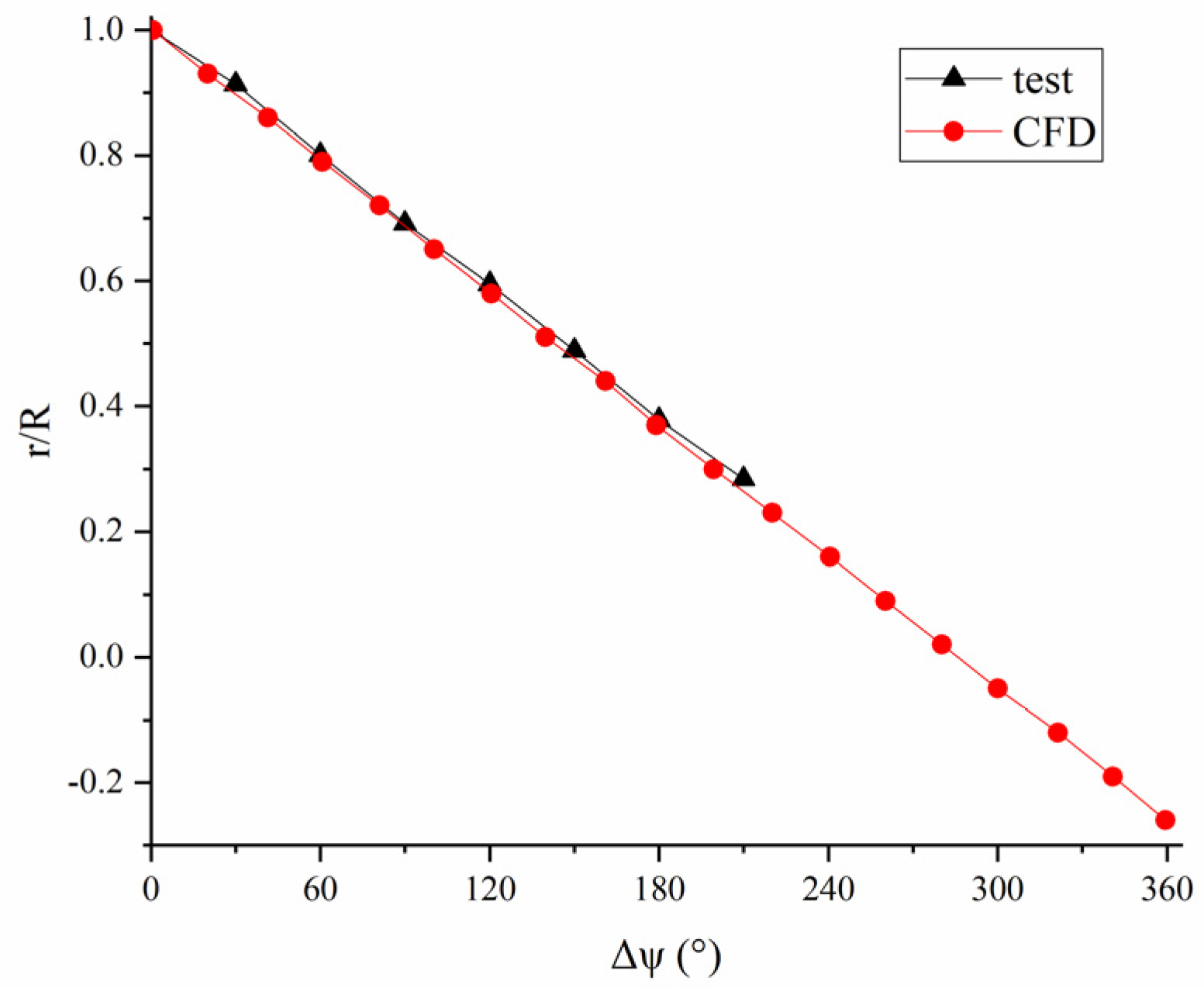
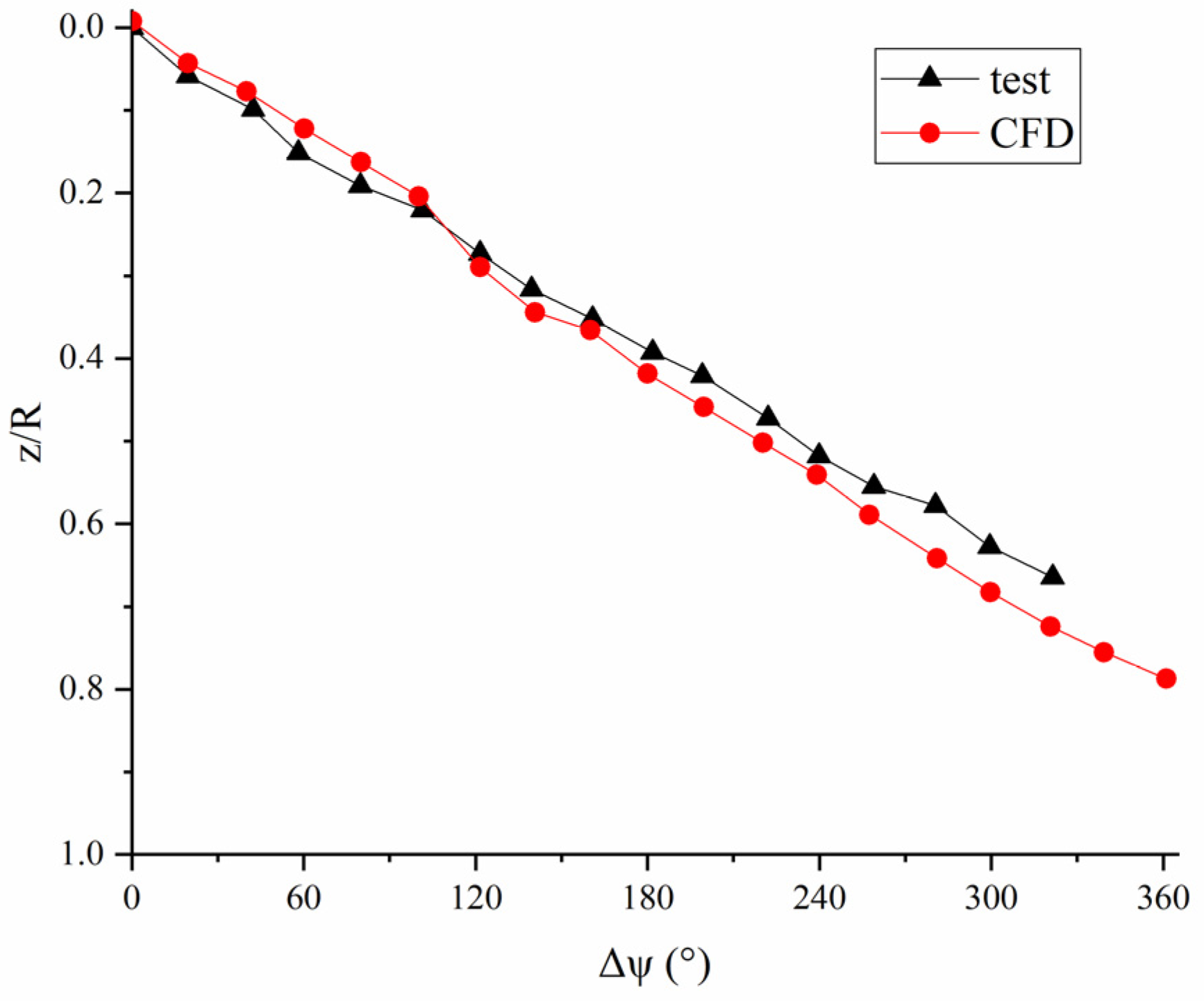
5.3. Tip Vortex Trajectory
5.4. Thrust and Thrust Coefficient
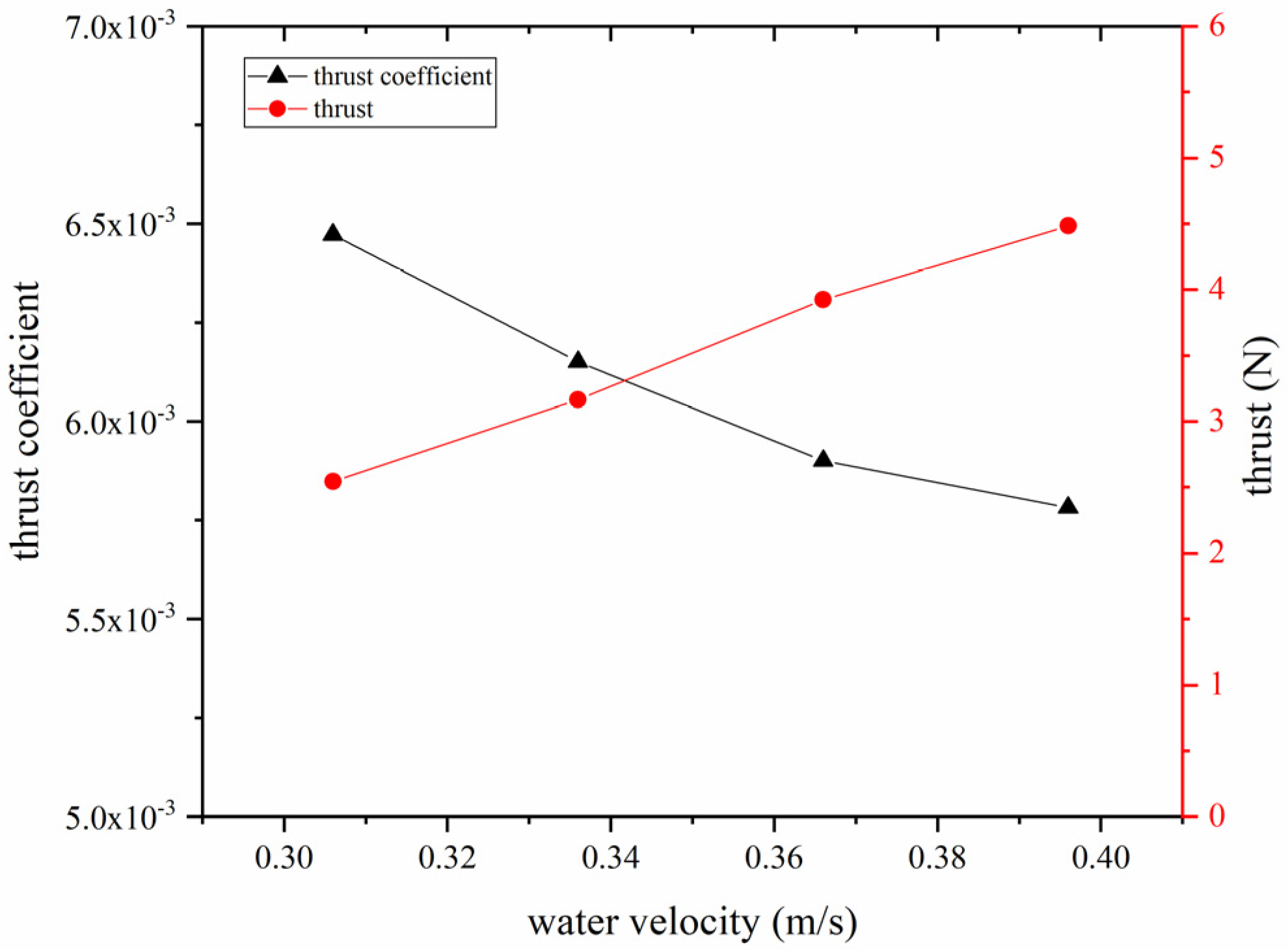
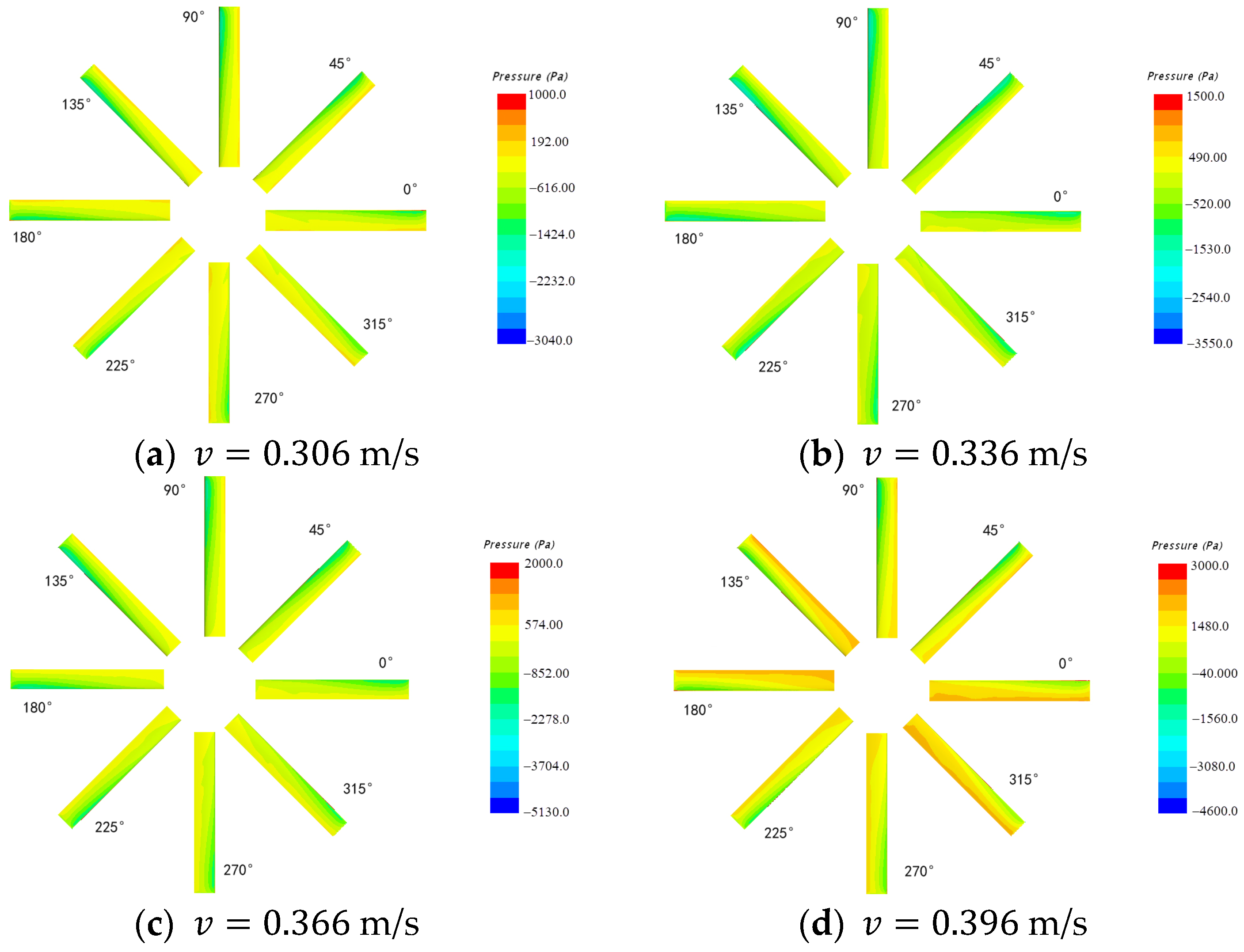
