
Full State Constrained Flight Tracking Control for Helicopter Systems with Disturbances


Abstract
:1. Introduction
2. Unmanned Helicopter Models
3. Flight-Tracking Controller Design
3.1. System Transformation
3.2. Nonlinear Disturbance Observer Design
3.3. State-Constrained Backstepping Controller Design
4. Stability Analysis
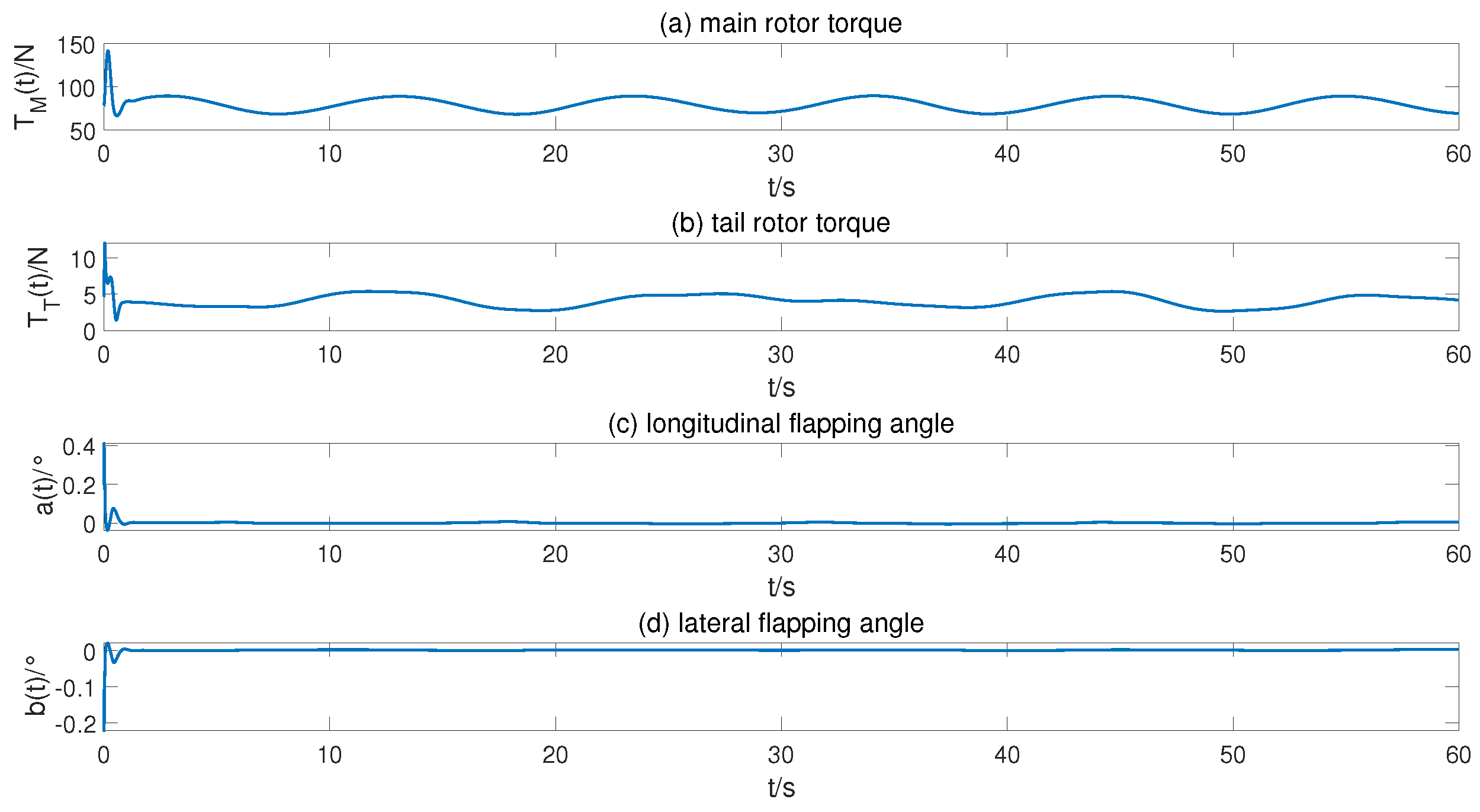
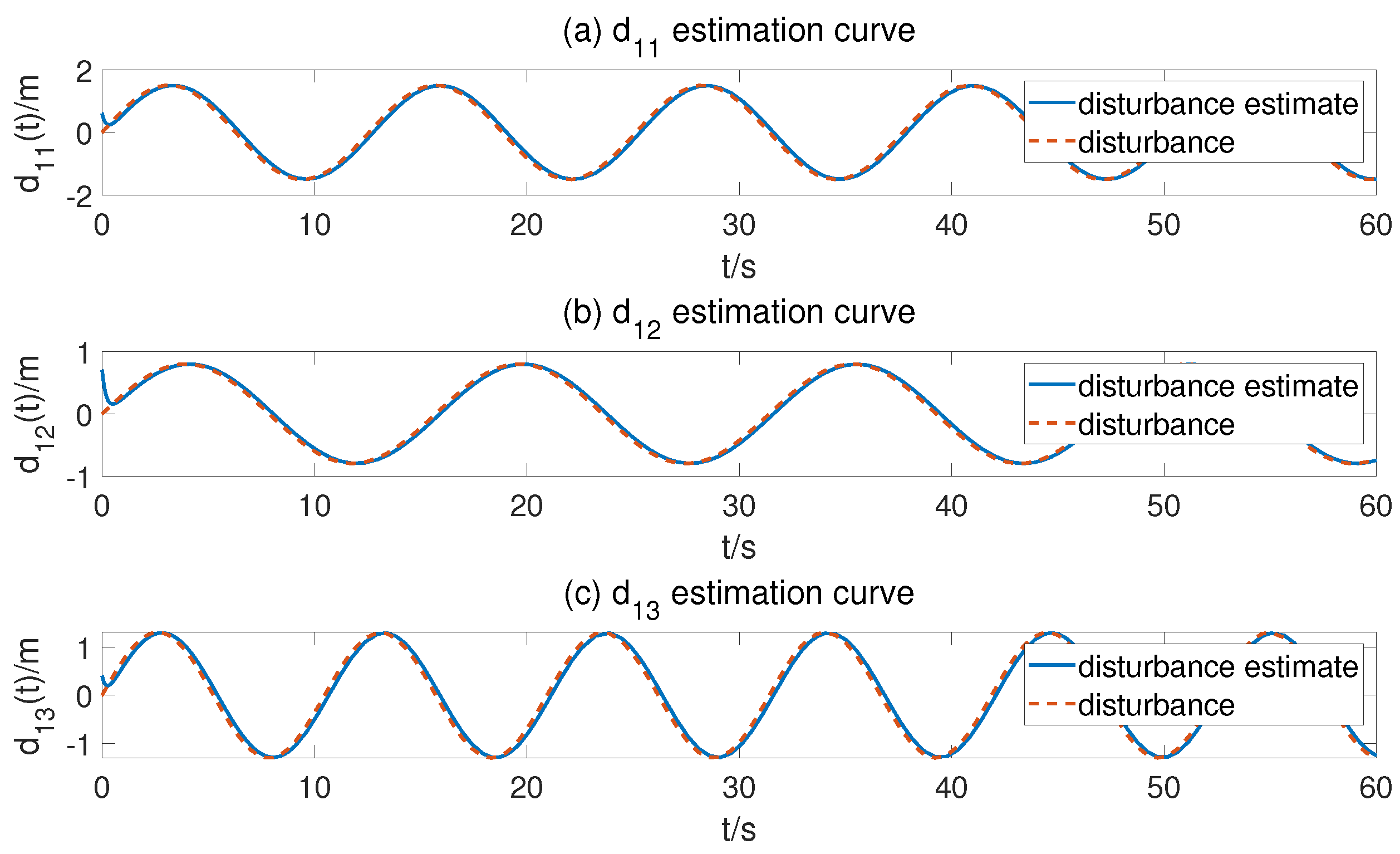
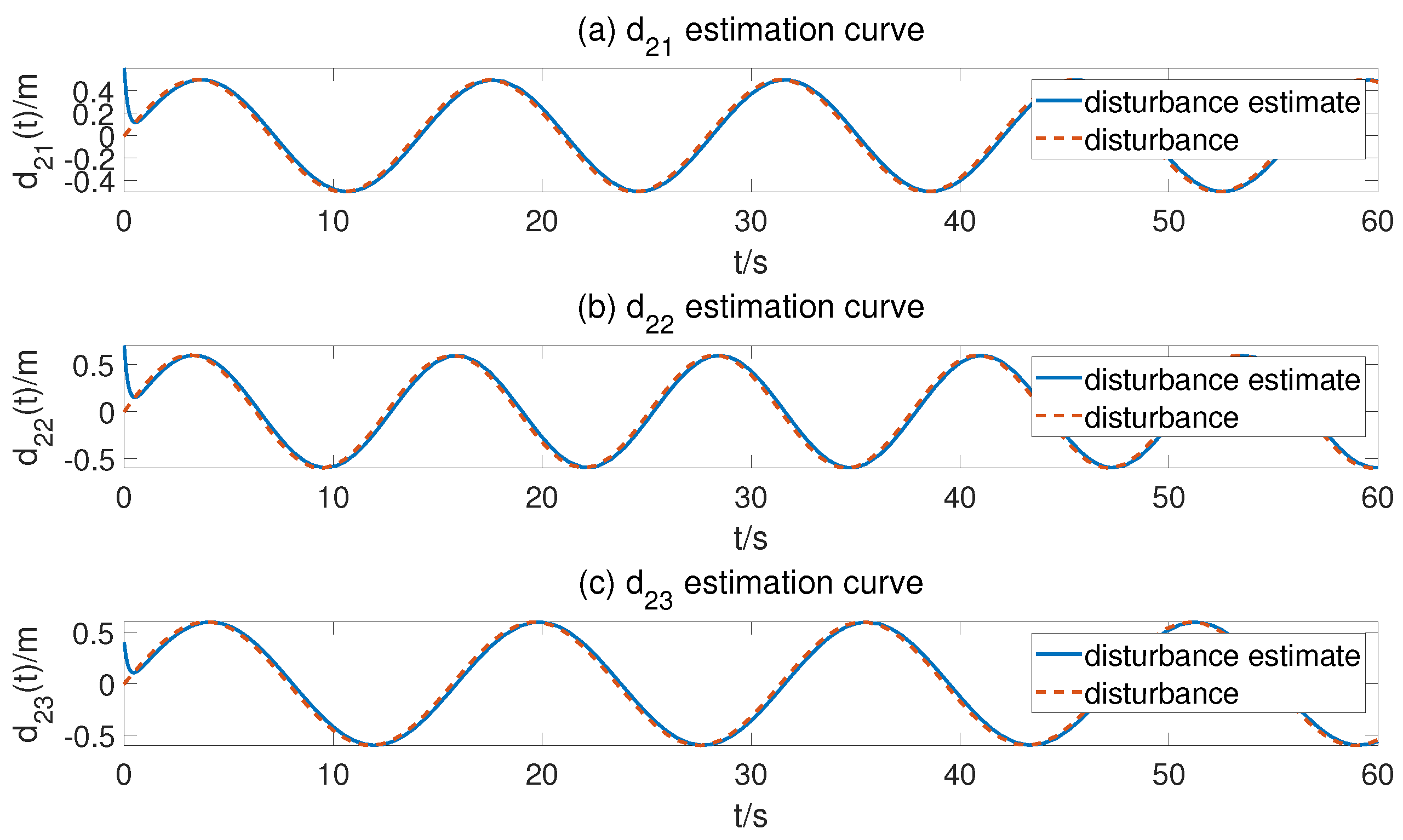
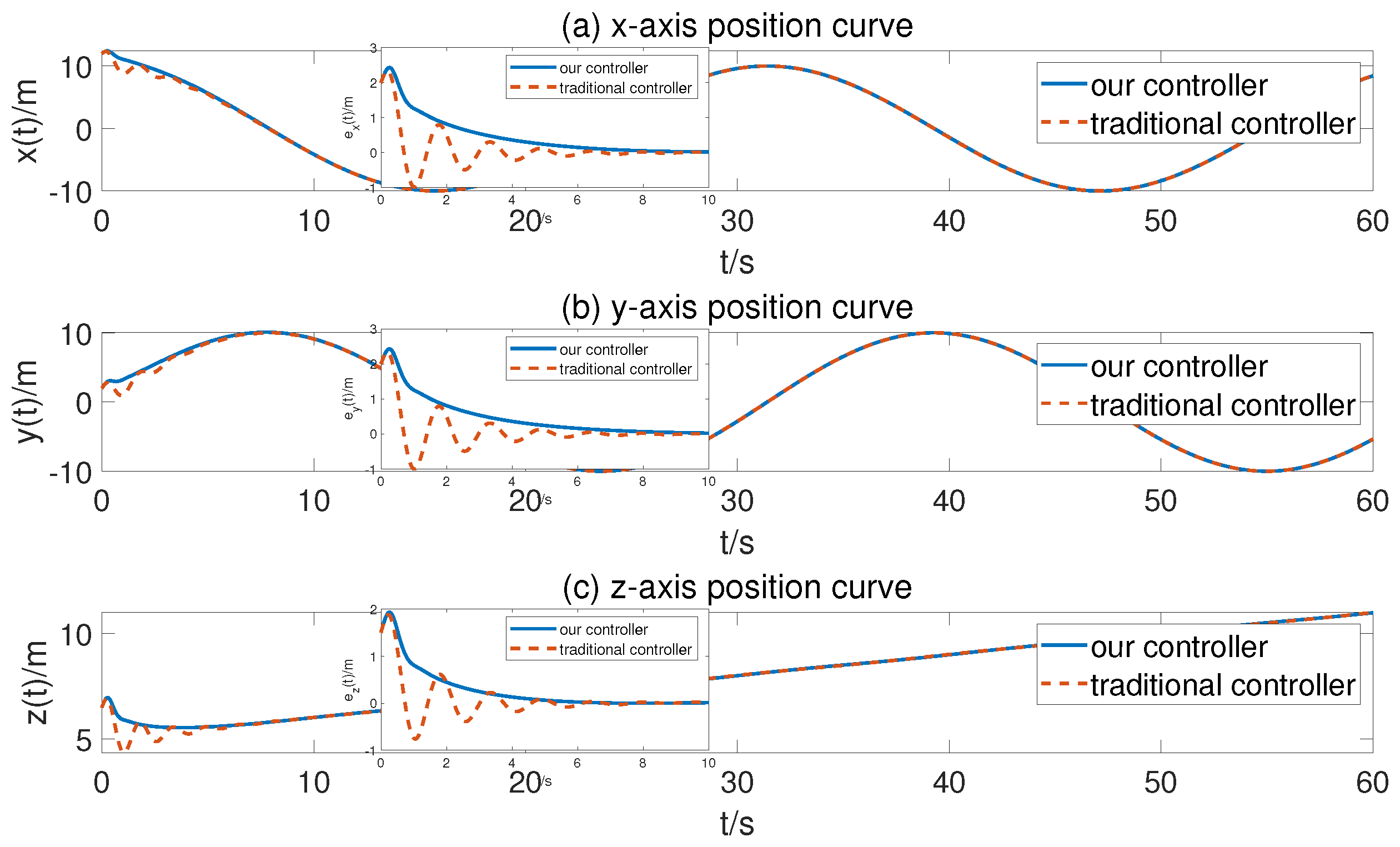
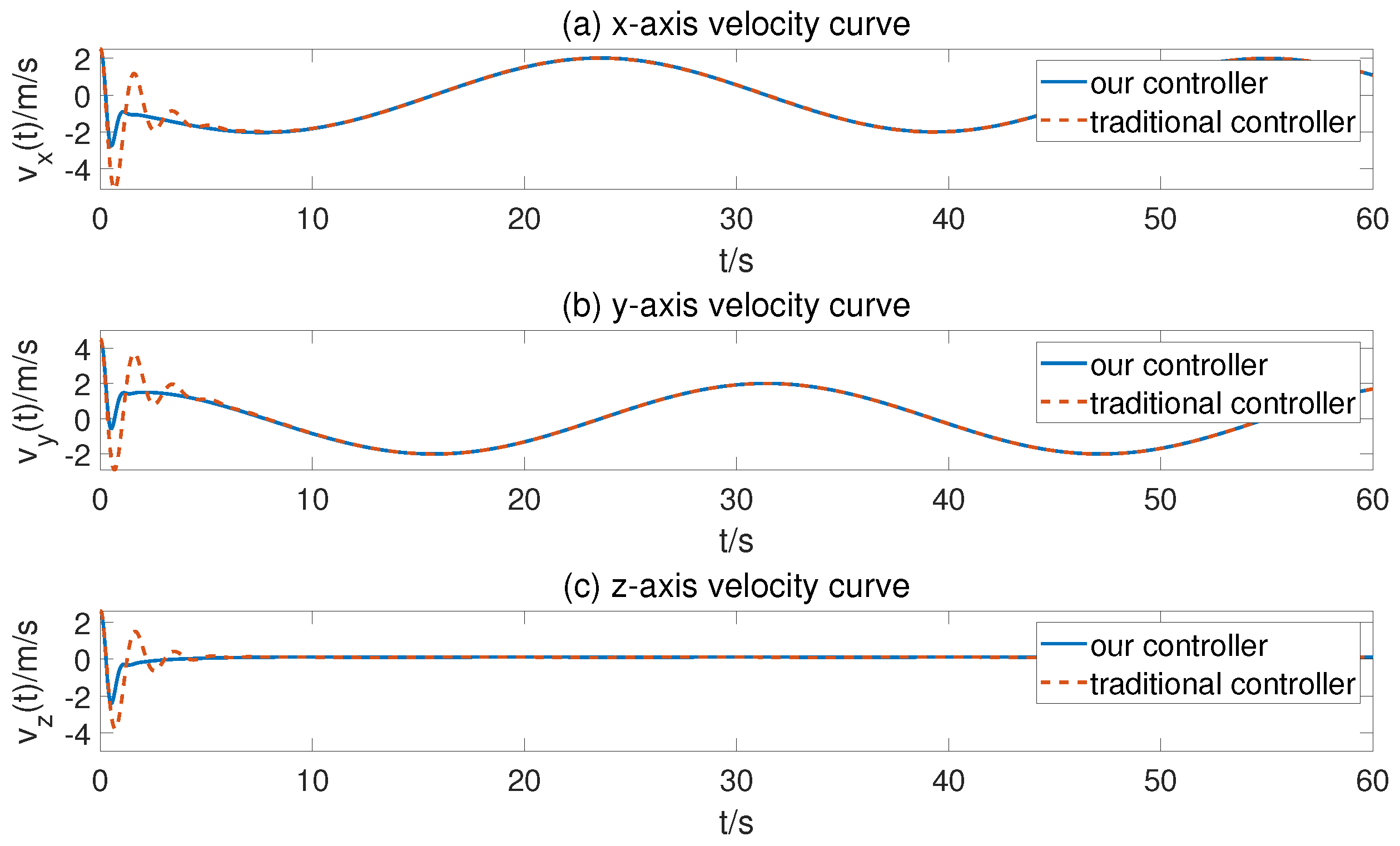
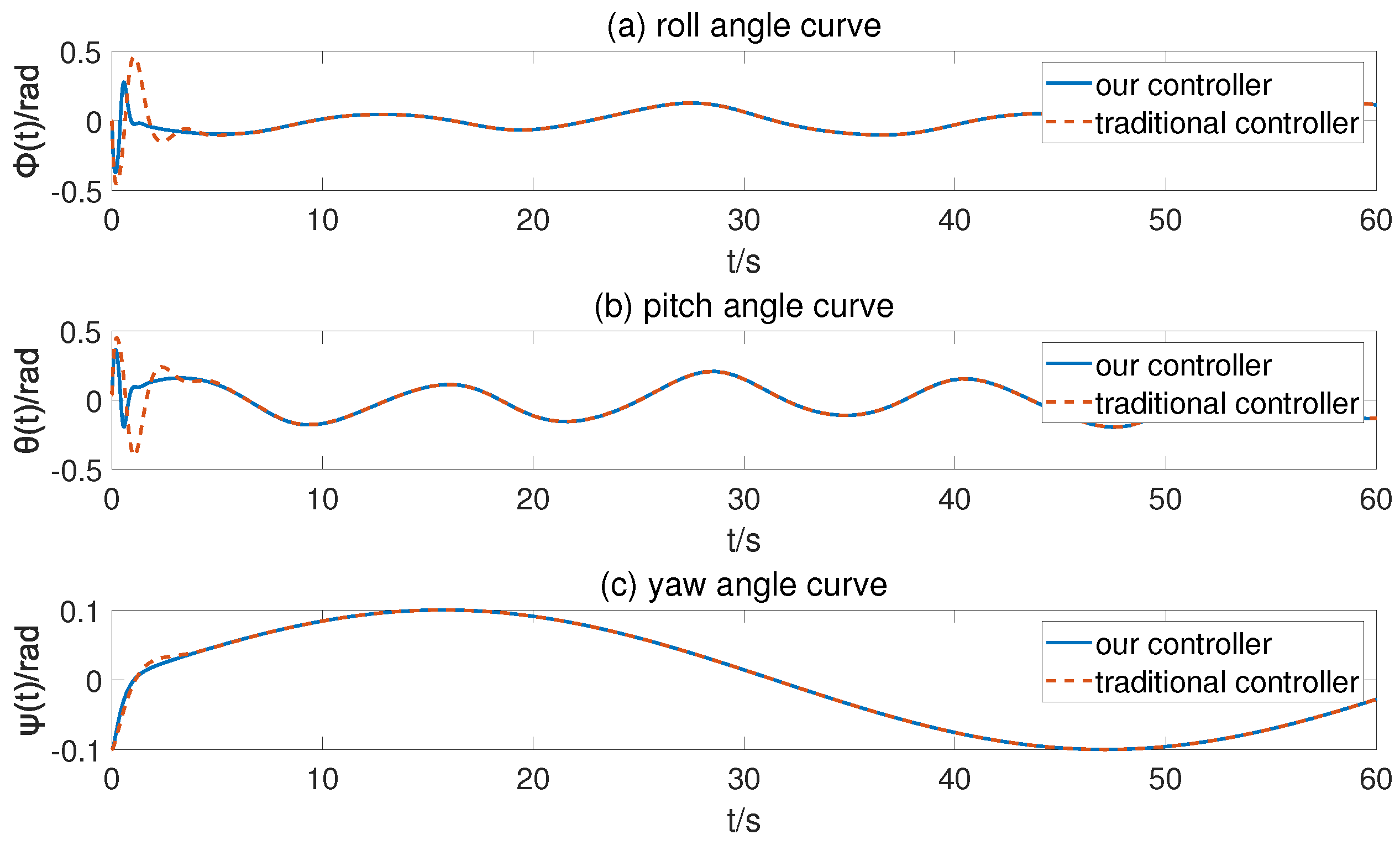
5. Numerical Simulation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Raptis, I.A.; Valavanis, K.P. Linear and Nonlinear Control of Small-Scale Unmanned Helicopters; Springer: London, UK, 2011. [Google Scholar]
- Ren, B.; Ge, S.S.; Chen, C.; Fua, C.H.; Lee, T. Modeling, Control and Coordination of Helicopter Systems; Springer: New York, NY, USA, 2013. [Google Scholar]
