
Nonintrusive Aerodynamic Shape Optimisation with a POD-DEIM Based Trust Region Method



Abstract
:1. Introduction
2. Methodology
2.1. The General Optimisation Problem
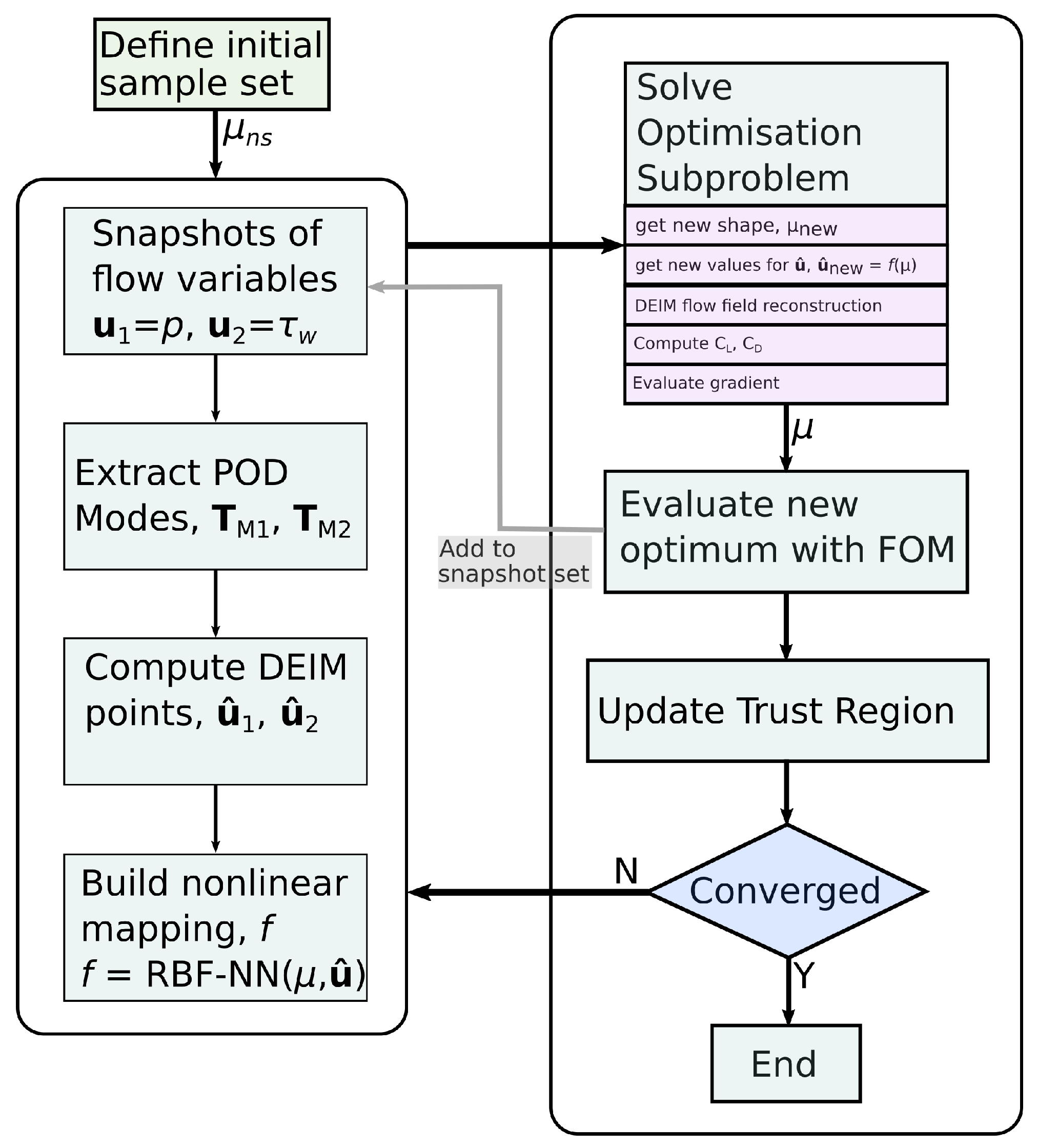
2.2. Nonintrusive Reduced-Order Modelling
| Algorithm 1 DEIM method for interpolation index selection [33] |
Input: Subspace Output: Interpolation indices
|
2.3. Proper Orthogonal Decomposition
2.4. Interpolation Point Estimation
2.5. Trust Region Model Management
3. Results
3.1. Onera M6 Test Case
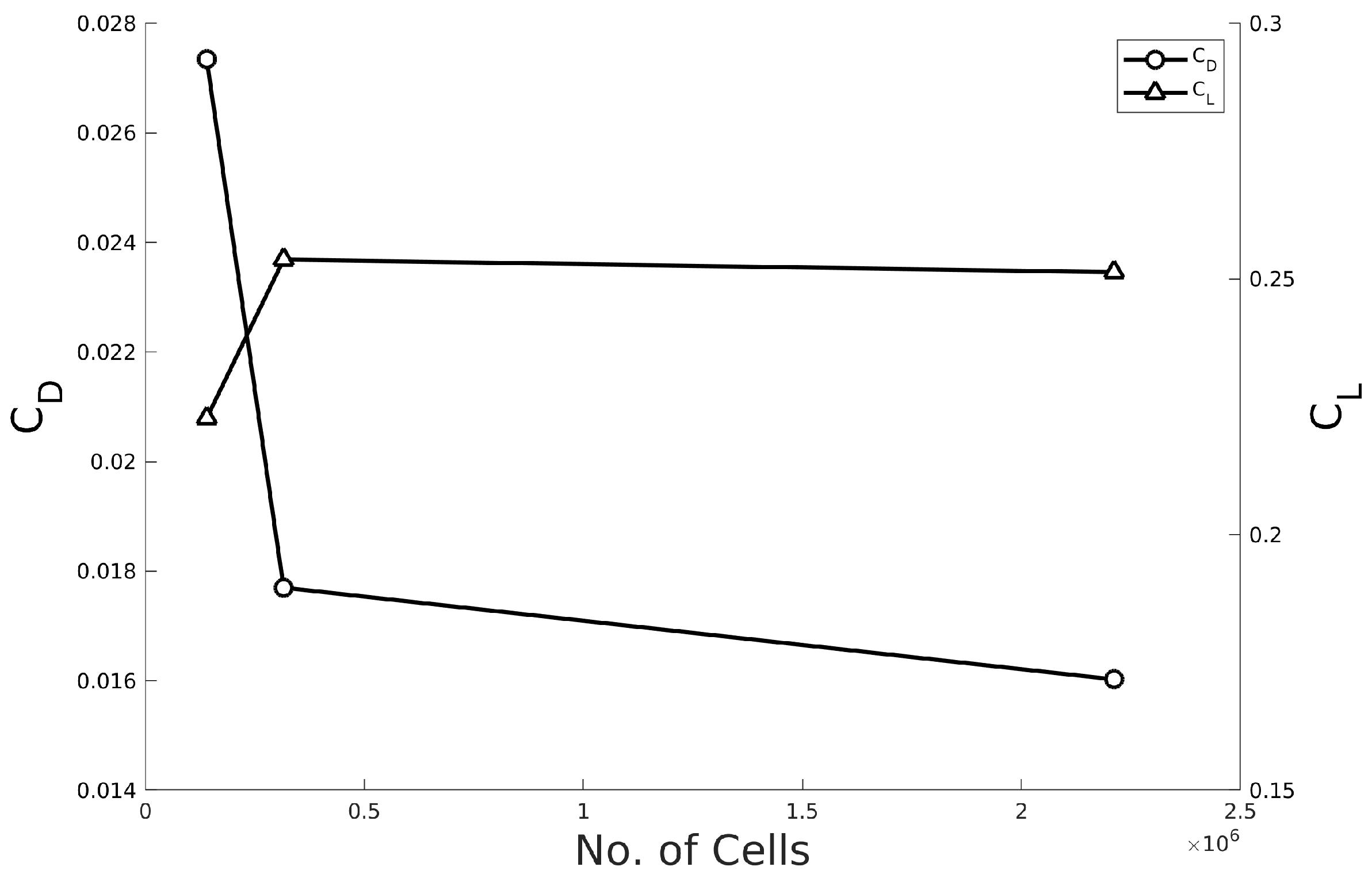
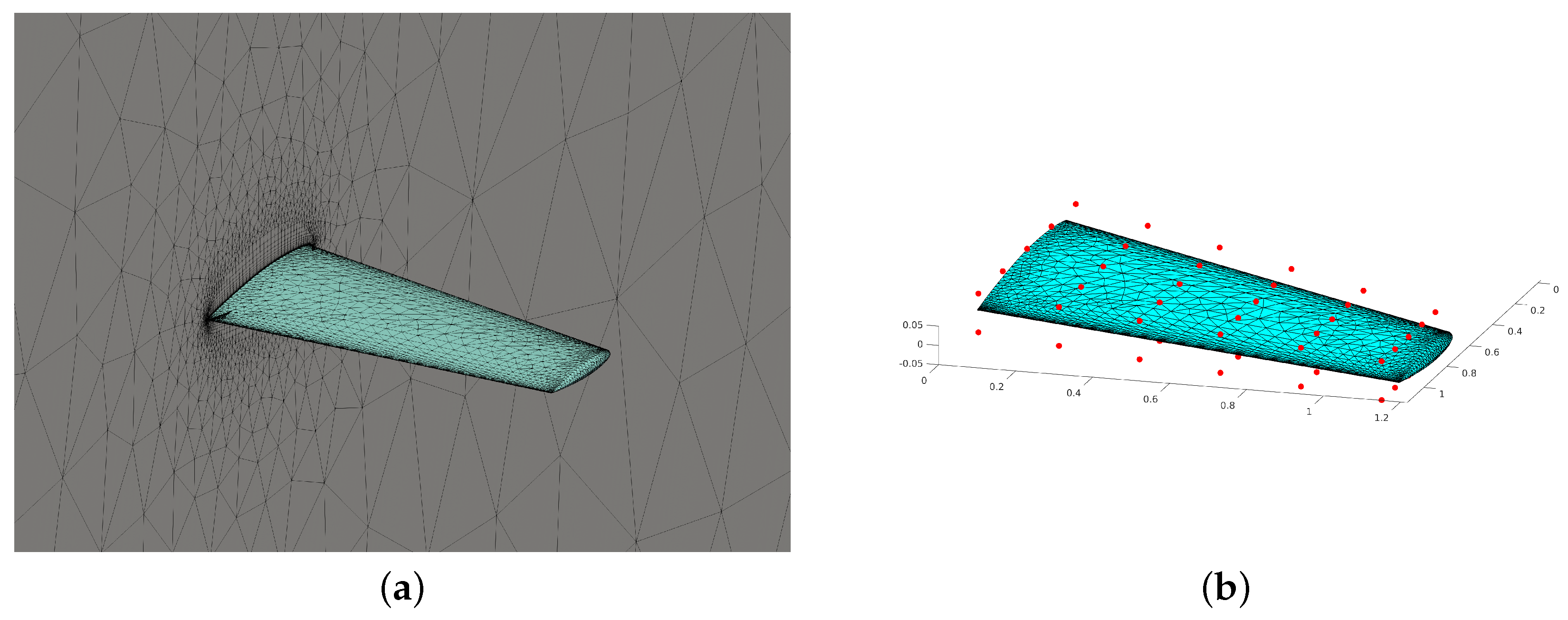
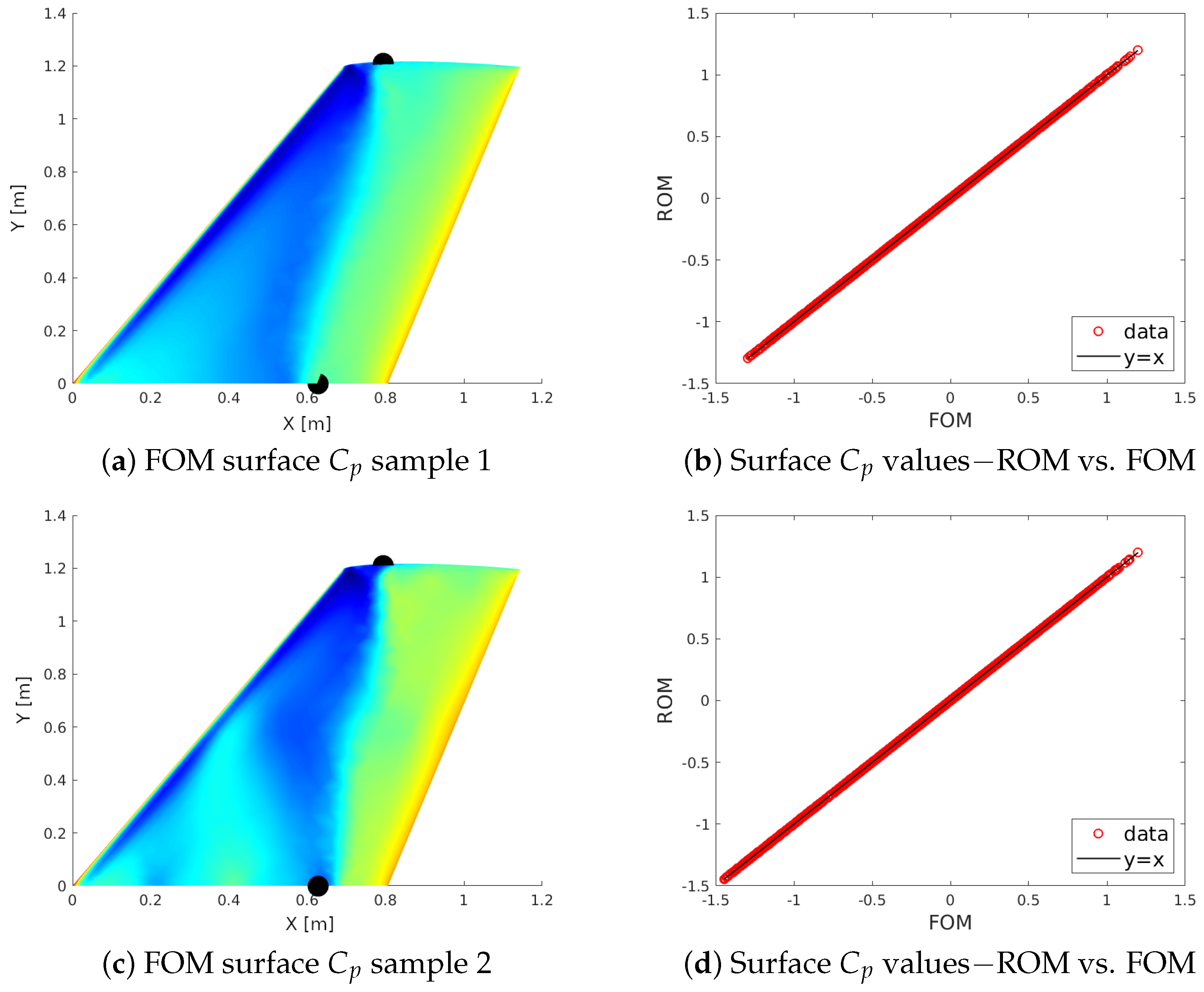
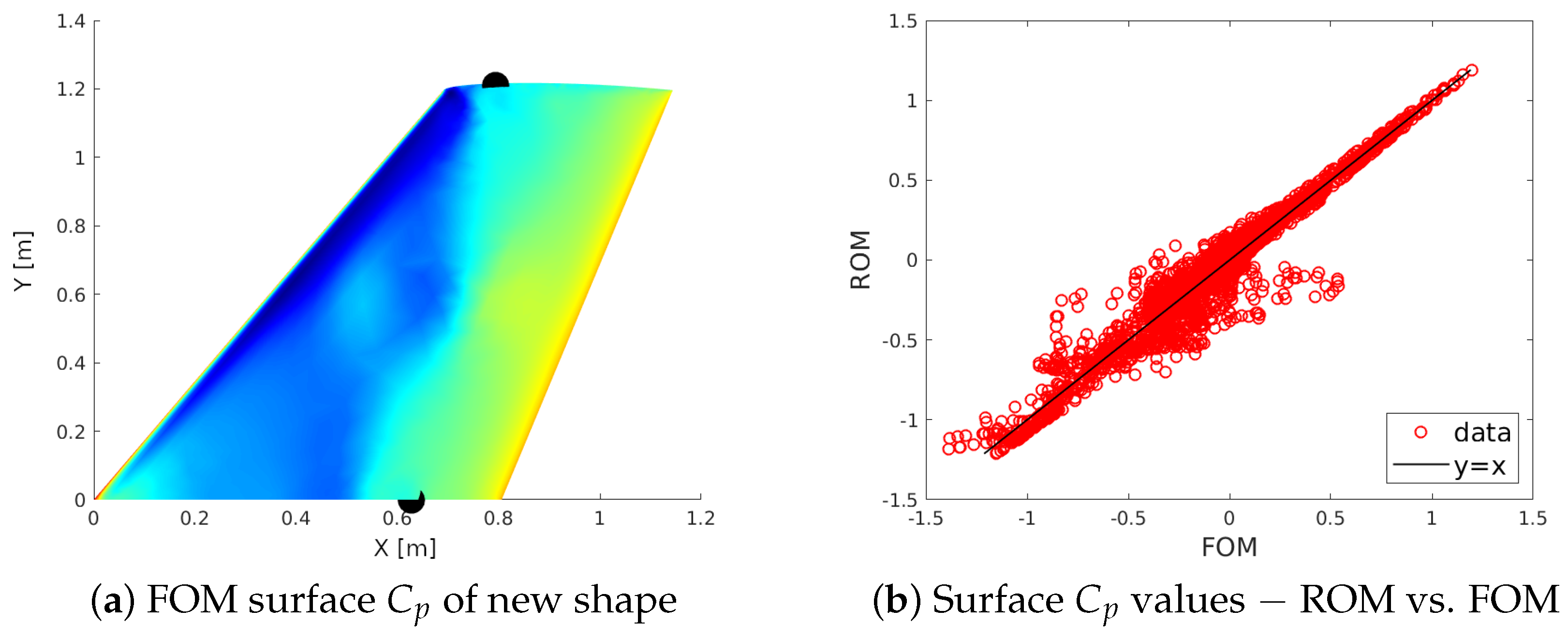
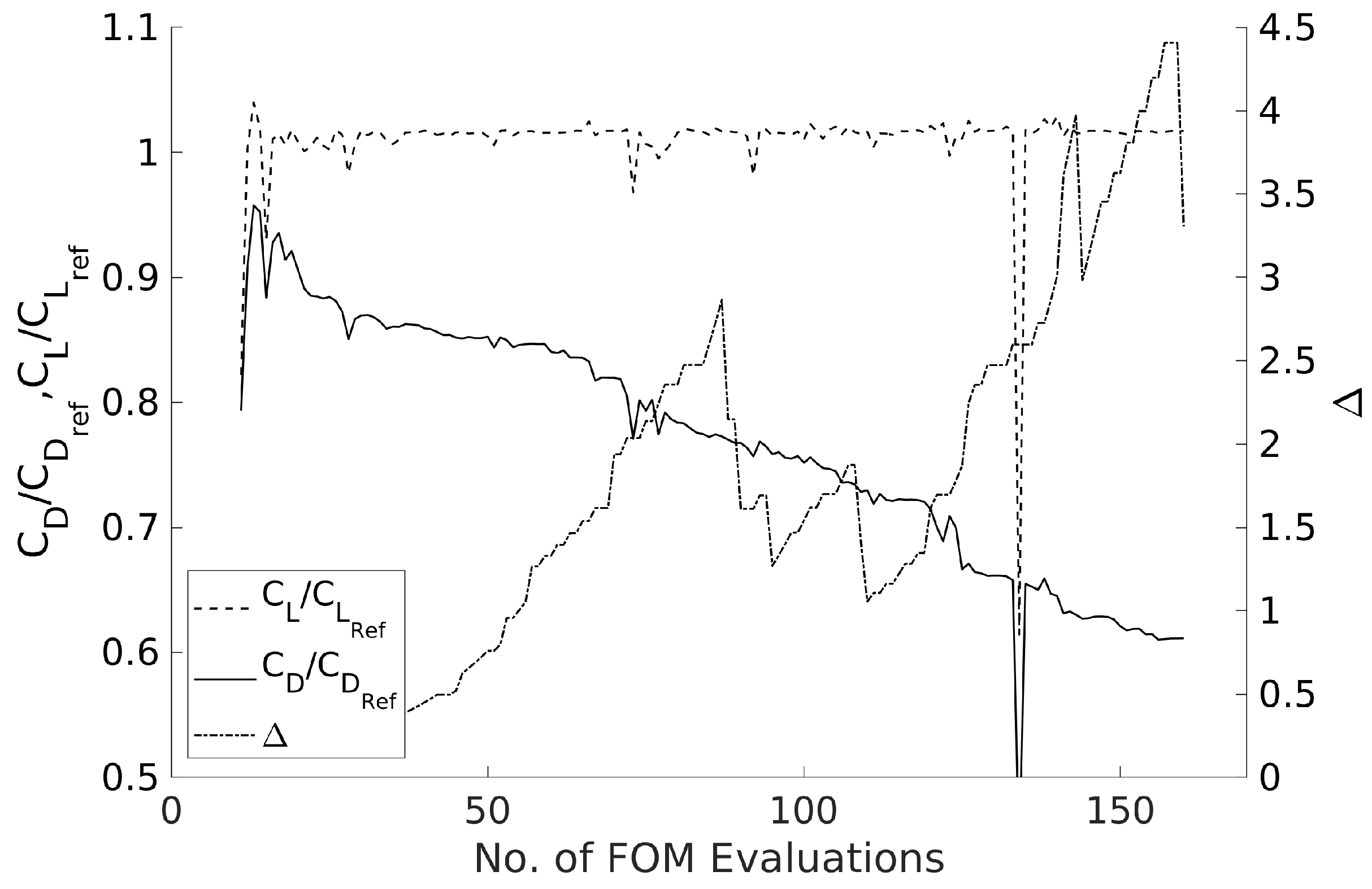
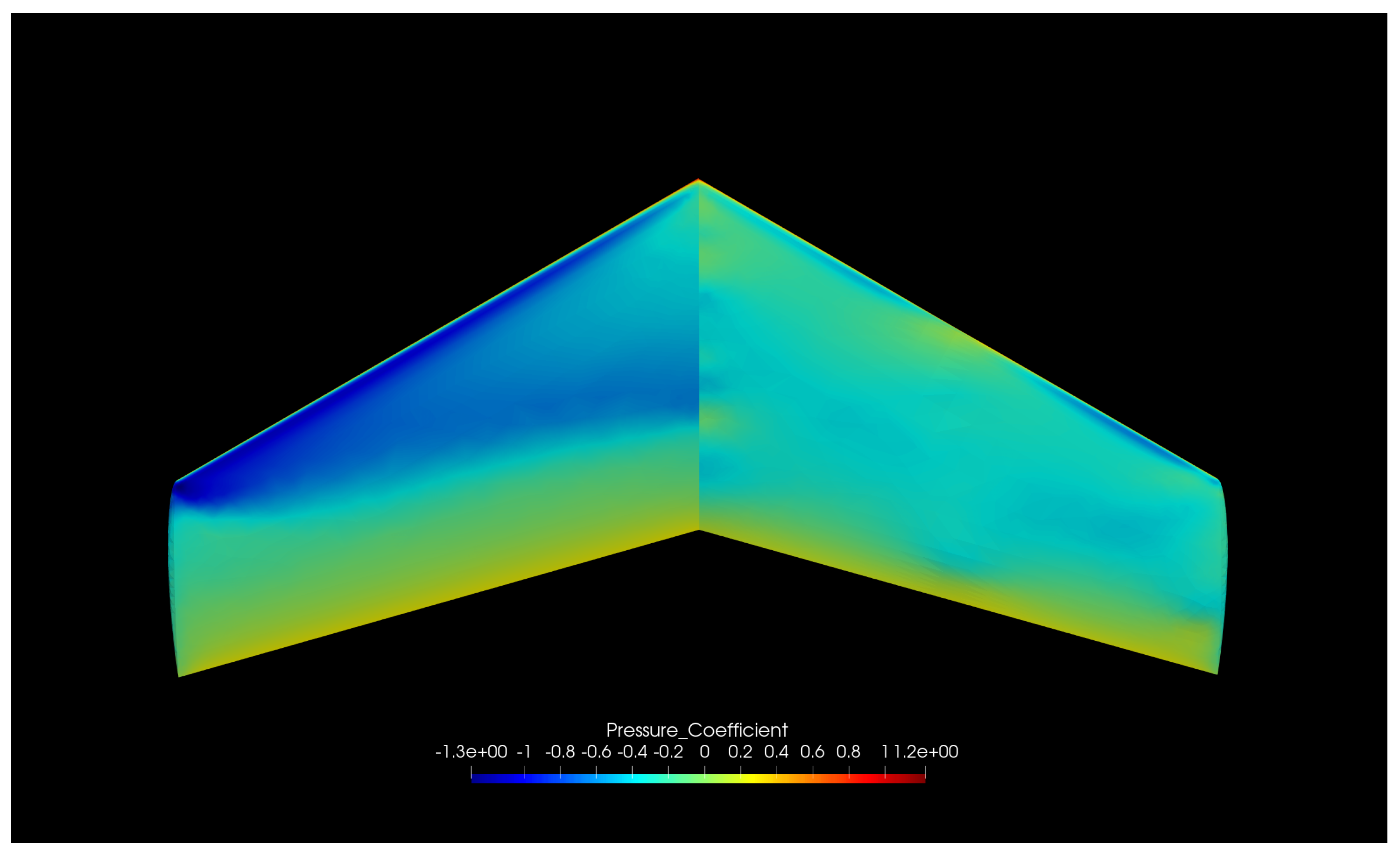
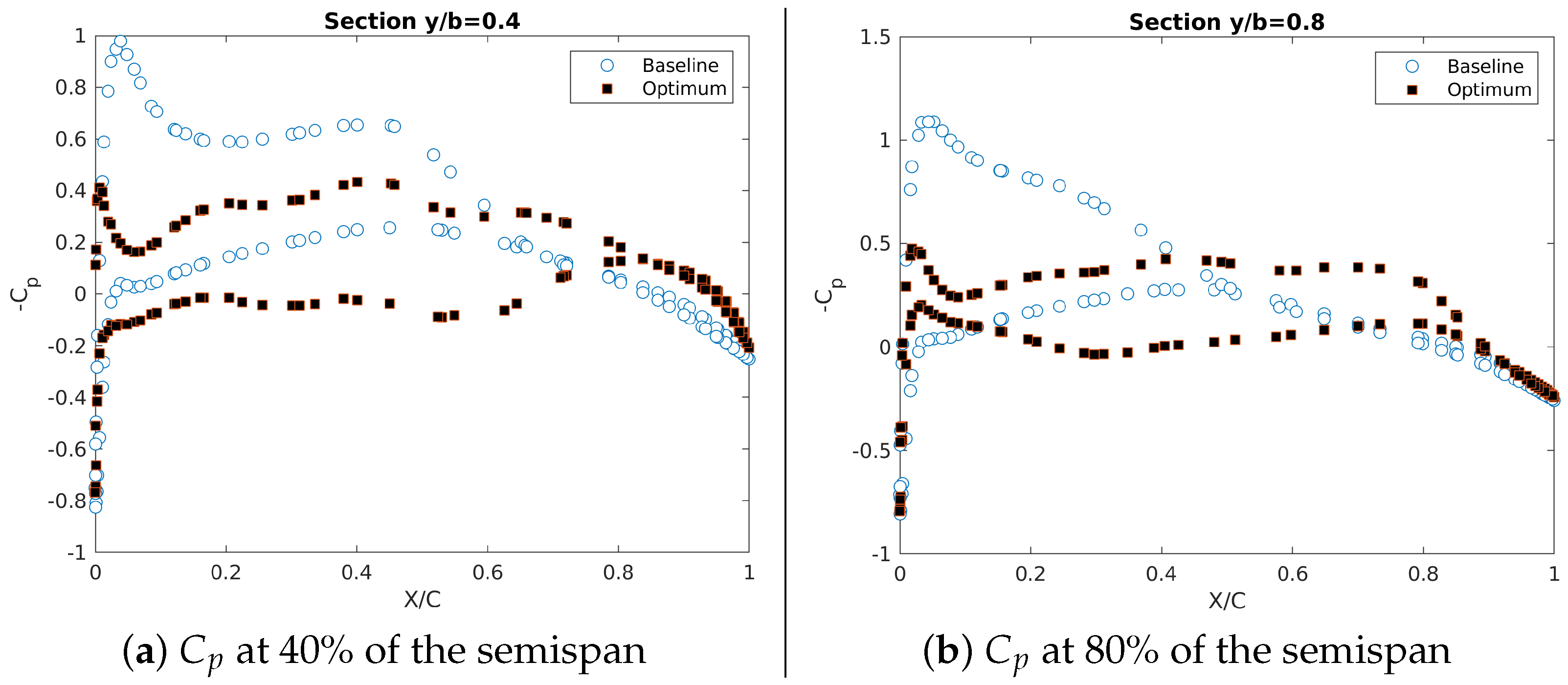
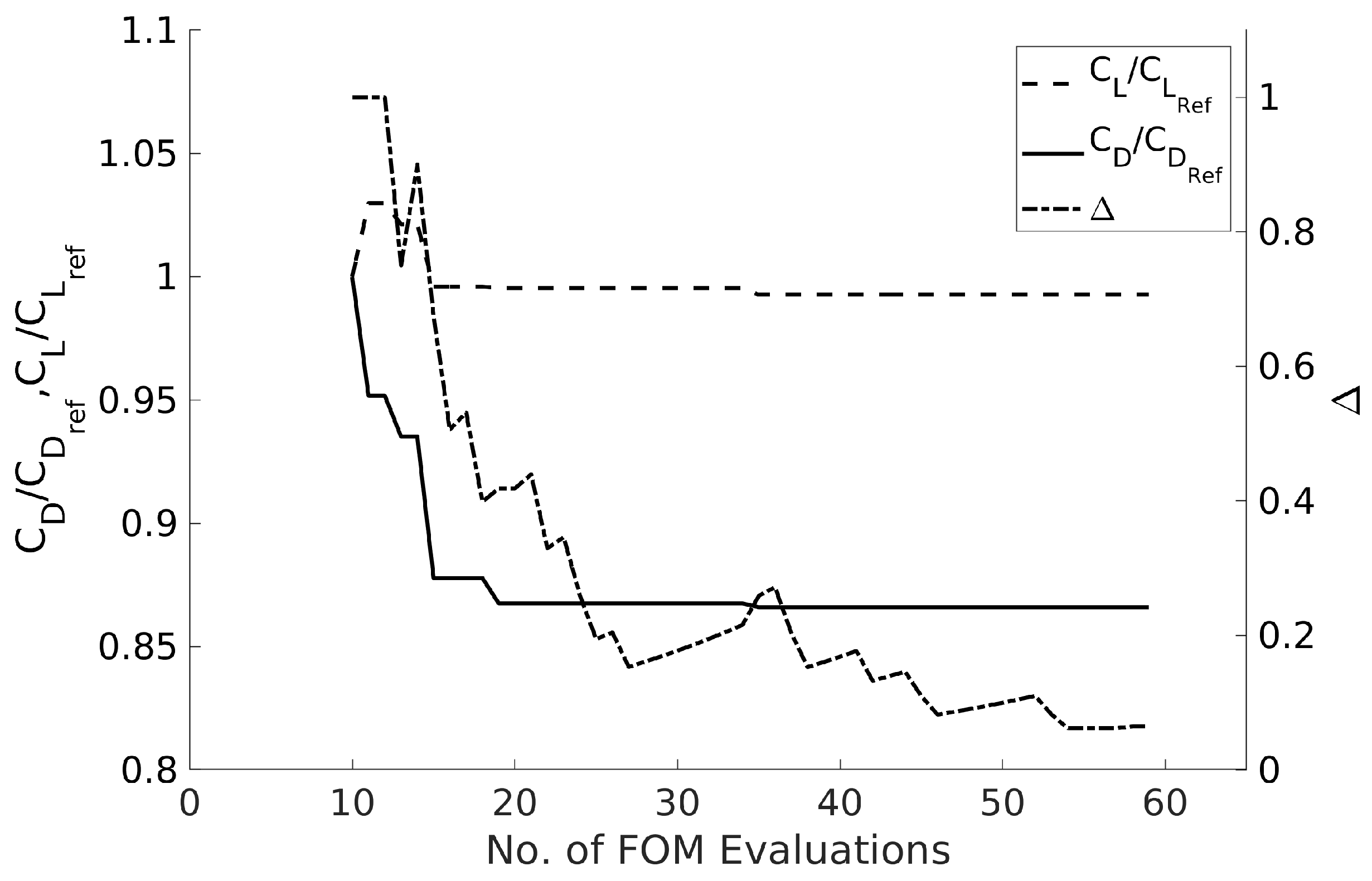
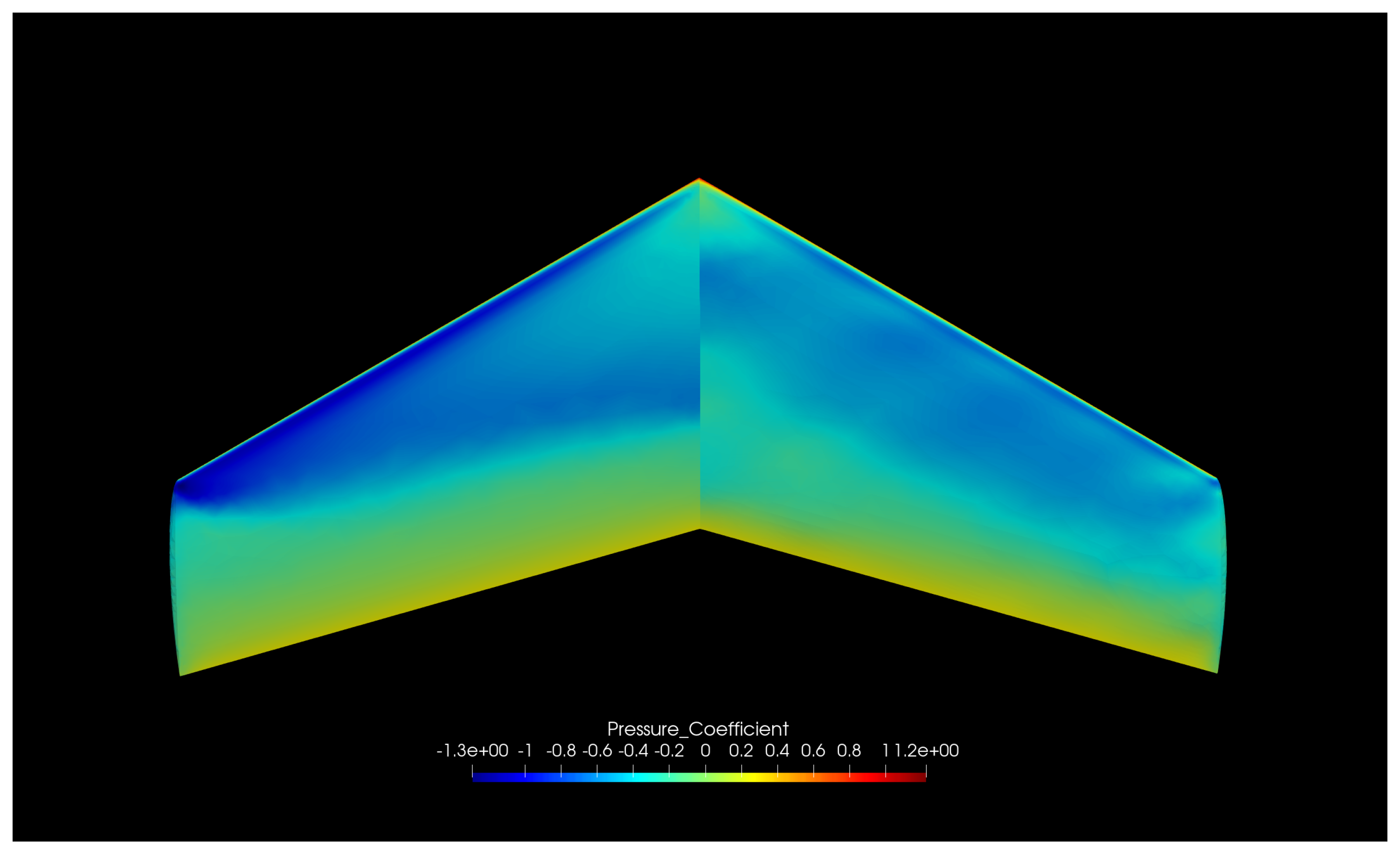
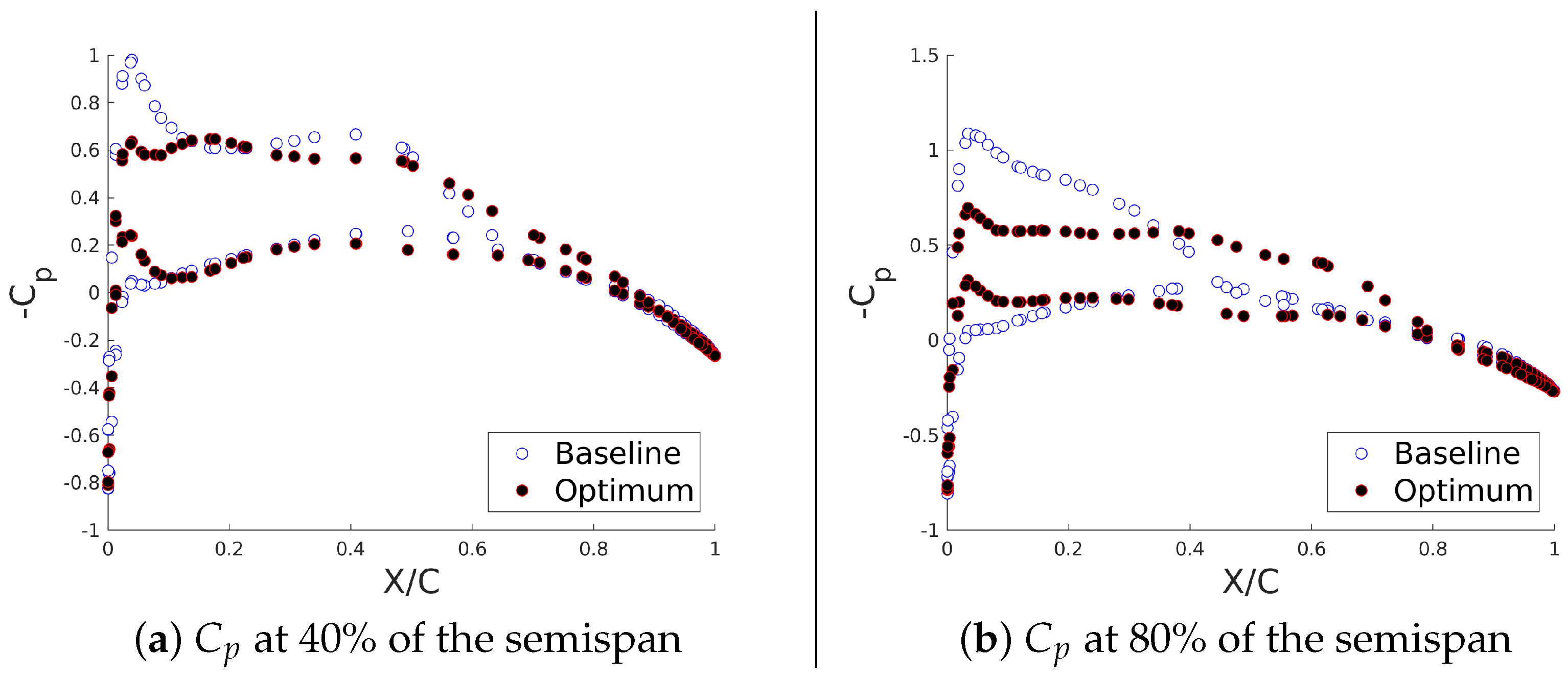
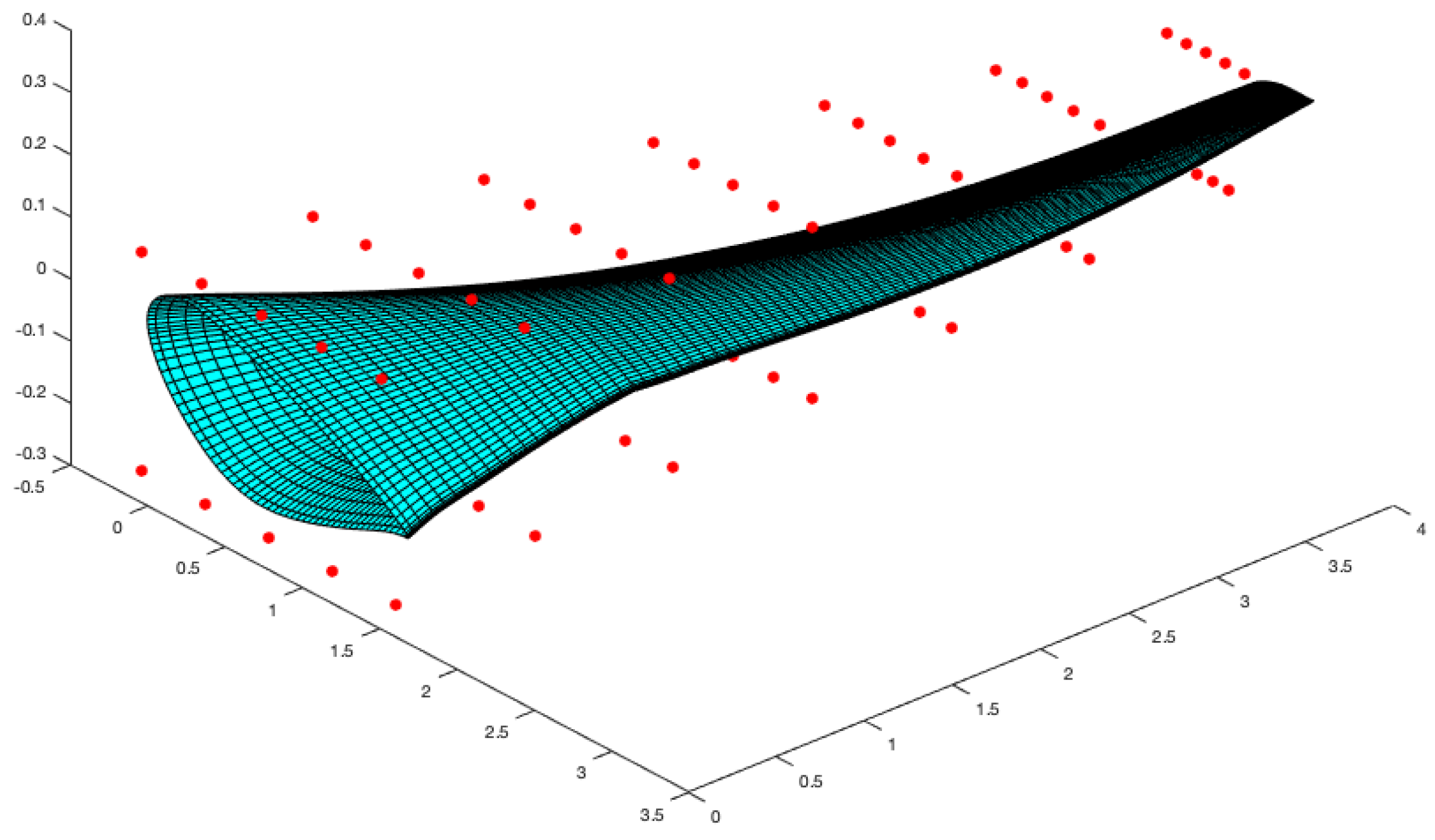
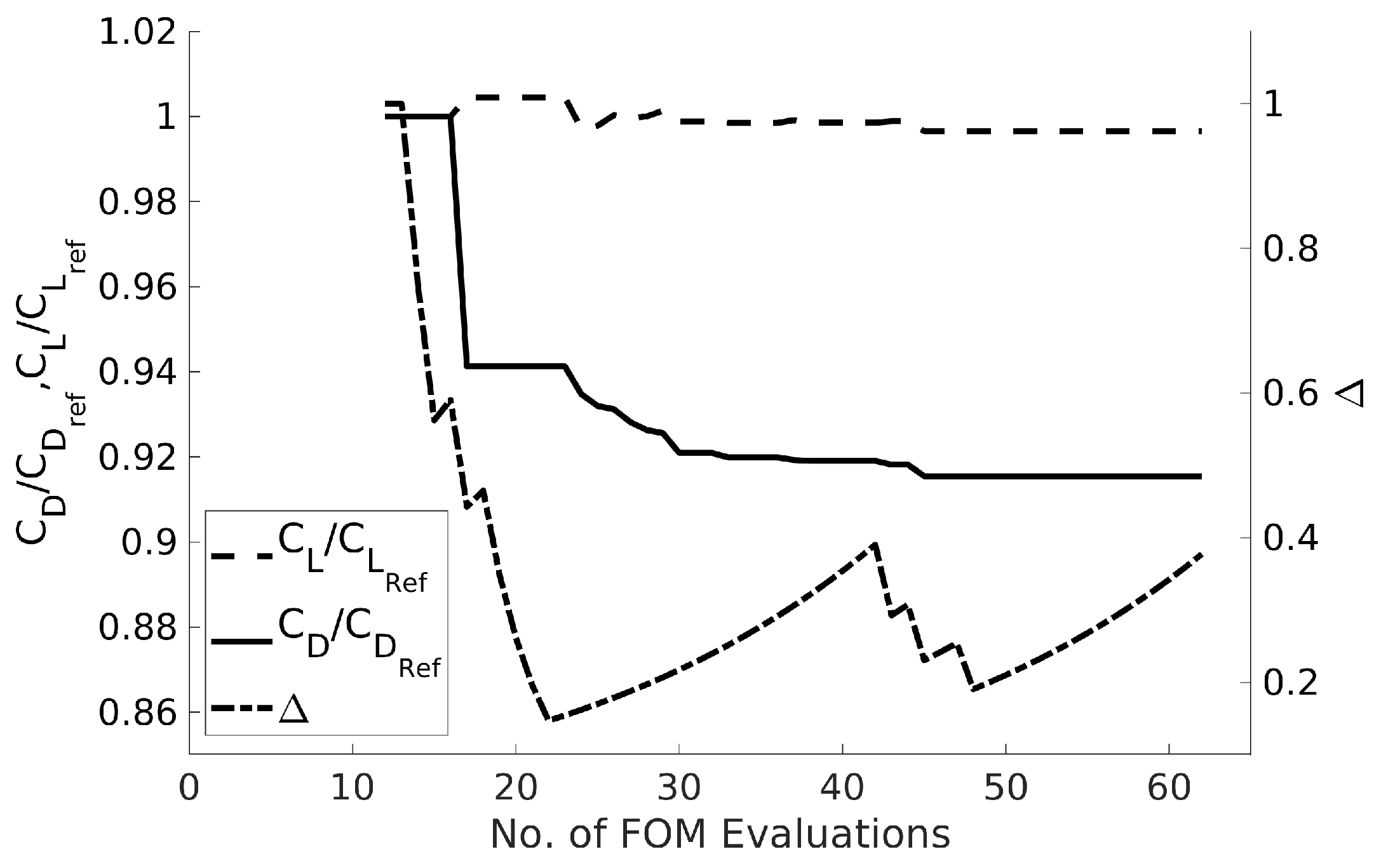
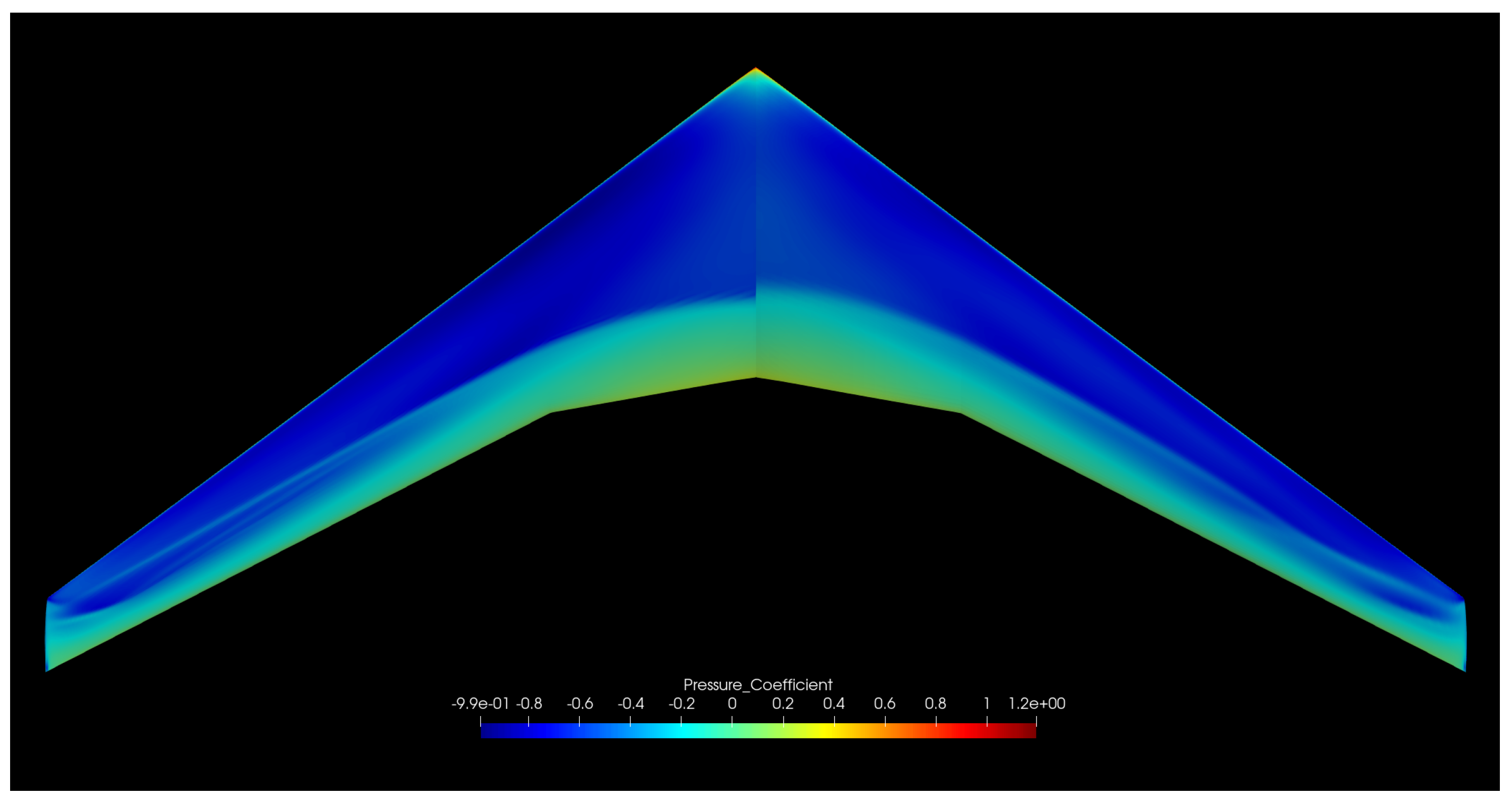
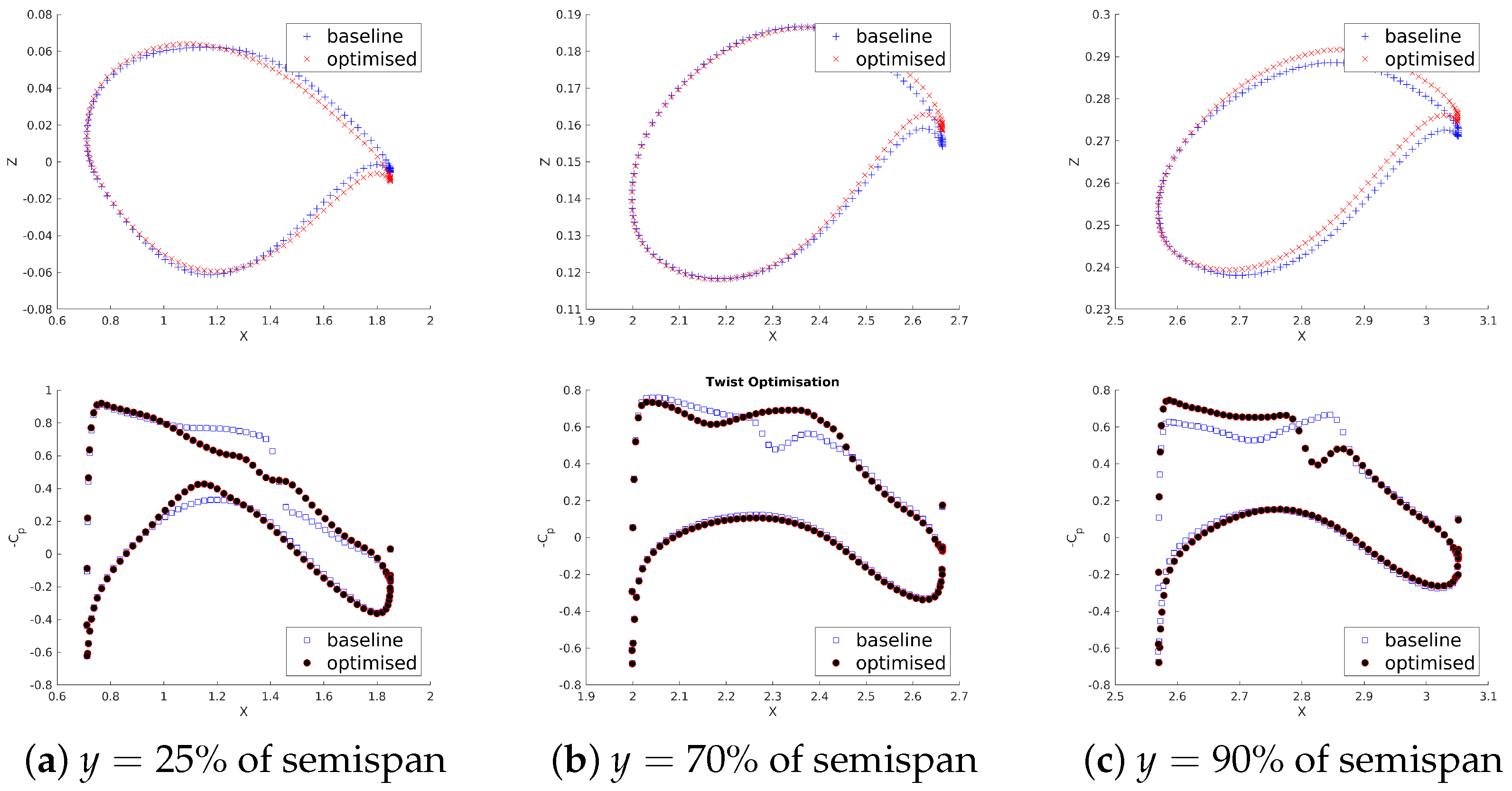
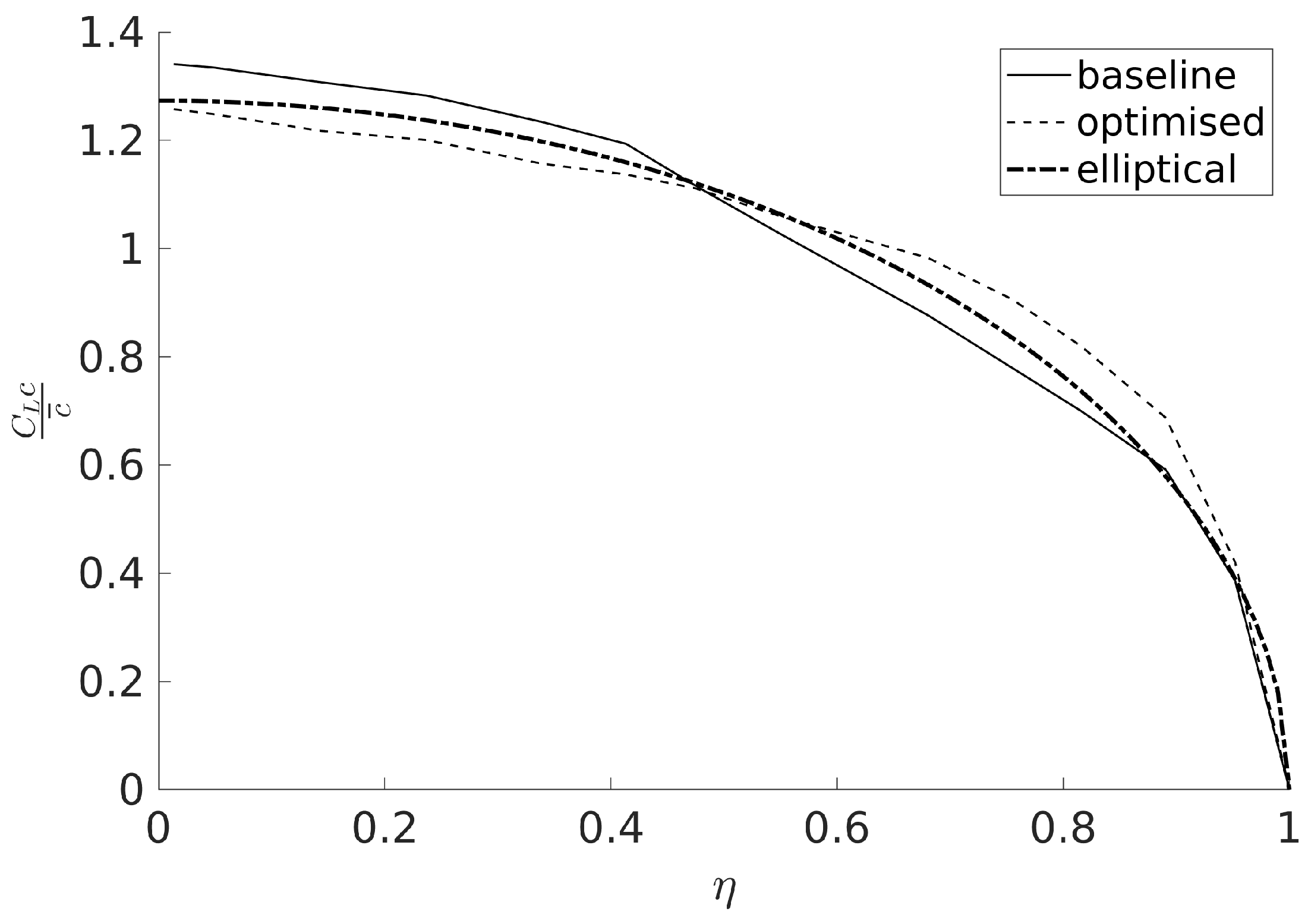
3.2. CRM Wing Test Case
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Latin Symbols | |
| Snapshot matrix | |
| drag coefficient | |
| lift coefficient | |
| pressure coefficient | |
| DEIM coefficients | |
| equality constraint | |
| inequality constraint | |
| E | energy per unit mass |
| objective function | |
