1. Introduction
Automatic dependent surveillance-broadcast (ADS-B) is an air traffic surveillance technology which relies on aircraft broadcasting their identity, Global Navigation Satellite System (GNSS)-derived position and other information derived from onboard systems [
1,
2,
3,
4,
5,
6,
7]. The information can be received by air traffic control ground stations for surveillance purposes or received by other aircraft to facilitate situational awareness and allow self-separation. ADS-B operates in the 1090 MHz extended squitter mode or the 978 MHz universal access transceiver mode [
8]. Compared with current radar surveillance systems, ADS-B offers improved safety and efficiency of flight at a lower overall cost and thus is seen as a key enabler for future air traffic management systems possessing higher levels of safety, capacity, efficiency and environmental sustainability [
9].
A significant step forward for ADS-B in recent years is the development of space-based ADS-B, which utilizes artificial satellites, mainly low Earth orbiting (LEO) satellites, to receive aircraft ADS-B position reports and provides cost-effective surveillance coverage in remote regions such as the oceans, polar regions and deserts [
10]. In 2013, the European Space Agency’s Proba-V minisatellite verified for the first time the feasibility of detection of ADS-B signals in space [
11]. The following years witnessed a number of space-based ADS-B demonstrations conducted on nanosatellite platforms, including Danish GOMX series satellites [
12,
13] and Chinese STU-2C satellites [
10]. More recently, companies such as Aireon and Spire Global have gone a step further. Aireon in 2019 accomplished its construction of global air traffic surveillance by deploying ADS-B receivers on the Iridium NEXT satellite constellation [
14]. Spire Global is building a nanosatellite constellation for aviation ADS-B and its first member nanosatellites were launched in 2018 [
15]. It is foreseen that more and more satellites carrying ADS-B receivers will be launched into space to meet the rapidly growing demand for next-generation air traffic surveillance.
Considering the fact that low-cost, small satellites account for an important proportion of space-based ADS-B platforms, it is attractive to exploit more applications of spaceborne ADS-B receivers in order to make full use of onboard resources. In 2017, Zhou et al. [
16] proposed a novel idea of using the signal-to-noise ratio (SNR) of ADS-B signals for satellite attitude determination. The principle resembles that of attitude determination using GNSS SNR measurements [
17,
18,
19], but the signal characteristics, visibility condition and observability geometry are entirely different. They conducted a link budget analysis and designed a nonlinear least squares estimation algorithm for estimation of the orientation of ADS-B-receiving antenna [
16]. Simulation results showed that attitude accuracies ranging from 0.02 degrees to 10 degrees are achieved and the accuracy is mainly influenced by the number of visible aircraft and the accuracy of SNR measurements. Many methods of spaceborne attitude determination have existed over the history of space flight. Representative examples include the magnetometer-based attitude determination, the Global Navigation Satellite System (GNSS)-based attitude determination, the star tracker-based attitude determination, etc. Although these methods have high reliability, their cost becomes a barrier for the realization of low-cost spacecraft. The advantage of ADS-B-based satellite attitude determination is its “zero hardware cost”, as the ADS-B receiver is already the primary payload of air traffic monitoring satellites. In fact, several of these mentioned methods are usually applied together in one satellite in engineering practice. As a low-cost method, ADS-B-based satellite attitude determination can be especially suitable for small satellites.
The preliminary work in [
16] utilizes only one ADS-B-receiving antenna and fulfills only single-axis attitude determination. If two or more noncollinear antennas are deployed and their orientations relative to the satellite’s body frame are known beforehand, a three-axis attitude of the satellite can be determined. In addition to a multiple-antenna-receiving system, a multibeam antenna can also be used for three-axis attitude determination. Multibeam antennas are nowadays designed for space-based ADS-B [
20,
21], among which a seven-beam antenna designed by Aireon has been implemented on Iridium NEXT satellites [
14]. However, it should be noted that the receiving antenna type is not a major concern of this study, in that the underlying principle of attitude determination applies to both receiving systems listed above. Attitude determination is essential for accurate attitude control so that the control subsystem can meet mission pointing requirements. Especially in recent years, due to the requirements of highly flexible spacecraft attitude control and the presence of various space disturbance torques, a set of novel attitude control methods have been proposed, such as fault-tolerant attitude control [
22], energy-efficient constrained attitude control [
23], tan-type barrier Lyapunov function (BLF)-based attitude tracking control [
24] and adaptive constrained attitude control [
25]. Considering the ability to perform three-axis attitude determination, ADS-B-based attitude determination could provide a low-cost and accurate solution for the realization of attitude control.
The present study Investigates the use of the SNR of ADS-B signals for three-axis attitude determination of a LEO satellite, where for simplicity a double-antenna-receiving system is considered. Two estimation methods, a deterministic method based on the Quaternion Estimator (QUEST) and a statistical method based on the nonlinear least squares estimator (NLS), are presented. Furthermore, in order to reduce the effect of observation noise, attitude determination using MEMS gyro data integrated with ADS-B receivers is explored. A multiplicative extended Kalman filter (MEKF) is designed, and its performance is examined.
In summary, this paper makes two principal contributions. The first is the development of an attitude determination method based on the SNR measurements of ADS-B signals using a double-antenna-receiving system. Accurate three-axis attitude determination is then enabled. Thus, the proposed method in this paper is more practical for on-orbit applications compared with the method introduced by [
16], in which only single-axis attitude could be determined. The second contribution is the presentation of three attitude estimation methods (QUEST, NLS and MEKF) for ADS-B-based attitude determination. A novel attitude determination scheme is proposed in which MEMS gyro data are integrated with ADS-B receivers to reduce the effect of observation noise, and a corresponding MEKF estimation method is designed. The potential accuracy of ADS-B-based attitude determination is revealed by the evaluation and comparison of the three estimation methods’ results.
The rest of this paper is organized as follows:
Section 2 introduces the basic principle of ADS-B-based three-axis satellite attitude determination. The two estimation methods which transform the SNR measurements of ADS-B signals into attitude solutions are presented in
Section 3.
Section 4 presents the MEKF algorithm design for integrated ADS-B/gyro attitude determination. Numerical simulation is given in
Section 5 and the performances of the above three algorithms are compared. Finally,
Section 6 draws a conclusion and gives directions for future work.
