

A Multiple-Step, Randomly Delayed, Robust Cubature Kalman Filter for Spacecraft-Relative Navigation



Abstract
:1. Introduction
2. Preliminaries
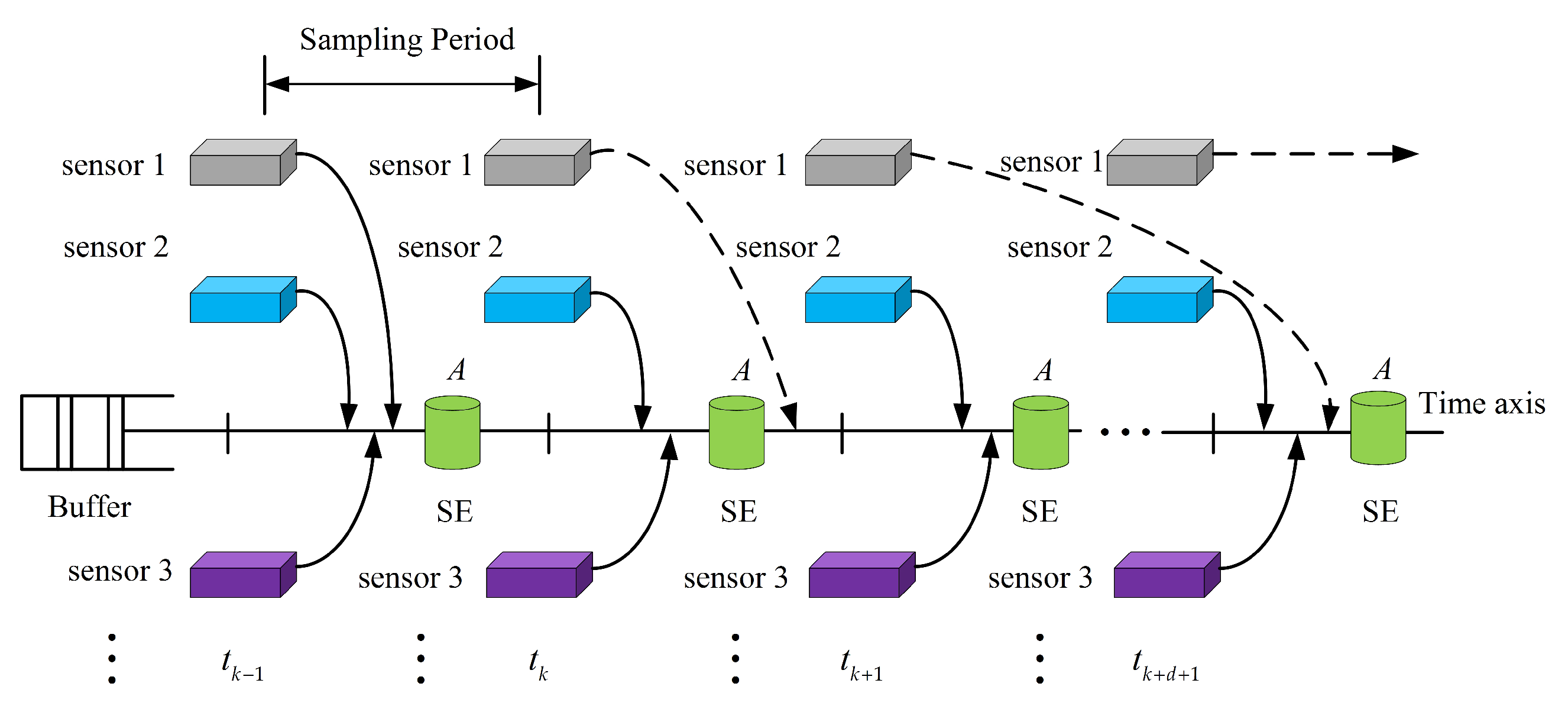
2.1. Measurements with Multiple-Step Random Delays
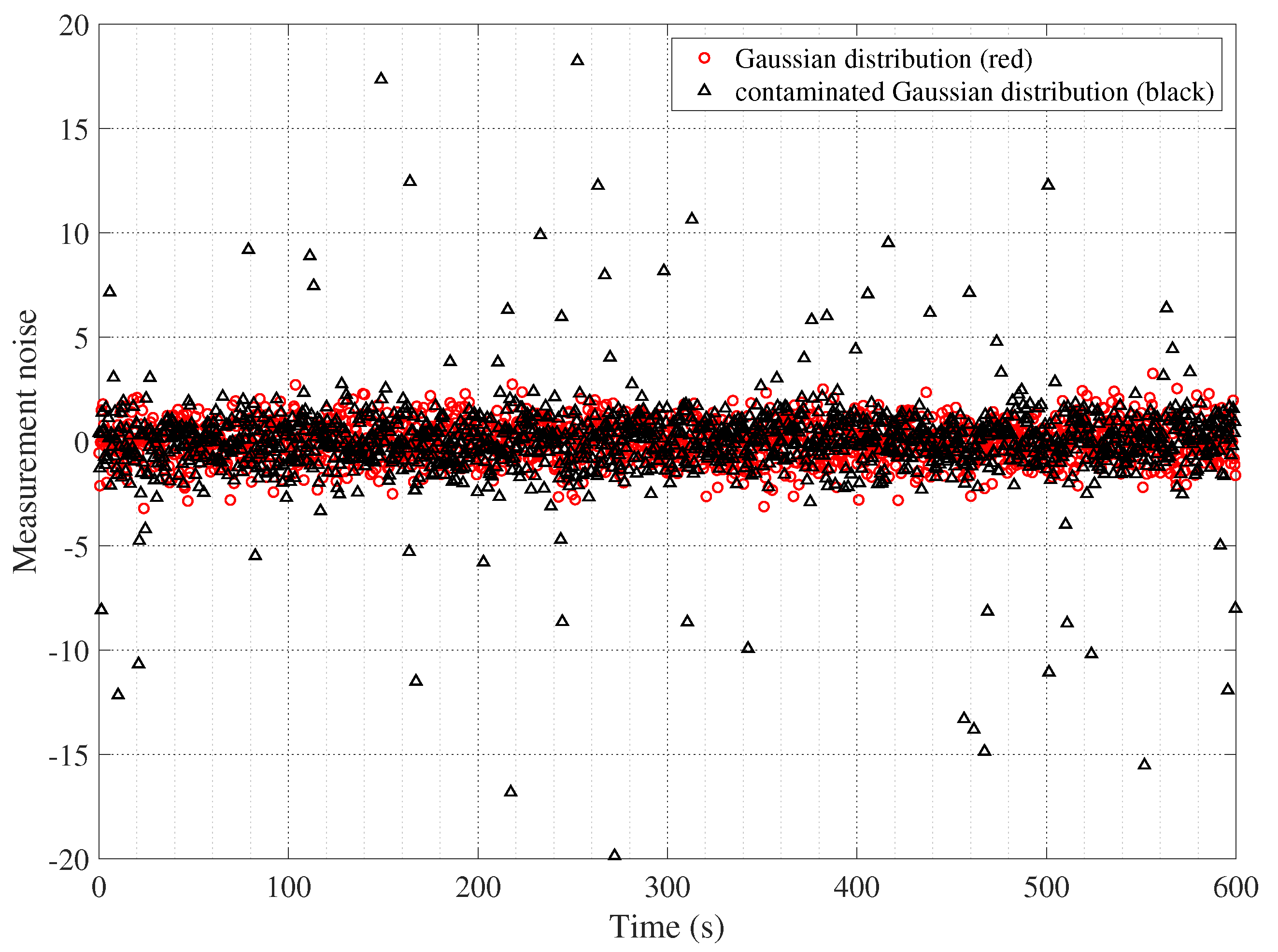
2.2. Non-Gaussian Noise in Measurements
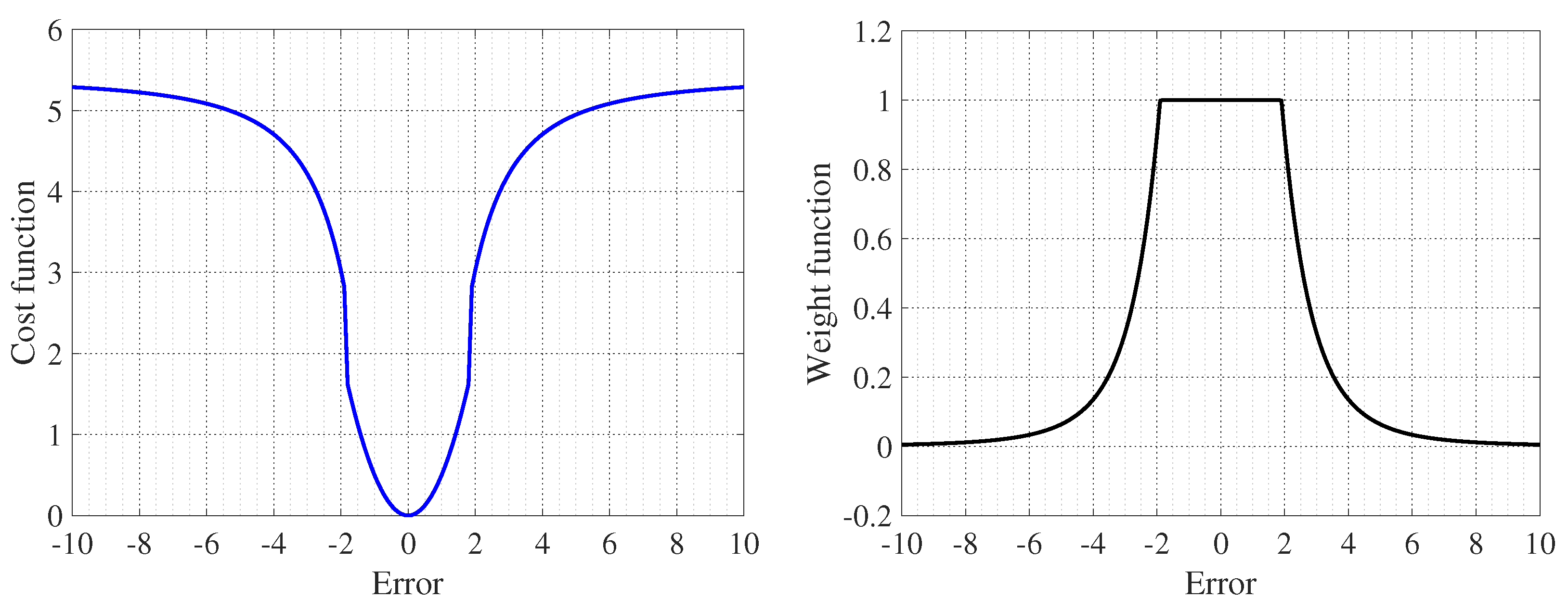
3. Brief Review of DCS Kernel
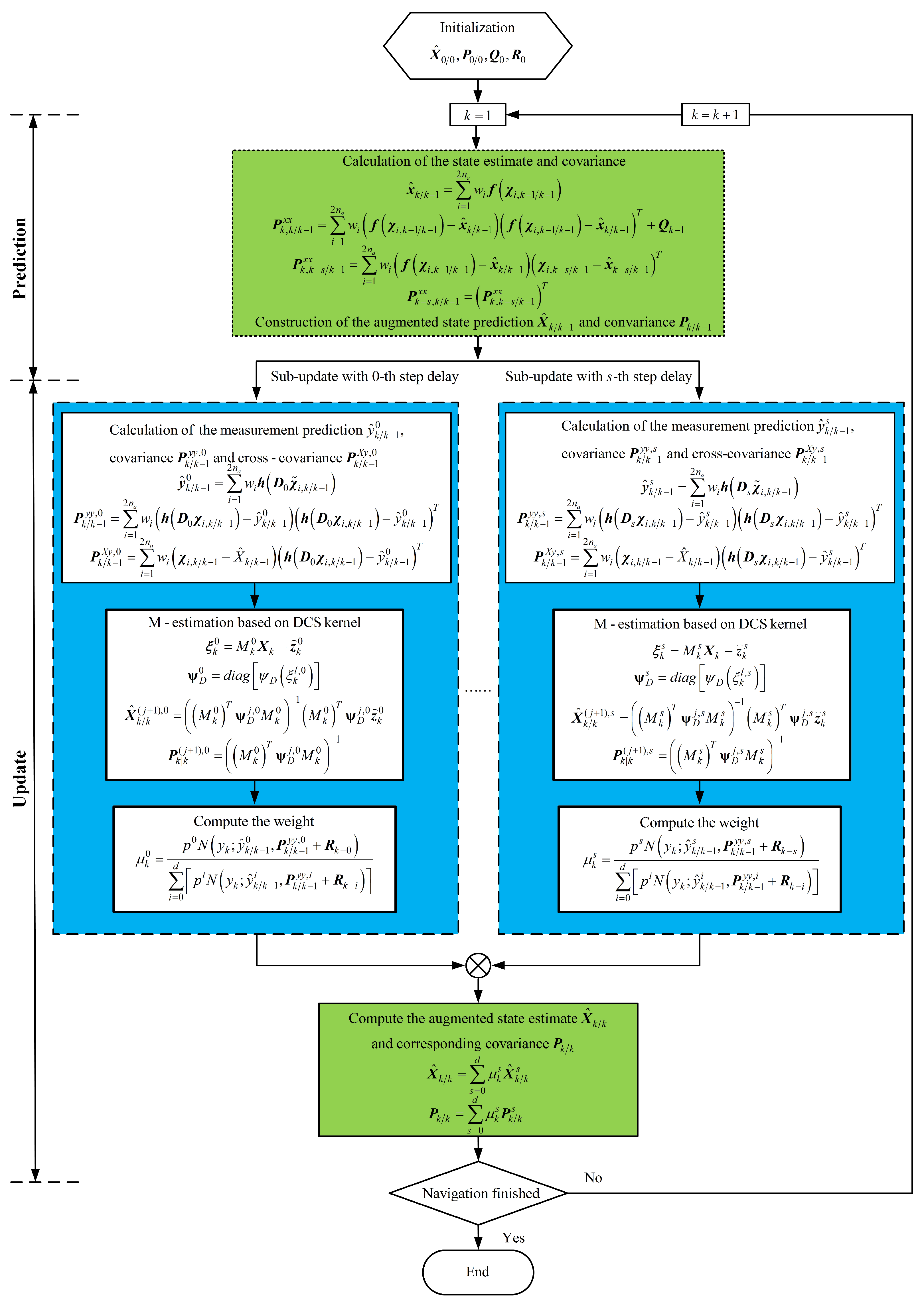
4. Multiple-Step, Randomly Delayed, Robust Cubature Kalman Filter
4.1. State-Augmentation
4.2. Prediction
4.3. Update
5. Spacecraft-Relative Navigation Model
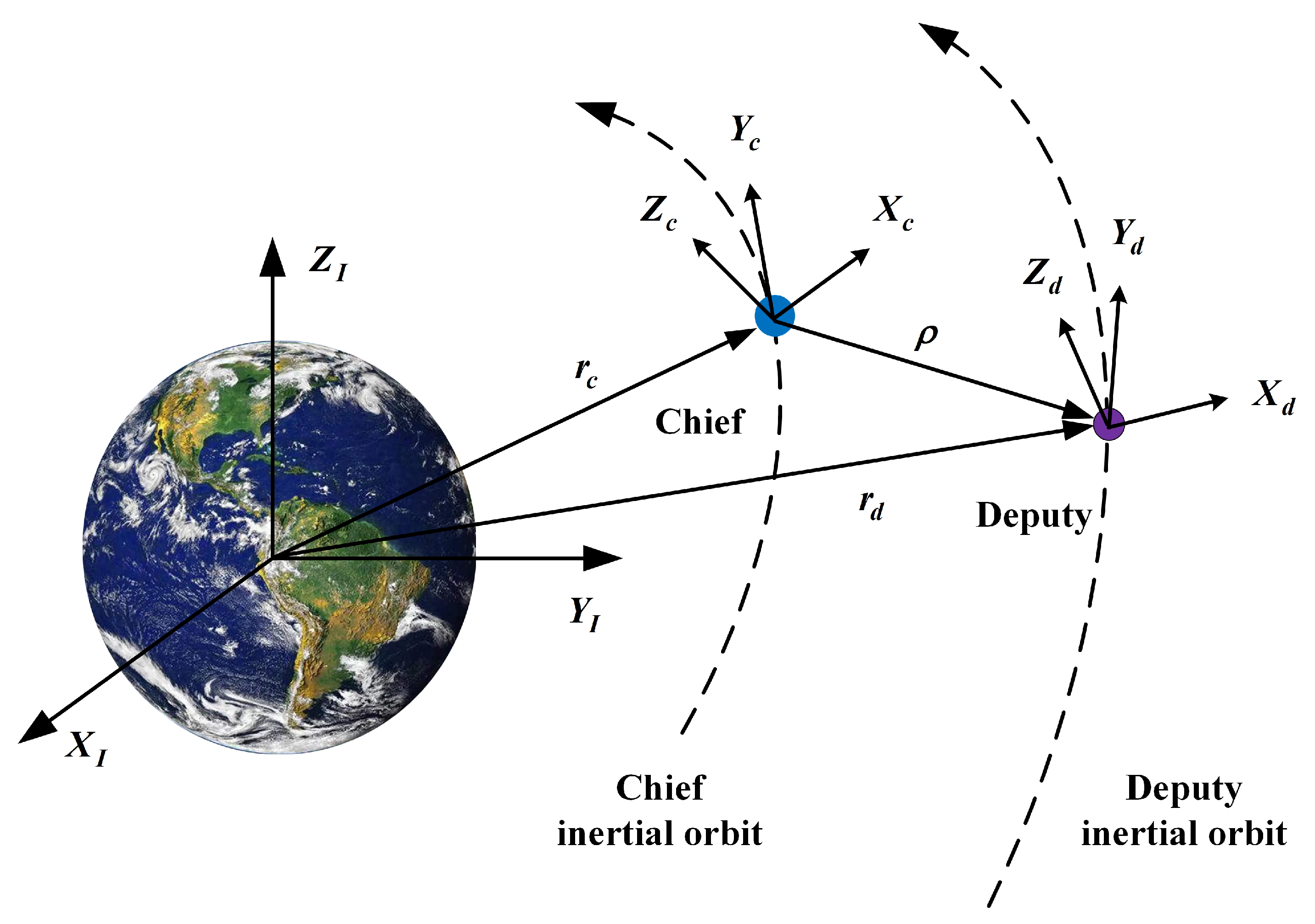
5.1. Reference Frames
- 1.
- Earth-centered inertial (ECI) frame (): The origin is located at the center of Earth, the -axis points to the vernal equinox, the -axis points to the North Pole, and the -axis forms a right-handed system with the -axis and the -axis.
- 2.
- Local–vertical–local–horizontal (LVLH) frame (): The origin is located at the mass center of the chief spacecraft, the -axis points from the center of Earth to the center of the chief spacecraft, the -axis points in the same direction as the orbital angular velocity, and the -axis forms a right-handed system with the -axis and the -axis.
- 3.
- Spacecraft body coordinate frame (): The chief body and deputy body are denoted as and , respectively. The is fixed to the spacecraft and its origin is located at the mass center of the spacecraft. The three axes of , a right-handed system, coincide with the inertial axes of spacecraft. When is coincident with , the -axis points outward radially along the orbit (yaw axis), the -axis points toward the direction of flight (roll axis), and the -axis forms a right-handed system with the -axis and the -axis (pitch axis).
5.2. Relative Dynamics
