
The Low Fuel Consumption Keeping Method of Eccentricity under Integrated Keeping of Inclination-Longitude


Abstract
:1. Introduction
- (1)
- It can save the fuel required for the mean longitude keeping;
- (2)
- The number of times of SK can be reduced;
- (3)
- The number of thrusters required is small, as only one thruster pointing in the north–south direction is required;
- (4)
- By maneuvering −5~5° in the yaw direction, the mean longitude can be kept.
2. Calculation of Mean Eccentricity
2.1. The Vernal Equinox Orbital Elements
- is the orbital semi-major axis, and the unit is m;
- is the mean orbital longitude, and the unit is rad;
- is the Y-component of the orbital eccentricity vector, dimensionless;
- is the X-component of the orbital eccentricity vector, dimensionless;
- is the Y-component of the orbital inclination vector, in rad;
- is the X-component of the orbital inclination vector, in rad.
- is the argument of perigee of the satellite in the J2000.0 coordinate system, in rad;
- M is the mean anomaly of the satellite in the J2000.0 coordinate system, in rad;
- Ω is the right ascending of ascension node of the satellite in the J2000.0 coordinate system, in rad;
- is the orbital inclination of the satellite in the J2000.0 coordinate system, in rad;
- is the rotational angular velocity of the Earth, in rad/s;
- is the Greenwich sidereal hour angle at the current moment, in rad;
- is the Greenwich sidereal hour angle at the time of J2000.0, and the value is 4.899787426069032 rad.
2.2. Definition of Mean Orbital Elements
