
A Fast Aerodynamic Model for Aircraft Multidisciplinary Design and Optimization Process

Abstract
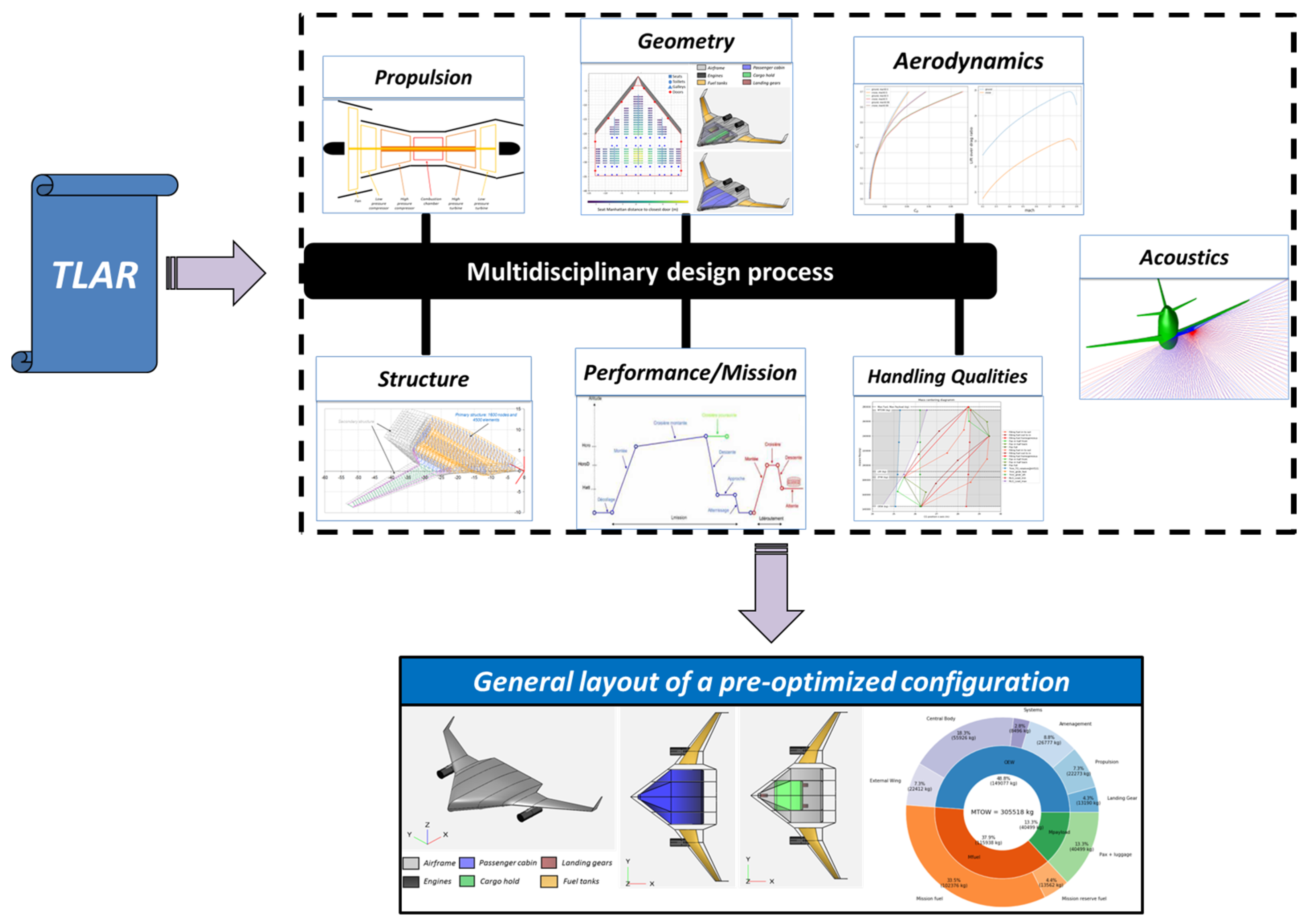
:1. Introduction
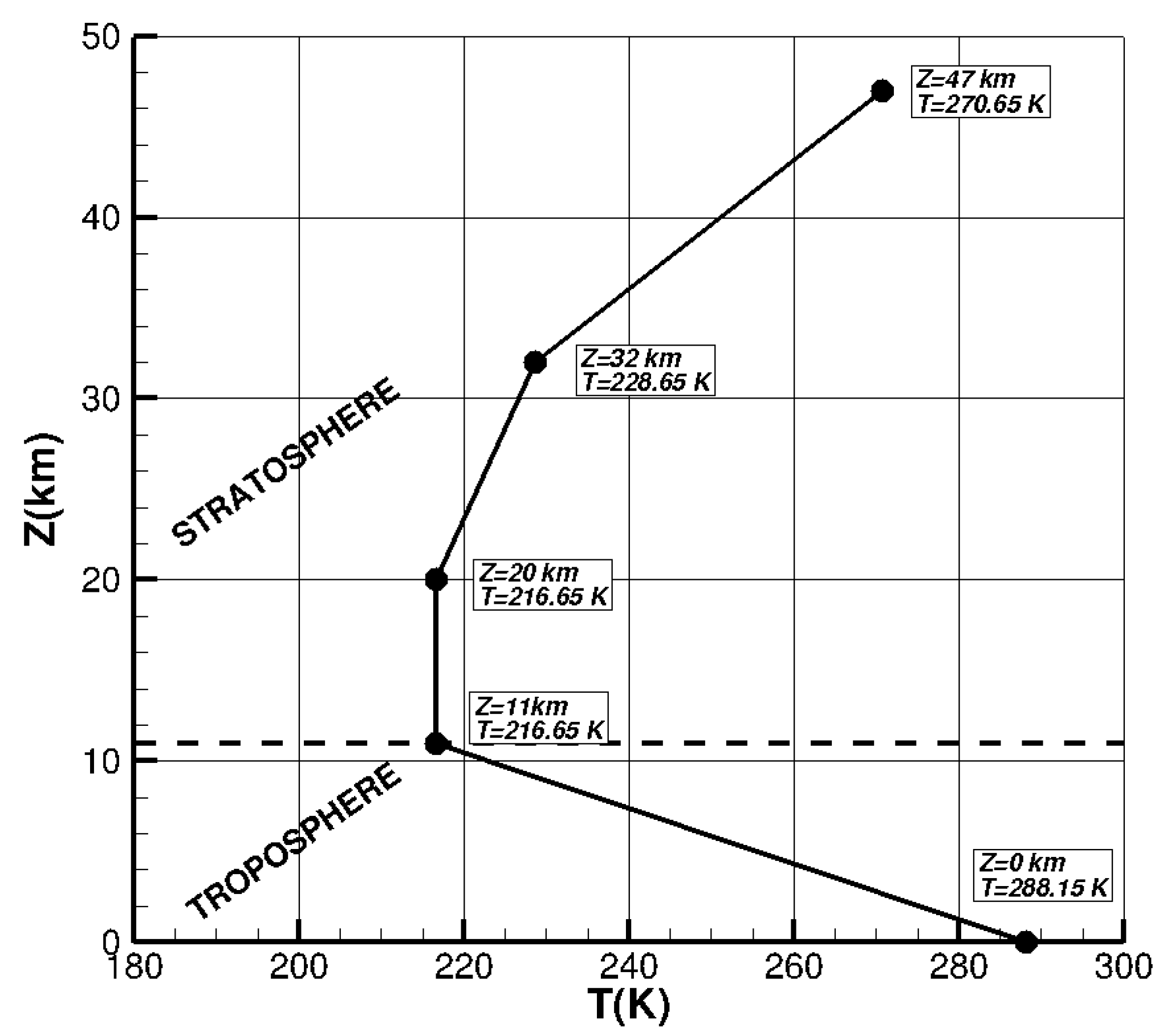
2. Standard Atmosphere Model
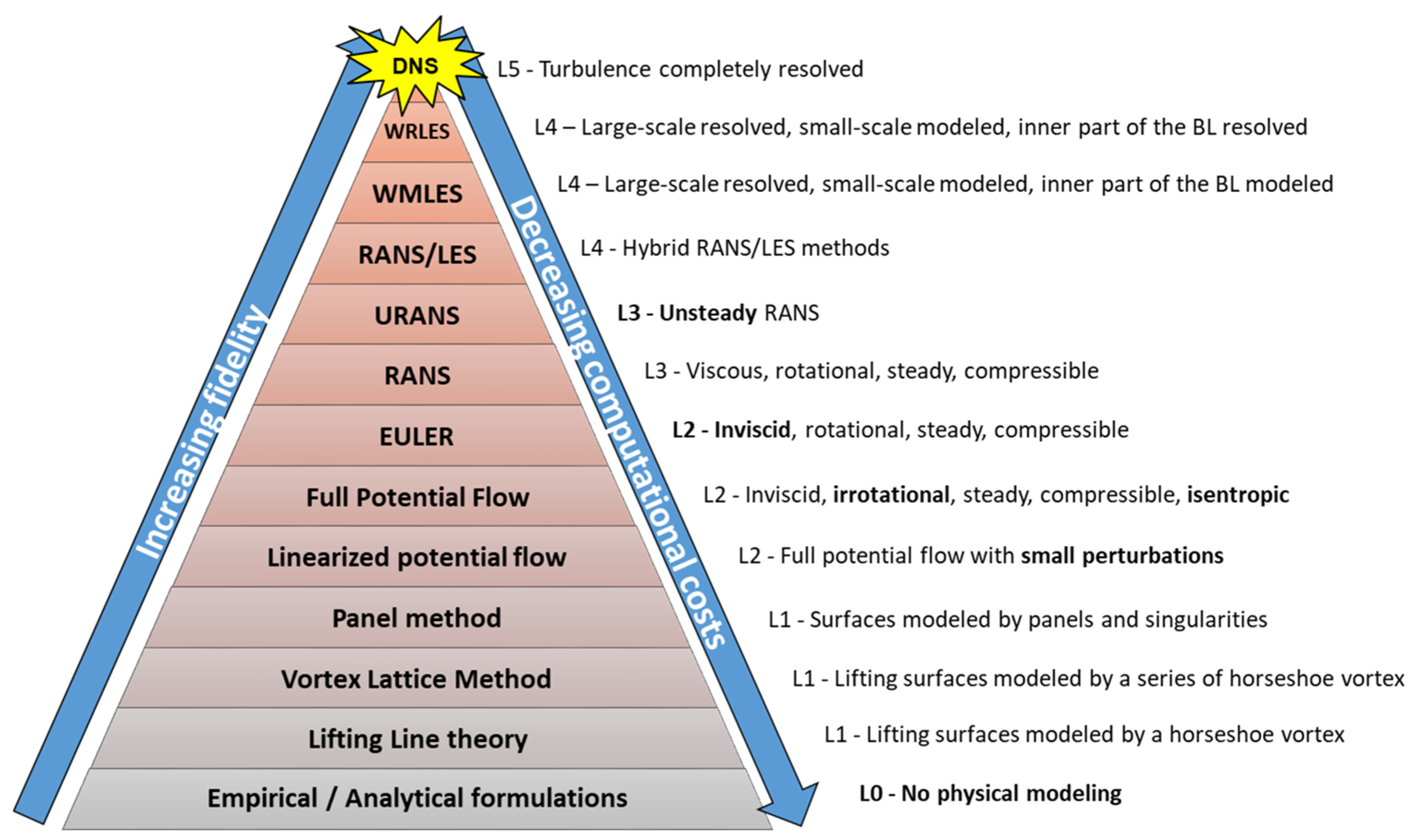
3. Aerodynamic Module
3.1. Geometrical Inputs
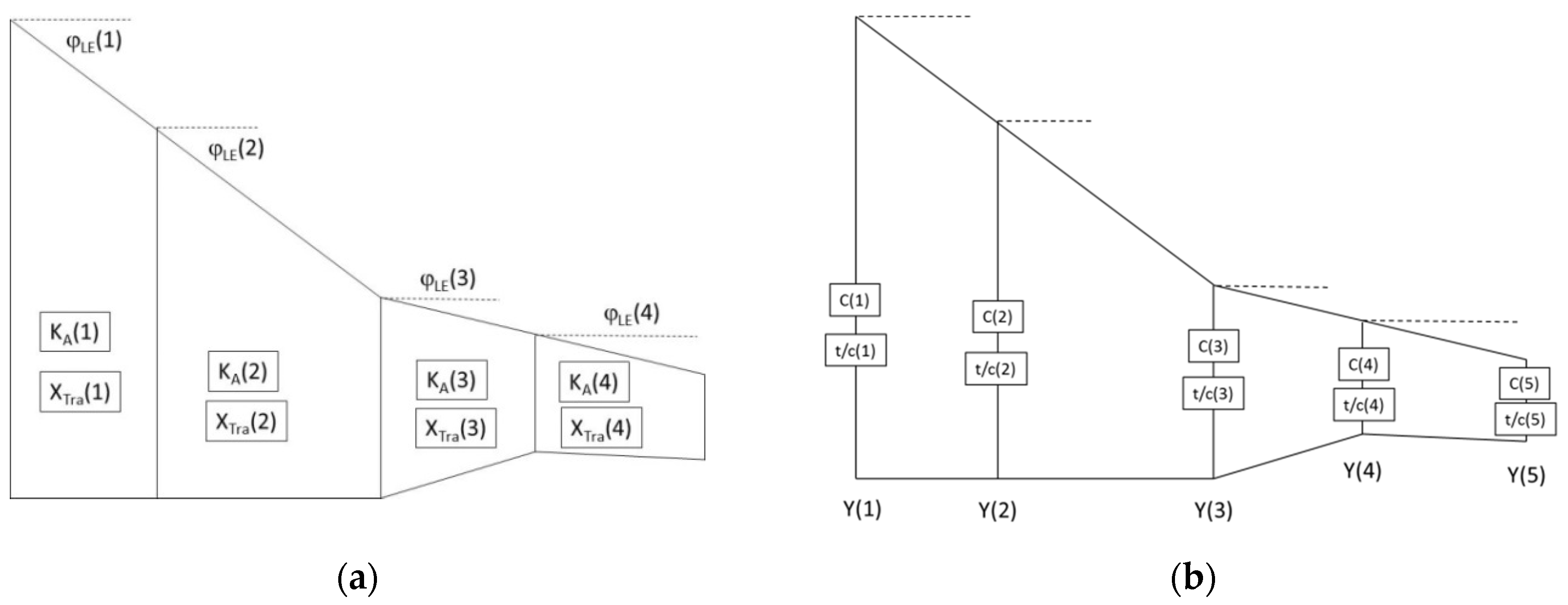
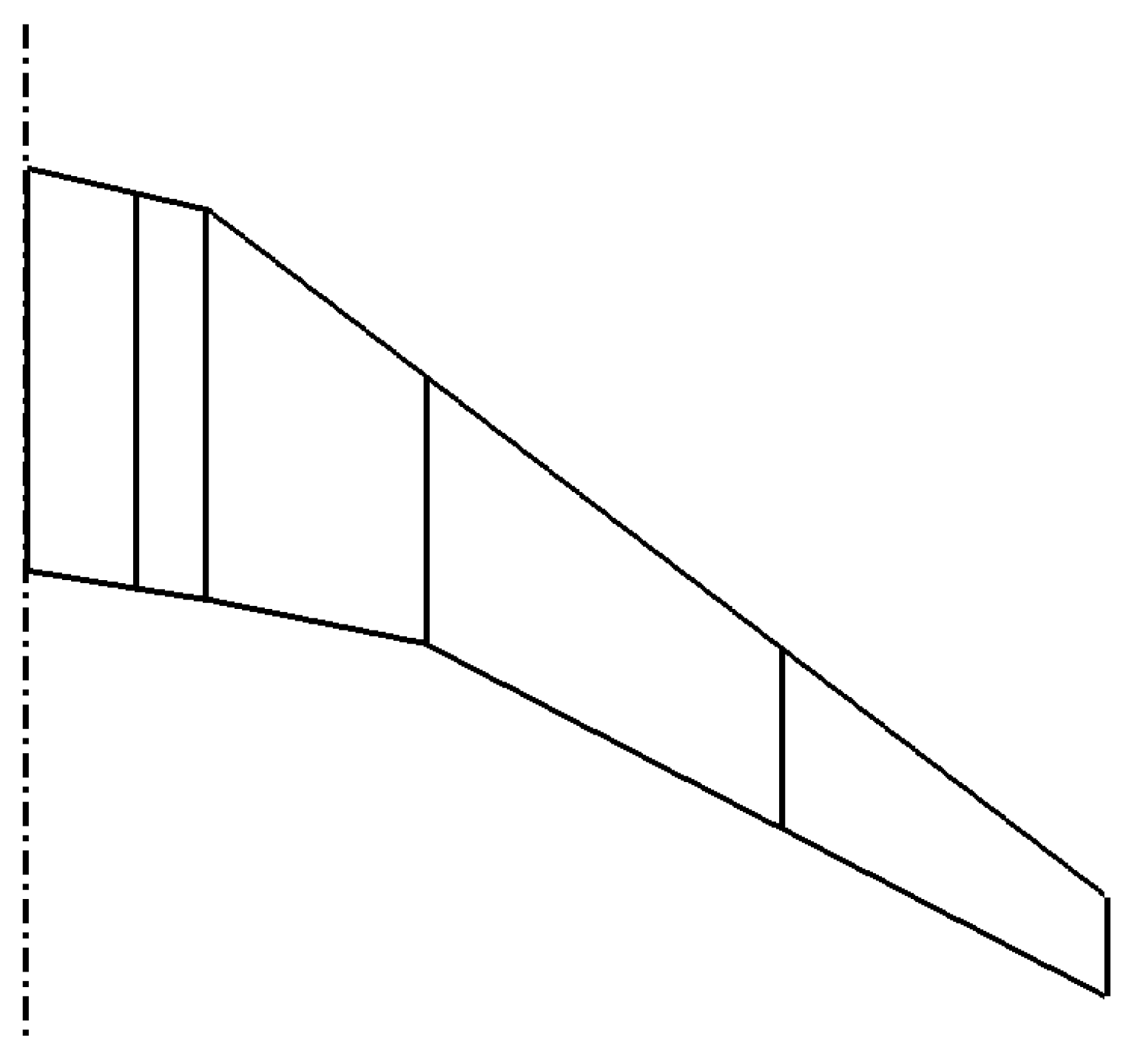
3.1.1. Wing
3.1.2. Fuselage
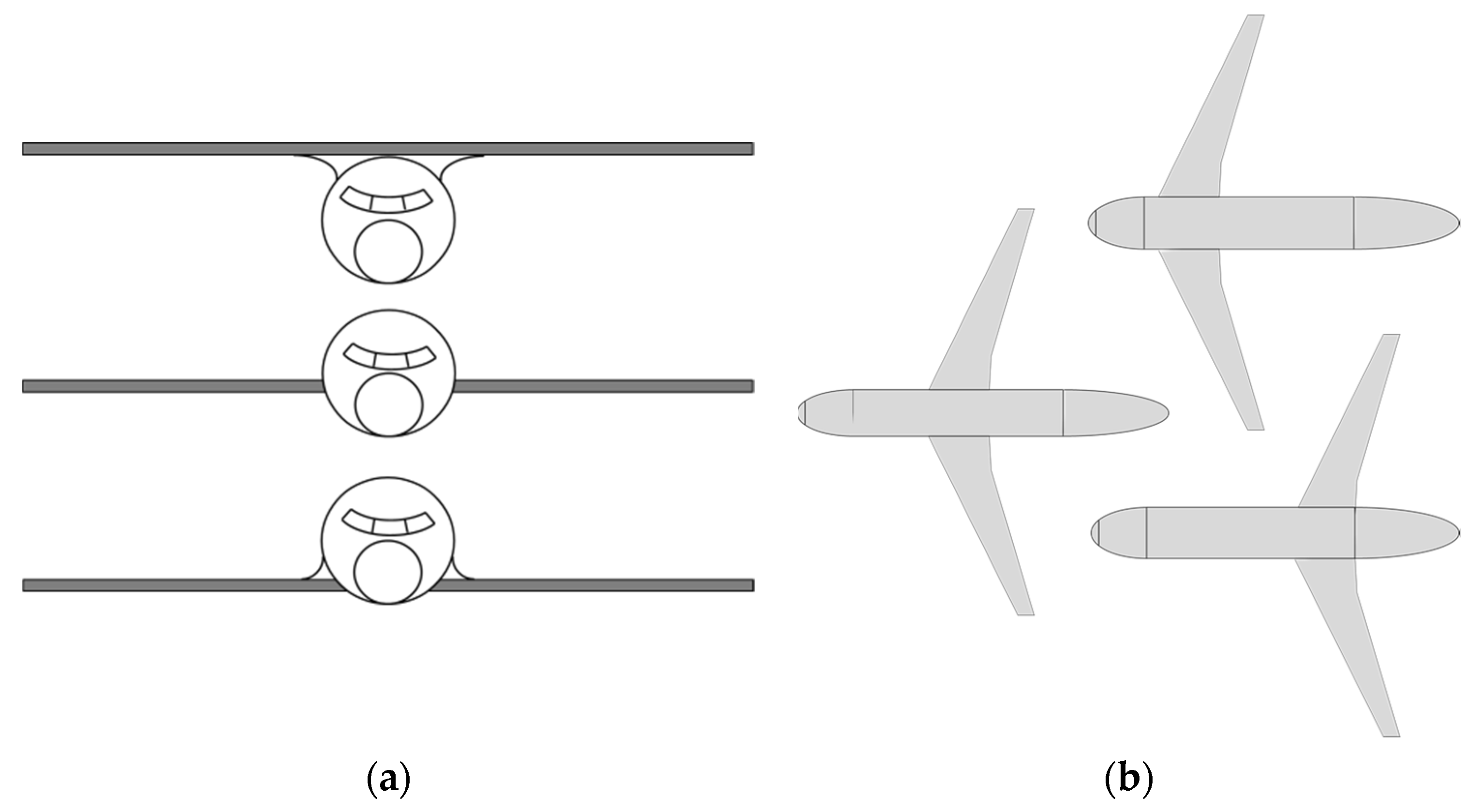
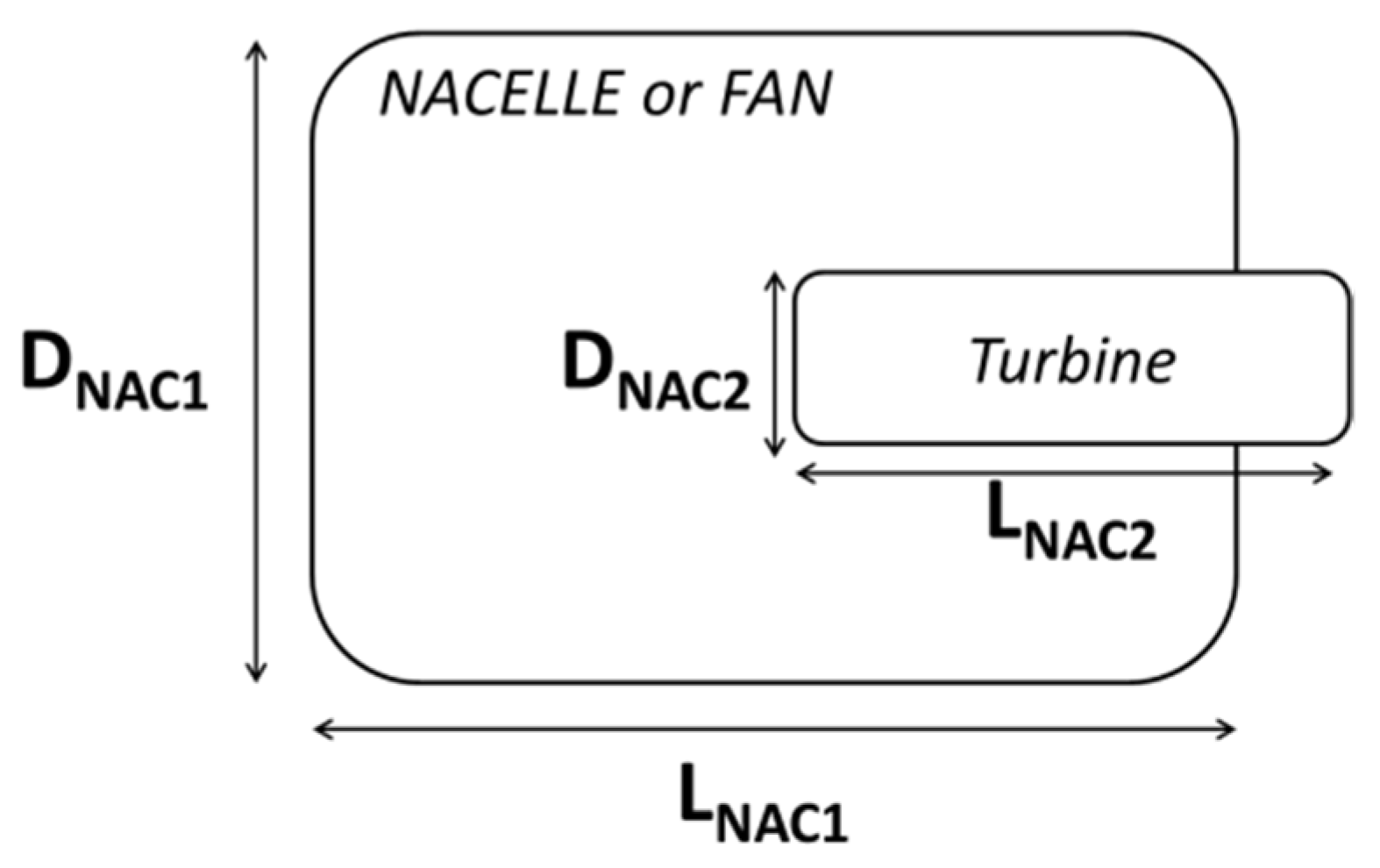
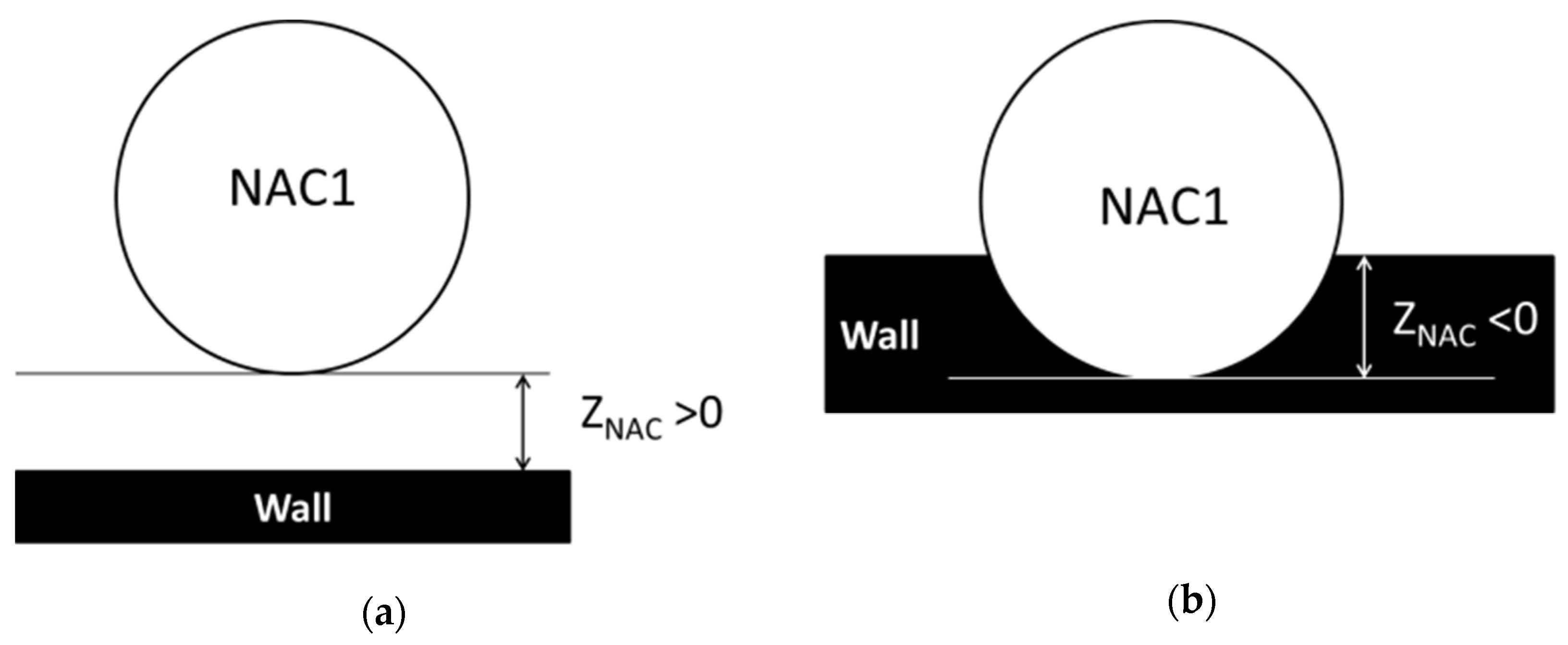
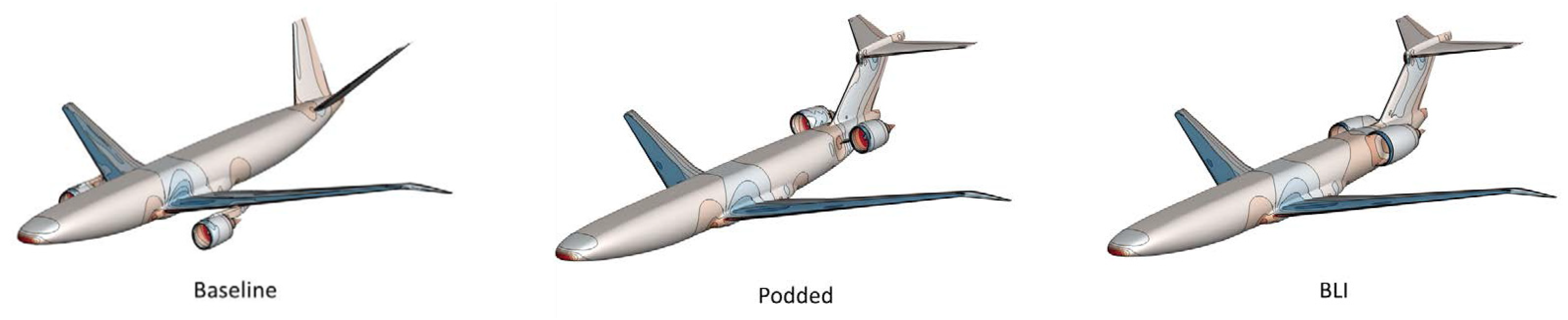
3.1.3. Nacelles
3.2. Formulation for Aircraft Lift
3.2.1. Estimation of Wing Maximum Lift
3.2.2. Lift Slope
3.3. Formulations for Aircraft Drag Evaluation
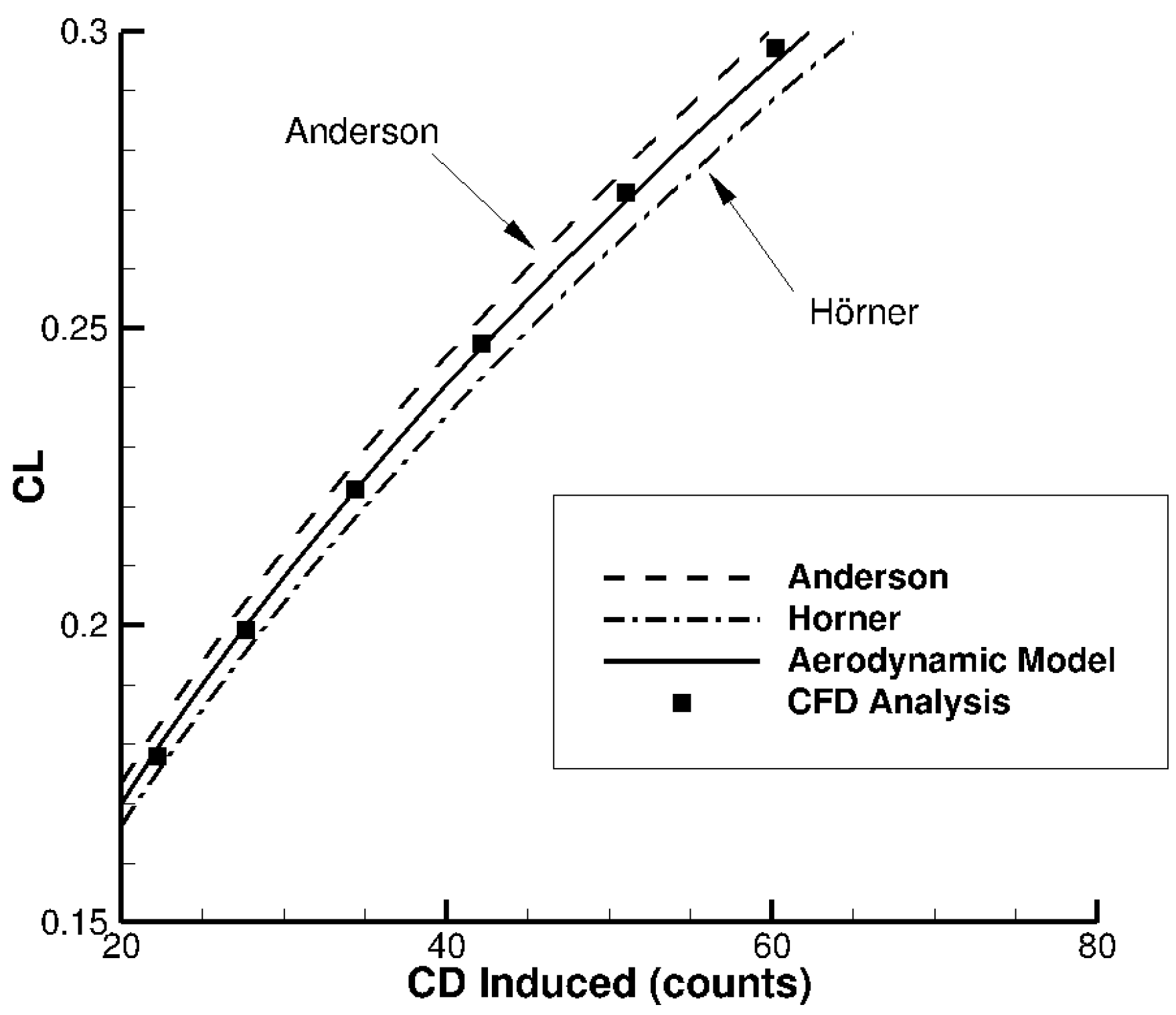
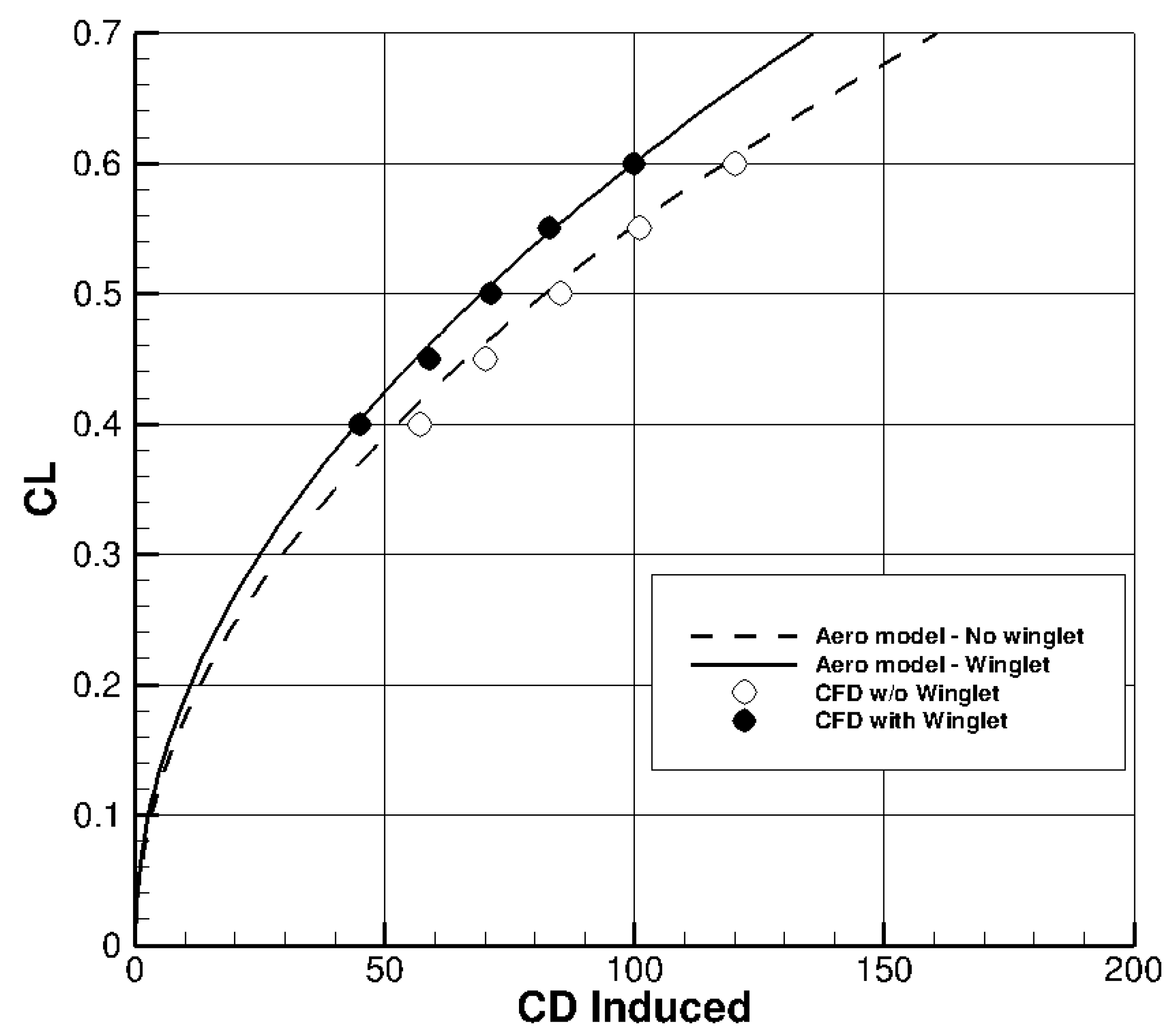
3.3.1. Lift-Induced Drag
3.3.2. Friction/Form Drag
- Friction coefficient CF
- Form Factors FF
3.3.3. Interaction Effects for Nacelles
3.4. Additional Drag Due to Lift
3.5. Wave Drag
3.6. Parasitic Drag
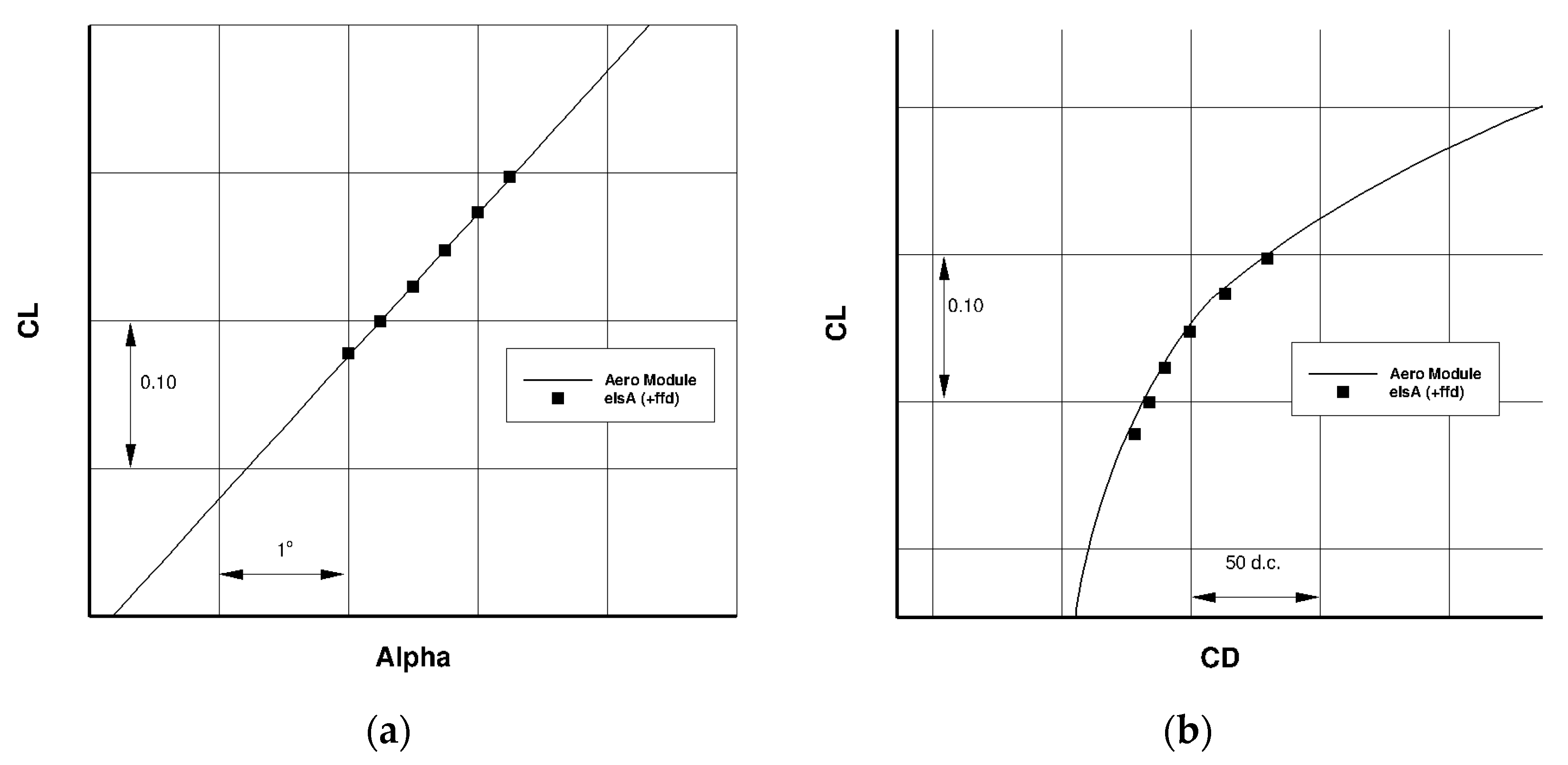
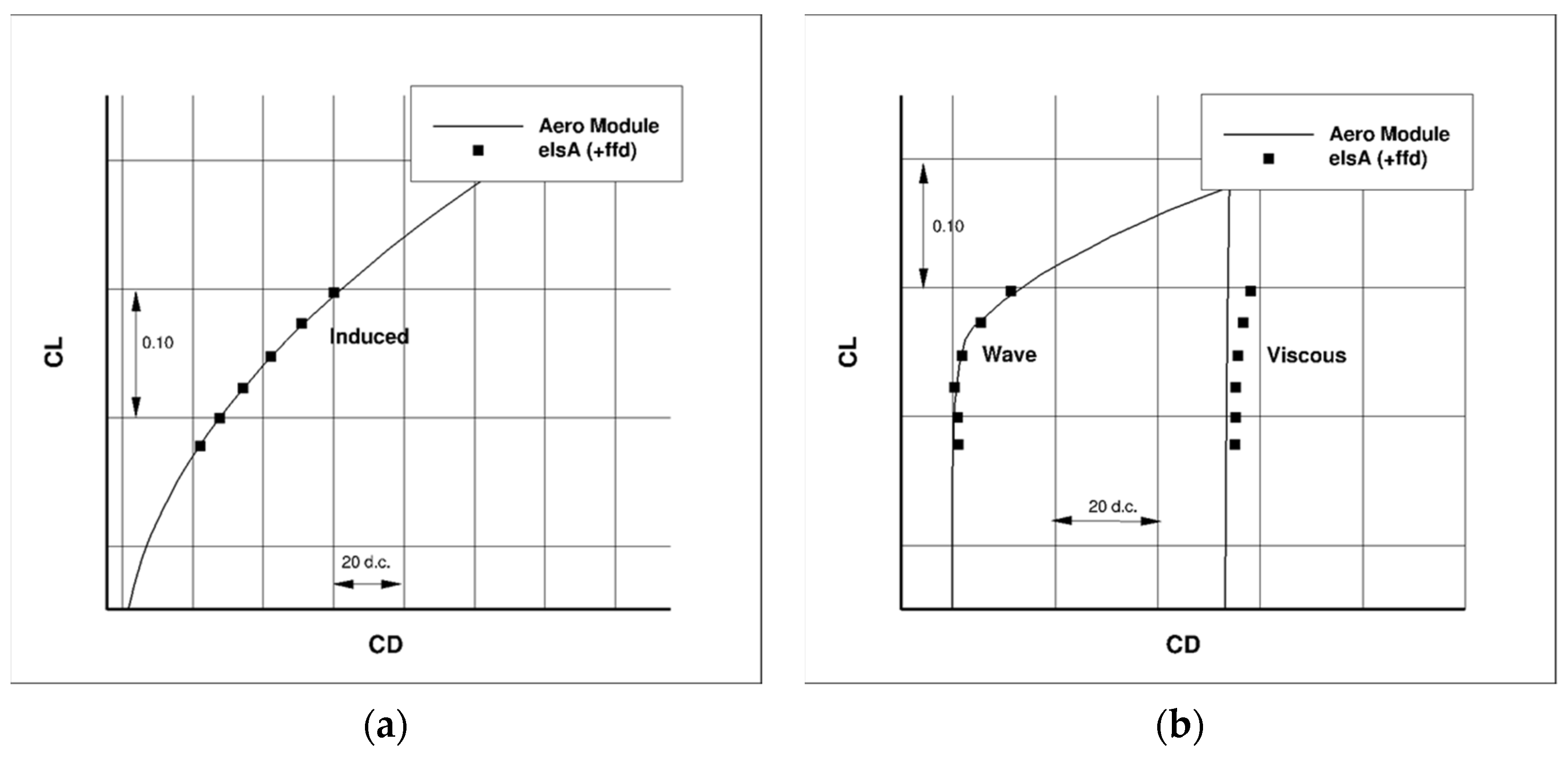
4. Module Validation
4.1. Standard Tube and Wing Configurations
4.1.1. ONERA NOVA Configuration
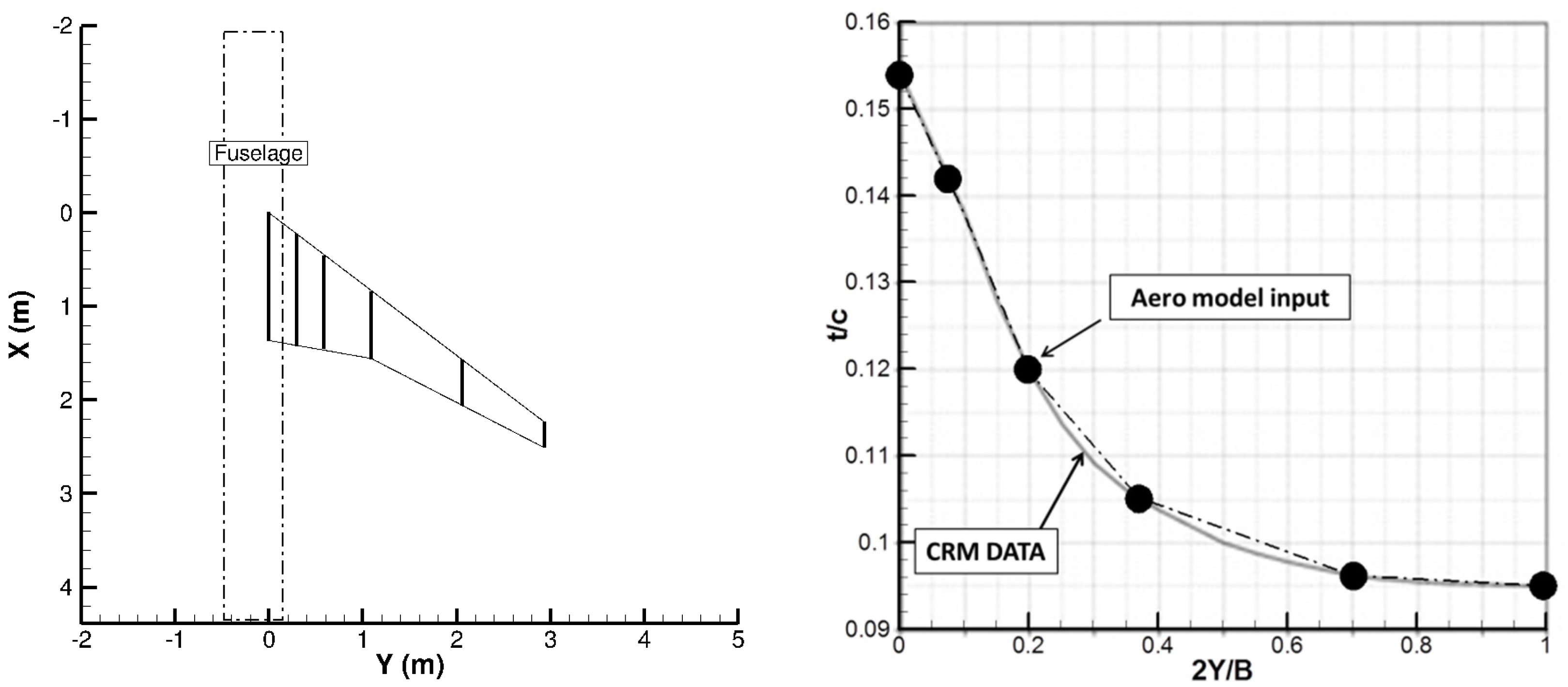
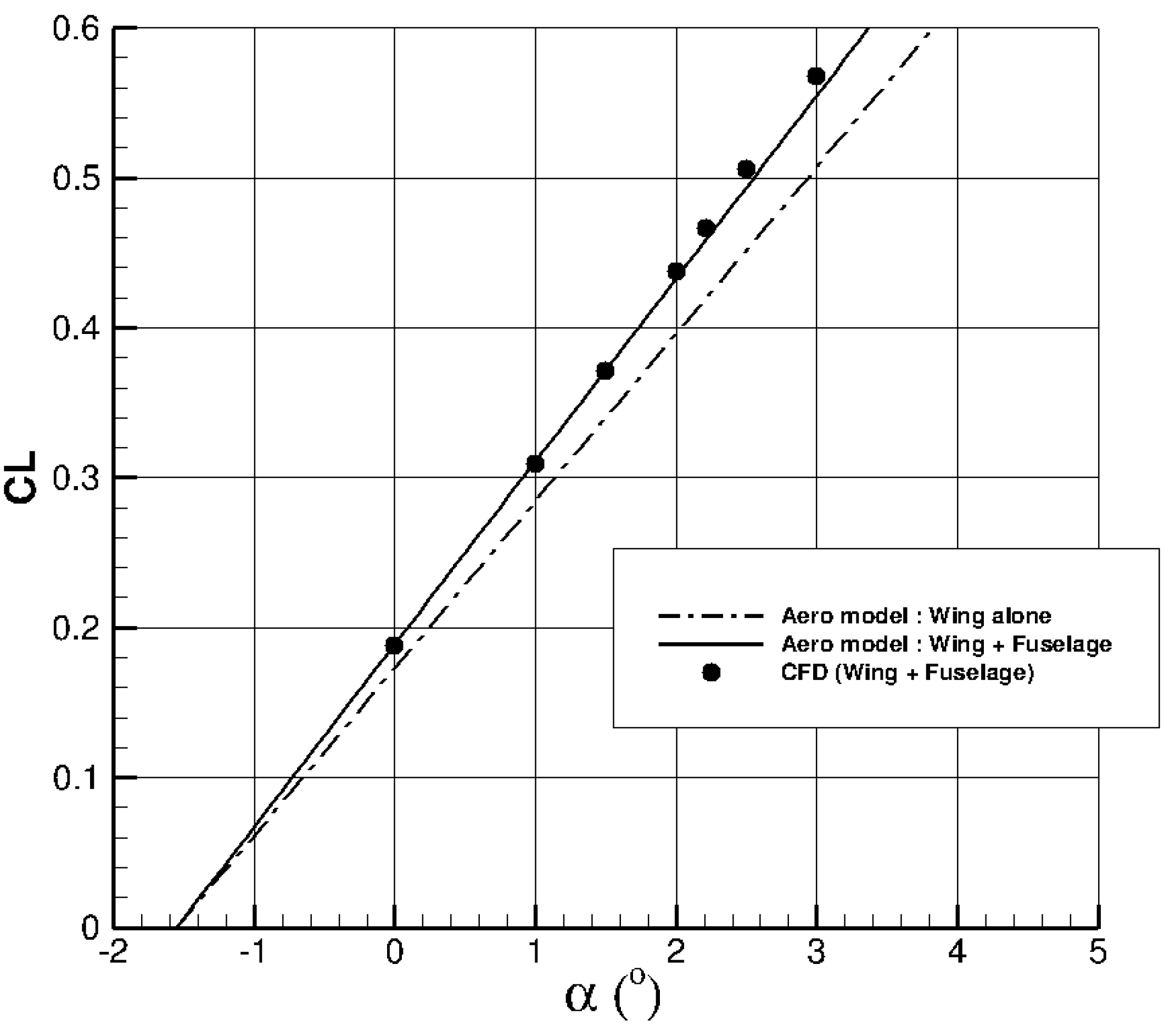
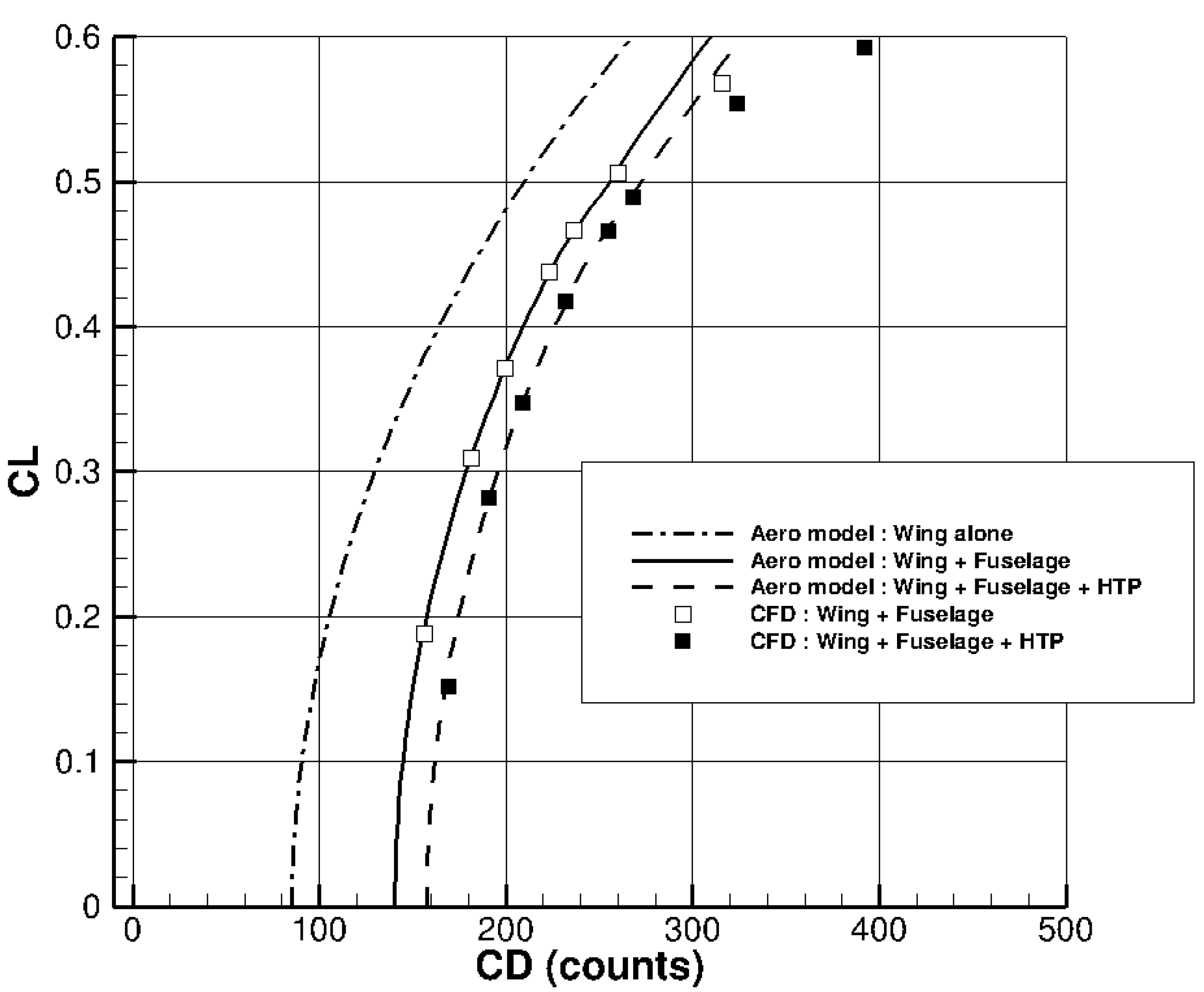
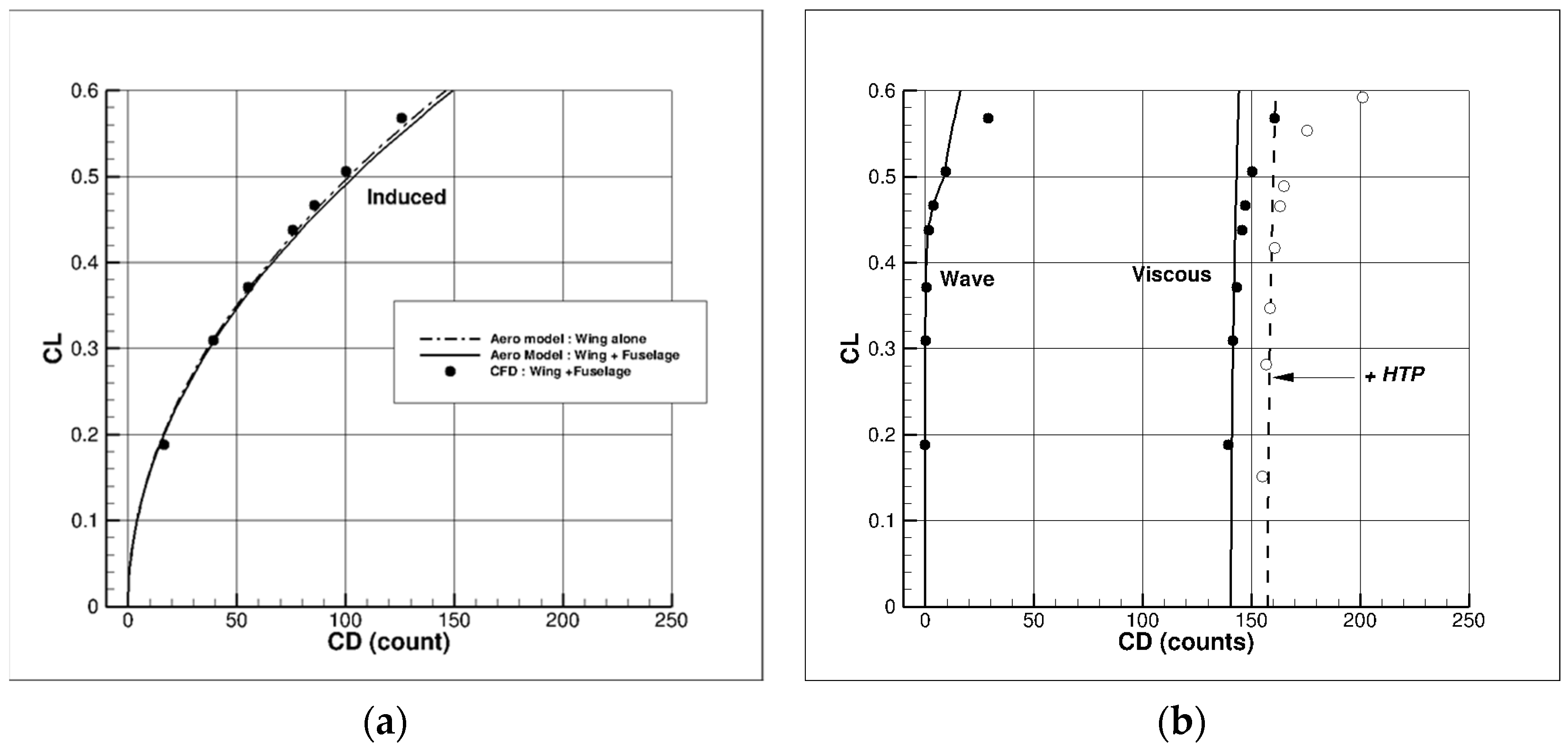
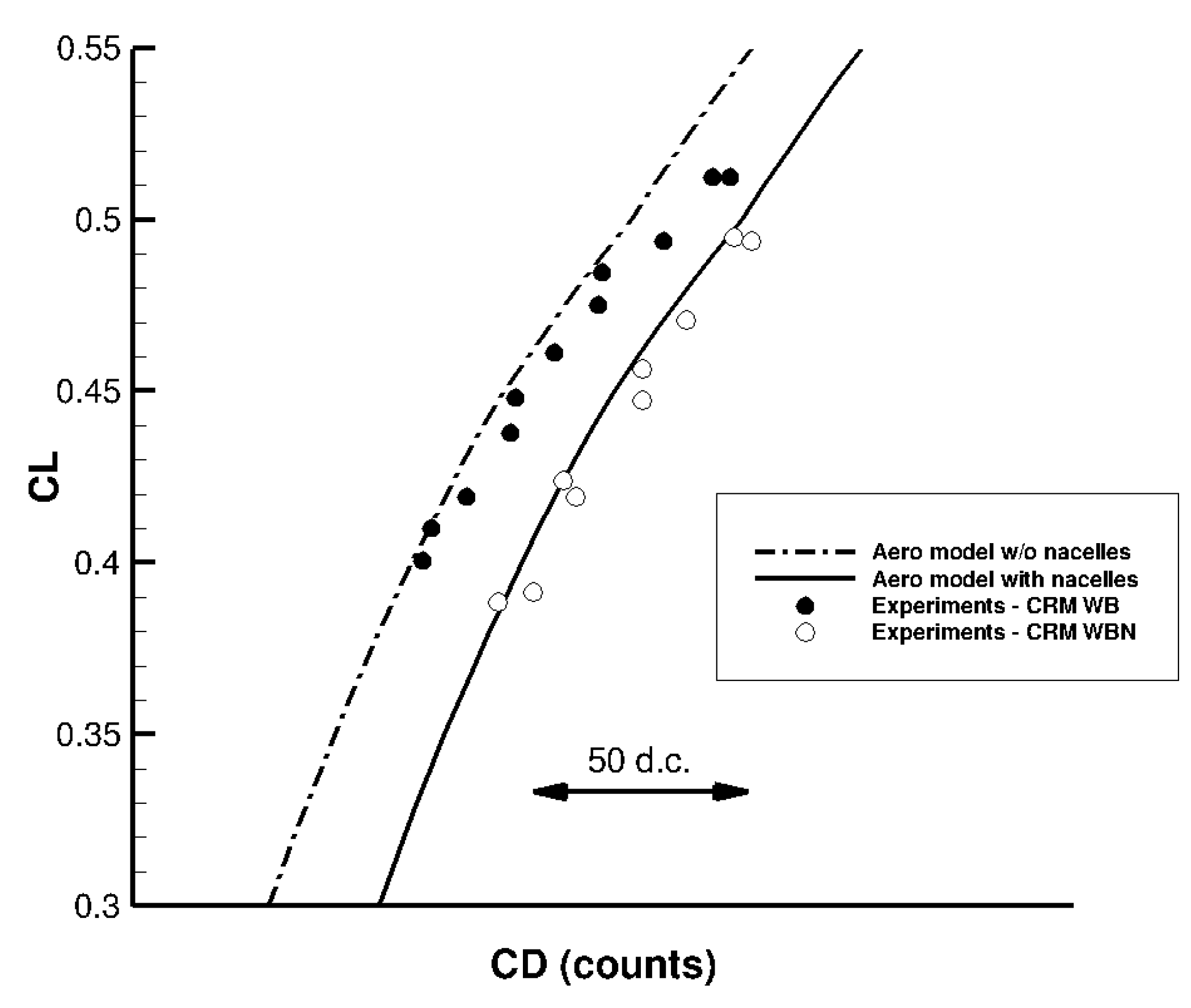
4.1.2. NASA Common Research Model (CRM)
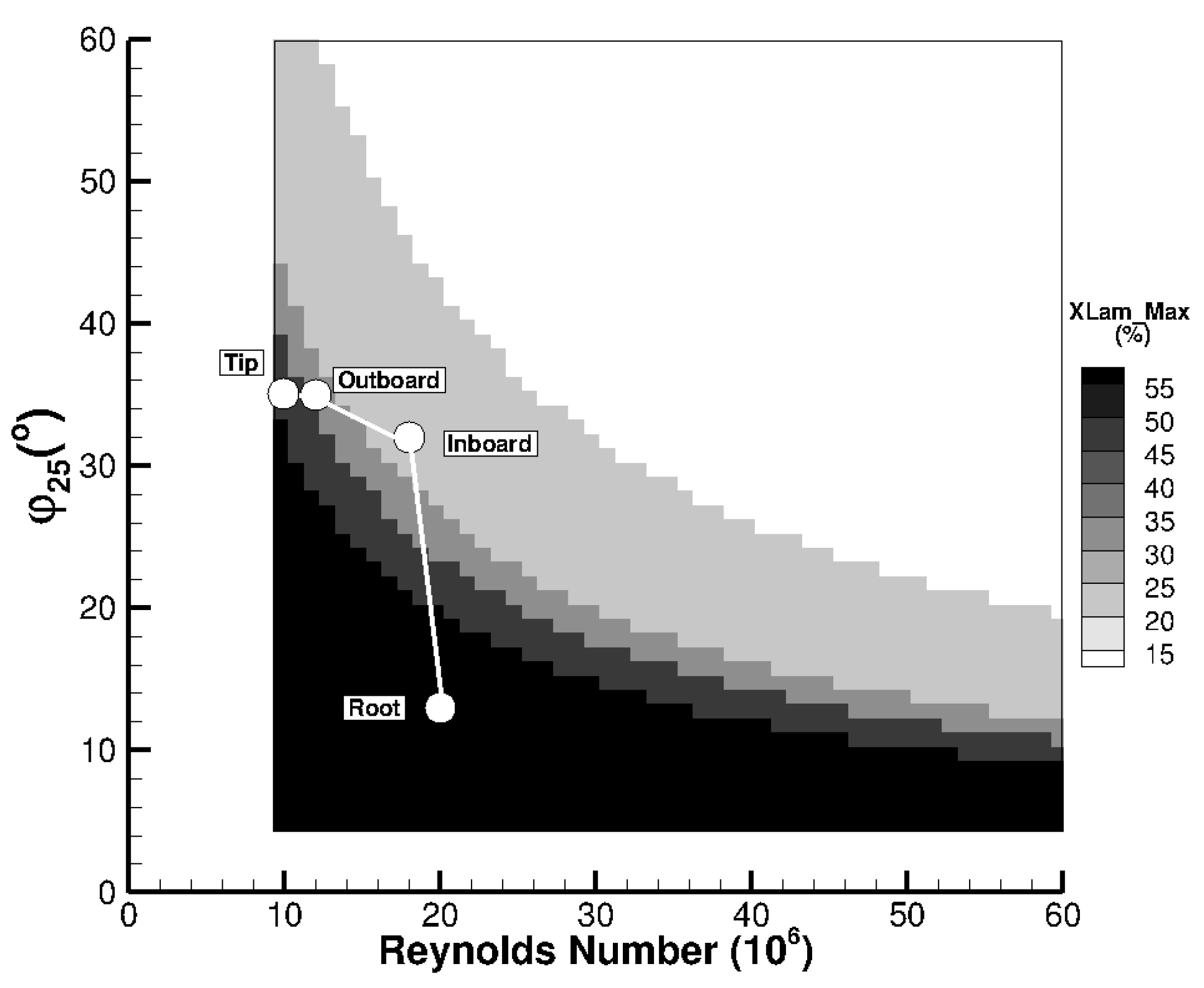
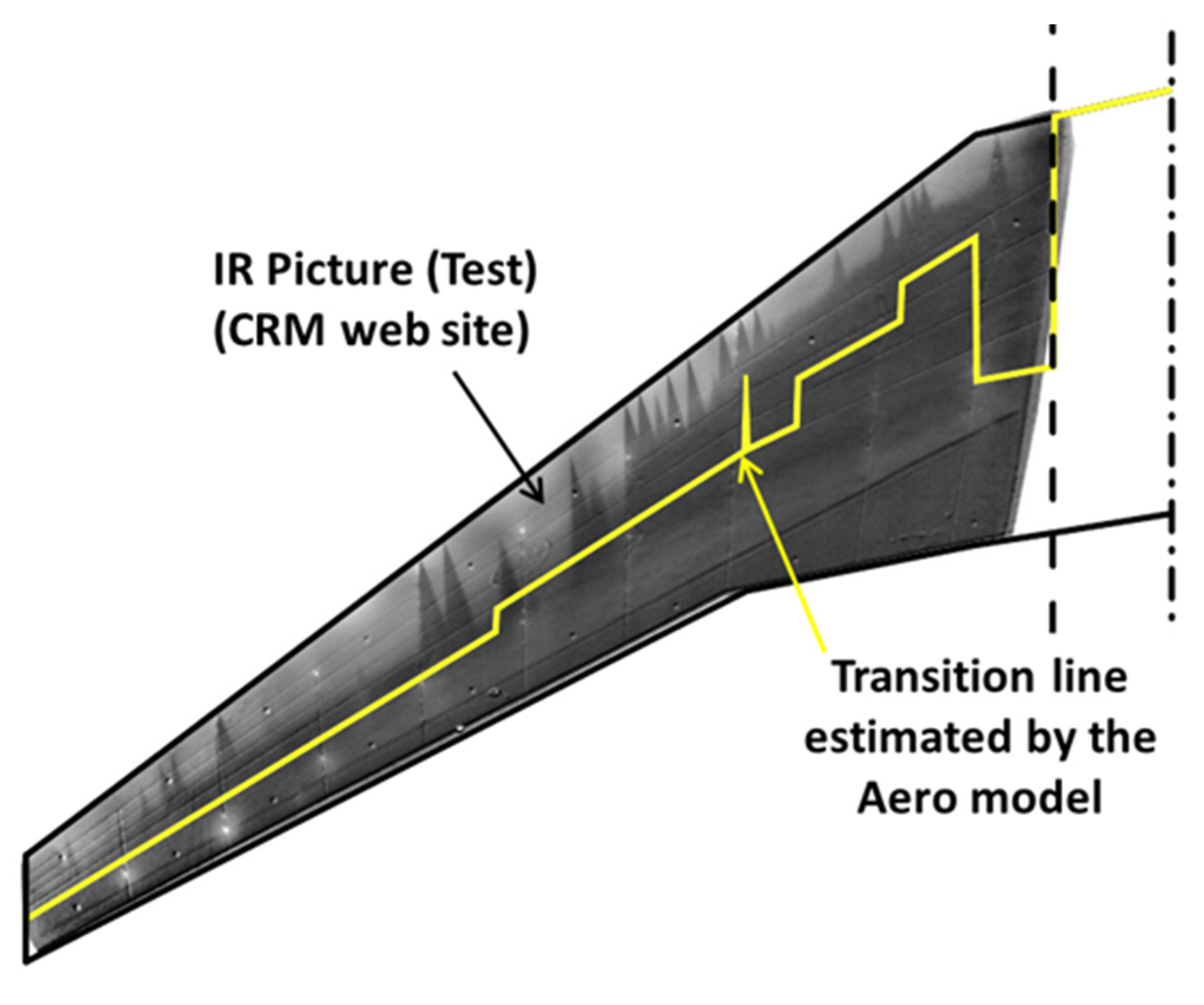