5.3. Relative Attitude Kinematics
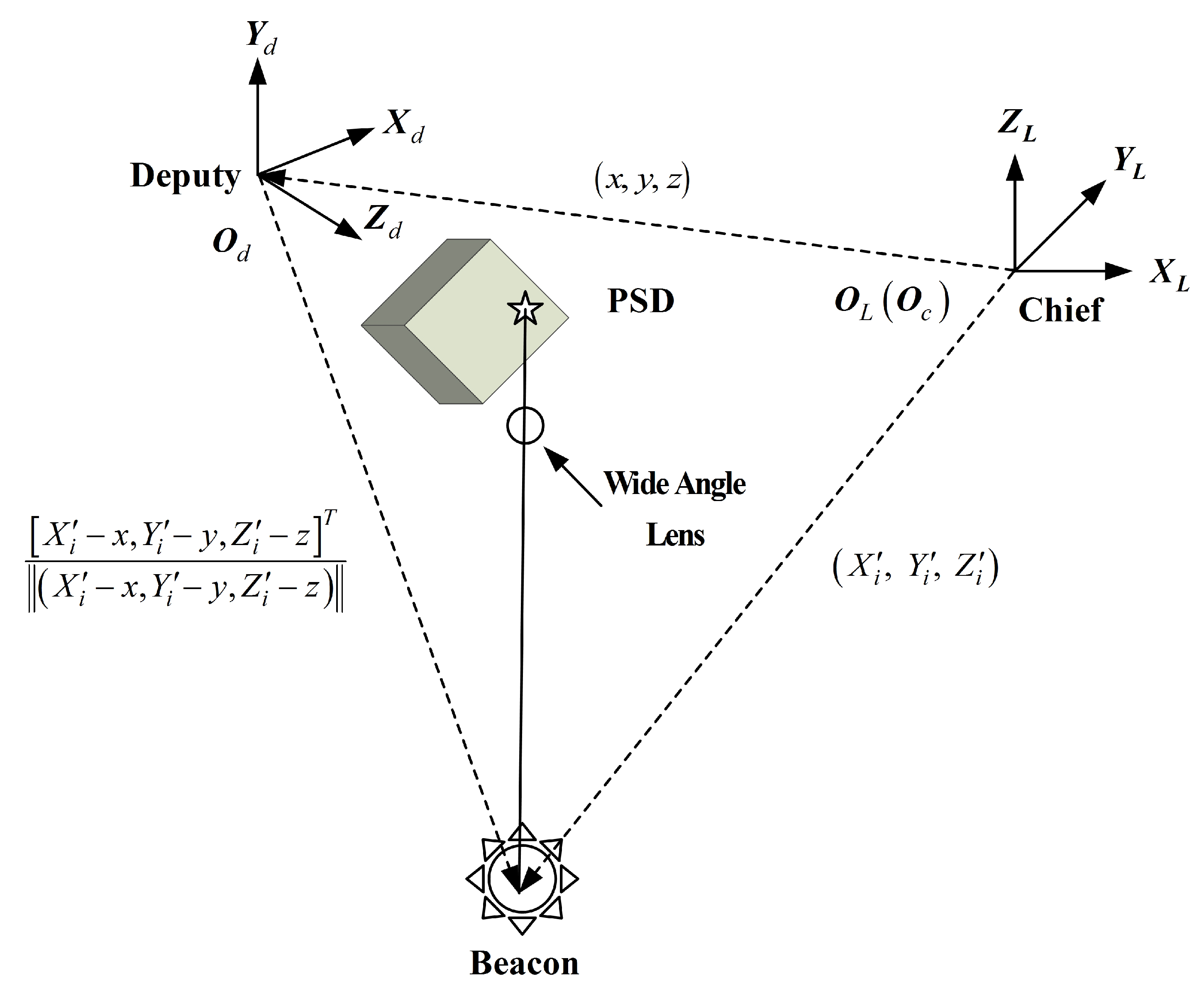
5.4. Measurement Model
5.5. Gyro Measurement Model
6. Numerical Simulations
6.1. Experimental Scenario Settings
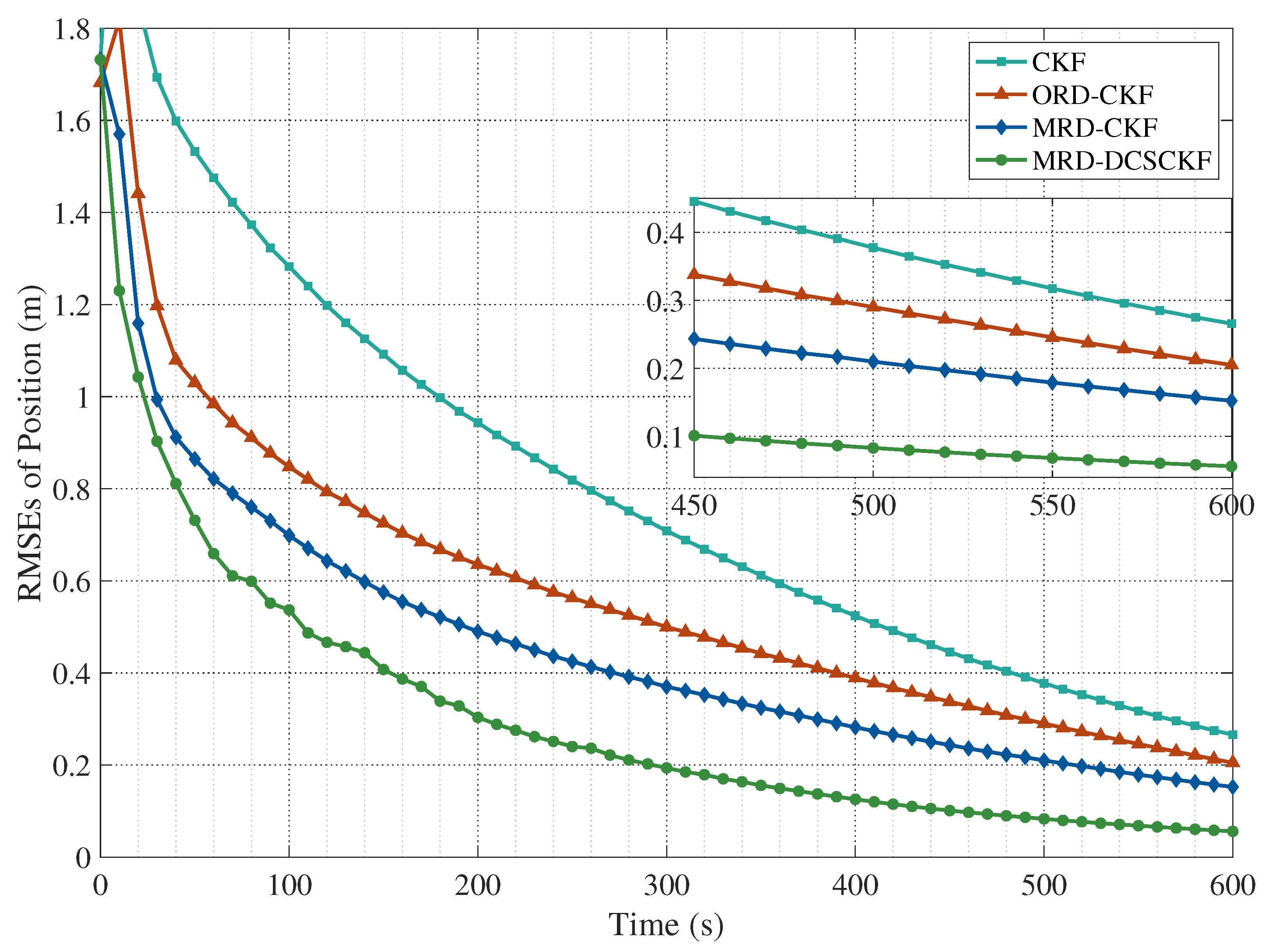
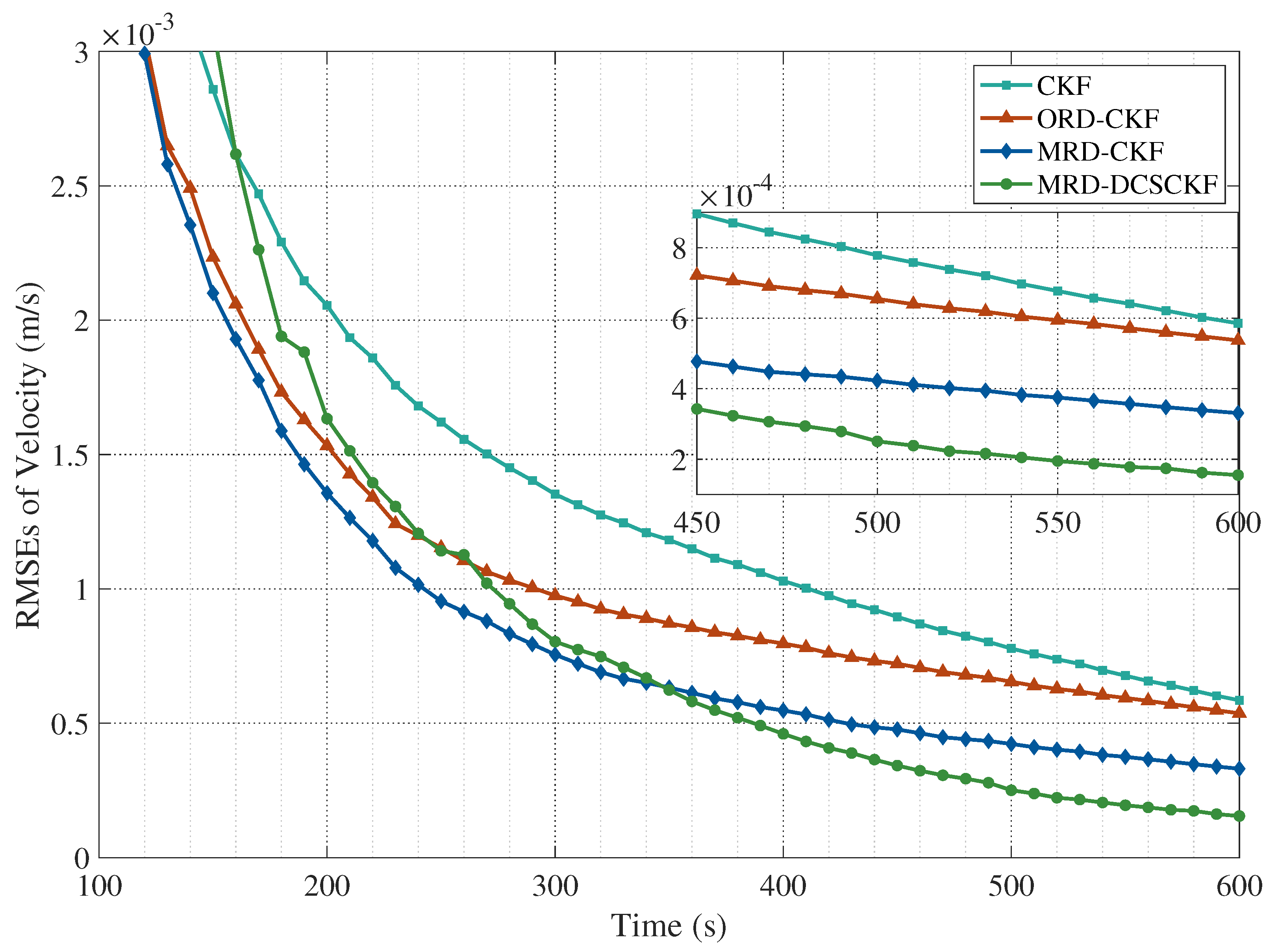
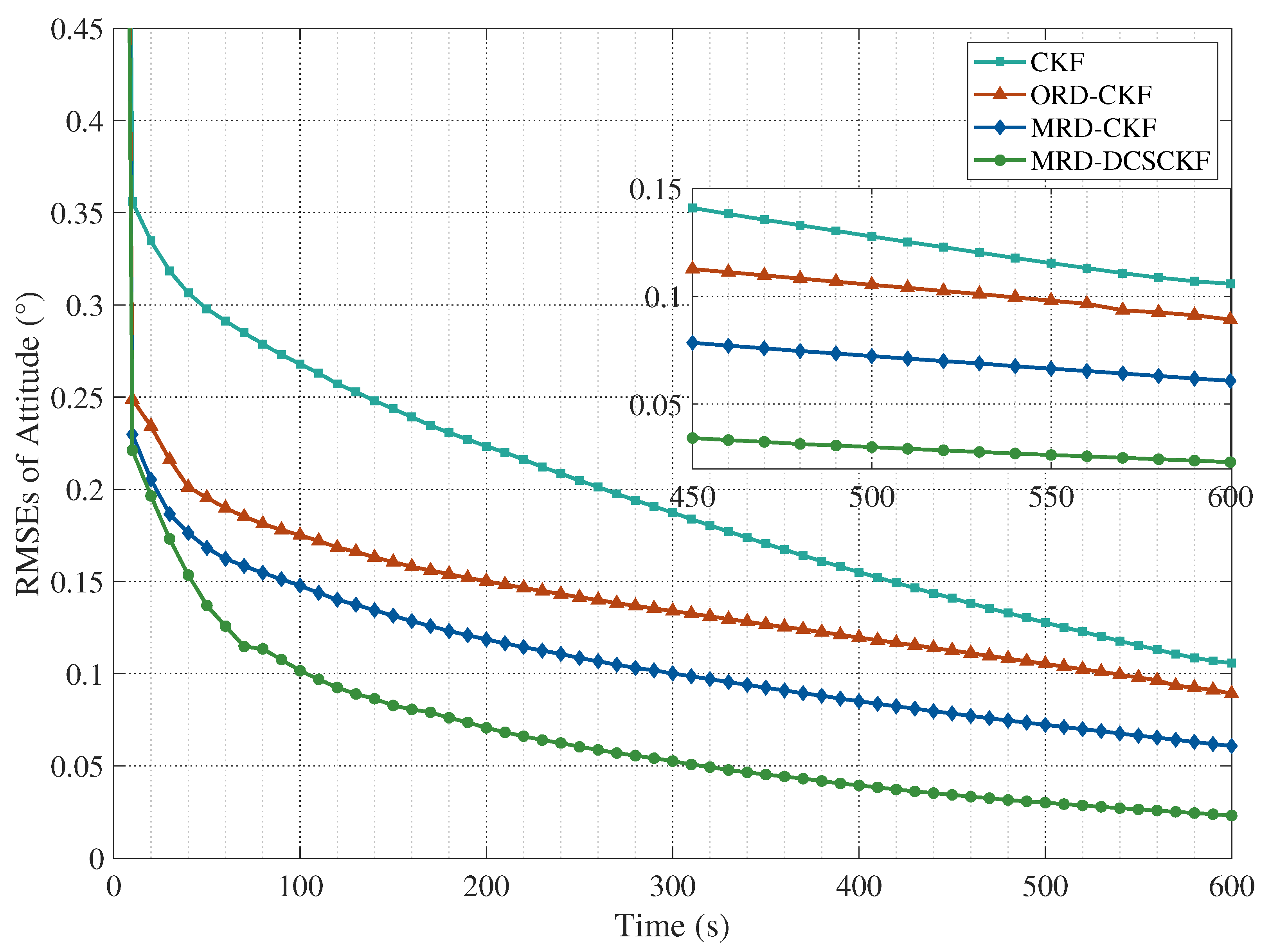
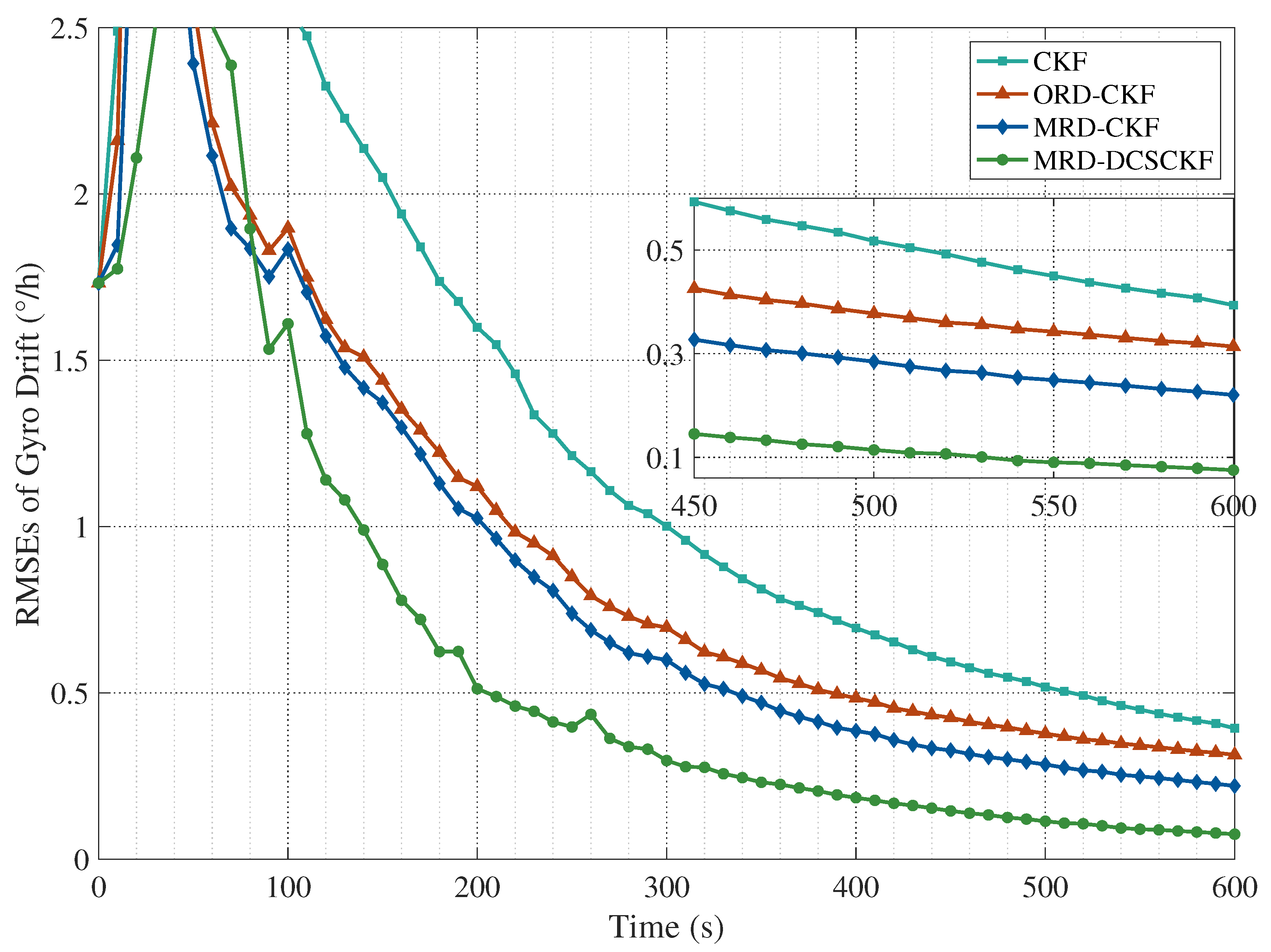
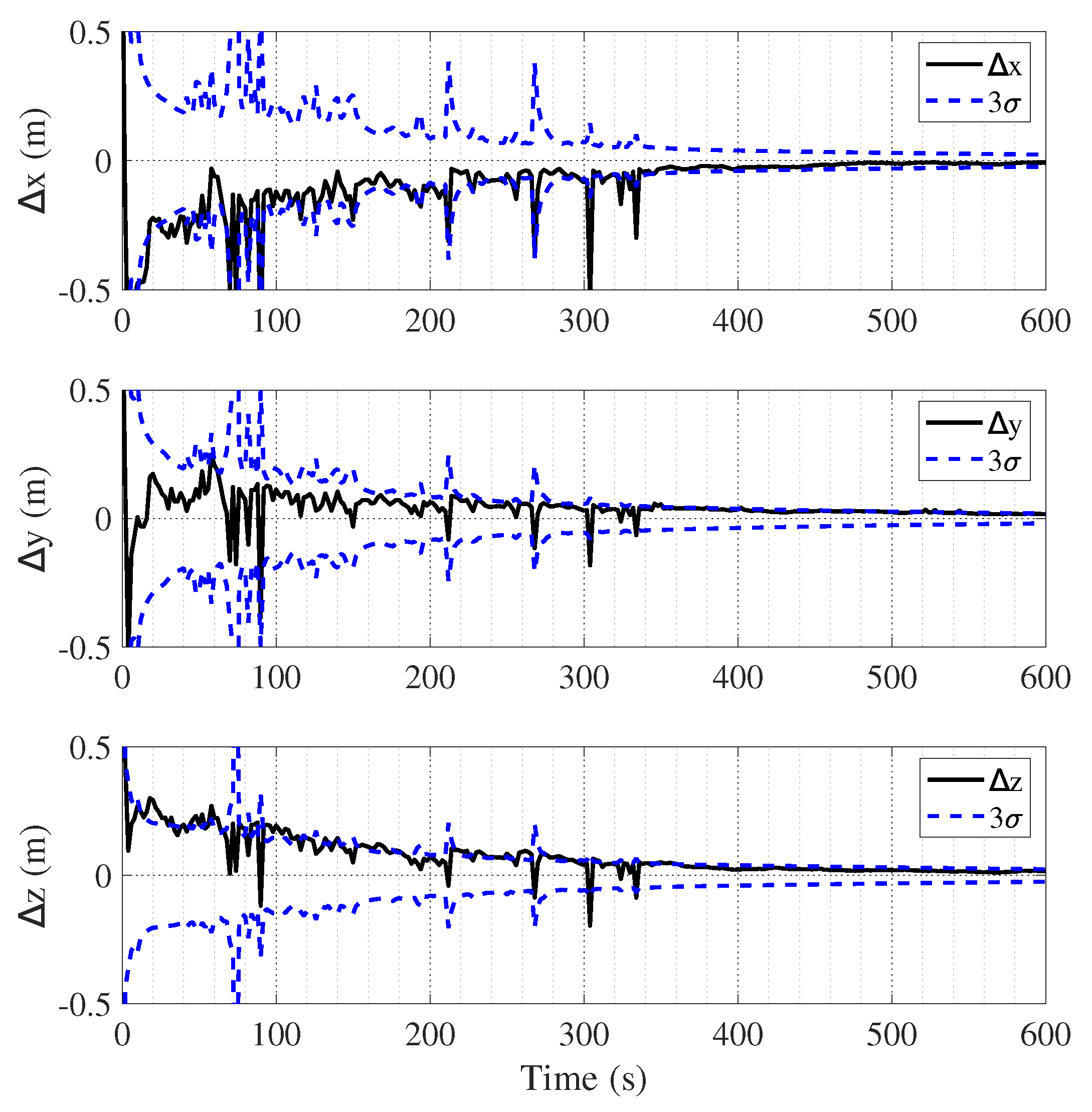
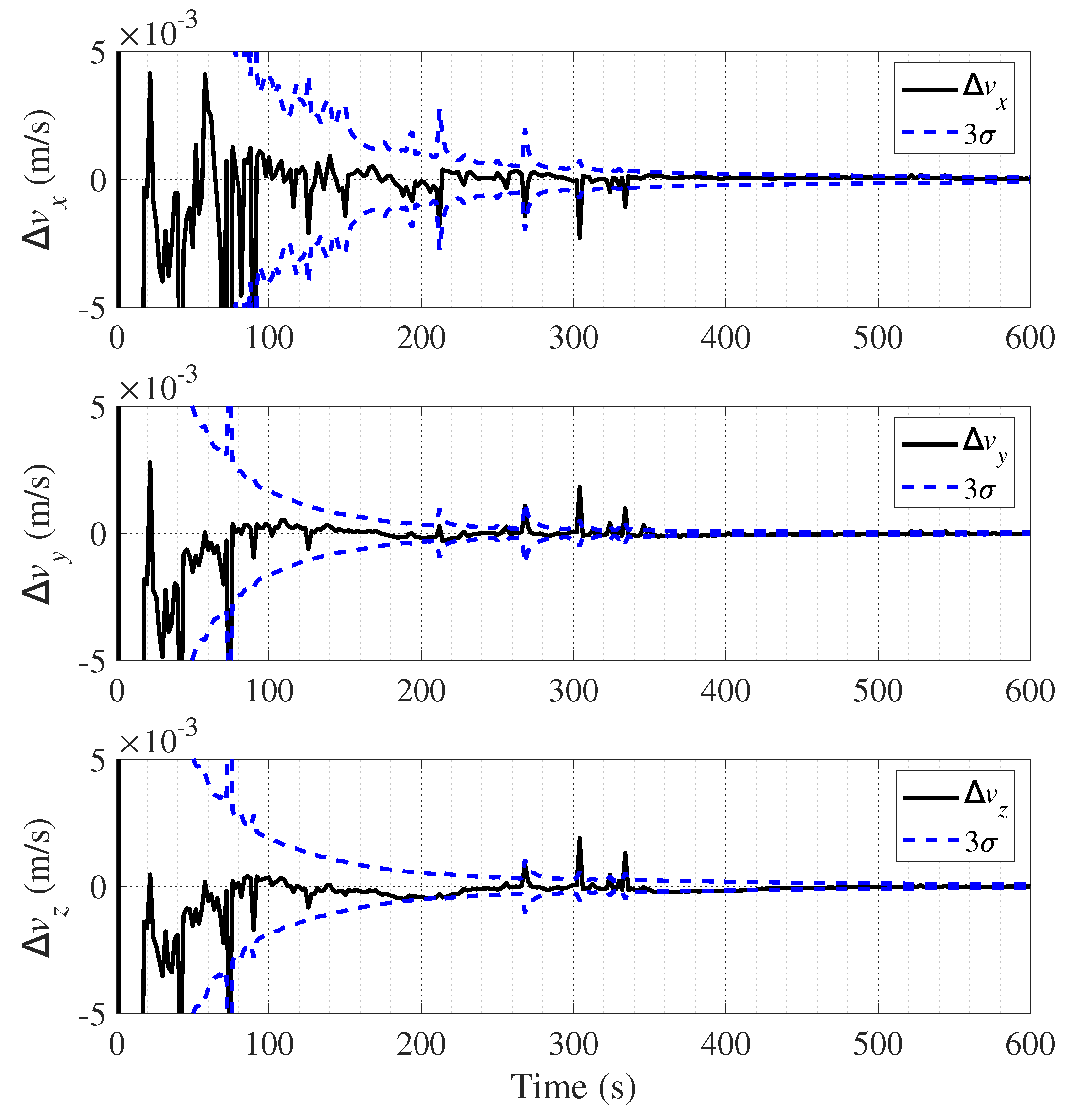
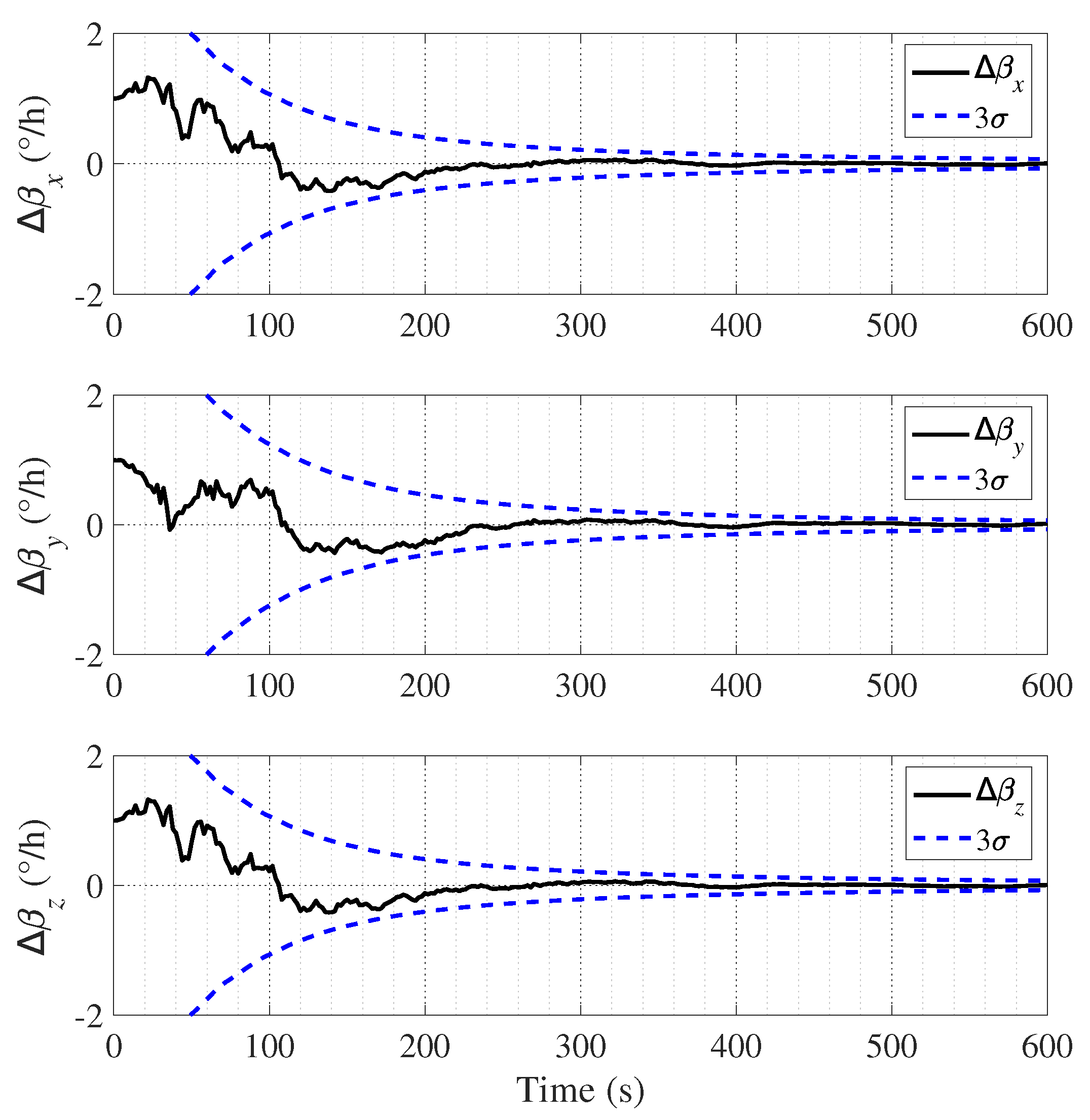
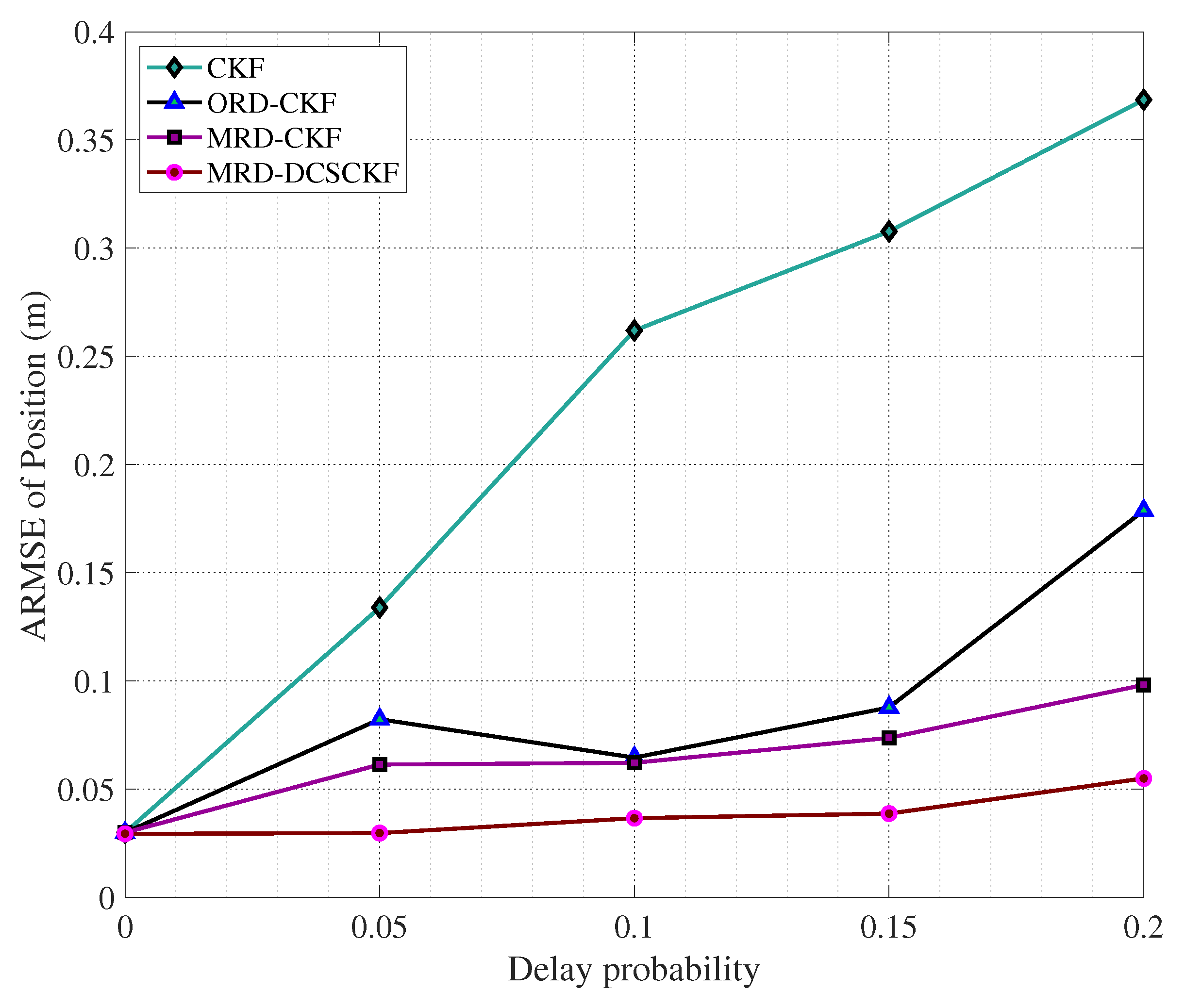
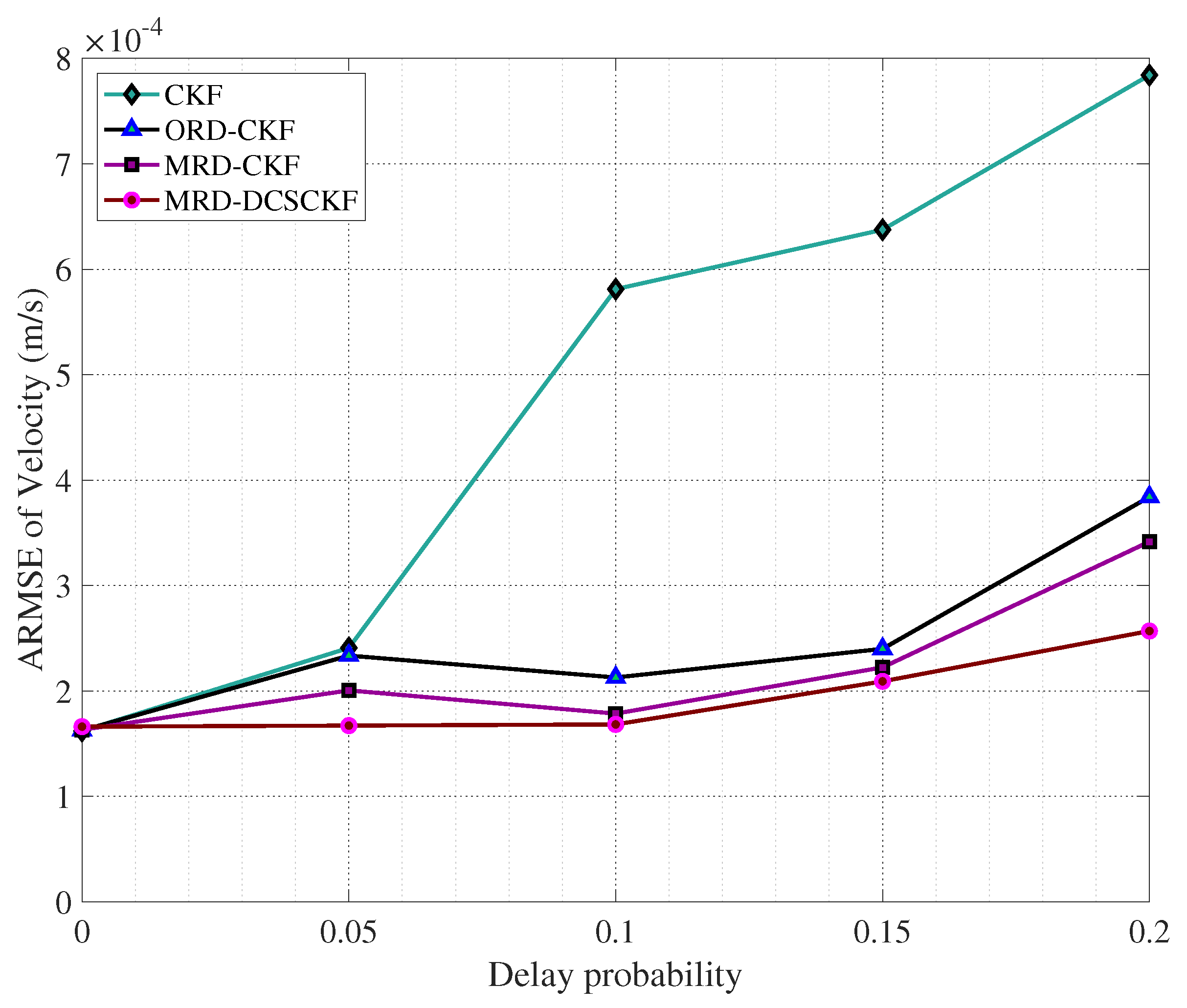
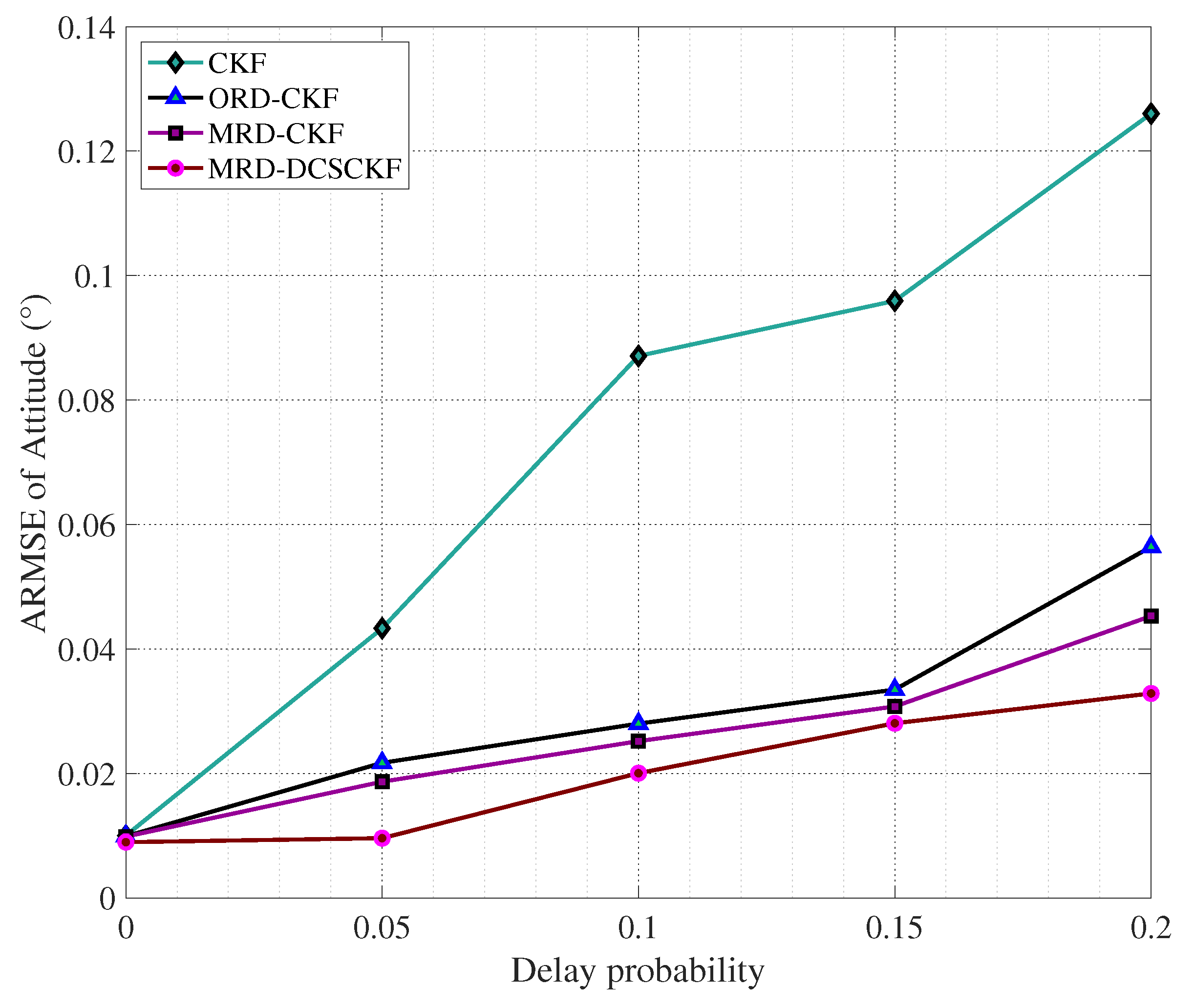
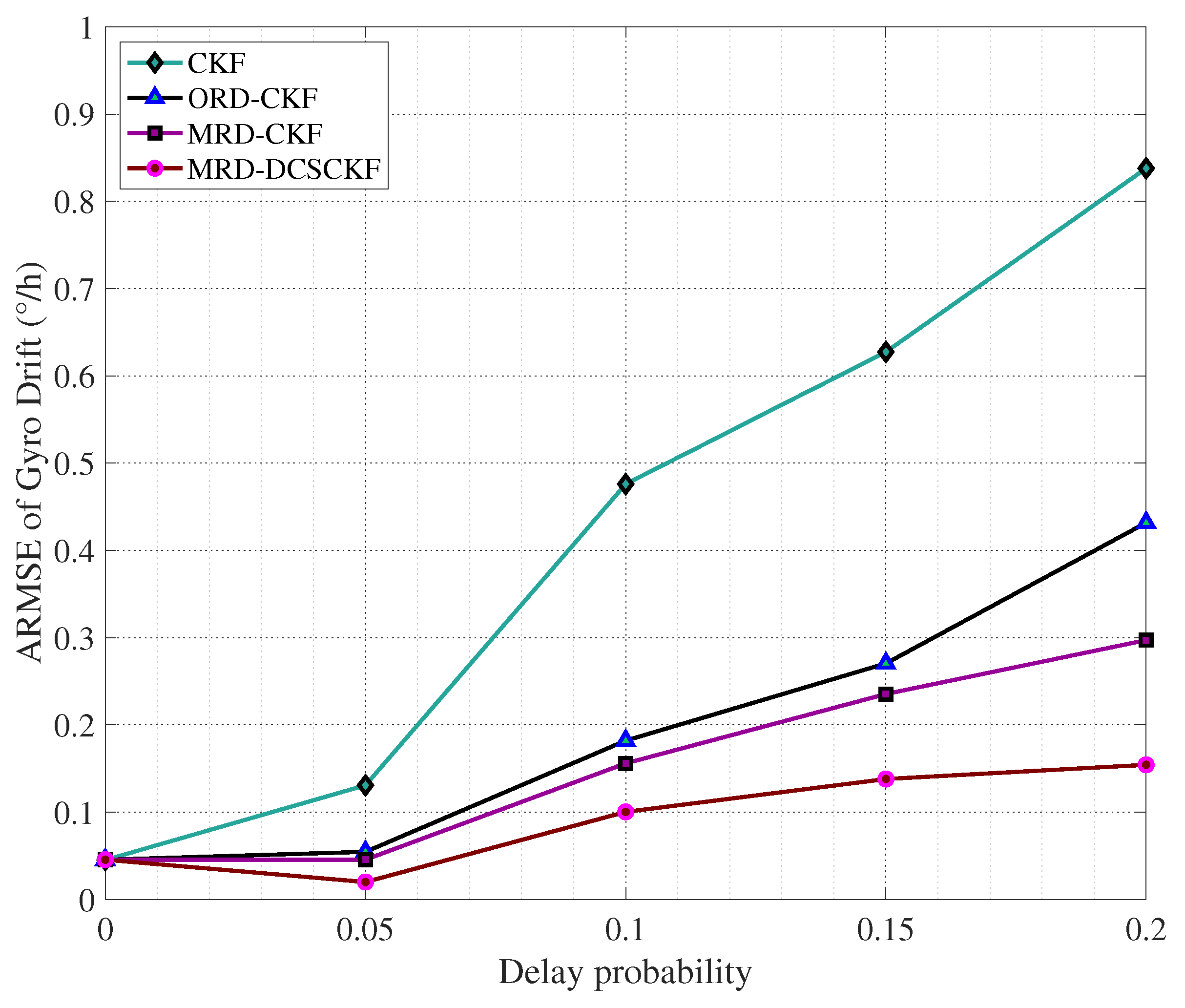
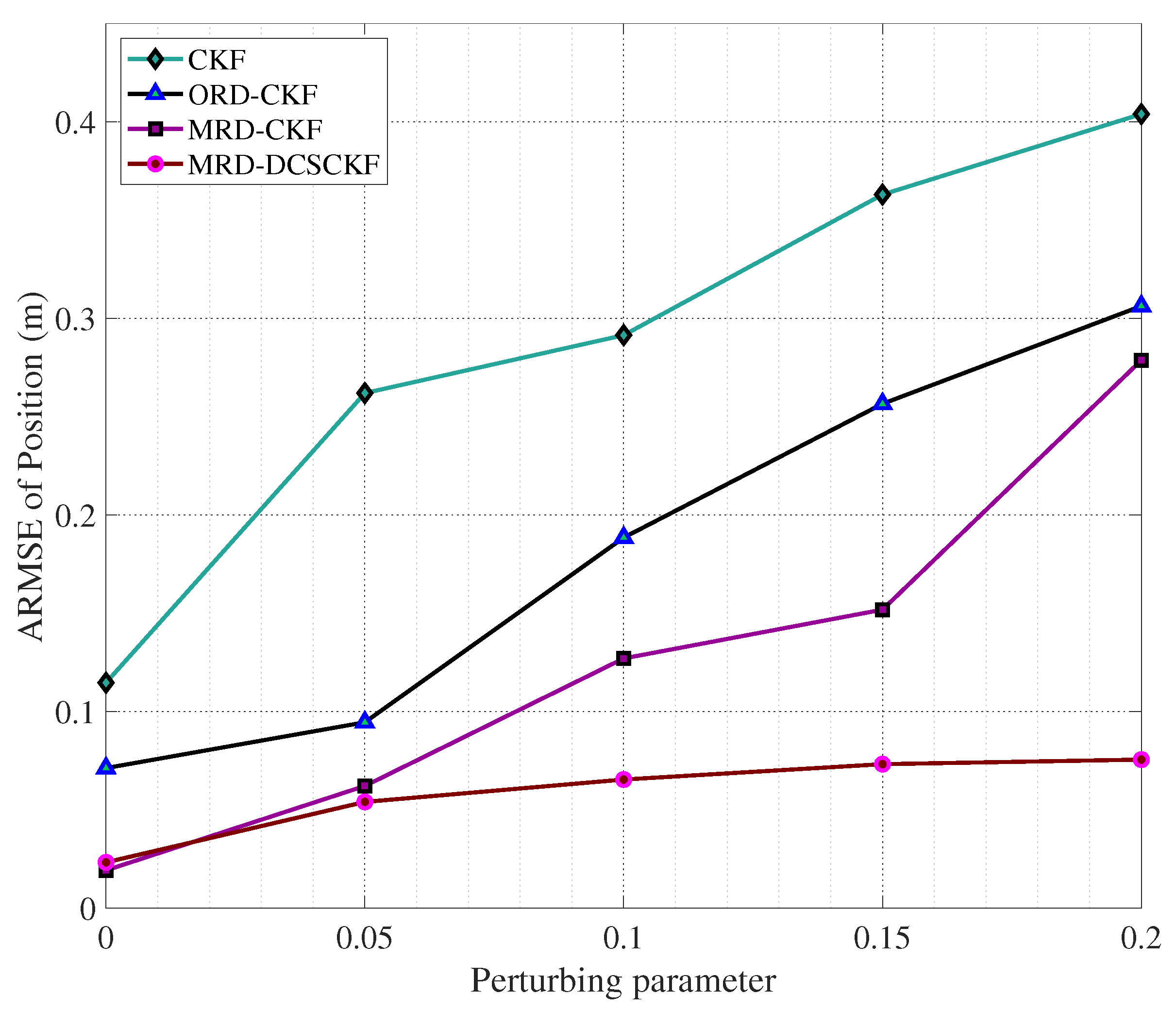
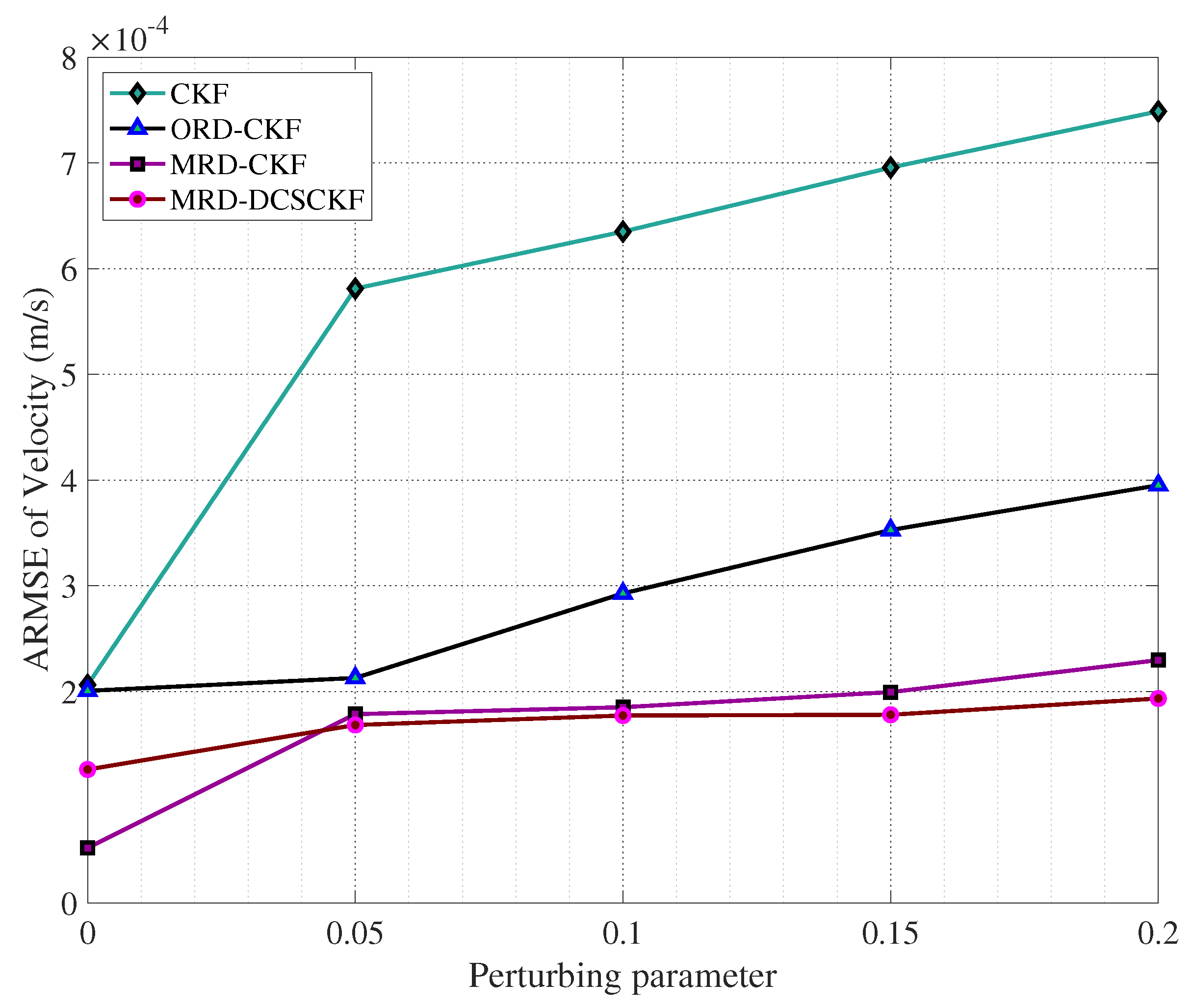
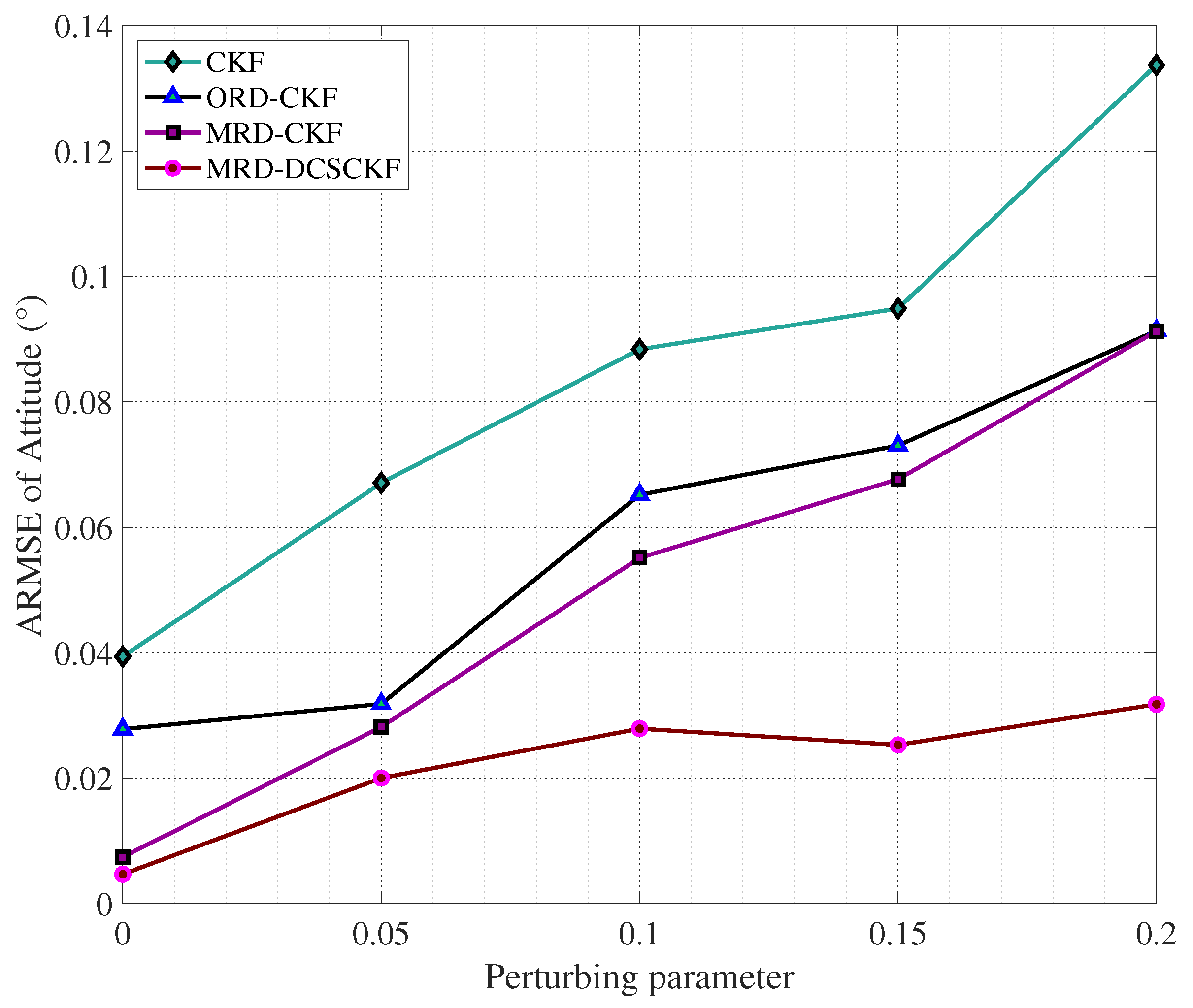
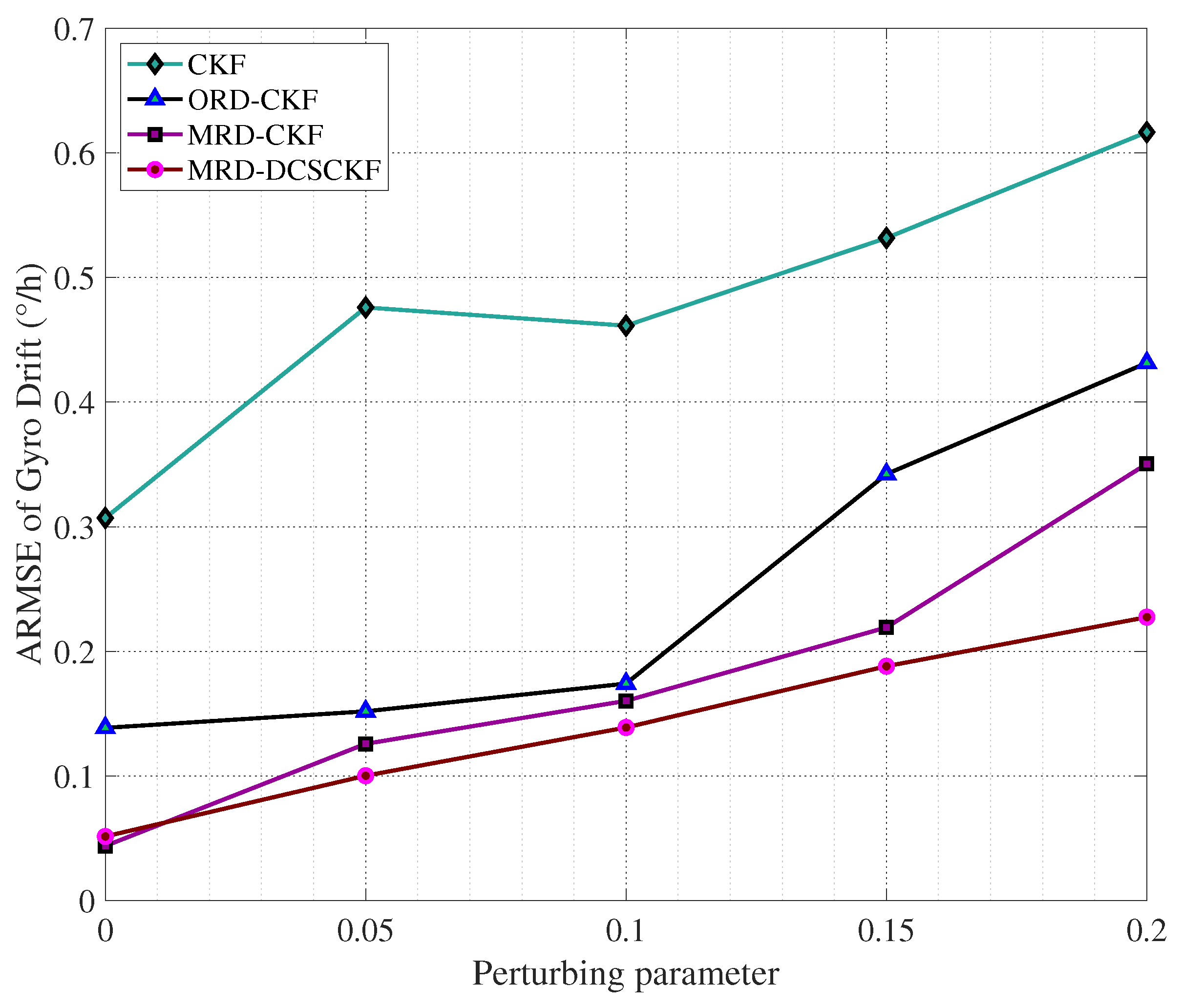
6.2. Simulation Results and Analyses
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| VISNAV | Vision-based navigation |
| DCS | Dynamic covariance scaling |
| BRV | Bernoulli random variable |
| PSD | Position sensing diode |
| LED | Light-emitting diode |
| SLAM | Simultaneous localization and mapping |
| ECI | Earth-centered inertial |
| LVLH | Local–vertical–local–horizontal |
| GRP | Generalized Rodrigues parameter |
| MCC | Maximum correntropy criterion |
| SE | State estimation |
| GA | Gaussian approximation |
| Probability density distribution | |
| KF | Kalman filter |
| PF | Particle filter |
| EKF | Extended Kalman filter |
| UKF | Unscented Kalman filter |
| UT | Unscented transformation |
| CKF | Cubature Kalman filter |
| GGLQ | Generalized Gauss–Laguerre quadrature |
| HCKF | High-degree cubature Kalman filter |
| MAEKF | Modified adaptive extended Kalman filter |
| STF | Student’s t filter |
| ORD-CKF | One-step randomly delayed cubature Kalman filter |
