
Air Traffic Management as a Vital Part of Urban Air Mobility—A Review of DLR’s Research Work from 1995 to 2022 †

 , , , and
, , , and
Abstract
:1. Introduction
2. Rise of the Helicopter
2.1. Tackling Airport Congestion
2.2. Rotorcraft-Specific Procedure Design
3. Drones Enter the Airspace
3.1. The Challenge of Integrating Drones into the Airspace
- Maturation, validation and deployment of the fundamental U-space services (U1 and U2) across Europe
- Development of advanced U-space services (U3 and U4) to enable UAS/UAM missions in high traffic density and complex scenarios
- Enablement of UAM by developing concepts and solutions for the integration of autonomous operations over populated, complex and congested airspace environments
- Definition of systems and interfaces for a seamless integration of ATM, UAM and U-space
- Development of concepts and solutions considering social acceptance, environmental impacts and sustainability (e.g., UAM noise, visual pollution, privacy, emissions and recycling/resource management)
- Elaboration of concepts for U-space application above the Very Low Level (VLL) airspace
3.2. Increased Automation and Conflict Detection
4. The Hype of Urban Air Mobility
4.1. Self-Piloted Personal Aerial Vehicles
4.2. Airspace Management for High-Density Operations
5. Ongoing Research
5.1. Concept Development and Operational Aspects
5.2. Bringing Together DLR Expertise on UAM
5.3. Building a “U-Space Regulatory Sandbox”
6. Discussion
7. Conclusions
- Implementing UAM cannot be seen as a single discipline. A multidisciplinary approach is necessary for successful maturation of the existing concepts. For a functional UAM system not only do vehicle design and certification have to be mastered but also airspace integration, operational aspects, infrastructure requirements and public acceptance are to be considered.
- It is expected that first implementations of UAM will rely on piloted vehicles that will benefit from improved pilot-assistance functionalities. At a later stage remotely controlled or autonomously operating vehicles bear the potential for an increase in capacity and efficiency.
- The design principle to separate fixed-wing aircraft and rotorcraft operation as far as possible is still valid for the optimization of airport capacity.
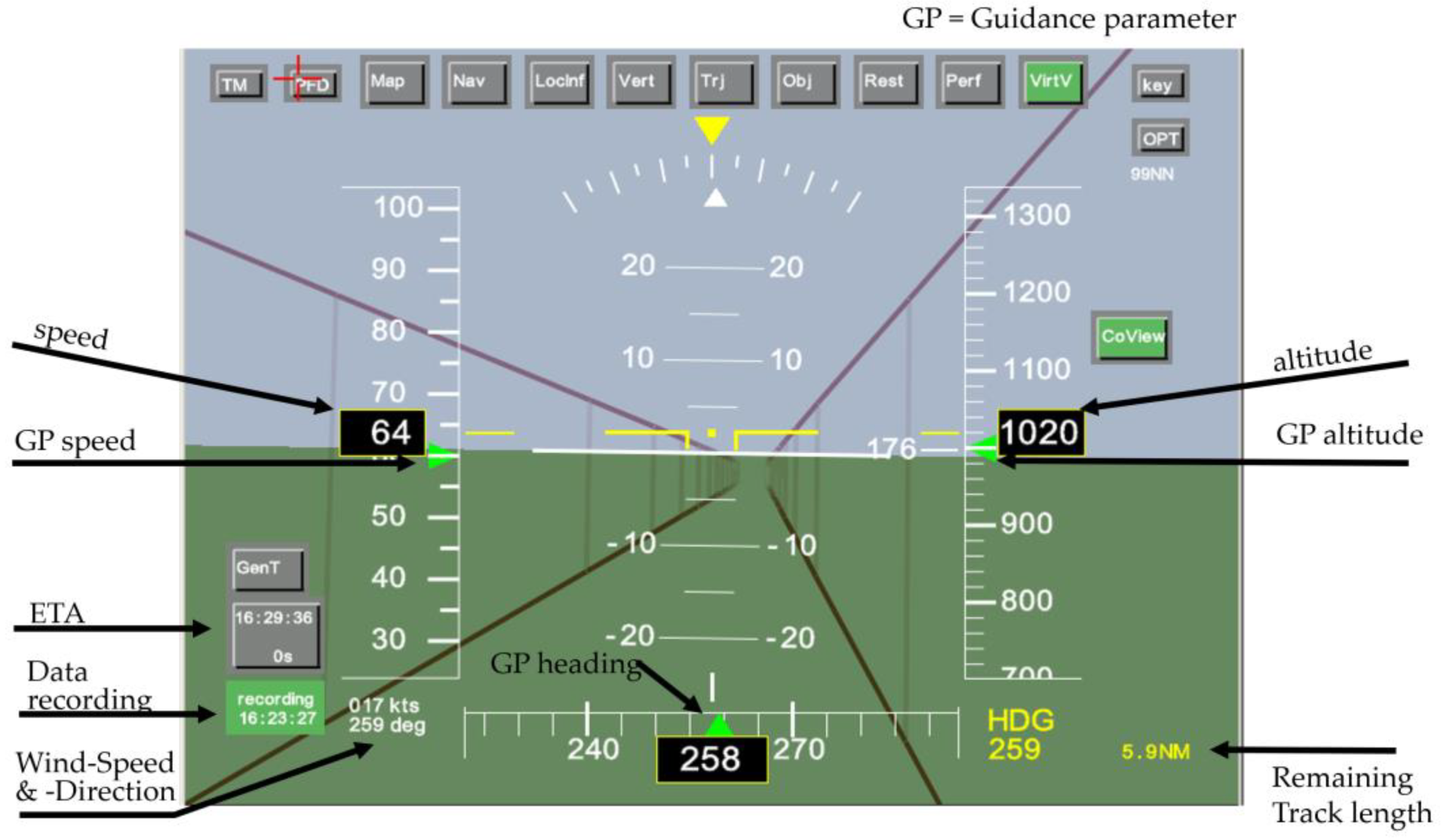
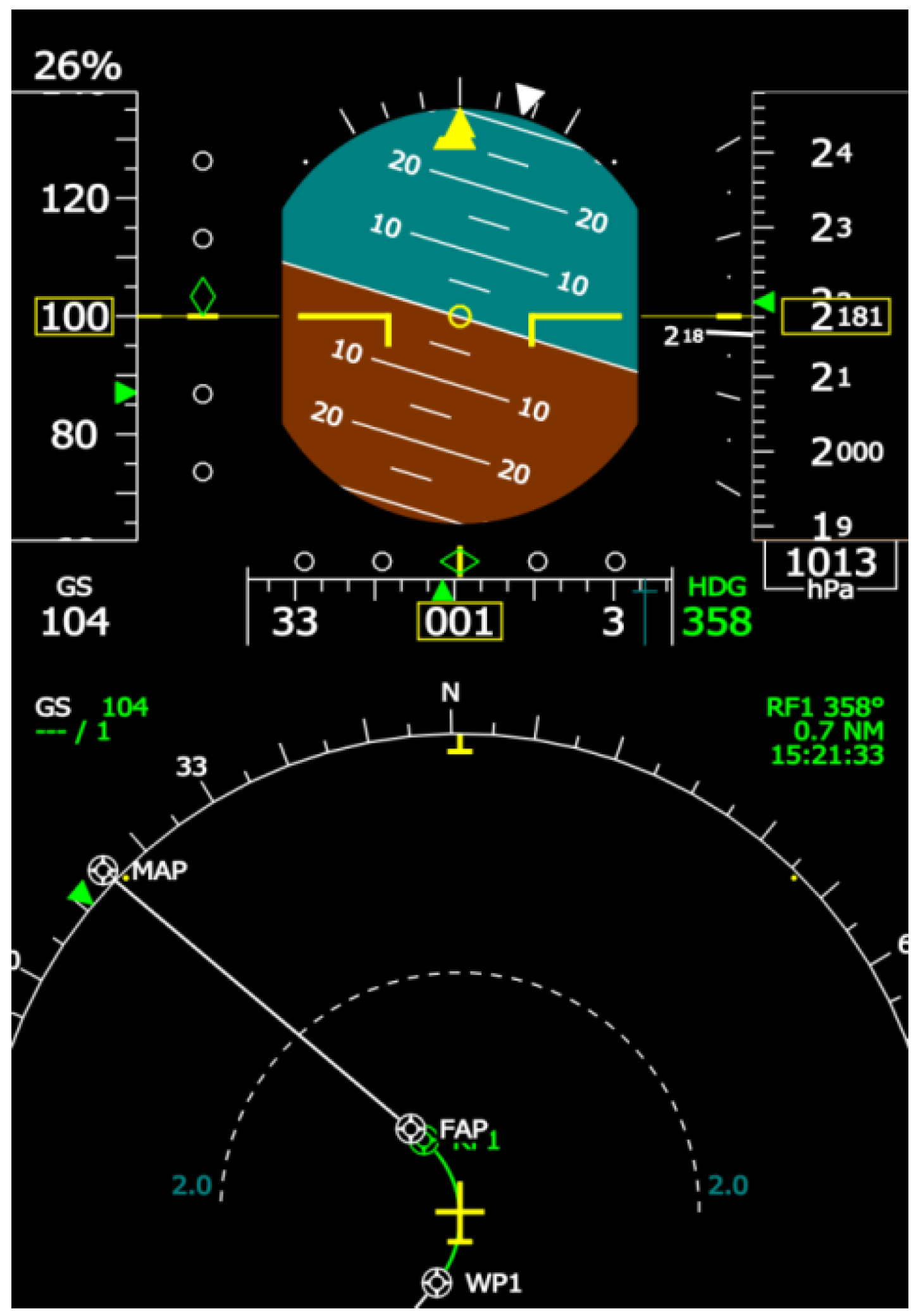
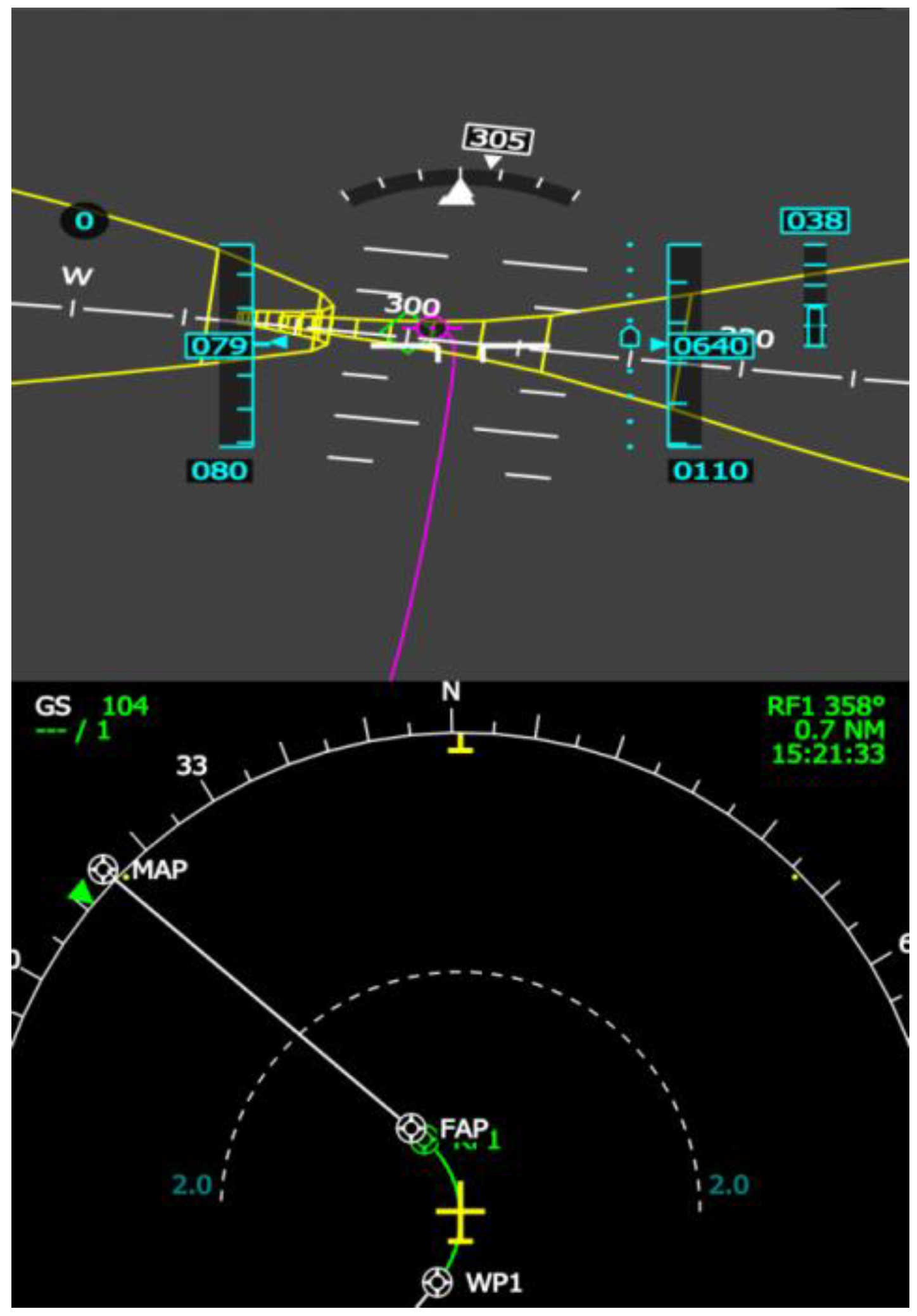
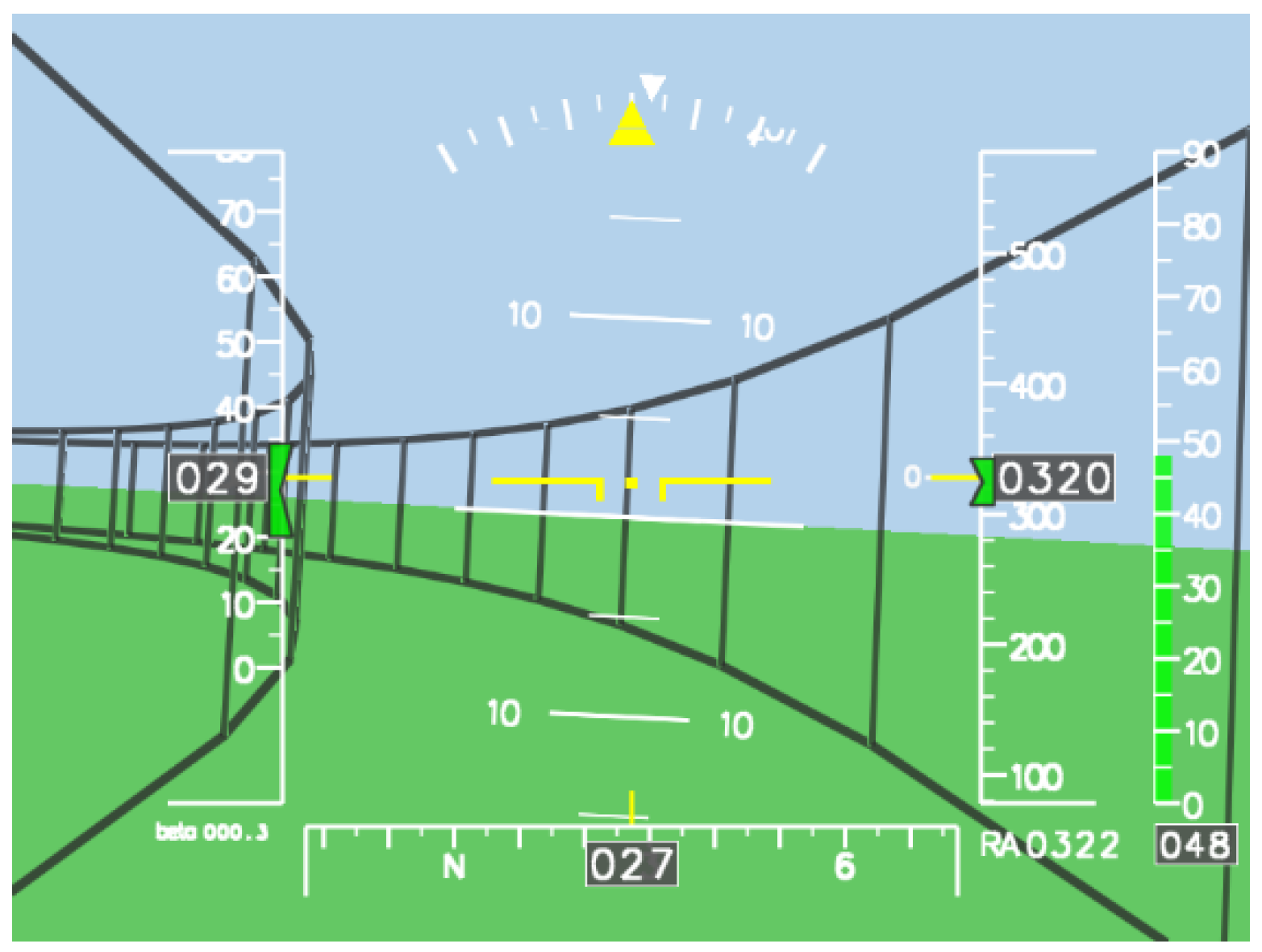
- For piloted rotorcraft or VTOL operations, pilot displays such as tunnel-in-the-sky displays assist in reaching a better flight path accuracy compared to conventional primary flight displays when rotorcraft-specific approaches or noise-abatement procedures are to be flown. A combination of helmet-mounted display system and an autopilot coupling will further reduce pilot workload.
- With increased autopilot assistance in highly augmented rotorcraft, non-conventional control concepts such as steering wheel control could further reduce pilot workload.
- GBAS/SBAS-guided Point-in-Space (PinS) procedures for rotorcraft can be conducted independently from approaching fixed-wing traffic, resulting in a Simultaneous Non-Interfering (SNI) operation. They also help to reduce the noise of approaches in populated areas, and for rotorcraft to operate close to airports without coming into conflict with fixed-wing traffic or requiring runway slots.
- An important challenge for the integration of UAS/UAM into the existing airspace is the upcoming implementation of the U-space EU regulation into national regulation in January 2023.
- Ongoing research will have to focus on the development of advanced U-space Services (U3 and U4) as they are necessary to enable UAS/UAM missions in high traffic density and complex scenarios.
- Strategic conflict avoidance has been identified as a major service in U-space. Detect and avoid services for tactical conflict avoidance will play a role as one of the main capabilities in U-space that complement the given services.
