
Attitude Dynamics of Spinning Magnetic LEO/VLEO Satellites



Abstract
:1. Introduction
2. Problem Statement
- The orbit of the satellite remains circular.
- The atmosphere is not rotating.
- The density and temperature of the incident air stream are chosen using the Jacchia–Bowman 2008 Atmosphere Model [34].
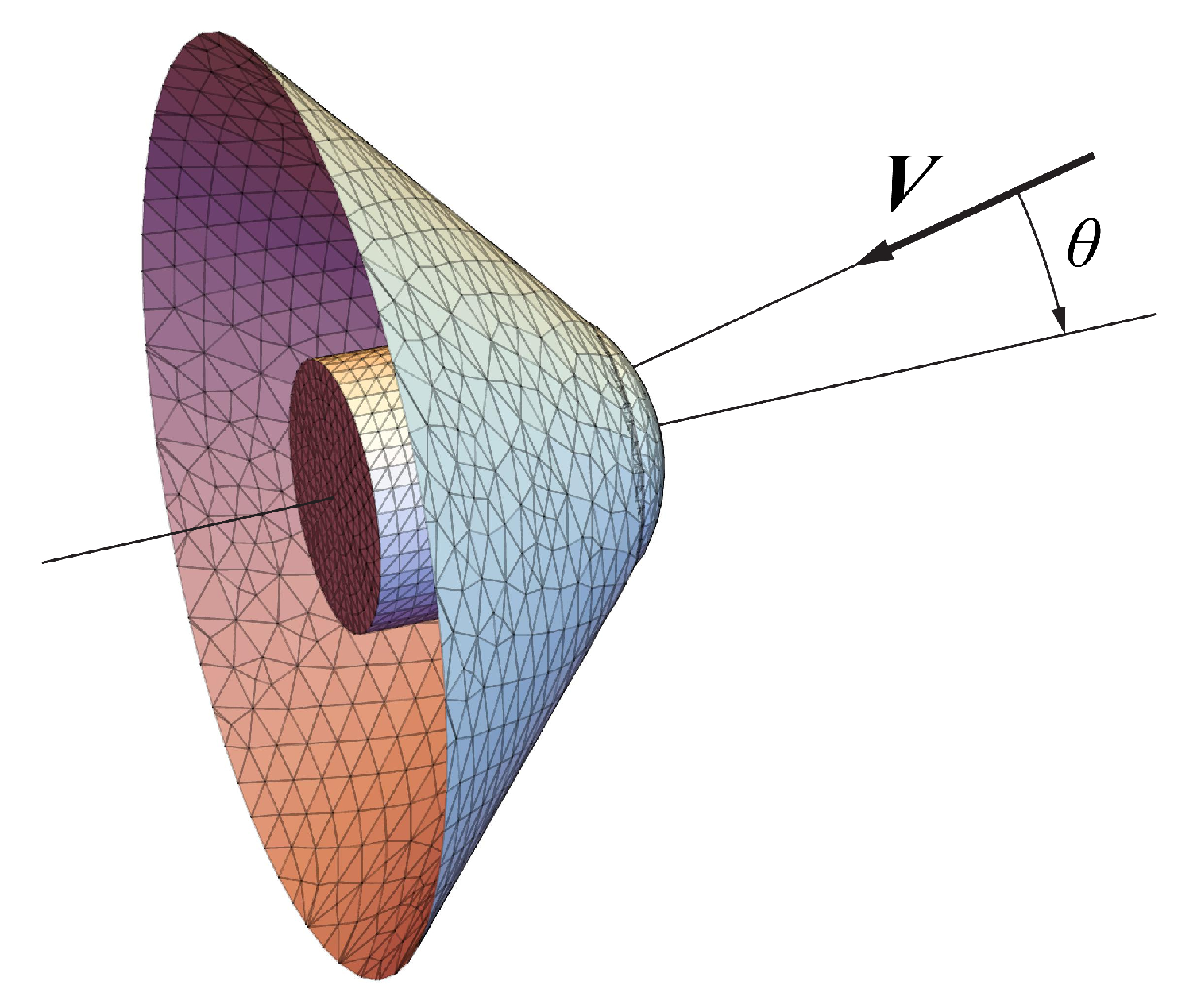
- The satellite is shaped as a body of revolution.
- The centre of mass of the satellite lies on its axis of symmetry.
- The transverse moments of inertia of the satellite are equal to each other.