| MRD-CKF | Multiple-step randomly delayed cubature Kalman filter |
| MRD-DCSCKF | Multiple-step randomly delayed dynamic-covariance-scaling cubature Kalman filter |
Appendix A
Appendix A.1
Appendix A.2
Appendix A.3
References
- Segal, S.; Gurfil, P. Stereoscopic vision-based spacecraft relative state estimation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 6094. [Google Scholar]
- Molli, S.; Durante, D.; Boscagli, G.; Cascioli, G.; Racioppa, P.; Alessi, E.; Simonetti, S.; Vigna, L.; Iess, L. Design and performance of a Martian autonomous navigation system based on a smallsat constellation. Acta Astronaut. 2023, 203, 112–124. [Google Scholar] [CrossRef]
- Gargiulo, A.M.; Di Stefano, I.; Genova, A. Numerical Simulations for Planetary Rovers Safe Navigation and LIDAR Based Localization. In Proceedings of the 2021 IEEE 8th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Naples, Italy, 23–25 June 2021; pp. 418–423. [Google Scholar]
- Andolfo, S.; Petricca, F.; Genova, A. Precise pose estimation of the NASA Mars 2020 Perseverance rover through a stereo-vision-based approach. J. Field Robot. 2022. Online Version of Record before inclusion in an issue. [Google Scholar] [CrossRef]
- Junkins, J.L.; Hughes, D.C.; Wazni, K.P.; Pariyapong, V. Vision-based navigation for rendezvous, docking and proximity operations. In Proceedings of the 22nd Annual AAS Guidance and Control Conference, Breckenridge, CO, USA, 4–8 February 1999; Volume 99, p. 021. [Google Scholar]
- Lee, D.R.; Pernicka, H. Vision-based relative state estimation using the unscented Kalman filter. Int. J. Aeronaut. Space Sci. 2011, 12, 24–36. [Google Scholar] [CrossRef] [Green Version]
- Crassidis, J.L.; Markley, F.L. Unscented filtering for spacecraft attitude estimation. J. Guid. Control. Dyn. 2003, 26, 536–542. [Google Scholar] [CrossRef] [Green Version]