| design parameter lower bound values | |
| free-stream Mach number | |
| N | number of points in full-order model |
| number of optimisation design variables | |
| number of reduced bases | |
| number of samples to build ROM | |
| p | pressure |
| ℘ | DEIM interpolation indices matrix |
| vector of fluid equation residuals | |
| s | optimisation step |
| eigenvalues of snapshot matrix | |
| reduced-basis matrix | |
| left singular vectors | |
| design parameter upper bound values | |
| right singular vectors | |
| conserved flow variables | |
| velocity vector | |
| vector containing surface pressures | |
| Greek Symbols | |
| step length for Newtown method, angle of attack | |
| trust region radius | |
| trust region effectiveness thresholds | |
| nondimensional span location | |
| design parameters | |
| density | |
| wall shear stress | |
| Mixed Symbols | |
| energy per unit volume | |
| momentum per unit volume |
References
- Pironneau, O. Optimal Shape Design for Elliptic Systems; Springer Series in Computational Physics; Springer: Berlin/Heidelberg, Germany, 1984. [Google Scholar] [CrossRef]
- Jameson, A. Aerodynamic design via control theory. J. Sci. Comput. 1988, 3, 233–260. [Google Scholar] [CrossRef]
- Jameson, A.; Martinelli, L.; Pierce, N. Optimum aerodynamic design using the Navier–Stokes equations. Theor. Comput. Fluid Dyn. 1998, 10, 213–237. [Google Scholar] [CrossRef]
