1. Introduction
Unlike GNSS (Global Navigation Satellite System), the navigation by the stellar refraction for a spacecraft is totally autonomous [
1,
2]. Compared with the navigation by the angular separation between a star and the Earth, for the other popular autonomous solution, only having the 1km-level positioning, the stellar refraction can achieve 100 m-level positioning [
3]. Hence, the navigation by the stellar refraction is crucial for a spacecraft, especially the LEO (Low-Earth-Orbit) satellite, to position autonomously and accurately.
The navigation by the stellar refraction was initially proposed for the Apollo spacecraft, although it was not implemented at that time [
4]. Later, the researchers from CSDL (Charles Stark Draper Laboratory) demonstrated that the navigation by the stellar refraction can achieve the 100 m-level positioning by fusing the tangent height derived from the refraction data with the spacecraft orbit data in a Kalman filter by simulations [
3]. It should be noted that the atmospheric density error was assumed to be no greater than 1.1% in the simulations, while the variation of the atmospheric density may be as large as or even greater than 10% in the stratosphere [
5,
6]. In order to reduce the impact of the atmospheric density variation on the stellar refraction, the altitude range of interest is usually limited from 20 km to 50 km [
7]. However, the inaccurate stratospheric density is still the biggest barrier to improve the navigation accuracy by the stellar refraction, which will be addressed in this paper.
The atmospheric density can be obtained by the direct method or the remote sensing. The direct method includes the drag-derived measurement by the LEO spacecraft [
8] and the measurement by the meteorological rocket and balloon [
9]. The atmospheric drag has been widely employed to derive the upper thermospheric density, but it cannot measure the stratospheric density [
8]. Although both the meteorological rocket and balloon can measure the stratospheric density accurately, it is very difficult for them to measure the density globally with a high resolution [
10]. The remote sensing includes the ground-based and the space-based. The ground-based remote sensing can be divided into the passive and the active. Compared with the passive remote sensing, the active remote sensing by LiDAR (Light Detection and Ranging) or Radar (Radio Detection and Ranging) can retrieve the atmospheric density at high spatial and temporal resolutions locally, but it is still difficult for it to obtain the density globally [
11,
12]. However, it is convenient for the space-based remote sensing, such as the GPS (Global Positioning System) radio occultation, to retrieve the atmospheric density globally [
13]. Therefore, the GPS radio occultation has been widely employed to obtain the atmospheric density profile from ground to the ionosphere at the high spatial and temporal resolutions globally [
14,
15]. The atmospheric density error retrieved by the GPS radio occultation is even less than 0.3% below 30 km, but the vertical resolution of the retrieval is limited by the diffraction, i.e., the diameter of the first Fresnel zone [
16]. At the GPS L1 wavelength of 19 cm, the vertical resolution of the retrieval is about 1.4km if the receiver is mounted on a LEO spacecraft, such as a 700 km altitude orbit satellite [
16]. Therefore, many efforts have been devoted to improve the vertical resolution of the retrieval by the GPS radio occultation [
17,
18].
In fact, the diameter of the first Fresnel zone is related to the wavelength [
16]. If the wavelength is reduced, the diffraction-limited vertical resolution of the retrieval will be improved accordingly. For example, if the wavelength is as short as 550 nm, the diffraction-limited vertical resolution will be as high as 2.5 m so that the diffraction will not be the limit to the vertical resolution of the retrieval anymore. The star occultation was employed to retrieve trace gas, such as aerosol and ozone, in the stratosphere [
19,
20]. However, the star occultation has not been used to retrieve the stratospheric density up to now. Hence, this paper will investigate the retrieval of the stratospheric density by the star occultation for the first time, which is the main contribution in this paper. The refracted rays of the starlight in the visible band will be sensed by a star sensor mounted on a LEO satellite. The star occultation is similar to the GPS radio occultation in principle, but the starlight’s wavelength is far shorter than the GPS signals. It should be noted that the retrieval of the atmospheric density by the star occultation is only applicable to the altitude range of 20–50 km, the interested range of the navigation by the stellar refraction.
The rest of the paper is organized as follows. The principle of the retrieval of the stratospheric density by the star occultation was provided first. The performance of the retrieval, including the spatial resolution and the atmospheric attenuation, was analyzed further. The retrieval accuracy was also studied. Simulations demonstrate the feasibility of the retrieval to some extent. Finally, the concluding remarks are summarized.
2. Retrieval of the Stratospheric Density by the Star Occultation
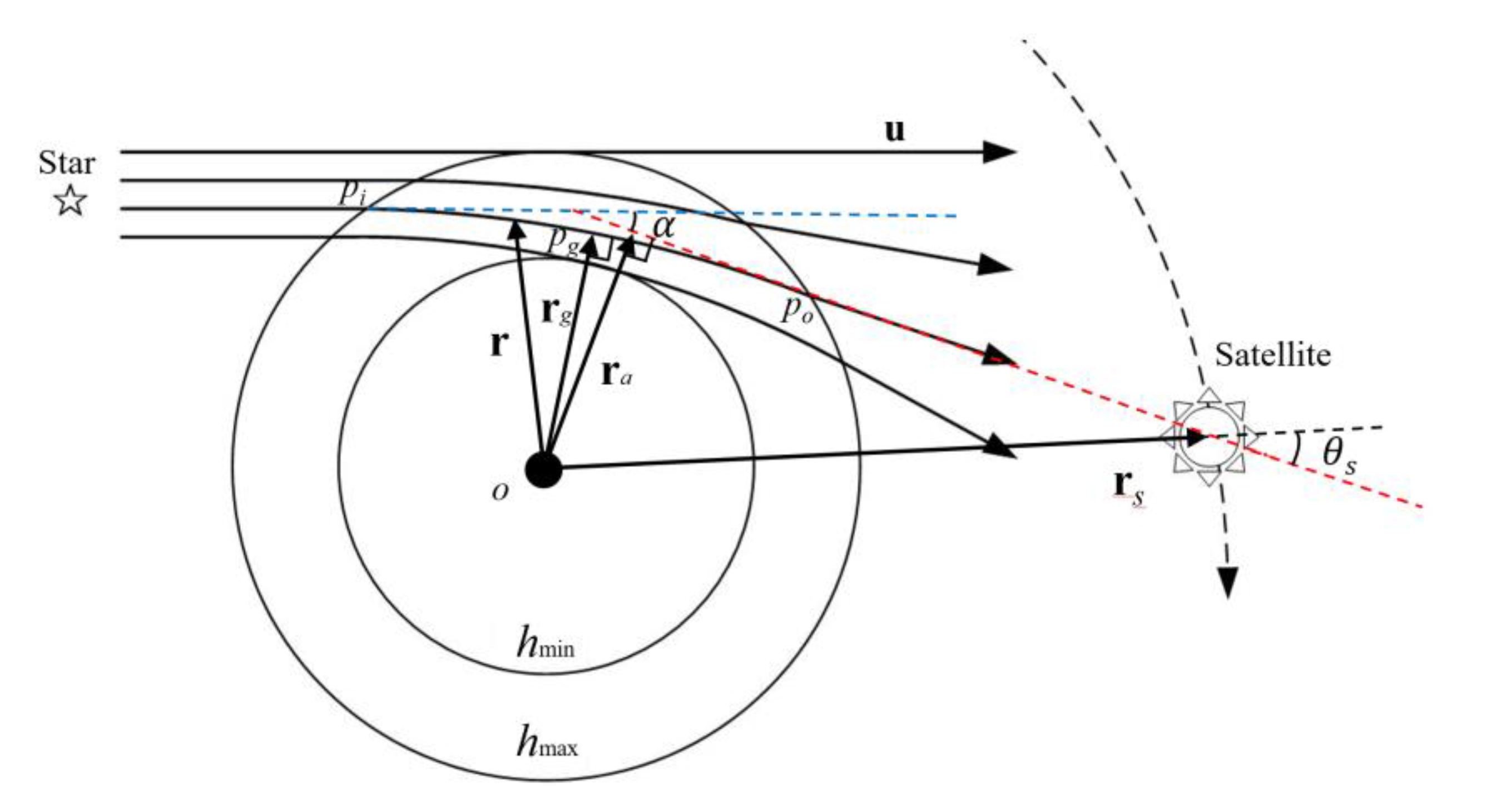
As illustrated in
Figure 1, when the rays of starlight pass through the atmosphere, they will be refracted. Take the ray, the lower second one illustrated in
Figure 1, as an example to describe its refraction. Before it enters the atmosphere, it passes along the direct path whose unit vector is
u, which will be called the direct starlight hereinafter. After it enters the atmosphere from the point
pi, it will be refracted by the atmosphere. It will bend down to the Earth before it passes through the tangent point
pg, the closest point to the Earth. The radius vector at the tangent point is
rg with the norm
rg, i.e.,
re +
hg, where
re and
hg are the Earth radius and the tangent height, respectively. The ray will bend up to the sky after it passes through the tangent point. It will pass out the atmosphere at the point
po. There is no impact of the atmosphere on the ray after the point
po. The radius vector
r is the direction from the Earth center to a point at the refracted path of the ray. The refraction angle,
, observed from the satellite, is the angle between the tangent at the point
pi, i.e., the vector
u, and that at the point
po, i.e., the apparent path. The satellite has the radius vector
rs and the zenith angle
θs. The vector
ra is the direction from the Earth center to its foot of a perpendicular at the apparent path. The norm of
ra is
ra =
re +
ha, where
ha is the apparent height viewed from the satellite.
