
On the Validity of the Normal Force Model for Steadily Revolving Wings: An Experimental Investigation



Abstract
:1. Introduction
1.1. Revolving Wing Experiments
1.2. Normal Force Model
2. Methods
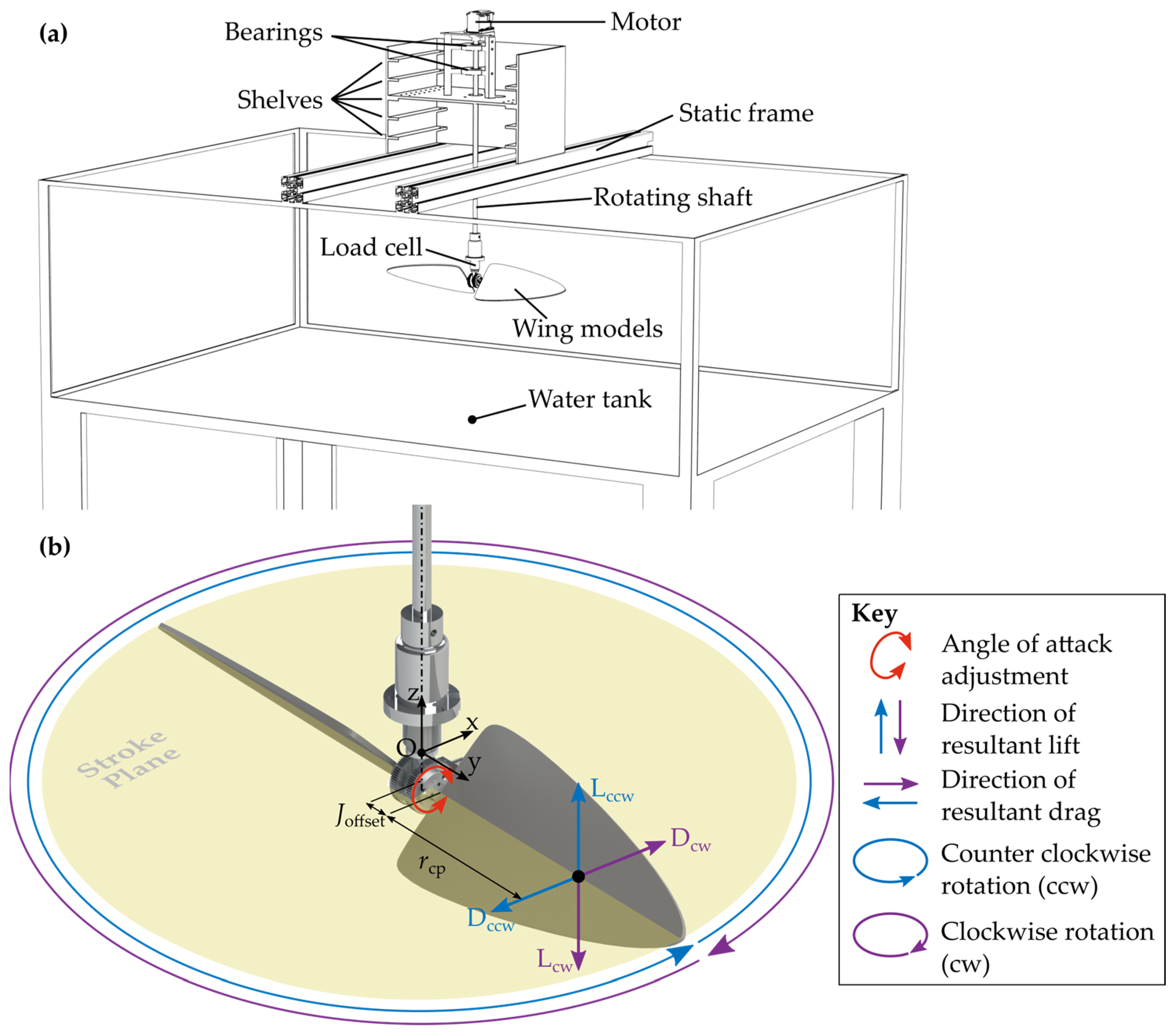
2.1. Experimental Setup
2.2. Data Acquisition
2.3. Extraction of Parameters for the Normal Force Model
3. Results
3.1. Planform Morphology Effect
3.2. Reynolds Number Effect
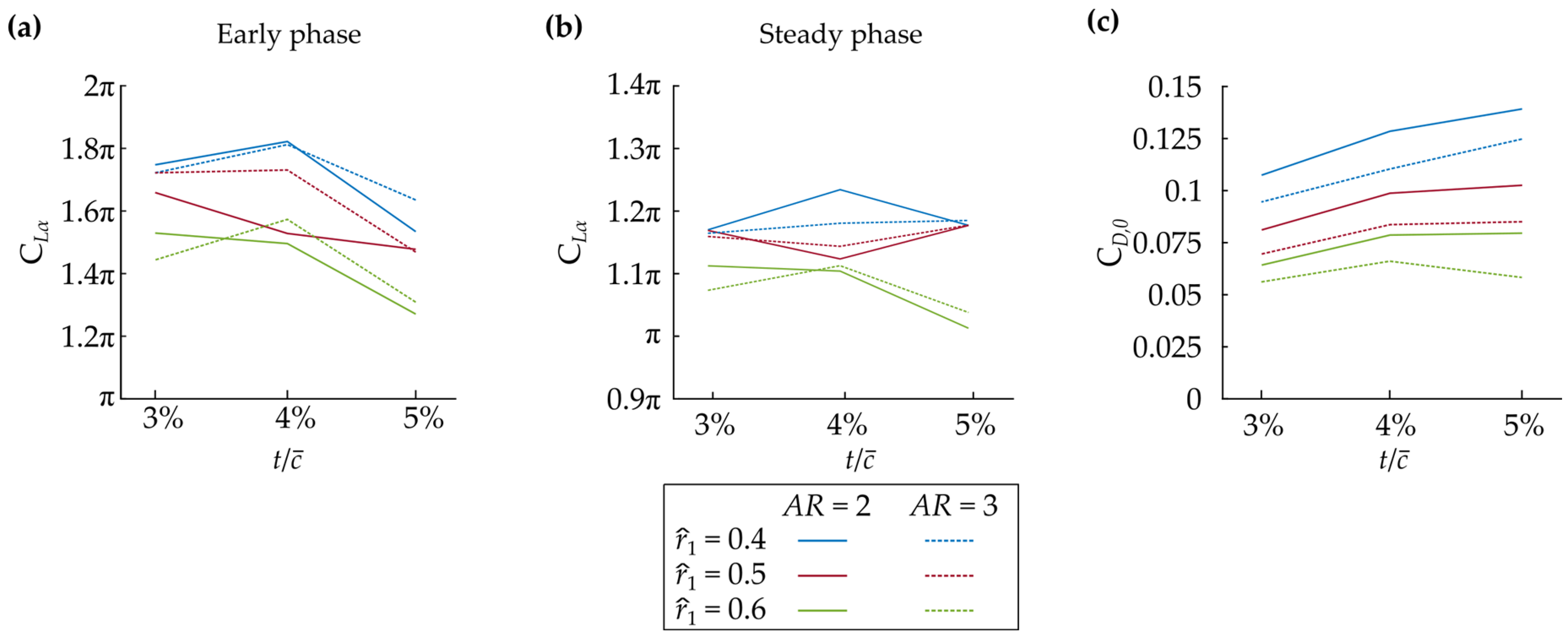
3.3. Thickness-to-Chord Ratio Effect
3.4. Relation between Lift and Drag Characteristics
4. Final Comments
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A


References
- Broadley, P.; Nabawy, M.R.A.; Quinn, M.K.; Crowther, W.J. Dynamic experimental rigs for investigation of insect wing aerodynamics. J. R. Soc. Interface 2022, 19, 20210909. [Google Scholar] [CrossRef] [PubMed]
- Dudley, R.; Ellington, C.P. Mechanics of forward flight in bumblebees: I. Kinematics and morphology. J. Exp. Biol. 1990, 148, 19–52. [Google Scholar] [CrossRef]
- Dudley, R.; Ellington, C.P. Mechanics of Forward Flight in Bumblebees: II. quasi-steady lift and power requirements. J. Exp. Biol. 1990, 148, 53–88. [Google Scholar] [CrossRef]
- Ellington, C.P.; Van Den Berg, C.; Willmott, A.P.; Thomas, A.L.R. Leading-edge vortices in insect flight. Nature 1996, 384, 626–630. [Google Scholar] [CrossRef]
- Van Den Berg, C.; Ellington, C.P. The three-dimensional leading-edge vortex of a “hovering” model hawkmoth. Philos. Trans. R. Soc. B Biol. Sci. 1997, 352, 329–340. [Google Scholar] [CrossRef]
- Dickinson, M.H.; Lehmann, F.-O.; Sane, S.P. Wing Rotation and the Aerodynamic Basis of Insect Flight. Science 1999, 284, 1954–1960. [Google Scholar] [CrossRef]
- Broadley, P.; Nabawy, M.R.; Quinn, M.K.; Crowther, W.J. Wing planform effects on the aerodynamic performance of insect-like revolving wings. In Proceedings of the AIAA AVIATION 2020 FORUM, Virtual Event, 15–19 June 2020; AIAA: Reston, VA, USA, 2020; pp. 1–11. [Google Scholar] [CrossRef]
- Broadley, P.; Nabawy, M.R. An experimental investigation of Reynolds number effects on the aerodynamics of insect-like revolving wings. In Proceedings of the AIAA SciTech Forum 2022, San Diego, CA, USA, 3-7 January 2022; AIAA: Reston, VA, USA, 2022; pp. 1–12. [Google Scholar] [CrossRef]