- Elliott, J.; Peraire, J. Practical three-dimensional aerodynamic design and optimization using unstructured meshes. AIAA J. 1997, 35, 1479–1485. [Google Scholar] [CrossRef]
- Nielsen, E.J.; Anderson, W.K. Aerodynamic design optimization on unstructured meshes using the Navier-Stokes equations. AIAA J. 1999, 37, 1411–1419. [Google Scholar] [CrossRef]
- Giles, M.B.; Pierce, N.A. An Introduction to the Adjoint Approach to Design. Flow Turbul. Combust. 2000, 65, 393–415. [Google Scholar] [CrossRef]
- Knill, D.L.; Giunta, A.A.; Baker, C.A.; Grossman, B.; Mason, W.H.; Haftka, R.T.; Watson, L.T. Response surface models combining linear and Euler aerodynamics for supersonic transport design. J. Aircr. 1999, 36, 75–86. [Google Scholar] [CrossRef]
- Kumano, T.; Jeong, S.; Obayashi, S.; Ito, Y.; Hatanaka, K.; Morino, H. Multidisciplinary design optimization of wing shape for a small jet aircraft using kriging model. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006; p. 932. [Google Scholar] [CrossRef]
- Hashimoto, A.; Jeong, S.; Obayashi, S. Aerodynamic optimization of near-future high-wing aircraft. Trans. Jpn. Soc. Aeronaut. Space Sci. 2015, 58, 73–82. [Google Scholar] [CrossRef]
- Toal, D.J.; Bressloff, N.; Keane, A.; Holden, C. The development of a hybridized particle swarm for kriging hyperparameter tuning. Eng. Optim. 2011, 43, 675–699. [Google Scholar] [CrossRef]
- Jahangirian, A.; Shahrokhi, A. Aerodynamic shape optimization using efficient evolutionary algorithms and unstructured CFD solver. Comput. Fluids 2011, 46, 270–276. [Google Scholar] [CrossRef]