The star occultation is the process of viewing the rays from the direct to the obstructed by the Earth. For one thing, the denser the atmosphere is, the larger the refraction angle is. Therefore, the refraction angle is large when the starlight is close to the ground, and vice versa. Although the large refraction angle is good for improving its observing accuracy, the lowest tangent height is usually set as 20 km for the stellar refraction since the atmospheric density close to the troposphere fluctuates significantly [
21]. The scintillation over 20 km due to internal gravity waves, turbulence, and other irregularities may impact on the stellar refraction to some extent, but its impact can be eased significantly by increasing the exposure time [
6]. The impact of scintillation will not be considered in this paper anymore. For another, the refraction angle is small when the starlight is far from the ground. If the refraction angle is too small to be sensed by the star sensor, the corresponding height will be the upper limit of the occultation in fact. Therefore, the star occultation refers to the process of viewing the refracted starlight in a range of the tangent height, [hmin, hmax], as illustrated in
Figure 1.
In
Figure 1, when a ray of the refracted starlight is viewed by a star sensor mounted on a LEO satellite, the refraction angle,
, can be derived as [
22],
where
is the index of refraction,
is the norm of the radius vector
r, and the subscript ‘g’ refers to the tangent point. In (1), the spherically stratified atmosphere is assumed. Using an Abelian transformation, (1) can be inverted as [
23],
where
and
. Since the atmosphere is assumed as the spherically stratified media, the ray obeys Snell’s law as [
22],
where
is the zenith angle of the ray measured from the radius vector. At the tangent point,
is 90°. Since the measurement is carried out from the LEO satellite at
,
, and the known
, (3) can be rewritten as,
where
is the norm of
rs and
ns is the refractive index at the satellite position. Substitute (4) into (2) and yield,
where
is the minimum apparent height of the ray and
is the apparent height of the direct starlight. If the values of
in the range of
are measured by the star sensor, the values of
can be retrieved by (5). Since there is a maximum height
in the occultation as mentioned above,
should be revised as
, the apparent height at the tangent height of
.
There is the Gladstone and Dale’s law as,
where
is the Gladstone–Dale coefficient related to the starlight wavelength
and
is the atmospheric density [
24]. According to (6),
can be derived from
linearly. That is, the atmospheric density can be retrieved by the measured refraction angle.
In the implementation, the refraction angles will be sampled discretely so that (5) should be discretized. Given that
samples of the refraction angle and the apparent height, i.e.,
, are obtained in the occultation. Let
. Assume that the refraction angle
is proportional to
approximately in a sampling interval as,
Substitute (7) into (5) and yield,
By substituting into (6), the atmospheric density can be derived. Obviously, there is the discretization error in (8). The smaller the sampling interval is, the less the discretization error is. In the following, the retrieval performance by measuring the refraction angle will be addressed in detail.
6. Simulations
Herein, the accuracy of the retrieval of the stratospheric density by the occultation will be verified by simulations comprehensively. The orbit listed in
Table 1 and the star sensor listed in
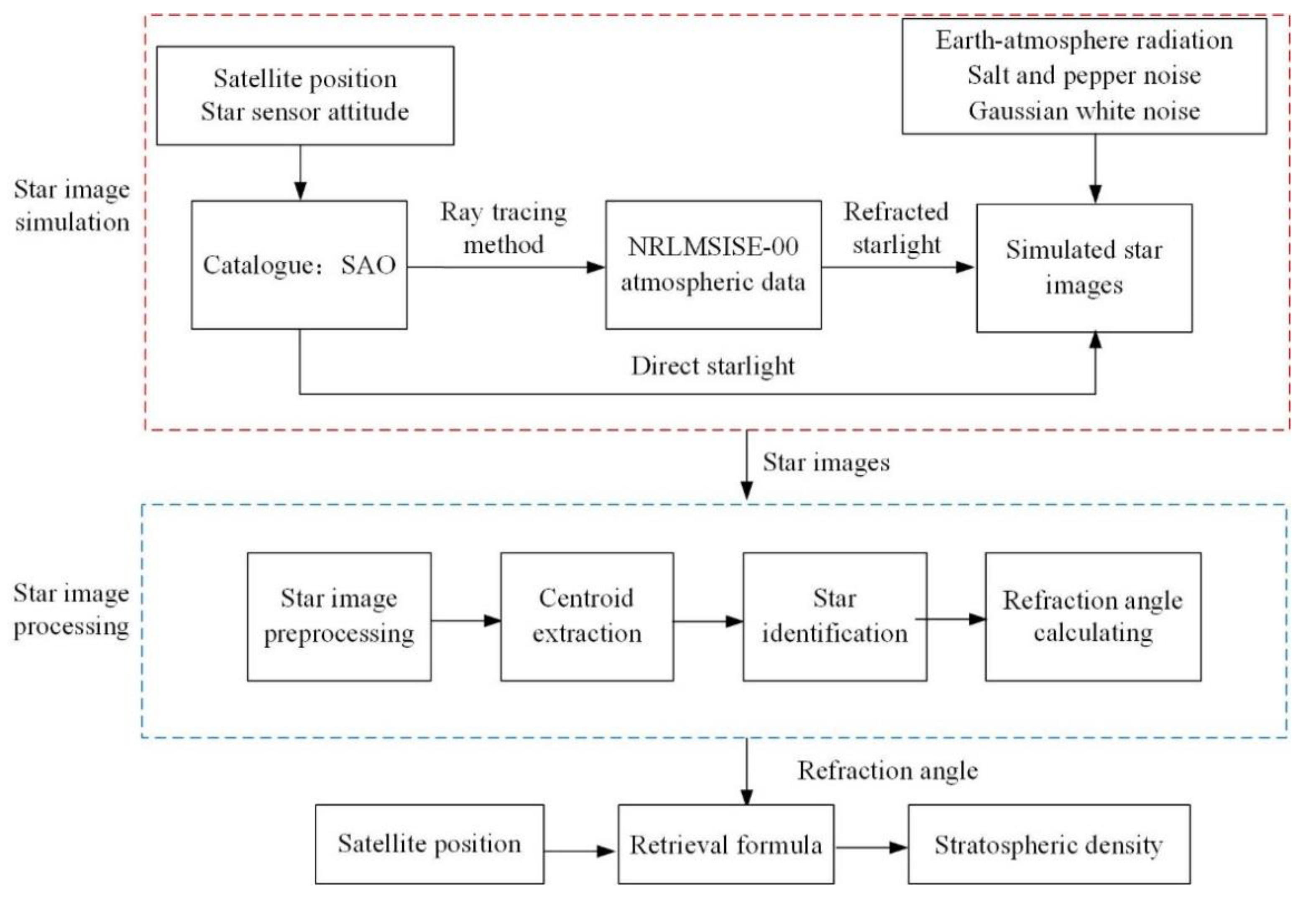
Table 2 are still employed in the following simulations. The flowchart of the simulations is illustrated in
Figure 14.
The NRLMSISE-00 data, whose resolutions in the latitude, the longitude, and the altitude directions were set as 0.5°, 0.5°, and 10 m, respectively, are treated as the reference, i.e., the real atmospheric data.
The star images are simulated using the SAO (Smithsonian Astrophysical Observatory) star catalogue J2000. As listed in
Table 2, only the stars with the magnitude no greater than 7 Mv were simulated. The rays of the refracted starlight are simulated by the ray tracing method. The attenuation due to the refractive dispersion, the molecular scattering, and the ozone absorption were considered in simulating the refracted stars. Except for the Gaussian white noise and the salt-and-pepper noise, the earth–atmosphere radiation was also simulated in the star images.
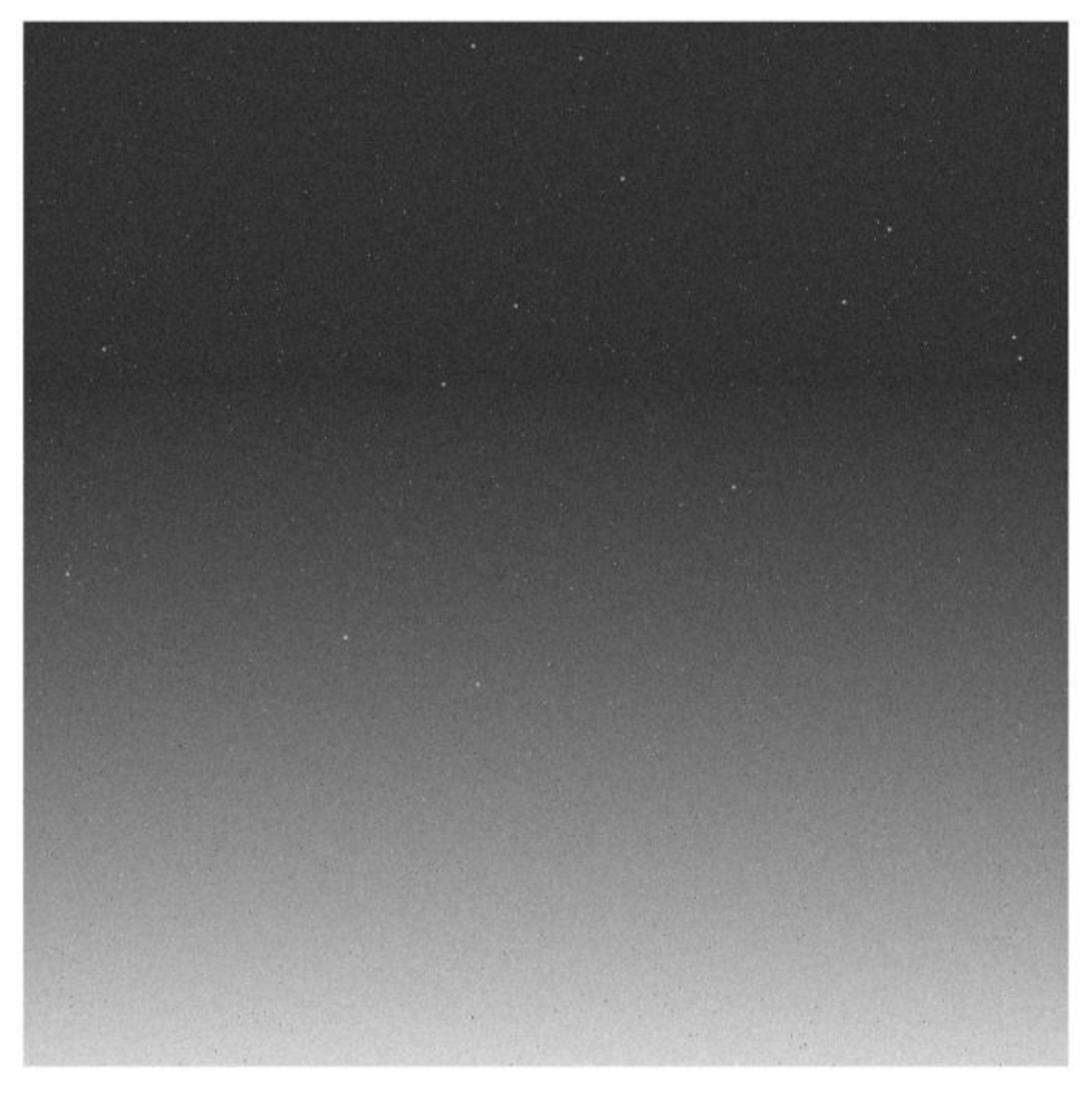
Figure 15 depicts a simulated star image output by the star sensor. The white points in the image are the viewed stars. In the upper part of the image, the background is black since there is no impact of the atmosphere. The starlights in the upper part are not refracted, but those in the lower part are refracted and attenuated by the atmosphere. Since the lowest part of the image is close to the ground, some starlights are blocked. The refracted starlights are attenuated by the atmosphere either. The simulated atmospheric radiation from the Earth to space in the visible band of the star sensor makes the lower part of the image white. There is both Gaussian white noise and salt-and-pepper noise in the image.
