

Thrust Control Method and Technology of Variable-Thrust Liquid Engine for Reusable Launch Rocket


Abstract
:1. Introduction
2. Working Principle and Model of Variable-Thrust Control System for Liquid Rocket Engine
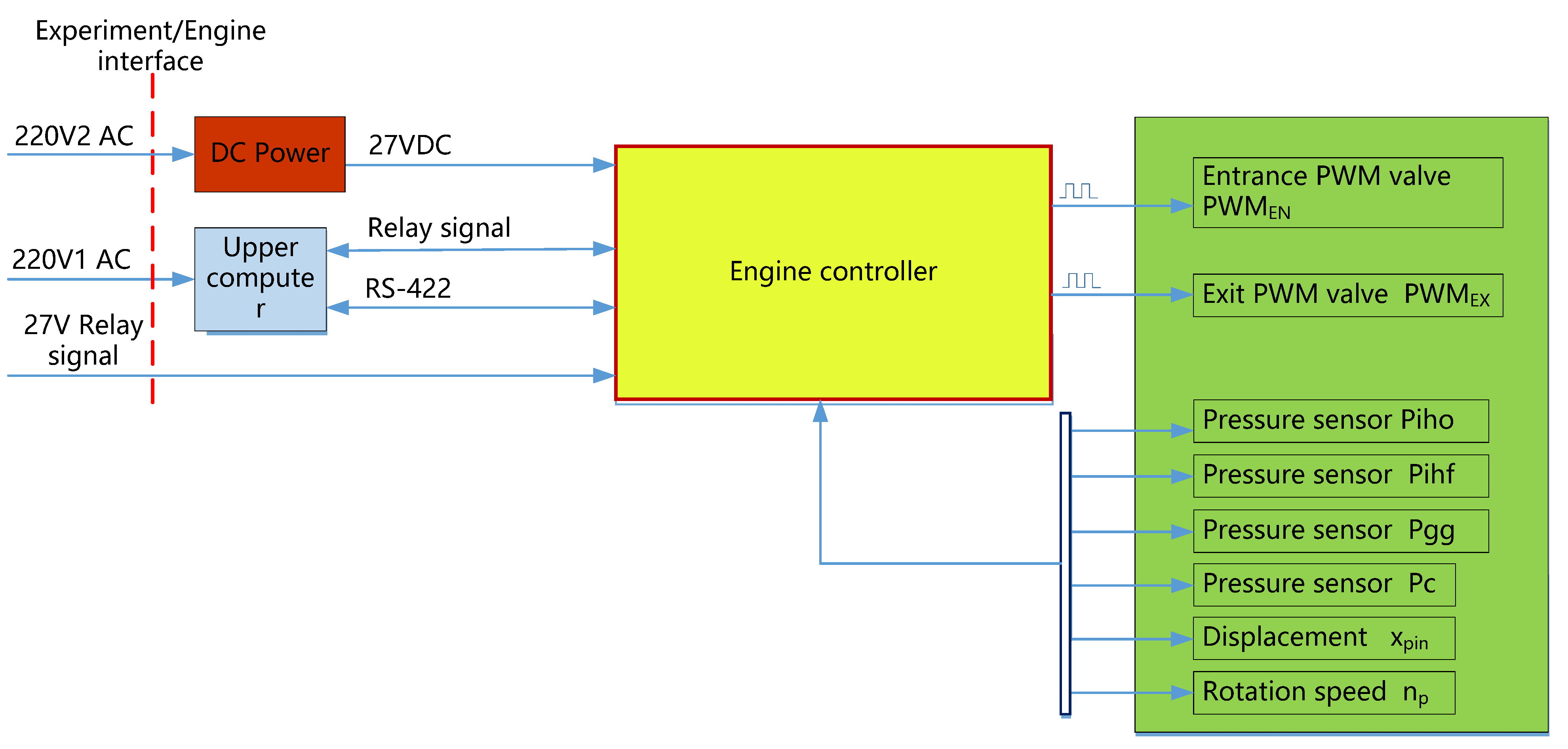
2.1. Composition and Working Principle of Thrust Adjustment System
2.2. Dynamic Model of Thrust Adjustment System
2.3. Control System Design and Simulation
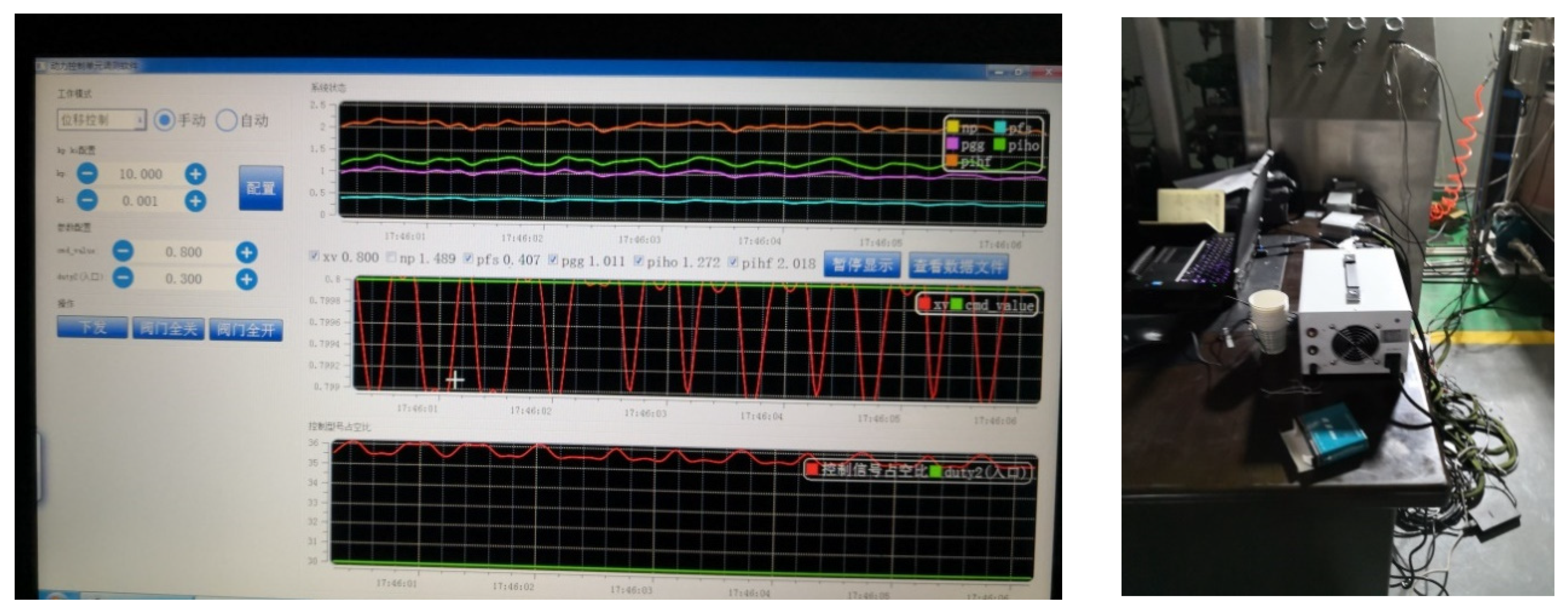
3. Experimental Research on Variable-Thrust Control System
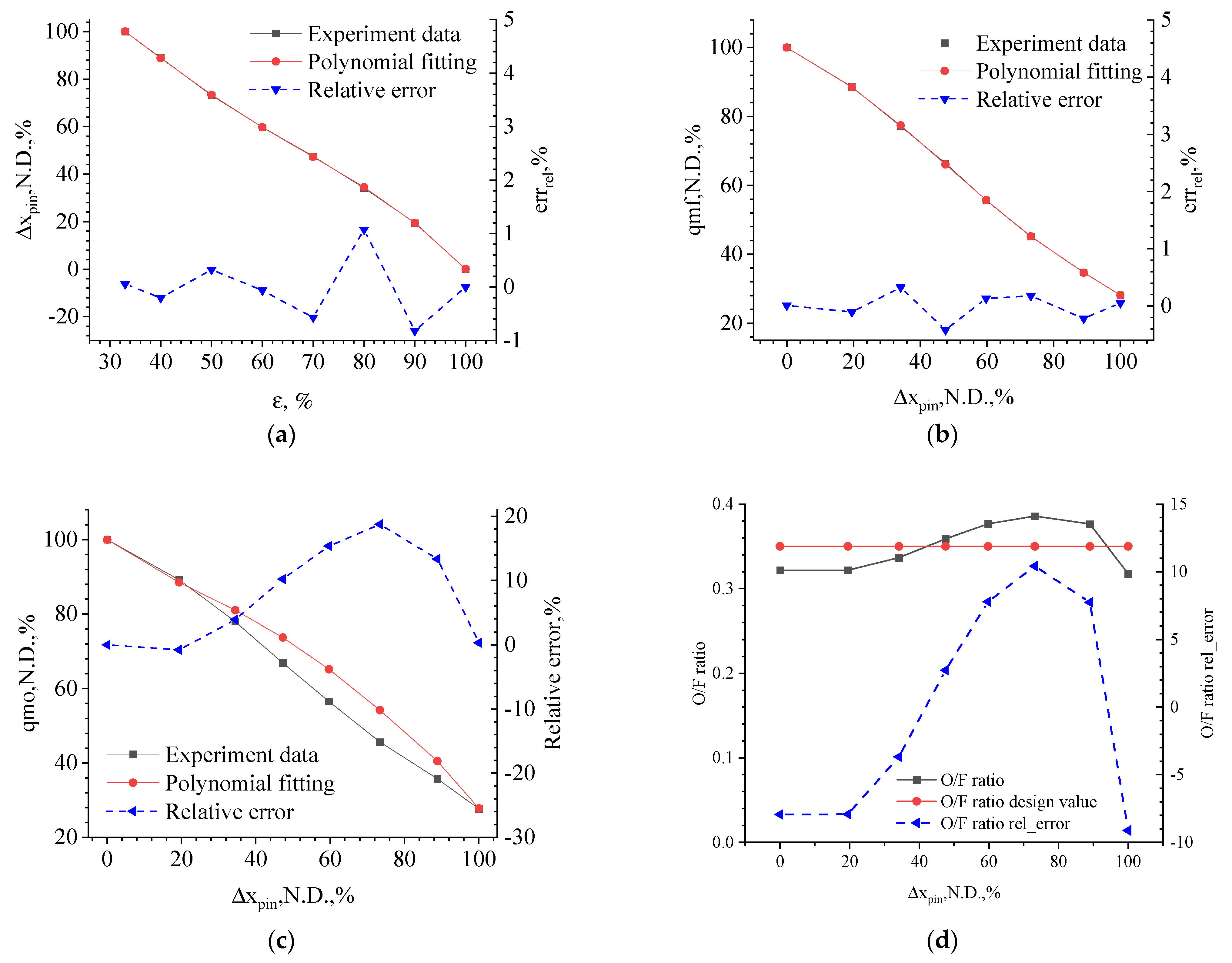
3.1. Experimental Research on Steady-State Regulation Characteristics
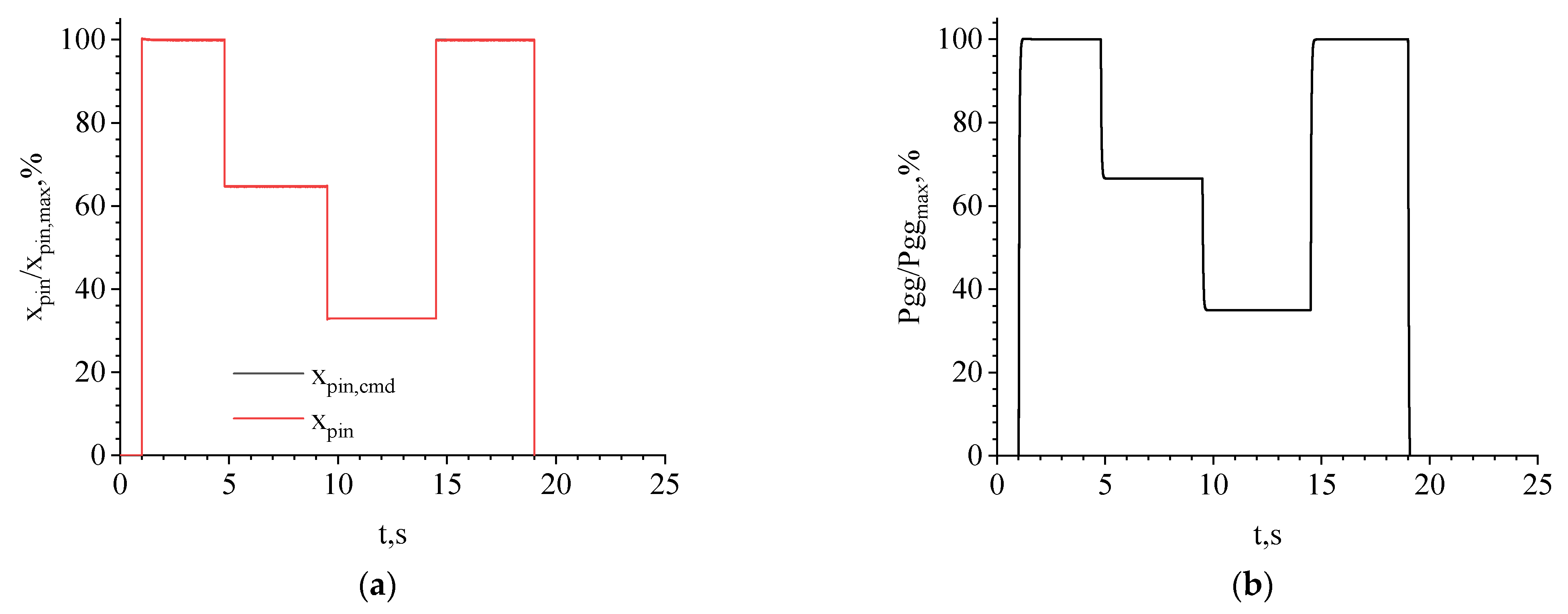
3.2. Experimental Research on Variable-Thrust Control System
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.-L. State-space analysis of the dynamic characteristics of a variable thrust liquid propellant rocket engine. Acta Astronaut. 1984, 11, 535–541. [Google Scholar] [CrossRef]
- Doherty, M.; Gaby, J.; Salerno, L.; Sutherlin, S. Cryogenic Fluid Management Technology for Moon and Mars Missions. In Proceedings of the AIAA Space 2009 Conference & Exposition, Pasadena, CA, USA, 14–17 September 2009. [Google Scholar] [CrossRef] [Green Version]
- Dressler, G. Summary of Deep Throttling Rocket Engines with Emphasis on Apollo LMDE. In Proceedings of the 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Sacramento, CA, USA, 9–12 July 2006. [Google Scholar] [CrossRef]
- Bazarov, V. Throttleable liquid propellant engines swirl injectors for deep smooth thrust variations. In Proceedings of the 30th Joint Propulsion Conference and Exhibit, Indianapolis, IN, USA, 27–29 June 1994. [Google Scholar] [CrossRef]
- Yue, C.; Li, J.; Hou, X.; Feng, X.; Yang, S. Summarization on variable liquid thrust rocket engines. Sci. China Technol. Sci. 2009, 52, 2918–2923. [Google Scholar] [CrossRef]
