5.2. Icing Tunnel Experiments and Calibrations
Using the experimental set up shown in
Figure 2b, glazed, mixed phase, and rime ice were accreted on the wing, at icing tunnel temperatures ranging from −5 °C to −25 °C, with LWC of about 1 gm/m
3. The size of the water droplets in the “cloud” had a MVD of about 20 μm, and the air speed was set at 150 knots with source-fiber output power set at 1 mW to 2 mW. These values were chosen to be similar to those used in [
22].
Figure 8a shows typical ice growth curves of the intensity variations for each of the six fibers with ice thickness, as measured by the shadowgraph. This figure shows, in effect, the optical diffusion curves for glazed ice accreted for temperatures −3 °C to −5 °C. The source fiber is invariably located in the center of the array, in between fibers 3 and 4, with each of the traces corresponding to signals from the individual fibers of the ice sensor.
Figure 8b displays pictures of a typical icing run, showing increasing ice thickness together with the corresponding signals, detected by the DAS, during the initial phases of the ice growth process.
Figure 9 shows comparative ice growth curves from the FOAIS for glazed ice accreted at −3 °C to −5 °C (
Figure 9a), mixed phase ice accreted at −7 °C to −13 °C (
Figure 9b), nearly rime ice accreted at −15 to −20 °C (
Figure 9c), and totally rime ice accreted at −25 °C (
Figure 9d). Usually, the morphology of glazed is rugged, growing outward into the airflow generating “horns” on the upper and lower surfaces of the wing, as seen in
Figure 1a,b, and is particularly disruptive to the airflow. This is due to the adiabatic expansion and cooling of the air flowing over and under the stagnation line of the wing, increasing ice accretion in these areas. In this type of ice, the dissolved gasses in the droplets can escape, giving nearly transparent ice with low concentrations of micro-bubbles and micro-cracks, as seen in
Figure 1a,b and
Figure 9a. For this transparent ice, the signals from the fibers 2, 3, 4, and 5, located closer to the source fiber, detect the reflected light, which is manifested as an initial increase in intensity, peaking at ice thicknesses of 2 mm to 3 mm due to light falling within optimum acceptance angle of these fibers (
Figure 9a). With greater thickness, the reflecting ice–air inter-phase moves away from optimum, with a corresponding reduction in intensity as the fibers detect the residual diffused scattered light in the ice volume. Conversely, the outer fibers 1 and 6 detect much lower intensities, having a gradual increase for the first 4 mm to 5 mm of ice, and gradually leveling-off at greater ice thicknesses.
At temperatures of −7 °C to −13 °C, the mixed-phase ice is accreted, which results in a corresponding increase to the
FF value, as a greater percentage of the droplets freeze on impact partially trapping the dissolved gasses, which increases the density of micro-bubbles in the ice volume (
Figure 1c,d). Consequently, in this type of semitransparent ice, the contributions of the backscattering are higher, as can be seen in the corresponding ice growth curves in
Figure 9b. Here, the signals are generally lower than those in glazed ice, due to increased optical diffusion of the light due to the higher concentrations of scatterers. Similarly to glazed ice, the signal intensities of the central fibers 3 and 4 exhibit an initial increase, for first 3 mm to 4 mm of ice growth, followed by a gradual decease in signal associated with the misalignment of reflections, as described previously. However, the signals from the outer fibers 1, 2, 5, and 6 differ from those in glazed ice, having a gradual increase, and leveling-off for ice thicknesses greater than 4 mm to 5 mm. This indicates lower overall reflection contributions, and higher contributions from scattered light, which is associated with higher optical diffusion in this type of ice. As in glazed ice, spurious reflections are also detected in this type of ice, but are limited to the central two signal fibers 3, and 4.