- Huang, M.; Xu, D.; He, L.; Zhu, Q.; Wang, L. Development overview and key technologies of high speed hybrid helicopter with single main rotor. J. Aerosp. Power 2021, 36, 1156–1168. [Google Scholar]
- Zhang, S.; Ma, Z.; Zhang, H. Research on slung-load swing control method in helicopter suspension flight. Adv. Aeronaut. Sci. Eng. 2022, 13, 57–63. [Google Scholar]
- Sebastian, T.; Janusz, N.; Przemyslaw, B. Helicopter Control During Landing on a Moving Confined Platform. IEEE Access 2020, 8, 107315–107325. [Google Scholar]
- Xian, B.; Gu, X.; Pan, X. Data driven adaptive robust attitude control for a small size unmanned helicopter. Mech. Syst. Signal Process. 2022, 177, 109205. [Google Scholar] [CrossRef]
- Hendra, G.H.; Yoonsoo, K. Flight envelope estimation for helicopters under icing conditions via the zonotopic reachability analysis. Aerosp. Sci. Technol. 2020, 102, 105859. [Google Scholar]
- Uwe, N. Design of a disturbance observer based on an already existing observer without disturbance model. AT-Automatisierungstechnik 2022, 70, 134–141. [Google Scholar]
- Wang, Y.; Liu, J.; Chen, Z.; Sun, M.; Sun, Q. On the stability and convergence rate analysis for the nonlinear uncertain systems based upon active disturbance rejection control. Int. J. Robust Nonlinear Control 2020, 30, 5728–5750. [Google Scholar] [CrossRef]
- Wang, K.; Liu, X.; Jing, Y. Robust finite-time H-infinity congestion control for a class of AQM network systems. Neural Comput. Appl. 2021, 33, 3105–3112. [Google Scholar] [CrossRef]
- Dong, L.; Wei, X.; Hu, X.; Zhang, H.; Han, J. Disturbance observer-based elegant anti-disturbance saturation control for a class of stochastic systems. Int. J. Control 2020, 93, 2859–2871. [Google Scholar] [CrossRef]
- Hu, X.; Gong, Q. Composite disturbance observer-based backstepping stabilisation for 3-DOF ship-borne platform with unknown disturbances. Ships Offshore Struct. 2022; early Access. [Google Scholar] [CrossRef]
