
Studies of Satellite Position Measurements of LEO CubeSat to Identify the Motion Mode Relative to Its Center of Mass


Abstract
:Highlights
- Study of LEO CubeSat dynamics using satellite position measurements.
- Refinement of ballistic coefficient using satellite position measurements of close-flying CubeSats.
Abstract
1. Introduction
2. Problem Formulation
3. Data and Methods
- -
- ψ (precession angle) is a signed angle between the OY axis and the OX × Ox unit vector;
- -
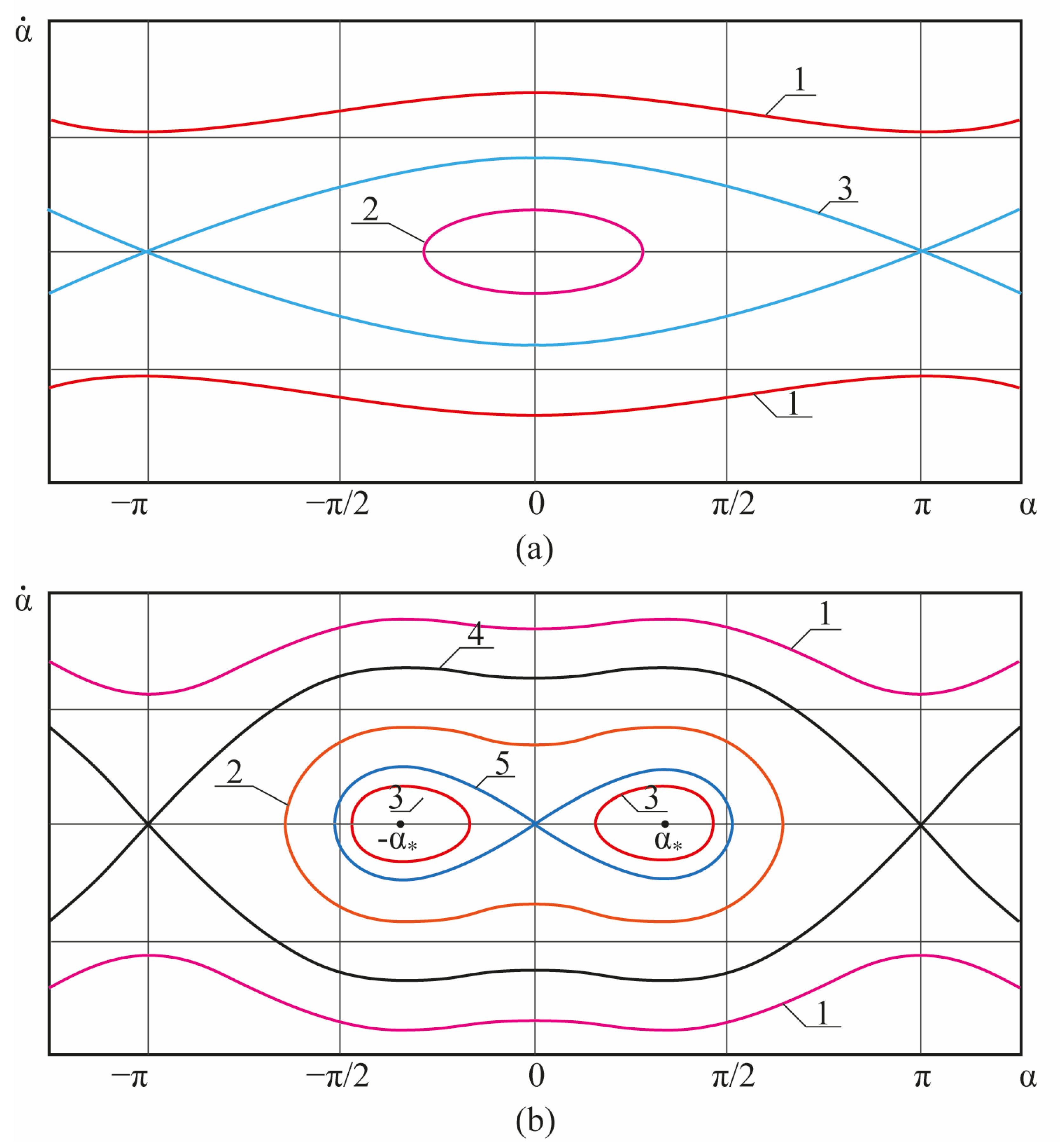
- α (angle of attack) is the angle between the longitudinal axis Ox and the velocity vector (OX axis for a circular orbit); and
- -
- φ (proper rotation angle) is a signed angle between the OX × Ox unit vector and the Oy axis.