- Phisannupawong, T.; Kamsing, P.; Torteeka, P.; Channumsin, S.; Sawangwit, U.; Hematulin, W.; Jarawan, T.; Somjit, T.; Yooyen, S.; Delahaye, D.; et al. Vision-based spacecraft pose estimation via a deep convolutional neural network for noncooperative docking operations. Aerospace 2020, 7, 126. [Google Scholar] [CrossRef]
- Oumer, A.M.; Kim, D.K. Real-Time Fuel Optimization and Guidance for Spacecraft Rendezvous and Docking. Aerospace 2022, 9, 276. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. Sparse Gauss-Hermite quadrature filter with application to spacecraft attitude estimation. J. Guid. Control Dyn. 2011, 34, 367–379. [Google Scholar] [CrossRef]
- Zhenbing, Q.; Huaming, Q.; Guoqing, W. Adaptive robust cubature Kalman filtering for satellite attitude estimation. Chin. J. Aeronaut. 2018, 31, 806–819. [Google Scholar]
- Silvestrini, S.; Piccinin, M.; Zanotti, G.; Brandonisio, A.; Lunghi, P.; Lavagna, M. Implicit Extended Kalman Filter for Optical Terrain Relative Navigation Using Delayed Measurements. Aerospace 2022, 9, 503. [Google Scholar] [CrossRef]
- Chang, L.; Liu, J.; Chen, Z.; Bai, J.; Shu, L. Stereo Vision-Based Relative Position and Attitude Estimation of Non-Cooperative Spacecraft. Aerospace 2021, 8, 230. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef] [Green Version]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman filtering for continuous-discrete systems: Theory and simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. High-degree cubature Kalman filter. Automatica 2013, 49, 510–518. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Shen, B.; Wang, Z.; Wang, D.; Luo, J.; Pu, H.; Peng, Y. Finite-horizon filtering for a class of nonlinear time-delayed systems with an energy harvesting sensor. Automatica 2019, 100, 144–152. [Google Scholar] [CrossRef]