- Gilroy, R.; Sackheim, R. The lunar module descent engine—A historical summary. In Proceedings of the 25th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Monterey, CA, USA, 10–12 July 1989. [Google Scholar] [CrossRef]
- Elverum, J.G.; Hoffman, A.; Miller, J.; Rockow, R. The descent engine for the lunar module. In Proceedings of the 3rd Propulsion Joint Specialist Conference, Washington, DC, USA, 17–21 July 1967; p. 521. [Google Scholar]
- Carey, L.; Buffalo, N.Y. Dual-mode, 100–101 thrust modulation rocket engine. J. Spacecr. Rocket. 1968, 5, 168–172. [Google Scholar] [CrossRef]
- Zhang, R.; Lan, X.; Chen, W.; Lei, J. The development of 7500 N variable thrust engine for Chang’E-3. Sci. Sin. Technol. 2014, 44, 569–575. [Google Scholar] [CrossRef]
- Jin, G.; Cao, W.; Chen, J.; Wang, R.; Liu, F.; Wei, Y. Key technologies and flight performance analysis for Chang’E-3 lunar lander propulsion system. Sci. Sin. Technol. 2014, 44, 385–390. [Google Scholar] [CrossRef]
- Strunz, R.; Herrmann, J.W. Reliability as an Independent Variable Applied to Liquid Rocket Engine Hot Fire Test Plans. J. Propuls. Power 2011, 27, 1032–1044. [Google Scholar] [CrossRef]
- Son, M.; Radhakrishnan, K.; Yoon, Y.; Koo, J. Numerical study on the combustion characteristics of a fuel-centered pintle injector for methane rocket engines. Acta Astronaut. 2017, 135, 139–149. [Google Scholar] [CrossRef]
- Song, W.; Hwang, J.; Koo, J. Atomization of gelled kerosene by multi-hole pintle injector for rocket engines. Fuel 2021, 285, 119212. [Google Scholar] [CrossRef]
- Lee, S.; Koo, J.; Yoon, Y. Effects of skip distance on the spray characteristics of a pintle injector. Acta Astronaut. 2021, 178, 471–480. [Google Scholar] [CrossRef]
- Son, M.; Lee, K.; Koo, J. Characteristics of anchoring locations and angles for GOX/GCH4 flames of an annular pintle injector. Acta Astronaut. 2020, 177, 707–713. [Google Scholar] [CrossRef]