At lower temperatures, between −20 °C to −25 °C, the ice becomes predominantly rime and opaque as the droplets freeze on impact, with
FF being close to one, accreting smooth ice into the airflow, as shown in
Figure 1e,f. The inability of dissolved gasses to escape generates a high concentration of micro-bubbles, with Mie scattering dominating the optical diffusion process, giving rime ice its characteristic white appearance. The ice growth curves are shown in
Figure 9c,d for ice accreted at temperatures of −20 °C and −25 °C, respectively. Specifically, in the case of near rime ice grown at −20 °C, shown in
Figure 9c, the inner fiber signals register small reflection peaks at about 2 mm to 3 mm of ice thickness, leveling off for ice thicknesses greater than 4 mm with the signals being solely due to scattered light. For totally rime ice accreted at −25 °C, ice growth curves are shown in
Figure 9d, exhibiting no reflection peaks and signal fluctuations, attributed to scattered light and smooth ice surface. Once again, these results are similar to the simulation graphs shown in
Figure 5c, also indicating that scattering dominates in rime ice. Comparing the two graphs in
Figure 9c,d, it is interesting to notice that both graphs are similar for ice thicknesses greater than 4 mm, having a small variation from 0 mm to 3 mm of ice in the percentage of the reflected light, which aids to distinguish these two types of ice.
The ice thickness was measured with the aforementioned shadowgraph technique, as shown in
Figure 10a, where the signals for fibers 4, 5, and 6 are shown as a function of 10 mm of ice growth, together with the shadowgraph calibration trace. Similarly,
Figure 10b shows, for comparison, the ice growth curves for fibers 4 and 6 in conjunction with the shadowgraph, whose intensity was tailored to match that of the outer fiber 6 in order to facilitate the calibration process by making the two signals very similar. Therefore, as the response of the inner fibers exhibited peak intensities around 3 mm to 4 mm due to reflections from the ice–air interface, while the outer fibers were monotonic with no intensity peak, it is convenient to measure overall ice thickness with the outer fibers, and the onset of icing with the inner fibers. This method could potentially be tailored for calibrating all the fibers individually or universally, using the inner fibers 3 and 4 which have a steep gradient of about 2∙10
−3 mW/cm to detect thin ice from 0 mm to 3 mm. Similarly, fibers 1 and 6 can be used for measuring the thicker ice up to 7 mm to 10 mm, with a gradient of about 0.08∙10
−3 mW/cm. Hence, the FOAIS system can be calibrated to measure, on the stagnation line of the wing, the ice thickness ranging from 0.2 mm to about 10 mm with an accuracy of about 0.5 mm, by using the above procedure. However, more work needs to be done to improve the procedure for different types of ice. Furthermore, it can potentially distinguish the ice type from the shape of the inner fiber traces, as will be outlined in the following section. The results shown in
Figure 9 are similar to the simulations, shown in
Figure 5a and
Figure 6a, which model the transient geometric alignment of the specular reflections from the ice–air interface, with the acceptance angles of the fibers, as well as the diffused light emanating from scattering in the ice volume. The origin of the optical signals is significant in correlating the
FF values to the optical diffusion of light in ice, and is addressed in more detail in the following section.
Summarizing the above results, in
Figure 9, the ice thickness up to 10 mm can be measured with an accuracy of about 0.3 mm (3%), using the inner fibers to measure onset of icing, from 0 mm to about 3 mm, while the outer fibers can measure up to 10 mm. The ice type can be identified qualitatively from the shape of these graphs, using the reflection and scattering intensity variations. Another useful classification of ice type are the
FF values which encompass ambient conditions, wing aerodynamics, and can be used to model the structure, texture, surface morphology, and ice shape. It is, therefore, useful to investigate the hypothesis that the intensity ice growth curves in
Figure 9 can be correlated directly to the
FF values, which is outlined in the following sections.