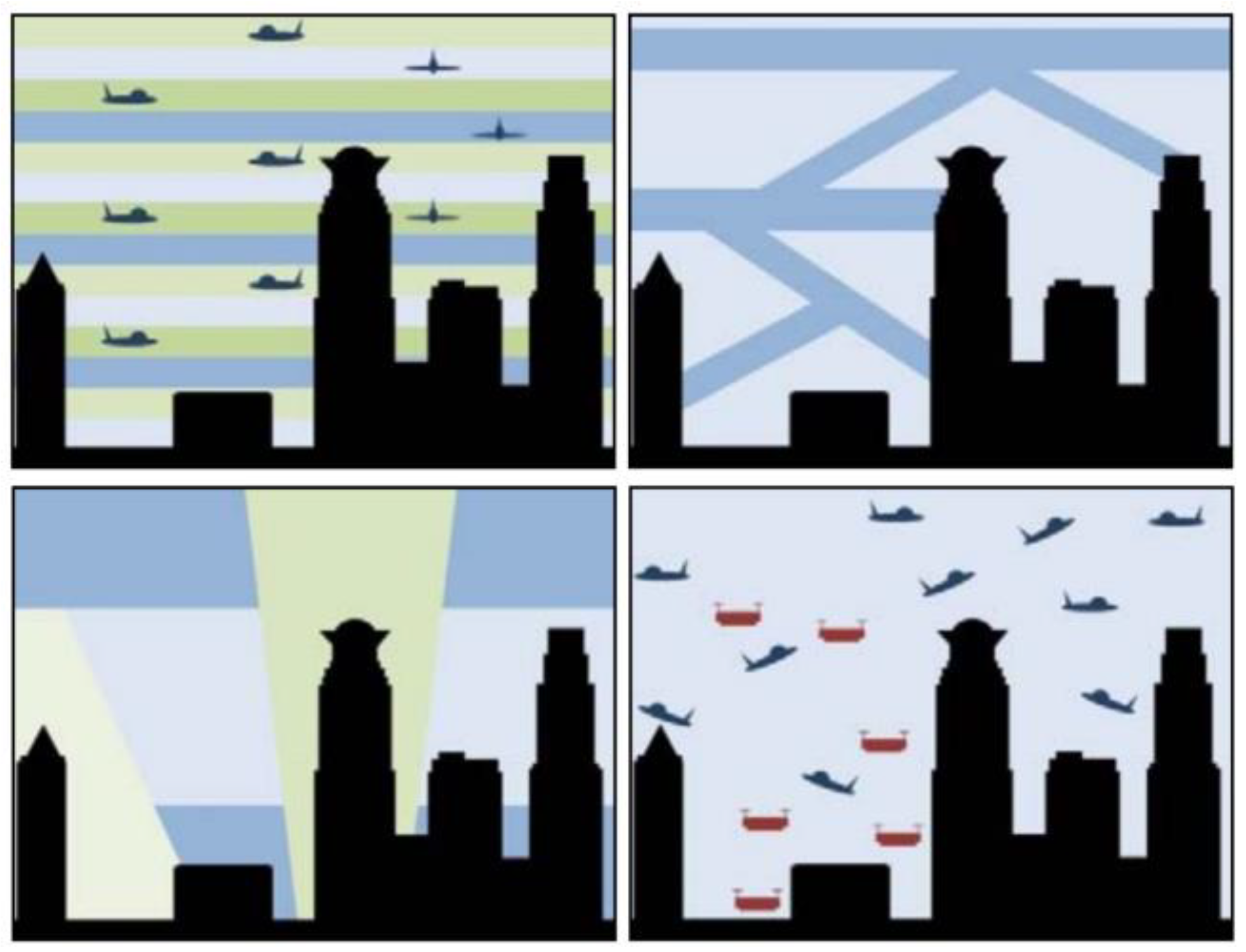
- A “Layer” concept for UAM airspace management achieved the safest operations in simulation by inducing the lowest number of intrusions per flight compared to other concepts such as “Full Mix”, “Zones” or “Tubes”. Efficiency was high for both “Layer” and “Full Mix” concepts.
- UAM traffic is supposed to operate mainly in uncontrolled or future U-space airspace and thus independently of air traffic control (ATC). However, when entering a control zone at an airport direct contact with ATC is required given current aviation regulations. Supporting systems for ATC controllers are needed in order to cope with the increasing workload due to additional UAM traffic.
- Further research is necessary on the performance-based rating of airside operations at future vertiports as well as on the design of vertiport networks in urban environments.
- Large-scale demonstration of UAM use cases have the potential to booster the maturation of UAM technology and will serve to make the public aware of the possibilities of UAM. For field tests in close-to-reality environments suitable testing sites have to be provided for research and demonstration activities. DLR’s “U-space Regulatory Sandbox” at the commercial airport Magdeburg-Cochstedt, Germany, is planned to become such a test site including a functional U-space airspace in 2026.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| ADS-B | Automatic Dependent Surveillance Broadcast |
| ATC | Air Traffic Control |
| ATFM | Air Traffic Flow Management |
| ATM | Air Traffic Management |
| ASM | Airspace Management |
| C2 | Command and Control |
| CDI | Course Deviation Indicator |
| CISP | Common Information Service Provider |
| DAA | Detect and Avoid |
| DLR | Deutsches Zentrum für Luft- und Raumfahrt e.V. (German Aerospace Center) |
| EASA | European Union Aviation Safety Agency |
| EC | European Commission |
| EU | European Union |
| EGNOS | European Geostationary Navigation Overlay Service |
| eVTOL | electric Vertical Take-Off and Landing |
| FAA | Federal Aviation Administration |
| FATO | Final Approach and Take-Off |
| FHS | Flying Helicopter Simulator |
| FLARM | Flight Alarm |
| FMS | Flight Management System |
| FTE | Flight Technical Error |
| GBAS | Ground-Based Augmentation System |
| GNSS | Global Navigation Satellite System |
| HDM | Head-Mounted Display |
| HMD | Helmet-Mounted Display |
| IDF | Initial Departure Fix |
| IFR | Instrument Flight Rules |
| ILS | Instrument Landing System |
| IMC | Instrument Meteorological Conditions |
| LLR | Low-Level IFR Routes |
| LTE | Long-Term Evolution Broadband Standard |
| LPV | Localizer Performance with Vertical Guidance |
| MAPt | Missed Approach Point |
| MLS | Microwave Landing System |
| NAV | Navigation Display |
| NLR | Netherlands Aerospace Centre |
| PAV | Personal Aerial Vehicle |
| PFD | Primary Flight Display |
| PinS | Point-in-Space |
| RF | Radius-to-Fix |
| RNP | Required Navigation Performance |
| RWC | Remain Well-Clear |
| SA | Situational Awareness |
| SBAS | Satellite-Based Augmentation System |
| SNI | Simultaneous Non-Interfering |
| SVS | Synthetic Vision System |
| SWC | Slot Weight Capacity |
| TCAS | Traffic Alert and Collision Avoidance System |
| UAM | Urban Air Mobility |
| UAS | Unmanned Aerial System |
| UAV | Unmanned Aerial Vehicle |
| USSP | U-space Service Provider |
| UTM | Unmanned Air Traffic |
| VFR | Visual Flight Rules |
| VIP | Very Important Person |
| VTOL | Vertical Take-Off and Landing |
References
- EASA. Study on the Societal Acceptance of Urban Air Mobility in Europe; EASA: Cologne, Germany, 2021. [Google Scholar]
- EASA. Urban Air Mobility (UAM). 2022. Available online: https://www.easa.europa.eu/domains/urban-air-mobility-uam (accessed on 1 September 2022).