2. Principle of ADS-B-Based Three-Axis Attitude Determination
As stated in [
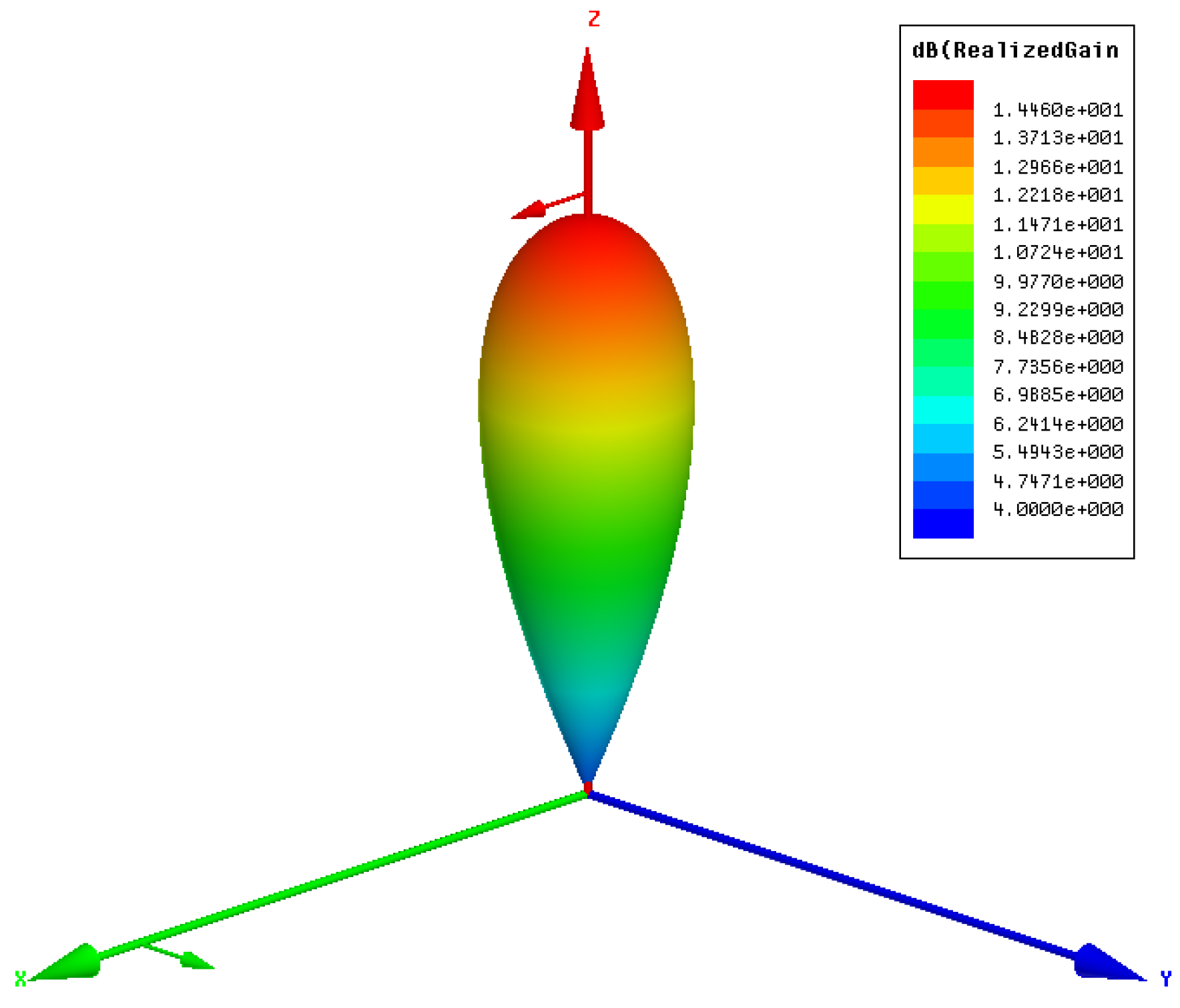
16], the idea of ADS-B-based attitude determination is inspired by attitude determination using GNSS SNR measurements. The core of this method lies in the anisotropy and strong directivity of ADS-B-receiving antenna. The measured value of the SNR of ADS-B signals is mainly determined by three factors: the signal power at the receiver position, antenna gain pattern and antenna orientation. The aircraft position information is transmitted by ADS-B signals. The satellite position can be determined by an onboard GNSS receiver. With a known signal transmitting power, the signal power at the ADS-B receiver position can be derived from aircraft and satellite positions in combination with a path loss model. If the antenna gain pattern is also known, the SNR of ADS-B signals is a function of antenna orientation only, more specifically, the relative orientation between antenna boresight and aircraft-satellite line-of-sight (LOS).
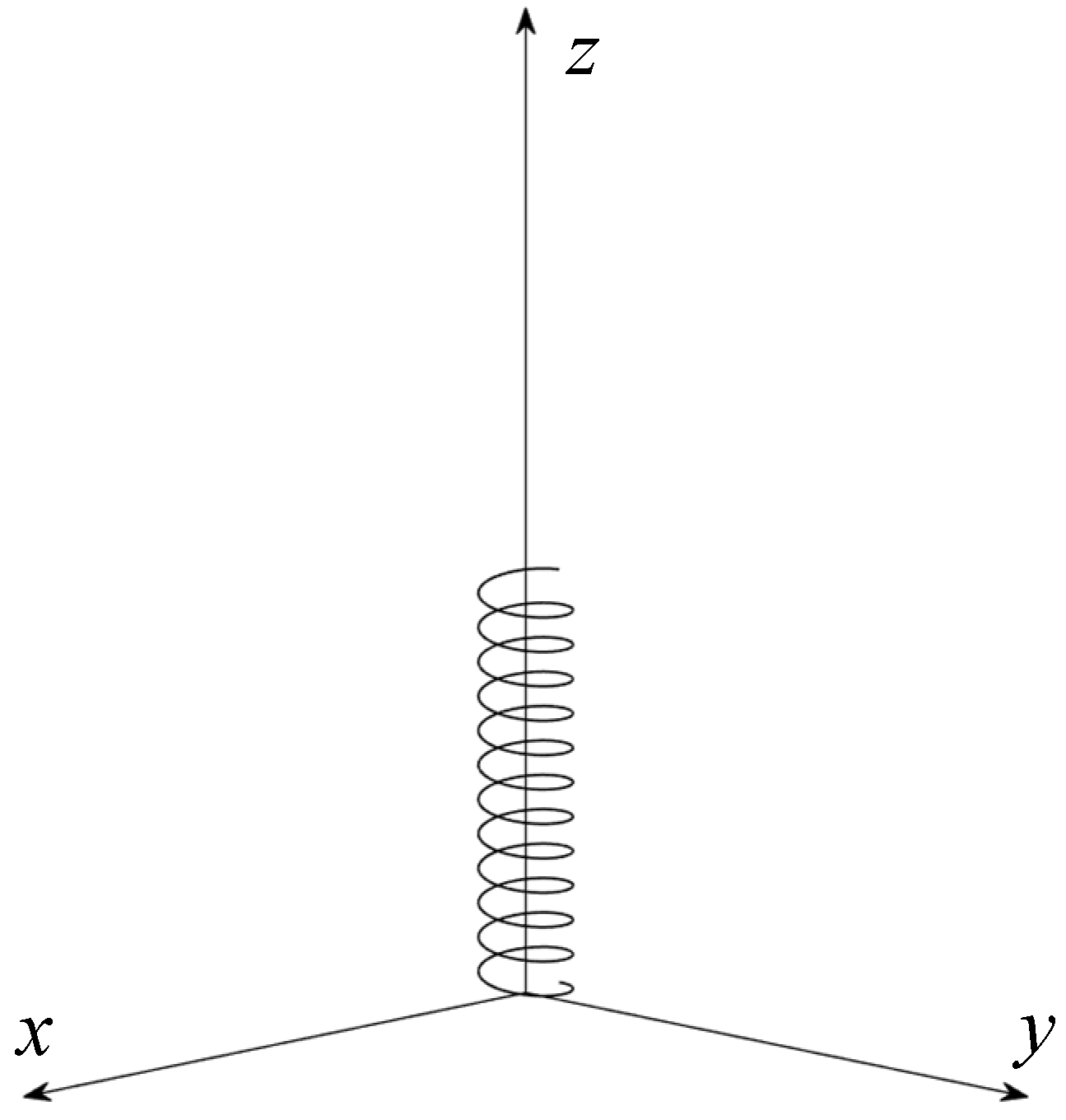
Consider a spaceborne ADS-B receiver connected to two receiving antennas, e.g., helical antennas which have been deployed on GOMX series satellites [
17,
18].