5.3. Measurement of Optical Diffusion in Ice
The above experimental results indicate that the optical properties of ice are dependent on the icing conditions, and aerodynamics. These parameters modify the accretion rate, surface and volume morphology of the ice, and are dependent on how rapidly the super-cooled droplets freeze on impact, and hence are directly related to the
FF values. For FOAIS, the optical diffusion is a key parameter in identifying ice type; through the relative contributions of the specular reflections and backscattering in the ice growth curves, it is important to investigate the scattering penetration or diffusion in the different types of ice. An example of this is shown in
Figure 11a where glazed ice, accepted on the leading edge of the wing, allowed most of the illumination beam to be transmitted, with low scattering contributions. Conversely, in rime ice, light diffuses much further into the ice volume, and the small size of the FOAIS cannot measure the full extent of the optical diffusion. This can be seen in the case of rime ice,
Figure 11a,b, where the ice growth curves of the outer fibers give relatively high intensities, indicating that light penetrates deeper in this type of ice.
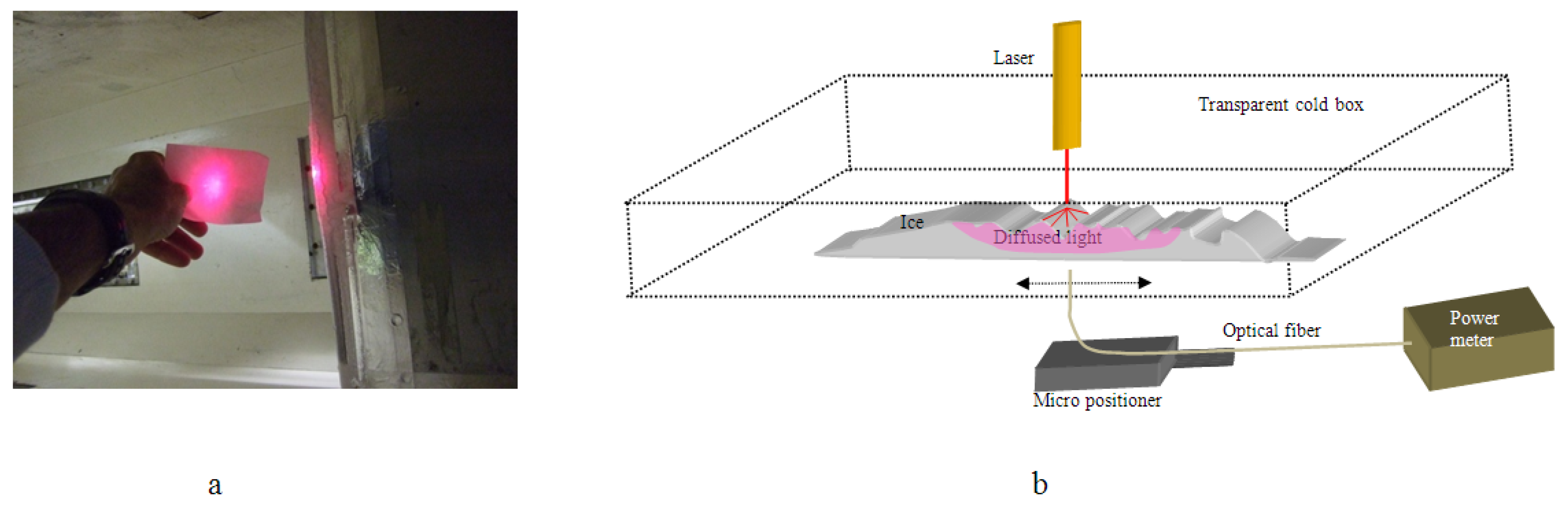
To investigate, quantitatively, optical diffusion in the different types of ice, sections of ice similar to those shown in
Figure 1 were extracted from the wing at the end of icing runs, and stored in a freezer for a short time to preserve their structure while their optical properties were measured off-line. Using the experimental arrangement shown in
Figure 11b, ice sections, of about 10 mm thick, were placed in a transparent refrigerated cool-box, and illuminated perpendicularly on the windward surface by a stationary laser beam with a wavelength of 630 nm, and beam diameter of about 2 mm. The beam diffused in the ice, and was detected on the opposite side by an optical fiber mounted on a liner translation micromanipulator, which scanned the flat bottom surface of the ice, measuring the transmitted intensity with an optical power meter. The transmitted intensities for the different types of ice, accreted at temperatures ranging from −10 °C to −20 °C, as a function of distance from the centrally located laser beam (designated as 0 mm), are shown in
Figure 12a, and resemble a Gaussian distribution. The optical penetration, in the different types of ice, was measured using the intensity Full-Width-Half-Maxima (FWHM), plotted as a function of temperature, and shown in
Figure 12b. For glazed ice which has a low
FF value, it shows that the variations of the optical diffusion, accreted at temperatures of −5 °C to −10 °C, have a FWHM of about 3 mm to 3.5 mm. As the
FF value of ice progressively increases toward 1, and the ice becomes progressively rime at temperatures from −15 °C to −20 °C, light diffuses over a wider area having a FWHM of 4.1 mm to 7.5 mm. In essence, these results show that the freezing process on the wing, which influences the concentrations of the micro-bubbles in the ice volume, is thus directly related to the way light diffuses in the ice, as shown quantitatively by the FWHM in
Figure 12b. This result highlights the close dependence of the
FF parameter on the optical diffusion in the different types of ice, and hence on the ice growth curves.