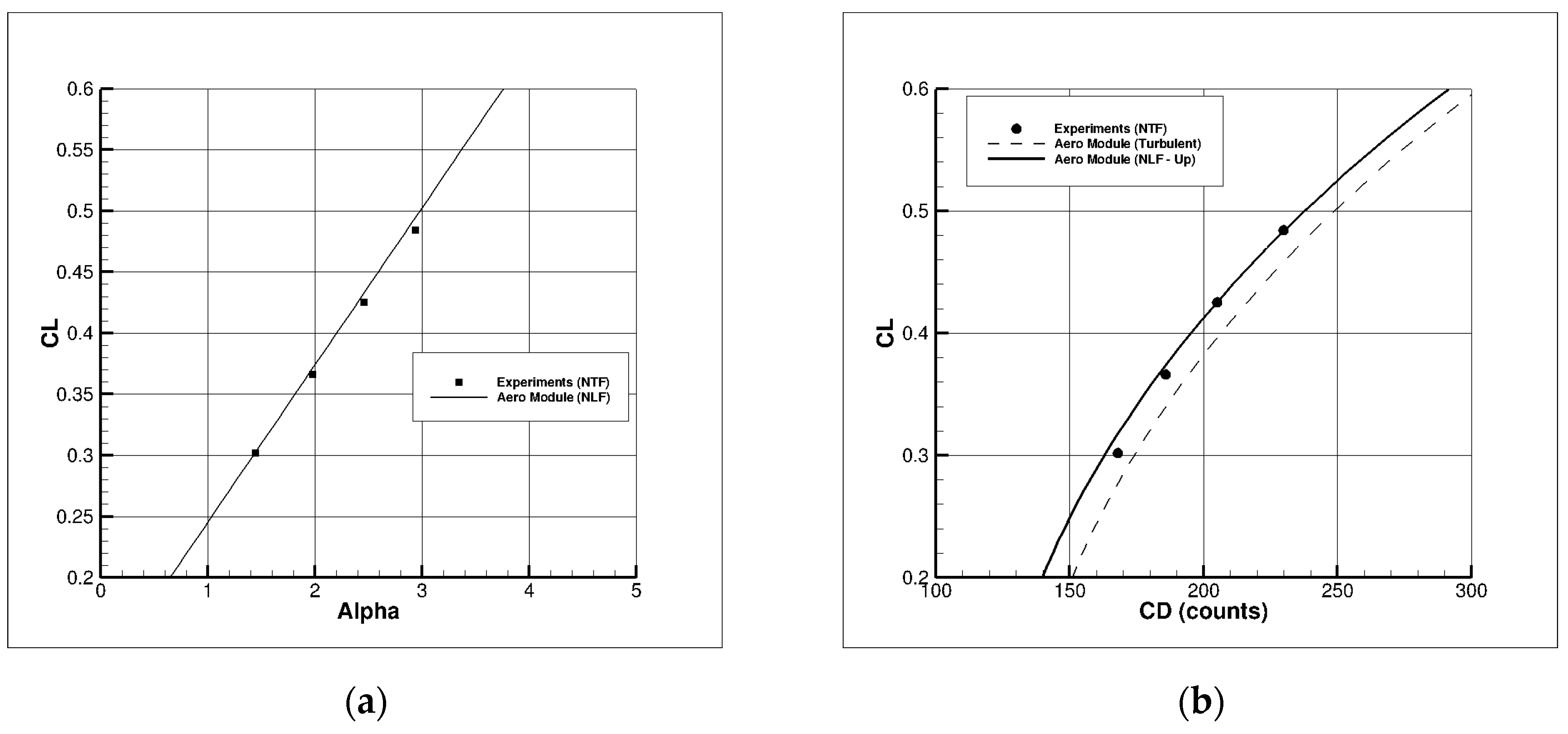
4.1.3. CRM-NLF Configuration
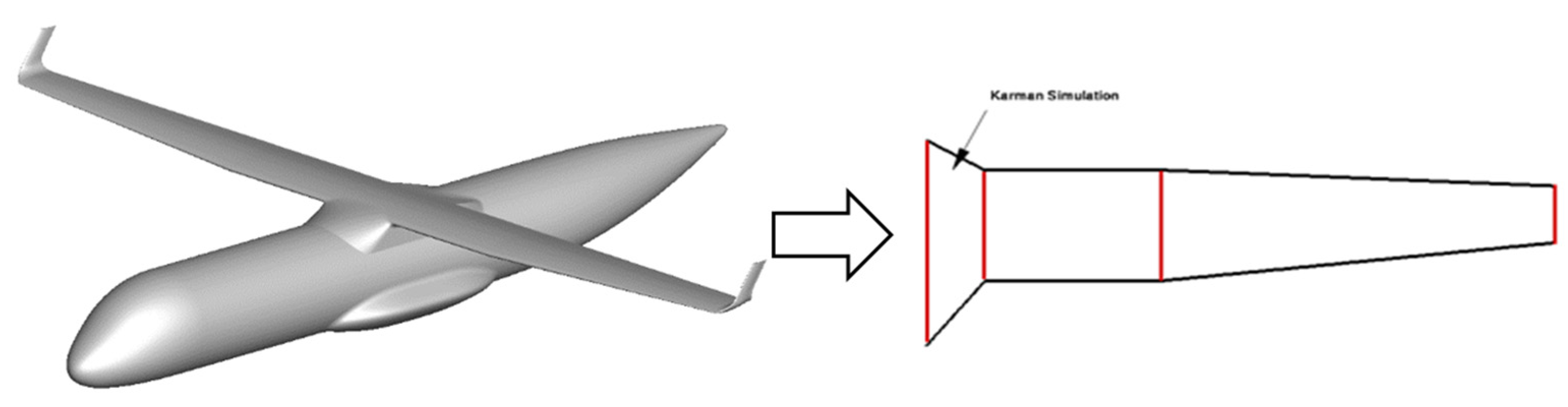
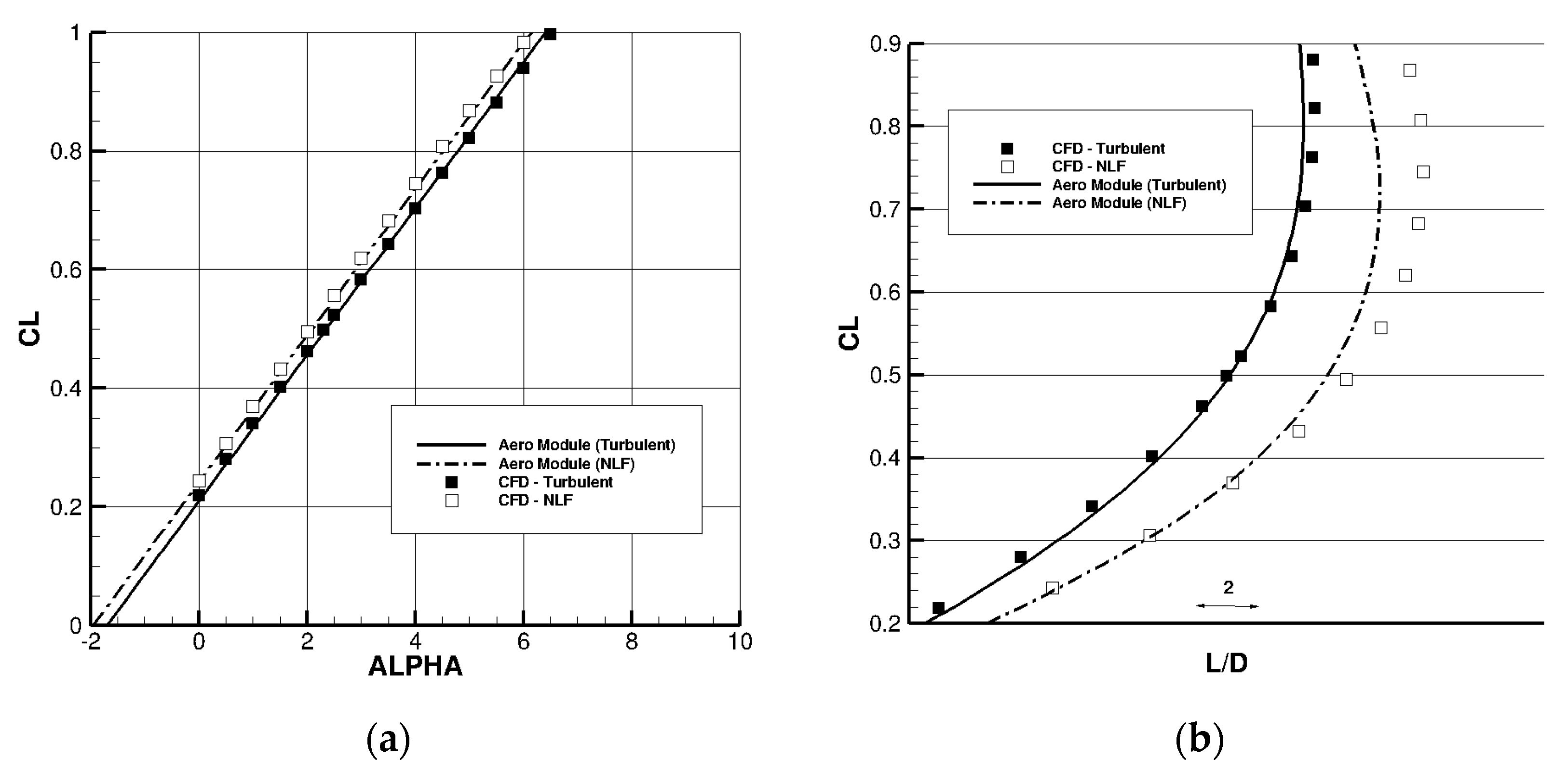
4.1.4. NLF Regional Aircraft Configuration
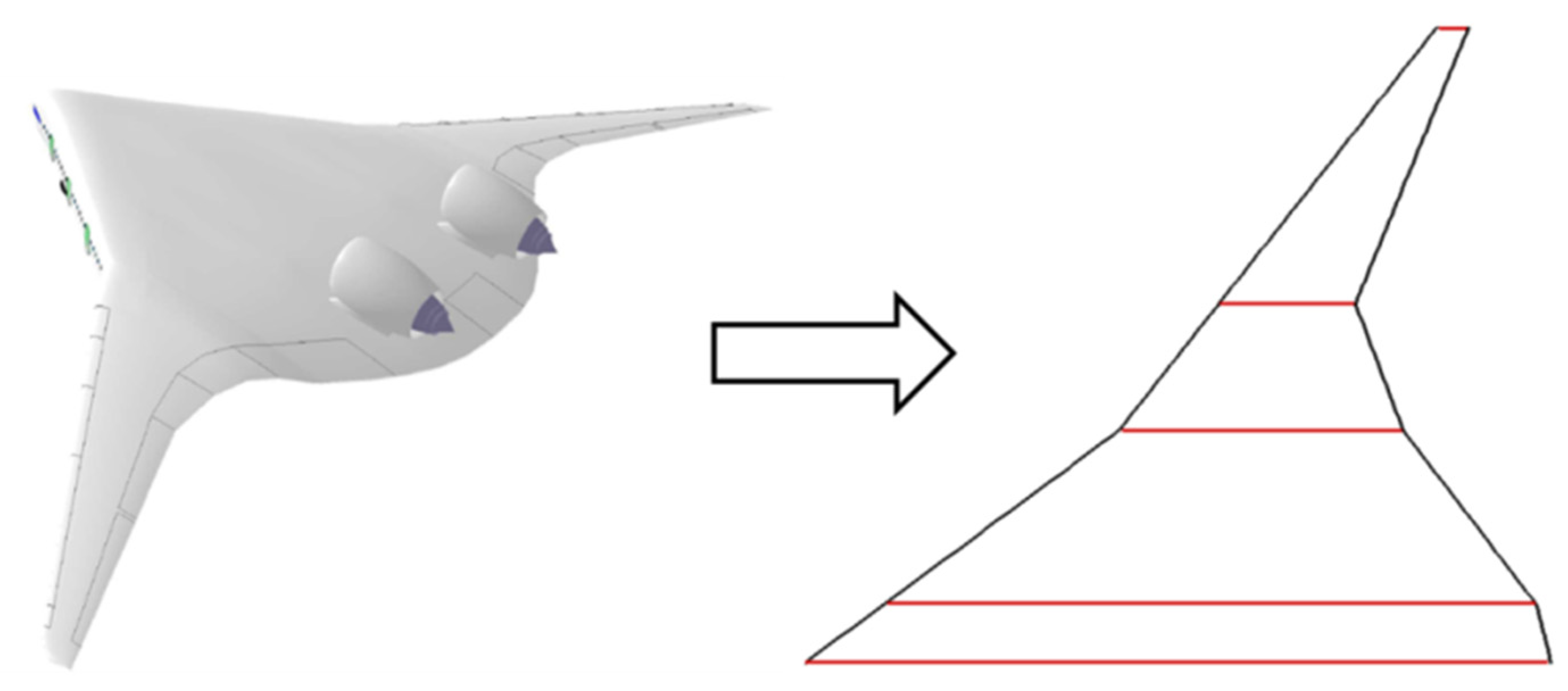
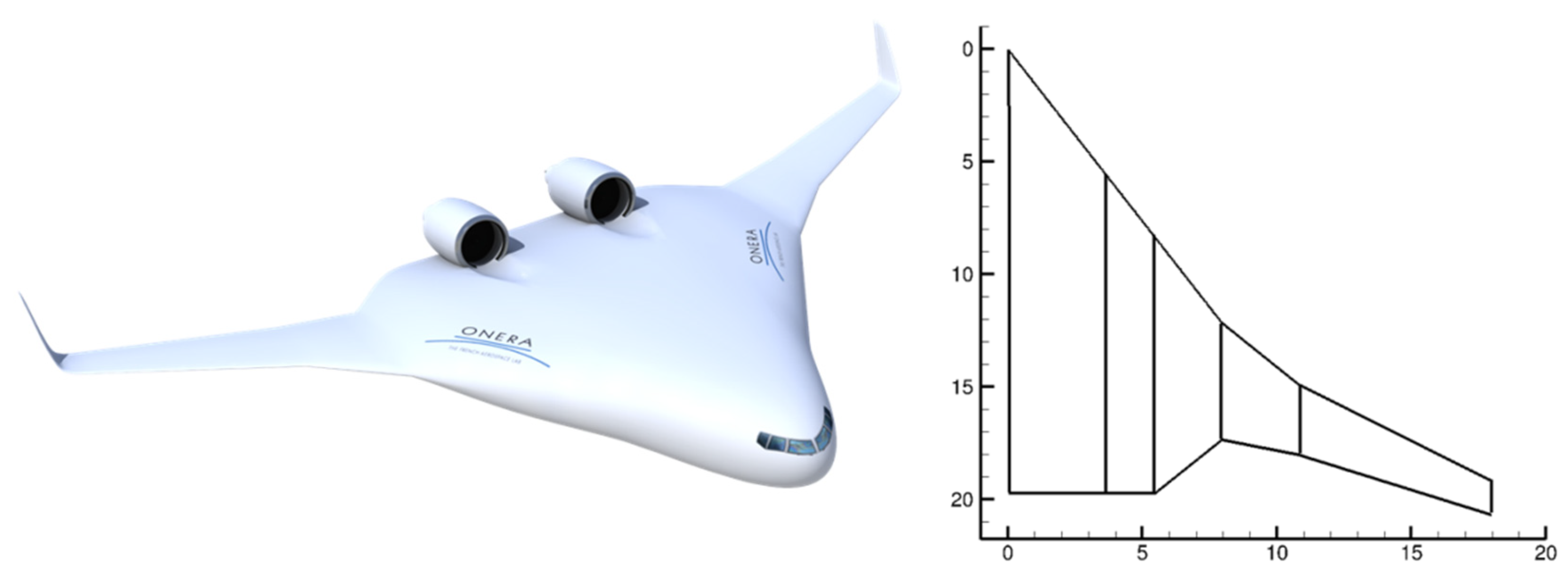
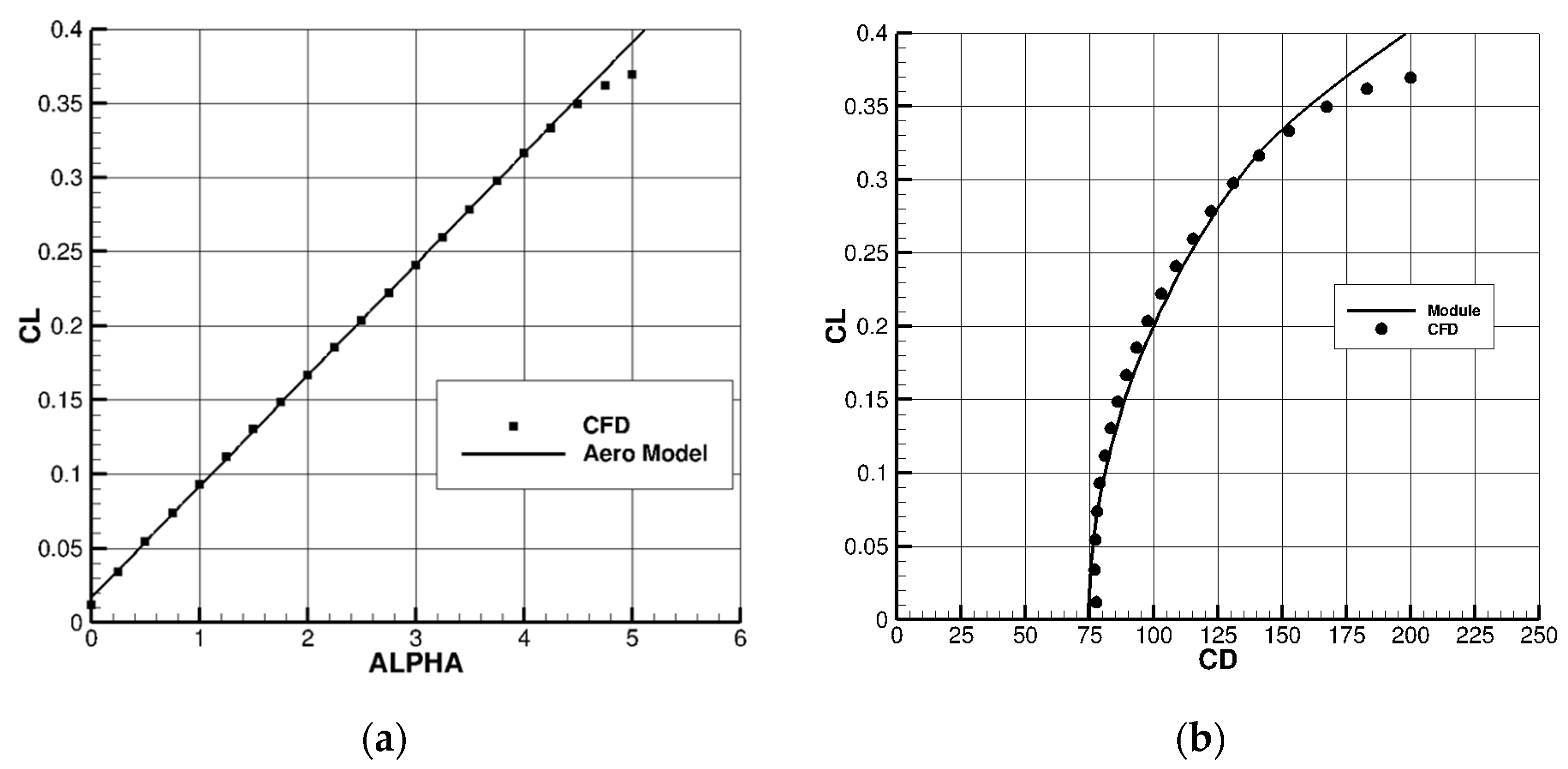
4.2. BWB Configurations
4.2.1. AVECA
4.2.2. NACOR-SMILE Configuration
5. Computing Performances
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| b | Wing span (m) |
| c | Airfoil chord (m) |
| d.c. | Drag count (CD × 104) |
| t | Airfoil thickness |
| z | Altitude (m or km) |
| P | Pressure (Pa) |
| T | Temperature (K) |
| V | Velocity (m/s) |
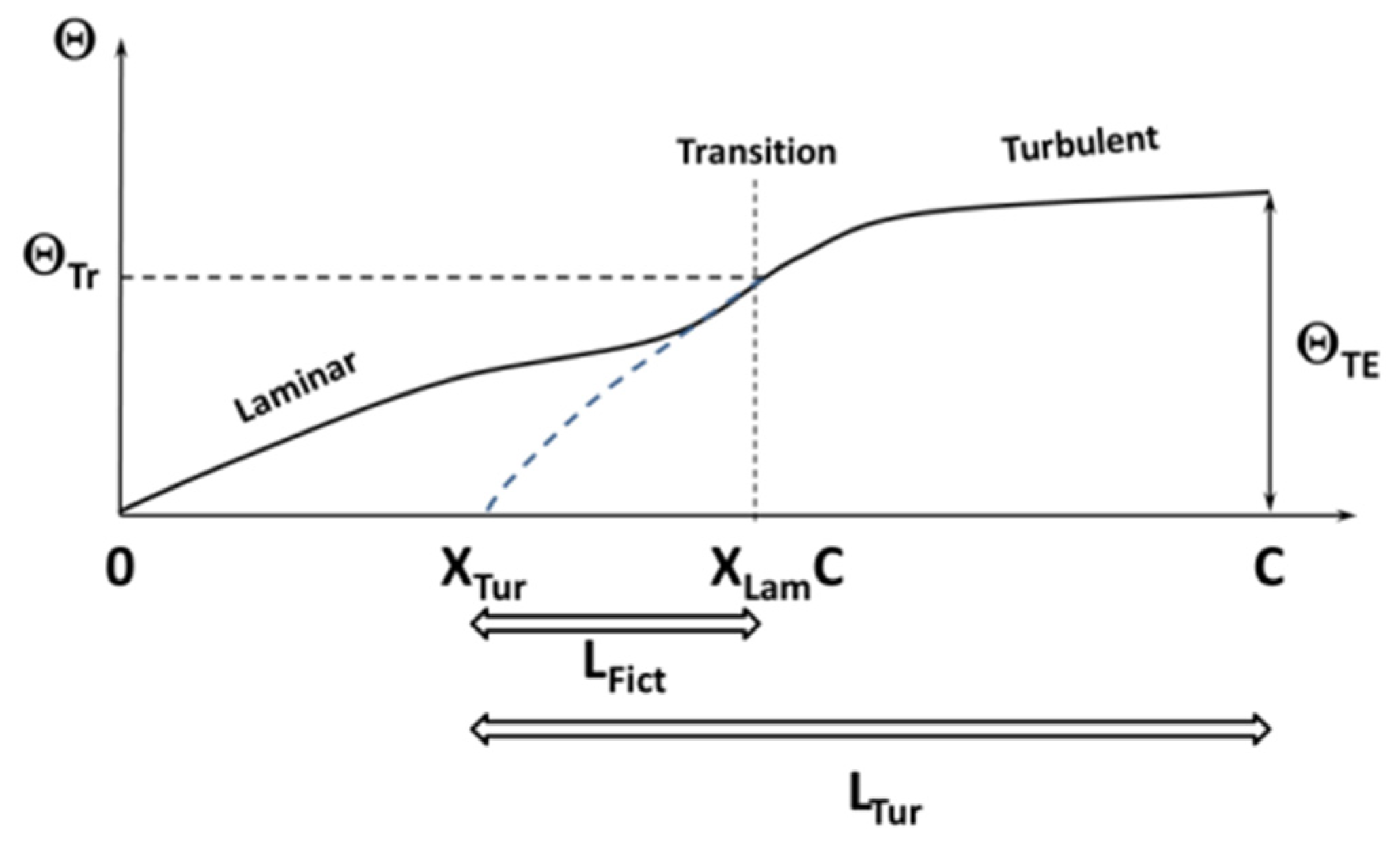
| X | Coordinate in the streamwise direction (m) |
| Y | Coordinate in the spanwise direction (m) |
| LoD | Lift over drag ratio |
| M | Mach number |
| MDD | Divergence Mach number |
| MCr | Critical Mach number |
| N | Number of components |
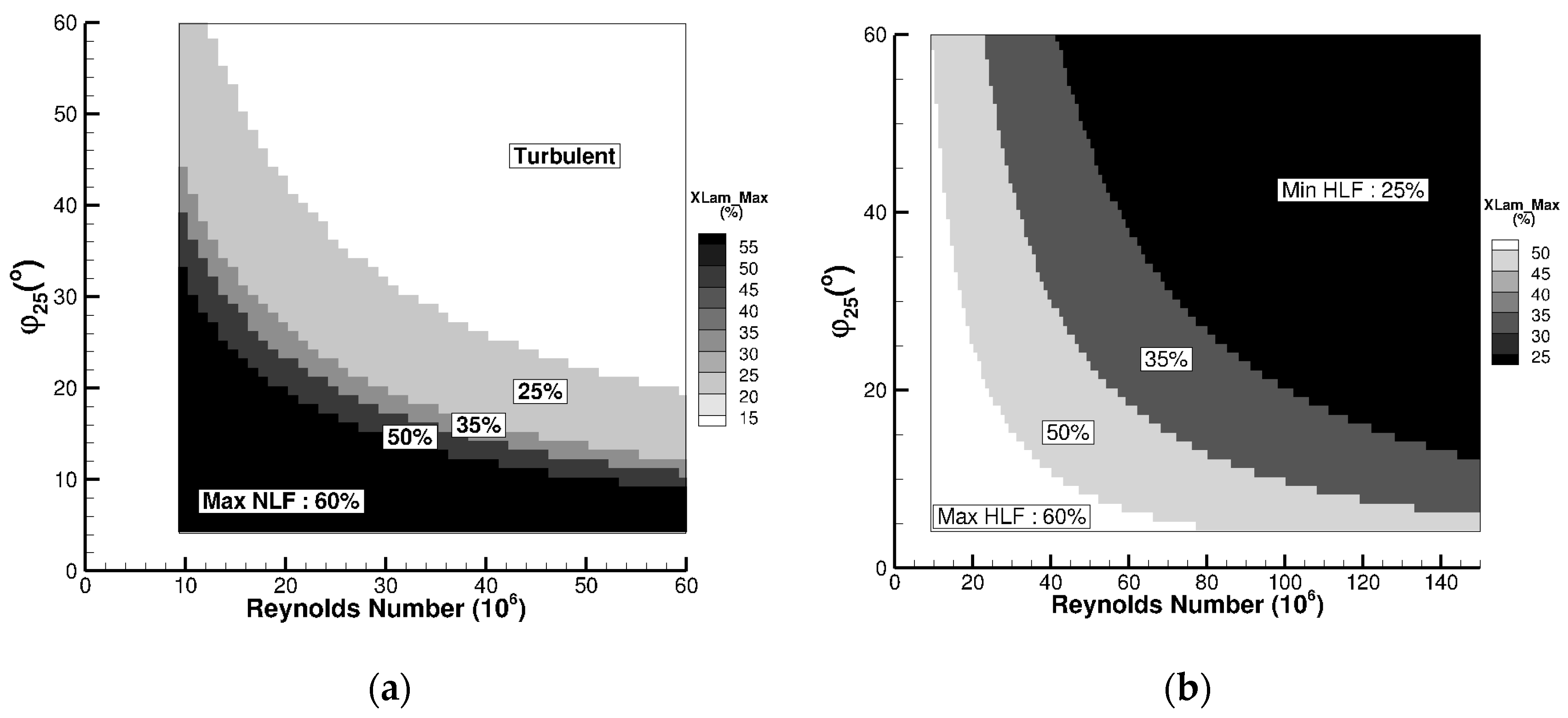
| Re | Reynolds number |
| FF | Form factor |
| QN | Interference factor for nacelles |
| Osw | Oswald factor |
| SWING | Wing area (m2) |
| SREF | Reference area (m2) |
| Cl | Local (airfoil) lift coefficient |
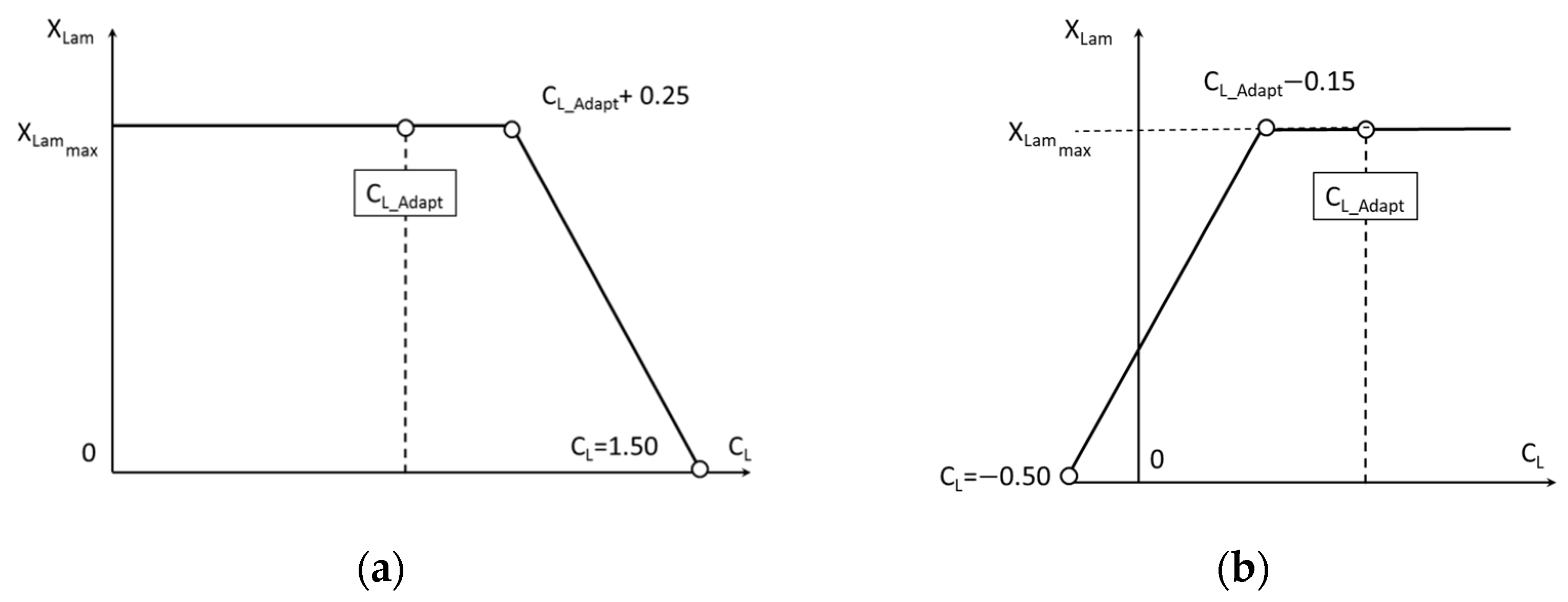
| CL | Lift coefficient |
| CD | Drag coefficient |
| KA | Airfoil Korn factor |
| XTra | Index for turbulent or laminar flow computations |
| XLam | Laminar flow extent (%) |
| NDY | Number of wing section subdivisions |
| AMC | Aerodynamic mean chord (m) |
| Greek Symbols | |
| α | Angle of attack (°) |