- Schmitz, A. Constructive Neural Networks for Function Approximation and Their Application to CFD Shape Optimization. Ph.D. Thesis, Claremont Graduate University, California State University, Long Beach, CA, USA, 2007. [Google Scholar]
- Padron, A.S.; Alonso, J.J.; Eldred, M.S. Multi-fidelity methods in aerodynamic robust optimization. In Proceedings of the 18th AIAA Non-Deterministic Approaches Conference, San Diego, CA, USA, 4–8 January 2016; p. 0680. [Google Scholar] [CrossRef]
- Monschke, J.A.; Eldred, M.S. Multilevel-multifidelity acceleration of PDE-constrained optimization. In Proceedings of the 58th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Grapevine, TX, USA, 9–13 January 2017; p. 0132. [Google Scholar] [CrossRef]
- Sirovich, L. Turbulence and the dynamics of coherent structures. I: Coherent Structures. II: Symmetries and Transformations. III: Dynamics and Scaling. Q. Appl. Math. 1987, 45, 583–590. [Google Scholar] [CrossRef]
- Willcox, K.; Peraire, J. Balanced model reduction via the proper orthogonal decomposition. AIAA J. 2002, 40, 2323–2330. [Google Scholar] [CrossRef]
- Rowley, C.W. Model Reduction for Fluids, using Balanced Proper Orthogonal Decomposition. Int. J. Bifurc. Chaos 2005, 15, 997–1013. [Google Scholar] [CrossRef]