5.4. Freezing Fraction Correlation with Ice Sensor Optical Diffusion
Based on the above experimental results and discussions, it was postulated that the
FF can be correlated directly to the optical intensity ice growth curves of the inner fibers shown in
Figure 9. As the
FF values are representative of the physical process of freezing, it was hypothesized that they may also be related to the concentrations of the micro-bubbles trapped in the ice volume, and thus the optical properties of accreting ice. This hypothesis is based on the observation that when the
FF values are low, 0.1 to 0.3 for instance, the freezing process is slow, so the dissolved gasses in the super-cooled droplets can escape accreting glazed transparent ice. Therefore, as discussed earlier for this type of ice, the inner fibers, which detect reflected and scattered light, give a maximum intensity for ice thickness of about 3 to 4 mm of ice. Furthermore, as glazed ice has low concentrations of scatterers, the detected intensity reduces with increasing ice thickness, giving the characteristic ice growth curves shown in
Figure 9a.
For
FF close to 1, on the other hand, the super-cooled droplets freeze instantaneously trapping the dissolved gasses, forming high densities of micro-bubbles, thus accreting white opaque rime ice. Therefore, the detected light is predominantly due to scattering, with small reflection contributions, as shown in
Figure 9c,d. Therefore, based on these observations, a parameterization of the reflection and scattering contributions is postulated, and is in conjunction with modeling of the detection process for the different types of ice, and a semi-empirical correlation of the
FF with the optical diffusion is proposed below.
With reference to
Figure 9a–d, the ratio of reflected to scattered light, measured by the inner fibers, changes for the different types of ice, and can be used to link these two parameters. The investigation involved calculating the
FF values from the icing tunnel experimental parameters, based on Anderson and Tsao’s work [
22], and comparing them to the ice growth curves of the two inner fibers, which detected both the reflected and backscattered light. The
FF was calculated for steady conditions in the icing tunnel using relation (9) and relation (10), outlined in
Section 2.3.3. The values for
Ac were calculated using icing tunnel parameters such as the
LWC, total ice thickness measured primarily by the FOAIS, as well as shadowgraph and air speed, while the collection efficiency
β0 of the airfoil was taken from the NASA Glenn data by virtue of using a near identical wing. It is therefore proposed that the ice growth curves, measured by the
FOAIS for the different types of ice, can be used to characterize quantitatively the ice type by comparing the relative reflection and backscattered contribution to the optical signals, correlating them to corresponding
FF values. For this analysis, several ice growth data were taken under identical icing tunnel conditions for glazed, mixed phase, and rime ice. These were subsequently averaged, normalized, and the results for the inner fibers 3 and 4 are shown in
Figure 13. It is evident that the ice growth curves can be divided broadly in the region where reflections dominate, giving the distinct intensity peak at around 2 mm to 3 mm of ice thickness with a maximum normalized intensity value, which for convenience was designated as a reflection parameter
a, as seen in
Figure 13. Similarly, at greater ice thicknesses where scattering predominates, the signals generally level off, having a constant value which can be lower than the reflection peak, as in the case of glazed ice, which increases as the ice becomes progressively rime. Therefore, an equivalent scattering intensity parameter, designated as
b, can be measured at the point where the scattering signal is nearly constant i.e., when
dI/dx ~ 0, which in
Figure 13 is shown at an ice thickness of about 8 mm to 10 mm.