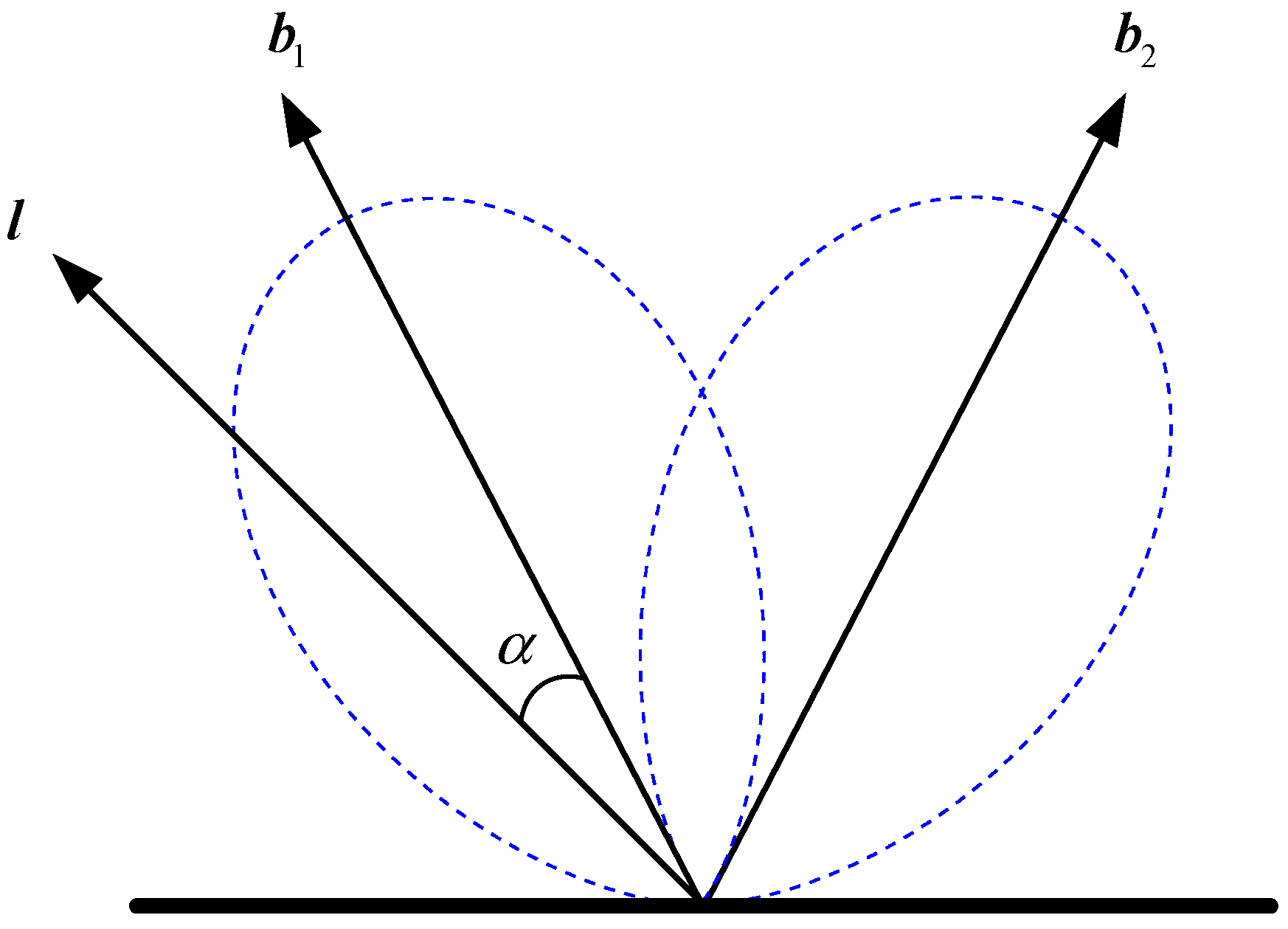
Figure 1 gives an illustration of antenna configuration. The two antennas have identical gain pattern models and their boresight vectors are represented by two unit vectors,
and
, respectively. The gain of each antenna has its highest value along the boresight vector and decreases with increasing of the off-boresight angle. The azimuthal variations are small enough to be negligible. Assume that an ADS-B signal transmitted from an aircraft is received by the first antenna. The LOS vector from the satellite to the aircraft can be computed from their known positions and is represented by a unit vector
l. Let
α denote the off-boresight angle of
l with respect to
. As the SNR of the signal is a strictly monotonic function of the off-boresight angle,
α can be uniquely determined from the measured value of the SNR. Furthermore, if an ADS-B signal of a second aircraft from a different direction is also received by the same antenna, its boresight vector
can be estimated from the two derived off-boresight values. This process is called single-axis attitude determination and has been well studied in [
16].
Similar to , the boresight vector can also be estimated if the second antenna receives ADS-B signals of two aircraft from different directions. The aircraft and satellite positions are usually expressed in the Earth-centered Earth-fixed (ECEF) frame in consideration that they are derived from GNSS receivers. Accordingly, the estimation of boresight vectors and refers to the ECEF frame. The estimated coordinates of and can be further transformed to the satellite’s Vehicle Velocity Local Horizontal (VVLH) frame via orbital information. Finally, since the local coordinates of and in the satellite’s body frame are known beforehand, the satellite’s three-axis orientation relative to the VVLH frame can be determined.