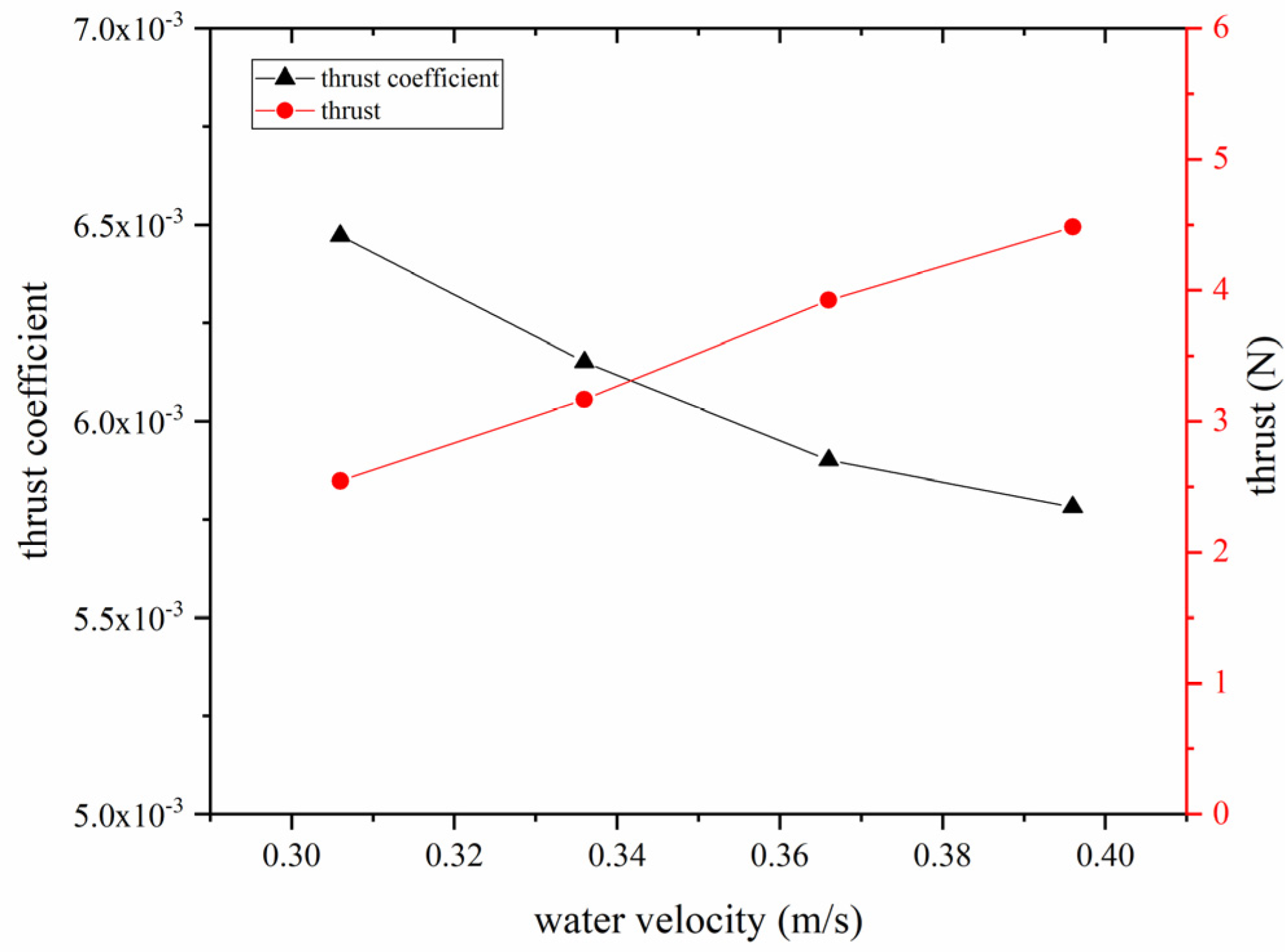
5.4.1. Water Velocity
5.4.2. Shaft Backward Angle
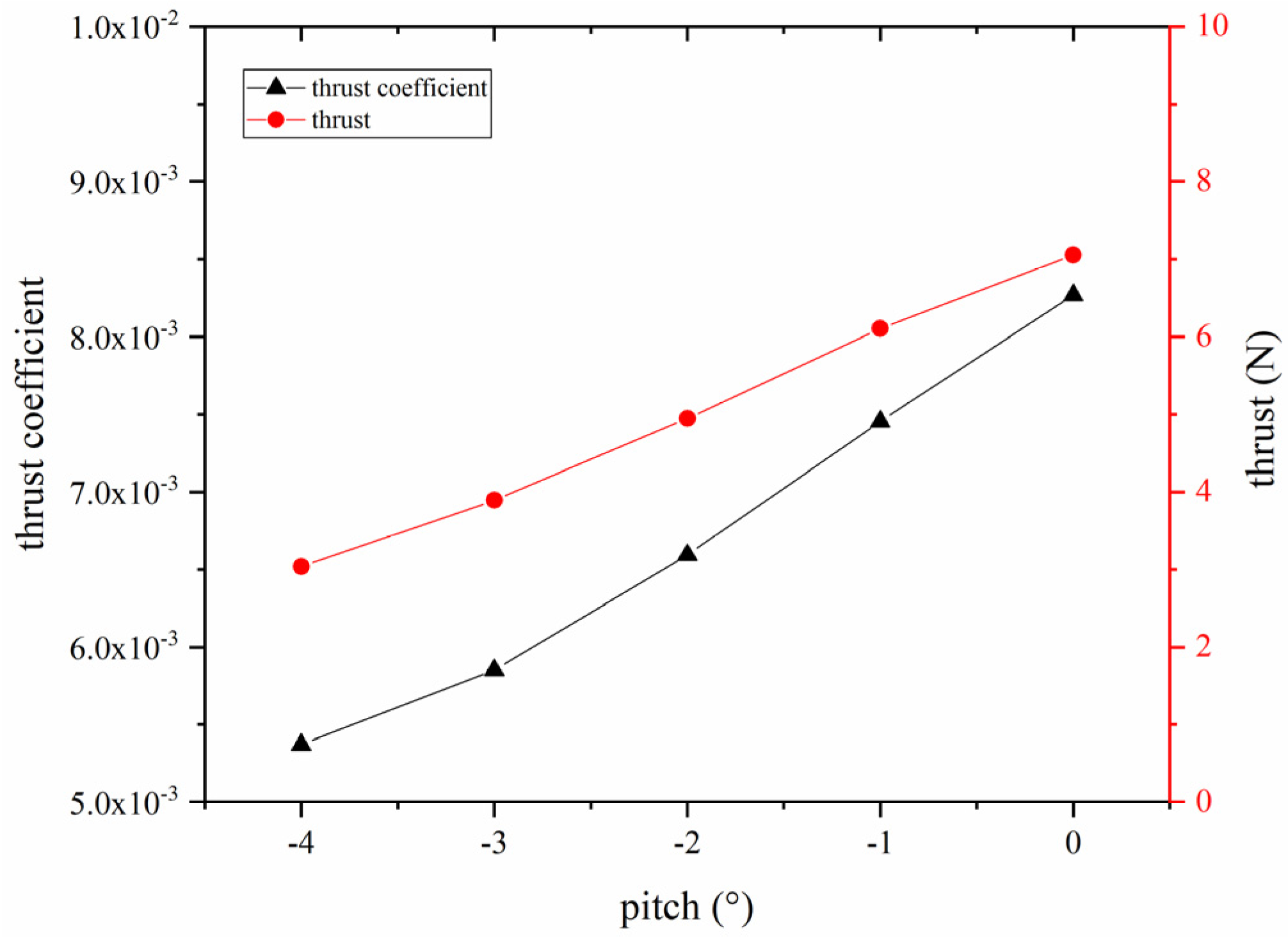
5.4.3. Blade Pitch
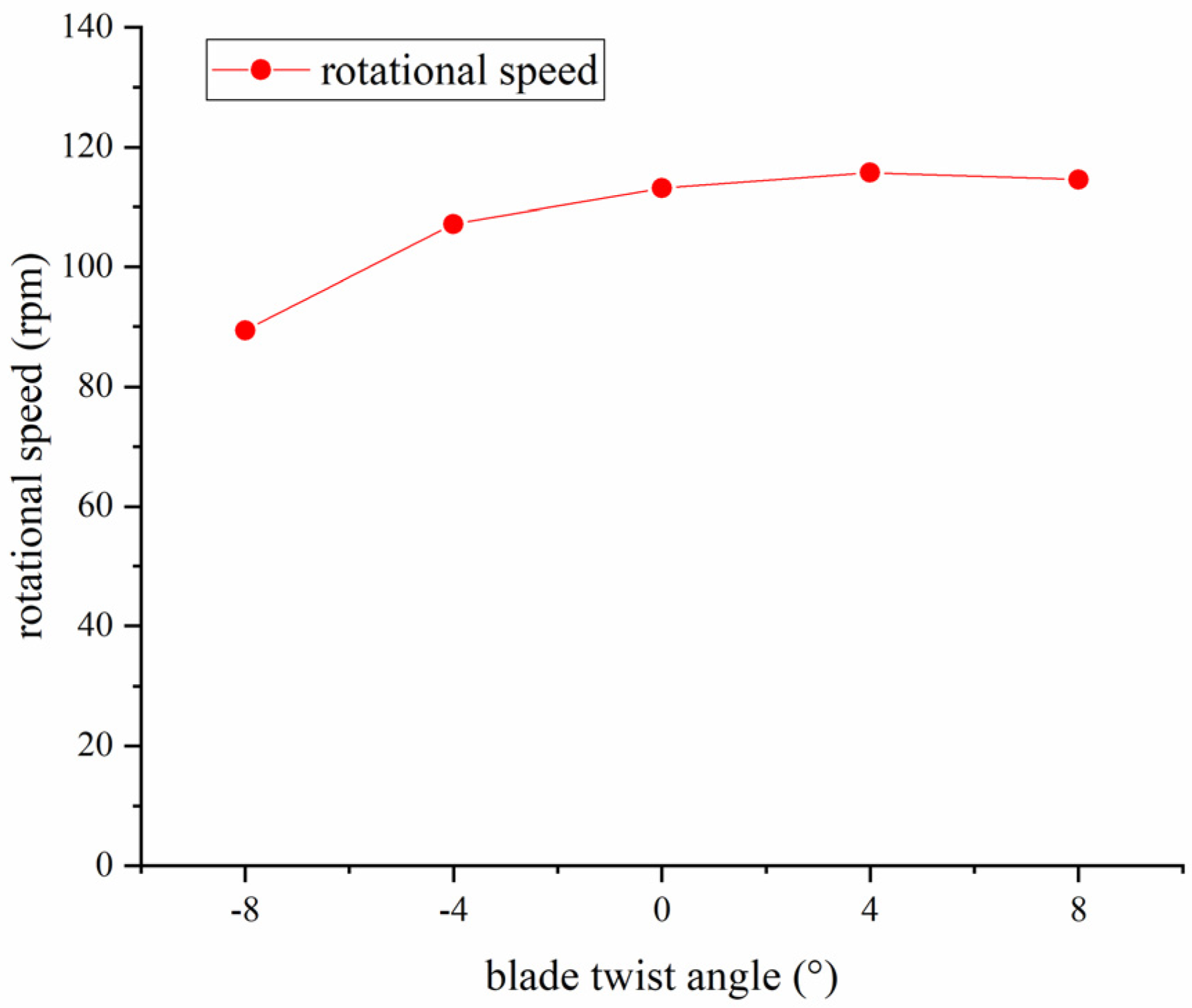
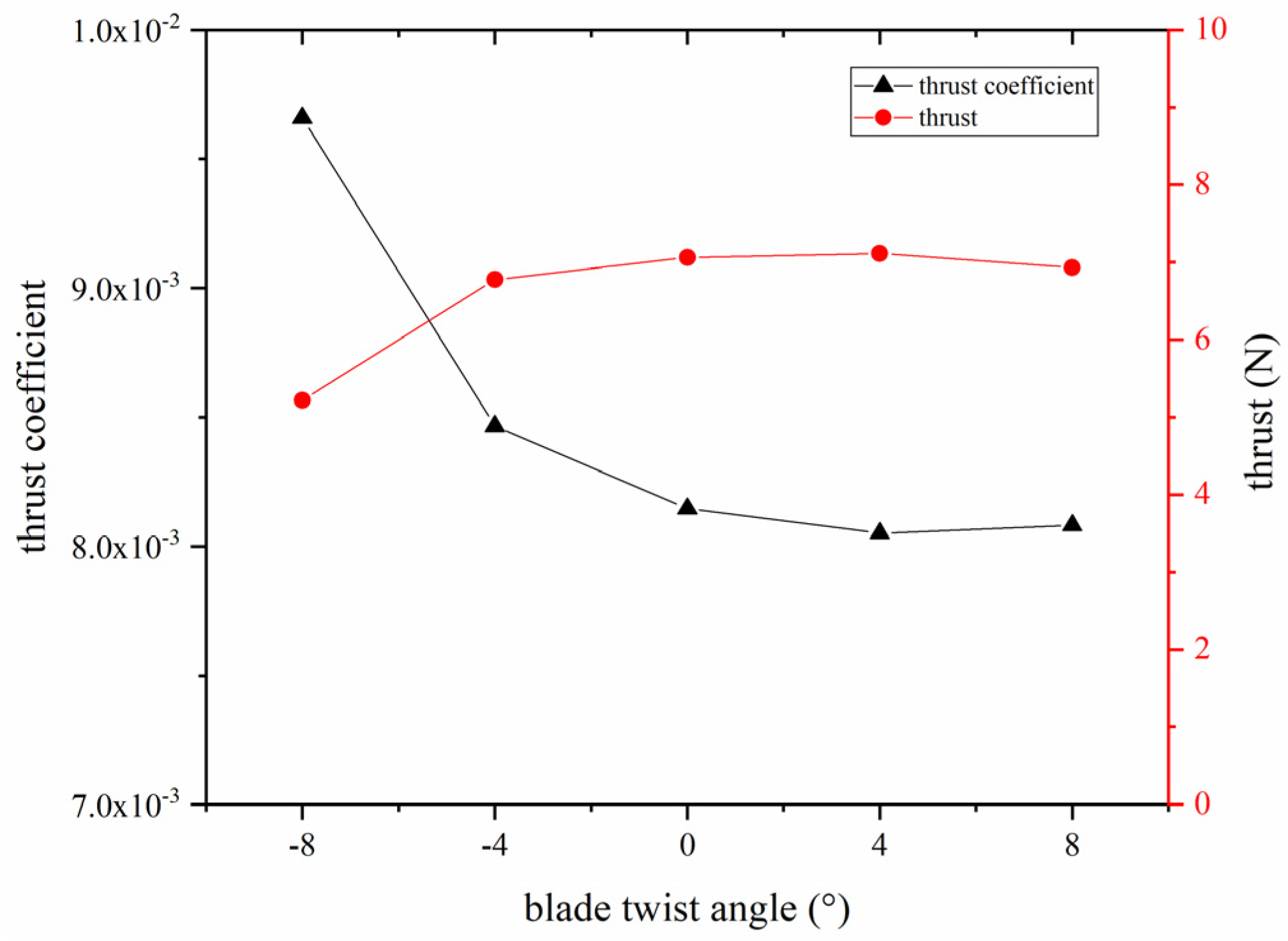