- Yu, N.; Zhou, C.; Cai, G.; Wang, J. 2.5 kN pump-pressure pintle engine ignition experiment in different loading cases. Aerosp. Sci. Technol. 2022, 127, 107732. [Google Scholar] [CrossRef]
- Zhao, F.; Zhang, H.; Zhang, H.; Bai, B.; Zhao, L. Review of atomization and mixing characteristics of pintle injectors. Acta Astronaut. 2022, 200, 400–419. [Google Scholar] [CrossRef]
- Kang, D.; Han, S.; Ryu, C.; Ko, Y. Design of pintle injector using Kerosene-LOx as propellant and solving the problem of pintle tip thermal damage in hot firing test. Acta Astronaut. 2022, 201, 48–58. [Google Scholar] [CrossRef]
- Dressler, G.A.; Martin Bauer, J. TRW Pintle Engine Heritage and Performance Characteristics. In Proceedings of the 36th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit 2000, 16–19 July 2000, AIAA 2000-3871. Available online: http://www.rocket-propulsion.info/resources/articles/TRW_PINTLE_ENGINE.pdf (accessed on 24 July 2000).
- Zhang, B.; Li, P.; Wang, K.; Yang, B. Review on pintle injector of throttling liquid rocket engine. J. Astronaut. 2020, 41, 1481–1489. (In Chinese) [Google Scholar]
- Li, J.; Yue, C.; Hou, X.; Feng, X. Numerical simulation of inner Flow field of a pintle Injector variable thrust rocket engine. Comput. Simul. 2009, 26, 49–52, 88. [Google Scholar]
- Huang, X.; Huang, M.; Hu, X. Frequency response characteristics of variable thrust engine with gas generator cycle. J. Rocket. Propuls. 2020, 46, 29–35. [Google Scholar]
- Jin, Y.; Xu, X.; Zhu, S.; Xiang, L. Design and test of 15:1 GO2/kerosene variable-thrust rocket engine. J. Propuls. Technol. 2018, 39, 2438–2445. [Google Scholar]
- Casiano, M.J.; Hulka, J.R.; Yang, V. Liquid-Propellant Rocket Engine Throttling: A Comprehensive Review. J. Propuls. Power 2010, 26, 897–923. [Google Scholar] [CrossRef] [Green Version]
- Cardullo, M.W. Variable-Thrust Rocket Engines and Their Modes of Operation. J. Aerosp. Sci. 1960, 27, 793–795. [Google Scholar] [CrossRef]