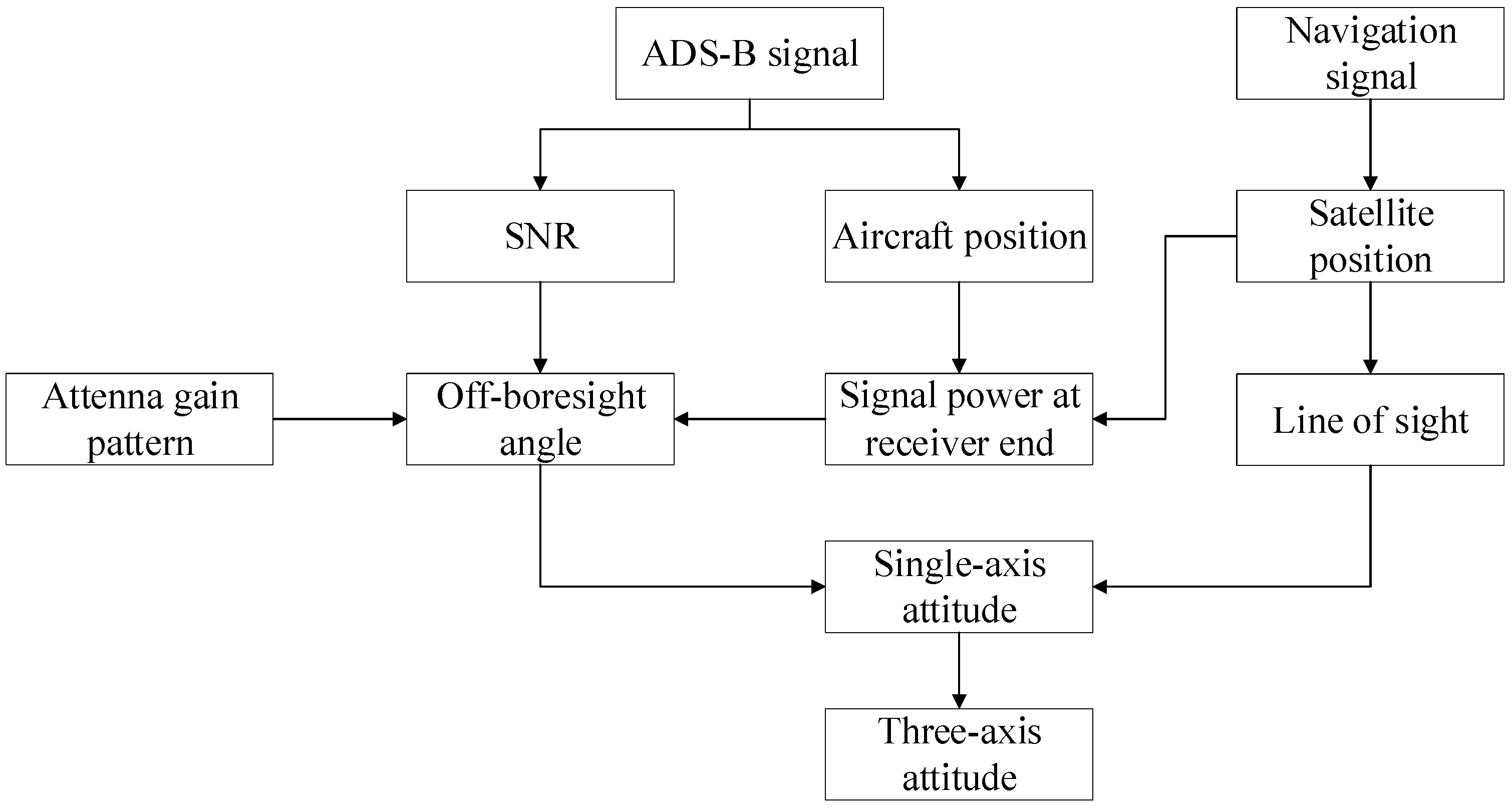
The basic principle of three-axis attitude determination using an ADS-B receiver is summarized in
Figure 2. On the one hand, the SNR of the ADS-B signal can be measured. On the other hand, the aircraft identity and position can be decoded from the signal. Then, the off-boresight angle of the signal can be derived from the known calibrated antenna gain pattern. Once off-boresight angles of two or more aircraft are estimated, the antenna boresight vector or the satellite’s single-axis attitude can be obtained. If two or more noncollinear antennas or a multibeam antenna is mounted on the satellite, a complete three-axis attitude determination of the satellite will be viable. It should be noted that the principle of
Figure 2 does not mean a completely identical implementation procedure of three-axis attitude determination. As will be shown in the following section, the step of single-axis attitude determination can be entirely skipped.
3. ADS-B-Based Attitude Determination Algorithm
3.1. Attitude Determination Model
The SNR of ADS-B signals is defined as follows:
where
and
are the signal power and noise power. The noise power is given by [
26]:
where
is the Boltzmann constant (1.381 × 10
−23 J/K),
B is the measurement bandwidth and
T is the effective noise temperature. The signal power is given by the following:
where
α is the off-boresight angle, namely, the angle between the boresight vector and the LOS vector from the satellite to aircraft,
is the mapping function of the antenna gain pattern and
is the isotropic signal power level at the receiver position.
Principal sources of error of the above observation system include the following: (1) the calculation error of
due to estimation errors of the transmitting power and path losses; (2) the modeling error of
due to a calibration error of the antenna gain pattern; and (3) the SNR measurement error induced by the receiver itself. The observation equation considering errors is given as follows:
where
is the measured value of the SNR and
is the total observation error, assumed to be white Gaussian noise in this study. It is noted that
α is the only unknown variable in Equation (4).
As it is defined,
α is related to the boresight vector and the LOS vector by the following:
with
b being the boresight vector and
l being the LOS vector.
b and
l are unit vectors. By expressing Equation (5) in the satellite’s body frame, we have the following:
where the subscript ‘
B’ denotes the body frame,
and
are coordinates of
l and
b in the body frame and the superscript ‘
T’ denotes the transpose operator.
To determine the attitude of a satellite with the measured value of the SNR,
should be expressed as the function of the attitude explicitly. Thus,
needs to be expressed by the attitude. For a satellite, the attitude is defined as being between the body frame and orbit frame. Equation (6) can be further reformulated as follows:
where subscript
denotes the orbit frame.
is the satellite attitude matrix which needs to be solved. In general,
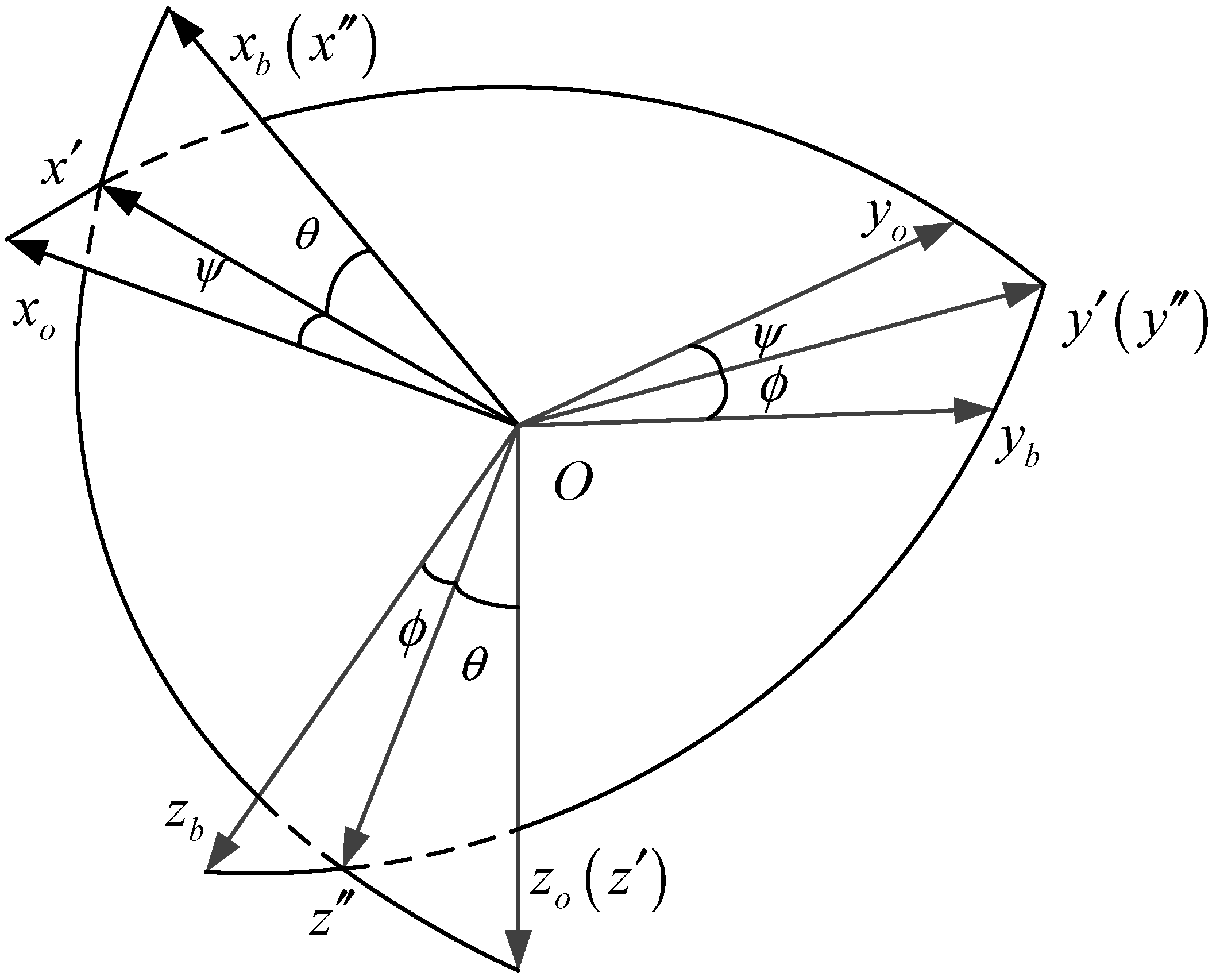
can be expressed by three Euler angles. For a 3-2-1 rotation, as is shown in
Figure 3, the relationship between the attitude matrix and Euler angle is given by the following:
where
,
and
are the yaw, pitch and roll angles, respectively.
is the unit line of the sight vector expressed in the orbit coordinate frame; it can be calculated by the following:
where
and
denote the satellite position and aircraft position expressed in the orbit frame of the satellite, respectively.
is the unit boresight vector expressed in the satellite body frame. It is determined by the antenna mounting position.