- Leishman, J.G. Principles of Helicopter Aerodynamics, 2nd ed.; Cambridge Aerospace Series; Cambridge University Press: Cambridge, UK, 2016; ISBN 9781107013353. [Google Scholar]
- Brook, R.; Dodge, M. Helicopter Dreaming: The Unrealised Plans for City Centre Heliports in the Post-war Period. In Infrastructure and the Rebuilt City after the Second World War; Working Paper Series no. 22; Birmingham City University: Birmingham, UK, 2014; pp. 42–55. ISBN 978-1-904839-72-9. [Google Scholar]
- Bliss, L. The Urban Helicopter Dream Is Rising Again. Bloomberg CityLab, 8 October 2019. Available online: https://www.bloomberg.com/news/articles/2019-10-08/what-s-wrong-with-urban-helicopter-commuting (accessed on 8 November 2021).
- Dajani, J.S.; Stortstrom, R.G.; Warner, D.B. The Potential for Helicopter Passenger Service in Major Urban Areas. In NASA-CR-145224, Duke University; 1977. Available online: https://ntrs.nasa.gov/citations/19770020143 (accessed on 8 November 2021).
- Monnet, C. Closing This Chapter: Our Learnings on Transforming How People Move. Acubed Airbus, 30 March 2020. Available online: https://acubed.airbus.com/blog/voom/closing-this-chapter-our-learnings-on-transforming-how-people-move/ (accessed on 8 November 2021).
- Sheehan, V.; Vertical Flight Society Electric VTOL Directory Hits 700 Concepts. 16 August 2022. Available online: https://vtol.org/news/press-release-vfs-electric-vtol-directory-hits-700-concepts (accessed on 1 September 2022).
- Nolan, M.S. Fundamentals of Air Traffic Control; Delmar Cengage Learning: Clifton Park, NY, USA, 2010; ISBN 978-1435482722. [Google Scholar]
- Britannica. Air Traffic Control. Available online: www.britannica.com (accessed on 8 November 2021).
- European Commision. Air Transport, Study on Potential Benefit to Airport/ATM Congestion Through Special Operation Procedures for Rotorcraft. In Transport Research; European Commision: Luxembourg, 1996; ISBN 92-827-7995-5. [Google Scholar]
- Knabe, F. WP D1.2 Capacity Increase Simulation Frankfurt Airport; Deutsche Forschungsanstalt für Luft- und Raumfahrt: Braunschweig, Germany, 1995. [Google Scholar]
- Knabe, F.; Dreyzehner, T.; Korn, B. Super Close Runway Operations (SupeRO): A New Concept to Increase Runway Capacity. In Proceedings of the 2022 Integrated Communication, Navigation and Surveillance Conference (ICNS), Dulles, VA, USA, 5–7 April 2022. [Google Scholar] [CrossRef]
- Lüken, T.; Korn, B. Helicopter SBAS Guidance for IFR Steep and Curved Approaches. In Proceedings of the International Symposium on Precision Approach and Performance Based Navigation, Bonn, Germany, 14–15 October 2008. [Google Scholar]
- ICAO Safety Accident Statistics (2008–2016). Available online: https://www.icao.int/safety/iStars/Pages/Accident-Statistics.aspx (accessed on 1 September 2022).
- ICAO. Procedures for Air Navigation Services; Doc 8168-ops/611; ICAO: Montreal, QC, Canada, 2006; Volume 2. [Google Scholar]
- Schmerwitz, S.; Dautermann, T.; Lenz, H.; Lüken, T. GNSS Solutions for Increased GA and Rotorcraft Airport Accessibility Demonstration. In Proceedings of the 45th European Rotorcraft Forum (ERF), Warsaw, Poland, 17–19 September 2019. [Google Scholar]
- Lüken, T.; Schmerwitz, S.; Halbe, O.; Hamers, M.; Roland, B.; Ganille, T. Flight Evaluation of Advanced SBAS Point-in-space Helicopter Procedures Facilitating IFR Access in Difficult Terrain abd Dense Airspaces. In Proceedings of the 45th European Rotorcraft Forum, Warsaw, Poland, 17–19 September 2019. [Google Scholar]
- FAA. Unmanned Aircraft System (UAS) Traffic Management (UTM), Concept of Operations v2.0. NextGEN; FAA: Washington, DC, USA, 2020. [Google Scholar]
- SESAR. European Drones Outlook Study, Unlocking the Value for Europe; SESAR Joint Undertaking: Brussels, Belgium, 2016. [Google Scholar]
- SESAR. U-Space, Supporting Safe and Secure Drone Operations in Europe, Consolidated Report on SESAR U-Space Research and Innovation Results; Publications Office of the European Union: Luxembourg, 2020. [Google Scholar] [CrossRef]
- SESAR3. European ATM Master Plan: Digitalising Europe’s Aviation Infrastructure. Executive View: 2020 Edition; EU Publications Office: Luxembourg, 2020. [Google Scholar]
- European Commission, Directorate-General for Research and Innovation. Strategic Research and Innovation Agenda (SRIA) of the European Open Science Cloud (EOSC); Publications Office of the European Union: Luxembourg, 2022. [Google Scholar]
- Geister, D.; Korn, B. Concept for Urban Airspace Integration, Integrating UAS into the Future Aviation System. DLR Blueprint. 2017. Available online: https://www.dlr.de/content/de/downloads/2017/blueprint-concept-for-urban-airspace-integration_2933.pdf?__blob=publicationFile&v=11 (accessed on 8 November 2021).