- Lee, Y.J.; Lua, K.B.; Lim, T.T. Aspect ratio effects on revolving wings with Rossby number consideration. Bioinspiration Biomim. 2016, 11, 056013. [Google Scholar] [CrossRef]
- Lehmann, F.-O. The mechanisms of lift enhancement in insect flight. Sci. Nat. 2004, 91, 101–122. [Google Scholar] [CrossRef]
- Willmott, A.P.; Ellington, C.P. The mechanics of flight in the hawkmoth Manduca sexta. II. Aerodynamic consequences of kinematic and morphological variation. J. Exp. Biol. 1997, 200, 2723–2745. [Google Scholar] [CrossRef]
- Phillips, N.; Knowles, K. Effect of flapping kinematics on the mean lift of an insect-like flapping wing. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2011, 225, 723–736. [Google Scholar] [CrossRef]
- Nabawy, M.R.A.; Crowther, W.J. On the quasi-steady aerodynamics of normal hovering flight part II: Model implementation and evaluation. J. R. Soc. Interface 2014, 11, 20131197. [Google Scholar] [CrossRef] [PubMed]
- Nabawy, M.R.A.; Crowther, W.J. The role of the leading edge vortex in lift augmentation of steadily revolving wings: A change in perspective. J. R. Soc. Interface 2017, 14, 20170159. [Google Scholar] [CrossRef] [PubMed]
- Usherwood, J.R.; Ellington, C.P. The aerodynamics of revolving wings I. Model hawkmoth wings. J. Exp. Biol. 2002, 205, 1547–1564. [Google Scholar] [CrossRef] [PubMed]
- Birch, J.M.; Dickinson, M.H. Spanwise flow and the attachment of the leading-edge vortex on insect wings. Nature 2001, 412, 729–733. [Google Scholar] [CrossRef]
- Thomas, A.L.R.; Taylor, G.K.; Srygley, R.B.; Nudds, R.L.; Bomphrey, R.J. Dragonfly flight: Free-flight and tethered flow visualizations reveal a diverse array of unsteady lift-generating mechanisms, controlled primarily via angle of attack. J. Exp. Biol. 2004, 207, 4299–4323. [Google Scholar] [CrossRef]
- Délery, J.M. Robert Legendre and Henri Werlé: Toward the Elucidation of Three-Dimensional Separation JeanMD´eleryToward the Elucidation of Three-Dimensional Separation. Ann. Rev. Fluid. Mech. 2001, 33, 129–154. [Google Scholar] [CrossRef]
- Lentink, D.; Dickinson, M.H. Rotational accelerations stabilize leading edge vortices on revolving fly wings. J. Exp. Biol. 2009, 212, 2705–2719. [Google Scholar] [CrossRef]
- Jardin, T.; Colonius, T. On the lift-optimal aspect ratio of a revolving wing at low Reynolds number. J. R. Soc. Interface 2018, 15, 20170933. [Google Scholar] [CrossRef]