5.4.4. Blade Twist Angle
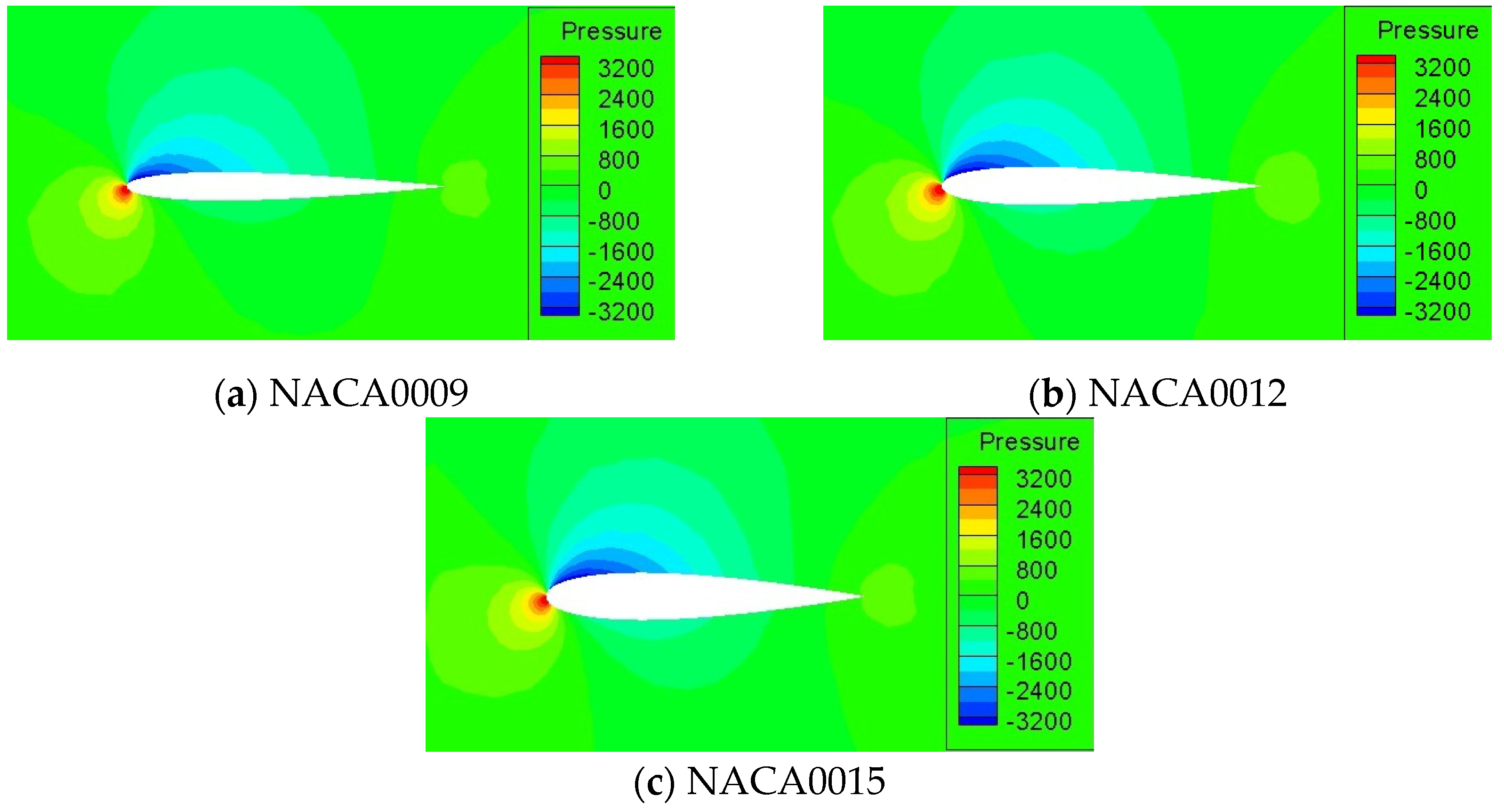
5.4.5. Blade Airfoil
5.4.6. Number of Blades
6. Conclusions
- The experimental results show that the rotational speed has a significant positive correlation with the water velocity and shaft backward angle, but the relationship with the pitch is first increasing and then decreasing. The axial-induced velocity is around 0.05 m/s. The induced velocity fluctuates sharply around the blade tip and rapidly drops to zero outside the blade tip. The dramatic variations are due to the effect of the water velocity and the blade tip vortices. The radial and axial displacements of blade tip vortex trajectories are clearly linear with respect to time.