- Liu, D.; Huang, S.; Zhou, W. System study of deep throttling descent rocket engine for lunar lander. J. Rocket. Propuls. 2014, 4, 22–28. [Google Scholar]
- Betts, E.; Frederick, R. A Historical Systems Study of Liquid Rocket Engine Throttling Capabilities. In Proceedings of the 46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Nashville, TN, USA, 25–28 July 2010. [Google Scholar] [CrossRef]
- Norris, J.D.; Vernon, D.W. Apollo propulsion-system performance evaluation. In Proceedings of the 4th Propulsion Joint Specialist Conference, Cleveland, OH, USA, 10–14 June 1968. [Google Scholar]
- Ono, D.; Dressler, G.; Kruse, W.; Solbes, A. The design, development, and qualification of an advanced columbium liquid apogee engine(Ac-Lae). In Proceedings of the 34th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Cleveland, OH, USA, 13–15 July 1998. [Google Scholar]
- Naderi, M.; Karimi, H.; Guozhu, L. Modeling the effect of reusability on the performance of an existing LPRE. Acta Astronaut. 2021, 181, 201–216. [Google Scholar] [CrossRef]
- Giuliano, V.; Leonard, T.; Lyda, R.; Kim, T. CECE: Expanding the Envelope of Deep Throttling in Liquid Oxygen/Liquid Hydrogen Rocket Engines For NASA Exploration Missions. In Proceedings of the 46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Nashville, TN, USA, 25–28 July 2010. [Google Scholar] [CrossRef] [Green Version]
- Giuliano, V.; Leonard, T.; Adamski, W.; Kim, T. CECE: A deep throttling demonstrator cryogenic engine for NASA’s lunar lander. In Proceedings of the 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Cincinnati, OH, USA, 8–11 July 2007; p. 5480. [Google Scholar]
- Tsutsumi, S.; Hirabayashi, M.; Sato, D.; Kawatsu, K.; Sato, M.; Kimura, T.; Hashimoto, T.; Abe, M. Data-driven fault detection in a reusable rocket engine using bivariate time-series analysis. Acta Astronaut. 2021, 179, 685–694. [Google Scholar] [CrossRef]