The simulated images were processed to acquire the refraction angle. Both the refraction angle and the satellite position were used to retrieve the stratospheric density.
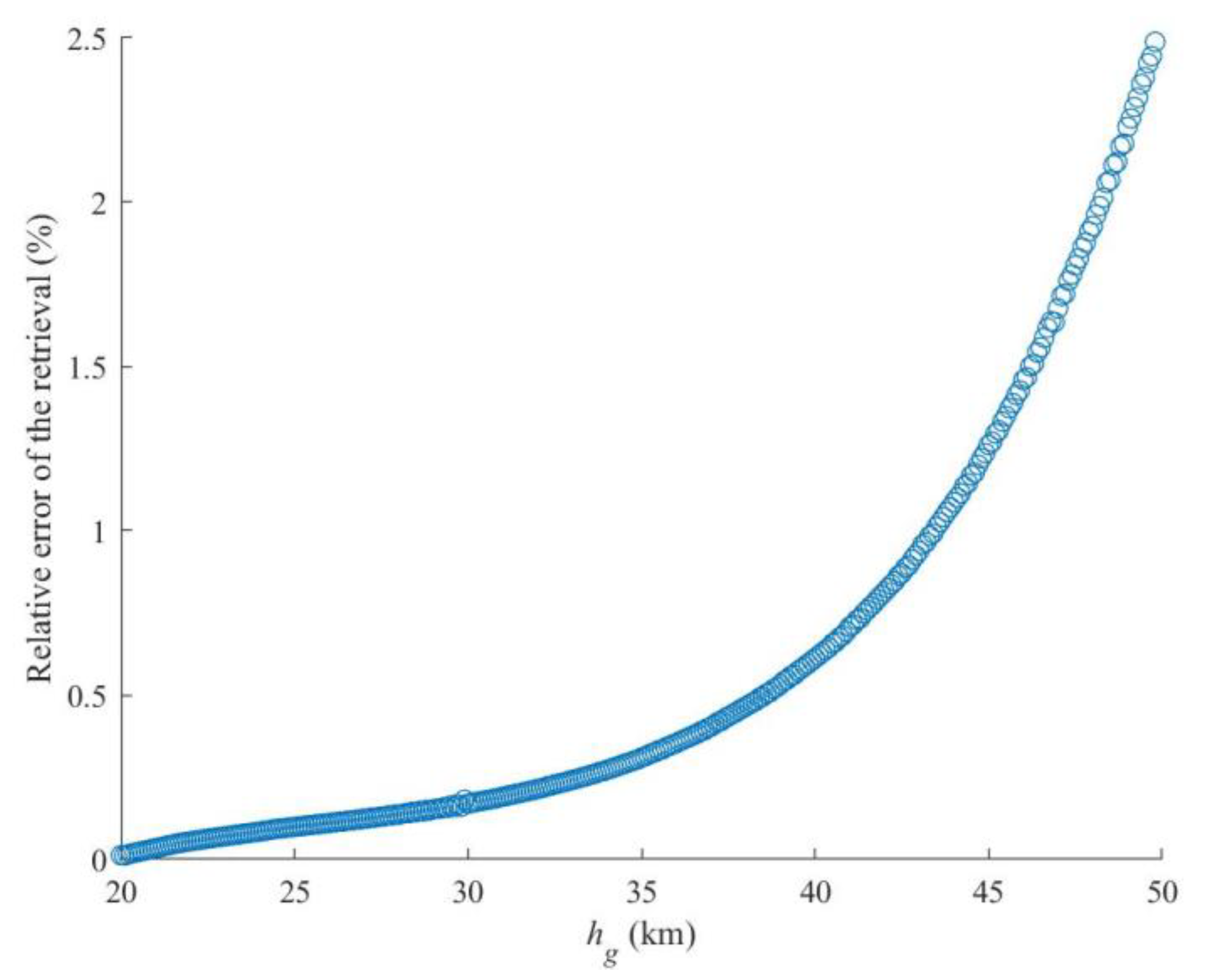
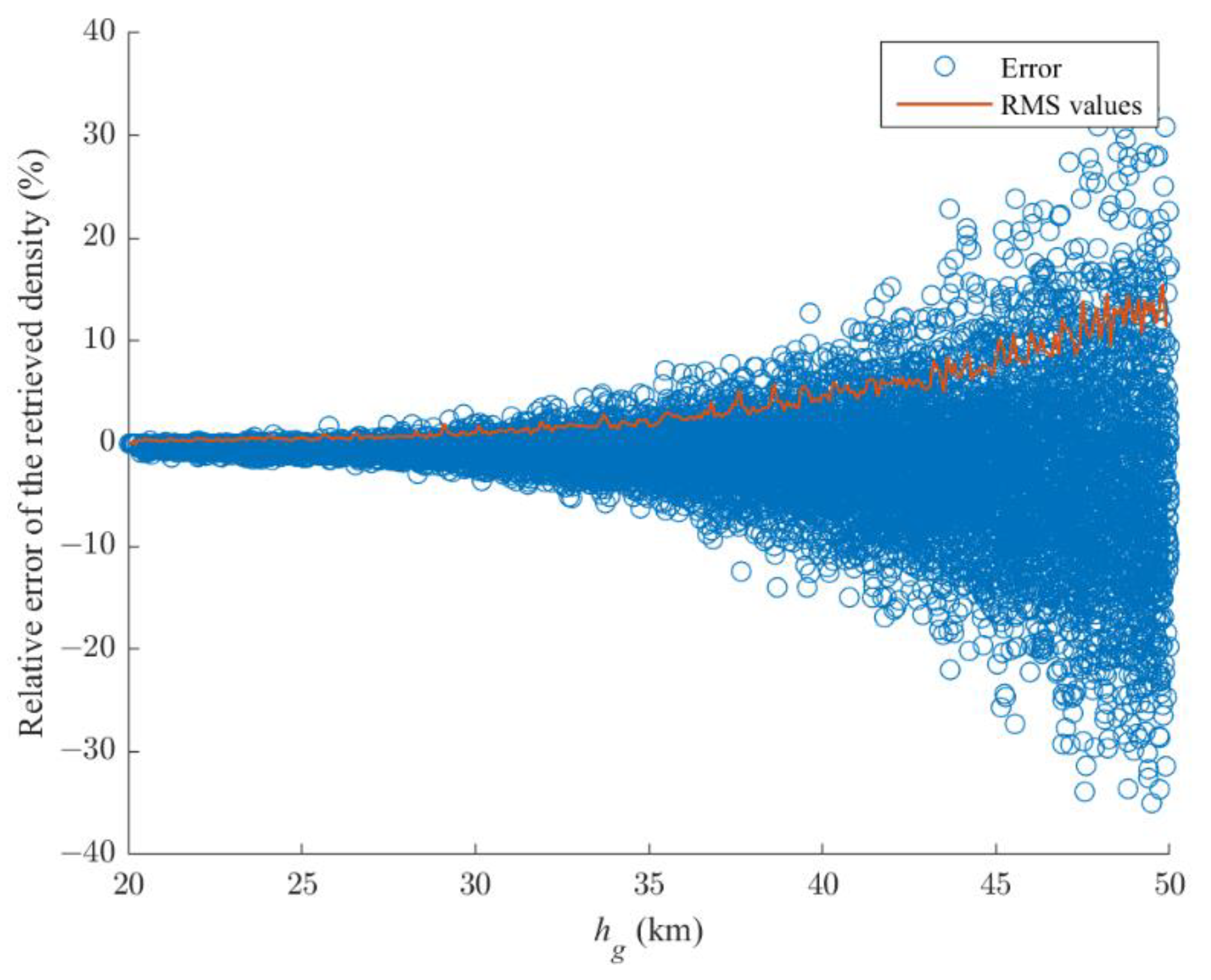
Figure 16 depicts the relative error of the retrieved density with the tangent height by the Monte Carlo simulation. In total, 10,000 simulations were run to acquire the 10,000 relative error curves in
Figure 16. The RMS values were also plotted in
Figure 16.