4. Method for Identification of the CubeSat Motion Mode Relative to the Mass Center
5. Calculation
5.1. The First Launch from Vostochny
5.2. Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| TLE | Two-Line Element set; |
| SGP4 | Simplified Perturbations Model; |
| RK4 | classic Runge–Kutta method; |
| LEO | Low Earth Orbit. |
References
- Guo, J.; Pang, W.J.; Bo, B.; Meng, X.; Yu, X.; Zhou, J. Boom of the CubeSat: A statistic survey of Cubsats launch in 2003–2015. In Proceedings of the 67th International Astronautical Congress IAC-16-E2.4.5, Guadalajara, Mexico, 30 September 2016. [Google Scholar]
- Bryce Tech. Smallsats by the Numbers 2021. 2021. Available online: https://brycetech.com/reports/report-documents/Bryce_Smallsats_2021.pdf (accessed on 26 January 2022).
- Ariane 6. 2019. Available online: https://www.esa.int/Enabling_Support/Space_Transportation/Launch_vehicles/Ariane_6 (accessed on 26 January 2022).
- Rideshare Service for Light Satellites to Launch on Vega. 2020. Available online: https://www.esa.int/Enabling_Support/Space_Transportation/Rideshare_service_for_light_satellites_to_launch_on_Vega (accessed on 26 January 2022).
- JAXA Signs an Agreement with an Enterprise for Piggyback Launch Opportunities for Small Satellites. 2019. Available online: https://global.jaxa.jp/press/2019/12/20191204b.html (accessed on 26 January 2022).
- Mann, A. Rocket Lab: Private Spaceflight for Tiny Satellites. 2021. Available online: https://www.space.com/rocket-lab.html (accessed on 26 January 2022).
- Bouwmeester, J.; Guo, J. Survey of worldwide pico- and nanosatellite missions, distributions and subsystem technology. Acta Astronaut. 2010, 67, 854–862. [Google Scholar] [CrossRef]
- Swartwout, M. The First One Hundred CubeSats: A Statistical Look. J. Small Satell. 2013, 2, 213–233. Available online: https://jossonline.com/wp-content/uploads/2014/12/0202-The-First-One-Hundred-Cubesats.pdf (accessed on 26 January 2022).
- Swartwout, M. CubeSats and Mission Success: 2017 Update. In Proceedings of the 2016 Electronics Technology Workshop, Greenbelt, MD, USA, 26–29 June 2017; Saint Louis University: St. Louis, MO, USA, 2017. Available online: https://nepp.nasa.gov/workshops/etw2017/talks/28-JUN-WED/0900%20-%20swartwout%20etw%202017.pdf (accessed on 26 January 2022).
- Venturi, C.; Tolmasoff, M. Improving Mission Success of CubeSats; Aerospace Report; No. TOR-2017-01689; Aerospace Corporation: El Segundo, CA, USA, 2017; Available online: https://aerospace.org/sites/default/files/2018-07/TOR-2017-01689%20-%20Improving%20Mission%20Success%20of%20CubeSats.pdf (accessed on 26 January 2022).
- NORAD Two-Line Element Sets Current Data. Available online: https://celestrak.com/NORAD/elements/ (accessed on 26 January 2022).