2.1. Coordinate Systems
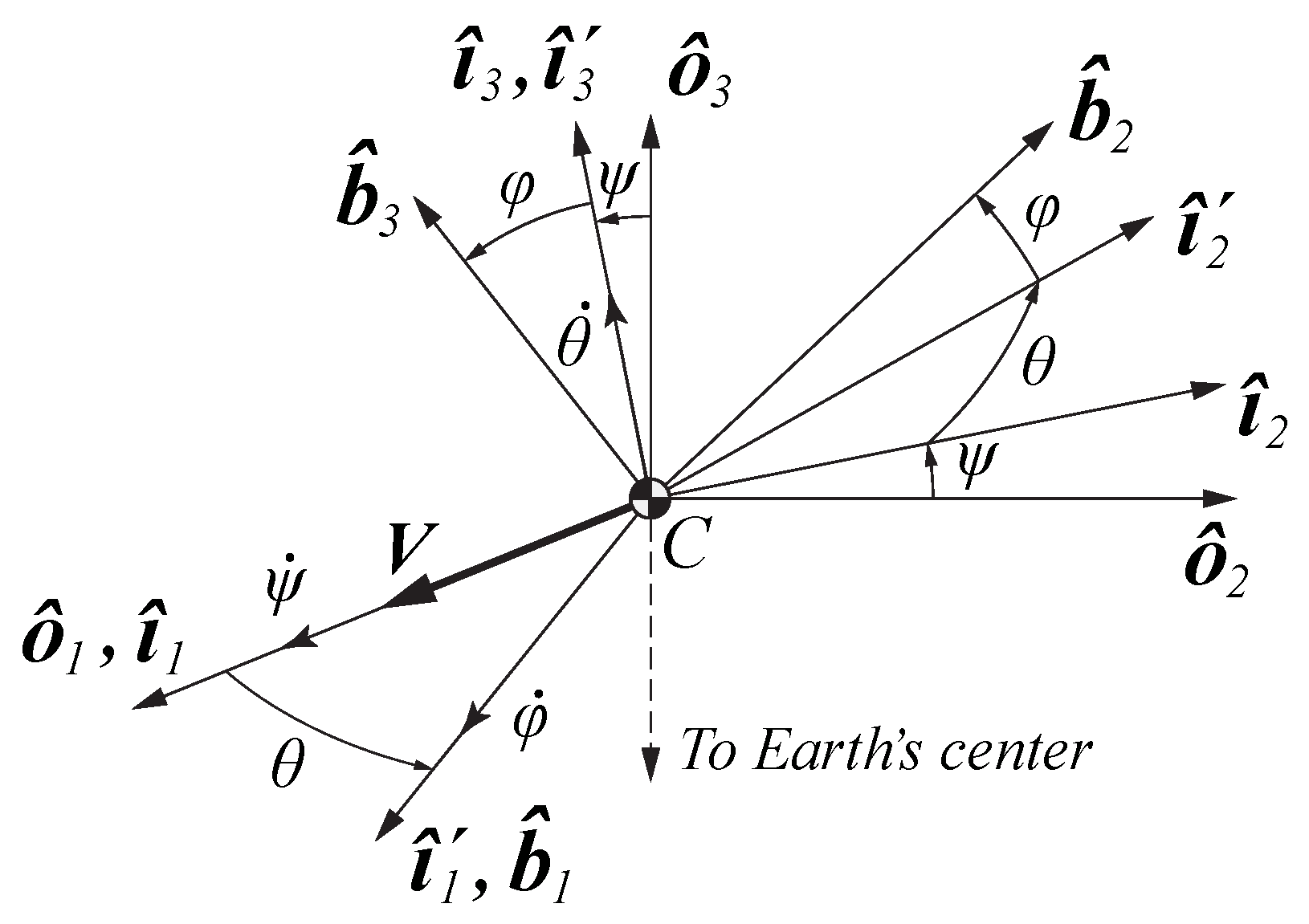
- The orbital frame O is defined through an orthonormal right-hand set of unit vectors , with an origin at the satellite’s centre of mass (Figure 1). The vector is tangential to the orbit in the flight direction, the vector is directed along the radius vector from the centre of the Earth to the centre of mass of the satellite.
- The body-fixed frame B is defined through a set . These vectors coincide with the satellite’s principal axes of inertia, and the vector lies along the axis of symmetry. The orientation of relative to is described by a symmetric set