By substituting these equations into Equation (1), it is possible to relate the SNR measurement value
and satellite attitude
:
where
From the signals received from different aircraft,
,
and
are known; the SNR measurement only is a function of the satellite attitude
and aircraft position
. Meanwhile,
can be expressed by three Euler angles,
,
and
, in order to avoid orthogonality for the attitude matrix. Above all, the observation equation can be written as follows:
where
In order to keep the notation as compact as possible, let
denote the aircraft position
; then, the observation equation can be rewritten as follows:
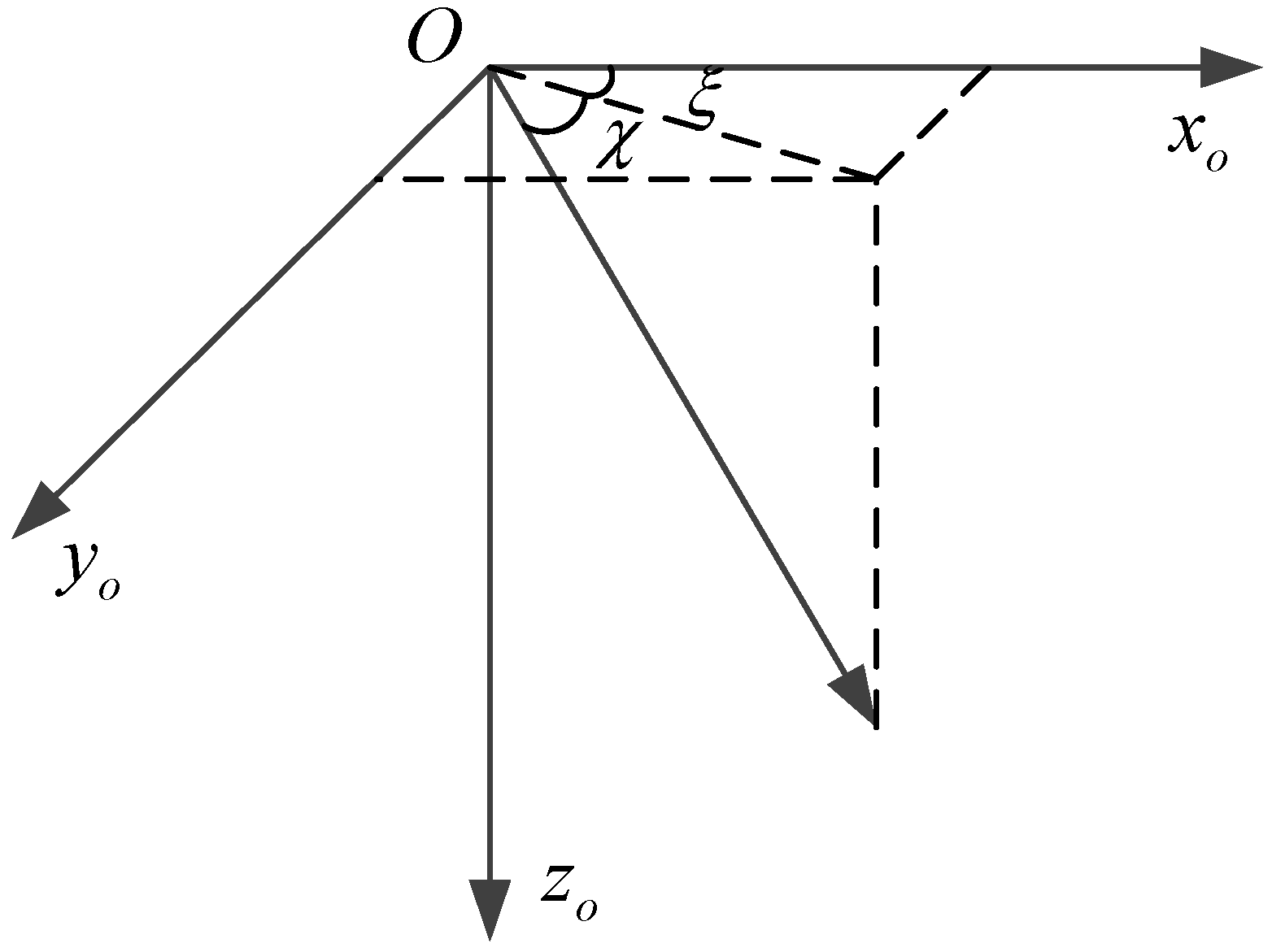
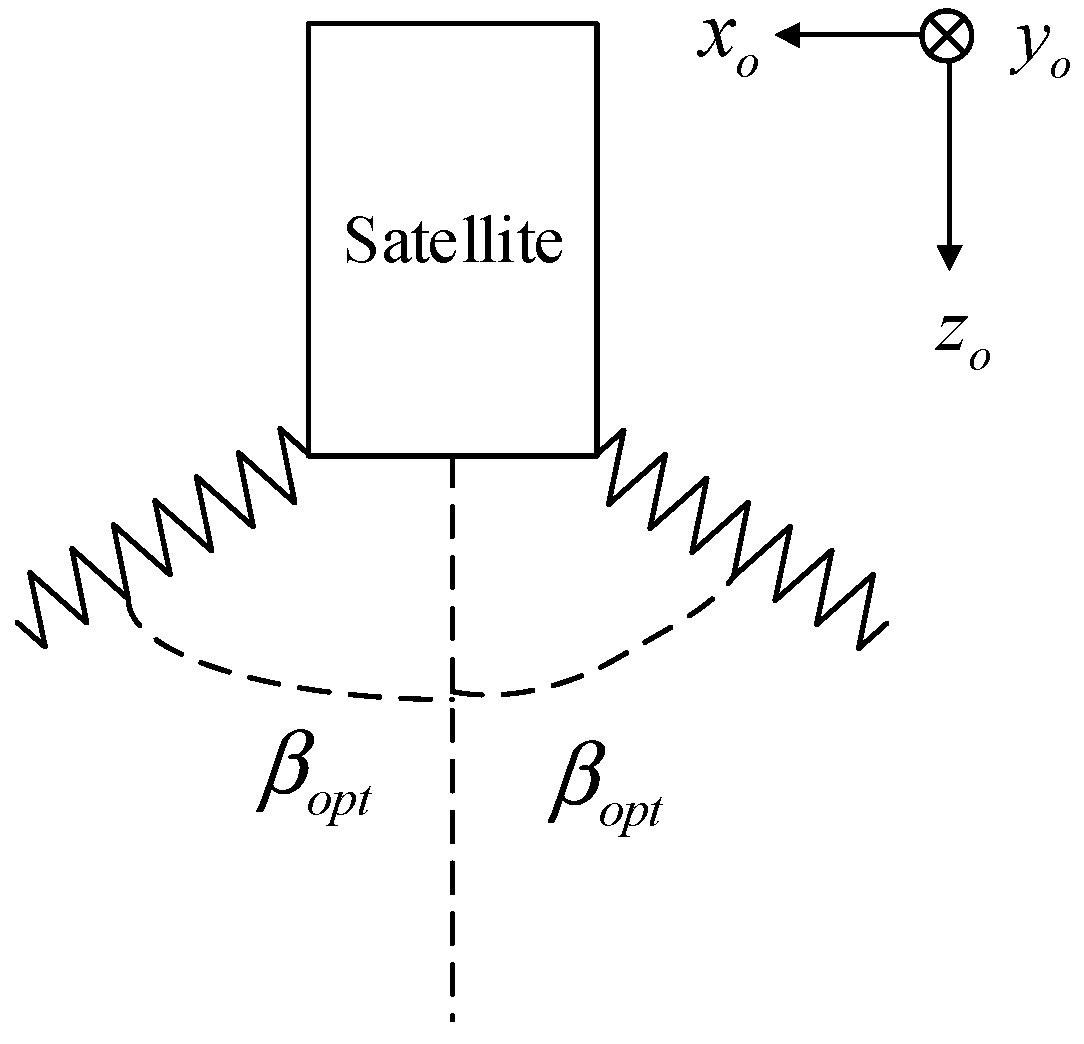
As is discussed in the previous section, rotations on the boresight orientation are unavailable because of the symmetry of the antenna gain pattern. The single-axis attitude is estimated when one antenna is mounted on the spacecraft. Equation (14) can be rewritten as follows:
where
and
are the azimuth angle and elevation angle of the boresight vector expressed in the orbit frame, as is shown in
Figure 4. This case has been discussed by Kaixing Zhou and Xiucong Sun et al. For more details, see [
16].