- CORUS. U-Space Concept of Operations; Eurocontrol: Brussels, Belgium, 2019. [Google Scholar]
- Kuenz, A. City-ATM—Live Drone Trials with Dynamic Geo-fencing. In Proceedings of the 39th AIAA/IEEE Digital Avionics Systems Conference, DASC 2020, Virtual Conference, 11–16 October 2020; ISBN 978-172819825-5. [Google Scholar]
- Kuenz, A. City-ATM—Safe Drone Operations in Dense Traffic. In Proceedings of the 40th AIAA/IEEE Digital Avionics Systems Conference, DASC 2021, San Antonio, TX, USA, 3–7 October 2021. [Google Scholar]
- Niklaß, M.; Dzikus, N.; Swaid, M.; Berling, J.; Lührs, B.; Lau, A.; Terekov, I.; Gollnick, V. A Collaborative Approach for an Integrated Modeling of Urban Air Transportation Systems. Aerospace 2020, 7, 50. [Google Scholar] [CrossRef]
- Törsleff, S.; Kilian, H.F.; Reiswich, E.; Swaid, M.; Grebner, T. Towards a U-space Compliant UTM for Urban Airspaces. In Proceedings of the 27th ITS World Congress, Hamburg, Germany, 11–15 October 2021. [Google Scholar]
- EASA. Notice of Proposed Amendment 2021-14: Development of Acceptable Means of Compliance and Guidance Material to Support the U-Space Regulation; EASA Publication Office: Cologne, Germany, 2021. [Google Scholar]
- Dauer, J. Automated Low-Altitude Air Delivery; Springer International Publishing: New York, NY, USA, 2022. [Google Scholar] [CrossRef]
- Temme, A.; Helm, S. Unmanned Freight Operations. In Proceedings of the Deutscher Luft- und Raumfahrtkongress, DLRK 2016, Braunschweig, Germany, 13–15 September 2016. [Google Scholar]
- Geister, R.M.; Peinecke, N.; Sundqvist, B.-G.; del Core, G.; Timmerman, B.; Boer, J.-F.; Zimra, D.; Steinbuch, Y.; Batzdorfer, S.; Grevtsov, N.; et al. On-Board System Concept for Drones in the European U-space. In Proceedings of the Digital Avionics Systems Conference, DASC 2019, San Diego, CA, USA, 8–12 September 2019. [Google Scholar]
- Peinecke, N.; Kuenz, A. Deconflicting the Urban Drone Airspace. In Proceedings of the 6th IEEE/AIAA Digital Avionics Systems Conference, DASC 2017, St. Petersburg, FL, USA, 17–21 September 2017; ISBN 978-153860365-9. [Google Scholar]
- Peinecke, N.; Limmer, L.; Volkert, A. Application of “Well Clear” to Small Drones. In Proceedings of the Digital Avionics Systems Conference, DASC 2018, London, UK, 23–27 September 2018. [Google Scholar]
- Pastor, E.; Filippone, E.; Ferrara, G.; Peinecke, N.; Theunissen, E.; Hagstrom, P.; Taurino, D. URClearED—Defining the Remain Well Clear Concept for Airspace D-G Classes in the European Airspace. In Proceedings of the AIAA Aviation and Aeronautics Forum and Exposition, AIAA AVIATION Forum 2021, Virtual, 2–6 August 2021; ISBN 978-162410610-1. [Google Scholar]
- Naser, F.; Peinecke, N.; Schuchardt, B.I. Air Taxis vs. Taxicabs: A Simulation Study on the Efficiency of UAM. In Proceedings of the AIAA Aviation and Aeronautics Forum and Exposition, AIAA AVIATION Forum 2021, Virtual, 2–6 August 2021. [Google Scholar] [CrossRef]
- Dahle, O.H.; Rydberg, J.; Dullweber, M.; Peinecke, N.; Bechina, A.A.A. A Proposal for a Common Metric for Drone Traffic Density. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 64–72. [Google Scholar] [CrossRef]
- Peinecke, N. How to stay well clear in corridors and swarms: Detect-and-avoid ranges for geovectoring concepts. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 57–63. [Google Scholar] [CrossRef]
- Vertical Flight Society. eVTOL Aircraft Directory. Available online: https://evtol.news/aircraft (accessed on 8 November 2021).
- Gartner Inc. Hype Cycle for Emerging Technologies. 2019. Available online: www.gartner.com/smarterwithgartner (accessed on 1 January 2020).
- Straubinger, A.; Rothfeld, R.; Shamiyeh, M.; Büchter, K.-D.; Kaiser, J.; Plötner, K.O. An Overview of Current Research and Developments in Urban Air Mobility—Setting the Scene for UAM Introduction. J. Air Transp. Manag. 2020, 87, 101852. [Google Scholar] [CrossRef]
- Nieuwenhuizen, F.M.; Jump, M.; Perfect, P.; White, M.D.; Padfield, G.D.; Floreano, D.; Schill, F.; Zufferey, J.-C.; Fua, P.; Bouabdallah, S.; et al. myCopter—Enabling Technologies for Personal Aerial Transportation Systems. In Proceedings of the 3rd International HELI World Conference, Frankfurt/Main, Germany, 2–4 November 2011. [Google Scholar]
- Schuchardt, B.I. Workload Reduction through Steering Wheel Control for Rotorcraft. CEAS Aeronaut. J. 2019, 10, 893–902. [Google Scholar] [CrossRef]
- Nieuwenhuizen, F.M.; Bülthoff, H.H. Evaluation of Haptic Shared Control and a Highway-in-the-Sky Display for Personal Aerial Vehicles. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, AIAA, Atlanta, GA, USA, 16–20 June 2014; pp. 1–9. [Google Scholar]
- Gursky, B.I.; Olsman, W.F.J.; Peinecke, N. Development of a Tunnel-in-the-Sky Display for Helicopter Noise Abatement Procedures. CEAS Aeronaut. J. 2014, 5, 199–208. [Google Scholar] [CrossRef]
- Achtelik, M.W.; Lynen, S.; Weiss, S.; Chli, M.; Siegwart, R. Motion and Uncertainty-Aware Path Planning for Micro Aerial Vehicles. J. Field Robot. 2014, 31, 676–698. [Google Scholar] [CrossRef]
- Sun, X.; Christoudias, C.M.; Lepetit, V.; Fua, P. Real-time Landing Place Assessment in Man-made Environments. Mach. Vis. Appl. 2014, 25, 211–227. [Google Scholar] [CrossRef] [Green Version]
- Sunil, E.; Hoekstra, J.; Ellerbroek, J.; Bussink, F.; Nieuwenhuisen, D.; Vidosavljevic, A.; Kern, S. Metropolis: Relating Airspace Structure and Capacity for Extreme Traffic Densities. In Proceedings of the USA/Europe Air Traffic Management Research and Development Seminars, Lissabon, Portugal, 23–26 June 2015. [Google Scholar]
- Schneider, O.; Kern, S.; Knabe, F.; Gerdes, I.; Delahaye, D.; Vidosavljevic, A.; van Leeuwen, P.; Nieuwenhuisen, D.; Sunil, E.; Hoekstra, J.; et al. Metropolis Urban Airspace Design. Metropolis Project Deliverable Concept Design D2.2, ACP3-GA-2013-34 2014. Available online: https://homepage.tudelft.nl/7p97s/Metropolis/downloads/Metropolis_D2-2_Concept_Design_Report_v10.pdf (accessed on 1 September 2022).
