Author Contributions
Conceptualization, N.Q. and T.M.; methodology, N.Q., T.M. and J.F.; validation, N.Q., J.F. and X.W.; investigation, N.Q., T.M. and J.F.; resources, T.M. and X.W.; data curation, N.Q., P.X. and L.Z.; writing—original draft preparation, N.Q. and T.M.; writing—review and editing, N.Q., J.F. and L.Z. All authors have read and agreed to the published version of the manuscript.
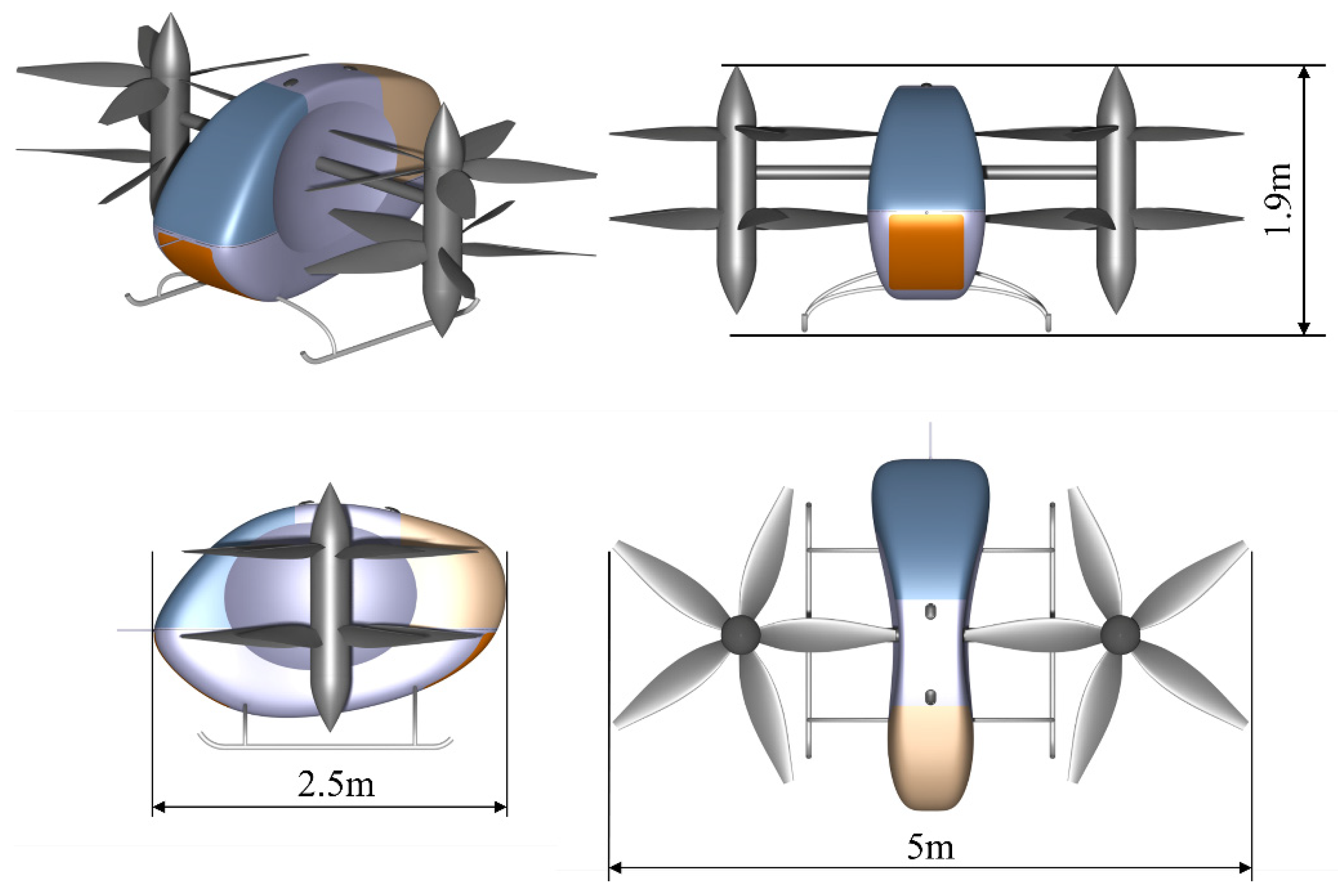
Figure 1.
Three-dimension views of the relevant eVTOL aircraft.
Figure 1.
Three-dimension views of the relevant eVTOL aircraft.
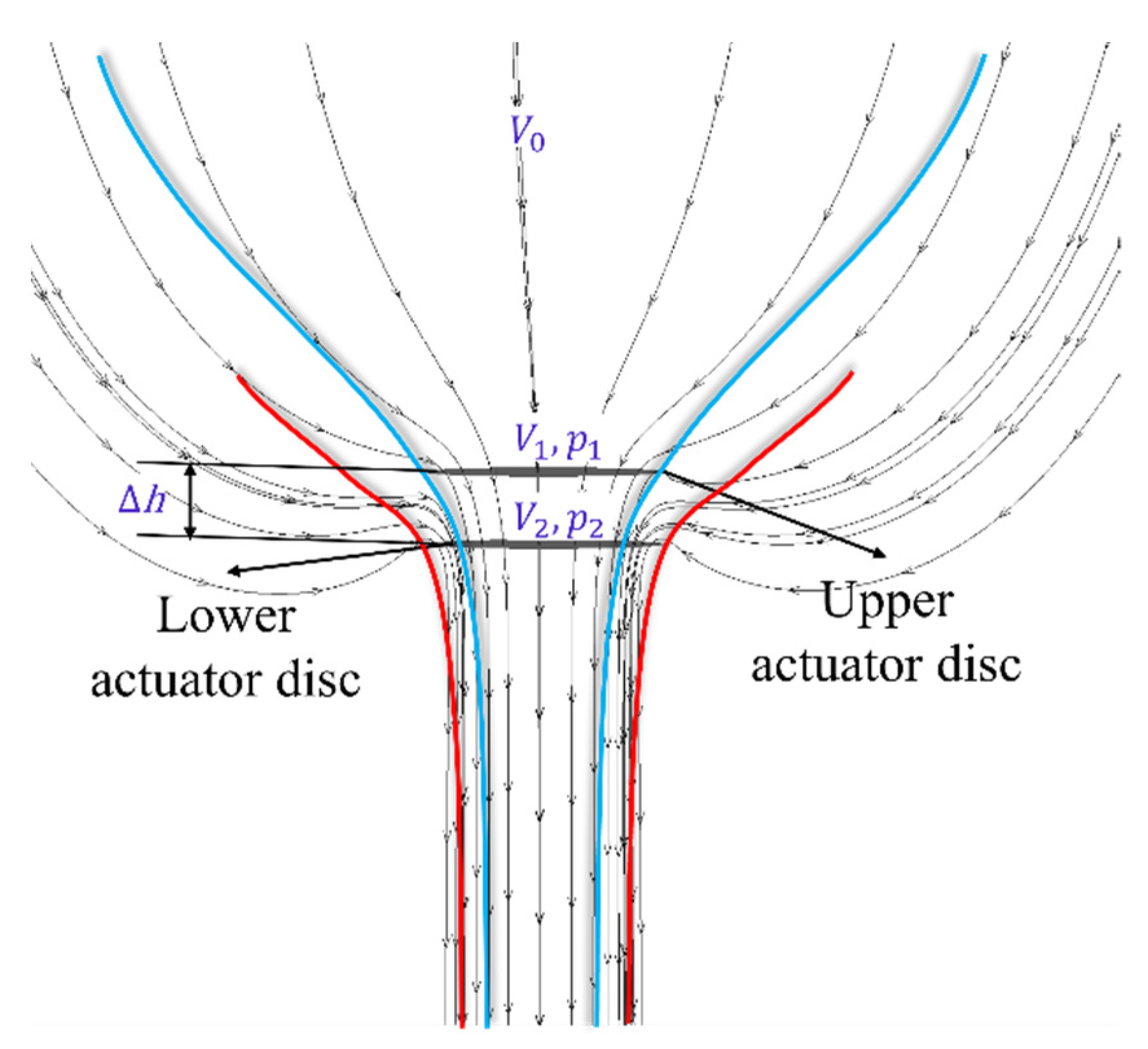
Figure 2.
Schematics of the ideal power calculation based on actuator discs method.
Figure 2.
Schematics of the ideal power calculation based on actuator discs method.