- Kulu, E. Nanosats Database. Available online: https://www.nanosats.eu/ (accessed on 26 January 2022).
- Belokonov, I.V.; Timbai, I.A.; Barinova, E.V. Design Parameters Selection for CubeSat Nanosatellite with a Passive Stabilization System. Gyroscopy Navig. 2020, 11, 149–161. [Google Scholar] [CrossRef]
- Riano-Rios, C.; Sun, R.; Bevilacqua, R.; Dixon, W.E. Aerodynamic and gravity gradient based attitude control for CubeSats in the presence of environmental and spacecraft uncertainties. Acta Astronaut. 2021, 180, 439–450. [Google Scholar] [CrossRef]
- Schrello, D.M.; Davidson, P.H.; Juelich, O.C. Passive Aerodynamic Attitude Stabilization of Near-Earth Satellites, Volume I. Librations Due to Combined Aerodynamic and Gravitational Torques; WADD Technical Report 61-133; Aeronautical Systems Division, Air Force Systems Command, US Air Force, Wright-Patterson Air Force Base: Dayton, OH, USA, 1961. [Google Scholar]
- Belokonov, I.V.; Timbai, I.A.; Nikolaev, P.N. Analysis and Synthesis of Motion of Aerodynamically Stabilized Nanosatellites of the CubeSat Design. Gyroscopy Navig. 2018, 9, 287–300. [Google Scholar] [CrossRef]
- Belokonov, I.V.; Timbai, I.A.; Nikolaev, P.N. Approach for Estimation of Nanosatellite’s Motion Concerning of Mass Centre by Trajectory Measurements (IAA-B12-0703). In Proceedings of the 12th Symposium on Small Satellites for Earth Observation, Berlin, Germany, 6–10 May 2019; Sandau, R., Brieß, K., Gill, E., Eds.; IAA Book Series. International Academy of Astronautics: Paris, France, 2020; Volume 2, pp. 210–217. Available online: https://iaaspace.org/wp-content/uploads/iaa/Scientific%20Activity/conf/sseo2021/berlin2019proceedings.pdf (accessed on 26 January 2022).
- Vallado, D.A.; Finkleman, D. A critical assessment of satellite drag and atmospheric density modelling. Acta Astronaut. 2014, 95, 141–165. [Google Scholar] [CrossRef]
- Jacchia, L. Atmospheric Models in the Region from 110 to 2000 km. In CIRA 1972: COSPAR International Reference Atmosphere 1972; Akademie-Verlag: Berlin, Germany, 1972; pp. 227–338. [Google Scholar]
- Berger, C.; Biancale, R.; Barlier, F. Improvement of the empirical thermospheric model DTM: DTM-94—A comparative review of various temporal variations and prospects in space geodesy applications. J. Geod. 1998, 72, 161–178. [Google Scholar] [CrossRef]
- Bruinsma, S.; Thuillier, G.; Barlier, F. The DTM-2000 empirical thermosphere model with new data assimilation and constraints at lower boundary: Accuracy and properties. J. Atmos. Sol. Terr. Phys. 2003, 65, 1053–1070. [Google Scholar] [CrossRef]
- Hedin, A.E. MSIS-86 thermospheric model. J. Geophys. Res. 1987, 92, 4649–4662. [Google Scholar] [CrossRef]
- Hedin, A. Extension of the MSIS thermospheric model into the middle and lower atmosphere. J. Geophys. Res. 1991, 96, 1159–1172. [Google Scholar] [CrossRef]
- Picone, J.; Hedin, A.; Drob, D.; Aikin, A. NRLMSISE-00 empirical model of the atmosphere: Statistical comparisons and scientific issues. J. Geophys. Res. 2002, 107, SIA 15-1–SIA 15-16. [Google Scholar] [CrossRef]
- Marcos, F.A.; Bowman, B.R.; Sheehan, R.E. Accuracy of Earth’s thermospheric neutral density models. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, Keystone, CO, USA, 21–26 August 2006. [Google Scholar] [CrossRef]
- Krebs Gunter, D. “Pion”. Gunter’s Space Page. Available online: https://space.skyrocket.de/doc_sdat/pion.htm (accessed on 26 January 2022).