- Li, Y.; Fang, J.; Sun, B.; Li, K.; Cai, G. Index allocation for a reusable LOX/CH4 rocket engine. Chin. J. Aeronaut. 2021, 34, 432–440. [Google Scholar] [CrossRef]
- Jo, B.-U.; Ahn, J. Optimal staging of reusable launch vehicles for minimum life cycle cost. Aerosp. Sci. Technol. 2022, 127, 107703. [Google Scholar] [CrossRef]
- Sippel, M.; Stappert, S.; Koch, A. Assessment of multiple mission reusable launch vehicles. J. Space Saf. Eng. 2019, 6, 165–180. [Google Scholar] [CrossRef] [Green Version]
- Koelle, D. The cost-optimal size of future reusable launch vehicles. Acta Astronaut. 2000, 47, 205–213. [Google Scholar] [CrossRef]
- Marks, P. SpaceX’s explosive start. New Sci. 2021, 249, 30. [Google Scholar] [CrossRef]
- Murchie, S.; Eng, D.; Chabot, N.; Guo, Y.; Arvidson, R.; Yen, A.; Trebi-Ollennu, A.; Seelos, F.; Adams, E.; Fountain, G. MERLIN: Mars-Moon Exploration, Reconnaissance and Landed Investigation. Acta Astronaut. 2014, 93, 475–482. [Google Scholar] [CrossRef]
- Zhou, X. The Analysis for Regulation Performance of a Variable Thrust Rocket Engine Control System (Journal article). Chin. J. Astronaut. 1982, 1, 18–29. Available online: https://en.cnki.com.cn/Article_en/CJFDTOTAL-YHXB198201001.htm (accessed on 18 October 2022).
- Feng, X.; Zhang, Y.; Chen, Q. A digital controller for variable thrust liquid rocket engines. In Proceedings of the 29th Joint Propulsion Conference and Exhibit, Monterey, CA, USA, 28–30 June 1993. [Google Scholar] [CrossRef]
- Cui, P.; Li, Q.; Cheng, P.; Chen, L. System scheme design for LOX/LCH4 variable thrust liquid rocket engines using motor pump. Acta Astronaut. 2020, 171, 139–150. [Google Scholar] [CrossRef]
- Cui, P.; Li, Q.; Cheng, P.; Zhang, B. A comparative study of system schemes for LOX/LCH4 expander cycle liquid rocket engine. J. Natl. Univ. Def. Technol. 2020, 42, 106–115. [Google Scholar]