Observing the normalized ice growth curves in
Figure 13, the exact values of
a and
b parameters for the different types of ice are not always clear. The reflection parameter
a for glazed and mixed phase ice is quite distinct, whereas the scattering parameter
b for these types of ice is not as clear due to the gradient
dI/dx not being zero. Specifically, the reflection parameter
a, for glazed and mixed phase ice—accreted at −5 °C, −10 °C, −20 °C, and shown in
Figure 13 in black, red, and blue, respectively—is quite distinct, and can easily be identified, but it is not the same for the scattering parameter
b. The same uncertainty exits for the reflection parameter
a for rime ice accreted at −25 °C, as this trace has no distinct reflection value from which it can be measured accurately.
This was resolved by using the simulations for glazed and rime ice, as outlined in
Section 4 (
Figure 5), to determine the maximum reflected and scattered signals by tailoring the modeling parameters to reproduce the experimental results obtained in
Figure 13. Specifically, modeling results for all types of ice, shown in
Figure 5, display the reflection and scattering trace in black and red, respectively, with the combined traces being in blue. Thus, for rime ice, the reflection peak, identified from the black trace in
Figure 5, designates the reflection parameter
a. Similarly, when the reflection and scattering traces intersect the blue trace,
dI/dx ~ 0, they designate the scattering parameter
b. Based on these assumptions, the modeling and experimental results can be used to identify the points at which
a and
b can be measured. Furthermore, it transpires that the peak reflections, for all the types of ice, are dependent on the fiber NA and occur at about 2 mm to 3 mm of ice thickness, while the scattering parameter
b is measured at about 8 mm to 10 mm of ice.
Based on the above arguments, the relative ratios of the scattering and reflection parameters b/a can be calculated and compared with the corresponding FF values calculated from the icing tunnel parameters, as described previously. These results show that the normalized intensity ratios b/a vary as the ice changes from glazed to rime, with the value of a being larger than b for glazed ice, and gradually becoming equal as the ice becomes rime. There is a caveat, however, in this methodology for the case of rime ice, as the scattering parameter b may, on some occasions, exceed the reflection parameter a, giving values greater than 1. This can be attributed to the FOAIS parameters, and is currently being investigated. However, when that occurs, the ice is totally rime with an FF of 1, and therefore b/a ratio can also be assumed as equal to 1.
In order to investigate the relation of the
FF values to the
b/a parameter, we initially compare the
FF values obtained in the GKN icing tunnel with those of Anderson and Tsao [
22] in the NASA Glenn tunnel, using a similar dimension wing. The leading edge of their wing had a diameter
d and chord
c, of 0.8 cm and 26.7 cm, respectively. The icing condition used in their experiments had airspeeds in the range of 160 knots to 170 knots, with LWC ranging from 1.1 to 1.2 gm/m
3, icing runs durations
τ of about 2.5 min, and temperatures ranging from −7 °C to −20 °C. The calculated
FF values as a function of temperature, using relations (9, 10) from Anderson and Tsao data, are shown in
Figure 14 in red, which exhibits a linear relation with a gradient of −0.029 ∓ 0.002/degree C. In our experiments, the FOAIS was mounted on the stagnation line, at the midpoint of the wing as shown in
Figure 2b, having a diameter
d of 0.89 cm, and a cord of 31 cm. It was positioned in the center of the GKN icing tunnel, which had a width to height cross-section of 76 cm by 51 cm, respectively. The icing conditions used were similar to those of Anderson and Tsao, with airspeed ranging from 150 knots to 165 knots, temperatures from −5 °C to −25 °C, LWC of about 1 gm/m
3, and droplet MVD of about 20 μm.