- Leipold, A.; Aptsiauri, G.; Ayazkhani, A.; Bauder, U.; Becker, R.-G.; Berghof, R.; Claßen, A.; Dadashi, A.; Dahlmann, K.; Dzikus, N.; et al. DEPA 2050—Development Pathways for Aviation up to 2050; Final Report, DLR IB; German Aerospace Center: Cologne, Germany, 2021. [Google Scholar]
- Schuchardt, B.I.; Becker, D.; Becker, R.-G.; End, A.; Gerz, T.; Meller, F.; Metz, I.C.; Niklaß, M.; Pak, H.; Prakasha, S.P.; et al. Urban Air Mobility Research at the DLR German Aerospace Center—Getting the HorizonUAM Project Started. In Proceedings of the AIAA Aviation 2021 Forum, Virtual, 2–6 August 2021. [Google Scholar] [CrossRef]
- Cohen, A.P.; Shaheen, S.A.; Farrar, E.M. Urban Air Mobility: History, Ecosystem, Market Potential, and Challenges. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6074–6087. [Google Scholar] [CrossRef]
- Airservices Australia and Embraer Business Innovation Center. Urban Air Traffic Management Concept of Operations, Version 1; Airservices Australia and Embraer Business Innovation Center: Canberra, Australia, 2020. [Google Scholar]
- Vascik, P.D.; Hansman, R.J. Scaling Constraints for Urban Air Mobility Operations: Air Traffic Control, Ground Infrastructure, and Noise. In Proceedings of the Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Panchal, I.; Metz, I.C.; Ribeiro, M.; Armanini, S.F. Urban Air Traffic Management for Collision Avoidance with Non-Cooperative Airspace Users. In Proceedings of the 33rd Congress of the International Council of the Aeronautical Sciences, Stockholm, Sweden, 4–9 September 2022. [Google Scholar]
- Ahrenhold, N.; Pohling, O.; Schier, S. Impact of Air Taxis on Air Traffic in the Vicinity of Airports. Infrastructures 2021, 6, 140. [Google Scholar] [CrossRef]
- Metz, I.C.; Schier-Morgenthal, S. An Operational Concept for the Integration of Urban Air Traffic Mobility Vehicles into the Air Traffic Control Processes. In Proceedings of the 33rd Congress of the International Council of the Aeronautical Sciences, Stockholm, Sweden, 4–9 September 2022. [Google Scholar]
- Bundesministerium der Justiz. Luftverkehrsgesetz, Version of 10 May 2007; Bundesministerium der Justiz: Berlin, Germany, 1922. [Google Scholar]
- Schweiger, K.; Preis, L. Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations. Drones 2022, 6, 179. [Google Scholar] [CrossRef]
- Schweiger, K.; Knabe, F.; Korn, B. An Exemplary Definition of a Vertidrome’s Airside Concept of Operations. Aerosp. Sci. Technol. 2021, 125, 107144. [Google Scholar] [CrossRef]
- Schweiger, K.; Knabe, F.; Korn, B. Urban Air Mobility: Vertidrome Airside Level of Service Concept. In Proceedings of the AIAA Aviation 2021 Forum, Virtual, 2–6 August 2021. [Google Scholar] [CrossRef]
- Wendt, K.; König, A.; Naser, F. Development of a Modular Model City for Unmanned Aircraft Vehicle Experiments—A Visionary Concept. In Proceedings of the AIAA Aviation 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022. [Google Scholar] [CrossRef]
- Anon. Uspace4UAM Press Release 1. 2021. Available online: https://www.dlr.de/fl/PortalData/14/Resources/dokumente/Uspace4UAM_press_release_1.pdf (accessed on 12 December 2022).
- Anon. Air Mobility Urban—Large Experimental Demonstrations. Available online: https://amuledproject.eu/, (accessed on 12 December 2022).
- Xu, Y.; Su, Y.; Fremond, R.; Tang, Y.; Uzun, M.; Hasanzade, M.; Bhundoo, P.; Inalhan, G.; Murphy, D.; Oreg, Z.; et al. Platform, Missions and Performance Assessment Report and U-space System Models. AMU-LED D3.2, December 2021. Available online: https://amuledproject.eu/deliverables/ (accessed on 1 December 2022).
- SESAR. Sustainability, Airspace Optimisation and Urban Air Mobility—Focus of Latest Very Large-scale Demonstrations. Available online: https://www.sesarju.eu/news/sustainability-airspace-optimisation-and-urban-air-mobility-focus-latest-very-large-scale (accessed on 12 December 2022).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
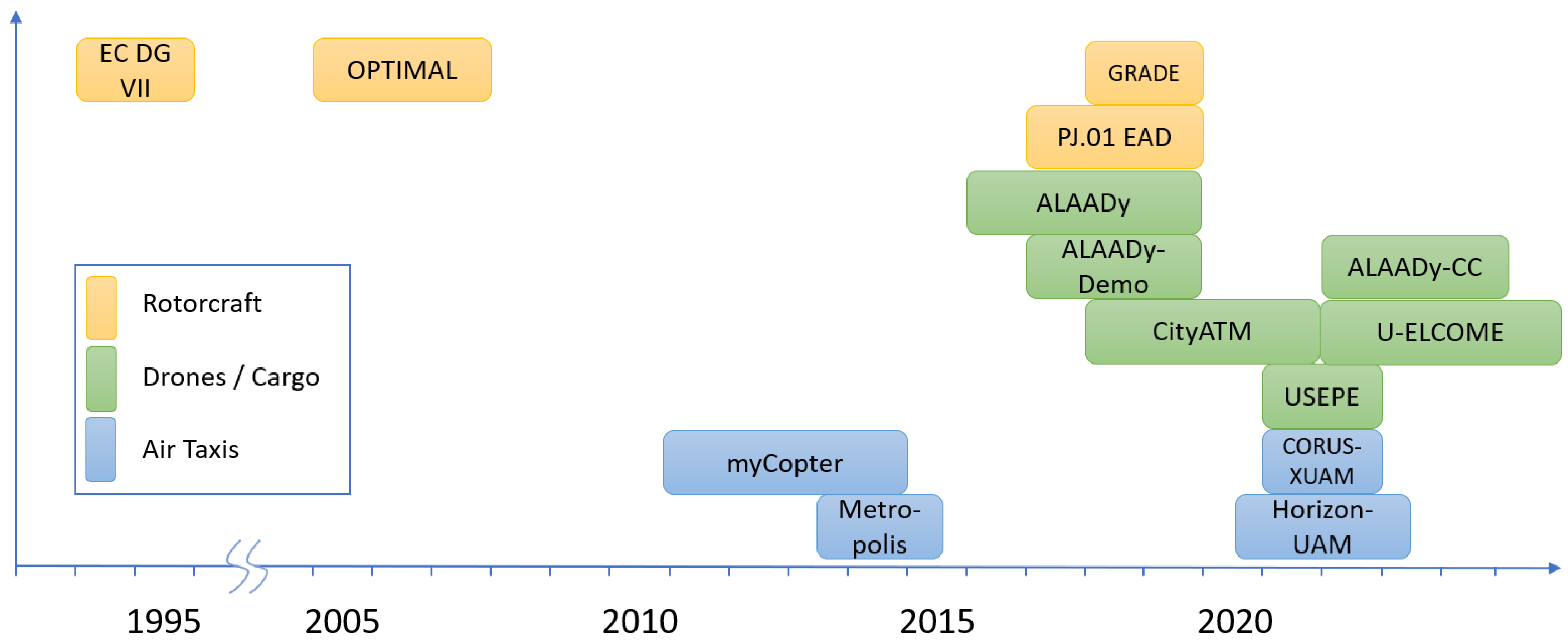
| Project | Topic | Years | Partners | Key Outcome |
|---|---|---|---|---|
| EC DG VII | Study on potential benefit to airport/ATM congestion through special operational procedures for rotorcraft | 1994–1995 | Eurocopter, Agusta Westland, DFS Deutsche Flugsicherung Gmbh, Aeroport de Paris, TU Braunschweig, DLR | Scenario development, procedure design and capacity assessment for fixed-wing replacement by rotorcraft and tiltrotor at hub airports |