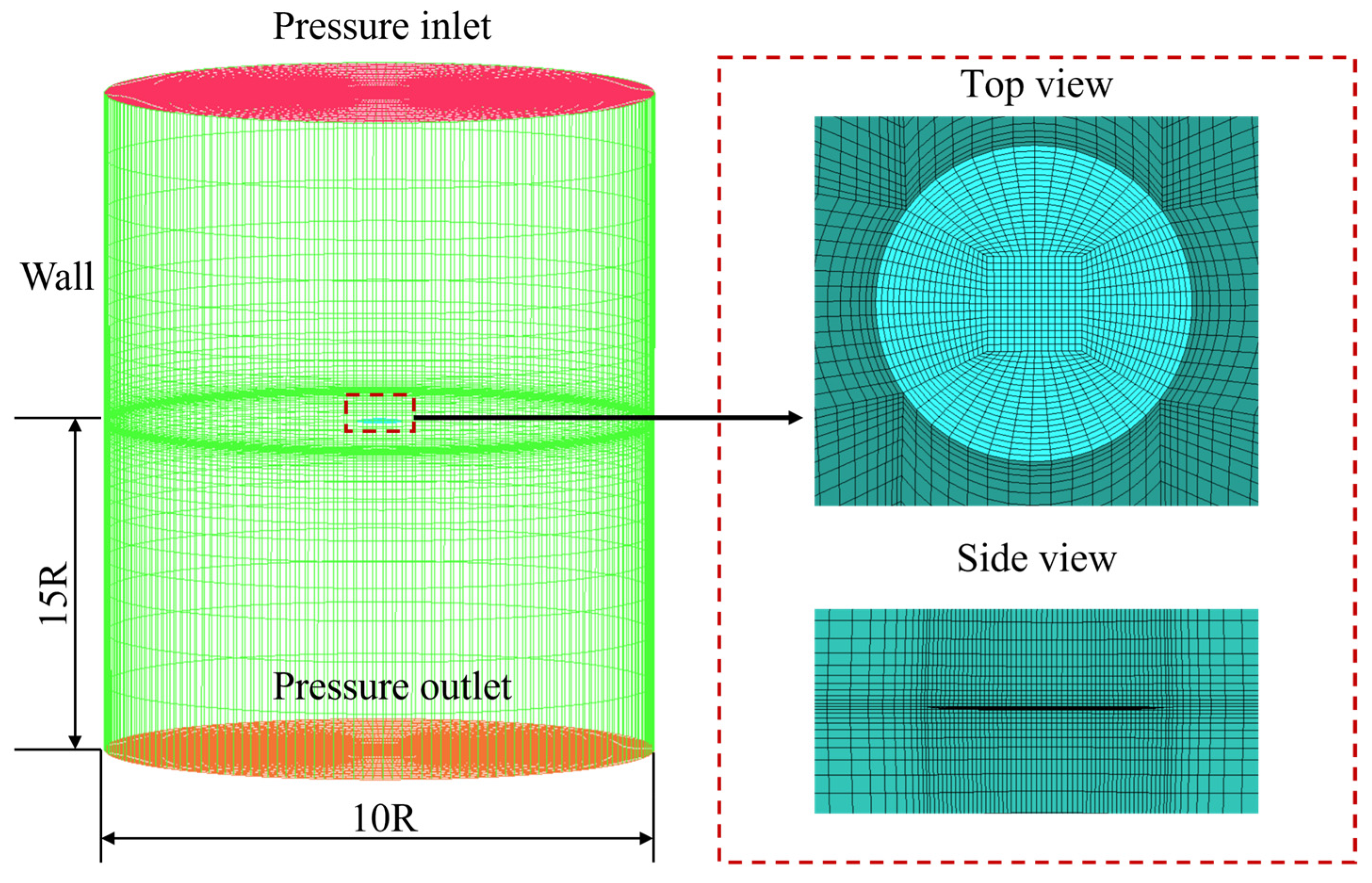
Figure 3.
The cylindrical mesh domain of the CFD actuator disc.
Figure 3.
The cylindrical mesh domain of the CFD actuator disc.
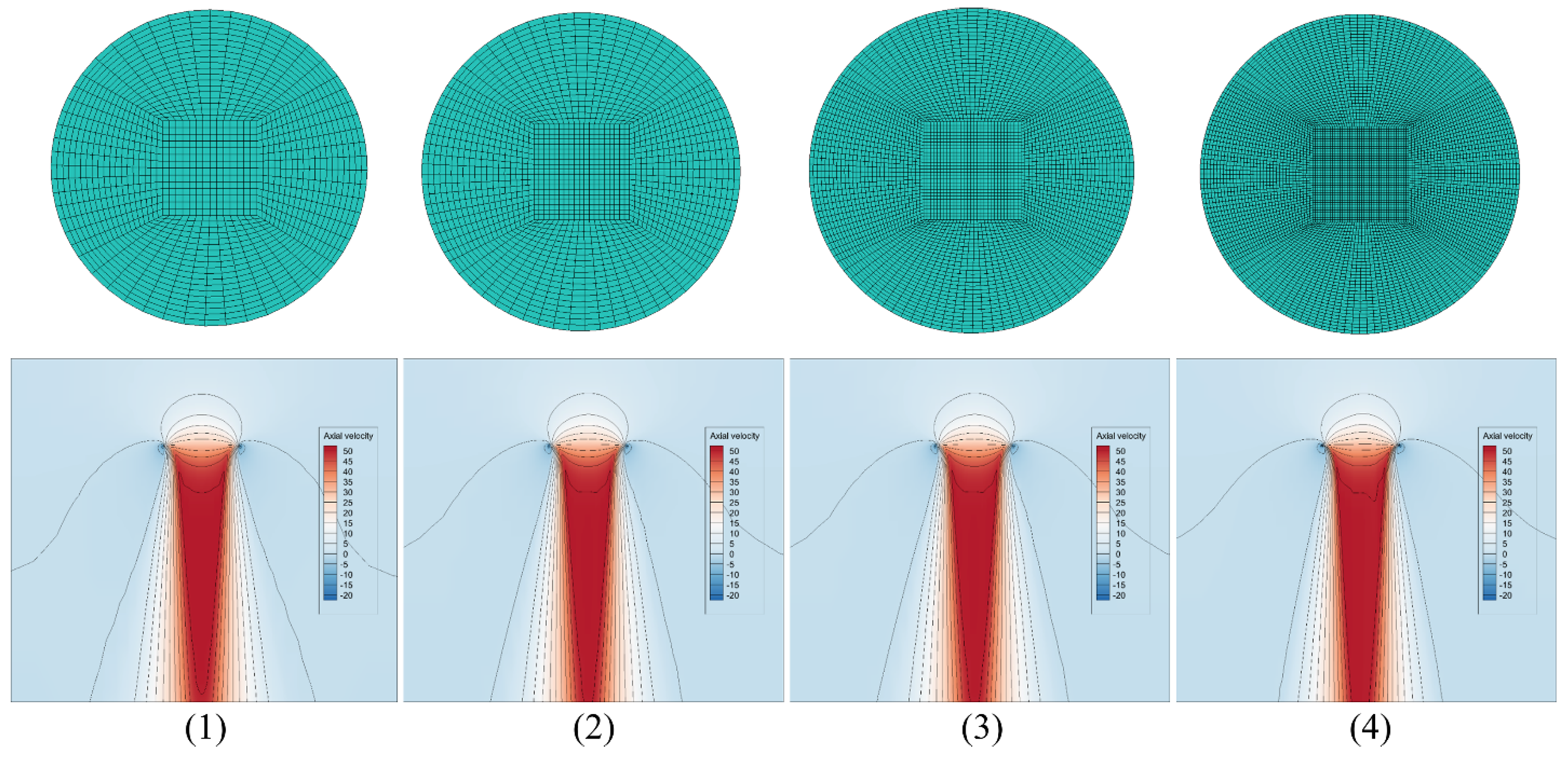
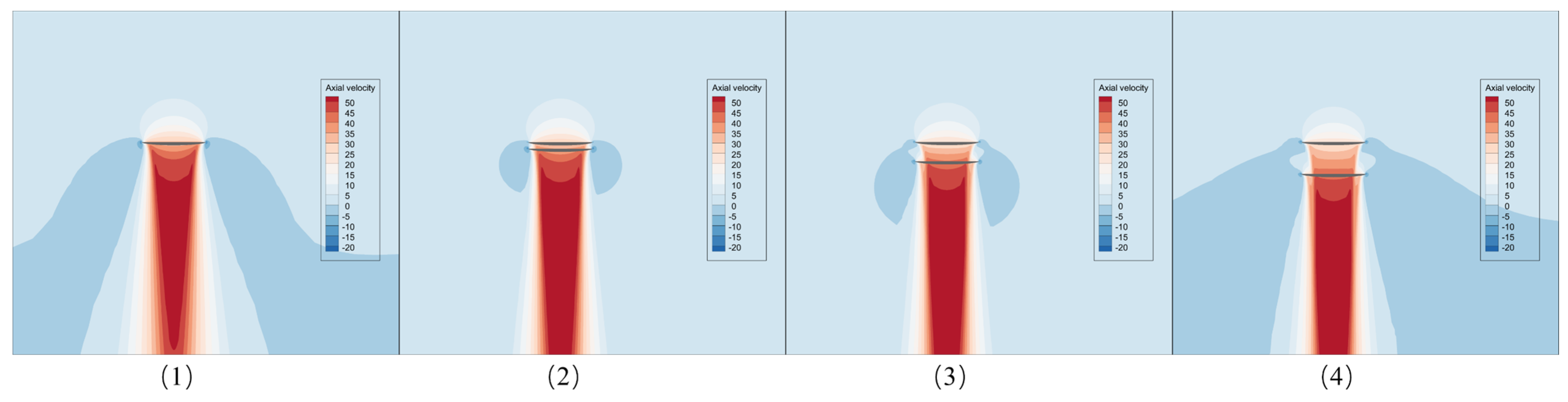
Figure 4.
Axial velocity distributions of the four different sets of CFD actuator disc mesh with cell numbers: (1) 280,000 (2) 490,000 (3) 1810,000 (4) 34,700,000.
Figure 4.
Axial velocity distributions of the four different sets of CFD actuator disc mesh with cell numbers: (1) 280,000 (2) 490,000 (3) 1810,000 (4) 34,700,000.