of Euler angles corresponding to three successive positive rotations: first about Axis 1 by the precession angle , then about Axis 3 by the nutation angle (angle of attack), , and finally, about Axis 1 by the spin angle , as is shown in Figure 1. The transformation matrix between O and B is defined bywhere, , etc.
- The intermediate coordinate frames I and are defined through unit vector sets , , respectively. The orientations of these frames relative to the orbital frame are determined by the above-mentioned rotations: a single rotation by the angle for the frame and two successive rotations by the angles and for the frame.
2.2. Environmental Torques
2.2.1. Gravitational Torque
2.2.2. Magnetic Torque
2.2.3. Restoring Aerodynamic Torque
2.2.4. Damping Aerodynamic Torque
3. Equations of Motion
3.1. Unperturbed Motion
3.2. Perturbed Motion
4. Case Study: Deployable Satellite
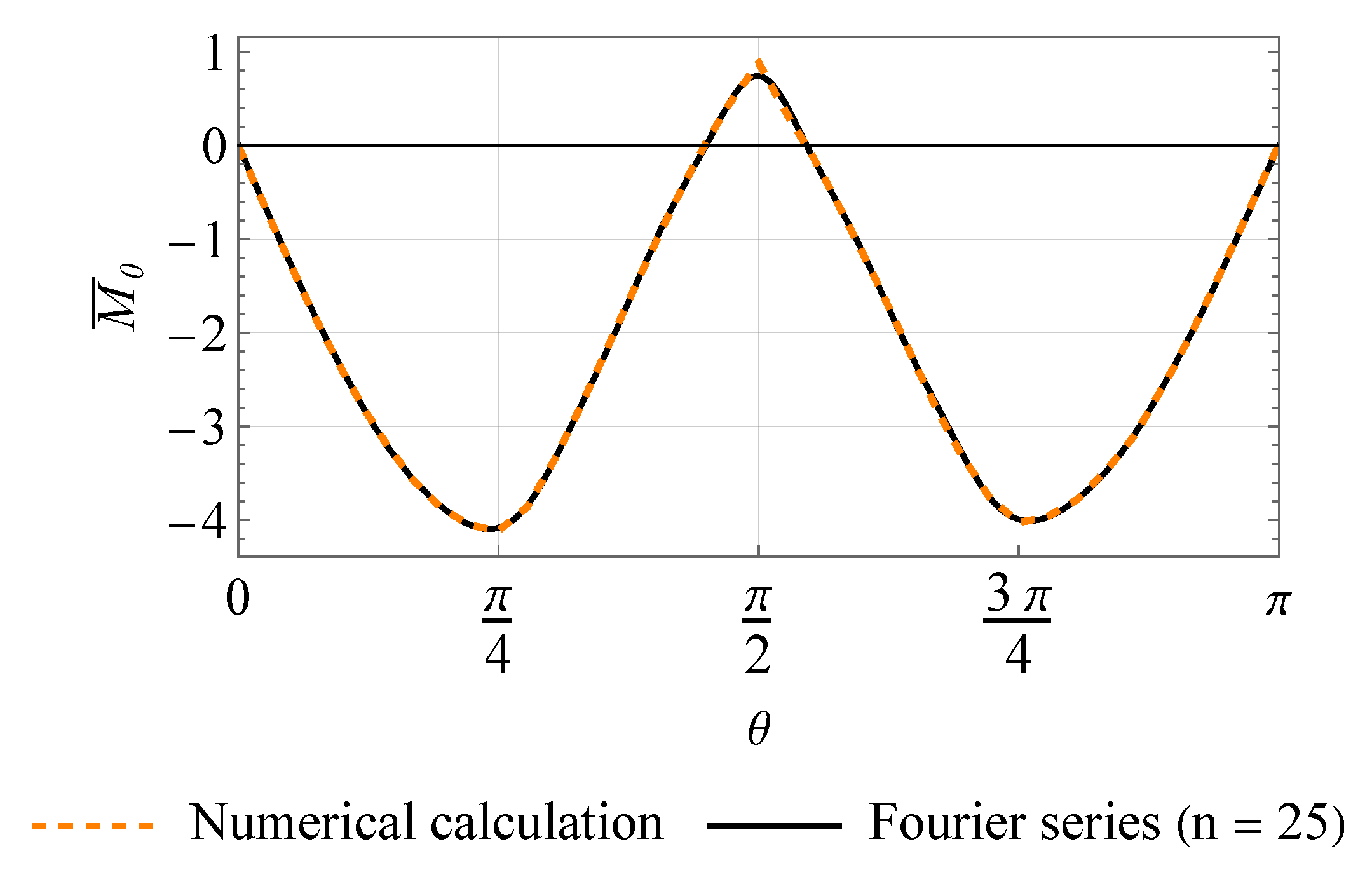
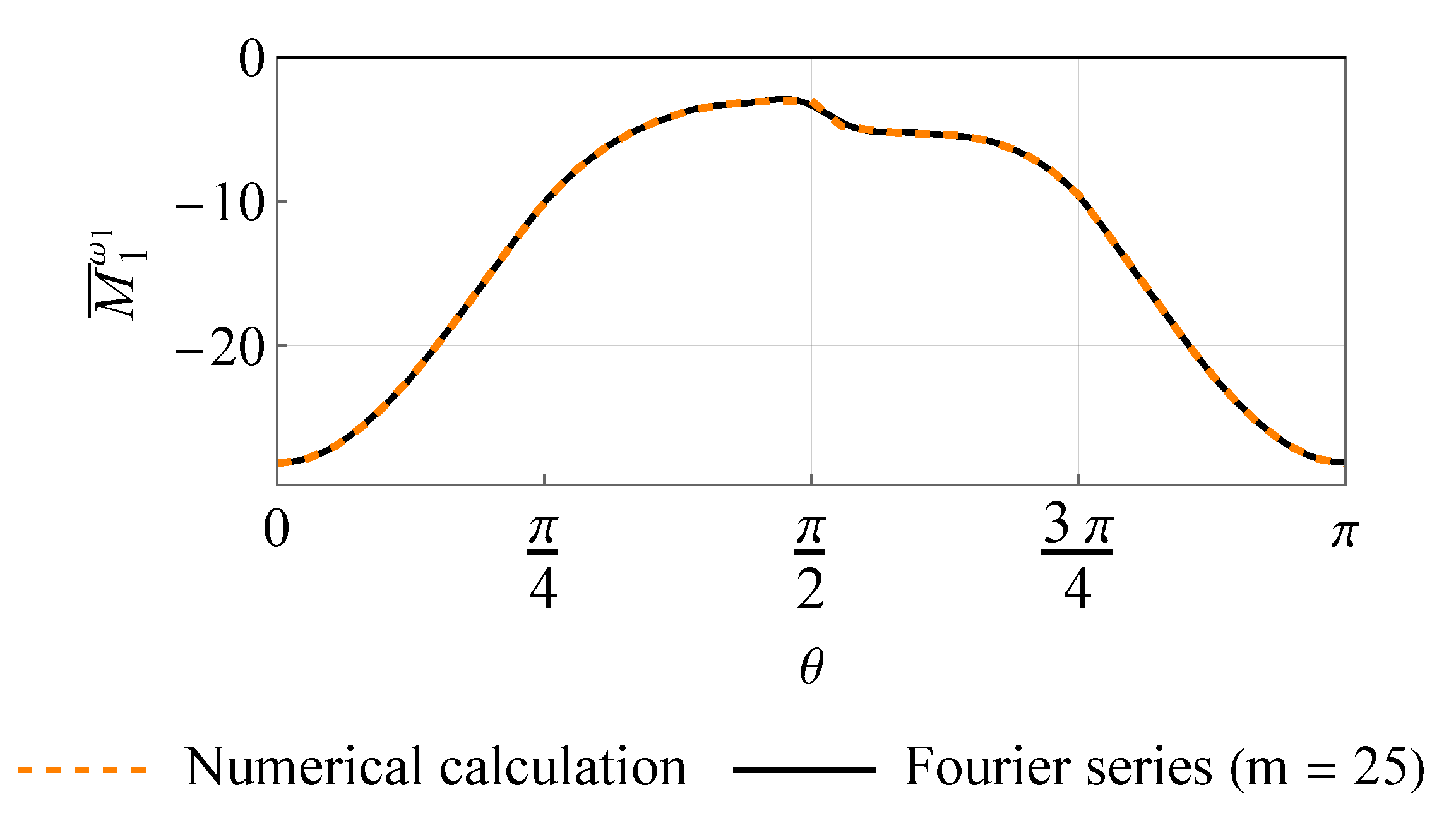
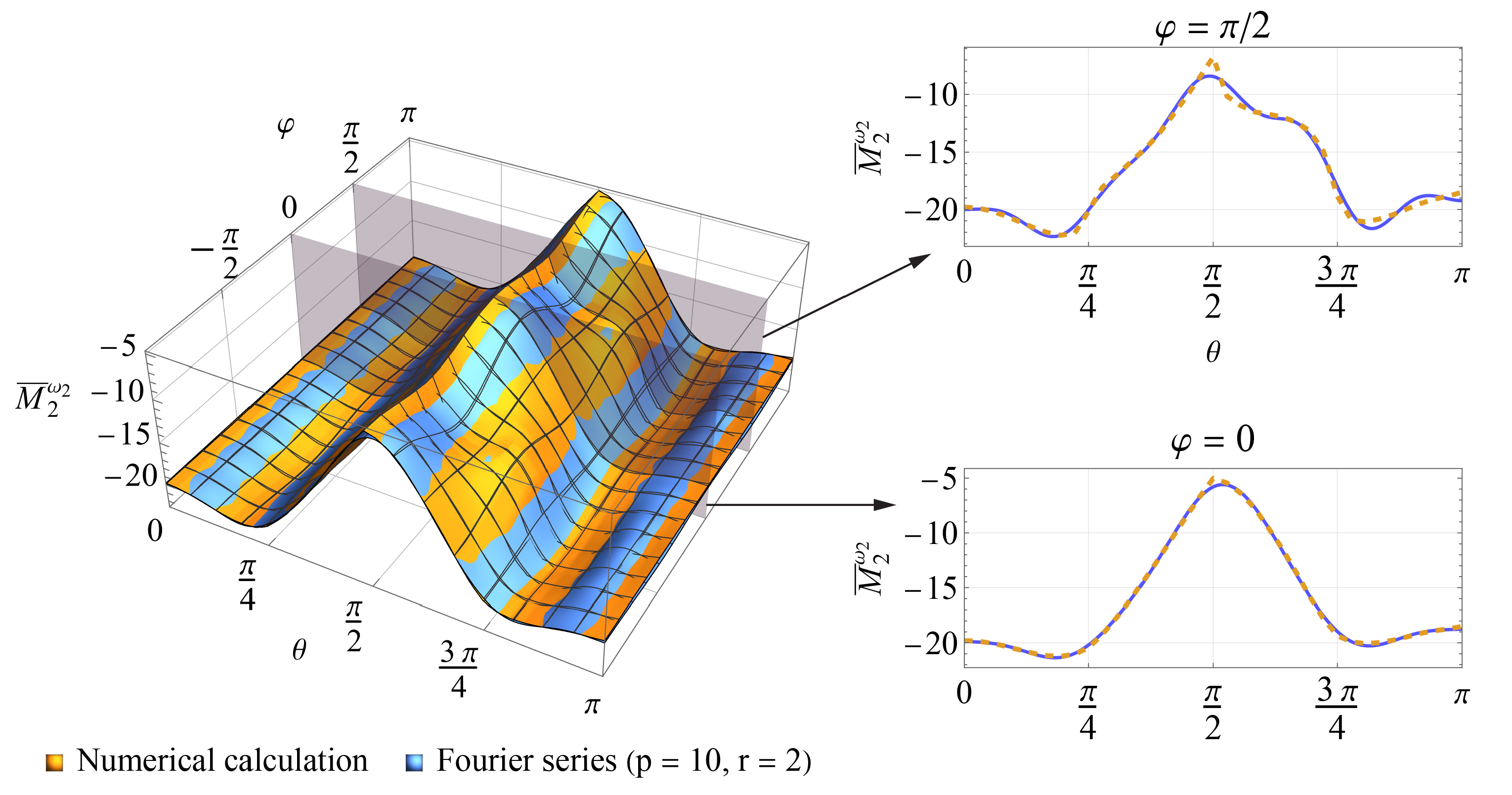
4.1. Aerodynamic Characteristics
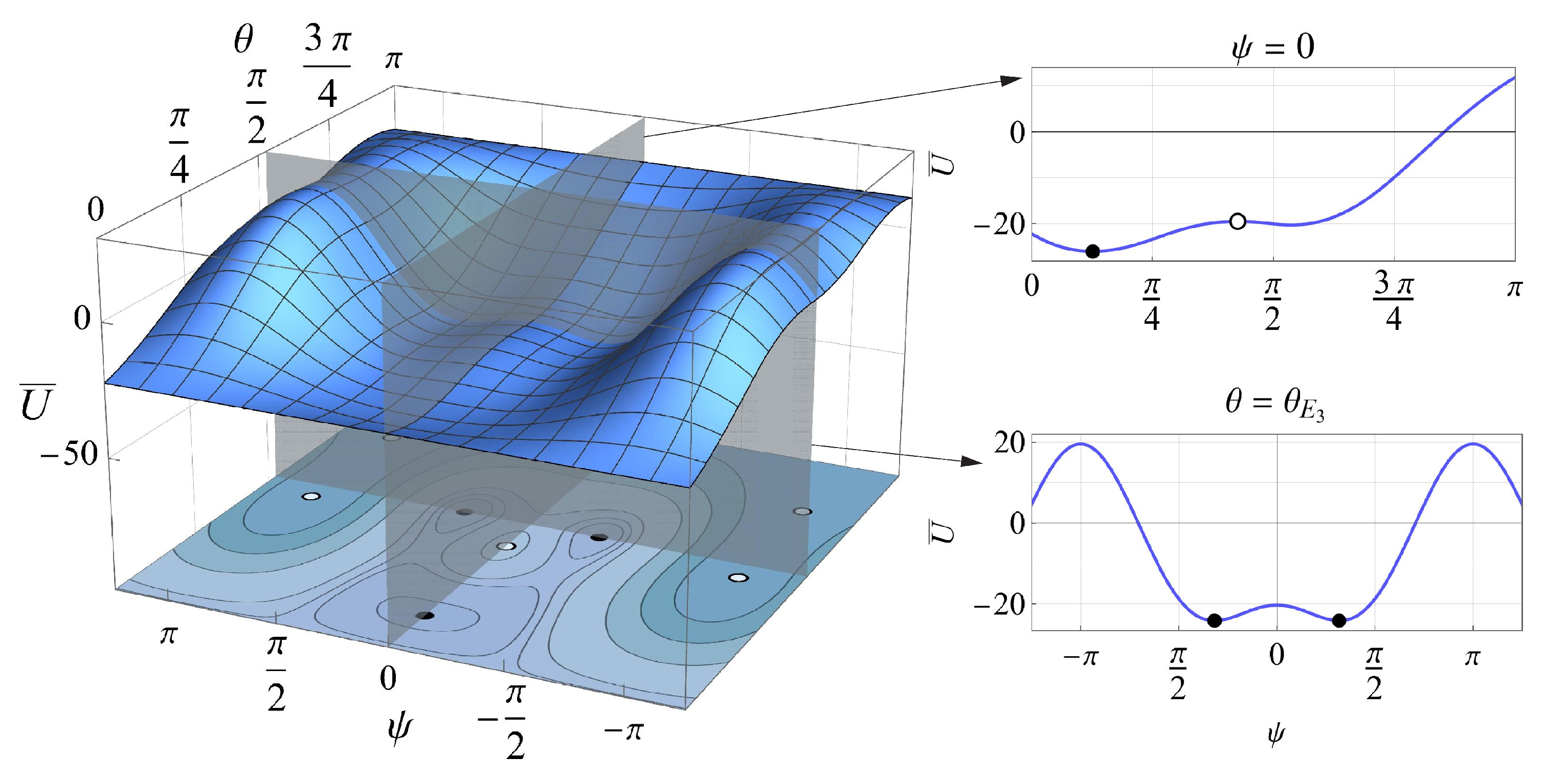
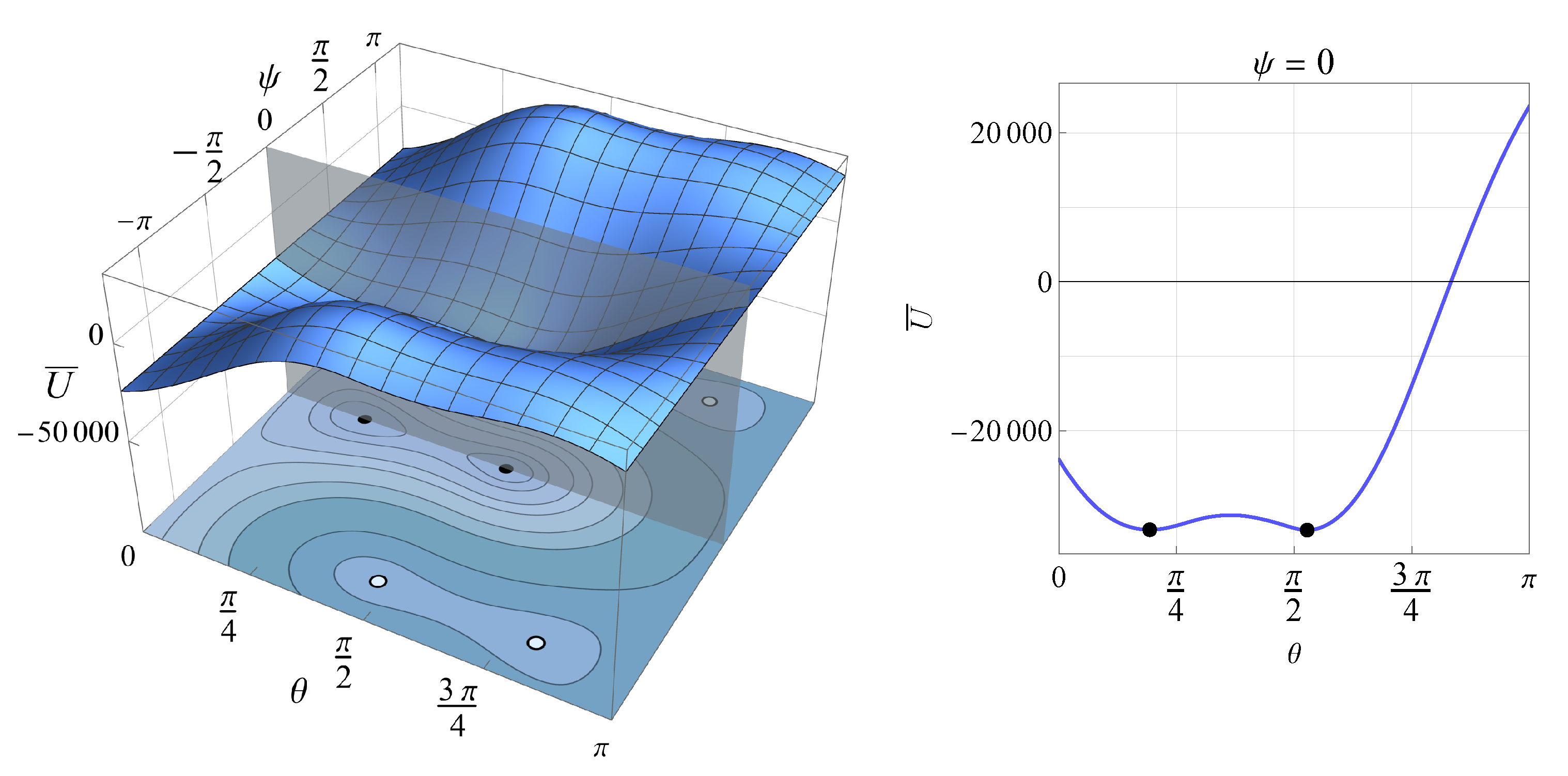
4.2. Dynamic Potential and Equilibrium Positions in Unperturbed Motion
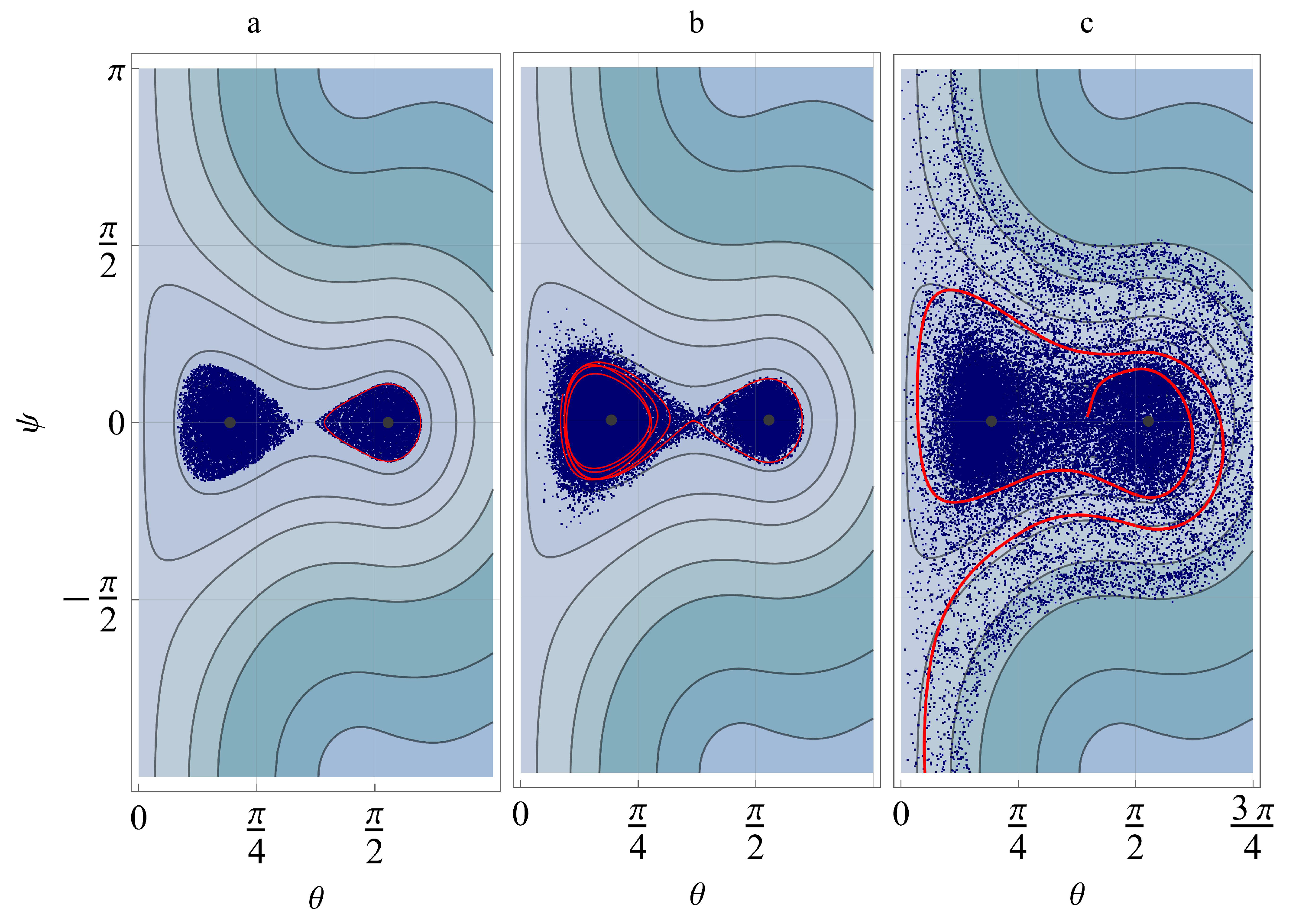