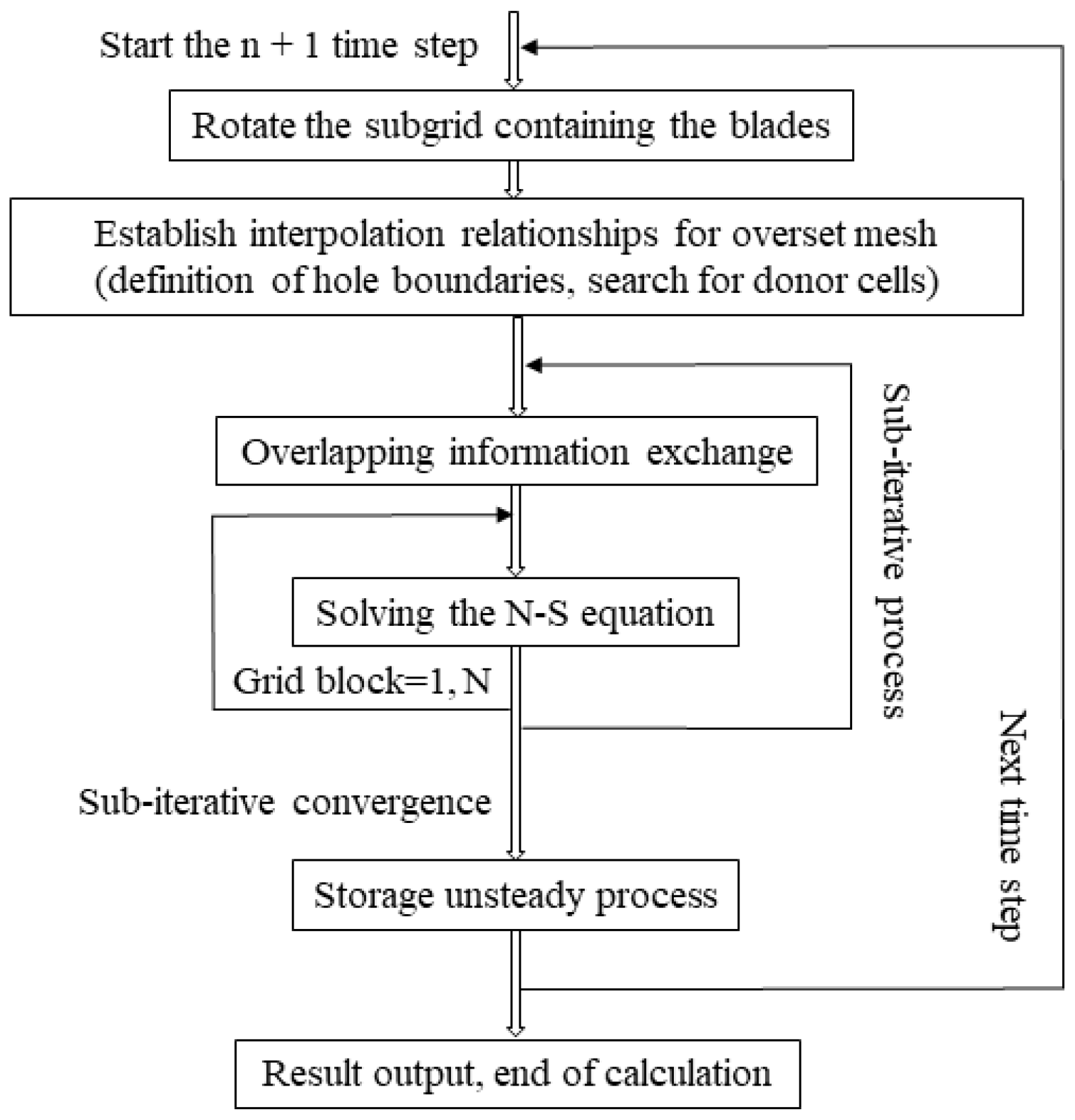
- A computational fluid dynamic (CFD) based on moving overset grids was developed to study the hydrodynamic characteristics of the underwater autorotating rotor. In this simulation, the Navier–Stokes equations were solved using the overset grids technique to calculate the flow field of the underwater autorotating rotor under various states. The experimental results demonstrate that CFD simulation method is suitable for investigating the hydrodynamic characteristics of underwater autorotating rotors. Induced velocity verifies the accuracy of the simulated velocity flow field. The position of the blade tip vortex trajectory confirms the accuracy of the simulated blade tip complex flow field.
- The thrust has a linear positive correlation with water velocity, but the thrust coefficient has a linear negative correlation with water velocity. When the water speed exceeds a certain value, waterflow separation occurs on the blade upper surface resulting in the emergence of a stall region at blade tip, which causes the thrust coefficient to drop rapidly.
- The thrust is linearly related to the shaft backward angle, but the thrust coefficient is almost a fixed value with δs. However, an excessively large shaft backward angle increases drag in the forward direction, so it is essential to select a properly angled shaft back. The thrust and thrust coefficient are linearly and positively correlated with the blade pitch as the blade pitch increases from a negative value to zero.
- As the blade twist angle changes from negative to positive, the thrust first increases and then tends to stable, in contrast to the decrease in the thrust coefficient. Therefore, a suitable negative blade torsion is more advantageous for underwater autorotating rotors. However, the excessive positive twist of the blade can lead to a decrease in thrust and an increase in thrust coefficient. For symmetrical airfoils, within a certain range, as the airfoil thickness increases, the rotational speed, and thrust decrease, but the thrust coefficient increases. Appropriately thin airfoils are more beneficial for underwater autorotating rotors. An increase in the number of blades increases thrust and thrust coefficient but reduces rotational speed. The rotor will not rotate when the number of blades reaches a specific value. When the rotor can be rotated, the number of blades can be increased appropriately to improve the performance of underwater autorotating rotors.
- All our preliminary results throw light on the fundamental characteristics of underwater autorotating rotors. A limitation of this study is that the blade deformation is not considered in the CFD simulations. Further research should be carried out on multiple blades to enrich the theory of underwater autorotating rotors.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Song, L.; Zhang, H.; Liu, Y.; Wang, Y.; Yang, Y. Research on negative-buoyancy autorotating-rotor autonomous underwater vehicles. Appl. Ocean Res. 2020, 99, 102123. [Google Scholar] [CrossRef]
- Panda, J.P.; Mitra, A.; Warrior, H.V. A review on the hydrodynamic characteristics of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2021, 235, 15–29. [Google Scholar] [CrossRef]
- Wang, Z.K.; Liu, X.; Huang, H.C.; Chen, Y. Development of an autonomous underwater helicopter with high maneuverability. Appl. Sci. 2019, 9, 4072. [Google Scholar] [CrossRef] [Green Version]
- Petritoli, E.; Leccese, F. Unmanned autogyro for mars exploration: A preliminary study. Drones 2021, 5, 53. [Google Scholar] [CrossRef]
- Sharma, M.; Gupta, A.; Gupta, S.K.; Alsamhi, S.H.; Shvetsov, A.V. Survey on unmanned aerial vehicle for mars exploration: Deployment use case. Drones 2022, 6, 4. [Google Scholar] [CrossRef]
- De la Cierva, J. New developments of the autogiro. Aeronaut. J. 1935, 39, 1125–1143. [Google Scholar] [CrossRef]
- Tokaty, G.A. A History and Philosophy of Fluid Mechanics; Courier Corporation: Chelmsford, MA, USA, 1994. [Google Scholar]
- Leishman, J.G. Principles of Helicopter Aerodynamics, 2nd ed.; Cambridge University Press: New York, NY, USA, 2006. [Google Scholar]
- Leishman, J.G. Development of the autogiro: A technical perspective. J. Aircr. 2004, 41, 765–781. [Google Scholar] [CrossRef]
- Glauert, H. A General Theory of the Autogyro; HM Stationery Office: Richmond, UK, 1926. [Google Scholar]
- Wheatley, J.B. Lift and Drag Characteristics and Gliding Performance of an Autogiro as Determined in Flight; NACA-TR-434; National Advisory Committee for Aeronautics: Washington, DC, USA, 1933.