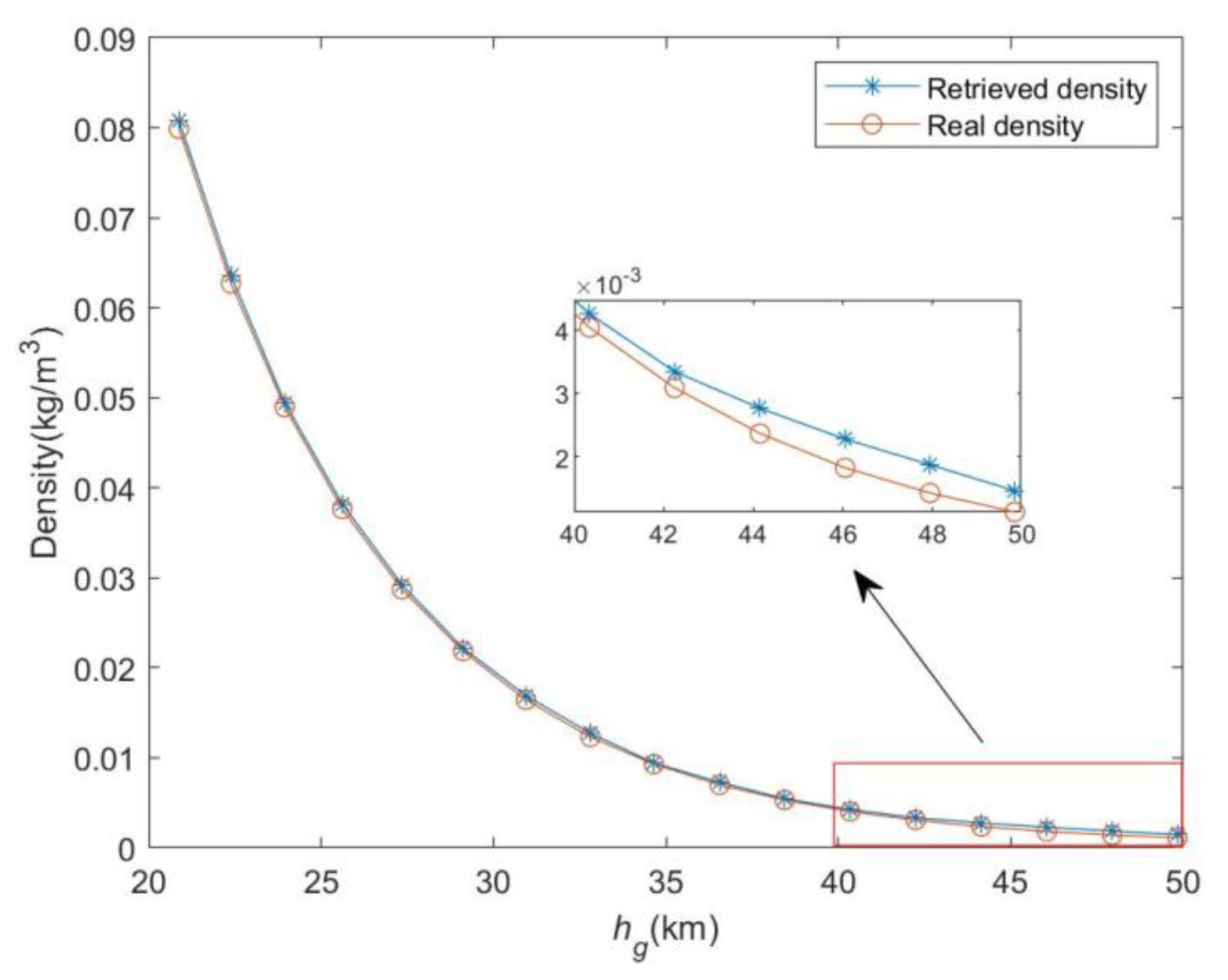
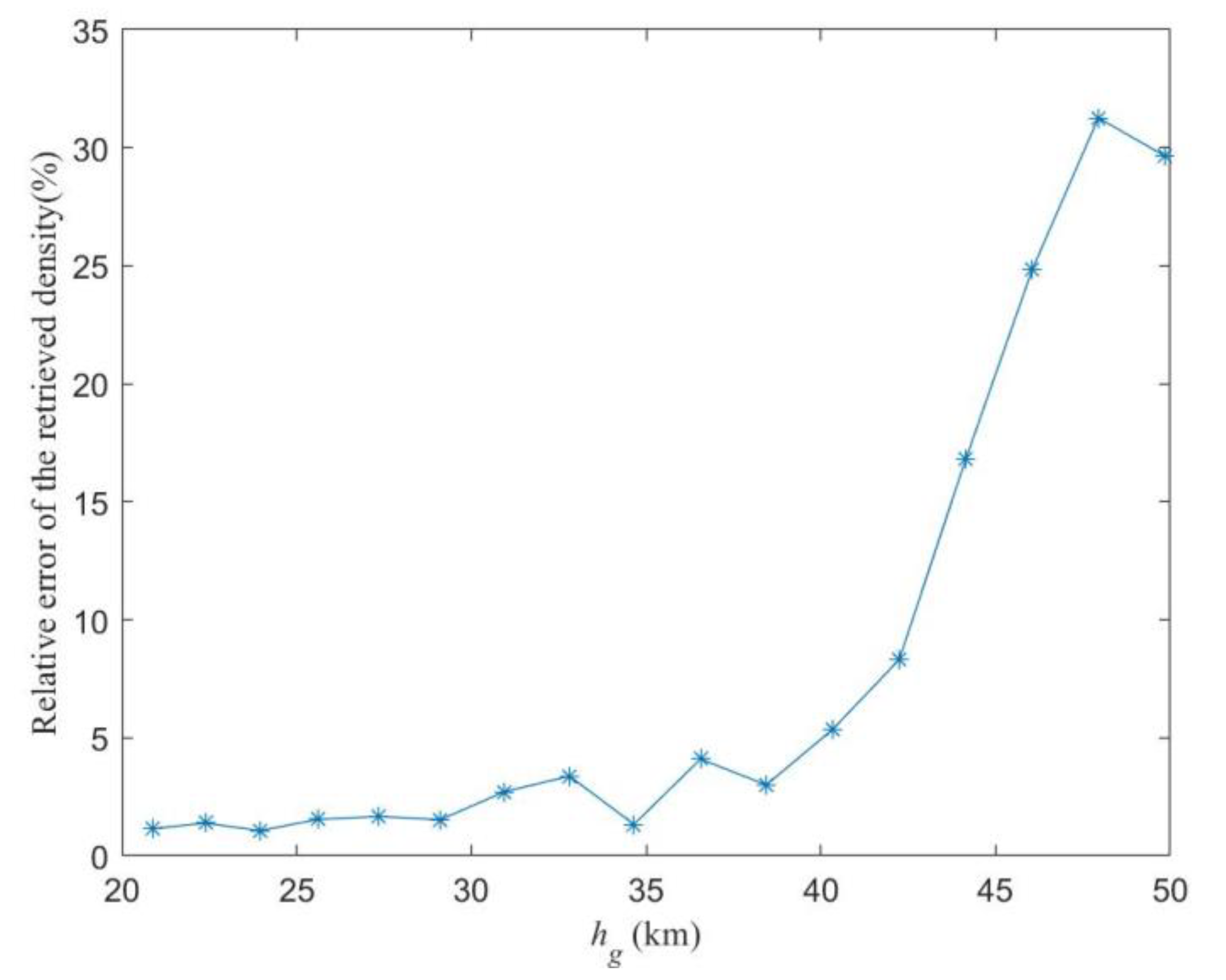
Figure 17 and
Figure 18 depict the retrieved density with the tangent height and its relative error in one simulation, respectively. In
Figure 16, the relative error of the retrieval increases as the tangent height increases. The RMS value of the error of the retrieval is 0.9% at the tangent height of 30 km, while it is about 4.5% at the tangent height of 40 km. In
Figure 17 and
Figure 18, the relative error of the retrieval also increases with the increase of the tangent height, which coincides with the result in
Figure 16.