2.3. Calculation of Mean Eccentricity
2.3.1. Earth’s Non-Spherical Gravitational Perturbation Term
- Subscript “E” indicates the Earth’s non-spherical gravitational perturbation term;
- is the second-order harmonic coefficient of the Earth’s non-spherical gravitation, dimensionless;
- is mean angular velocity for standard GEO orbit, in rad/s;
- is the average semi-major axis of the standard GEO orbit, in m;
- is the radius of the Earth, in m;
- is the mean right ascension, in rad;
- is the geocentric distance of the GEO satellite, in m.
2.3.2. Three-Body Gravitational Perturbation Term
- Subscript “k” indicates the three-body gravitational perturbation term, dimensionless;
- is the distance from the three-body perturbation term to the center of the Earth, in m;
- is the Earth’s gravitational coefficient, dimensionless;
- is the average angular velocity of three-body motion, in rad/s;
- is the angle of the trisolaris and the satellite at the center of the Earth, in rad;
- is the geocentric distance of the GEO satellite, in m.
- is the mean distance from the center of the Earth to the center of the Sun, in m;
- is the average angular velocity of Sun’s motion, in rad/s;
- is the angular velocity of the apparent motion of the Sun around the Earth, in rad/s.
- is the mean distance from the center of the Earth to the center of the Moon, in m;
- is the average angular velocity of the Moon’s motion, in rad/s;
- is the angular velocity of the apparent motion of the Moon around the Earth, in rad/s.
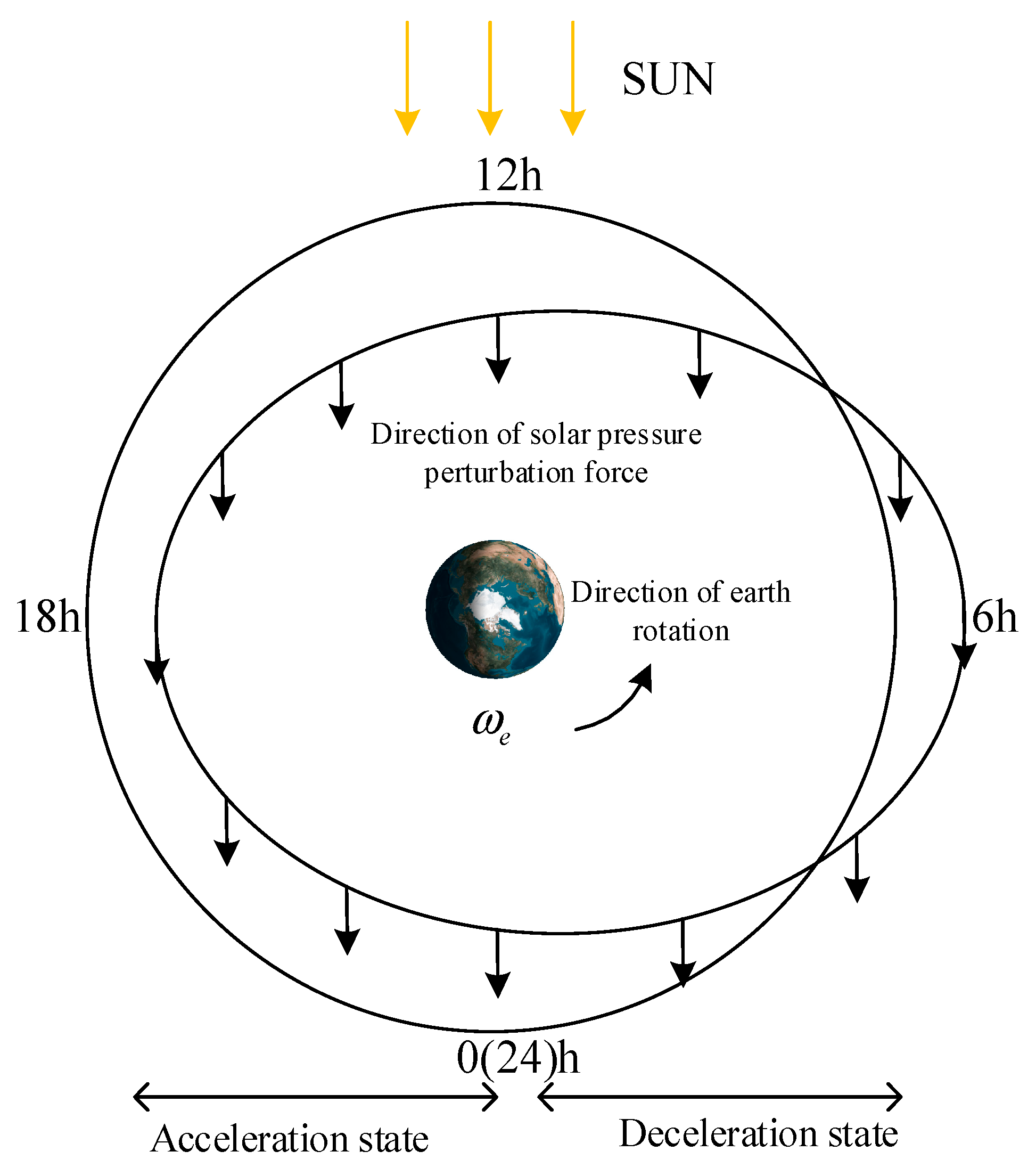