4.3. Simulations of Perturbed Motion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Generalised Forces
References
- Nurre, G.S. Effects of aerodynamic torque on an asymmetric, gravity-stabilized satellite. J. Spacecr. Rocket. 1968, 5, 1046–1050. [Google Scholar] [CrossRef]
- Beletskii, V.; Grushevskii, A. The evolution of the rotational motion of a satellite under the action of a dissipative aerodynamic moment. J. Appl. Math. Mech. 1994, 58, 11–19. [Google Scholar] [CrossRef]
- Kuznetsova, E.Y.; Sazonov, V.; Chebukov, S.Y. Evolution of the satellite rapid rotation under the action of the gravitational and aerodynamic torques. Mech. Solids 2000, 35, 1–10. [Google Scholar]
- Maslova, A.; Pirozhenko, A. Modeling of the aerodynamic moment acting upon a satellite. Cosm. Res. 2010, 48, 362–370. [Google Scholar] [CrossRef]
- DeBra, D.B. The effect of aerodynamic forces on satellite attitude. J. Astronaut. Sci 1959, 6, 40–45. [Google Scholar]
- Meirovitch, L.; Wallace, F., Jr. On the effect of aerodynamic and gravitational torques on the attitude stability of satellites. AIAA J. 1966, 4, 2196–2202. [Google Scholar] [CrossRef]
- Beletskii, V.V. Motion of an Artificial Satellite about its Center of Mass; NASA TT F-429; NASA: Washington, DC, USA, 1966.