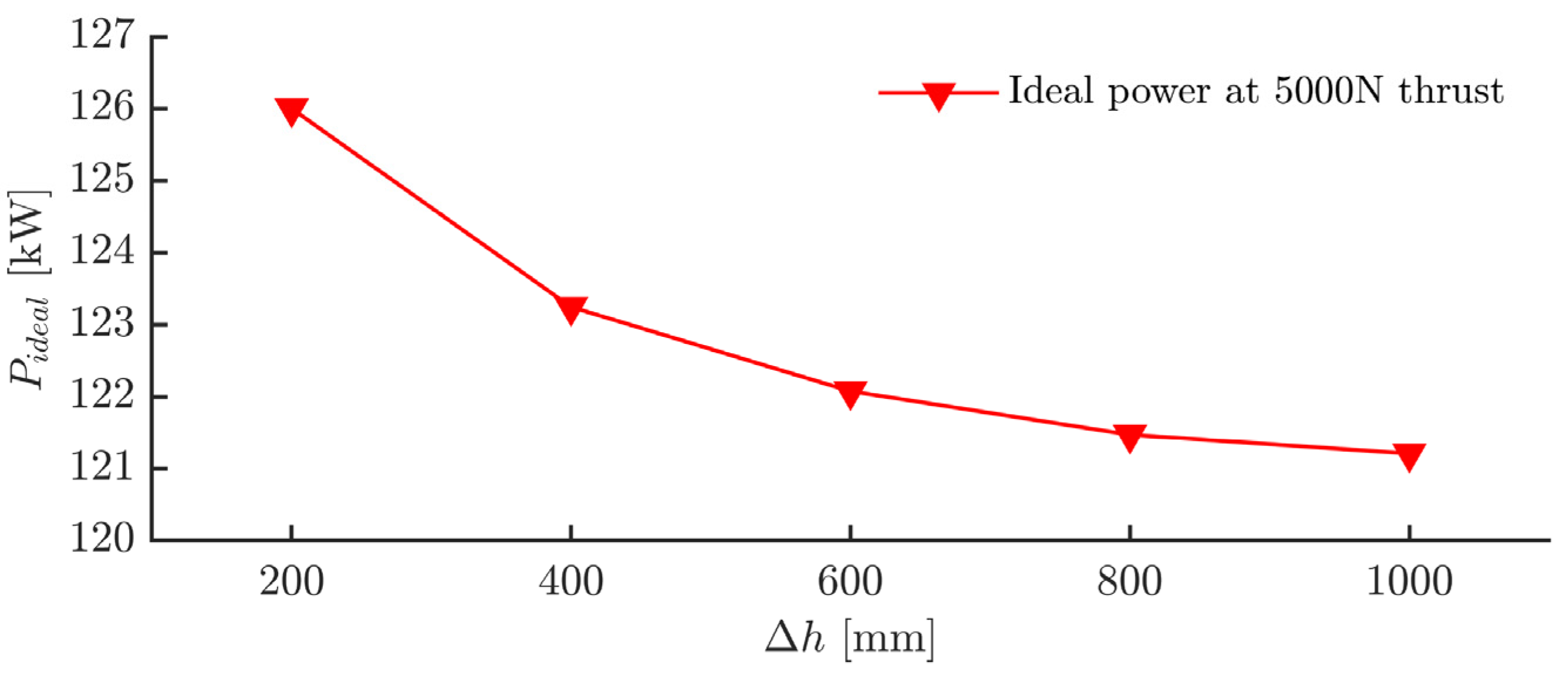
Figure 5.
Ideal power (thrust 5000 N) of dual actuator discs with spacings from 200 mm to 1000 mm.
Figure 5.
Ideal power (thrust 5000 N) of dual actuator discs with spacings from 200 mm to 1000 mm.
Figure 6.
Axial velocity distributions of different spacings (∆h: (1) Single disc; (2) 200 mm; (3) 600 mm; (4) 1000 mm).
Figure 6.
Axial velocity distributions of different spacings (∆h: (1) Single disc; (2) 200 mm; (3) 600 mm; (4) 1000 mm).
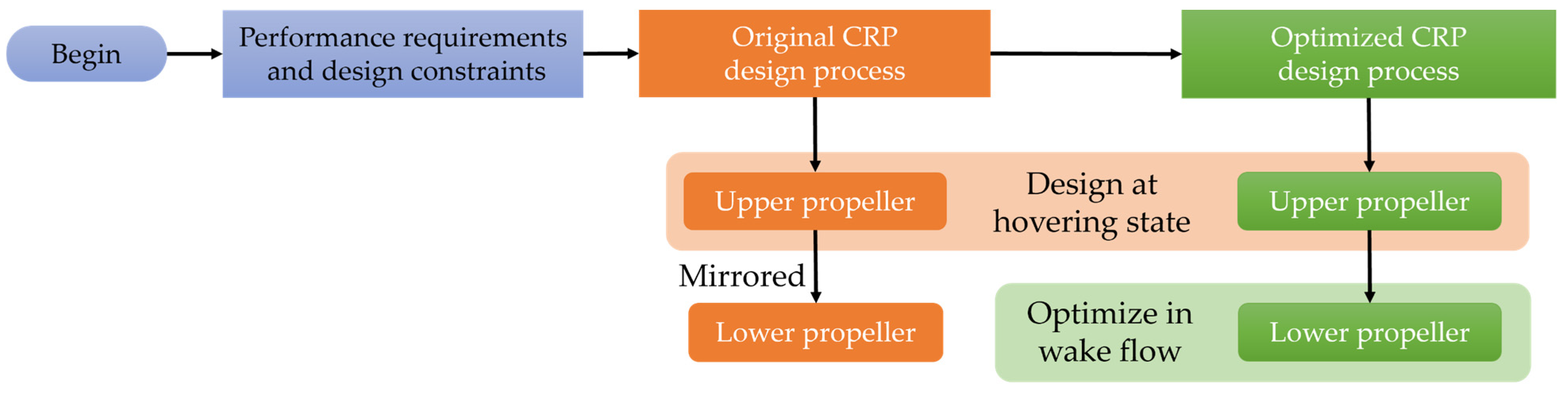
Figure 7.
Design workflow of original and optimized CRP.
Figure 7.
Design workflow of original and optimized CRP.
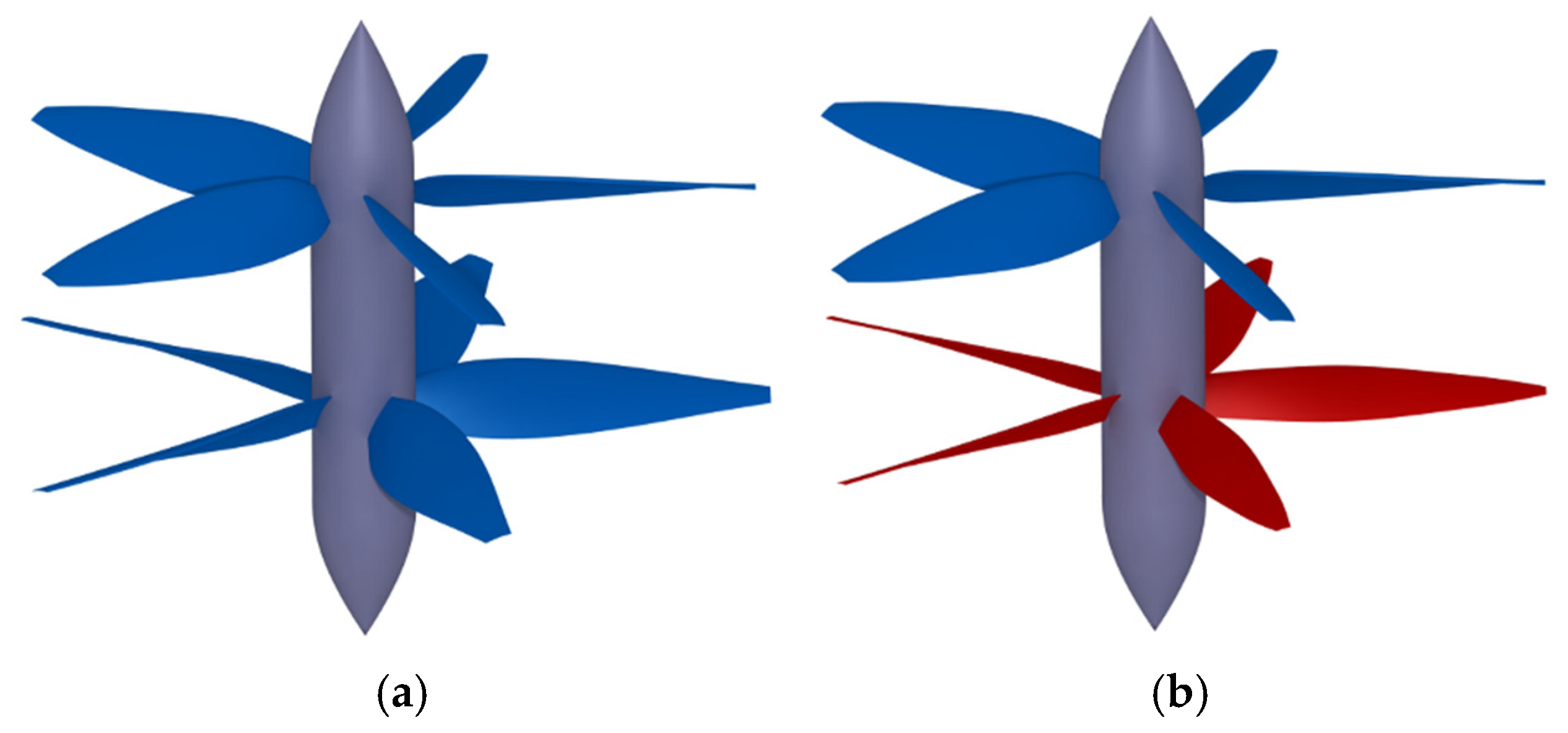
Figure 8.
Comparison of the original and optimized CRP. (a) Original propeller; (b) Optimized propeller.
Figure 8.
Comparison of the original and optimized CRP. (a) Original propeller; (b) Optimized propeller.