According to the analysis in
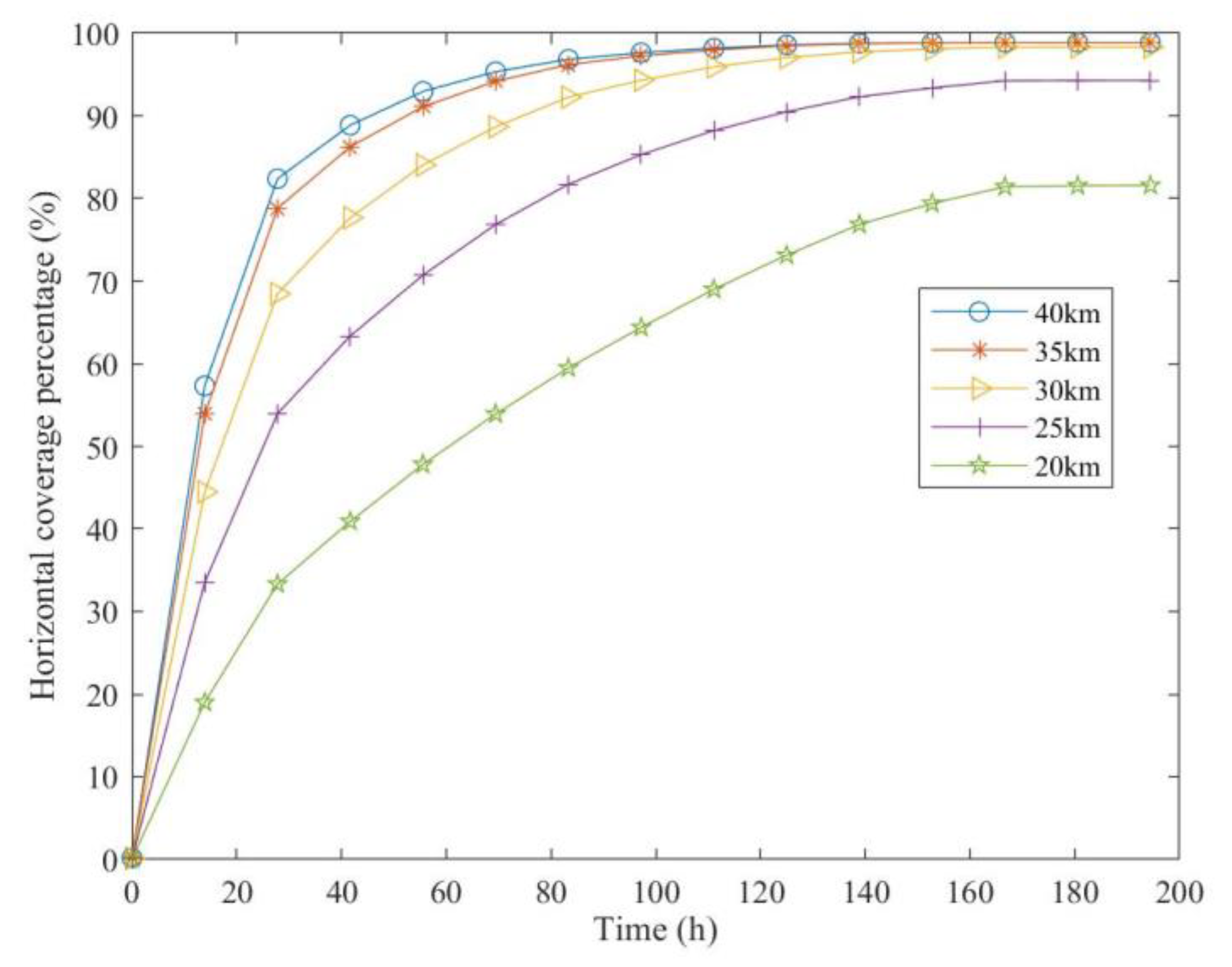
Section 3, the vertical resolution is 200 m for the retrieval herein. The horizontal coverage percentage in 100 h reaches 96% if the latitudinal and the longitudinal resolutions of the retrieved stratospheric density are 1° and 5°, respectively. In a small region, the spherically stratified atmosphere has little impact on the navigation by the stellar refraction. That is, the impact of the horizontal resolution on the navigation can be neglected if the latitudinal and the longitudinal resolutions of the retrieved stratospheric density are as high as 1° and 5°, respectively. However, the vertical resolution will impact on the navigation directly.
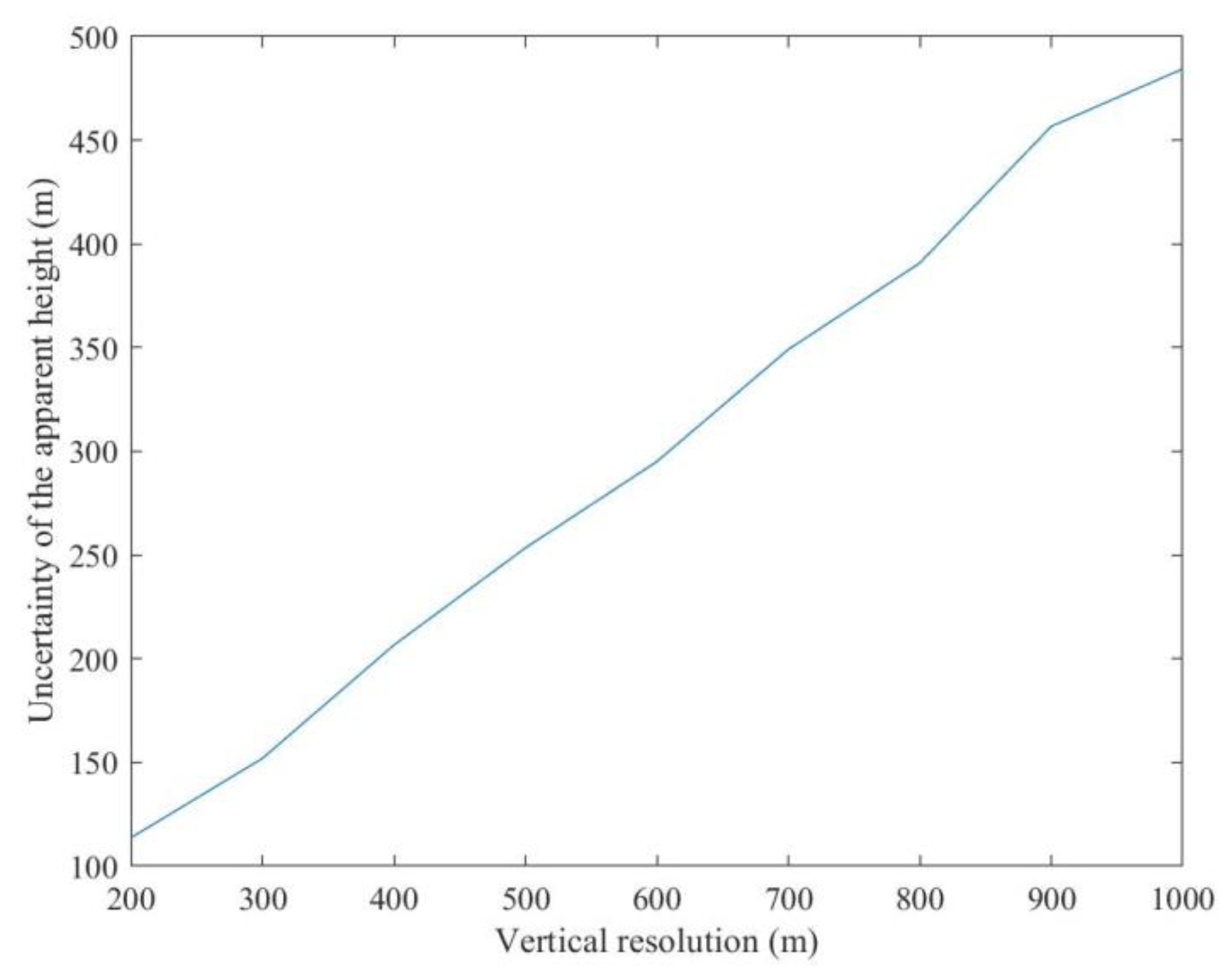
Figure 19 depicts the uncertainty on the apparent height with the vertical resolution of the atmospheric data. Herein, as mentioned above, the apparent height acquired by using the atmospheric data with the vertical resolution of 10 m was treated as the reference. That is, the uncertainty on the apparent height with a vertical resolution of the atmospheric data,
rv, is the difference between the apparent height with
rv and that with the vertical resolution of 10 m. In
Figure 19, the uncertainty on the apparent height was approximately proportional to the vertical resolution. Hence, both the accuracy of the retrieval and the vertical resolution should be taken into account in evaluating the impact of the retrieved density on the navigation comprehensively. For example, according to simulations, the RMS value of the uncertainty on the apparent height was 166 m if the relative error of the retrieval was 0.9% at the tangent height of 30 km and the vertical resolution was 200 m by the star occultation. However, the RMS value of the uncertainty on the apparent height is 735 m if the relative error of the retrieval is 0.3% under the tangent height of 30 km and the vertical resolution is 1.4 km by the GPS radio occultation. Hence, the retrieval by the star occultation is more suitable for the navigation by the stellar refraction to achieve a higher accuracy than that by the GPS radio occultation.
7. Conclusions
Aiming at the navigation by the stellar refraction with the high accuracy, this paper investigates the retrieval of the stratospheric density by the star occultation. After the retrieval was derived in principle, the spatial resolution, the atmospheric attenuation, and the accuracy of the retrieval were analyzed sequentially. The retrieval by the star occultation was proven to be more suitable for the accurate navigation of the stellar refraction than that by the GPS radio occultation by simulations. The following points can be summarized.
(1) The vertical resolution of the retrieval is mainly determined by the orbit and the output frequency of the star sensor. The lower the orbit is and the higher the output frequency of the star sensor is, the higher the vertical resolution is.