| δ | Parameter for Oswald factor |
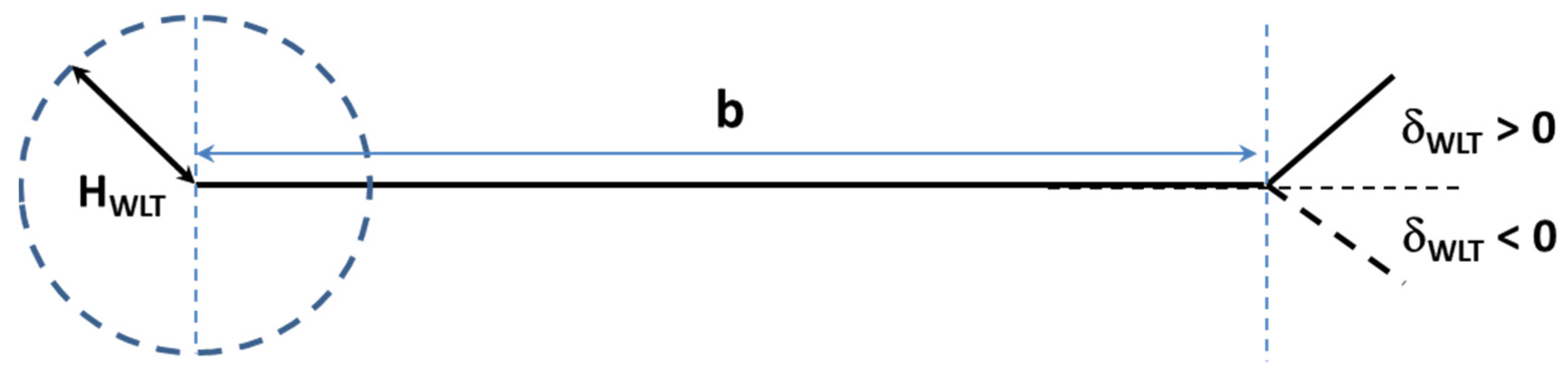
| δWLT | Winglet cant angle (°) |
| λ | Wing aspect ratio |
| ρ | Air density (kg/m3) |
| μ | Dynamic viscosity (kg/(ms)) |
| φ | Sweep angle (°) |
| ε | Wing taper ratio |
| Subscripts | |
| LE | Leading-edge |
| TE | Trailing-edge |
| FUS | Fuselage |
| WLT | Winglet |
| ENG | Engines |
| NAC1 | Nacelle or Fan |
| NAC2 | Turbine |
| TAIL | Tail surfaces |
References
- Liebeck, R.H. Design of the Blended Wing Body Subsonic Transport. AIAA J. Aircr. 2004, 41, 10–25. [Google Scholar] [CrossRef] [Green Version]
- Gauvrit-Ledogar, J.; Defoort, S.; Tremolet, A.; Morel, F. Multidisciplinary Overall Aircraft Design Process Dedicated to Blended Wing Body Configurations. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; p. 3025. [Google Scholar]
- Tremolet, A.; Gauvrit-Ledogar, J.; Brevault, L.; Defoort, S.; Morel, F. Multidisciplinary Overall Aircraft Design and Optimization of Blended Wing Body Configurations. In Proceedings of the 2019 European Conference for Aeronautics and Space Sciences, Madrid, Spain, 1–4 July 2019. [Google Scholar]
- Iwanizki, M.; Wöhler, S.; Fröhler, B.; Zill, T.; Méheut, M.; Defoort, S.; Carini, M.; Gauvrit-Ledogar, J.; Liaboeuf, R.; Tremolet, A.; et al. Conceptual Design Studies of Unconventional Configurations. In Proceedings of the 3AF Aerospace Europe Conference 2020, Bordeaux, France, 25–28 February 2020. [Google Scholar]