3.2. Attitude Determination by Deterministic Method
In this section, we will discuss how to estimate satellite three-axis attitude using two or more ADS-B antennas. A class of solution for this problem is known as the deterministic method. They can estimate satellite attitude directly using two or more observation vectors.
The basic idea for the deterministic method can be expressed by the following:
where
and
denote the
i-th boresight vector expressed in the body frame and orbit frame, respectively, and
is the corresponding error. In Equation (16),
is a set of observation vectors, which contain the information on the attitude. Wahba [
27] described the problem of finding the attitude matrix as the orthogonal matrix that minimizes the loss function; this question is known as Wahba’s Problem:
where
denotes the
i-th non-negative weight.
Achievements have been made by researchers in recent years. A lot of algorithms have been proposed to solve the question, for example, the three-axis attitude determination algorithm (TRIAD) [
28], Davenport’s q method [
29], the Quaternion estimator (QUEST) [
30], the Singular Value Decomposition method (SVD) [
31], the Fast optimal attitude matrix (FOAM) [
32] and so on. Among them, QUEST is the most commonly used attitude determination algorithm due to its higher precision and faster operational speed relative to the other methods. For more detail about QUEST, see [
30].
Above all, the process of ADS-B-based three-axis attitude determination using a deterministic method can be divided into two steps:
- 1.
Estimating a set of observation vectors . The former can be obtained by the antenna mounting position direction, while the latter can be determined by Equation (15).
- 2.
Determining the satellite attitude using the QUEST algorithm.
3.3. Attitude Determination by Nonlinear Least Squares Estimation (NLSE)
ADS-B-based three-axis attitude determination using a deterministic method has been discussed in the previous section. However, the method might lead to a larger error, because the estimation process is divided into two steps with an estimation error. Therefore, it is necessary to estimate the satellite three-axis attitude in one step for a more precise attitude determination.
Assuming that there are
antennas deployed on the satellite, and letting
be the number of available aircraft for the
i-th antenna, for the
i-th antenna, the measured value of the SNR related to the
j-th
aircraft is given as follows:
where
denotes the position of the
j-th available aircraft, and
and
denote the values of Equations (13) and (11) for the
i-th antenna and
j-th aircraft, respectively.
Since
is a nonlinear function, the satellite three-axis attitude determination is virtually a nonlinear least squares (NLS) problem. The objective function for this problem is as follows:
where
.
Satellite three-axis attitude determination is equivalent to the following minimization problem:
where
denotes the point
at which
achieves the minimum value.
There have been a lot of studies for the nonlinear least squares problem [
33,
34,
35]. The most commonly employed nonlinear least squares estimation method is the numerical iteration method, including the levenberg–marquardt algorithm (LMA or LM) [
33], the Gauss–Newton algorithm [
34] and the gradient descent algorithm [
35].
The Gauss–Newton algorithm has a fast convergence, but it needs to calculate the Jacobian matrix of the objective function, and also requires the matrix to be positively determined. When the matrix is almost singular, the algorithm will produce an ill-fitting phenomenon. Although the gradient descent algorithm has a global convergence, it converges too slowly.
The levenberg–marquardt algorithm, also known as the damped least-squares (DLS) method, is proposed to overcome the issue that the iterative matrix is ill-conditioned in the Gauss–Newton algorithm. The levenberg–marquardt algorithm interpolates between the Gauss–Newton algorithm and the method of gradient descent. The levenberg–marquardt algorithm is more robust than the Gauss–Newton algorithm, which means that it finds a solution even if it starts very far off the final minimum in many cases.
The key for the levenberg–marquardt algorithm is solving the following equation:
where
is the Jacobian matrix,
is the damping factor,
is the identity matrix and
is the increment for the initial estimated parameter value
.
and
are stacked vectors of
and
, respectively.
The damping factor is non-negative and is adjusted at each iteration. If the reduction of is rapid, a smaller value can be used, bringing the algorithm closer to the Gauss–Newton algorithm, whereas if an iteration gives insufficient reduction in the residual, can be increased, moving a step closer to the gradient-descent direction. If either the length of the calculated step or the reduction of the objective function fall below predefined limits, iteration stops and the last parameter vector is considered to be the solution.
The variance–covariance matrix for the attitude estimation error can be obtained by Equation (22):
where
, and
is the standard deviation of the corresponding SNR measurement
.
