
Survey on Mission Planning of Multiple Unmanned Aerial Vehicles



Abstract
:1. Introduction
2. Task Assignment of Multi-UAV
- (1)
- Changes in target quantity or characteristics: The number of targets may vary as the mission is performed. Some targets may be destroyed, or some new ones may be detected. And the intelligence gathered earlier about the targets may also be inaccurate. Depending on the new scenario, tasks need to be reassigned.
- (2)
- Variation in the number or status of UAV formation: During the execution of the mission, UAVs may be attacked and no longer suitable for the assigned mission. Sometimes changes in the flight path caused by dynamic scenes make the UAV more suitable for other tasks. It is necessary to reassign tasks according to the variation.
- (1)
- Formation principle: It can be a single objective function or multiple objective functions. Commonly used functions are time consumption, economic consumption, the proceeds from performing tasks, etc.
- (2)
- Task assignment algorithm: What calls for special attention is the coupling among tasks and the robustness in uncertain environments.
- (3)
- Path planning algorithm: The ability of path conflict avoidance is required in cluttered environment. And the reliability of the cooperative guidance law also deserves attention.
- (4)
- Leave-join formation management: The formation needs to have the ability to resist disturbance and reconfigure.
2.1. Target Assignment Based on Mathematical Programming Algorithm
2.2. Target Assignment Based on Heuristic Algorithm (HA)
2.3. Target Assignment Based on Negotiation Algorithm
2.4. Task Assignment Based on Neural Networks (NN)
3. Cooperative Path Planning (CPP) for Multi-UAV
- (1)
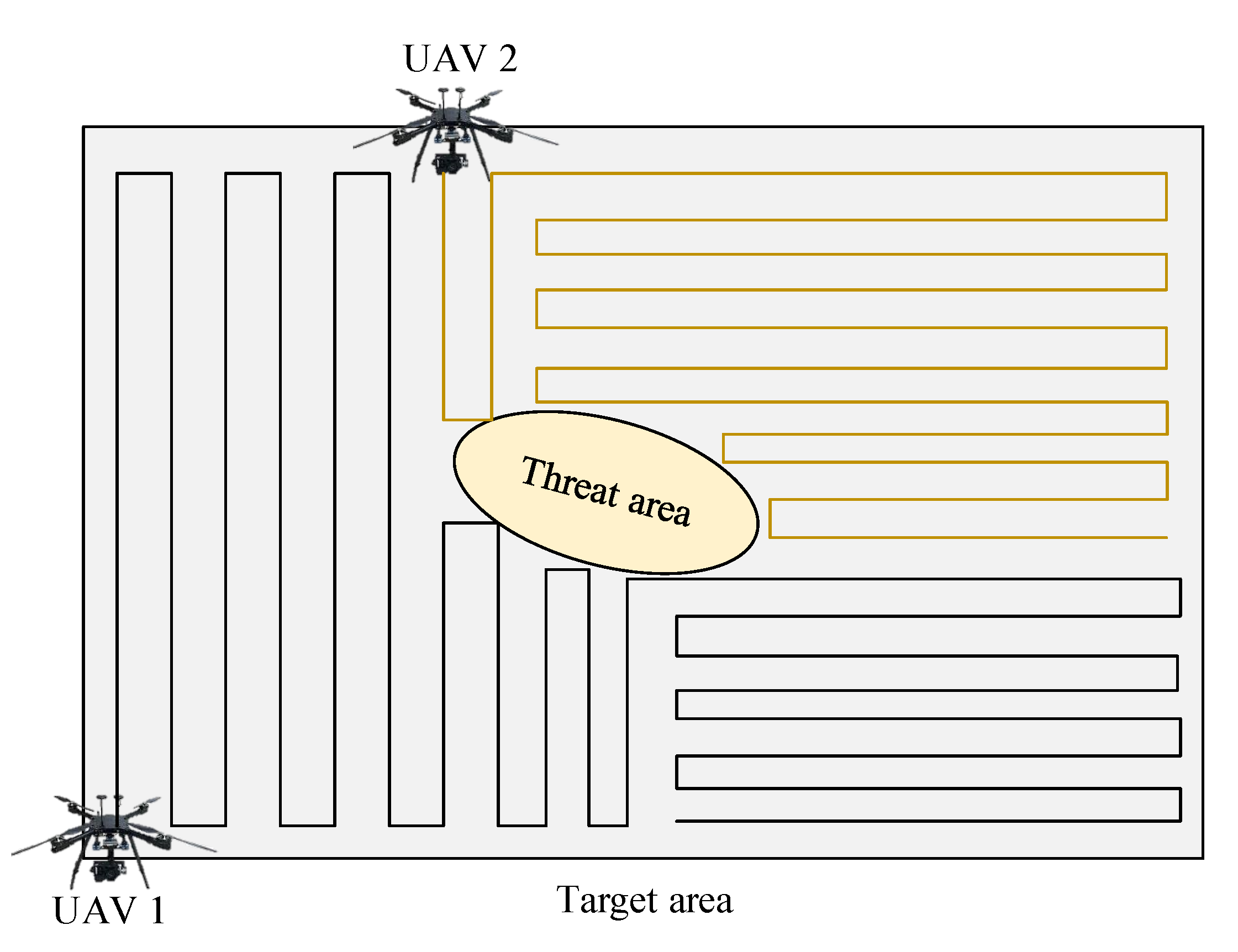
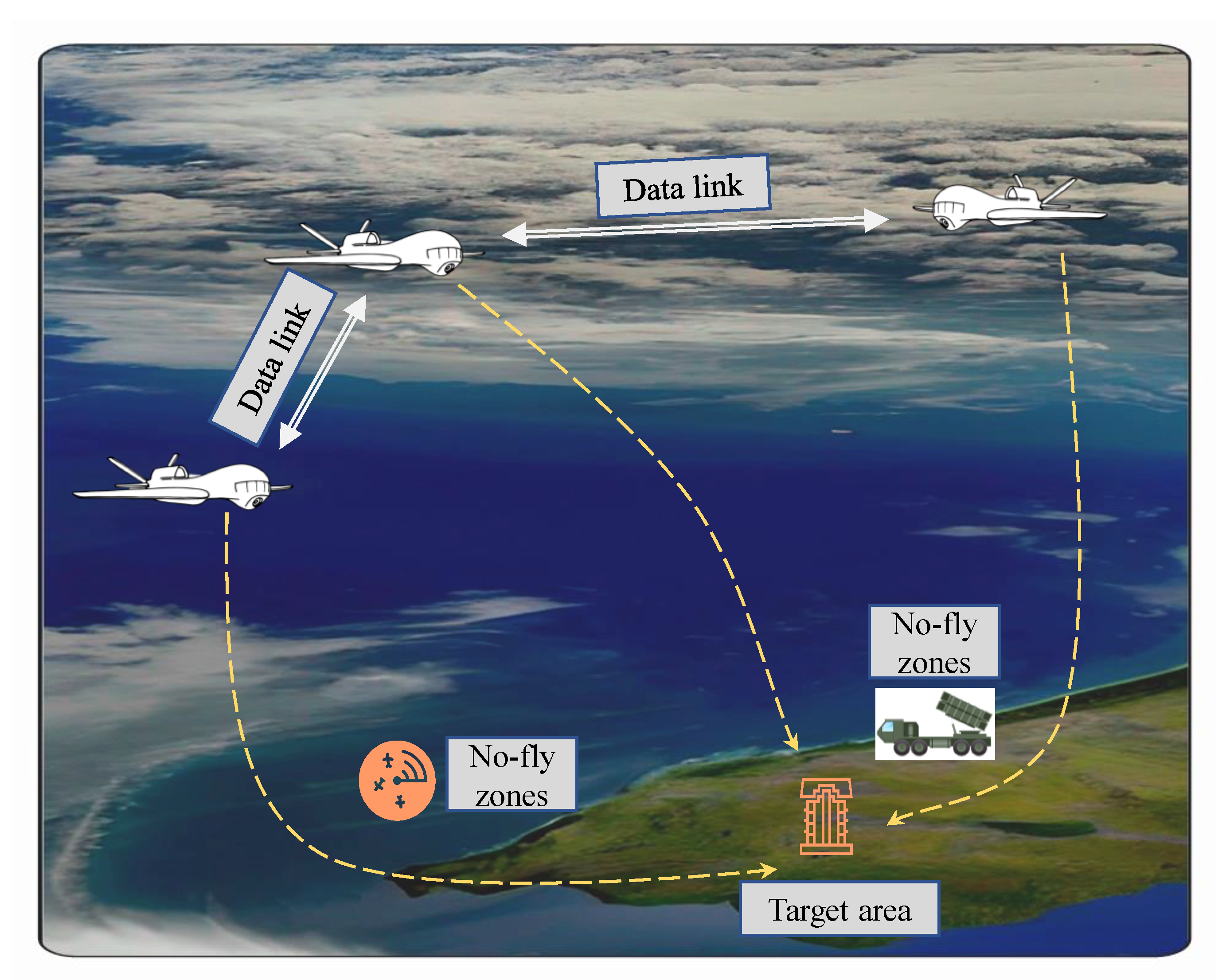
- 2D coverage: It means a UAV group conducts a blanket search or surveillance of an area. In such missions, UAV’s power consumption and the coverage area are limited. Multi-UAV can complete tasks through the division of labor.