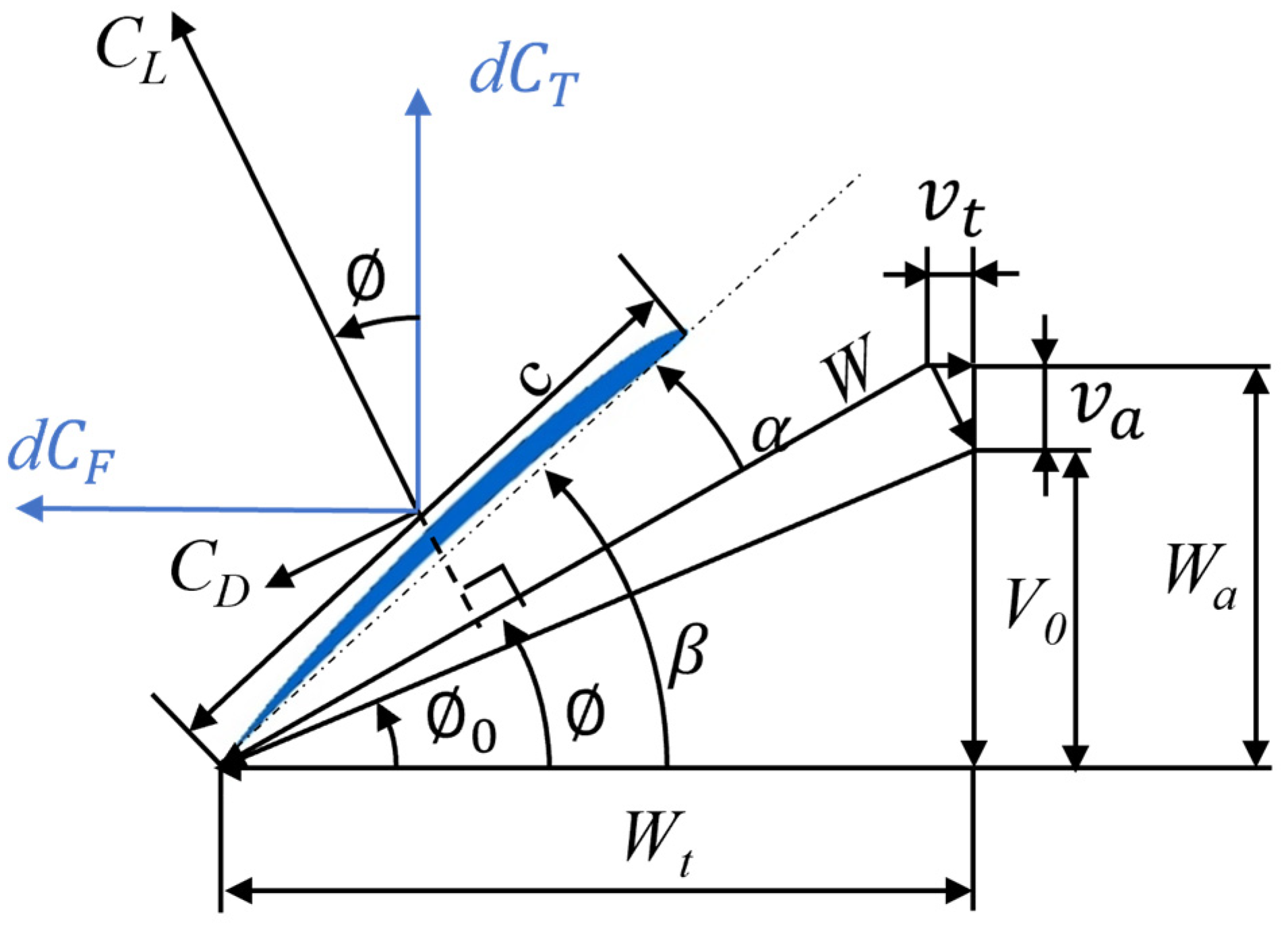
Figure 9.
The velocity triangle of the blade element airfoil.
Figure 9.
The velocity triangle of the blade element airfoil.
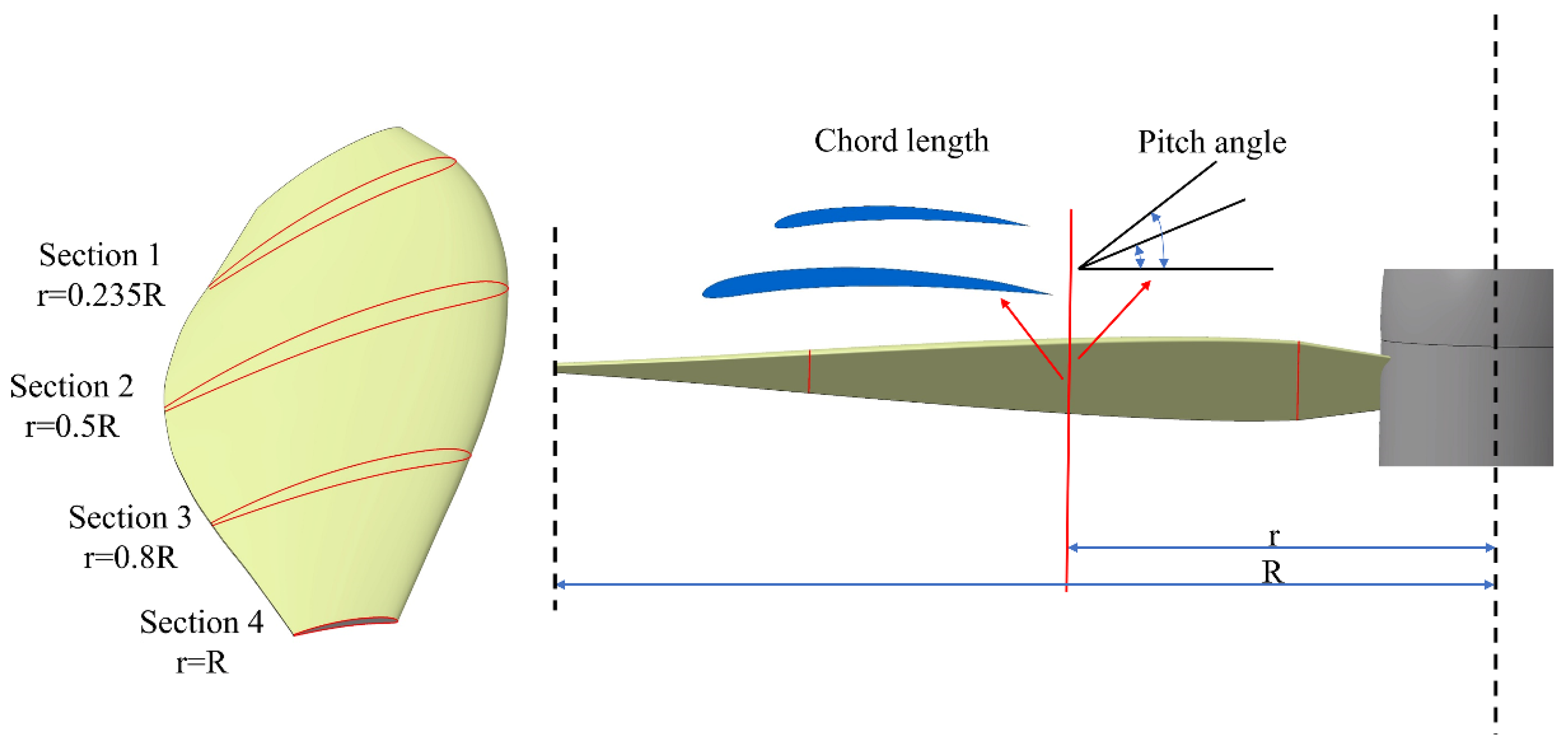
Figure 10.
Control cross-section position and design variables (chord length, pitch angle) in optimization.
Figure 10.
Control cross-section position and design variables (chord length, pitch angle) in optimization.
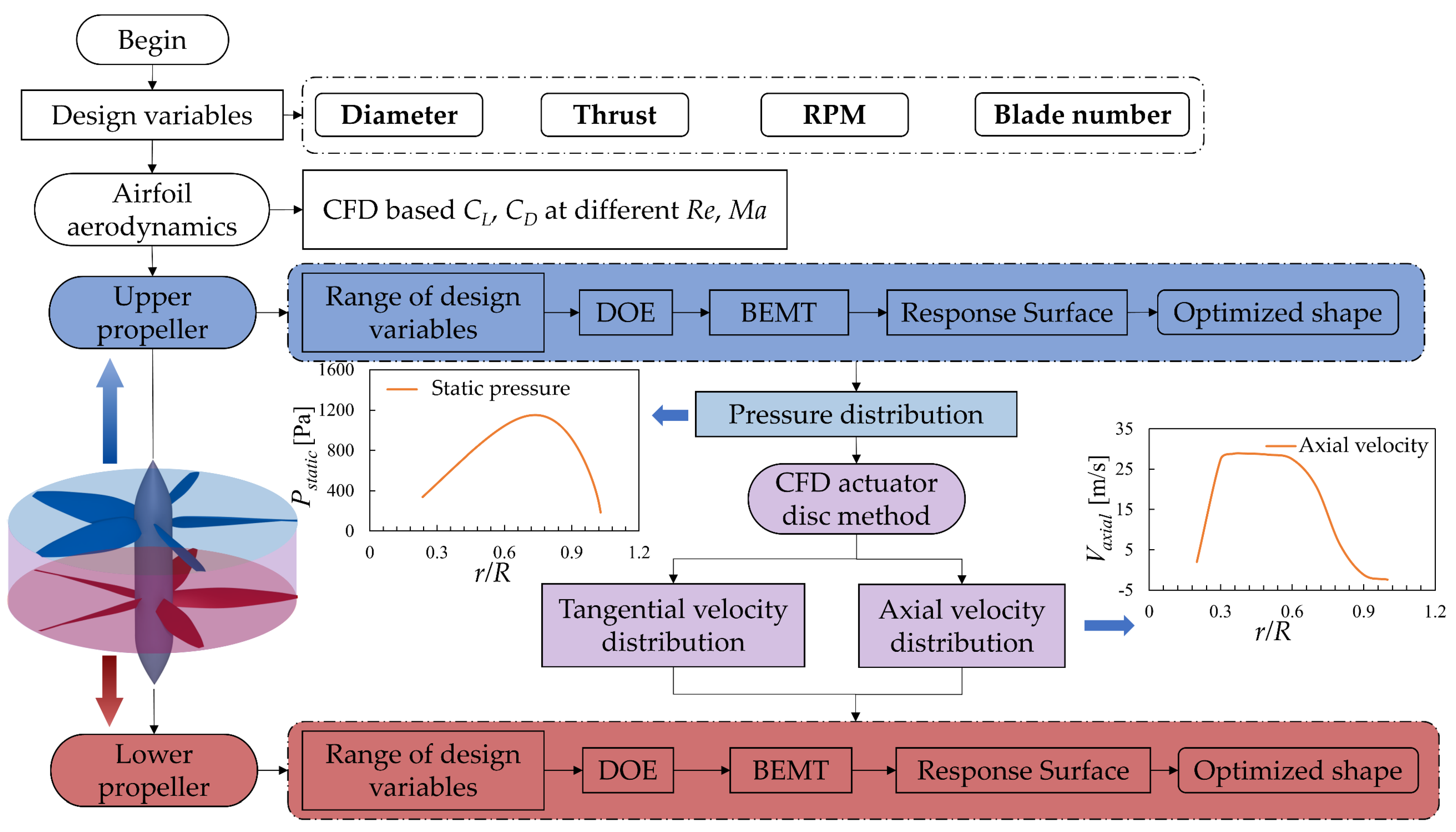
Figure 11.