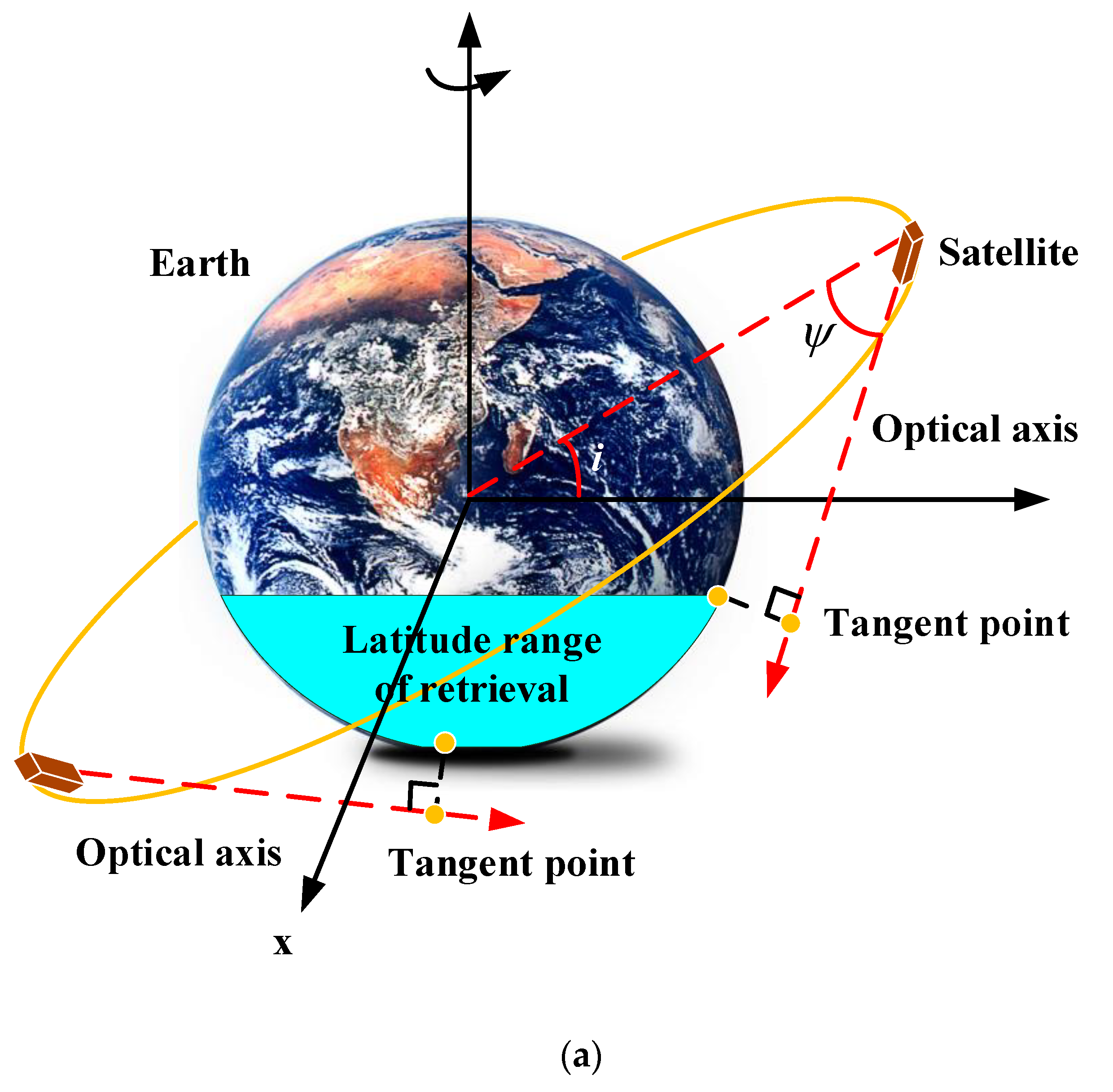
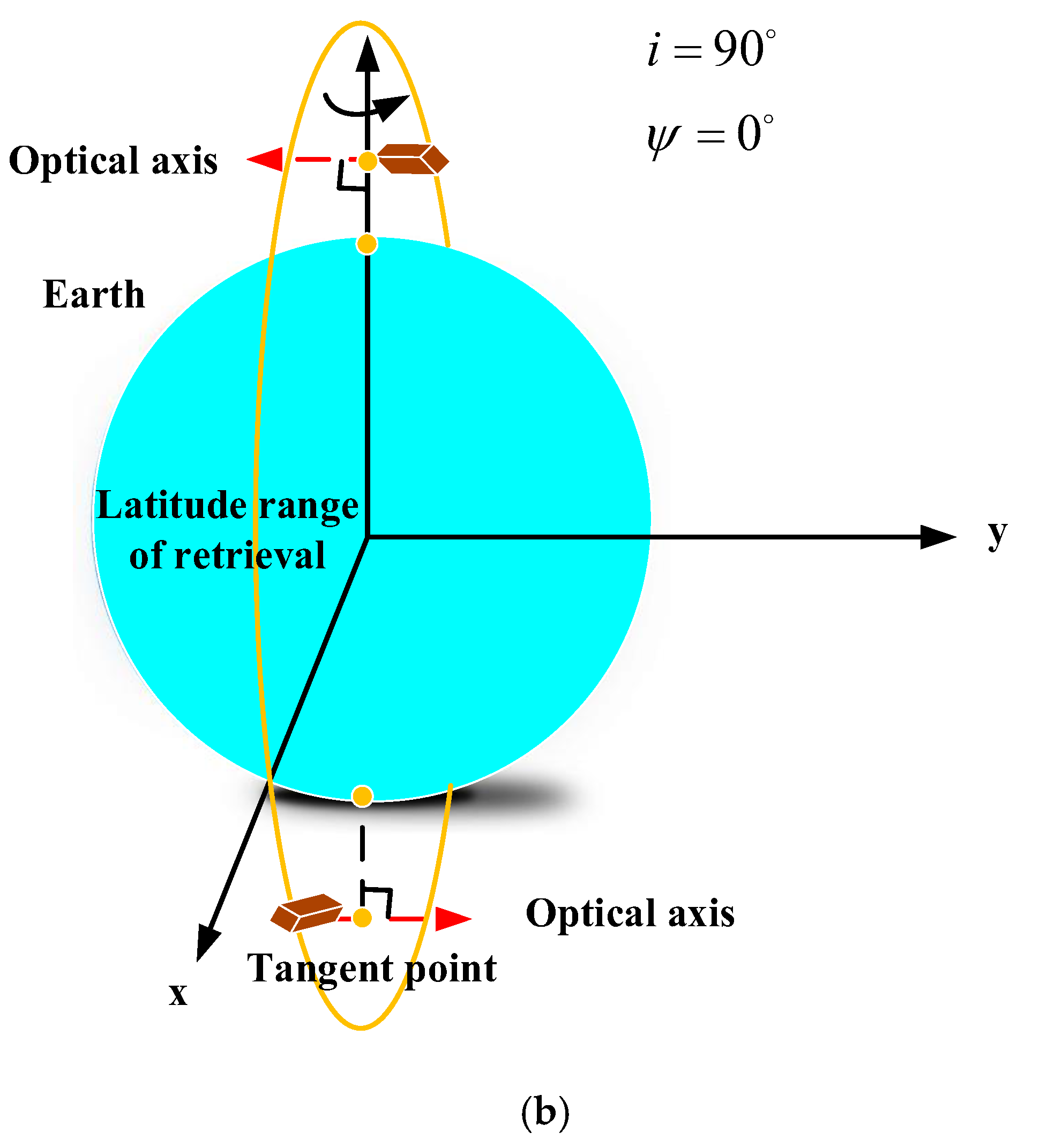
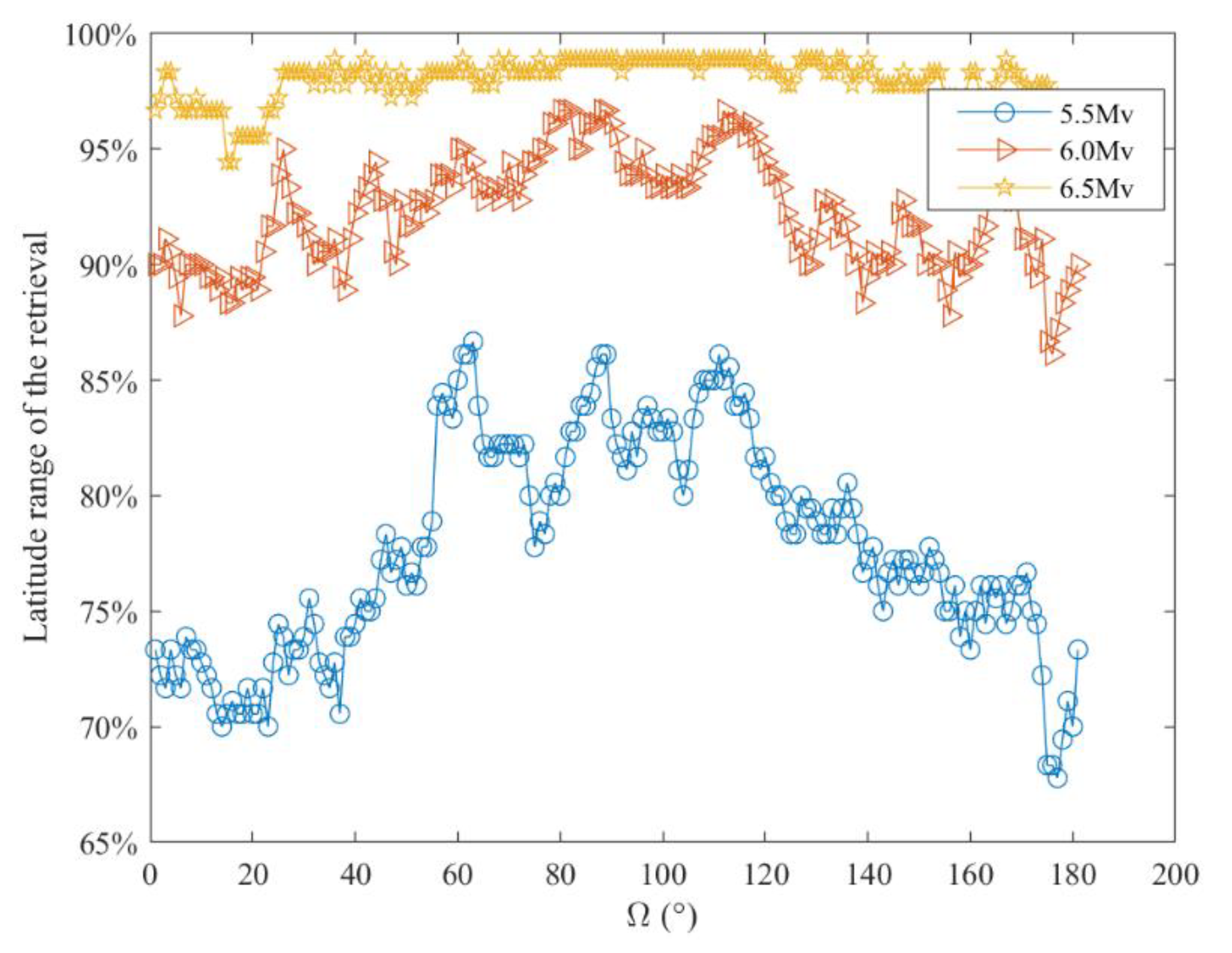
(2) The horizontal resolution of the retrieval depends on both the orbit and the star sensor. The longitude interval is determined by the altitude of the satellite. The lower the orbit is, the smaller the longitude interval is. The coverage of the retrieval in the latitude range is related to the orbital inclination, the right ascension of the ascending node, the direction of the optical axis of the star sensor, and the magnitude threshold of the star sensor. The coverage of the retrieval in the latitude range is large when the optical axis of the star sensor lies in the orbital plane, the polar orbit is employed, and the magnitude threshold of the star sensor is large.