- (2)
- 3D cooperation: Paths are planned in three-dimensional space, usually with time or line-of-sight angle as the coordinating variable, to achieve simultaneous or sequential strikes. Commonly used methods to coordinate time are: adjusting flight speed and adjusting the length of the flight path.
- (3)
- 4D space-time cooperation: Different from the above-mentioned 3D cooperation, 4D space-time cooperation plans the position of UAVs at each moment, which can more accurately adjust the arrival time and achieve higher space utilization. However, due to the increased time degree of freedom, the scale and the difficulty of problem-solving are higher.
3.1. Path Planning in 2D Coverage Tasks
- (1)
- Maneuverability constraints: When performing path planning, the UAV’s maneuverability, such as the turning radius, is usually not considered. This will affect the final coverage. Furthermore, the heterogeneity of UAVs, such as different mobility and sensing capability should also be taken seriously.
- (2)
- Environmental constraints: When designing the algorithm, not only static no-fly zones, but also dynamic obstacles in the environment should be considered to avoid potential danger.
- (3)
- Task constraints: Given the complexity of tasks, some task constraints also need to be considered, such as certain areas need to be scouted from a specified angle, etc.
3.2. Path Planning in 3D Cooperation
3.2.1. Time-Coordinated Path Planning
3.2.2. Space-Coordinated Path Planning
3.3. Path Planning in 4D Space-Time Cooperation
4. The Key Issues
4.1. Online Target Assignment in Dynamic Environment
4.2. Coupling among Missions
- (1)
- Order constraints: In some scenarios, tasks have different priorities and need to be executed simultaneously or sequentially.
- (2)
- Time window constraints: In practical application, some missions need to be completed within a certain time window.
4.3. Collision Avoidance between UAVs
4.4. Strong Robust Cooperative Guidance Law
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Multi-UAV | Multiple Unmanned Aerial Vehicles |
| MPP | Mission Planning Problem |
| UAVs | Unmanned Aerial Vehicles |
| NP | Nondeterminism Polynomial |
| EA | Exact Algorithm |
| B&B | Branch-and-Bound |
| HA | Heuristic Algorithm |
| SI | Swarm Intelligence |
| PSO | Particle Swarm Optimization |
| CNP | Contract Net Protocol |
| CBAA | Consensus-Based Auction Algorithm |
| CBBA | Consensus-Based Bundle Algorithm |
| CBGA | Consensus-Based Grouping Algorithm |
| NN | Neural Networks |
| RL | Reinforcement Learning |
| MODRL | Multi-Objective Deep Reinforcement Learning |
| PPO | Proximal Policy Optimization |
| CPP | Cooperative path planning |
| 2D | 2 Dimension |
| 3D | 3 Dimension |
| 4D | 4 Dimension |
| MPC | Model Predictive Control |
| LSTM | Long Short-Term Memory |
Symbols
| I | aggregation of UAVs |
| J | aggregation of tasks |
| task assignment flag | |
| the reward obtained | |
| numbers of UAVs | |
| numbers of tasks | |
| F | total proceeds |
| cost of time or economy | |
| H | total cost of the formation |
| maximum number of tasks assigned to UAV i | |
| minimum number of UAVs assigned to the task j | |
| maximum number of UAVs assigned to the task j |
References
- Basilico, N.; Carpin, S. Deploying teams of heterogeneous UAVs in cooperative two-level surveillance missions. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 610–615. [Google Scholar]
- Gong, Y.; Chen, K.; Niu, T.; Liu, Y. Grid-Based coverage path planning with NFZ avoidance for UAV using parallel self-adaptive ant colony optimization algorithm in cloud IoT. J. Cloud Comput. 2022, 11, 29. [Google Scholar] [CrossRef]
- Cabreira, T.M.; Ferreira, P.R.; Di Franco, C.; Buttazzo, G.C. Grid-based coverage path planning with minimum energy over irregular-shaped areas with UAVs. In Proceedings of the IEEE 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, Georgia, USA, 11–14 June 2019; pp. 758–767. [Google Scholar]