- Ammar, A.; Mokdad, B.; Chinesta, F.; Keunings, R. A new family of solvers for some classes of multidimensional partial differential equations encountered in kinetic theory modeling of complex fluids. J. Non-Newton. Fluid Mech. 2006, 139, 153–176. [Google Scholar] [CrossRef]
- Lucia, D.J.; Beran, P.S.; Silva, W.A. Reduced-order modeling: New approaches for computational physics. Prog. Aerosp. Sci. 2004, 40, 51–117. [Google Scholar] [CrossRef]
- Noack, B.R.; Morzynski, M.; Tadmor, G. Reduced-Order Modelling for Flow Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 528. [Google Scholar]
- Lassila, T.; Manzoni, A.; Quarteroni, A.; Rozza, G. Model order reduction in fluid dynamics: Challenges and perspectives. In Reduced Order Methods for Modeling and Computational Reduction; Springer: Berlin/Heidelberg, Germany, 2014; pp. 235–273. [Google Scholar] [CrossRef]
- Benner, P.; Gugercin, S.; Willcox, K. A Survey of Projection-Based Model Reduction Methods for Parametric Dynamical Systems. SIAM Rev. 2015, 57, 483–531. [Google Scholar] [CrossRef]
- Amsallem, D.; Farhat, C.; Haasdonk, B. Special Issue on Model Reduction. Int. J. Numer. Methods Eng. 2015, 102, 931–932. [Google Scholar] [CrossRef]
- Yondo, R.; Andrés, E.; Valero, E. A review on design of experiments and surrogate models in aircraft real-time and many-query aerodynamic analyses. Prog. Aerosp. Sci. 2018, 96, 23–61. [Google Scholar] [CrossRef]
- LeGresley, P.; Alonso, J. Airfoil design optimization using reduced order models based on proper orthogonal decomposition. In Proceedings of the Fluids 2000 Conference and Exhibit, Denver, CO, USA, 19–22 June 2000; p. 2545. [Google Scholar] [CrossRef]