- Nicholas, A.C.; Gilbreath, G.C.; Thonnard, S.E.; Kessel, R.A.; Lucke, R.; Sillman, C.P. The Atmospheric Neutral Density Experiment (ANDE) and Modulating Retroreflector in Space (MODRAS): Combined flight experiments for the space test program. In Proceedings of the Optics in Atmospheric Propagation and Adaptive Systems V, Crete, Greece, 20 March 2003; Volume 4884. [Google Scholar] [CrossRef]
- Pilinski, M.D.; Palo, S.E. An Innovative Method for Measuring Drag on Small Satellites. In Proceedings of the 23th Annual AAIA/USU Conference on Small Satellite, Logan, UT, USA, 10–13 August 2009; Available online: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1311&context=smallsat (accessed on 26 January 2022).
- Pilinski, M.D. Analysis of a Novel Approach for Determining Atmospheric Density from Satellite Drag. Master’s Thesis, University of Colorado, Boulder, CO, USA, 2008. [Google Scholar]
- Nicholas, A.; Finne, T.; Galysh, J. SpinSat mission overview. In Proceedings of the 27th Annual AAIA/USU Conference on Small Satellite, Logan, UT, USA, 19–22 September 2013. [Google Scholar]
- Zhao, Z.; Wang, Z.; Zhang, Y. A Spherical Micro Satellite Design and Detection Method for Upper Atmospheric Density Estimation. Int. J. Aerosp. Eng. 2019, 2019, 1758956. [Google Scholar] [CrossRef]
- Thoemel, J.; Singarayar, F.; Scholz, T.; Masutti, D. Status of the QB50 cubesat constellation mission. In Proceedings of the 65th International Astronautical Congress, Toronto, ON, Canada, 21 January 2014. [Google Scholar]
- Belokonov, I.V.; Ivanov, D.S.; Ovchinnikov, M.Y.; Pen’kov, V.I. Passive System for the Angular Damping of the SAMSAT-QB50 Nanosattelite. J. Comput. Syst. Sci. Int. 2019, 58, 774–785. [Google Scholar] [CrossRef]
- Nier, A.O.; Potter, W.E.; Hickman, D.R.; Mauersberger, K. The open-source neutral-mass spectrometer on Atmosphere Explorer-C, -D, and -E. Radio Sci. 1973, 8, 271–276. [Google Scholar] [CrossRef]
- Hoffman, J.H.; Hanson, W.B.; Lippincott, C.R.; Ferguson, E.E. The magnetic ion-mass spectrometer on Atmosphere Explorer. Radio Sci. 1973, 8, 315–322. [Google Scholar] [CrossRef]
- Niemann, H.B. An atomic oxygen beam system for the investigation of mass spectrometer response in the upper atmosphere. Rev. Sci. Instrum. 1972, 43, 1151–1161. [Google Scholar] [CrossRef]
- Emmert, J.T. Thermospheric mass density: A review. Adv. Space Res. 2015, 56, 773–824. [Google Scholar] [CrossRef]
- Champion, K.S.W.; Marcos, F.A. The triaxial-accelerometer system on atmosphere explorer. Radio Sci. 1973, 8, 297–303. [Google Scholar] [CrossRef]
- Doornbos, E. Thermospheric Density and Wind Determination from Satellite Dynamics. Ph.D. Dissertation, University of Delft, Delft, The Netherlands, 2011. [Google Scholar]
- Vallado, D.A.; Crawford, P. SGP4 orbit determination. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar] [CrossRef]
- Shi, C.; Li, W.; Li, M.; Zhao, Q.; Sang, J. Calibrating the scale of the NRLMSISE00 model during solar maximum using the two line elements dataset. Adv. Space Res. 2015, 56, 1–9. [Google Scholar] [CrossRef]
- Krzysztof, S. Impact of the atmospheric drag on Starlette, Stella, Ajisai, and Lares Orbits. Artif. Satell. 2015, 50, 1–18. [Google Scholar] [CrossRef]