2.3.3. Solar Pressure Perturbation
- Subscript “P” indicates the solar pressure perturbation term;
- is the solar pressure coefficient, dimensionless;
- is the area of the satellite to the Sun, dimensionless;
- is the solar radiation pressure per square meter of sunlit area, dimensionless;
- is the mass of the satellite, in kg;
- is the X-axis component of the center of mass of the Sun in the geocentric inertial frame (after normalization), in m;
- is the Y-axis component of the center of mass of the Sun in the geocentric inertial frame (after normalization), in m;
- is the Z-axis component of the center of mass of the Sun in the geocentric inertial frame (after normalization), in m;
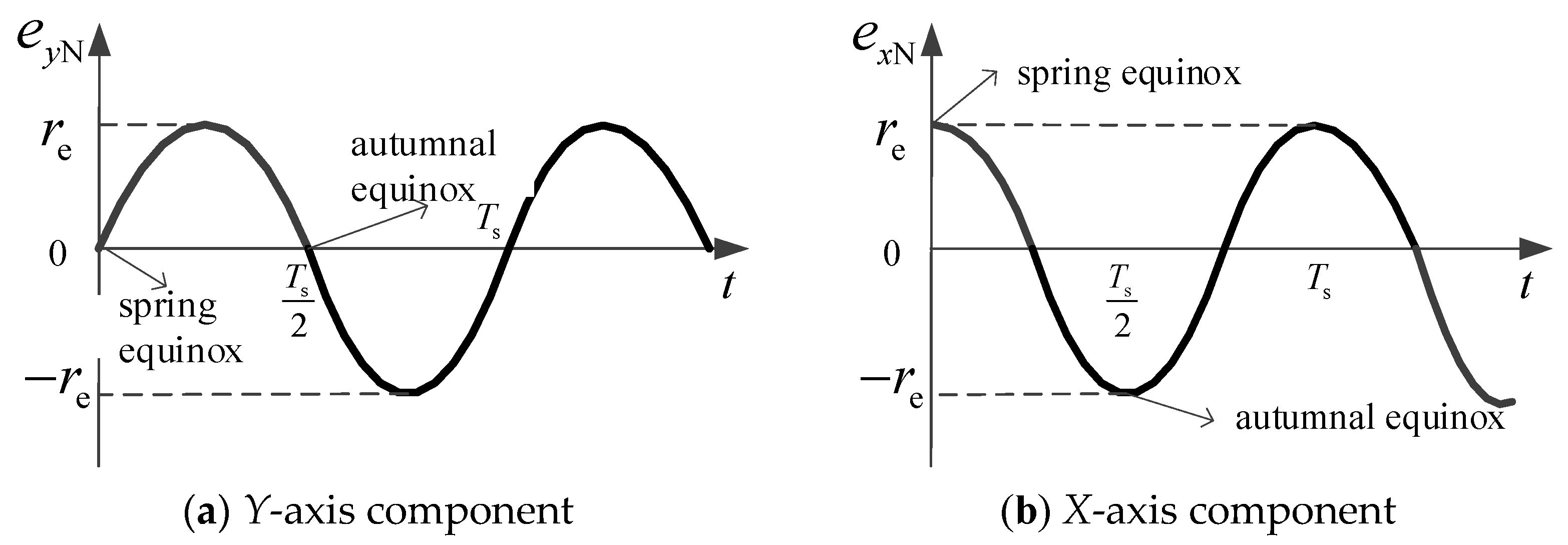
- From Formula (20), it can be obtained that the long period (annual period) motion of the eccentricity vector caused by the solar pressure perturbation is as follows:
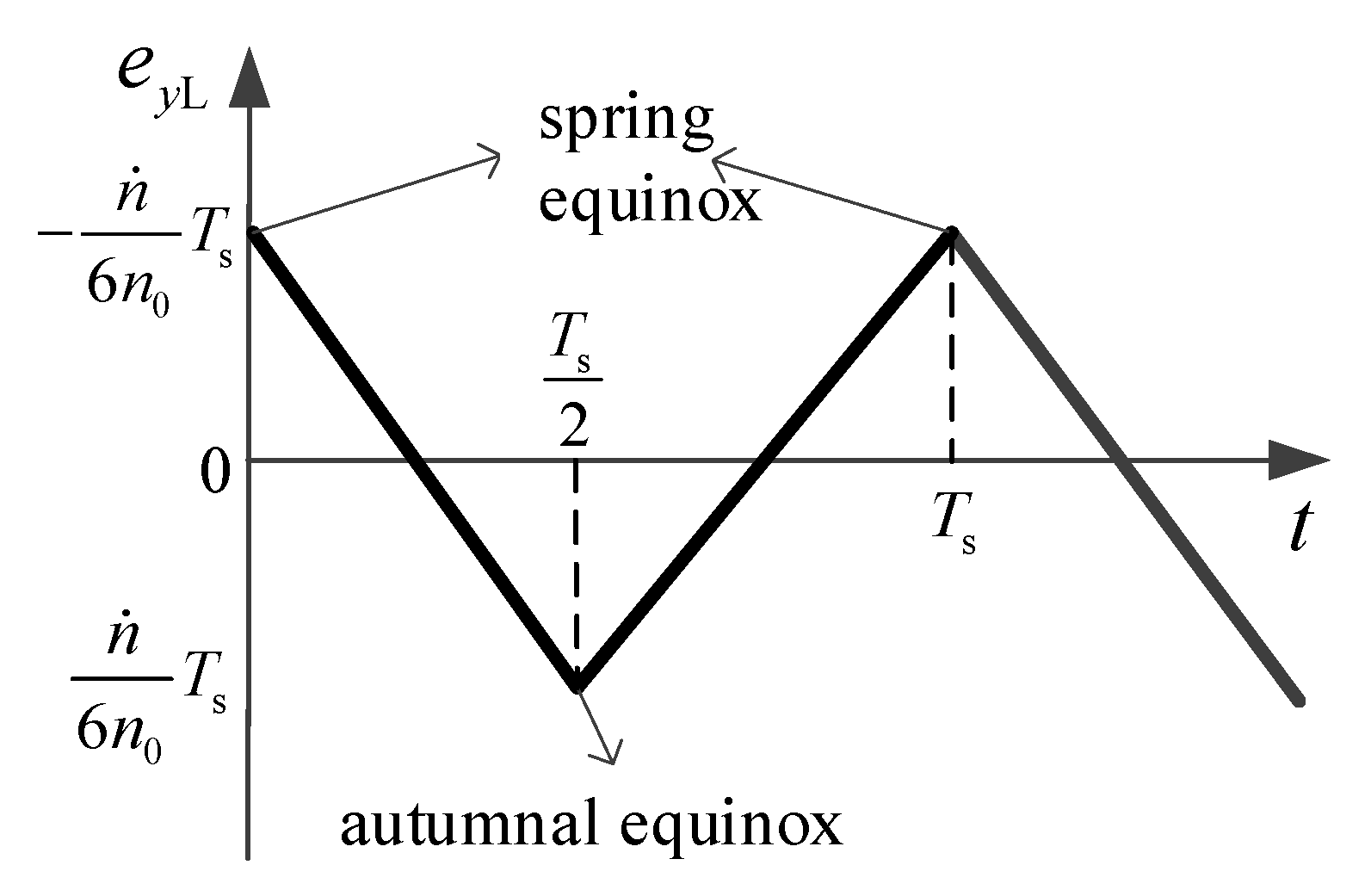
- From Formula (20), it can be obtained that the short period (diurnal period) motion of the eccentricity vector caused by the solar pressure perturbation is as follows:
3. Eccentricity Keeping Method
3.1. Eccentricity Keeping Strategy
3.2. Eccentricity Vector in Uncontrolled State
3.3. Eccentricity Vector under the Action of Mean Longitude Keeping
3.4. Nominal Eccentricity Vector
3.5. Eccentricity Adjustment Control Law
- is the radial velocity increment generated by orbital control;
- is the tangential velocity increment generated by orbital control;
- is the average linear velocity of the GEO satellite.