- Valente, J.; Del Cerro, J.; Barrientos, A.; Sanz, D. Aerial coverage optimization in precision agriculture management: A musical harmony inspired approach. Comput. Electron. Agric. 2013, 99, 153–159. [Google Scholar] [CrossRef] [Green Version]
- Cesetti, A.; Frontoni, E.; Mancini, A.; Ascani, A.; Zingaretti, P.; Longhi, S. A visual global positioning system for unmanned aerial vehicles used in photogrammetric applications. J. Intell. Robot. Syst. 2011, 61, 157–168. [Google Scholar] [CrossRef]
- Maza, I.; Caballero, F.; Capitán, J.; Martínez-de Dios, J.R.; Ollero, A. Experimental results in multi-UAV coordination for disaster management and civil security applications. J. Intell. Robot. Syst. 2011, 61, 563–585. [Google Scholar] [CrossRef]
- Da Silva, L.C.B.; Bernardo, R.M.; De Oliveira, H.A.; Rosa, P.F. Multi-UAV agent-based coordination for persistent surveillance with dynamic priorities. In Proceedings of the IEEE 2017 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 31 May–2 June 2017; pp. 765–771. [Google Scholar]
- Campion, M.; Ranganathan, P.; Faruque, S. A review and future directions of UAV swarm communication architectures. In Proceedings of the 2018 IEEE International Conference on Electro/Information Technology (EIT), Rochester, MI, USA, 3–5 May 2018; pp. 0903–0908. [Google Scholar]
- Zhang, J.; Jiahao, X. Cooperative task assignment of multi-UAV system. Chin. J. Aeronaut. 2020, 33, 2825–2827. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Xu, J.L.; Wu, Z.R.; Ma, Y.H. Complex task assignment of heterogeneous UAVs under timing constraints. In Proceedings of the 2020 IEEE 16th International Conference on Control & Automation (ICCA), Sapporo, Japan, 9–11 October 2020; pp. 853–858. [Google Scholar]
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on computational-intelligence-based UAV path planning. Knowl.-Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Yao, W.; Qi, N.; Wan, N.; Liu, Y. An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles. Aerosp. Sci. Technol. 2019, 86, 455–464. [Google Scholar] [CrossRef]
- Huo, L.; Zhu, J.; Wu, G.; Li, Z. A novel simulated annealing based strategy for balanced UAV task assignment and path planning. Sensors 2020, 20, 4769. [Google Scholar] [CrossRef]
- Khamis, A.; Hussein, A.; Elmogy, A. Multi-robot task allocation: A review of the state-of-the-art. In Cooperative Robots and Sensor Networks 2015; Springer: Cham, Switzerland, 2015; pp. 31–51. [Google Scholar]
- Dong, X.; Yu, B.; Shi, Z.; Zhong, Y. Time-varying formation control for unmanned aerial vehicles: Theories and applications. IEEE Trans. Control Syst. Technol. 2014, 23, 340–348. [Google Scholar] [CrossRef]
- Mills-Tettey, G.A.; Stentz, A.; Dias, M.B. The Dynamic Hungarian Algorithm for the Assignment Problem with Changing Costs; Tech. Rep. CMU-RI-TR-07-27; Robotics Institute: Pittsburgh, PA, USA, 2007. [Google Scholar]
- Bektas, T. The multiple traveling salesman problem: An overview of formulations and solution procedures. Omega 2006, 34, 209–219. [Google Scholar] [CrossRef]
- Martin, J.G.; Frejo, J.R.D.; García, R.A.; Camacho, E.F. Multi-robot task allocation problem with multiple nonlinear criteria using branch and bound and genetic algorithms. Intell. Serv. Robot. 2021, 14, 707–727. [Google Scholar] [CrossRef]
- Ye, X.; Lei, Z.; Liu, K. Multi-UAV Task Assignment based on Satisficing Decision Algorithm. In Proceedings of the 2021 IEEE International Conference on Consumer Electronics and Computer Engineering (ICCECE), Guangzhou, China, 15–17 January 2021; pp. 439–442. [Google Scholar]
- Kurdi, H.; AlDaood, M.F.; Al-Megren, S.; Aloboud, E.; Aldawood, A.S.; Youcef-Toumi, K. Adaptive task allocation for multi-UAV systems based on bacteria foraging behaviour. Appl. Soft Comput. 2019, 83, 105643. [Google Scholar] [CrossRef]