The CRP overall design optimization frameworks.
Figure 11.
The CRP overall design optimization frameworks.
Figure 12.
Axial velocity distribution of the wake after the upper propeller by CFD actuator disc.
Figure 12.
Axial velocity distribution of the wake after the upper propeller by CFD actuator disc.
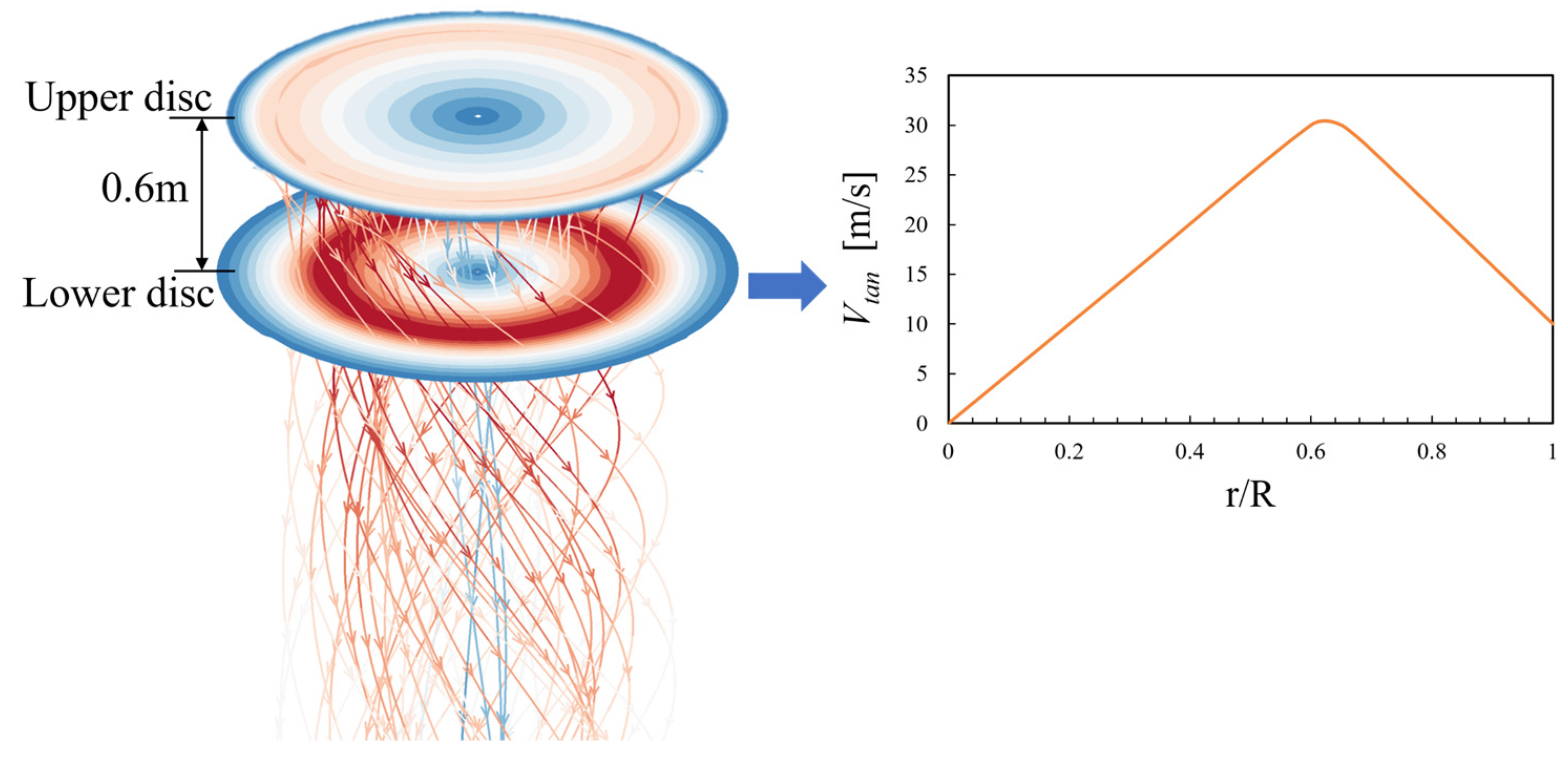
Figure 13.
Tangential velocity distribution of the wake after the upper propeller by CFD actuator disc.
Figure 13.
Tangential velocity distribution of the wake after the upper propeller by CFD actuator disc.
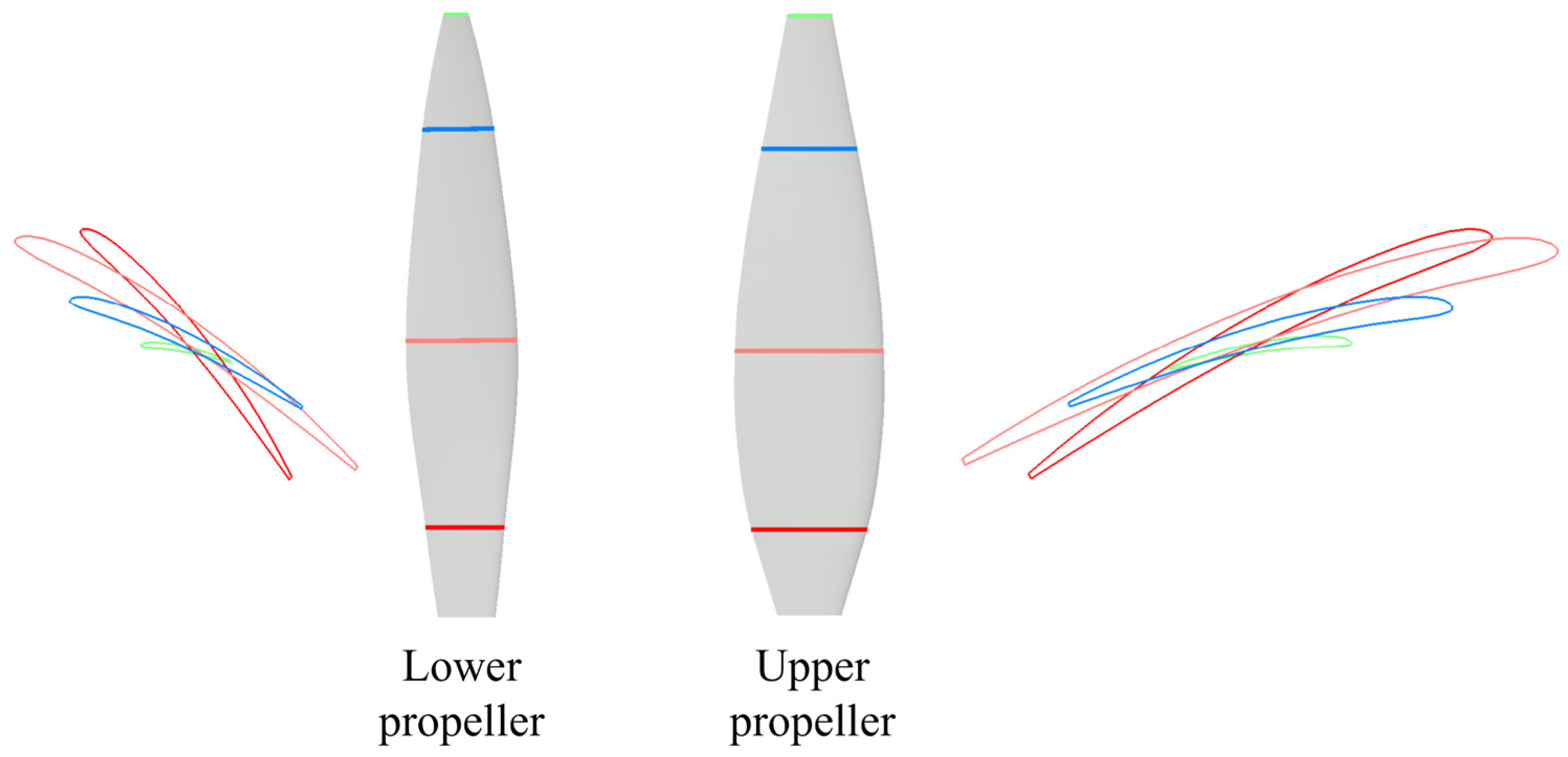
Figure 14.
The comparison of the optimized CRP upper and lower blade pitch angle distribution on four cross-sections.
Figure 14.
The comparison of the optimized CRP upper and lower blade pitch angle distribution on four cross-sections.
Figure 15.
Structured periodic grid domain for Propeller CFD calculation containing stationary and rotational regions.
Figure 15.
Structured periodic grid domain for Propeller CFD calculation containing stationary and rotational regions.