- (1)
- According to the control amount on the ground, to determine whether the eccentricity needs to be adjusted on the day;
- (2)
- According to the control amount, the satellite will automatically decide whether to perform an adjustment of the eccentricity on the day;
- (3)
- To perform eccentricity adjustment periodically (such as once a year) on the ground/on-satellite.
4. Simulation
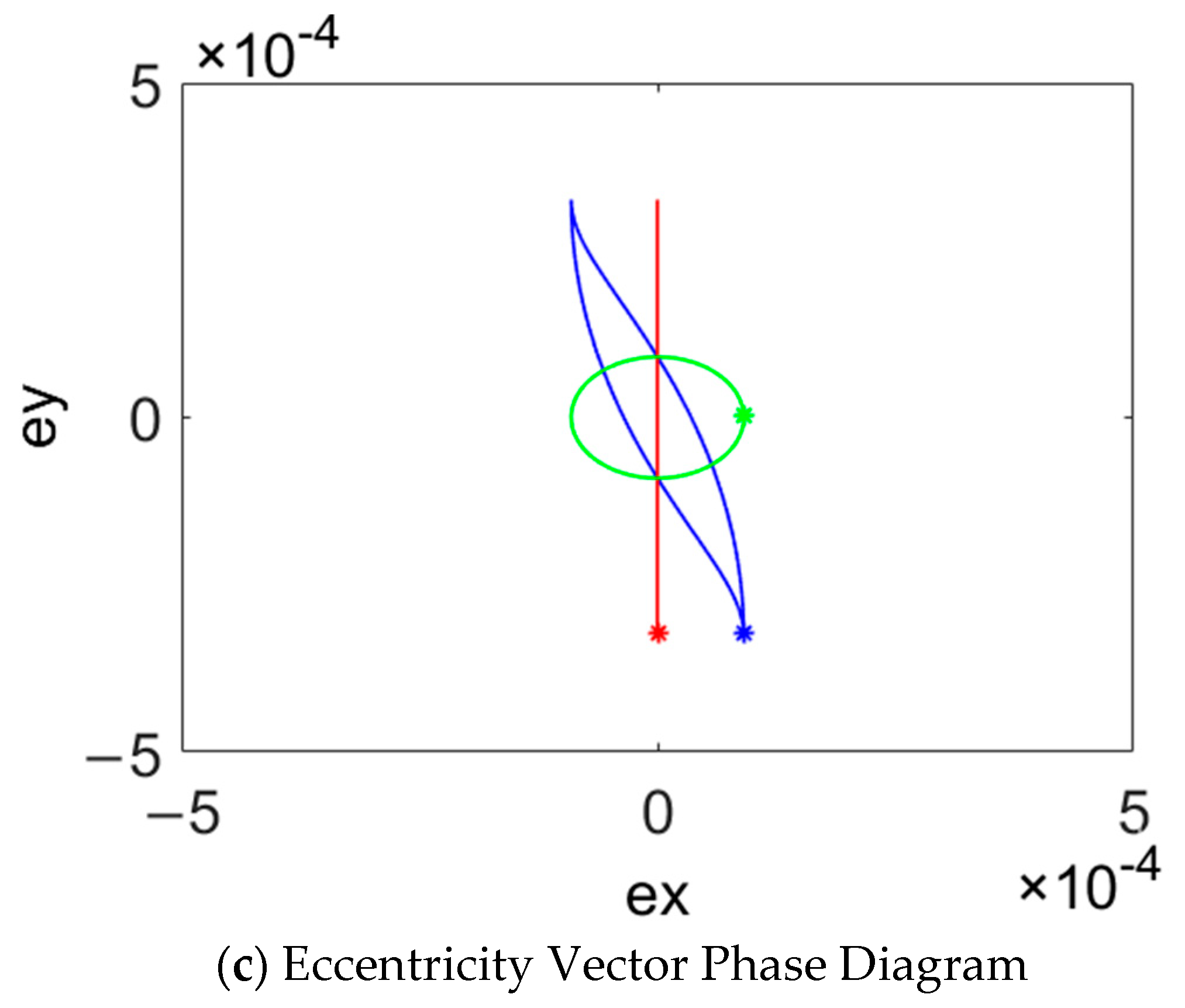
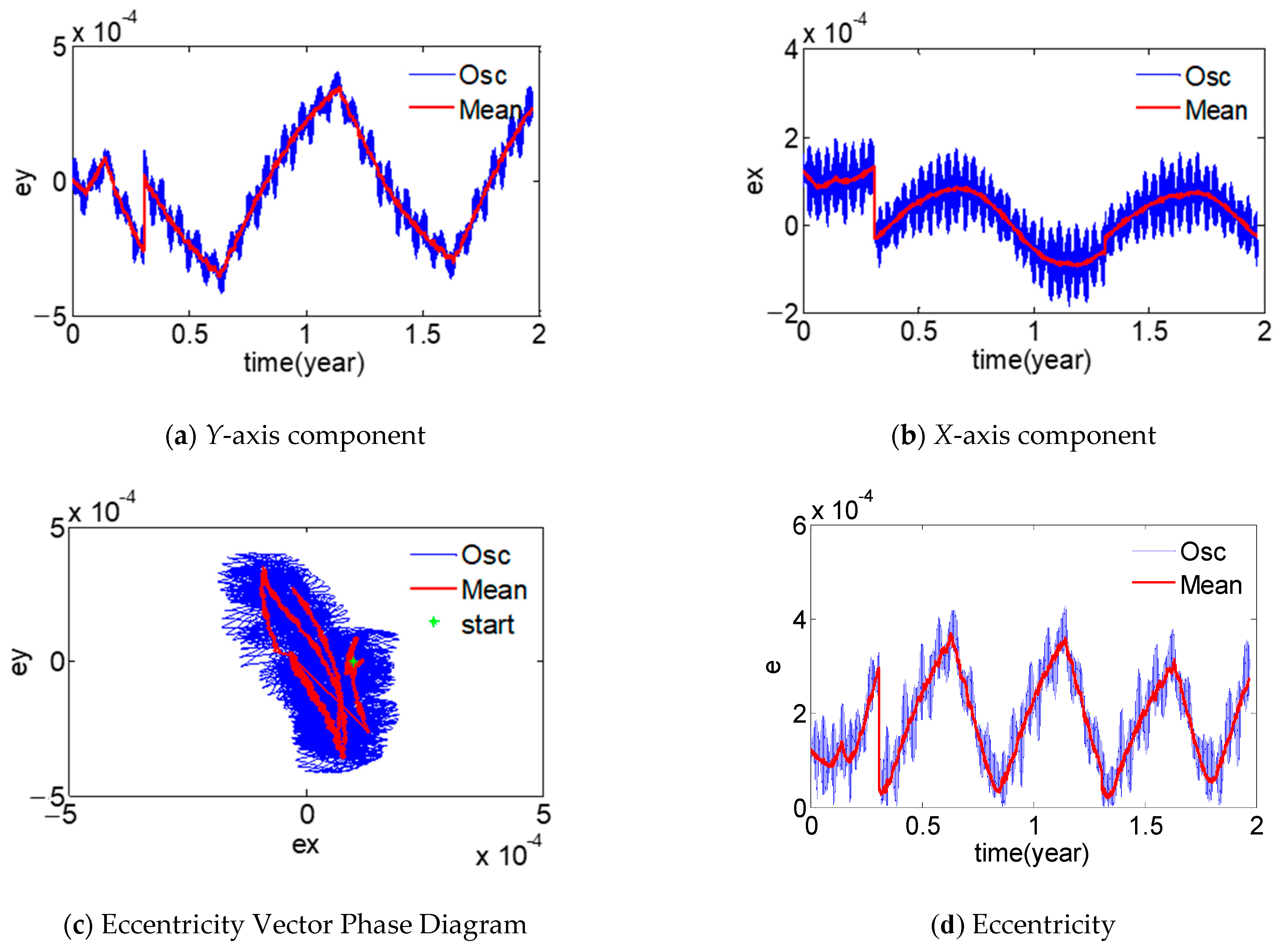
4.1. Eccentricity Vector Simulation
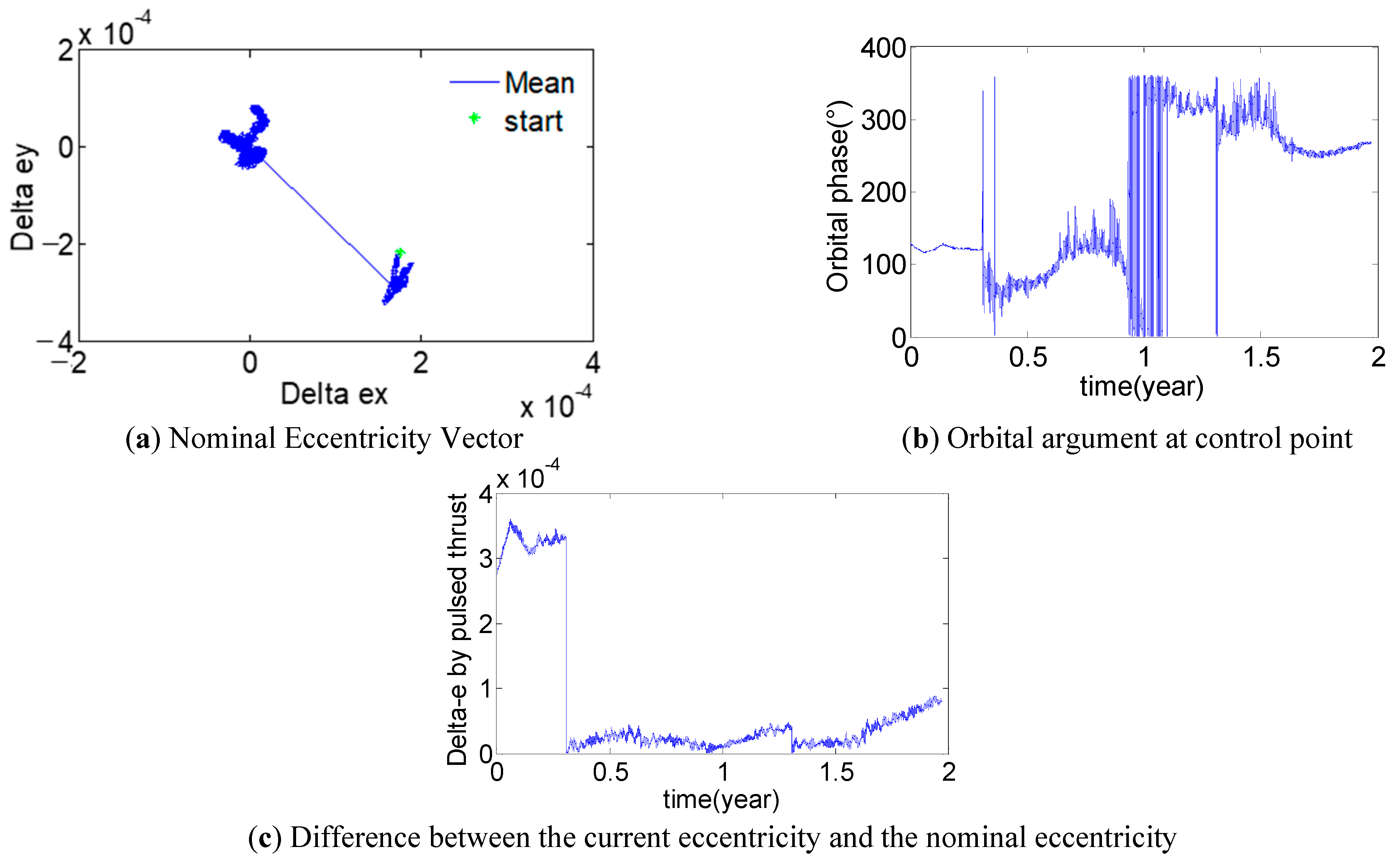
4.2. Eccentricity Control Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chao, C.C. Applied Orbit Perturbation and Maintenance; The Aerospace Press: El Segundo, CA, USA, 2005. [Google Scholar]
- Wang, Z.C.; Xing, G.H.; Zhang, H.W. Handbook of Geostationary Orbits; National Defense Industry Press: Beijing, China, 1999. [Google Scholar]
- Zhang, N. High-Precision Positioning Technology for Geostationary Orbit Satellites. Ph.D. Thesis, Tsinghua University, Beijing, China, 2017. [Google Scholar]
- Li, H.N. Geostationary Satellite Orbit and Co-Location Control Technology, 1st ed.; National Defense Industry Press: Beijing, China, 2010; pp. 61–64. [Google Scholar]
- Li, H.N.; Gao, Y.J.; Yu, P.J. Research on GEO Co-location Control Strategy. Chin. J. Astronaut. 2009, 30, 967–973. [Google Scholar]
- Park, B.K.; Tahk, M.J.; Bang, H.C.; Choi, S.B. Station Collocation Design algorithm for Multiple Geostationary Satellites Operation. J. Spacecr. Rockers 2003, 40, 889–893. [Google Scholar]
- Li, J.C.; An, J.W. Co-location isolation strategy based on orbital eccentricity and orbital inclination vector square root. Spacecr. Eng. 2009, 18, 20–24. [Google Scholar]
- Shi, S.B.; Dong, G.L.; Luo, Q. Orbit maintenance strategy for GEO co-located satellites based on isolation in the tangent plane. Shanghai Aerosp. 2009, 3, 47–55. [Google Scholar]