- Wang, X.; Liang, Y.; Pan, Q.; Zhao, C. Gaussian filter for nonlinear systems with one-step randomly delayed measurements. Automatica 2013, 49, 976–986. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, Y.; Zhang, Y.; Jia, G.; Chambers, J. An improved Kalman filter with adaptive estimate of latency probability. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 2259–2263. [Google Scholar] [CrossRef]
- Fei, Y.; Meng, T.; Jin, Z. Nano satellite attitude determination with randomly delayed measurements. Acta Astronaut. 2021, 185, 319–332. [Google Scholar] [CrossRef]
- Hermoso-Carazo, A.; Linares-Pérez, J. Extended and unscented filtering algorithms using one-step randomly delayed observations. Appl. Math. Comput. 2007, 190, 1375–1393. [Google Scholar] [CrossRef]
- Hermoso-Carazo, A.; Linares-Pérez, J. Unscented filtering algorithm using two-step randomly delayed observations in nonlinear systems. Appl. Math. Model. 2009, 33, 3705–3717. [Google Scholar] [CrossRef]
- Esmzad, R.; Esfanjani, R.M. Bayesian filter for nonlinear systems with randomly delayed and lost measurements. Automatica 2019, 107, 36–42. [Google Scholar] [CrossRef]
- Agamennoni, G.; Nieto, J.I.; Nebot, E.M. Approximate inference in state-space models with heavy-tailed noise. IEEE Trans. Signal Process. 2012, 60, 5024–5037. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Li, N.; Wu, Z.; Chambers, J.A. A novel robust Student’s t-based Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1545–1554. [Google Scholar] [CrossRef] [Green Version]
- Chen, R.; Zhang, C.; Wang, S.; Hong, L. Bivariate-Dependent Reliability Estimation Model Based on Inverse Gaussian Processes and Copulas Fusing Multisource Information. Aerospace 2022, 9, 392. [Google Scholar] [CrossRef]