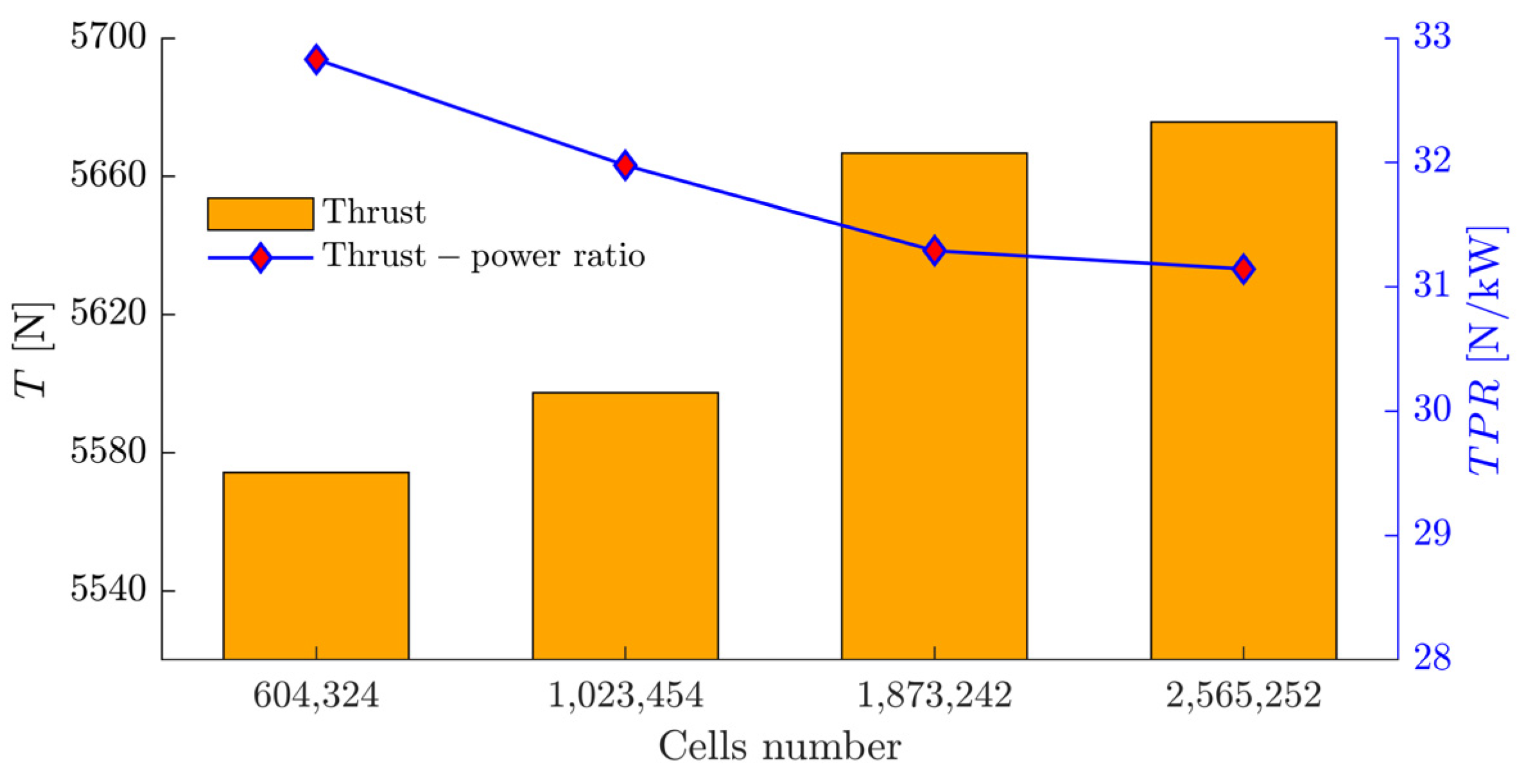
Figure 16.
Thrust and TPR of the four grid sets for the grid independence verification.
Figure 16.
Thrust and TPR of the four grid sets for the grid independence verification.
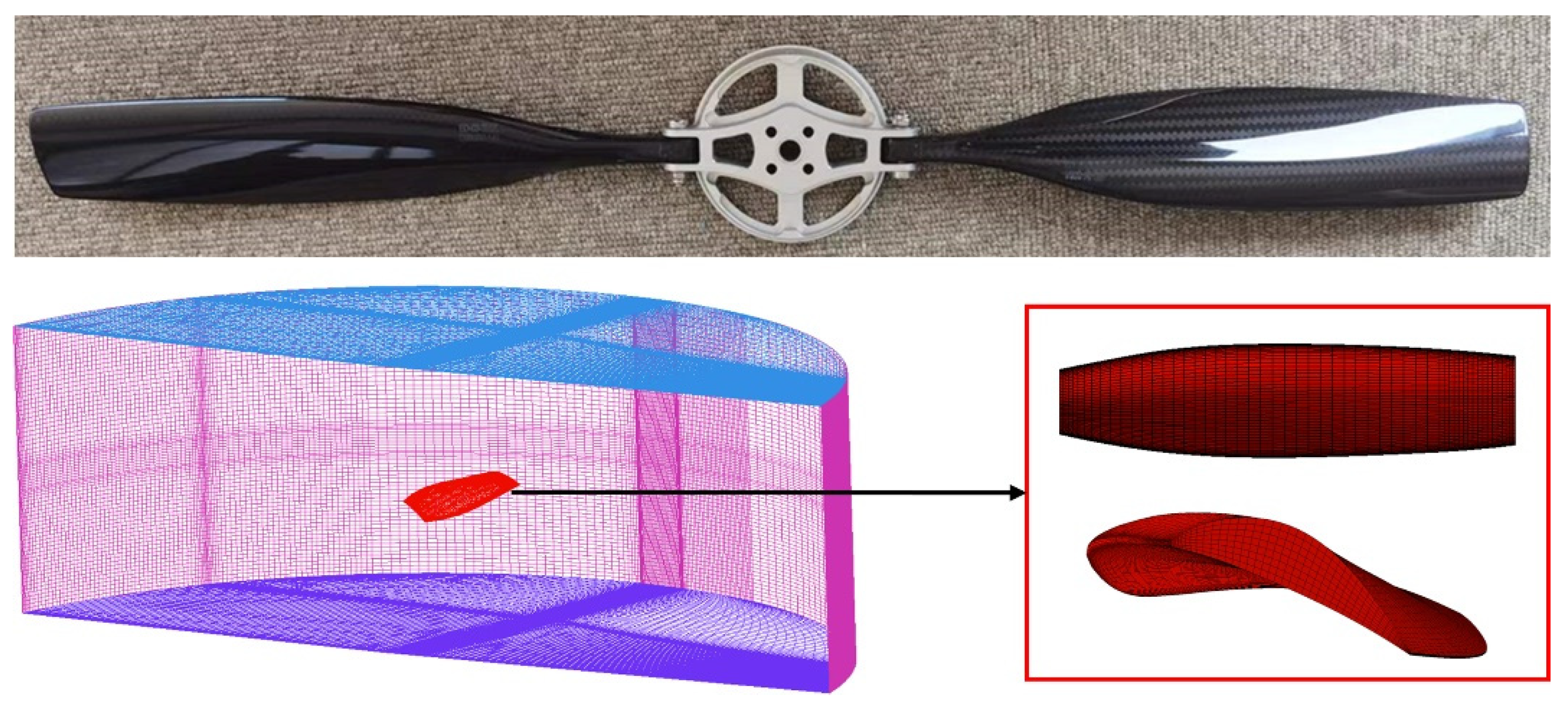
Figure 17.
Selected propeller and its grid configuration for the MRF based CFD simulation method validation.
Figure 17.
Selected propeller and its grid configuration for the MRF based CFD simulation method validation.
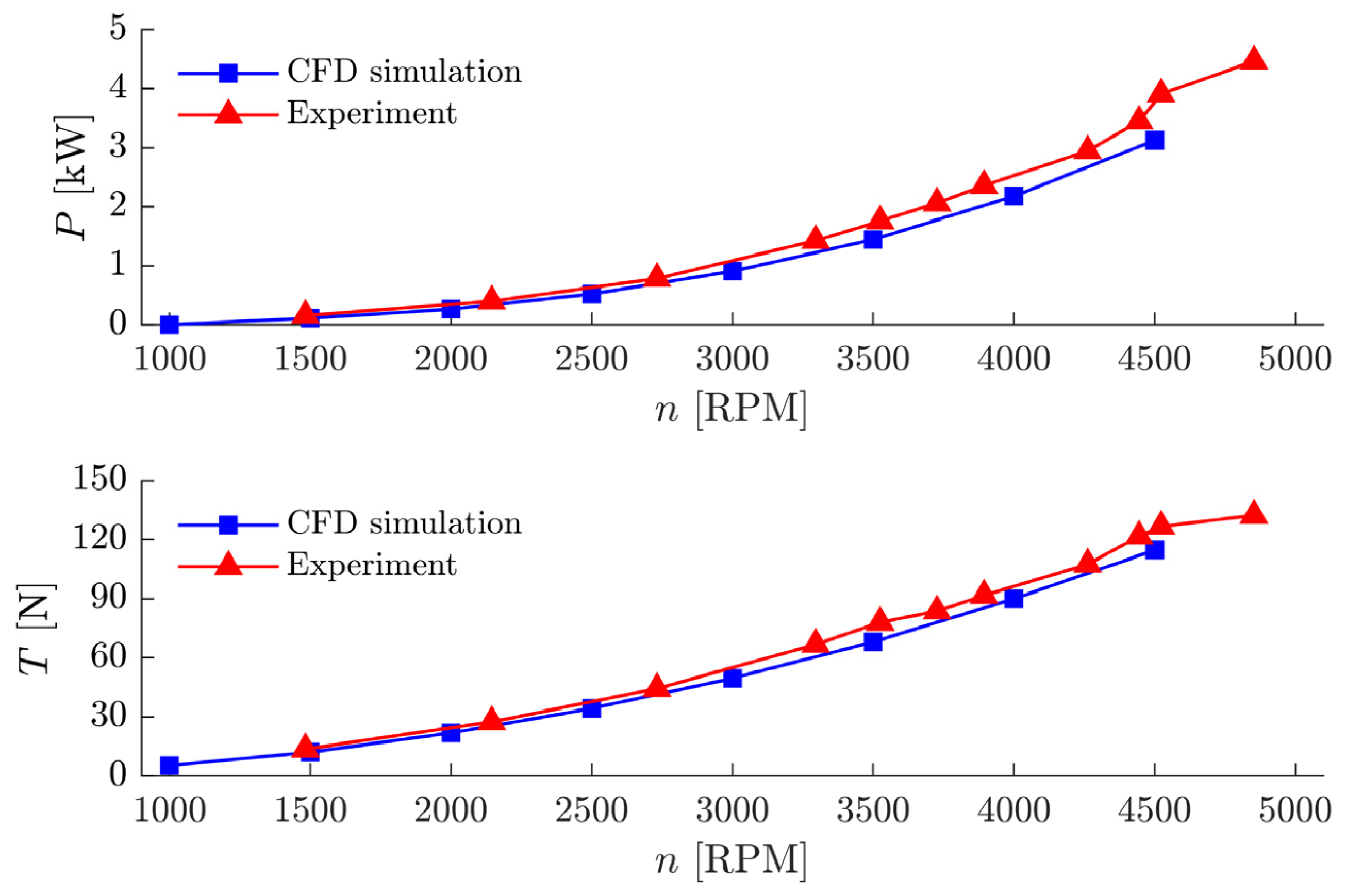
Figure 18.