- Doornbos, E.; Klinkrad, H.; Visser, P. Use of two-line element data for thermosphere neutral density model calibration. Adv. Space Res. 2008, 41, 1115–1122. [Google Scholar] [CrossRef]
- Li, B.; Zhang, Y.; Huang, J.; Sang, J. Improved orbit predictions using two-line elements through error pattern mining and transferring. Acta Astronaut. 2021, 188, 405–415. [Google Scholar] [CrossRef]
- Lu, Z.; Hu, W. Estimation of ballistic coefficients of space debris using the ratios between different objects. Chin. J. Aeronaut. 2017, 30, 1204–1216. [Google Scholar] [CrossRef]
- Belokonov, I.V.; Timbai, I.A.; Nikolaev, P.N.; Orazbaeva, U.M. Analysis of SamSat-218D nanosatelite motion acording to trajectory measurements, Vestnik of Samara University. Aerosp. Mech. Eng. 2019, 18, 18–28. [Google Scholar] [CrossRef]
- Belokonov, I.V.; Timbai, I.A.; Nikolaev, P.N. Reconstruction of motion relative to the center of mass of a low-altitude nanosatellite from trajectory measurements. In Proceedings of the IAC 2021 Congress Proceedings, 72nd International Astronautical Congress (IAC), Dubai, United Arab Emirates, 25–29 October 2021. IAC-21-B4.3.8. [Google Scholar]
- Hoots, F.R.; Roehrich, R.L. Models for Propagation of NORAD Element Sets. Spacetrack Report NO. 3. 1980. Available online: http://www.celestrak.com/NORAD/documentation/spacetrk.pdf (accessed on 26 January 2022).
- Press, W.H. Numerical Recipes: The Art of Scientific Computing, 3rd ed.; Cambridge University Press: New York, NY, USA, 2007. [Google Scholar]
- Wahba, G. Spline Models for Observational Data. In CBMS-NSF Regional Conference Series in Applied Mathematics; University City Science Center: Philadelphia, PA, USA, 1990. [Google Scholar] [CrossRef]
- Belokonov, I.V.; Kramlikh, A.V.; Timbai, I.A. Low-orbital transformable nanosatellite: Research of the dynamics and possibilities of navigational and communication problems solving for passive aerodynamic stabilization. J. Adv. Astronaut. Sci. 2015, 153, 383–397, IAA-AAS-DyCoSS2-14-04-10. [Google Scholar]
- Barinova, E.V.; Belokonov, I.V.; Timbai, I.A. Preventing Resonant Motion Modes for Low-Altitude CubeSat Nanosatellites. Gyroscopy Navig. 2022, 12, 350–362. [Google Scholar] [CrossRef]
- Kirillin, A.; Belokonov, I.; Timbai, I.; Kramlikh, A.; Melnik, M.; Ustiugov, E.; Egorov, A.; Shafran, S. SSAU nanosatellite project for the navigation and control technologies demonstration. J. Procedia Eng. 2015, 104, 97–106. [Google Scholar] [CrossRef]
- Abrashkin, V.I.; Voronov, K.E.; Dorofeev, A.S.; Piyakov, A.V.; Puzin, Y.Y.; Sazonov, V.V.; Semkin, N.D.; Filippov, A.S.; Chebukov, S.Y. Detection of the Rotational Motion of the AIST-2D Small Spacecraft by Magnetic Measurements. Cosmic Res. 2019, 57, 48–60. [Google Scholar] [CrossRef]
- Sadovnichii, V.A.; Panasyuk, M.I.; Amelyushkin, A.M.; Bogomolov, V.V.; Benghin, V.V.; Garipov, G.K.; Kalegaev, V.V.; Klimov, P.A.; Khrenov, B.A.; Petrov, V.L. “Lomonosov” Satellite—Space Observatory to Study Extreme Phenomena in Space. Space Sci. Rev. 2017, 212, 1705–1738. [Google Scholar] [CrossRef]
- Fifth Anniversary of the First Launch from Vostochny. 2021. Available online: http://en.roscosmos.ru/22086/ (accessed on 26 January 2022).