The ice thickness was measured by the calibrated FOAIS, as well as by the shadowgraph for verification purposes. Several experiments were conducted with the same icing conditions and temperatures, with average icing runs
τ lasting from 2.5 to 5 min, accreting between 7 mm to 13 mm of ice. As outlined in
Section 3, the density of the cloud and LWC was monitored using the forward scattering of the shadowgraph beam as it illuminated the cloud. By scanning the shadowgraph beam along the leading edge of the wing, in the vicinity of the fiber optic ice sensor, it was possible to monitor qualitatively the cloud distribution in the beginning of icing runs. The
FF values for our wing were calculated using the same relations (9, 10), and the results are shown in in
Figure 14 in the black trace. Similarly to the NASA-Glenn results, this trace is also linear having a gradient of −0.042 ∓ 0.002/degree C. The slight variation in the gradients of the two wings can be attributed to the slightly different characteristics of the icing tunnels, but generally the two results are linear.
Finally, in order to verify the hypothesis that the
FF values are correlated to the optical characteristic of ice through the b/a parameters, both
b/a, ratios and the FF values were plotted as a function of temperature. Thus, using the normalized ice growth curves obtained from the inner fibers 3, 4 of the array ice sensor, the ratio
b/a, obtained from a number of experiments similar to those shown in
Figure 13, was plotted as a function of temperature, and the results are shown in the red trace in
Figure 15a. As can be seen from this figure, the ratio
b/a has values between 0 and 1 just like the
FF, and is also linear with temperature having a negative gradient of −0.032 ∓ 0.007/degree C. Furthermore, for comparison, in
Figure 15a the black trace is the calculated
FF of our wing as a function of temperature, copied from
Figure 14. Comparing the gradients of these two traces, it can be seen that their slopes are similar, having values of −0.032 ∓ 0.007/degree C for the
b/a ratio, and −0.042 ∓ 0.002/degree C for the calculated
FF. There two traces indicate a strong correlation between the two parameters which can be seen more clearly if the ratio
b/a and the
FF values are plotted together, i.e., the two traces in
Figure 14 are plotted in
Figure 15b. It is apparent that there is a close correlation of the two parameters, exhibiting a linear relation with a gradient of about 0.75. This indicates the value of our assumption that the ice growth curves through the relative contributions from the reflected and scattered intensities, i.e., the parameter
b/a, can be correlated directly to the
FF of the wing in the icing tunnel.
This is the proof-of-concept semi-empirical verification of the correlation of the FF with the b/a ratio, enabling the FOAIS to be used initially as a research tool in the development of aircraft wings to determine both the ice thickness type, as well as the FF of the accreting ice. Furthermore, it has the potential to be used in real time on wings to measure the ice thickness through suitable calibration using the shadowgraph technique, as well as to identify the ice type and its FF, provided that the wing can accept a maximum ice thickness of 10 mm. This is acceptable if the FOAIS is located on the inner thicker sections of the wing where ice tolerances are greater due to the large leading-edge diameter. The significance of this sensor is that it gives quantitative information on the type of ice accreted on the wings of the aircraft, through the b/a ratio, and on ice severity conditions which can potentially include SLD ice. Furthermore, the FOAIS potentially has the ability to measure the onset of icing, with thicknesses ranging from almost 0.1 mm of ice to about 10 mm using the inner and outer fiber. Additionally, it permits a number of alternative de-ice strategies which include allowing the ice to reach a certain thickness prior to de-icing so the ice will shed-off rather than melt, thus reducing secondary icing further back on the wing, as well as reducing power consumption. An additional potential benefit is that by knowing the ice thickness and the type of ice, the de-icing heater sequencing can be tailored appropriately, thus reducing power requirements.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