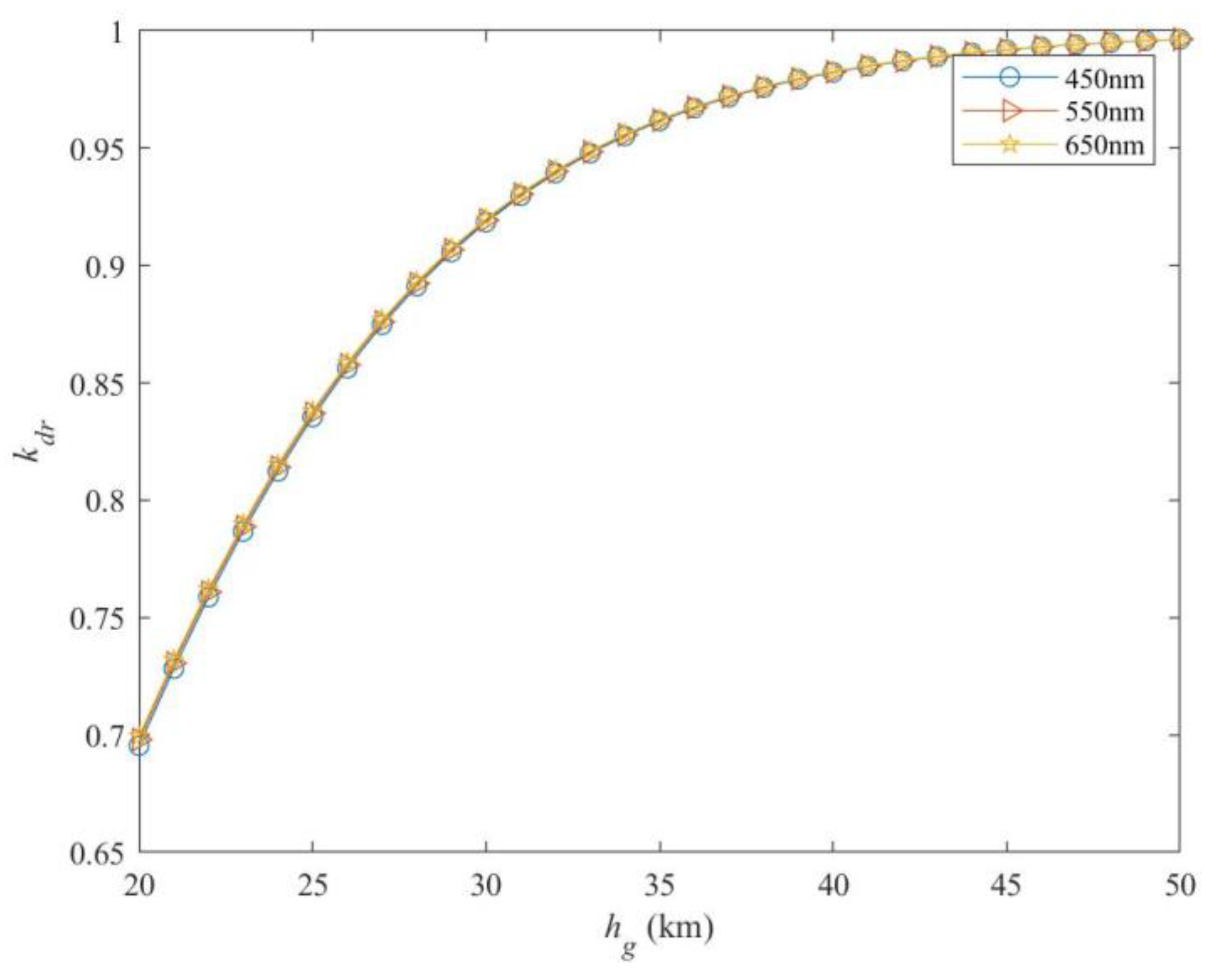
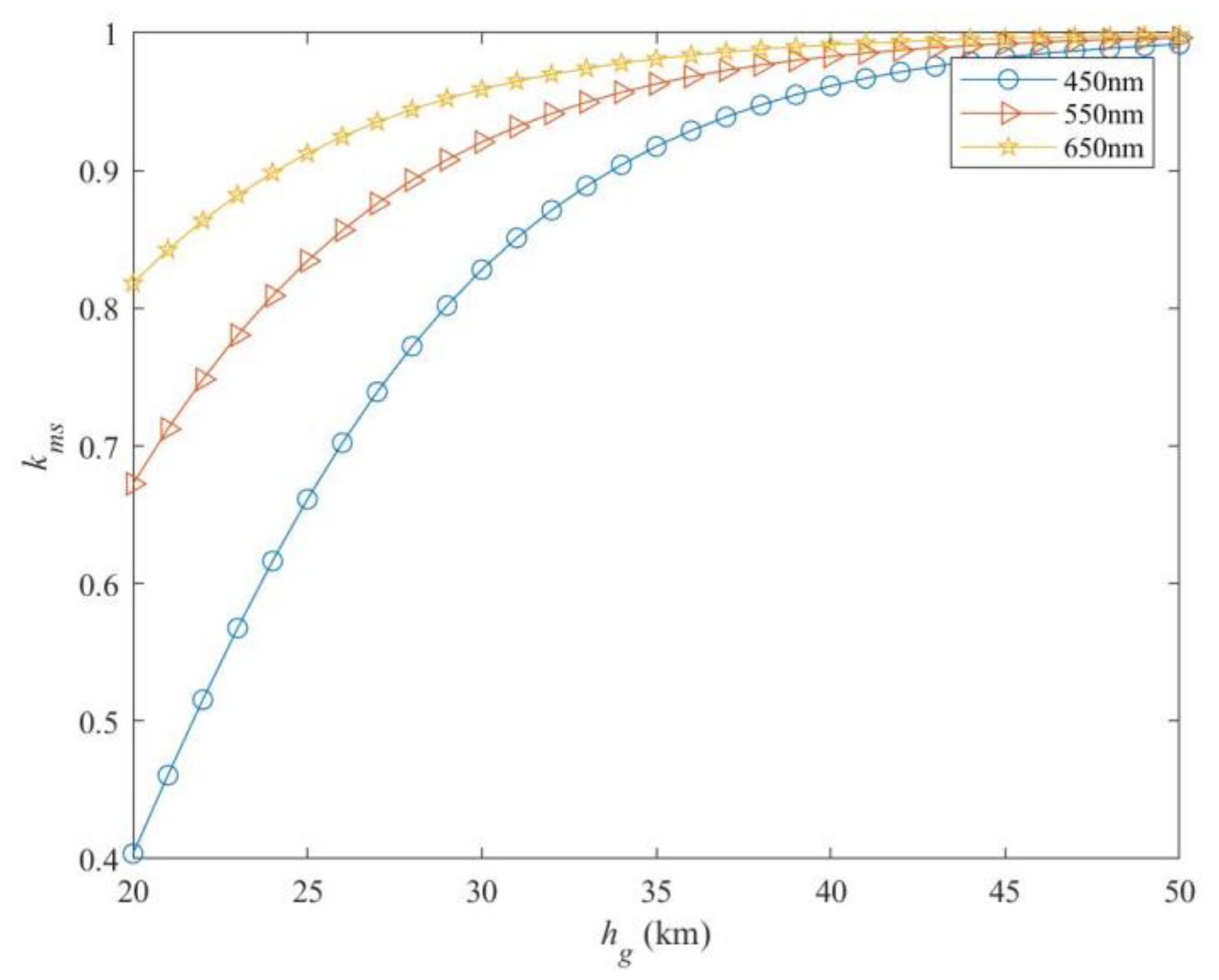
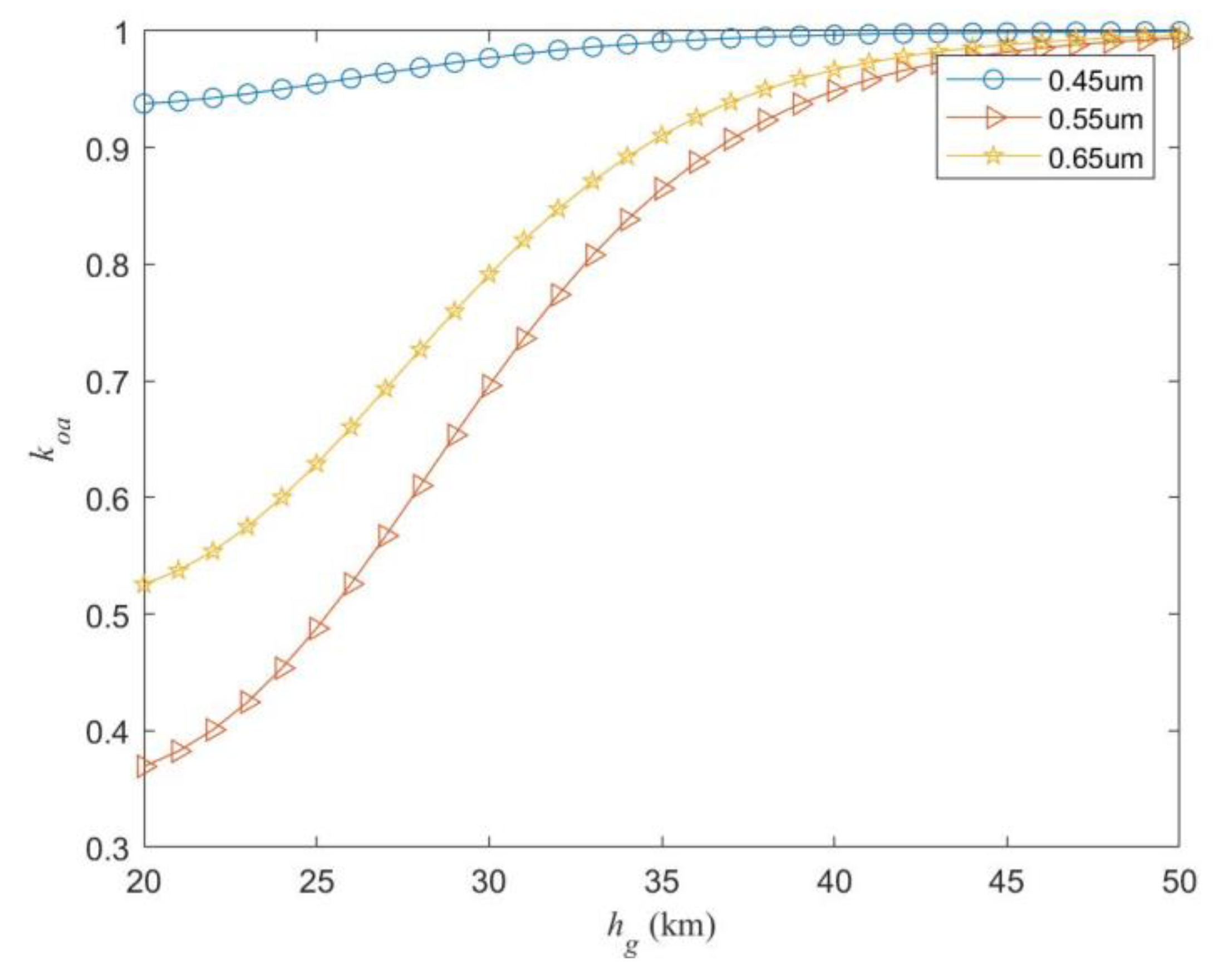
(3) The ray of the starlight in the visible spectrum is attenuated by the refractive dispersion, the molecular scattering, and the ozone absorption mainly when it passes through the stratosphere. The lower the tangent height is, the more significantly the ray of the starlight is attenuated.