- Jones, A.R.; Babinsky, H. Unsteady Lift Generation on Rotating Wings at Low Reynolds Numbers. J. Aircr. 2010, 47, 1013–1021. [Google Scholar] [CrossRef]
- Carr, Z.R.; Chen, C.; Ringuette, M.J. Vortex formation and forces of Low-Aspect-Ratio, Rotating Flat-Plate wings at low Reynolds number. In Proceedings of the 42nd AIAA Fluid Dynamics Conference and Exhibit 2012, New Orleans, LA, USA, 25–28 June 2012; AIAA: Reston, VA, USA, 2012; pp. 1–24. [Google Scholar] [CrossRef]
- Wang, Z.J. Dissecting insect flight. Artic. Annu. Rev. Fluid. Mech. 2005, 37, 183–210. [Google Scholar] [CrossRef]
- Sane, S.P.; Dickinson, M.H. The control of flight force by a flapping wing: Lift and drag production. J. Exp. Biol. 2001, 204, 2607–2626. [Google Scholar] [CrossRef] [PubMed]
- Videler, J.J.; Stamhuis, E.J.; E Povel, G.D. Leading-Edge Vortex Lifts Swifts. Science 2004, 306, 5703. [Google Scholar] [CrossRef] [PubMed]
- Kruyt, J.W.; van Heijst, G.F.; Altshuler, D.L.; Lentink, D. Power reduction and the radial limit of stall delay in revolving wings of different aspect ratio. J. R. Soc. Interface 2015, 12, 20150051. [Google Scholar] [CrossRef]
- Jardin, T. Coriolis effect and the attachment of the leading edge vortex. J. Fluid Mech. 2017, 820, 312–340. [Google Scholar] [CrossRef]
- Garmann, D.J.; Visbal, M.R. Dynamics of revolving wings for various aspect ratios. J. Fluid Mech. 2014, 748, 932–956. [Google Scholar] [CrossRef]
- Carr, Z.R.; DeVoria, A.C.; Ringuette, M.J. Aspect-ratio effects on rotating wings: Circulation and forces. J. Fluid Mech. 2015, 767, 497–525. [Google Scholar] [CrossRef]
- Bhat, S.S.; Zhao, J.; Sheridan, J.; Hourigan, K.; Thompson, M.C. Uncoupling the effects of aspect ratio, Reynolds number and Rossby number on a rotating insect-wing planform. J. Fluid Mech. 2018, 859, 921–948. [Google Scholar] [CrossRef]
- Smith, D.T.; Rockwell, D.; Sheridan, J.; Thompson, M. Effect of radius of gyration on a wing rotating at low Reynolds number: A computational study. Phys. Rev. Fluids 2017, 2, 064701. [Google Scholar] [CrossRef]
- Bhat, S.S.; Thompson, M.C. Effect of leading-edge curvature on the aerodynamics of insect wings. Int. J. Heat Fluid Flow 2021, 93, 108898. [Google Scholar] [CrossRef]
- Wolfinger, M.; Rockwell, D. Flow structure on a rotating wing: Effect of radius of gyration. J. Fluid Mech. 2014, 755, 83–110. [Google Scholar] [CrossRef]