- Soyuz 2-1v Launch Vehicle. Available online: https://spaceflight101.com/spacerockets/soyuz-2-1v (accessed on 26 January 2022).
- Progress Rocket Space Centre. Available online: https://www.samspace.ru (accessed on 26 January 2022).
- Innoter Geospatial Agency. AIST-2D. Available online: https://innoter.com/en/satellites/aist-2d/ (accessed on 26 January 2022).
- Wua, S.; Chen, W.; Cao, C.; Zhang, C.; Mu, Z. A multiple-CubeSat constellation for integrated earth observation and marine/air traffic monitoring. Adv. Space Res. 2021, 67, 3712–3724. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Regions of Influence | Altitude Range | Environmental Effects |
|---|---|---|
| Region I | Below 300 km | Aerodynamic torques dominate angular motions |
| Region II | From 300 to 650 km | Aerodynamic and gravitational torques are comparable |
| Region III | From 650 to 1000 km | Aerodynamic, gravitational, and solar torques are comparable |
| Region IV | Above 1000 km | Solar and gravitational torques dominate angular motions |
| Feature | SamSat-218D (3U CubeSat) | AIST 2D (Micro Satellite) |
|---|---|---|
| Maximum angular acceleration at 480 km altitude caused by aerodynamic torque, (s−2) | 1.8 × 10−6 | ~10−8 |
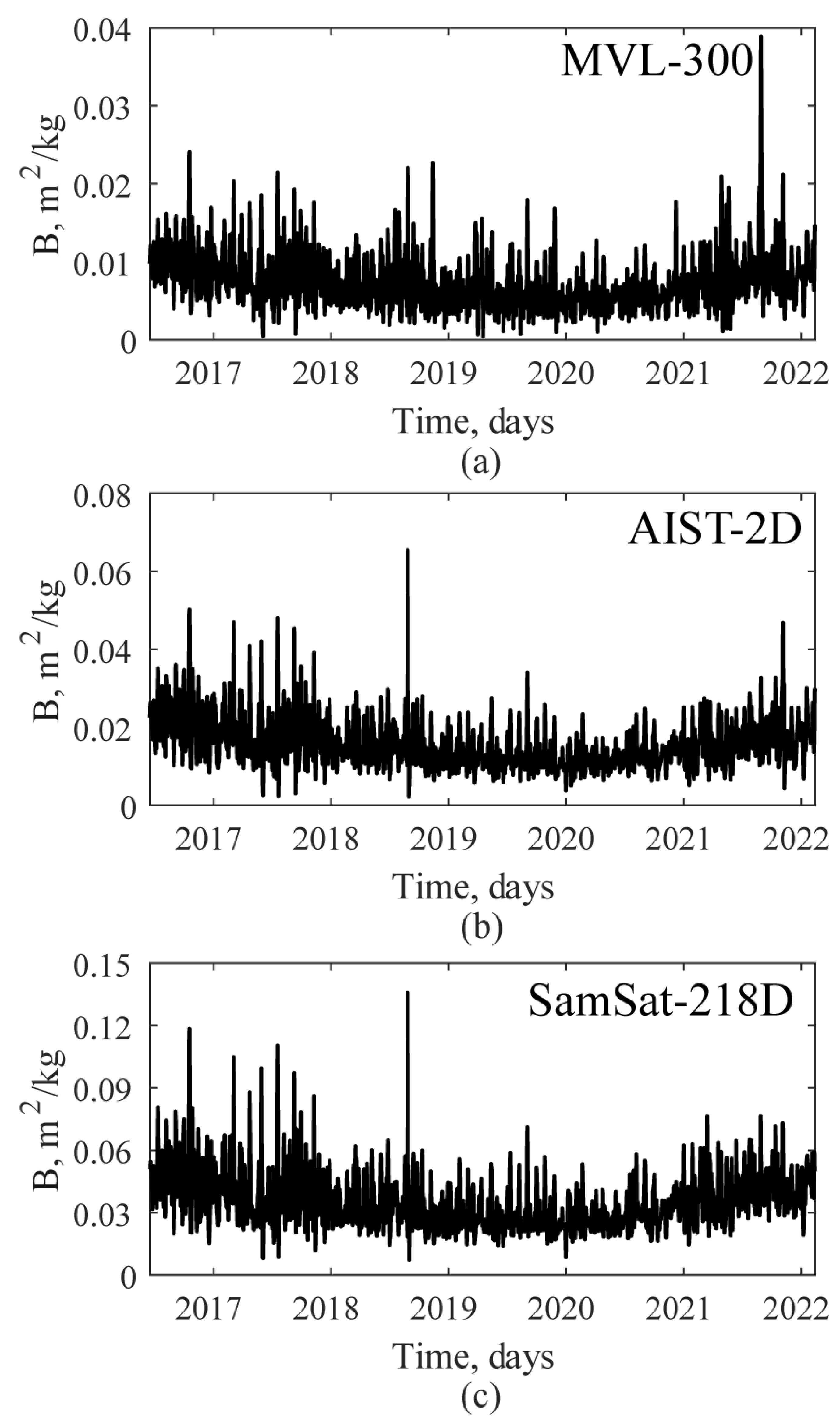
| Averaged ballistic coefficient, (m2/kg) | 0.048 | 0.0227 |
| Ratio of the maximum value of ballistic coefficient to the minimum one | 4.75 | ~1.73 |
| Parameter | Value |
|---|---|
| NORAD ID | 41,464 |