- Shi, S.B.; Han, Q.L.; Lv, B.T. Optimal control of east-west orbit maintenance for GEO co-located satellites. Shanghai Aerosp. 2011, 2, 43–49. [Google Scholar]
- Li, Y.H. Principles and Implementation Strategies of Orbit Maintenance for Geostationary Communication Satellites. J. Aircr. Meas. Control 2003, 22, 53–61. [Google Scholar]
- Li, Y.H.; Wei, W.; Yi, K.C. Calculation and Engineering Implementation of Orbit Control Parameters of On-orbit Geostationary Satellites. Acta Space Sci. 2007, 27, 72–76. [Google Scholar]
- Chen, Z.J.; Li, Y.H. Optimization method of east-west position keeping strategy for bias momentum satellites. Shanghai Aerosp. 2011, 28, 37–41. [Google Scholar]
- No, T.S. Simple Approach to East-West Station Keeping of Geosynchronous spacecraft. J. Guid. Control Dyn. 1999, 22, 734–736. [Google Scholar] [CrossRef]
- Yang, W.B.; Li, S.Y.; Li, N. Station-Keeping Control Method for GEO Satellite based on Relative Orbit Dynamics. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014. [Google Scholar]
- Yang, W.B.; Li, S.Y.; Li, N. Station-Keeping Control Method for High Orbit Spacecraft Based on Autonomous Control Architecture. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013. [Google Scholar]
- Vinod, K.; Hari, B.H. Autonomous Formation Keeping of Geostationary Satellites with Regional Navigation Satellites and Dynamics. J. Guid. Control Dyn. 2017, 40, 53–57. [Google Scholar]
- Chang, J.S.; Li, Q.J.; Yuan, Y. East-west position keeping strategy of continuous equally spaced pulse thrust for geostationary satellites. Space Control Technol. Appl. 2013, 39, 24–32. [Google Scholar]
- Possner, M.P.; Almendra, M.; Garcia, G. A New Flight Dynamics Solution for Operations of the Boeing 702 Satellite. In Proceedings of the AIAA Space 2008 Conference & Exposition, San Diego, CA, USA, 9–11 September 2008. [Google Scholar]