Power and thrust versus revolution speed of the two-blade propeller, obtained from experiments and CFD simulation.
Figure 18.
Power and thrust versus revolution speed of the two-blade propeller, obtained from experiments and CFD simulation.
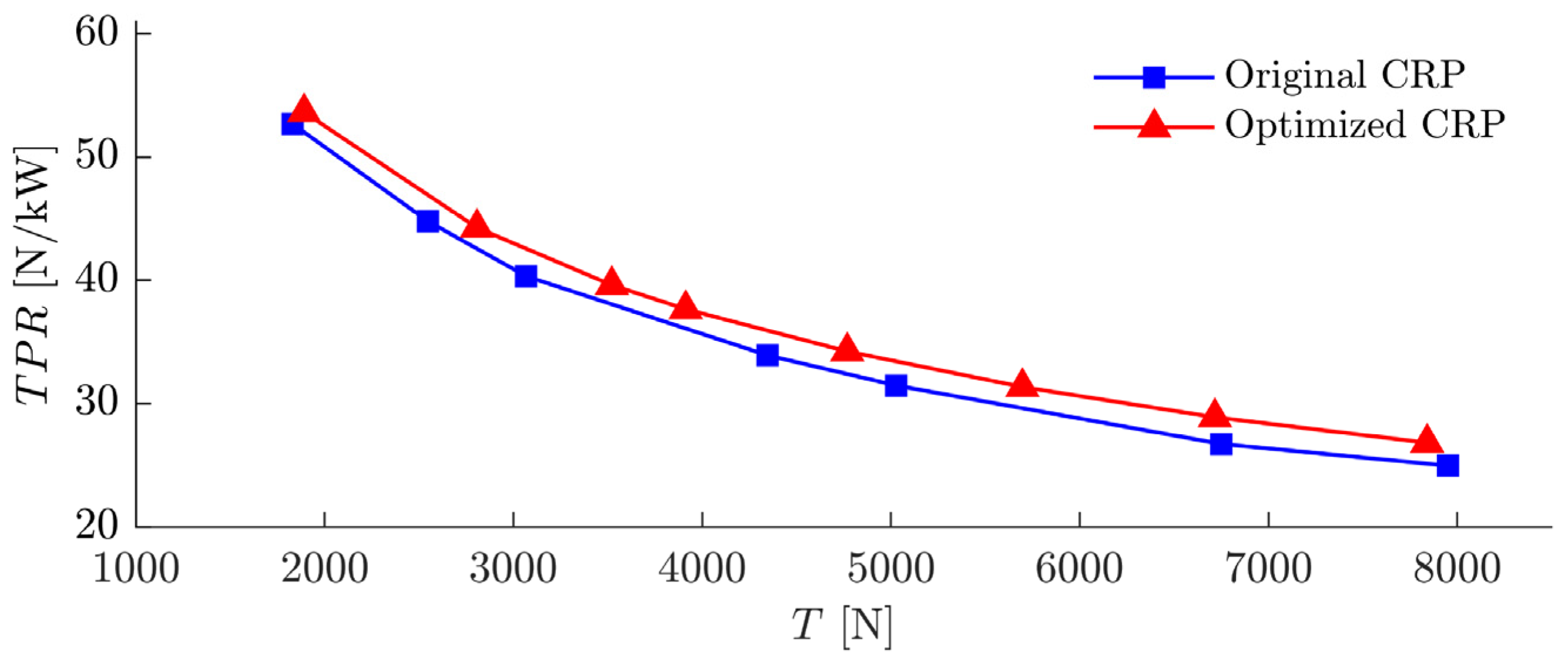
Figure 19.
TPR comparison of the original CRP and optimized CRP.
Figure 19.
TPR comparison of the original CRP and optimized CRP.
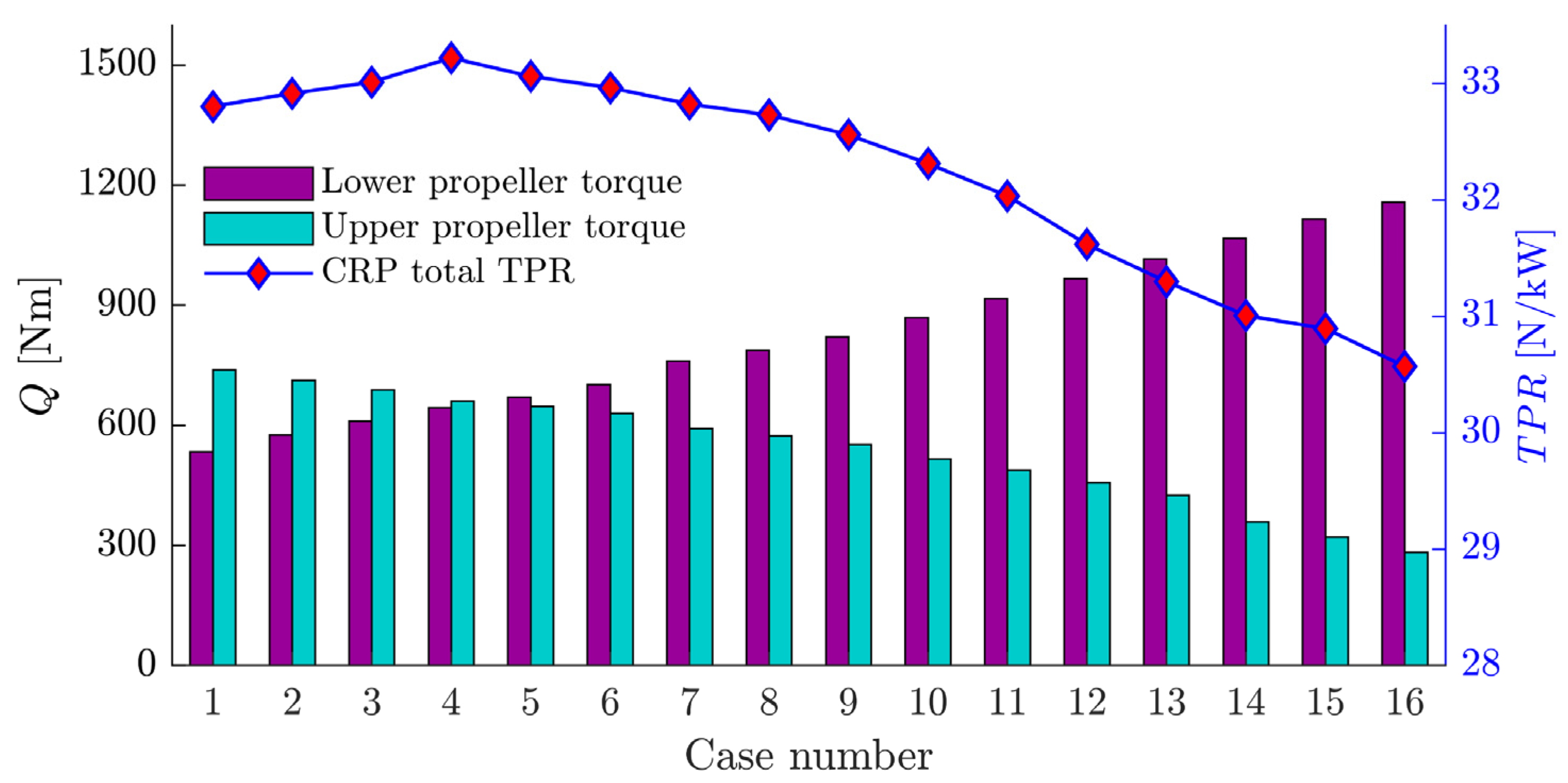
Figure 20.
The thrust and TPR of the optimized CRP at 5600 N thrust, with different upper and lower revolution speed allocations.
Figure 20.
The thrust and TPR of the optimized CRP at 5600 N thrust, with different upper and lower revolution speed allocations.
Figure 21.
The torque and TPR of the Optimized CRP at 5600 N thrust, with different upper and lower revolution speed allocations.
Figure 21.
The torque and TPR of the Optimized CRP at 5600 N thrust, with different upper and lower revolution speed allocations.