- Karlgaard, C.D. Nonlinear regression Huber–Kalman filtering and fixed-interval smoothing. J. Guid. Control. Dyn. 2015, 38, 322–330. [Google Scholar] [CrossRef]
- Karlgaard, C.D.; Schaub, H. Huber-based divided difference filtering. J. Guid. Control. Dyn. 2007, 30, 885–891. [Google Scholar] [CrossRef]
- Chen, B.; Liu, X.; Zhao, H.; Principe, J.C. Maximum correntropy Kalman filter. Automatica 2017, 76, 70–77. [Google Scholar] [CrossRef] [Green Version]
- Mu, R.; Su, B.; Chen, J.; Li, Y.; Cui, N. Multiple-Step Randomly Delayed Adaptive Robust Filter With Application to INS/VNS Integrated Navigation on Asteroid Missions. IEEE Access 2020, 8, 118853–118868. [Google Scholar] [CrossRef]
- Qin, W.; Wang, X.; Bai, Y.; Cui, N. Arbitrary-step randomly delayed robust filter with application to boost phase tracking. Acta Astronaut. 2018, 145, 304–318. [Google Scholar] [CrossRef]
- Li, S.; Cui, N.; Mu, R. Dynamic-Covariance-Scaling-Based Robust Sigma-Point Information Filtering. J. Guid. Control Dyn. 2021, 44, 1677–1684. [Google Scholar] [CrossRef]
- Agarwal, P. Robust Graph-Based Localization and Mapping. Ph.D. Thesis, Albert-Ludwigs-Universität Freiburg, Freiburg, Germany, 2015. [Google Scholar]
- Sünderhauf, N.; Protzel, P. Switchable constraints for robust pose graph SLAM. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 1879–1884. [Google Scholar]
- Capó-Lugo, P.A.; Bainum, P.M. Digital LQR control scheme to maintain the separation distance of the NASA benchmark tetrahedron constellation. Acta Astronaut. 2009, 65, 1058–1067. [Google Scholar] [CrossRef]
- Tang, X.; Liu, Z.; Zhang, J. Square-root quaternion cubature Kalman filtering for spacecraft attitude estimation. Acta Astronaut. 2012, 76, 84–94. [Google Scholar] [CrossRef]