6. Conclusions
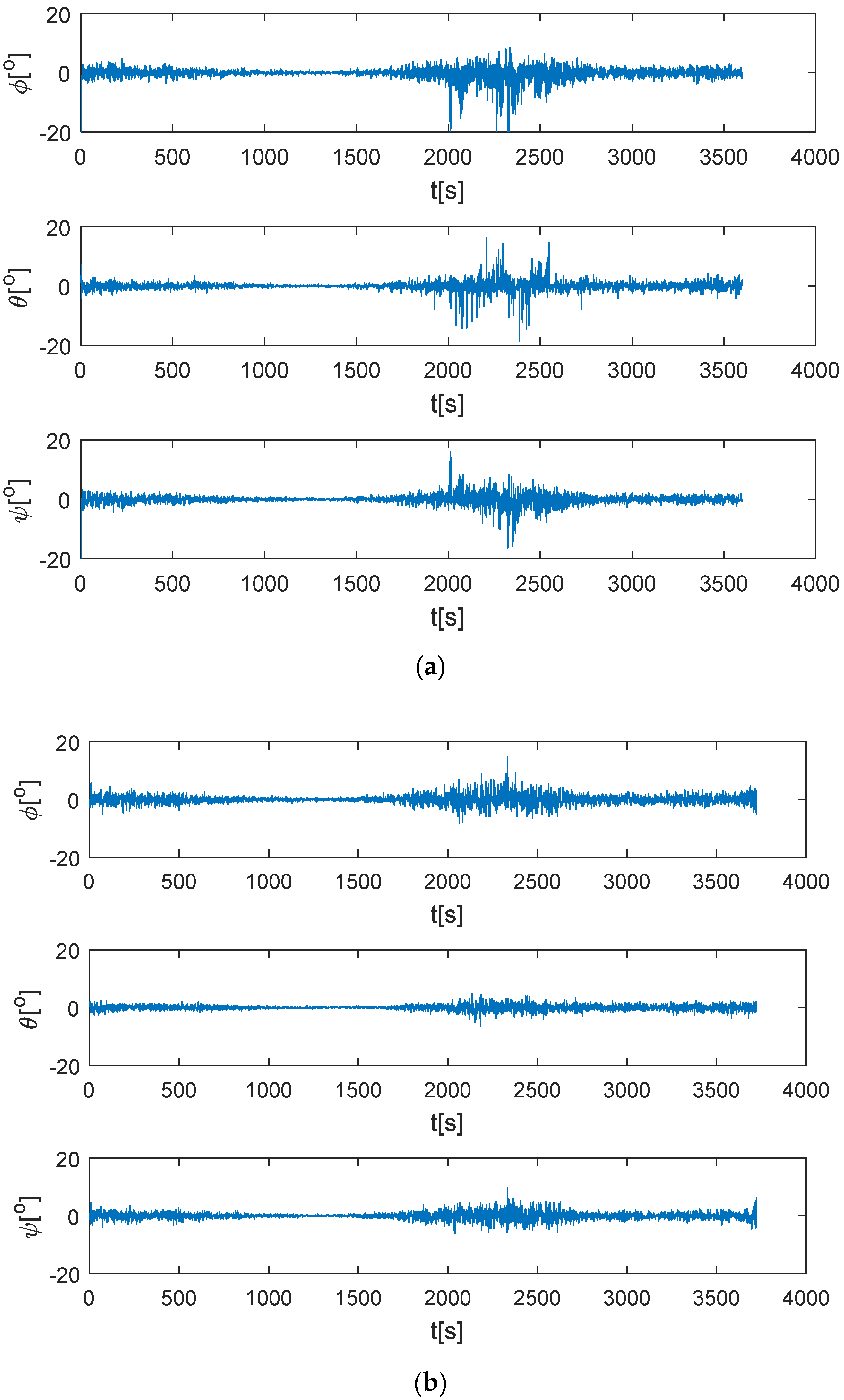
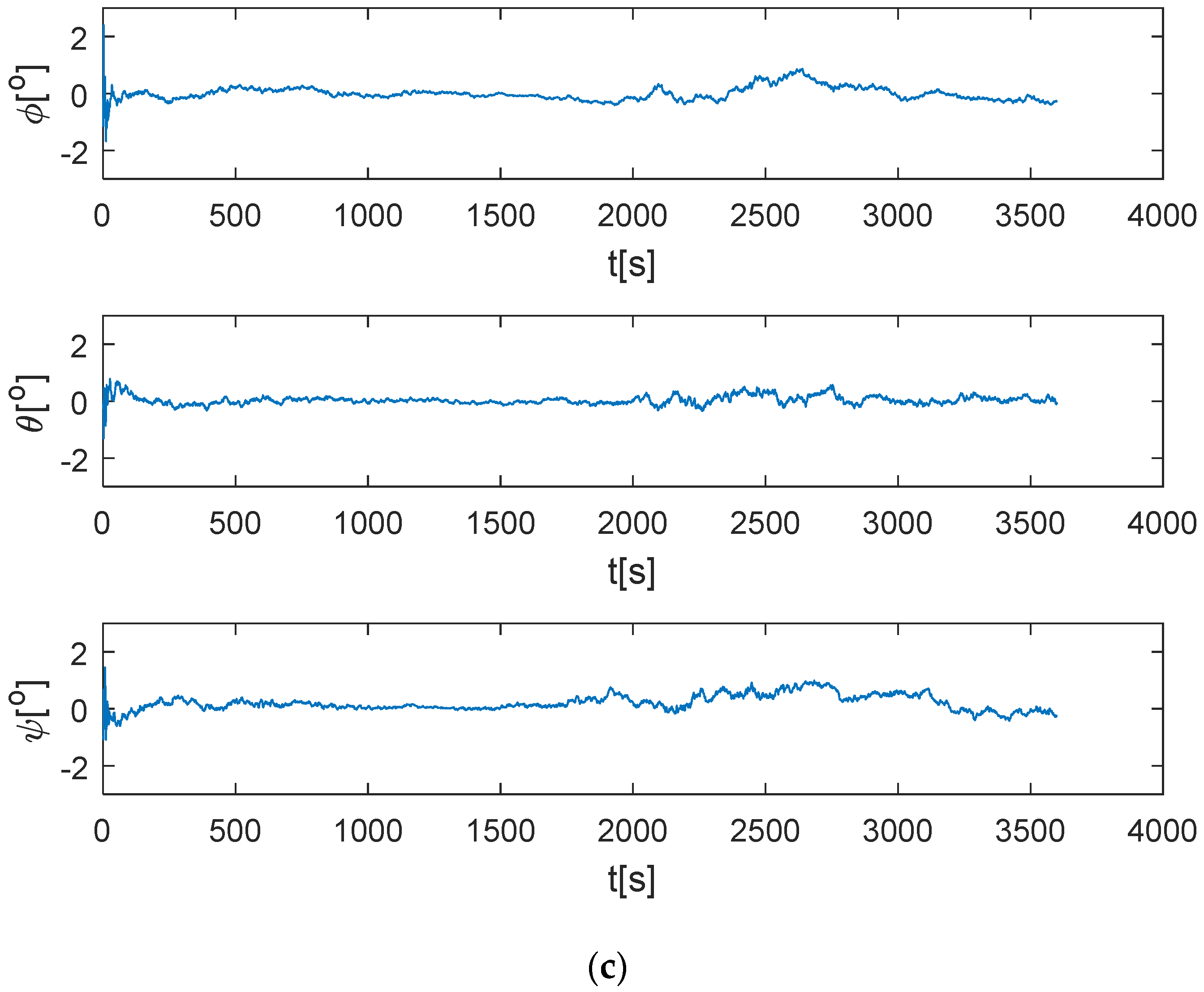
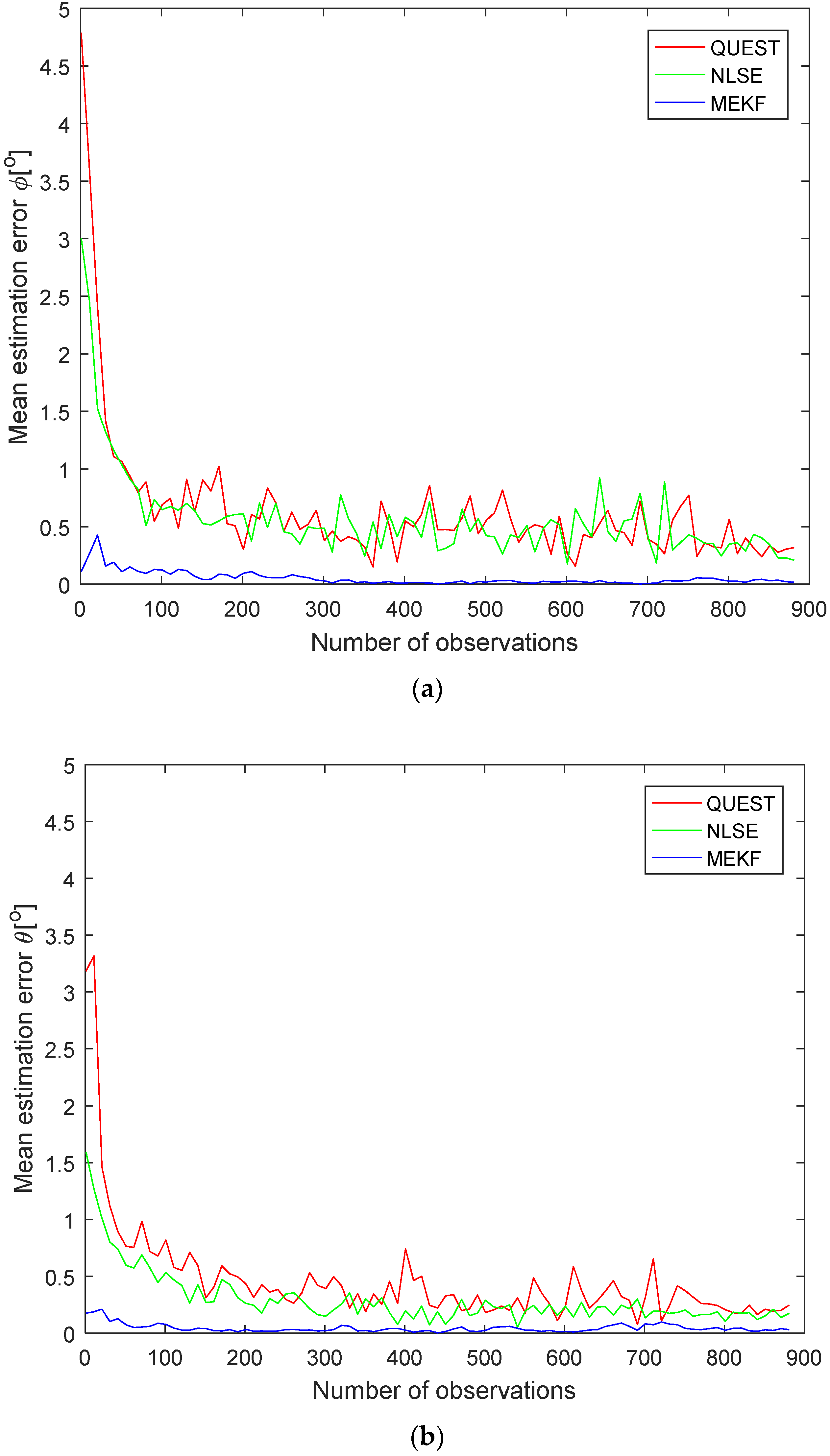
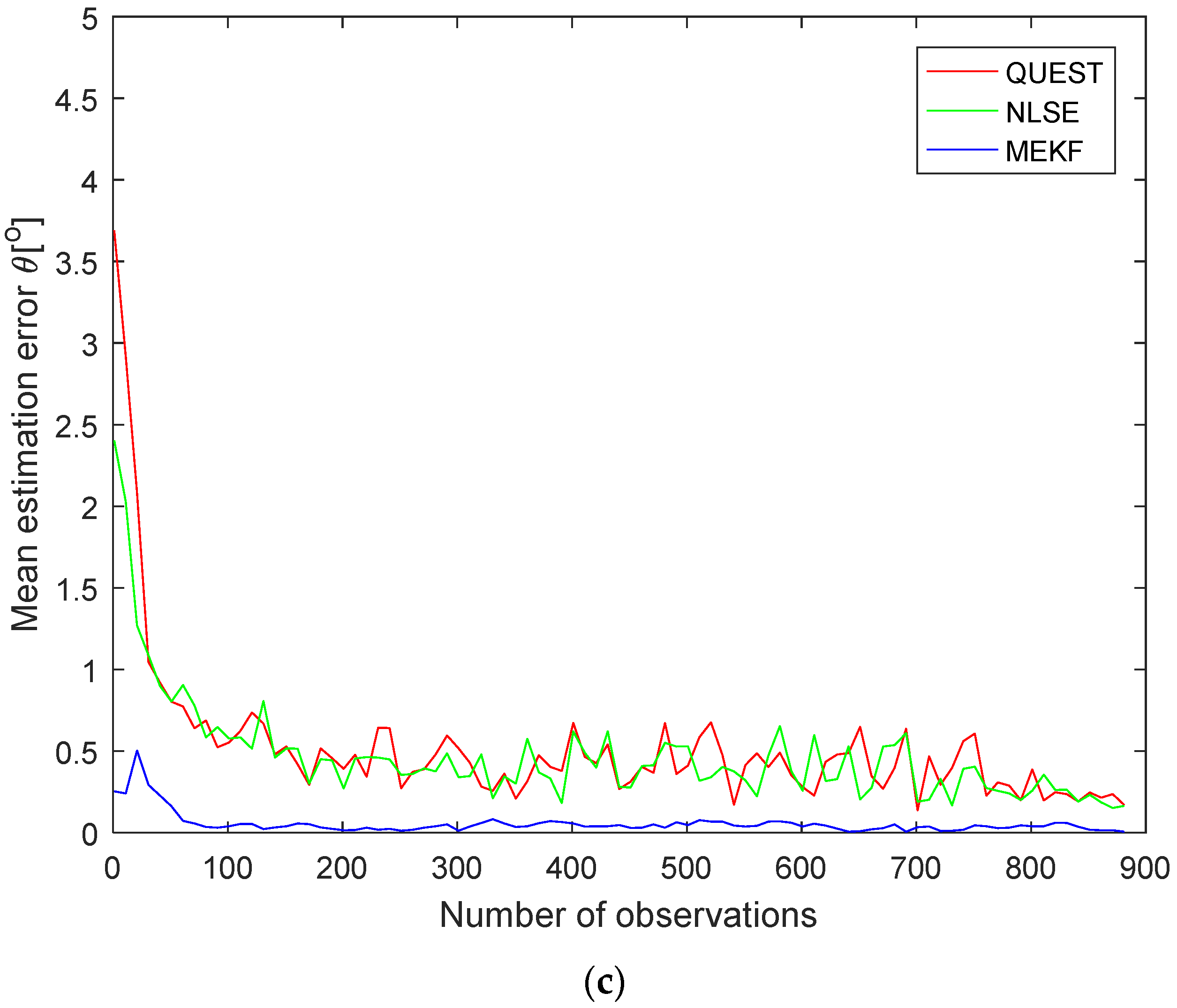
In this contribution, the ADS-B-based satellite three-axis attitude determination was discussed. The principle of ADS-B-based attitude determination was presented first. Then, three methods were employed to solve the problem, including the deterministic method, NLSE method and MEKF method. Finally, a simulation was carried out to verify these algorithms. Based on the simulation results, it can be concluded that the ADS-B-based satellite three-axis attitude determination is available. Estimation accuracy at the degree level is possible using the NLSE method and QUEST method; they only need two ADS-B antennas. Moreover, the estimation accuracy will become higher using MEKF if a gyro is added.
Our future work will modify the MEKF method to achieve higher attitude estimation accuracy. A preliminary ideal is reformulating the observation model in MEKF and choosing the SNR measurement as the observation directly, rather than the Euler angle estimated by NLSE method. This may eliminate the error caused by the NLSE method.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}