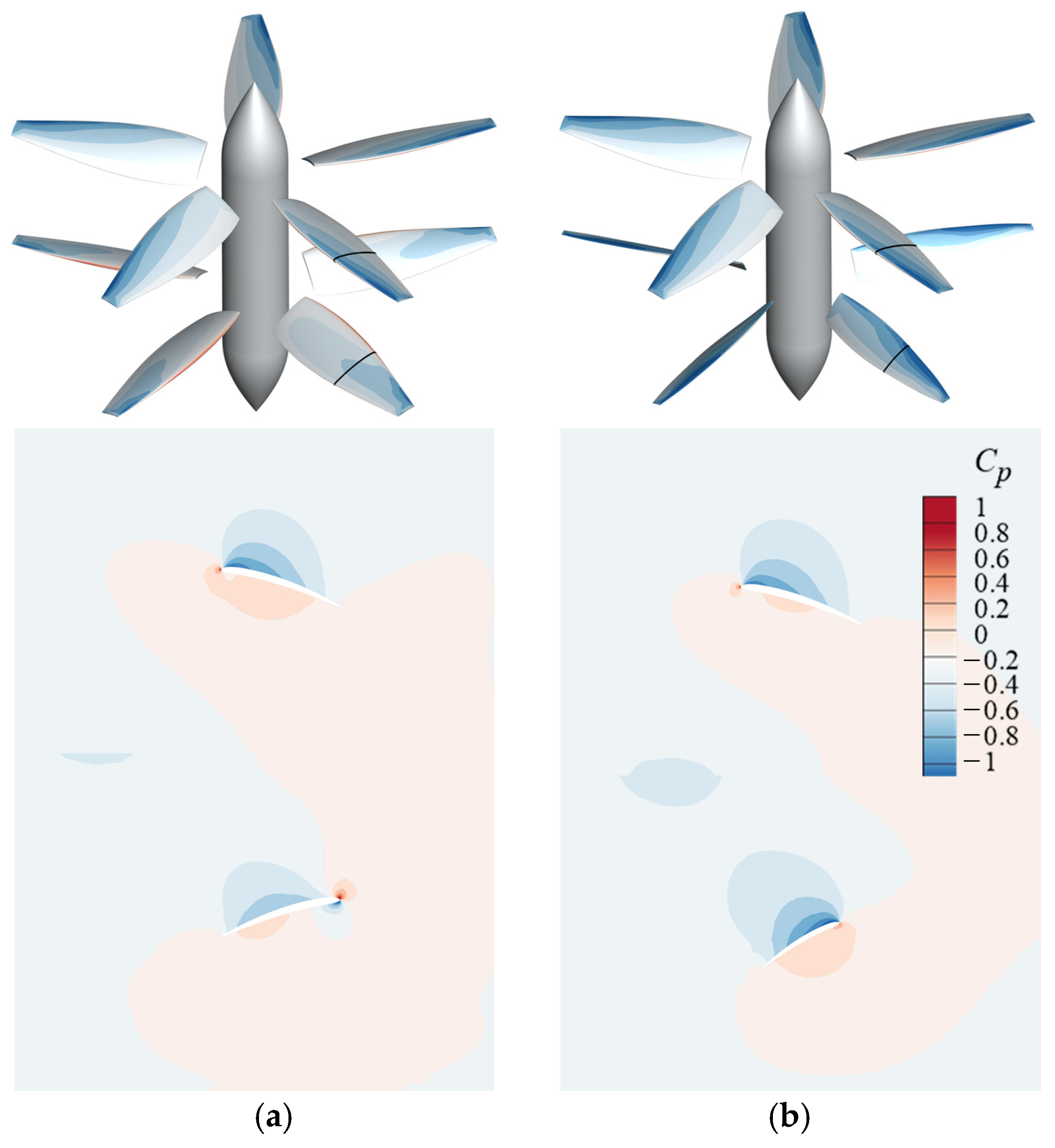
Figure 22.
Pressure coefficient profile at 70% propeller spanwise cross-section. (a) Original CRP; (b) Optimized CRP.
Figure 22.
Pressure coefficient profile at 70% propeller spanwise cross-section. (a) Original CRP; (b) Optimized CRP.
Table 1.
Salient characteristics of the eVTOL aircraft.
Table 1.
Salient characteristics of the eVTOL aircraft.
| Parameters | Value |
|---|
| Longitudinal length | 2.5 m |
| Transverse length | 5 m |
| Height | 1.9 m |
| CRP diameter | 2 m |
| Takeoff weight | 1000 kg |
Table 2.
Specifications of the four grid sets and flow rate calculation results.
Table 2.
Specifications of the four grid sets and flow rate calculation results.
| No. | Cell Number [105] | Radial Node | Circumferential Node | First Axial Layer Height [m] | Number of
Layers in the
Vertical Direction | Calculation Time [s] | Mass Flow Rate [kg/s] | Differences in
Percent between the Mass Flow Rates |
|---|
| 1 | 2.8 | 55 | 60 | 0.025 | 50 | 348 | 101.18 | 100.37% |
| 2 | 4.9 | 60 | 80 | 0.02 | 60 | 480 | 101.23 | 100.4% |
| 3 | 18.1 | 90 | 120 | 0.015 | 90 | 1366 | 101.1 | 100.29% |
| 4 | 34.7 | 110 | 160 | 0.01 | 110 | 2375 | 100.8 | 100% |
Table 3.
Ideal power of dual discs with different propeller spacings at a thrust of 5000 N.
Table 3.
Ideal power of dual discs with different propeller spacings at a thrust of 5000 N.
| | |
|---|
| Single disc | 130.709 | 1 |
| 200 | 126.004 | 0.964 |
| 400 | 123.248 | 0.943 |
| 600 | 122.078 | 0.934 |
| 800 | 121.473 | 0.930 |
| 1000 | 121.212 | 0.928 |
Table 4.
Parameters related to the CRP optimization.
Table 4.
Parameters related to the CRP optimization.
| Classification | Definitions | Symbols | Value |
|---|
| Condition parameters | Air density | | 1.16 kg/m3 |
| Altitude | h | 500 m |
| Air viscosity | | 1.78 × 10−5 Ns/m2 |
| Predetermined parameters | Design thrust | | 2800 N |
| Propeller diameter | | 2 m |
| Blades number | | 5 |
| Revolution speed | | 1200 rpm |
| Airfoil for blade cross-section | - | ARA-D |
| Design variables | Chord length distribution | | - |
| Pitch angle distribution | | - |
| Optimization objective | TPR | | - |
Table 5.
Design variables range defined and optimization results for the upper propeller in original CRP.
Table 5.
Design variables range defined and optimization results for the upper propeller in original CRP.
| r/R | Variables Ranges | Optimization Results |
|---|
| Chord Length [m] | Pitch Angle | Chord Length [m] | Pitch Angle |
|---|
| 0.235 | 0.15~0.25 | 22°~35° | 0.2 | 26.85° |
| 0.5 | 0.2~0.35 | 15°~25° | 0.26 | 18.9° |
| 0.8 | 0.15~0.25 | 10°~20° | 0.184 | 12.9° |
| 1 | 0.05~0.15 | 3°~10° | 0.075 | 4.58° |
Table 6.
The blade shape optimization parameters and conditions for the optimized CRP.
Table 6.
The blade shape optimization parameters and conditions for the optimized CRP.
| Optimized CRP | Upper Propeller | Lower Propeller |
|---|
| Design thrust | 2800 N |
| Revolution speed | 1200 rpm |
| Diameter | 2 m |
| Optimization conditions | Hovering status | Wake of the upper |
Table 7.
Design variable range definition and optimization result of the lower propeller in the optimized CRP.
Table 7.
Design variable range definition and optimization result of the lower propeller in the optimized CRP.
| r/R | Variables Ranges | Optimization Results |
|---|
| Chord Length [m] | Pitch Angle | Chord Length [m] | Pitch Angle |
|---|
| 0.235 | 0.1~0.25 | 35°~60° | 0.14 | 50.3° |
| 0.5 | 0.1~0.35 | 20°~50° | 0.18 | 34.38° |
| 0.8 | 0.08~0.25 | 15°~30° | 0.12 | 25.95° |
| 1 | 0.03~0.15 | 5°~15° | 0.04 | 10.7° |
Table 8.
Upper and lower propeller revolution speed allocations for the optimized CRP at 5600 N level thrust.
Table 8.
Upper and lower propeller revolution speed allocations for the optimized CRP at 5600 N level thrust.
Case
Number | Upper Revolution Speed [rpm] | Upper Torque [Nm] | Lower Revolution Speed [rpm] | Lower Torque [Nm] | Total Thrust [N] | TPR [N/kW] | nupper/nlower |
|---|
| 1 | 1532.00 | 738.71 | 935.00 | 533.17 | 5599.86 | 32.80 | 1.64 |
| 2 | 1507.00 | 712.67 | 960.00 | 576.15 | 5608.13 | 32.91 | 1.57 |
| 3 | 1484.00 | 689.19 | 980.00 | 610.61 | 5604.18 | 33.01 | 1.51 |
| 4 | 1467.21 | 660.00 | 1000.00 | 643.70 | 5607.73 | 33.22 | 1.47 |
| 5 | 1442.60 | 648.00 | 1015.00 | 670.50 | 5592.45 | 33.06 | 1.42 |
| 6 | 1425.25 | 630.54 | 1034.00 | 701.87 | 5607.16 | 32.96 | 1.38 |
| 7 | 1386.20 | 592.32 | 1067.00 | 760.91 | 5612.49 | 32.82 | 1.30 |
| 8 | 1368.63 | 573.75 | 1080.00 | 787.59 | 5606.54 | 32.73 | 1.27 |
| 9 | 1344.18 | 551.53 | 1100.00 | 821.58 | 5608.82 | 32.56 | 1.22 |
| 10 | 1305.95 | 516.10 | 1125.00 | 869.44 | 5590.09 | 32.31 | 1.16 |
| 11 | 1264.20 | 488.25 | 1150.00 | 917.23 | 5608.83 | 32.03 | 1.10 |
| 12 | 1225.02 | 456.16 | 1175.00 | 967.13 | 5612.48 | 31.62 | 1.04 |
| 13 | 1200.00 | 425.00 | 1200.00 | 1015.87 | 5666.73 | 31.56 | 1.00 |
| 14 | 1164.00 | 359.28 | 1225.00 | 1067.60 | 5604.18 | 31.01 | 0.95 |
| 15 | 1061.88 | 320.67 | 1250.00 | 1114.83 | 5610.01 | 30.89 | 0.85 |
| 16 | 993.15 | 282.41 | 1275.00 | 1157.37 | 5621.48 | 30.57 | 0.78 |
Table 9.
TPR comparison (at 5600 N thrust) of the original CRP and optimized CRP (equal revolution speed of Case 13, and trimmed revolution speed of Case 4).
Table 9.
TPR comparison (at 5600 N thrust) of the original CRP and optimized CRP (equal revolution speed of Case 13, and trimmed revolution speed of Case 4).
| Propulsion Unit | TPR at 5600 N [N/kW] |
|---|
| Original CRP | 29.80 |
| Optimized CRP (equal revolution speed) | 31.56 |
| Optimized CRP (trimmed revolution speed) | 33.22 |



 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}