- Gauvrit-Ledogar, J.; Tremolet, A.; Moens, F.; Meheut, M.; Defoort, S.; Liaboeuf, R.; Morel, F.; Paluch, B. Multidisciplinary Design Analysis and Optimization Process dedicated to Blended Wing Body Configurations. In Proceedings of the 33rd Congress of ICAS, Stockholm, Sweden, 4–9 September 2022. [Google Scholar]
- Gray, J.; Moore, K.; Naylor, B. OpenMDAO: An Open Source Framework for Multidisciplinary Analysis and Optimization. In Proceedings of the 13th AIAA/ISSMO Multidisciplinary Analysis Optimization Conference, Fort Worth, TX, USA, 13–15 September 2010; p. 9101. [Google Scholar]
- US Standard Atmosphere 1976, NASA-TM-X 74335, NOAA-NASA-USAF, Washington, DC, USA. 1976. Available online: https://ntrs.nasa.gov/citations/19770009539 (accessed on 21 November 2022).
- Lowry, J.; Polhamus, E. A Method for Predicting Lift Increments Due to Flap Deflection at Low Angles of Attack in Incompressible Flow; NASA TN-3911; NACA: Washington, DC, USA, 1957. [Google Scholar]
- Raymer, D.P. Aircraft Design—A Conceptual Approach. In AIAA Education Series, 2nd ed.; American Institute of Aeronautics and Astronautics Inc.: Washington, DC, USA, 1992. [Google Scholar]
- Gur, O.; Mason, W.H.; Schetz, J.A. Full Configuration Drag Estimation. In Proceedings of the AIAA Applied Aerodynamics Conference, San Antonio, TX, USA, 23–25 June 2009; AIAA: Reston, VA, USA, 2009; pp. 2009–4109. [Google Scholar]
- Nita, M.; Scholz, D. Estimating the Oswald Factor from Basic Aircraft Geometrical Parameters. In Proceedings of the Publikationen zum DLRK 2012 (Deutscher Luft-und Raumfahrtkongress, Berlin, Germany, 10–12 September 2012. [Google Scholar]