- Feuerborn, S.A.; Neary, D.A.; Perkins, J.M. Finding a way: Boeing’s All Elecric Propulsion Satellite. In Proceedings of the 49th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, San Jose, CA, USA, 14–17 July 2013. [Google Scholar]
- Weiss, A.; Cairano, D. Station Keeping and Momentum Management of Low-thrust Satellites Using MPC. Aerosp. Sci. Technol. 2018, 76, 229–241. [Google Scholar] [CrossRef]
- Lin, S.Y.; Li, M.; Yang, Z. Position maintenance and momentum wheel unloading control of electric propulsion satellites based on model prediction and orbit recursion. In Proceedings of the 4th Annual Conference on High Resolution Earth Observation, Wuhan, China, 17–18 September 2017. [Google Scholar]
- Caverly, R.; Cairano, D.; Weiss, A. Split-Horizon MPC for Coupled Station Keeping, Attitude Control, and Momentum Management of GEO Satellites using ElectricPropulsion. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018. [Google Scholar]
- Weiss, A.; Kalabic, U.; Cairano, S. Model Predictive Control for Simultaneous Station keeping and Momentum Management of Low-thrust Satellites. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015. [Google Scholar]
- Walsh, A.; Cairano, D.; Weiss, A. MPC for coupled station keeping, attitude control, and momentum management of low-thrust geostationary satellites. In Proceedings of the 2016 Annual American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Frederik, J.; Bruijn, D. Geostationary Satellite Station-Keeping Using Convex Optimization. J. Guid. Control Dyn. 2015, 39, 605–616. [Google Scholar]
- Gazzino, C.; Arzelier, D.; Cerri, L.; Losa, D.; Louembet, C.; Pittet, C. A Three-step Decomposition Method for Solving the Minimum-fuel Geostationary Station Keeping of Satellites Equipped with Electric Propulsion. Acta Astronatica 2019, 158, 12–22. [Google Scholar] [CrossRef] [Green Version]