- Liang, T.; Song, J.; Li, Q.; Cui, P.; Cheng, P.; Chen, L. System scheme design of electric expander cycle for LOX/LCH4 variable thrust liquid rocket engine. Acta Astronaut. 2021, 186, 451–464. [Google Scholar] [CrossRef]
- Song, J.; Liang, T.; Li, Q.; Cheng, P.; Zhang, D.; Cui, P.; Sun, J. Study on the heat transfer characteristics of regenerative cooling for LOX/LCH4 variable thrust rocket engine. Case Stud. Therm. Eng. 2021, 28, 101664. [Google Scholar] [CrossRef]
- Tournes, C.H.; Reimonte, P.A.; Shtessel, Y. Throttling of Liquid Rockets using Higher Order Sliding Mode Control. In Proceedings of the 50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Cleveland, OH, USA, 28–30 July 2014. [Google Scholar] [CrossRef]
- Cheng, P.; Li, Q.; Wu, J.; Kang, Z. Dynamic Response of a Dual-Manifold Injector Rocket Engine to Throttling. J. Propuls. Power 2018, 34, 1553–1560. [Google Scholar] [CrossRef]
- Shieber, H.; Rupert, R.C. Assurance of service life of the Mira 150A variable thrust rocket engine. J. Spacecr. Rocket. 1966, 3, 1034–1038. [Google Scholar] [CrossRef]
- Boyd, B.R.; Johnson, R.J.; Smith, T.H. Application of the Mira 150A variable-thrust engine to manned lunar flying systems. J. Spacecr. Rocket. 1968, 5, 849–851. [Google Scholar] [CrossRef]
- Gore, M.R.; Carroll, J.J.; Gore, J.J.C.M.R. Dynamics of a Variable Thrust, Pump Fed, Bipropellant, Liquid Rocket Engine System. J. Jet Propuls. 1957, 27, 35–43. [Google Scholar] [CrossRef]
- Rahn, D.; Haidn, O.; Riedmann, H. Timescale-Based Frozen Nonadiabatic Flamelet Combustion Modeling for Rocket Engine Thrust Chambers. J. Propuls. Power 2021, 37, 495–508. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.N | Hardware Name | Code | Specifications | Electrical Characteristics |
|---|---|---|---|---|
| 1 | PWM valve | PWM | Equivalent diameter 0.4 mm | Voltage 27 ± 3 V, Resistance 39 Ω, Response time 4~6 ms |