- Hörner, S.F. Fluid Dynamic Drag; Otterbein Press: Dayton, OH, USA, 1951. [Google Scholar]
- Bourdin, P. Numerical Predictions of Wing-Tip Effects on Lift Induced Drag. In Proceedings of the 23rd ICAS Congress, Toronto, ON, Canada, 8–13 September 2002. [Google Scholar]
- Delavenne, M.; Barriety, B.; Vetrano, F.; Ferrand, V.; Salaun, M. Parametric Analysis of an Active Winglet Concept for High Aspect Ratio Wing using CFD/CSM Computations. In Proceedings of the AIAA Aviation Forum, Virtual, 15–19 June 2020. [Google Scholar]
- Reneaux, J. Réduction de la traînée des avions de transport par laminarité étendue. In Proceedings of the AAAF 24e Colloque Aérodynamique Appliquée, Poitiers, France, 26–28 October 1987. [Google Scholar]
- Cousteix, J. Turbulence et Couche Limite; Cepadues Editions: Toulouse, France, 1989; ISBN 2854282108. [Google Scholar]
- Haftman, B.; Debbeler, F.J.; Gielen, H. Takeoff Drag Prediction for an Airbus A300–600 and A310 Compared with Flight Test Results. AIAA J. Aircr. 1988, 25, 1088–1096. [Google Scholar] [CrossRef]
- Torenbeek, E. Synthesis of Subsonic Airplane Design; Delft University Press: Delft, The Netherlands, 1986. [Google Scholar]
- Wiart, L.; Atinault, O.; Paluch, B.; Hue, D.; Grenon, R. Development of NOVA Aircraft Configurations for Large Engine Integration Studies. In Proceedings of the AIAA Paper, Dallas, TX, USA, 22–26 June 2015; pp. 2015–2254. [Google Scholar]
- Destarac, D. Drag Extraction from Numerical Solutions to the Equations of Fluid Dynamics: The Far-Field Philosophy. In Proceedings of the 43ème Colloque d’Aérodynamique Appliquée AAAF, Poitiers, France, 10–12 March 2008. [Google Scholar]