- Tang, J.; Liu, G.; Pan, Q. A review on representative swarm intelligence algorithms for solving optimization problems: Applications and trends. IEEE/CAA J. Autom. Sin. 2021, 8, 1627–1643. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart. Particle swarm optimization: Developments, applications and resources. In Proceedings of the IEEE 2001 Congress on Evolutionary Computation (IEEE Cat. No. 01TH8546), Seoul, Republic of Korea, 27–30 May 2001; Volume 1, pp. 81–86. [Google Scholar]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S. An improved grey wolf optimizer for solving engineering problems. Expert Syst. Appl. 2021, 166, 113917. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef]
- Zhen, Z.; Chen, Y.; Wen, L.; Han, B. An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment. Aerosp. Sci. Technol. 2020, 100, 105826. [Google Scholar] [CrossRef]
- Geng, N.; Chen, Z.; Nguyen, Q.A.; Gong, D. Particle swarm optimization algorithm for the optimization of rescue task allocation with uncertain time constraints. Complex Intell. Syst. 2021, 7, 873–890. [Google Scholar] [CrossRef]
- Li, J.; Yang, F. Task assignment strategy for multi-robot based on improved Grey Wolf Optimizer. J. Ambient Intell. Humaniz. Comput. 2020, 11, 6319–6335. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, H.; Zhang, Y.; Gao, R.; Xu, Z.; Yang, J. Coordinated optimization algorithm combining GA with cluster for multi-UAVs to multi-tasks task assignment and path planning. In Proceedings of the 2019 IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, UK, 16–19 July 2019; pp. 1026–1031. [Google Scholar]
- Abualigah, L.; Diabat, A. A novel hybrid antlion optimization algorithm for multi-objective task scheduling problems in cloud computing environments. Clust. Comput. 2021, 24, 205–223. [Google Scholar] [CrossRef]
- Madni, S.H.H.; Latiff, M.S.A.; Ali, J.; Abdulhamid, S.M. Multi-objective-oriented cuckoo search optimization-based resource scheduling algorithm for clouds. Arab. J. Sci. Eng. 2019, 44, 3585–3602. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, X. UAV task allocation based on clone selection algorithm. Wirel. Commun. Mob. Comput. 2021, 2021, 5518927. [Google Scholar] [CrossRef]
- Song, B.D.; Park, H.; Park, K. Toward flexible and persistent UAV service: Multi-period and multi-objective system design with task assignment for disaster management. Expert Syst. Appl. 2022, 206, 117855. [Google Scholar]
- Li, M.; Yang, S.; Liu, X. Shift-based density estimation for Pareto-based algorithms in many-objective optimization. IEEE Trans. Evol. Comput. 2013, 18, 348–365. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Wang, Z.; Li, K.; Liao, X.; Hone, K.; Liu, X. Task allocation on layered multiagent systems: When evolutionary many-objective optimization meets deep Q-learning. IEEE Trans. Evol. Comput. 2021, 25, 842–855. [Google Scholar] [CrossRef]
- De Ryck, M.; Pissoort, D.; Holvoet, T.; Demeester, E. Decentral task allocation for industrial AGV-systems with resource constraints. J. Manuf. Syst. 2021, 59, 310–319. [Google Scholar] [CrossRef]
- Choi, H.L.; Brunet, L.; How, J.P. Consensus-based decentralized auctions for robust task allocation. IEEE Trans. Robot. 2009, 25, 912–926. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Zhao, Y.; Bai, S.; Yang, J.; Zhang, Y. Collaborative task allocation of heterogeneous multi-UAV based on improved CBGA algorithm. In Proceedings of the IEEE 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), Shenzhen, China, 13–15 December 2020; pp. 795–800. [Google Scholar]
- Hunt, S.; Meng, Q.; Hinde, C.; Huang, T. A consensus-based grouping algorithm for multi-agent cooperative task allocation with complex requirements. Cogn. Comput. 2014, 6, 338–350. [Google Scholar] [CrossRef] [Green Version]
- Bertuccelli, L.; Choi, H.L.; Cho, P.; How, J. Real-time multi-UAV task assignment in dynamic and uncertain environments. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 5776. [Google Scholar]
- Smith, R.G. The contract net protocol: High-level communication and control in a distributed problem solver. IEEE Trans. Comput. 1980, 29, 1104–1113. [Google Scholar] [CrossRef]