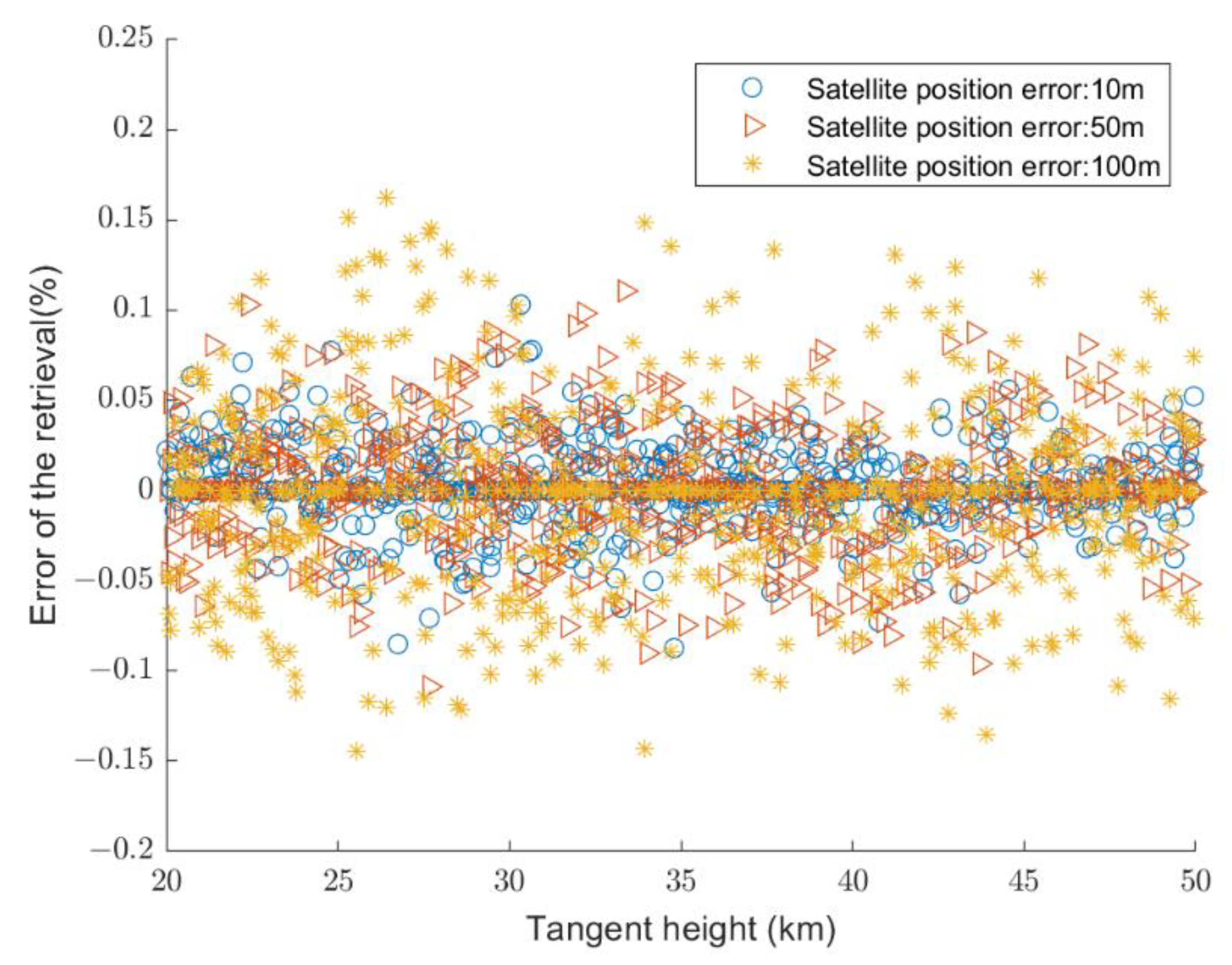
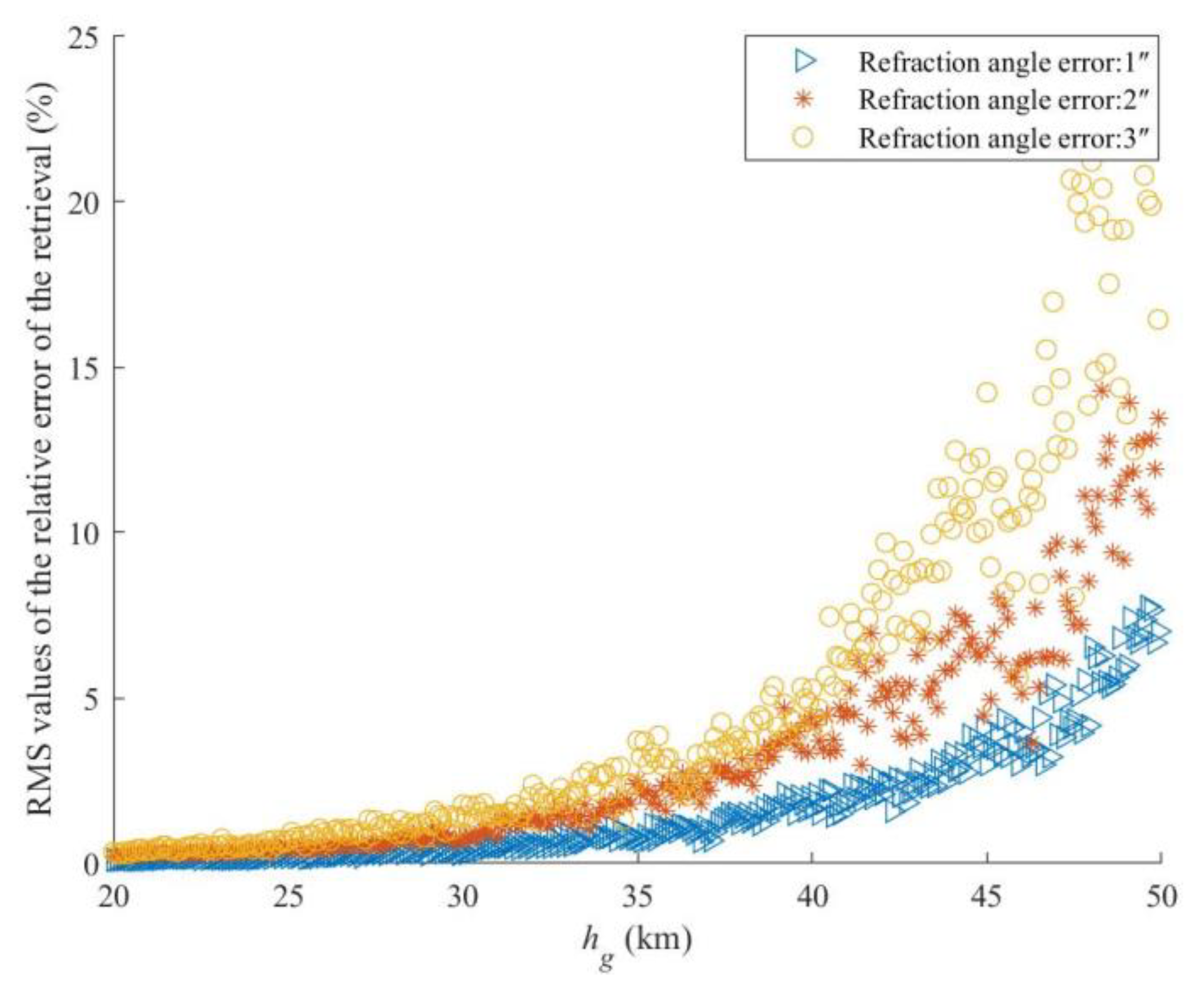
(4) The accuracy of the retrieval is mainly impacted by the assumption-derived error, the satellite position error, and the refraction angle error. The satellite position error has little impact on the retrieval error if the accurate GNSS receiver is employed. However, the refraction angle error contributes most of the retrieval error.
In the future, a constellation will be designed for the star occultation. We will also try to verify the retrieval by an on-board experiment if possible.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}