- Maxworthy, T. Experiments on the Weis-Fogh mechanism of lift generation by insects in hovering flight. Part 1. Dynamics of the ‘fling’. J. Fluid Mech. 1979, 93, 47–63. [Google Scholar] [CrossRef]
- Ramasamy, M.; Leishman, J.G. Phase-Locked Particle Image Velocimetry Measurements of a Flapping Wing. J. Aircr. 2006, 43, 1867–1875. [Google Scholar] [CrossRef]
- Wolfinger, M.; Rockwell, D. Transformation of flow structure on a rotating wing due to variation of radius of gyration. Exp. Fluids 2015, 56, 137. [Google Scholar] [CrossRef]
- Birch, J.M.; Dickson, W.B.; Dickinson, M.H. Force production and flow structure of the leading edge vortex on flapping wings at high and low Reynolds numbers. J. Exp. Biol. 2004, 207, 1063–1072. [Google Scholar] [CrossRef]
- Shyy, W.; Liu, H. Flapping Wings and Aerodynamic Lift: The Role of Leading-Edge Vortices. AIAA J. 2007, 45, 2817–2819. [Google Scholar] [CrossRef]
- Zangeneh, R. Stability of Leading-edge Vortices over Pitch up Wings under Sweep. In Proceedings of the AiAA SciTech Forum, San Diego, CA, USA, 3-7 January 2022; AIAA: Reston, VA, USA, 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Ellington, C.P. The Aerodynamics of Hovering Insect Flight. VI. Lift and Power Requirements. Philos. Trans. R. Soc. B. Biol. Sci. 1984, 305, 145–181. [Google Scholar] [CrossRef]
- Dickson, W.B.; Dickinson, M.H. The effect of advance ratio on the aerodynamics of revolving wings. J. Exp. Biol. 2004, 207, 4269–4281. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.J.; Lua, K.B.; Lim, T.T.; Yeo, K.S. A quasi-steady aerodynamic model for flapping flight with improved adaptability. Bioinspir. Biomim. 2016, 11, 036005. [Google Scholar] [CrossRef] [PubMed]
- Han, J.S.; Kim, J.K.; Chang, J.W.; Han, J.H. An improved quasi-steady aerodynamic model for insect wings that considers movement of the center of pressure. Bioinspir. Biomim. 2015, 10, 046014. [Google Scholar] [CrossRef]
- Dickinson, M.H. The effects of wing rotation on unsteady aerodynamic performance at low Reynolds numbers. J. Exp. Biol. 1994, 192, 179–206. [Google Scholar] [CrossRef]
- Wang, Z.J.; Birch, J.M.; Dickinson, M.H. Unsteady forces and flows in low Reynolds number hovering flight: Two-dimensional computations vs robotic wing experiments. J. Exp. Biol. 2004, 207, 449–460. [Google Scholar] [CrossRef]