- Hou, L.; Sun, H. Anti-disturbance attitude control of flexible spacecraft with quantized states. Aerosp. Sci. Technol. 2020, 99, 105760. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, Z.; Yi, Y. Anti-Disturbance Fault-Tolerant Sliding Mode Control for Systems with Unknown Faults and Disturbances. Electronics 2021, 10, 1487. [Google Scholar] [CrossRef]
- Yao, W.; Liu, L.; Guo, Y.; Guo, J. Anti-disturbance control of free floating flexible space manipulator. J. Nanjing Univ. Sci. Technol. 2021, 45, 63–70. [Google Scholar]
- Li, Y.; Chen, M.; Ge, S.S.; Li, D. Anti-disturbance control for attitude and altitude systems of the helicopter under random disturbances. Aerosp. Sci. Technol. 2020, 96, 105561. [Google Scholar] [CrossRef]
- Li, Y.; Chen, M.; Shi, P.; Li, T. Stochastic anti-disturbance flight control for helicopter systems with switching disturbances under Markovian parameters. IEEE Trans. Aerosp. Electron. Syst. 2023, 1–13. [Google Scholar] [CrossRef]
- Shen, L.; Wang, H.; Yue, H. Prescribed Performance Adaptive Fuzzy Control for Affine Nonlinear Systems With State Constraints. IEEE Trans. Fuzzy Syst. 2022, 30, 5351–5360. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Y.; Chen, A.; Tong, S.; Chen, C. Integral Barrier Lyapunov function-based adaptive control for switched nonlinear systems. Sci. China Inf. Sci. 2020, 63, 132203. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, D.; Qian, M. Decentralised adaptive tracking control for the interconnected nonlinear systems with asymmetric full state dynamic constraints. Int. J. Control 2022, 95, 2840–2853. [Google Scholar] [CrossRef]
- Shao, X.; Ye, D. Neuroadaptive deferred full-state constraints control without feasibility conditions for uncertain nonlinear EASSs. J. Frankl. Inst. Eng. Appl. Math. 2022, 359, 2810–2832. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, S. Adaptive stabilization of state-constrained uncertain nonholonomic system via dynamic surface control. Int. J. Adapt. Control Signal Process. 2021, 35, 1649–1661. [Google Scholar] [CrossRef]