- Demo, N.; Tezzele, M.; Mola, A.; Rozza, G. A complete data-driven framework for the efficient solution of parametric shape design and optimisation in naval engineering problems. arXiv 2019. [Google Scholar] [CrossRef]
- Manzoni, A.; Quarteroni, A.; Rozza, G. Shape optimization for viscous flows by reduced basis methods and free-form deformation. Int. J. Numer. Methods Fluids 2012, 70, 646–670. [Google Scholar] [CrossRef]
- Quarteroni, A.; Rozza, G. Optimal control and shape optimization of aorto-coronaric bypass anastomoses. Math. Model. Methods Appl. Sci. 2003, 13, 1801–1823. [Google Scholar] [CrossRef]
- Zahr, M.; Charbel, F. Progressive construction of a parametric reduced-order model for PDE-constrained optimization. Int. J. Numer. Methods Eng. 2015, 102, 1111–1135. [Google Scholar] [CrossRef]
- Carlberg, K.; Bou-Mosleh, C.; Farhat, C. Efficient non-linear model reduction via a least-squares Petrov-Galerkin projection and compressive tensor approximations. Int. J. Numer. Methods Eng. 2011, 86, 155–181. [Google Scholar] [CrossRef]
- Yao, W.; Marques, S.; Robinson, T.; Armstrong, C.; Sun, L. A reduced-order model for gradient-based aerodynamic shape optimisation. Aerosp. Sci. Technol. 2020, 106, 106120. [Google Scholar] [CrossRef]
- Yao, W.; Marques, S. Nonlinear aerodynamic and aeroelastic model reduction using a discrete empirical interpolation method. AIAA J. 2017, 55, 624–637. [Google Scholar] [CrossRef]