- Usherwood, J.R.; Ellington, C.P. The aerodynamics of revolving wings II. Propeller force coefficients from mayfly to quail. J. Exp. Biol. 2002, 205, 1565–1576. [Google Scholar] [CrossRef] [PubMed]
- Nabawy, M.R.A.; Crowther, W.J. Aero-optimum hovering kinematics. Bioinspir. Biomim. 2015, 10, 044002. [Google Scholar] [CrossRef] [PubMed]
- Manar, F.; Jones, A.R. The effect of tip clearance on low reynolds number rotating wings. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MA, USA, 13–17 January 2014; AIAA: Reston, VA, USA, 2014. p. 1452. [CrossRef]
- Ellington, C.P. The aerodynamics of hovering insect flight. II. Morphological parameters. Philos. Trans. R. Soc. Lond. B Biol. Sci. 1984, 305, 17–40. [Google Scholar] [CrossRef]
- Nabawy, M.R.A.; Marcinkeviciute, R. Scalability of resonant motor-driven flapping wing propulsion systems. R. Soc. Open Sci. 2021, 8, 210452. [Google Scholar] [CrossRef]
- Chen, Y.; Ma, K.; Wood, R.J. Influence of wing morphological and inertial parameters on flapping flight performance. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejon, Korea, 9–14 October 2016; IEEE: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Li, H.; Nabawy, M.R.A. Wing Planform Effect on the Aerodynamics of Insect Wings. Insects 2022, 13, 459. [Google Scholar] [CrossRef]
- Li, H.; Nabawy, M.R.A. Effects of Stroke Amplitude and Wing Planform on the Aerodynamic Performance of Hovering Flapping Wings. Aerospace 2022, 9, 479. [Google Scholar] [CrossRef]
- Zhao, L.; Deng, X.; Sane, S.P. Modulation of leading edge vorticity and aerodynamic forces in flexible flapping wings. Bioinspir. Biomim. 2011, 6, 036007. [Google Scholar] [CrossRef]
- Zhao, L.; Huang, Q.; Deng, X.; Sane, S.P. Aerodynamic effects of flexibility in flapping wings. J. R. Soc. Interface 2009, 7, 485–497. [Google Scholar] [CrossRef]
- Zhao, L.; Huang, Q.; Deng, X.; Sane, S. The effect of chord-wise flexibility on the aerodynamic force generation of flapping wings: Experimental studies. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; IEEE: New York, NY, USA, 2009. pp. 4207–4212. [CrossRef]
- Nabawy, M.R.A.; Crowther, W.J. On the quasi-steady aerodynamics of normal hovering flight part I: The induced power factor. J. R. Soc. Interface 2014, 11, 20131196. [Google Scholar] [CrossRef]