- Wheatley, J.B. The Aerodynamic Analysis of the Gyroplane Rotating-Wing System; NACA-TN-492; National Advisory Committee for Aeronautics: Washington, DC, USA, 1934.
- Wheatley, J.B. A Study of Autogiro Rotor-Blade Oscillations in the Plane of the Rotor Disk; NACA-TN-581; National Advisory Committee for Aeronautics: Washington, DC, USA, 1936.
- Wheatley, J.B. An Analysis of the Factors that Determine the Periodic Twist of an Autogiro Rotor Blade, with a Comparison of Predicted and Measured Results; NACA-TR-600; National Advisory Committee for Aeronautics: Washington, DC, USA, 1937.
- Wheatley, J.B. An Analytical and Experimental Study of the Effect of Periodic Blade Twist on the Thrust, Torque, and Flapping Motion of an Autogiro Rotor; NACA-TR-591; US Government Printing Office: Washington, DC, USA, 1937.
- Wheatley, J.B.; Bioletti, C. Analysis and Model Tests of Autogiro Jump Take-Off; NACA-TN-582; National Advisory Committee for Aeronautics: Washington, DC, USA, 1936.
- Wheatley, J.B.; Bioletti, C. Wind-tunnel, tests of 10-foot-diameter auto giro rotors. In Annual Report-National Advisory Committee for Aeronautics; United States Government Publishing Office: Washington, DC, USA, 1937; p. 199. [Google Scholar]
- Houston, S. Identification of autogyro longitudinal stability and control characteristics. J. Guid. Control Dyn. 1998, 21, 391–399. [Google Scholar] [CrossRef]
- Houston, S. Validation of a rotorcraft mathematical model for autogyro simulation. J. Aircr. 2000, 37, 403–409. [Google Scholar] [CrossRef]
- Houston, S. Analysis of rotorcraft flight dynamics in autorotation. J. Aircr. 2002, 25, 33–39. [Google Scholar] [CrossRef]
- Houston, S. Modeling and analysis of helicopter flight mechanics in autorotation. J. Aircr. 2003, 40, 675–682. [Google Scholar] [CrossRef]
- Houston, S.; Brown, R. Rotor-wake modeling for simulation of helicopter flight mechanics in autorotation. J. Aircr. 2003, 40, 938–945. [Google Scholar] [CrossRef]
- Thomson, D.; Houston, S. Application of parameter estimation to improved autogyro simulation model fidelity. J. Aircr. 2005, 42, 33–40. [Google Scholar] [CrossRef]
- Bagiev, M.; Thomson, D.G.; Houston, S. Autogyro handling qualities assessment. In Proceedings of the 60th American Helicopter Society Annual Forum, Baltimore, MD, USA, 7–10 June 2004. [Google Scholar]
- Bagiev, M.; Thomson, D.G. Handling qualities evaluation of an autogiro against the existing rotorcraft criteria. J. Aircr. 2009, 46, 168–174. [Google Scholar] [CrossRef]
- Bagiev, M.; Thomson, D.G. Handling qualities assessment of an autogiro. J. Am. Helicopter Soc. 2010, 55, 32003. [Google Scholar] [CrossRef]
- Eriksen, C.C.; Osse, T.J.; Light, R.D.; Wen, T.; Lehman, T.W.; Sabin, P.L.; Ballard, J.W.; Chiodi, A.M. Seaglider: A long-range autonomous underwater vehicle for oceanographic research. IEEE J. Ocean. Eng. 2001, 26, 424–436. [Google Scholar] [CrossRef] [Green Version]
- Webb, D.C.; Simonetti, P.J.; Jones, C.P. SLOCUM: An underwater glider propelled by environmental energy. IEEE J. Ocean. Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Li, X.; Zhao, M.; Zhao, F.; Yuan, Q.; Ge, T. Study on hydrodynamic performance of heavier-than-water AUV with overlapping grid method. Ocean Syst. Eng. 2014, 4, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Herrero, A.D.; Percin, M.; Karasek, M.; van Oudheusden, B. Flow visualization around a flapping-wing micro air vehicle in free flight using large-scale PIV. Aerospace 2018, 5, 99. [Google Scholar] [CrossRef] [Green Version]
- Yin, K.W.; Zhang, J.; Chen, S. Design of a high uniformity laser sheet optical system for particle image velocimetry. Aerospace 2021, 8, 393. [Google Scholar] [CrossRef]
- Deng, Y.-M. PIV measurement of water tunnel for the flow field of a hovering coaxial-rotor. J. Aerosp. Power 2007, 22, 1852–1857. [Google Scholar]
- Yu, S.; Deng, Y. PIV measurements in the wake of coaxial-rotor in water tunnel. J. Beijing Univ. Aeronaut. Astronaut. 2007, 33, 635–639. [Google Scholar]
- Zanotti, A. Experimental study of the aerodynamic interaction between side-by-side propellers in evtol airplane mode through stereoscopic particle image velocimetry. Aerospace 2021, 8, 239. [Google Scholar] [CrossRef]
- De Gregorio, F.; Pengel, K.; Kindler, K. A comprehensive PIV measurement campaign on a fully equipped helicopter model. Exp. Fluids 2012, 53, 37–49. [Google Scholar] [CrossRef]
- Ma, Y.; Chen, M.; Zhang, X.; Wang, Q. Scale-model tests of coaxial rotors in water tunnel via particle image velocimetry technique. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 426–443. [Google Scholar] [CrossRef]
- Mortimer, P.; Sirohi, J.; Platzer, S.; Rauleder, J. Coaxial rotor wake measurements in hover using phase-resolved and time-resolved PIV. In Proceedings of the Vertical Flight Society 75th Annual Forum, Philadelphia, PA, USA, 13–16 May 2019. [Google Scholar]
- Costes, M.; Renaud, T.; Rodriguez, B. Rotorcraft simulations: A challenge for CFD. Int. J. Comput. Fluid Dyn. 2012, 26, 383–405. [Google Scholar] [CrossRef]
- Sugiura, M.; Tanabe, Y.; Sugawara, H. Development of a hybrid method of CFD and prescribed wake model for helicopter BVI noise prediction. Trans. Jpn. Soc. Aeronaut. Space Sci. 2013, 56, 343–350. [Google Scholar] [CrossRef] [Green Version]
- Batrakov, A.; Kusyumov, A.; Kusyumov, S.; Mikhailov, S.; Barakos, G.N. Simulation of tail boom vibrations using main rotor-fuselage computational fluid dynamics (CFD). Appl. Sci. 2017, 7, 918. [Google Scholar] [CrossRef] [Green Version]