| Mass, kg | 625 |
| ADCS | triaxial |
| Parameter | Value |
|---|---|
| NORAD ID | 41,465 |
| Mass, kg | 531 |
| ADCS | Triaxial |
| B, m2/kg | 0.0227 |
| Parameter | Value |
|---|---|
| NORAD ID | 41,466 |
| Deployment angle, deg (initial angle of attack in orbital plane) | 80 (in orbital plane) |
| Deployment angular velocity, deg/s | Unspecified |
| Mass, kg | 1.82 |
| Main inertia moments, kg·m2 | 0.00402; 0.01422; 0.01454 |
| Static stability margin, m | 0.06 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belokonov, I.; Timbai, I.; Nikolaev, P. Studies of Satellite Position Measurements of LEO CubeSat to Identify the Motion Mode Relative to Its Center of Mass. Aerospace 2023, 10, 378. https://doi.org/10.3390/aerospace10040378
Belokonov I, Timbai I, Nikolaev P. Studies of Satellite Position Measurements of LEO CubeSat to Identify the Motion Mode Relative to Its Center of Mass. Aerospace. 2023; 10(4):378. https://doi.org/10.3390/aerospace10040378
Chicago/Turabian StyleBelokonov, Igor, Ivan Timbai, and Petr Nikolaev. 2023. "Studies of Satellite Position Measurements of LEO CubeSat to Identify the Motion Mode Relative to Its Center of Mass" Aerospace 10, no. 4: 378. https://doi.org/10.3390/aerospace10040378
APA StyleBelokonov, I., Timbai, I., & Nikolaev, P. (2023). Studies of Satellite Position Measurements of LEO CubeSat to Identify the Motion Mode Relative to Its Center of Mass. Aerospace, 10(4), 378. https://doi.org/10.3390/aerospace10040378