- Hua, C.; Meng, R.; Li, K. Hybrid threshold strategy-based adaptive tracking control for nonlinear stochastic systems with full-state constraints. Int. J. Robust Nonlinear Control 2020, 30, 6189–6206. [Google Scholar] [CrossRef]
- Xiong, H.; Zhang, H.; Qin, K.; Wang, S.; Li, B. Disturbance observer based fixed-tim integrated attitude-position control for the UAV. Manuf. Autom. 2023, 45, 149–155. [Google Scholar]
- Chen, M.; Chen, W. Disturbance-observer-based robust control for time delay uncertain systems. Int. J. Control. Autom. Syst. 2010, 8, 445–453. [Google Scholar] [CrossRef]
- Ren, B.; Ge, S.; Tee, K.; Lee, T. Adaptive neural control for output feedback nonlinear systems using a barrier Lyapunov function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar]
- Chen, M.; Tao, G.; Jiang, B. Dynamic surface control using neural networks for a class of uncertain nonlinear systems with iuput saturation. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 2086–2097. [Google Scholar] [CrossRef]
- Sun, X.; Fang, Y.; Sun, N. Backstepping-based adaptive attitude and height control of a small-scale unmanned helicopter. Control. Theory Appl. 2012, 29, 381–388. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (Unit) | Parameter Description | Parameter (Unit) | Parameter Description |
|---|---|---|---|
| kg | quality of the helicopter | moment of rotation | |
| moment of rotation | moment of rotation | ||
| pitch moment intensity factor | rolling moment intensity factor | ||
| main rotor torque factor | main rotor torque factor | ||
| m | distance between the center of the main rotor and the x-axis of the helicopter’s center of gravity | m | distance between the center of the main rotor and the z-axis of the helicopter’s center of gravity |
| m | distance between the center of the tail and the x-axis of the helicopter’s center of gravity | m | distance between the center of the tail and the z-axis of the helicopter’s center of gravity |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Huang, Y.; Liu, H.; Li, D. Full State Constrained Flight Tracking Control for Helicopter Systems with Disturbances. Aerospace 2023, 10, 471. https://doi.org/10.3390/aerospace10050471
Li Y, Huang Y, Liu H, Li D. Full State Constrained Flight Tracking Control for Helicopter Systems with Disturbances. Aerospace. 2023; 10(5):471. https://doi.org/10.3390/aerospace10050471
Chicago/Turabian StyleLi, Yankai, Yulong Huang, Han Liu, and Dongping Li. 2023. "Full State Constrained Flight Tracking Control for Helicopter Systems with Disturbances" Aerospace 10, no. 5: 471. https://doi.org/10.3390/aerospace10050471
APA StyleLi, Y., Huang, Y., Liu, H., & Li, D. (2023). Full State Constrained Flight Tracking Control for Helicopter Systems with Disturbances. Aerospace, 10(5), 471. https://doi.org/10.3390/aerospace10050471