- Kim, S.G.; Crassidis, J.L.; Cheng, Y.; Fosbury, A.M.; Junkins, J.L. Kalman filtering for relative spacecraft attitude and position estimation. J. Guid. Control Dyn. 2007, 30, 133–143. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, H.; Lu, H.; Zhang, S.; Cai, H.; Qian, S. Cubature Kalman filtering for relative spacecraft attitude and position estimation. Acta Astronaut. 2014, 105, 254–264. [Google Scholar] [CrossRef]
- Farrenkopf, R. Analytic steady-state accuracy solutions for two common spacecraft attitude estimators. J. Guid. Control 1978, 1, 282–284. [Google Scholar] [CrossRef]
- Li, S.; Wang, P.; Mu, R.; Cui, N. Augmented Robust Cubature Kalman Filter Applied in Re-Entry Vehicle Tracking. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Virtual, 6–20 March 2021; pp. 1–10. [Google Scholar]
- Su, B.; Mu, R.; Long, T.; Li, Y.; Cui, N. Variational Bayesian adaptive high-degree cubature Huber-based filter for vision-aided inertial navigation on asteroid missions. IET Radar Sonar Navig. 2020, 14, 1391–1401. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beacon No. | x (m) | y (m) | z (m) |
|---|---|---|---|
| 1 | 0.5 | 0.5 | 0.0 |
| 2 | −0.5 | 0.5 | 0.0 |
| 3 | 0.5 | −0.5 | 0.0 |
| 4 | −0.5 | −0.5 | 0.0 |
| 5 | 0.2 | 0.5 | 0.1 |
| 6 | 0.1 | 0.2 | −0.1 |
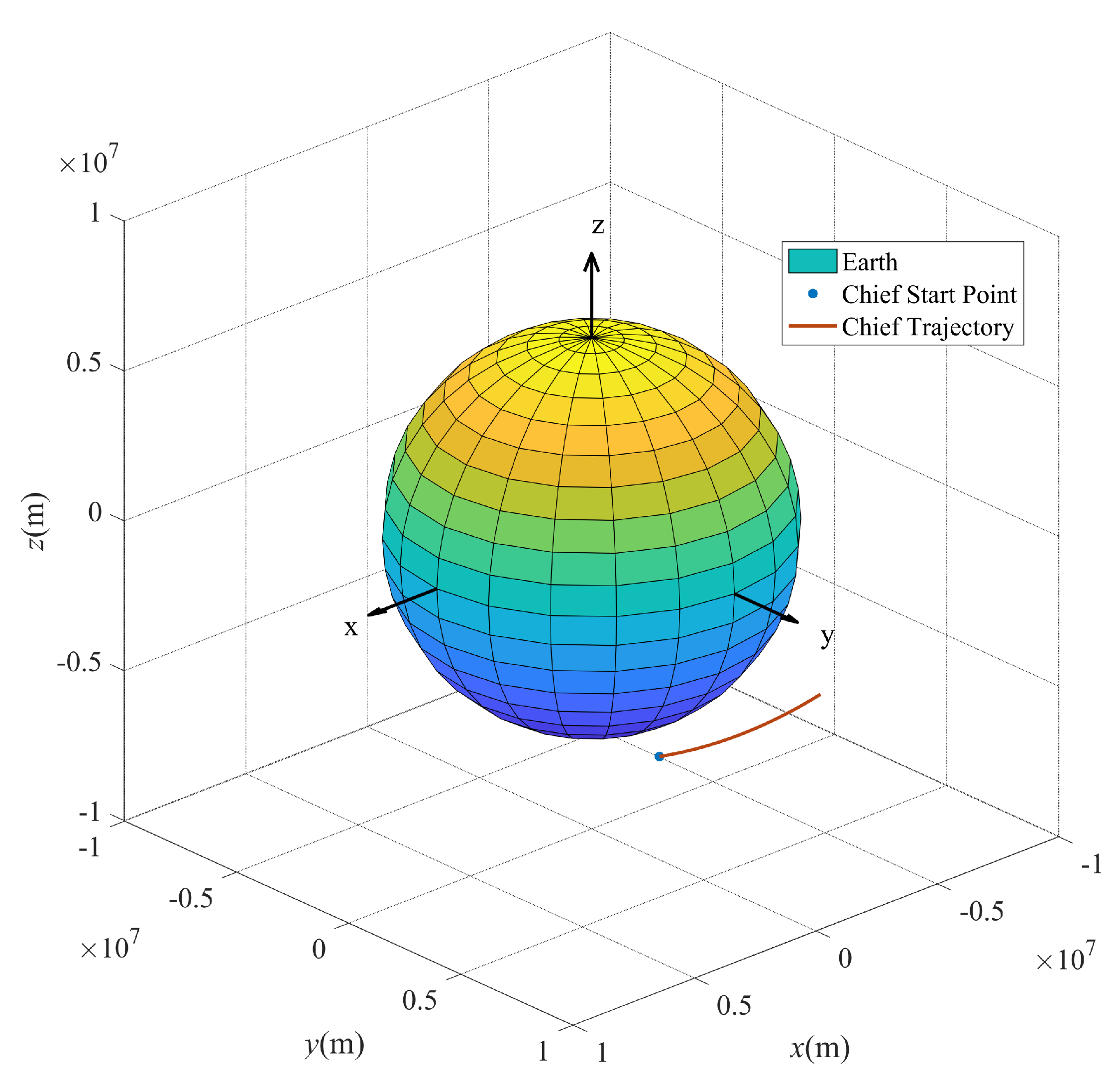
| Orbital Elements | Corresponding Value |
|---|---|
| Semi-major axis | 26,555.137 km |
| Eccentricity e | 0.7395 |
| Orbit inclination | |
| Argument of perigee | |
| Right ascension of the ascending node | |
| True anomaly |
| Parameter | Corresponding Value |
|---|---|
| Number of Monte Carlo simulations | 100 |
| Discrete sampling period | s |
| The update interval of camera | s |
| Simulation time | 600 s |