- Vassberg, J.C.; DeHaan, M.A.; Rivers, S.K.; Wahls, R.A. Development of a Common Research Model for Applied CFD Validations Studies. In Proceedings of the AIAA Paper, Honolulu, HI, USA, 18–21 August 2008; pp. 2008–6919. [Google Scholar]
- Rivers, M.B.; Dittberner, A. Experimental Investigations of the NASA Common Research Model in the NASA Langley NTF and the NASA Ames 11-ft Transonic Wind Tunnel, AIAA 2011-1126. In Proceedings of the 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011. [Google Scholar]
- Hue, D.; Esquieu, S. Computational Drag Prediction of the DPW4 Configuration using the Far-Field Approach. J. Aircr. 2011, 48, 1658–1670. [Google Scholar] [CrossRef] [Green Version]
- Lynde, M.; Campell, R. Computational Design and Analysis of a Transonic Natural Laminar Flow Wing for a Wind Tunnel Model. In Proceedings of the AIAA Aviation Forum 2017, 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–7 June 2017. [Google Scholar] [CrossRef] [Green Version]
- Rivers, M.; Lynde, M.; Campbell, R.; Viken, S.; Chan, D.; Watkins, A.N.; Goodliff, S. Experimental Investigation of the NASA Common Research Model with a Natural Laminar Flow Wing in the NASA Langley National Transonic Facility. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Lynde, M.; Campbell, R.; Viken, S. Additional Findings from the Common Research Model Natural Laminar Flow Wind Tunnel Test. In Proceedings of the AIAA AVIATION Forum 