- Usherwood, J.R. The aerodynamic forces and pressure distribution of a revolving pigeon wing. Exp. Fluids 2009, 46, 991–1003. [Google Scholar] [CrossRef] [PubMed]
- Ansari, S.A.; Phillips, N.; Stabler, G.; Wilkins, P.C.; Żbikowski, R.; Knowles, K. Experimental investigation of some aspects of insect-like flapping flight aerodynamics for application to micro air vehicles. Exp. Fluids 2009, 46, 777–798. [Google Scholar] [CrossRef]
- Phillips, N.; Knowles, K. Positive and Negative Spanwise Flow Development on an Insect-Like Rotating Wing. J. Aircr. 2013, 50, 1321–1332. [Google Scholar] [CrossRef]
- Schlueter, K.L.; Jones, A.R.; Granlund, K.; Ol, M. Force Coefficients of Low Reynolds Number Rotating Wings. In Proceedings of the 51st AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Dallas, TX, USA, 7–10 January 2013; AIAA: Reston, VA, USA, 2013. pp. 1–11. [CrossRef]
- Chen, L.; Wu, J.; Cheng, B. Volumetric measurement and vorticity dynamics of leading-edge vortex formation on a revolving wing. Exp. Fluids 2018, 60, 12. [Google Scholar] [CrossRef]
- Weis-Fogh, T. Quick estimates of flight fitness in hovering animals, including novel mechanisms for lift production. J. Exp. Biol. 1973, 59, 169–230. [Google Scholar] [CrossRef]
- Ellington, C. The Aerodynamics of Hovering Insect Flight. III. Kinematics. Philos. Trans. R. Soc. B Biol. Sci. 1984, 305, 41–78. [Google Scholar] [CrossRef]
- Schlueter, K.L.; Jones, A.R.; Granlund, K.; Ol, M. Effect of Root Cutout on Force Coefficients of Rotating Wings. AIAA J. 2014, 52, 1322–1325. [Google Scholar] [CrossRef]
- Mancini, P.M.; Manar, F.; Jones, A.R. A semi-empirical approach to modeling lift production. In Proceedings of the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015; AIAA: Reston, VA, USA, 2015. pp. 1–15. [CrossRef]
- Manar, F.; Jones, A.R. Evaluation of potential flow models for unsteady separated flow with respect to experimental data. Phys. Rev. Fluids 2019, 4, 034702. [Google Scholar] [CrossRef]
- Mancini, P.; Jones, A.R.; Ol, M.V.; Granlund, K. Parameter studies on translating rigid and flexible wings. In Proceedings of the 52nd Aerosp Sciences Meeting, National Harbor, MA, USA, 13–17 January 2014; AIAA: Reston, VA, USA, 2014. pp. 1–15. [CrossRef]
- Ringuette, M.J. Vortex Formation and Drag on Low Aspect Ratio, Normal Flat Plates, ProQuest Dissertations and Theses. California Institute of Technology, Pasadena, CA, USA, 2004.