- Zhen, Z.; Wen, L.; Wang, B.; Hu, Z.; Zhang, D. Improved contract network protocol algorithm based cooperative target allocation of heterogeneous UAV swarm. Aerosp. Sci. Technol. 2021, 119, 107054. [Google Scholar] [CrossRef]
- Xie, T.; Guo, J.; Zhang, X.; Yu, J.; Zhang, Z. Mathematical Problems in Engineering Improved CNP-Method-Based Local Real-Time Cooperative Task Allocation of Heterogeneous Multi-UAV in Communication-Constrained Environment. Math. Probl. Eng. 2022, 2022, 6568334. [Google Scholar] [CrossRef]
- Kiran, B.R.; Sobh, I.; Talpaert, V.; Mannion, P.; Al Sallab, A.A.; Yogamani, S.; Pérez, P. Deep reinforcement learning for autonomous driving: A survey. IEEE Trans. Intell. Transp. Syst. 2021, 1–18. [Google Scholar] [CrossRef]
- Shin, J.; Badgwell, T.A.; Liu, K.H.; Lee, J.H. Reinforcement learning–overview of recent progress and implications for process control. Comput. Chem. Eng. 2019, 127, 282–294. [Google Scholar] [CrossRef]
- Gao, H.; Feng, J.; Xiao, Y.; Zhang, B.; Wang, W. A UAV-assisted Multi-task Allocation Method for Mobile Crowd Sensing. IEEE Trans. Mob. Comput. 2022. [Google Scholar] [CrossRef]
- Luo, W.; Lü, J.; Liu, K.; Chen, L. Learning-based policy optimization for adversarial missile-target assignment. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 52, 4426–4437. [Google Scholar] [CrossRef]
- Zhao, X.; Zong, Q.; Tian, B.; Zhang, B.; You, M. Fast task allocation for heterogeneous unmanned aerial vehicles through reinforcement learning. Aerosp. Sci. Technol. 2019, 92, 588–594. [Google Scholar] [CrossRef]
- Liu, D.; Dou, L.; Zhang, R.; Zhang, X.; Zong, Q. Multi-Agent Reinforcement Learning-Based Coordinated Dynamic Task Allocation for Heterogenous UAVs. IEEE Trans. Veh. Technol. 2022, 1–12. [Google Scholar] [CrossRef]
- Sullivan, C.J.; Bosanac, N. Using multi-objective deep reinforcement learning to uncover a pareto front in multi-body trajectory design. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Virtual Event, 9–12 August 2020. [Google Scholar]
- Buşoniu, L.; de Bruin, T.; Tolić, D.; Kober, J.; Palunko, I. Reinforcement learning for control: Performance, stability, and deep approximators. Annu. Rev. Control 2018, 46, 8–28. [Google Scholar] [CrossRef]
- Wu, Y.; Low, K.H.; Lv, C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target. IEEE Trans. Veh. Technol. 2020, 69, 6782–6787. [Google Scholar] [CrossRef]
- Zhang, H.; Xin, B.; Dou, L.h.; Chen, J.; Hirota, K. A review of cooperative path planning of an unmanned aerial vehicle group. Front. Inf. Technol. Electron. Eng. 2020, 21, 1671–1694. [Google Scholar] [CrossRef]
- Niu, Y.; Liu, T.; LI, J.; Shengde, J. Review on motion planning methods for unmanned aerial vehicle cooperative maneuvering flight in cluttered environment. J. Natl. Univ. Def. Technol. 2022. [Google Scholar]
- Balampanis, F.; Maza, I.; Ollero, A. Area decomposition, partition and coverage with multiple remotely piloted aircraft systems operating in coastal regions. In Proceedings of the IEEE 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 275–283. [Google Scholar]
- Barrientos, A.; Colorado, J.; Cerro, J.d.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Liu, K.; Yao, Y.; He, F. A Design Approach for Simultaneous Cooperative Interception Based on Area Coverage Optimization. Drones 2022, 6, 156. [Google Scholar] [CrossRef]
- Ghaddar, A.; Merei, A.; Natalizio, E. PPS: Energy-Aware grid-based coverage path planning for UAVs using area partitioning in the presence of NFZs. Sensors 2020, 20, 3742. [Google Scholar] [CrossRef]
- Xin, B.; Gao, G.Q.; Ding, Y.L.; Zhu, Y.G.; Fang, H. Distributed multi-robot motion planning for cooperative multi-area coverage. In Proceedings of the 2017 13th IEEE International Conference on Control & Automation (ICCA), Ohrid, Macedonia, 3–6 July 2017; pp. 361–366. [Google Scholar]
- Jeon, I.S.; Lee, J.I.; Tahk, M.J. Impact-time-control guidance law for anti-ship missiles. IEEE Trans. Control Syst. Technol. 2006, 14, 260–266. [Google Scholar] [CrossRef]