| OPTIMAL | Optimized Procedures and Techniques for IMprovement of Approach and Landing | 2005–2007 | DLR, INECO, AIRBUS, THALES ATM, ISDEFE, NLR, AENA, EUROCONTROL, THALES Avionics, AGUSTA, DFS, LVNL, ENAV, SICTA | Definition and validation of innovative procedures for the approach and landing phases of aircraft and rotorcraft in a pre-operational environment |
| GRADE | Increased General Aviation and Rotorcraft operations supported by GNSS solutions | 2018–2019 | CIRA, BULATSA, DLR, MATS, NAIS, TUBS, UNIPARTH, ISSNOVA | Demonstration of Standard Point-In-Space (PinS) helicopter procedures as well as low-level IFR routes (LLR) for helicopters |
| PJ.01 EAD | Enhanced Arrival and Departures | 2017–2019 | Airbus Helicopters, Thales Avionics, DLR | Validation of Advanced PinS helicopter procedures supported by SVS und HMD systems |
| CityATM | Demonstration of Traffic Management in Urban Airspace | 2018–2021 | DLR (5 institutes/facilities), in cooperation with NXP, FlyNex GmbH, DFS Deutsche Flugsicherung GmbH, Auterion AG, Zentrum für Angewandte Luftfahrtforschung GmbH, KopterKraft | U-space Demonstration Platform with focus on density-based airspace and traffic management |
| USEPE | U-space Separation in Europe | 2021–2022 | ISDEFE, Nommon, Universitetet i Sørøst-Norge, DLR, Leibniz Universität Hannover, POLIS, Indra Navia AS | Concept and simulation of an advanced separation and traffic management for an urban drone airspace. |
| ALAADy | Automated Low Altitude Air Delivery | 2016–2019 | DLR (7 institutes/facilities) | Concept and feasibility study for the operation of a large cargo drone in lower airspace. |
| ALAADy-Demo | ALAADy Demonstrator | 2016–2019 | DLR (3 institutes/facilities) | Realization of several technical prototypes for a rotary wing (gyrocopter) cargo drone. |
| ALAADy-CC | Cross Country Air Delivery | 2022–2024 | DLR (6 institutes/facilities) | Realization of an actual test-flight operation of a gyrocopter cargo drone. |
| U-ELCOME | U-space European COMmon dEpLoyment | 2022–2025 | EUROCONTROL, DLR, ENAV, ENAIRE, Thales, Airbus, CRIDA, EUROUSC, CIRA, Honeywell (51 partners) | Implementation of a common framework and understanding for the deployment of U-space ConOps. |
| myCopter | Enabling Technologies for Personal Aerial Transportation Systems | 2011–2014 | MPI for Biological Cybernetics, UoL, EPFL, ETHZ, KIT, DLR | Control concepts for PAV demonstrated in ground-based and in-flight simulations, human-machine interfaces, computer-vision-based automation, collision avoidance, automatic landing place detection and societal impact assessment |
| Metropolis | Relating Airspace Structure and Capacity for Extreme Traffic Densities | 2013–2015 | TU Delft, DLR, ENAC, NLR | Development and assessment of airspace concepts for high-density UAM operations |
| CORUS-XUAM | Concept of Operations for European U-space Services—Extension for Urban Air Mobility | 2020–2022 | Eurocontrol, ADP, Aslogic, The British Light Aviation Centre Limited, DFS, DLR, Droniq, DSNA, ENAIRE, ENAV, Hemav Foundation, INDRA, Swedish Civil Aviation Administration, NATS, Pipistrel, SkeyDrone, UNIFLY, UPC, Volocopter | Updated U-space ConOps including Urban Air Mobility operations |
| HorizonUAM | Urban Air Mobility Research at the German Aerospace Center (DLR) | 2020–2023 | DLR (11 institutes/facilities) | Assessment of chances and risks of urban air mobility concepts regarding vehicle, infrastructure, operation and public acceptance |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schuchardt, B.I.; Geister, D.; Lüken, T.; Knabe, F.; Metz, I.C.; Peinecke, N.; Schweiger, K. Air Traffic Management as a Vital Part of Urban Air Mobility—A Review of DLR’s Research Work from 1995 to 2022. Aerospace 2023, 10, 81. https://doi.org/10.3390/aerospace10010081
Schuchardt BI, Geister D, Lüken T, Knabe F, Metz IC, Peinecke N, Schweiger K. Air Traffic Management as a Vital Part of Urban Air Mobility—A Review of DLR’s Research Work from 1995 to 2022. Aerospace. 2023; 10(1):81. https://doi.org/10.3390/aerospace10010081
Chicago/Turabian StyleSchuchardt, Bianca I., Dagi Geister, Thomas Lüken, Franz Knabe, Isabel C. Metz, Niklas Peinecke, and Karolin Schweiger. 2023. "Air Traffic Management as a Vital Part of Urban Air Mobility—A Review of DLR’s Research Work from 1995 to 2022" Aerospace 10, no. 1: 81. https://doi.org/10.3390/aerospace10010081
APA StyleSchuchardt, B. I., Geister, D., Lüken, T., Knabe, F., Metz, I. C., Peinecke, N., & Schweiger, K. (2023). Air Traffic Management as a Vital Part of Urban Air Mobility—A Review of DLR’s Research Work from 1995 to 2022. Aerospace, 10(1), 81. https://doi.org/10.3390/aerospace10010081