- Manar, F.; Medina, A.; Jones, A.R. Tip vortex structure and aerodynamic loading on rotating wings in confined spaces. Exp. Fluids 2014, 55, 1815. [Google Scholar] [CrossRef]
- Jones, A.R. Flapping and Rotary Wing Lift at Low Reynolds Number. Air Force Research Laboratory. AF Office Of Scientific Research (AFOSR)/RTB1: Arlington, VA, USA, 2016; p. AFRL-AFOSR-VA-TR-2016-0098. [Google Scholar]
- Nabawy, M.R.A.; Crowther, W.J. A quasi-steady lifting line theory for insect-like hovering flight. PLoS ONE 2015, 10, e0134972. [Google Scholar] [CrossRef] [PubMed]
- Whitney, J.P.; Wood, R.J. Aeromechanics of passive rotation in flapping flight. J. Fluid Mech. 2010, 660, 197–220. [Google Scholar] [CrossRef]
- Lentink, D.; Jongerius, S.R.; Bradshaw, N.L. The Scalable Design of Flapping Micro-Air Vehicles Inspired by Insect Flight; Floreano, D., Zufferey, J.-C., Srinivasan, M.V., Ellington, C., Eds.; Chapter 14; Springer: Berlin/Heidelberg, Germany, 2010; pp. 185–205. [Google Scholar] [CrossRef]
- Nabawy, M.R.A.; Crowther, W.J. Optimum hovering wing planform. J. Theor. Biol. 2016, 406, 187–191. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | (mm) | (mm) | (mm) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Laser-cut acrylic | 5 | 3 | 60 | 2 | 120 | 0.092 | 0.4 | 0.476 | 0.509 | 0.554 |
| 0.5 | 0.559 | 0.589 | 0.626 | |||||||
| 0.6 | 0.639 | 0.665 | 0.691 | |||||||
| 3 | 180 | 0.061 | 0.4 | 0.476 | 0.498 | 0.546 | ||||
| 0.5 | 0.559 | 0.579 | 0.618 | |||||||
| 0.6 | 0.639 | 0.656 | 0.684 | |||||||
| 3D Printed PLA | 4 | 2 | 50 | 2 | 100 | 0.110 | 0.4 | 0.476 | 0.515 | 0.559 |
| 0.5 | 0.559 | 0.594 | 0.630 | |||||||
| 0.6 | 0.639 | 0.670 | 0.695 | |||||||
| 3 | 150 | 0.073 | 0.4 | 0.476 | 0.502 | 0.550 | ||||
| 0.5 | 0.559 | 0.583 | 0.621 | |||||||
| 0.6 | 0.639 | 0.660 | 0.687 | |||||||
| Laser-cut stainless steel | 3 | 2 | 66.7 | 2 | 133 | 0.083 | 0.4 | 0.476 | 0.505 | 0.552 |
| 0.5 | 0.559 | 0.586 | 0.624 | |||||||
| 0.6 | 0.639 | 0.663 | 0.689 | |||||||
| 3 | 200 | 0.055 | 0.4 | 0.476 | 0.495 | 0.545 | ||||
| 0.5 | 0.559 | 0.577 | 0.617 | |||||||
| 0.6 | 0.639 | 0.655 | 0.682 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Broadley, P.; Nabawy, M.R.A. On the Validity of the Normal Force Model for Steadily Revolving Wings: An Experimental Investigation. Aerospace 2023, 10, 388. https://doi.org/10.3390/aerospace10050388
Broadley P, Nabawy MRA. On the Validity of the Normal Force Model for Steadily Revolving Wings: An Experimental Investigation. Aerospace. 2023; 10(5):388. https://doi.org/10.3390/aerospace10050388
Chicago/Turabian StyleBroadley, Paul, and Mostafa R. A. Nabawy. 2023. "On the Validity of the Normal Force Model for Steadily Revolving Wings: An Experimental Investigation" Aerospace 10, no. 5: 388. https://doi.org/10.3390/aerospace10050388
APA StyleBroadley, P., & Nabawy, M. R. A. (2023). On the Validity of the Normal Force Model for Steadily Revolving Wings: An Experimental Investigation. Aerospace, 10(5), 388. https://doi.org/10.3390/aerospace10050388