- Li, G.; Wu, Y.; Xu, P. Fixed-time cooperative guidance law with input delay for simultaneous arrival. Int. J. Control 2021, 94, 1664–1673. [Google Scholar] [CrossRef]
- Dong, W.; Wang, C.; Wang, J.; Zuo, Z.; Shan, J. Fixed-Time Terminal Angle-Constrained Cooperative Guidance Law Against Maneuvering Target. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 1352–1366. [Google Scholar] [CrossRef]
- Kang, S.; Wang, J.; Li, G.; Shan, J.; Petersen, I.R. Optimal cooperative guidance law for salvo attack: An MPC-based consensus perspective. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2397–2410. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, J.; Wang, C.; Shan, J.; Xin, M. A modified cooperative proportional navigation guidance law. J. Frankl. Inst. 2019, 356, 5692–5705. [Google Scholar] [CrossRef]
- Babel, L. Coordinated target assignment and UAV path planning with timing constraints. J. Intell. Robot. Syst. 2019, 94, 857–869. [Google Scholar] [CrossRef]
- Luo, Y.; Song, J.; Zhao, K.; Liu, Y. UAV-Cooperative Penetration Dynamic-Tracking Interceptor Method Based on DDPG. Appl. Sci. 2022, 12, 1618. [Google Scholar] [CrossRef]
- Jianglong, Y.; Xiwang, D.; Qingdong, L.; Zhang, R.; Jinhu, L. Cooperative guidance strategy for multiple hypersonic gliding vehicles system. Chin. J. Aeronaut. 2020, 33, 990–1005. [Google Scholar]
- Song, J.; Xu, X.; Tong, X.; Zhao, K. A Time Cooperation Guidance for Multi-Hypersonic Vehicles Based on LSTM Network and Improved Artificial Potential Field Method. Aerospace 2022, 9, 562. [Google Scholar] [CrossRef]
- Song, J.; Song, S.; Xu, S. Three-dimensional cooperative guidance law for multiple missiles with finite-time convergence. Aerosp. Sci. Technol. 2017, 67, 193–205. [Google Scholar] [CrossRef]
- Zhao, K.; Song, J.; Ai, S.; Xu, X.; Liu, Y. Active Fault-Tolerant Control for Near-Space Hypersonic Vehicles. Aerospace 2022, 9, 237. [Google Scholar] [CrossRef]
- Zhao, K.; Song, J.; Hu, Y.; Xu, X.; Liu, Y. Deep Deterministic Policy Gradient-Based Active Disturbance Rejection Controller for Quad-Rotor UAVs. Mathematics 2022, 10, 2686. [Google Scholar] [CrossRef]
- Shizhuang, W.; Xingqun, Z.; Yawei, Z.; Cheng, C.; Jiawen, S. Highly reliable relative navigation for multi-UAV formation flight in urban environments. Chin. J. Aeronaut. 2021, 34, 257–270. [Google Scholar]
- Shen, J.; Wang, S.; Zhan, X. Multi-UAV cluster-based cooperative navigation with fault detection and exclusion capability. Aerosp. Sci. Technol. 2022, 124, 107570. [Google Scholar] [CrossRef]
- Babel, L. Flight path optimization with application to in-flight replanning to changing destinations. Aircr. Eng. Aerosp. Technol. 2018, 90, 1192–1202. [Google Scholar] [CrossRef]
- Zhang, L.; Li, D.; Jing, L.; Ju, X.; Cui, N. Appointed-time cooperative guidance law with line-of-sight angle constraint and time-to-go control. IEEE Trans. Aerosp. Electron. Syst. 2022, 1–14. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, Y.; Liu, Z.; Wang, S.; Hu, X. Finite-time cooperative guidance strategy for impact angle and time control. IEEE Trans. Aerosp. Electron. Syst. 2020, 57, 806–819. [Google Scholar] [CrossRef]
- Guo, M.; Xia, G.; Yang, F.; Liu, C.; Liu, K.; Yang, J. Consensus Cooperative Encirclement Interception Guidance Law for Multiple Vehicles against Maneuvering Target. Appl. Sci. 2022, 12, 7307. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, X. Multiple missiles fixed-time cooperative guidance without measuring radial velocity for maneuvering targets interception. ISA Trans. 2022, 126, 388–397. [Google Scholar] [CrossRef]
- Teng, L.; Yue-yong, L.; Chuan-Jiang, L.; Yan-ning, G. Finite time cooperative guidance law for multiple missiles with line-of-sight angle constraint. Acta Armamentarii 2018, 39, 305. [Google Scholar]
- Ziyan, C.; Jianglong, Y.; Xiwang, D.; Zhang, R. Three-dimensional cooperative guidance strategy and guidance law for intercepting highly maneuvering target. Chin. J. Aeronaut. 2021, 34, 485–495. [Google Scholar]