- Frik, M.A. Attitude stability of satellites subjected to gravity gradient and aerodynamic torques. AIAA J. 1970, 8, 1780–1785. [Google Scholar] [CrossRef]
- Pande, K.; Venkatachalam, R. On optimal aerodynamic attitude control of spacecraft. Acta Astronaut. 1979, 6, 1351–1359. [Google Scholar] [CrossRef]
- Romano, F.; Espinosa-Orozco, J.; Pfeiffer, M.; Herdrich, G.; Crisp, N.; Roberts, P.; Holmes, B.; Edmondson, S.; Haigh, S.; Livadiotti, S.; et al. Intake design for an Atmosphere-Breathing Electric Propulsion System (ABEP). Acta Astronaut. 2021, 187, 225–235. [Google Scholar] [CrossRef]
- Vaidya, S.; Traub, C.; Romano, F.; Herdrich, G.; Chan, Y.A.; Fasoulas, S.; Roberts, P.; Crisp, N.; Edmondson, S.; Haigh, S.; et al. Development and analysis of novel mission scenarios based on Atmosphere-Breathing Electric Propulsion (ABEP). CEAS Space J. 2022, 14, 689–706. [Google Scholar] [CrossRef]
- Aslanov, V.; Sizov, D. 3U CubeSat aerodynamic design aimed to increase attitude stability and orbital lifetime. In Proceedings of the International Astronautical Congress, IAC, Naples, Italy, 12–14 October 2020. [Google Scholar]
- Otsu, H. Aerodynamic Characteristics of Re-Entry Capsules with Hyperbolic Contours. Aerospace 2021, 8, 287. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, J.; Tian, P.; Liang, T.; Li, Z.; Wen, D. Aerodynamic drag analysis and reduction strategy for satellites in Very Low Earth Orbit. Aerosp. Sci. Technol. 2022, 132, 108077. [Google Scholar] [CrossRef]
- Ivanov, D.; Monakhova, U.; Guerman, A.; Ovchinnikov, M. Decentralized Control of Nanosatellite Tetrahedral Formation Flying Using Aerodynamic Forces. Aerospace 2021, 8, 199. [Google Scholar] [CrossRef]
- Traub, C.; Fasoulas, S.; Herdrich, G.H. A planning tool for optimal three-dimensional formation flight maneuvers of satellites in VLEO using aerodynamic lift and drag via yaw angle deviations. Acta Astronaut. 2022, 198, 135–151. [Google Scholar] [CrossRef]
- Miyamoto, K.; Chujo, T.; Watanabe, K.; Matunaga, S. Attitude dynamics of satellites with variable shape mechanisms using atmospheric drag torque and gravity gradient torque. Acta Astronaut. 2023, 202, 625–636. [Google Scholar] [CrossRef]
- Yamada, K.; Nagata, Y.; Abe, T.; Suzuki, K.; Imamura, O.; Akita, D. Suborbital reentry demonstration of inflatable flare-type thin-membrane aeroshell using a sounding rocket. J. Spacecr. Rocket. 2015, 52, 275–284. [Google Scholar] [CrossRef]
- Berthet, M.; Yamada, K.; Nagata, Y.; Suzuki, K. Feasibility assessment of passive stabilisation for a nanosatellite with aeroshell deployed by orbit-attitude-aerodynamics simulation platform. Acta Astronaut. 2020, 173, 266–278. [Google Scholar] [CrossRef]
- Alpert, H.; Miller, R.; Kazemba, C.; Swanson, G.; Cheatwood, F. LOFTID Heat Flux Gauge Calibration: What is Truth? In Proceedings of the International Planetary Probe Workshop, Hamelin, Germany, 19–23 April 2021. [Google Scholar]
- Zuppardi, G.; Savino, R.; Mongelluzzo, G. Aero-thermo-dynamic analysis of a low ballistic coefficient deployable capsule in Earth re-entry. Acta Astronaut. 2016, 127, 593–602. [Google Scholar] [CrossRef] [Green Version]
- Carná, S.R.; Bevilacqua, R. High fidelity model for the atmospheric re-entry of CubeSats equipped with the drag de-orbit device. Acta Astronaut. 2019, 156, 134–156. [Google Scholar] [CrossRef]
- Balaraman, P.; Stephen Joseph Raj, V.; Sreehari, V.M. Static and Dynamic Analysis of Re-Entry Vehicle Nose Structures Made of Different Functionally Graded Materials. Aerospace 2022, 9, 812. [Google Scholar] [CrossRef]
- Iñarrea, M.; Lanchares, V. Chaotic pitch motion of an asymmetric non-rigid spacecraft with viscous drag in circular orbit. Int. J. Non-Linear Mech. 2006, 41, 86–100. [Google Scholar] [CrossRef]
- Akulenko, L.; Leshchenko, D.; Rachinskaya, A. Evolution of the satellite fast rotation due to the gravitational torque in a dragging medium. Mech. Solids 2008, 43, 173–184. [Google Scholar] [CrossRef]