- Strawn, R.C.; Duque, E.P.N.; Ahmad, J. Rotorcraft aeroacoustics computations with overset-grid CFD methods. J. Am. Helicopter Soc. 1999, 44, 132–140. [Google Scholar] [CrossRef]
- Pomin, H.; Wagner, S. Navier-Stokes analysis of helicopter rotor aerodynamics in hover and forward flight. J. Aircr. 2002, 39, 813–821. [Google Scholar] [CrossRef]
- Potsdam, M.; Yeo, H.; Johnson, W. Rotor airloads prediction using loose aerodynamic/structural coupling. J. Aircr. 2006, 43, 732–742. [Google Scholar] [CrossRef]
- Nielsen, E.J.; Diskin, B. Discrete adjoint-based design for unsteady turbulent flows on dynamic overset unstructured grids. AIAA J. 2013, 51, 1355–1373. [Google Scholar] [CrossRef]
- Jarkowski, M.; Woodgate, M.A.; Barakos, G.N.; Rokicki, J. Towards consistent hybrid overset mesh methods for rotorcraft CFD. Int. J. Numer. Methods Fluids 2014, 74, 543–576. [Google Scholar] [CrossRef]
- Vassberg, J.C.; Tinoco, E.N.; Mani, M.; Rider, B.; Zickuhr, T.; Levy, D.W.; Brodersen, O.P.; Eisfeld, B.; Crippa, S.; Wahls, R.A.; et al. Summary of the fourth AIAA computational fluid dynamics drag prediction workshop. J. Aircr. 2014, 51, 1070–1089. [Google Scholar] [CrossRef]
- Ishikawa, H.; Koganezawa, S.; Makino, Y. Unstructured/structured overset grid simulation for the third AIAA sonic boom prediction workshop. J. Aircr. 2022, 59, 660–669. [Google Scholar] [CrossRef]
- Yang, Y.C.; Xu, G.H.; Shi, Y.J. Research on a robust overset grid method for load calculation of coaxial rotor. Int. J. Aeronaut. Space Sci. 2022, 23, 484–500. [Google Scholar] [CrossRef]
- Lu, L.; Yan, X.P.; Li, Q.; Wang, C.; Shen, K.C. Numerical study on the water-entry of asynchronous parallel projectiles at a high vertical entry speed. Ocean Eng. 2022, 250, 111026. [Google Scholar] [CrossRef]
- Kim, H.; Ranmuthugala, D.; Leong, Z.Q.; Chin, C. Six-DOF simulations of an underwater vehicle undergoing straight line and steady turning manoeuvres. Ocean Eng. 2018, 150, 102–112. [Google Scholar] [CrossRef]
- Drews, P.L.J.; Neto, A.A.; Campos, M.F.M. Hybrid Unmanned Aerial Underwater Vehicle: Modeling and Simulation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014; pp. 4637–4642. [Google Scholar]
- Kilavuz, A.; Ozgoren, M.; Kavurmacioglu, L.A.; Durhasan, T.; Sarigiguzel, F.; Sahin, B.; Akilli, H.; Sekeroglu, E.; Yaniktepe, B. Flow characteristics comparison of PIV and numerical prediction results for an unmanned underwater vehicle positioned close to the free surface. Appl. Ocean Res. 2022, 129, 103399. [Google Scholar] [CrossRef]
- Gao, T.; Wang, Y.; Pang, Y.; Cao, J. Hull shape optimization for autonomous underwater vehicles using CFD. Eng. Appl. Comput. Fluid Mech. 2016, 10, 599–607. [Google Scholar] [CrossRef] [Green Version]
- Hong, L.; Fang, R.J.; Cai, X.T.; Wang, X. Numerical Investigation on Hydrodynamic Performance of a Portable AUV. J. Mar. Sci. Eng. 2021, 9, 812. [Google Scholar] [CrossRef]
- Baaijens, F.P. Mixed finite element methods for viscoelastic flow analysis: A review. J. Non-Newton. Fluid Mech. 1998, 79, 361–385. [Google Scholar] [CrossRef]
- Baldwin, B.; Lomax, H. Thin-layer approximation and algebraic model for separated turbulentflows. In Proceedings of the 16th Aerospace Sciences Meeting, Huntsville, AL, USA, 16–18 January 1978; p. 257. [Google Scholar]
- Takahashi, S.; Monjugawa, I.; Nakahashi, K. Unsteady flow computations around moving airfoils by overset unstructured grid method. Trans. Jpn. Soc. Aeronaut. Space Sci. 2008, 51, 78–85. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rotor Type | Hingeless |
|---|---|
| Number of blades of each rotor | 2 |
| Radius | 0.25 m |
| Solidity | 0.0512 |
| Chord | 0.025 m |
| Twist | 0° |
| Root cutout | 0.053 m |
| Airfoil | NACA0015 |
| Condition No. | Pitch (°) | Shaft Backward Angle (°) | Test Speed (rpm) | CFD Speed (rpm) | Error |
|---|---|---|---|---|---|
| 1 | −3 | 40 | 104.2 | 100.5 | −3.55% |
| 2 | 0 | 34 | 98 | 93.2 | −4.90% |
| 3 | 0 | 40 | 109 | 113 | 3.67% |
| 4 | 0 | 43 | 120 | 117 | −2.50% |
| Condition No. | Blade Airfoil | Rotational Speed (rpm) | Thrust (N) | Thrust Coefficient (×10−3) |
|---|---|---|---|---|
| 1 | NACA0009 | 131.1 | 8.35 | 7.23 |
| 2 | NACA0012 | 125.6 | 7.97 | 7.53 |
| 3 | NACA0015 | 113 | 7.05 | 8.22 |
| Condition No. | Number of Blades | Rotational Speed (rpm) | Thrust (N) | Thrust Coefficient (×10−3) |
|---|---|---|---|---|
| 1 | 2 | 113 | 7.05 | 8.22 |
| 2 | 3 | 97.4 | 8.24 | 12.93 |
| 3 | 4 | 90.2 | 9.47 | 17.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Chen, M.; Wang, F.; Wu, Z.; Xu, A. Numerical Simulation and PIV Experimental Investigation on Underwater Autorotating Rotor. Aerospace 2023, 10, 20. https://doi.org/10.3390/aerospace10010020
Li L, Chen M, Wang F, Wu Z, Xu A. Numerical Simulation and PIV Experimental Investigation on Underwater Autorotating Rotor. Aerospace. 2023; 10(1):20. https://doi.org/10.3390/aerospace10010020
Chicago/Turabian StyleLi, Liang, Ming Chen, Fang Wang, Zhichen Wu, and Anan Xu. 2023. "Numerical Simulation and PIV Experimental Investigation on Underwater Autorotating Rotor" Aerospace 10, no. 1: 20. https://doi.org/10.3390/aerospace10010020
APA StyleLi, L., Chen, M., Wang, F., Wu, Z., & Xu, A. (2023). Numerical Simulation and PIV Experimental Investigation on Underwater Autorotating Rotor. Aerospace, 10(1), 20. https://doi.org/10.3390/aerospace10010020