- Liu, Z.; Wei, H.; Wang, H.; Li, H.; Wang, H. Integrated task allocation and path coordination for large-scale robot networks with uncertainties. IEEE Trans. Autom. Sci. Eng. 2021, 19, 2750–2761. [Google Scholar] [CrossRef]
- Basiri, A.; Mariani, V.; Silano, G.; Aatif, M.; Iannelli, L.; Glielmo, L. A survey on the application of path-planning algorithms for multi-rotor UAVs in precision agriculture. J. Navig. 2022, 75, 364–383. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, X.; Zhang, Y.; Xiangmin, G. Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach. Chin. J. Aeronaut. 2019, 32, 1504–1519. [Google Scholar]
- Vitale, C.; Papaioannou, S.; Kolios, P.; Ellinas, G. Autonomous 4D Trajectory Planning for Dynamic and Flexible Air Traffic Management. J. Intell. Robot. Syst. 2022, 106, 11. [Google Scholar] [CrossRef]
- Dai, W.; Pang, B.; Low, K.H. Conflict-free four-dimensional path planning for urban air mobility considering airspace occupancy. Aerosp. Sci. Technol. 2021, 119, 107154. [Google Scholar] [CrossRef]
- Yang, M.; Bi, W.; Zhang, A.; Gao, F. A distributed task reassignment method in dynamic environment for multi-UAV system. Appl. Intell. 2022, 52, 1582–1601. [Google Scholar] [CrossRef]
- Mahadevan, K.; Sousa, M.; Tang, A.; Grossman, T. “grip-that-there”: An investigation of explicit and implicit task allocation techniques for human-robot collaboration. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–14. [Google Scholar]
- Zhe, Z.; Yifeng, N.; Lincheng, S. Adaptive level of autonomy for human-UAVs collaborative surveillance using situated fuzzy cognitive maps. Chin. J. Aeronaut. 2020, 33, 2835–2850. [Google Scholar] [CrossRef]
- Bai, X.; Cao, M.; Yan, W.; Ge, S.S. Efficient routing for precedence-constrained package delivery for heterogeneous vehicles. IEEE Trans. Autom. Sci. Eng. 2019, 17, 248–260. [Google Scholar]
- Ye, F.; Chen, J.; Sun, Q.; Tian, Y.; Jiang, T. Decentralized task allocation for heterogeneous multi-UAV system with task coupling constraints. J. Supercomput. 2021, 77, 111–132. [Google Scholar] [CrossRef]
- Luis, C.E.; Vukosavljev, M.; Schoellig, A.P. Online trajectory generation with distributed model predictive control for multi-robot motion planning. IEEE Robot. Autom. Lett. 2020, 5, 604–611. [Google Scholar] [CrossRef] [Green Version]
- Qing, W.; Chen, H.; Wang, X.; Yin, Y. Collision-free Trajectory Generation for UAV Swarm Formation Rendezvous. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 6–9 December 2021; pp. 1861–1867. [Google Scholar]
- Chen, Y.; Guo, M.; Li, Z. Recursive Feasibility and Deadlock Resolution in MPC-based Multi-robot Trajectory Generation. arXiv 2022, arXiv:2202.06071. [Google Scholar]
- Hu, J.; Niu, H.; Carrasco, J.; Lennox, B.; Arvin, F. Fault-tolerant cooperative navigation of networked UAV swarms for forest fire monitoring. Aerosp. Sci. Technol. 2022, 123, 107494. [Google Scholar] [CrossRef]
- Ziquan, Y.; Zhang, Y.; Jiang, B.; Jun, F.; Ying, J. A review on fault-tolerant cooperative control of multiple unmanned aerial vehicles. Chin. J. Aeronaut. 2022, 35, 1–18. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task Assignment | Path Planning | |
|---|---|---|
| Constraints |
|
|
| Evaluation metrics |
|
|
| Challenges |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Zhao, K.; Liu, Y. Survey on Mission Planning of Multiple Unmanned Aerial Vehicles. Aerospace 2023, 10, 208. https://doi.org/10.3390/aerospace10030208
Song J, Zhao K, Liu Y. Survey on Mission Planning of Multiple Unmanned Aerial Vehicles. Aerospace. 2023; 10(3):208. https://doi.org/10.3390/aerospace10030208
Chicago/Turabian StyleSong, Jia, Kai Zhao, and Yang Liu. 2023. "Survey on Mission Planning of Multiple Unmanned Aerial Vehicles" Aerospace 10, no. 3: 208. https://doi.org/10.3390/aerospace10030208
APA StyleSong, J., Zhao, K., & Liu, Y. (2023). Survey on Mission Planning of Multiple Unmanned Aerial Vehicles. Aerospace, 10(3), 208. https://doi.org/10.3390/aerospace10030208