- Leshchenko, D.; Ershkov, S.; Kozachenko, T. Evolution of a heavy rigid body rotation under the action of unsteady restoring and perturbation torques. Nonlinear Dyn. 2021, 103, 1517–1528. [Google Scholar] [CrossRef]
- Yue, B.Z. Study on the chaotic dynamics in attitude maneuver of liquid-filled flexible spacecraft. AIAA J. 2011, 49, 2090–2099. [Google Scholar] [CrossRef]
- Chegini, M.; Sadati, H.; Salarieh, H. Chaos analysis in attitude dynamics of a flexible satellite. Nonlinear Dyn. 2018, 93, 1421–1438. [Google Scholar] [CrossRef]
- Aslanov, V.S. Chaotic attitude dynamics of a LEO satellite with flexible panels. Acta Astronaut. 2021, 180, 538–544. [Google Scholar] [CrossRef]
- Aslanov, V.S.; Sizov, D.A. Chaos in flexible CubeSat attitude motion due to aerodynamic instability. Acta Astronaut. 2021, 189, 310–320. [Google Scholar] [CrossRef]
- Iñarrea, M. Chaos and its control in the pitch motion of an asymmetric magnetic spacecraft in polar elliptic orbit. Chaos Solitons Fractals 2009, 40, 1637–1652. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, L. Chaos in Spatial Attitude Motion of Spacecraft. In Chaos in Attitude Dynamics of Spacecraft; Springer: Berlin/Heidelberg, Germany, 2013; pp. 99–129. [Google Scholar]
- Aslanov, V.S.; Sizov, D.A. Chaotic pitch motion of an aerodynamically stabilized magnetic satellite in polar orbits. Chaos Solitons Fractals 2022, 164, 112718. [Google Scholar] [CrossRef]
- ISO 14222:2013; International Standard. Space Environment (Natural and Artificial)—Earth Upper Atmosphere. International Organization for Standardization: Geneva, Switzerland, 2013.
- Schaub, H.; Junkins, J.L. Analytical Mechanics of Space Systems; AIAA: Reston, VA, USA, 2009. [Google Scholar]
- Aslanov, V.S. Rigid Body Dynamics for Space Applications; Butterworth-Heinemann: Oxford, UK, 2017. [Google Scholar]
- Shrivastava, S.; Modi, V. Satellite attitude dynamics and control in the presence of environmental torques-A brief survey. J. Guid. Control. Dyn. 1983, 6, 461–471. [Google Scholar] [CrossRef]
- Gallais, P. Atmospheric Re-Entry Vehicle Mechanics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Chernousko, F.L.; Akulenko, L.D.; Leshchenko, D.D. Evolution of Motions of a Rigid Body about Its Center of Mass; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Leshchenko, D.; Ershkov, S.; Kozachenko, T. Rotations of a Rigid Body Close to the Lagrange Case under the Action of Nonstationary Perturbation Torque. J. Appl. Comput. Mech. 2022, 8, 1023–1031. [Google Scholar]
- Schaaf, S.; Chambre, P. Flow of Rarefied Gases, High Speed Aerodynamics and Jet Propulsion. In Fundamentals of Gas Dynamics; Princeton University Press: Princeton, NJ, USA, 1958; Volume 3. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Body length = Reference length | 0.3 m |
| Body radius r | 0.15 m |
| Nose radius | 0.2 m |
| Reference area | 0.0707 |
| Aerobrake half-cone angle | 45° |
| Aerobrake diameter | 1.1 m |
| Longitudinal moment of inertia A | 0.005 kg |
| Transverse moment of inertia C | 0.05 kg |
| Longitudinal shift of the centre of mass from the body’s geometric centre | m |
| h (km) | Order of Magnitude (N·m) | ||||
|---|---|---|---|---|---|
| Gravitational | Aerodynamic Restoring | Aerodynamic Damping | Magnetic | ||
| 250 | : | : | |||
| 700 | : | : | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aslanov, V.S.; Sizov, D.A. Attitude Dynamics of Spinning Magnetic LEO/VLEO Satellites. Aerospace 2023, 10, 192. https://doi.org/10.3390/aerospace10020192
Aslanov VS, Sizov DA. Attitude Dynamics of Spinning Magnetic LEO/VLEO Satellites. Aerospace. 2023; 10(2):192. https://doi.org/10.3390/aerospace10020192
Chicago/Turabian StyleAslanov, Vladimir S., and Dmitry A. Sizov. 2023. "Attitude Dynamics of Spinning Magnetic LEO/VLEO Satellites" Aerospace 10, no. 2: 192. https://doi.org/10.3390/aerospace10020192
APA StyleAslanov, V. S., & Sizov, D. A. (2023). Attitude Dynamics of Spinning Magnetic LEO/VLEO Satellites. Aerospace, 10(2), 192. https://doi.org/10.3390/aerospace10020192