- Gazzino, C.; Arzelier, D.; Losa, D.; Louembet, C.; Pittet, C.; Cerri, L. Optimal Control for Minimum-fuel Geostationary Station Keeping of Satellites Equipped with Electric Propulsion. IFAC Pap. Online 2016, 49, 379–384. [Google Scholar] [CrossRef]
- Gazzino, C.; Louembet, C.; Arzelier, D.; Jozefowiez, N.; Losa, D.; Pittet, C.; Cerri, L. Interger Programming for Optimal Control of Geostationary Station Keeping of Low-thrust Satellites. In Proceedings of the 20th IFAC World Congress 2017, Toulouse, France, 9–14 July 2017. [Google Scholar]
- Gazzino, C.; Arzelier, D.; Louembet, C.; Cerri, L.; Pittet, C.; Losa, D. Long-Term Electric-Propulsion Geostationary Station-Keeping via Integer Programming. J. Guid. Control Dyn. 2019, 42, 976–991. [Google Scholar] [CrossRef]
- Sukhanov, A.A.; Prado, A.F. On one Approach to the Optimization of Low-thrust Station Keeping Manoeuvres. Adv. Space Res. 2012, 50, 1478–1488. [Google Scholar] [CrossRef]
- Roth, M. Strategies for Geostationary Spacecraft Orbit SK Using Electrical Propulsion Only. Ph.D. Thesis, Czech Technical University, Prague, Czech Republic, 2020. [Google Scholar]
- Ye, L.; Liu, C.; Zhu, W.; Yin, H.; Liu, F.; Baoyin, H. North/south Station Keeping of the GEO Satellites in Asymmetric Configuration by Electric Propulsion with Manipulator. Mathematics 2022, 10, 2340. [Google Scholar] [CrossRef]
- Liu, F.; Ye, L.; Liu, C.; Wang, J.; Yin, H. Micro-thrust, Low-fuel Consumption, and High-precision East/west Station Keeping for GEO Satellites based on Synovial Variable Structure Control. Mathematics 2023, 11, 705. [Google Scholar] [CrossRef]
- Kuai, Z. Z Research on GEO Satellite Orbit Maintenance and Orbit Transfer Strategy under Pulse and EP. Ph.D. Thesis, University of Science and Technology of China, Hefei, China, 2017. [Google Scholar]