2019, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- de Gaspari, A.; Moens, F. Aerodynamic Shape Design and Validation of an Advanced High-Lift Device for a Regional Aircraft with Morphing Droop Nose. Hindawi Int. J. Aerosp. Eng. 2019, 7982168. [Google Scholar] [CrossRef] [Green Version]
- Moens, F. Augmented Aircraft Performance by the use of Morphing Technology for a Turboprop Regional Aircraft Wing. Biomimetics 2019, 4, 64. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dimino, I.; Andreutti, G.; Moens, F.; Fonte, F.; Pecora, R.; Concilio, A. Integrated Design of a Morphing Winglet for Active Load Control and Alleviation of Turboprop Regional Aircraft. Appl. Sci. 2021, 11, 2439. [Google Scholar] [CrossRef]
- Moens, F.; Perraud, J.; Krumbein, A.; Toulorge, T.; Iannelli, P.; Hanifi, A. Transition Prediction and Impact on 3D High-Lift Wing Configuration. AIAA J. Aircr. 2008, 45, 1751–1766. [Google Scholar] [CrossRef]
- Meheut, M.; Grenon, R.; Carrier, G.; Defos, M.; Duffau, M. Aerodynamic Design of Transonic Flying Wing Configurations. In Proceedings of the CEAS/KAT net II Conference on Key Technologies, Bremen, Germany, 11–12 May 2009. [Google Scholar]
- Meheut, M.; Arntz, A.; Carrier, G. Aerodynamic Shape Optimizations of a Blended Wing Body Configuration for Several Wing Planforms. In Proceedings of the 30th Applied Aerodynamics Conference, New Orleans, LA, USA, 25–28 June 2012; AIAA: Reston, VA, USA, 2012; pp. 2012–3122. [Google Scholar]