- Chaturantabut, S.; Sorensen, D.C. Nonlinear model reduction via discrete empirical interpolation. SIAM J. Sci. Comput. 2010, 32, 2737–2764. [Google Scholar] [CrossRef]
- Inc., T.M. MATLAB version: 9.13.0 (R2022b). 2022. Available online: https://www.mathworks.com/help/matlab/index.html?s_tid=CRUX_topnav (accessed on 5 March 2023).
- Schmitt, V.; Charpin, F. Pressure Distributions on the ONERA M6 Wing at Transonic Mach Numbers. Report of the Fluid Dynamics Panel Working Group 04. AGARD AR-138, May 1979. pp. B1–B44. Available online: https://tdl.libra.titech.ac.jp/journaldocs/recordID/article.bib-01/ZR000000447025?hit=-1&caller=xc-search (accessed on 5 March 2023).
- Mayeur, J.; Dumont, A.; Destarac, D.; Gleize, V. RANS simulations on TMR test cases and M6 wing with the Onera elsA flow solver. AIAA Pap. 2015, 1745, 2015. [Google Scholar] [CrossRef]
- Vassberg, J.; Dehaan, M.; Rivers, M.; Wahls, R. Development of a common research model for applied CFD validation studies. In Proceedings of the 26th AIAA Applied Aerodynamics Conference, Honolulu, HI, USA, 18–21 August 2008; p. 6919. [Google Scholar] [CrossRef]
- Economon, T.D.; Palacios, F.; Copeland, S.R.; Lukaczyk, T.W.; Alonso, J.J. SU2: An Open-Source Suite for Multiphysics Simulation and Design. AIAA J. 2016, 54, 828–846. [Google Scholar] [CrossRef]