- Ye, L.; Wang, J.; Baoyin, H. Constellation maintenance and capture of sun-synchronous frozen orbits. Space Control Technol. Appl. 2021, 47, 24–32. [Google Scholar]
- Yin, J.; He, Q.; Han, C. Collision analysis of spacecraft relative motion based on relative orbital elements. J. Aeronaut. Astronaut. 2011, 32, 311–320. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Orbital start time (UTC) | 2025-8-1 12:00:00 |
| Orbital semi-major axis (km) | 42166.300 |
| Eccentricity | 0.0001 |
| Inclination (°) | 0.08 |
| Argument of perigee (°) | 0 |
| Right ascending ascension node (°) | 359.989 |
| Mean anomaly (°) | 251.361 |
| Mean longitude (°) | 121.019 |
| Area of the satellite to the Sun (m2) | 18 |
| Satellite mass (kg) | 3000 |
| Solar pressure coefficient | 1.3 |
| Solar radiation pressure (N/m2) | 4.56 × 10−6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, L.; Liu, C.; Liu, F.; Zhang, W.; Baoyin, H. The Low Fuel Consumption Keeping Method of Eccentricity under Integrated Keeping of Inclination-Longitude. Aerospace 2023, 10, 135. https://doi.org/10.3390/aerospace10020135
Ye L, Liu C, Liu F, Zhang W, Baoyin H. The Low Fuel Consumption Keeping Method of Eccentricity under Integrated Keeping of Inclination-Longitude. Aerospace. 2023; 10(2):135. https://doi.org/10.3390/aerospace10020135
Chicago/Turabian StyleYe, Lijun, Chunyang Liu, Fucheng Liu, Wenzheng Zhang, and Hexi Baoyin. 2023. "The Low Fuel Consumption Keeping Method of Eccentricity under Integrated Keeping of Inclination-Longitude" Aerospace 10, no. 2: 135. https://doi.org/10.3390/aerospace10020135
APA StyleYe, L., Liu, C., Liu, F., Zhang, W., & Baoyin, H. (2023). The Low Fuel Consumption Keeping Method of Eccentricity under Integrated Keeping of Inclination-Longitude. Aerospace, 10(2), 135. https://doi.org/10.3390/aerospace10020135