- Bennehard, Q. Aerodynamic Shape Optimization of a Short Medium Range Blended Wing Body Aircraft. In Proceedings of the 56th 3AF International Conference on Applied Aerodynamics, Toulouse, France, 28–29 March 2022. [Google Scholar]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Altitude (km) | Temperature (K) | Pressure (Pa) |
|---|---|---|---|
| Troposphere | Z ≤ 11 | ||
| Stratosphere | 11 ≤ Z ≤ 20 | ||
| 20 ≤ Z ≤ 32 |
| Element | Form Factor | SWet |
|---|---|---|
| Wing [17] | 2 SWING | |
| Fuselage [9] | π LFUS DFUS | |
| Winglets [17] | 2 SWLT | |
| Tail surfaces [17] | 2 STAIL | |
| Nacelles [18] | 2π DNAC LNAC |
| ZNAC (m) | Aerodynamic Module | CFD | ||
|---|---|---|---|---|
| CL = 0.50 | CD | ΔCD | ΔCD | |
| Ref. (No Engine) | -- | 210 | -- | -- |
| Baseline | +10.00 | 232 | +22 | +28 |
| Podded | +0.75 | 244 | +34 | +34 |
| BLI | −0.50 | 226 | +16 | +18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moëns, F. A Fast Aerodynamic Model for Aircraft Multidisciplinary Design and Optimization Process. Aerospace 2023, 10, 7. https://doi.org/10.3390/aerospace10010007
Moëns F. A Fast Aerodynamic Model for Aircraft Multidisciplinary Design and Optimization Process. Aerospace. 2023; 10(1):7. https://doi.org/10.3390/aerospace10010007
Chicago/Turabian StyleMoëns, Frédéric. 2023. "A Fast Aerodynamic Model for Aircraft Multidisciplinary Design and Optimization Process" Aerospace 10, no. 1: 7. https://doi.org/10.3390/aerospace10010007
APA StyleMoëns, F. (2023). A Fast Aerodynamic Model for Aircraft Multidisciplinary Design and Optimization Process. Aerospace, 10(1), 7. https://doi.org/10.3390/aerospace10010007