| 2 | Back pressure sensor | Pgg | pressure: 2~8 MPa; temperature: 100~200 °C; | Precision: 1% F.S (25 + 10); Excitation voltage: 10~15 VDC; Zero point output: 0.2 ± 0.1 V; Zero drift: 0.25% F.S (1/2 h); Full range output: 4.8 ± 0.1 V; Power supply current: ≤20 mA; Absolute point resistance: ≥100 MΩ |
| 3 | Servo chamber pressure sensor | Pc | pressure: 0~11 MPa; temperature: −25~25 °C; | Input 15 ± 2 V; Output 0.5~4.5 V |
| 4 | Pgg pressure sensor | Xpin | Linear displacement 2.0 mm | Input 24~28 VDC; Output 0~5 V |
| 5 | Integrated flow regulator/gas generator | — | — | — |
| S. No. | Test Code | Test Conditions | Overshoot, % | Adjustment Time, s | Steady State Error, % |
|---|---|---|---|---|---|
| 1 | XC-001 | Pc = 6.8 MPa, AOR = A3 | 4.35 | 0.11 | 0.35 |
| 2 | XC-002 | Pc = 6.8 MPa, AOR = A3 | 6.09 | 0.07 | 0.31 |
| 3 | XC-003 | Pc = 4.5 MPa, AOR = A5 | 1.50 | 0.10 | 0.35 |
| 4 | XC-004 | Pc = 4.5 MPa, AOR = A6 | 1.92 | 0.18 | 0.97 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Z.; Qi, Y.; Bao, W.; Zhang, T. Thrust Control Method and Technology of Variable-Thrust Liquid Engine for Reusable Launch Rocket. Aerospace 2023, 10, 32. https://doi.org/10.3390/aerospace10010032
Yao Z, Qi Y, Bao W, Zhang T. Thrust Control Method and Technology of Variable-Thrust Liquid Engine for Reusable Launch Rocket. Aerospace. 2023; 10(1):32. https://doi.org/10.3390/aerospace10010032
Chicago/Turabian StyleYao, Zhaohui, Yiwen Qi, Wen Bao, and Tianhong Zhang. 2023. "Thrust Control Method and Technology of Variable-Thrust Liquid Engine for Reusable Launch Rocket" Aerospace 10, no. 1: 32. https://doi.org/10.3390/aerospace10010032
APA StyleYao, Z., Qi, Y., Bao, W., & Zhang, T. (2023). Thrust Control Method and Technology of Variable-Thrust Liquid Engine for Reusable Launch Rocket. Aerospace, 10(1), 32. https://doi.org/10.3390/aerospace10010032