- Lapuh, R. Mesh Morphing Technique used with Open-Source CFD Toolbox in Multidisciplinary Design Optimisation. 2018. Available online: https://www.semanticscholar.org/paper/Mesh-Morphing-Technique-used-with-Open-Source-CFD-Lapuh/f18ed2bea4fead68a08d248d16b9b6b17d5123af (accessed on 5 March 2023).
- Agarwal, D. Shape optimization using feature-based CAD systems and adjoint methods. Ph.D. Thesis, Queen’s University Belfast, Belfast, UK, 2018. [Google Scholar]
- Lyu, Z.; Kenway, G.K.; Martins, J.R. Aerodynamic shape optimization investigations of the common research model wing benchmark. AIAA J. 2015, 53, 968–985. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marques, S.; Kob, L.; Robinson, T.T.; Yao, W. Nonintrusive Aerodynamic Shape Optimisation with a POD-DEIM Based Trust Region Method. Aerospace 2023, 10, 470. https://doi.org/10.3390/aerospace10050470
Marques S, Kob L, Robinson TT, Yao W. Nonintrusive Aerodynamic Shape Optimisation with a POD-DEIM Based Trust Region Method. Aerospace. 2023; 10(5):470. https://doi.org/10.3390/aerospace10050470
Chicago/Turabian StyleMarques, Simão, Lucas Kob, Trevor T. Robinson, and Weigang Yao. 2023. "Nonintrusive Aerodynamic Shape Optimisation with a POD-DEIM Based Trust Region Method" Aerospace 10, no. 5: 470. https://doi.org/10.3390/aerospace10050470
APA StyleMarques, S., Kob, L., Robinson, T. T., & Yao, W. (2023). Nonintrusive Aerodynamic Shape Optimisation with a POD-DEIM Based Trust Region Method. Aerospace, 10(5), 470. https://doi.org/10.3390/aerospace10050470