| Perturbing parameter | |
| Tuning parameters of kernel | 5 |
| Number of delay steps | 3 |
| Delay probability | |
| Delay probability for each step | |
| Initial relative position | (m) |
| Initial relative velocity | (m/s) |
| Initial attitude quaternion of chief spacecraft | |
| Initial relative attitude quaternion | |
| Initial generalized Rodrigues parameters | |
| Chief spacecraft angular velocity | (rad/s) |
| Deputy spacecraft angular velocity | (rad/s) |
| Gyro drift | |
| Angle random walk | |
| Angular rate random walk | |
| Power spectral density of perturbation acceleration | |
| Process noise covariance matrix | |
| Initial state covariance matrix | |
| Covariance matrix of measurement noise | |
| Covariance matrix of contaminated measurement noise | |
| Initial state vector true value | |
| Initial state vector estimate |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, R.; Chu, Y.; Zhang, H.; Liang, H. A Multiple-Step, Randomly Delayed, Robust Cubature Kalman Filter for Spacecraft-Relative Navigation. Aerospace 2023, 10, 289. https://doi.org/10.3390/aerospace10030289
Mu R, Chu Y, Zhang H, Liang H. A Multiple-Step, Randomly Delayed, Robust Cubature Kalman Filter for Spacecraft-Relative Navigation. Aerospace. 2023; 10(3):289. https://doi.org/10.3390/aerospace10030289
Chicago/Turabian StyleMu, Rongjun, Yanfeng Chu, Hao Zhang, and Hao Liang. 2023. "A Multiple-Step, Randomly Delayed, Robust Cubature Kalman Filter for Spacecraft-Relative Navigation" Aerospace 10, no. 3: 289. https://doi.org/10.3390/aerospace10030289
APA StyleMu, R., Chu, Y., Zhang, H., & Liang, H. (2023). A Multiple-Step, Randomly Delayed, Robust Cubature Kalman Filter for Spacecraft-Relative Navigation. Aerospace, 10(3), 289. https://doi.org/10.3390/aerospace10030289