
Rotating Machinery State Recognition Based on Mel-Spectrum and Transfer Learning


 , ,
, , 
Abstract
:1. Introduction
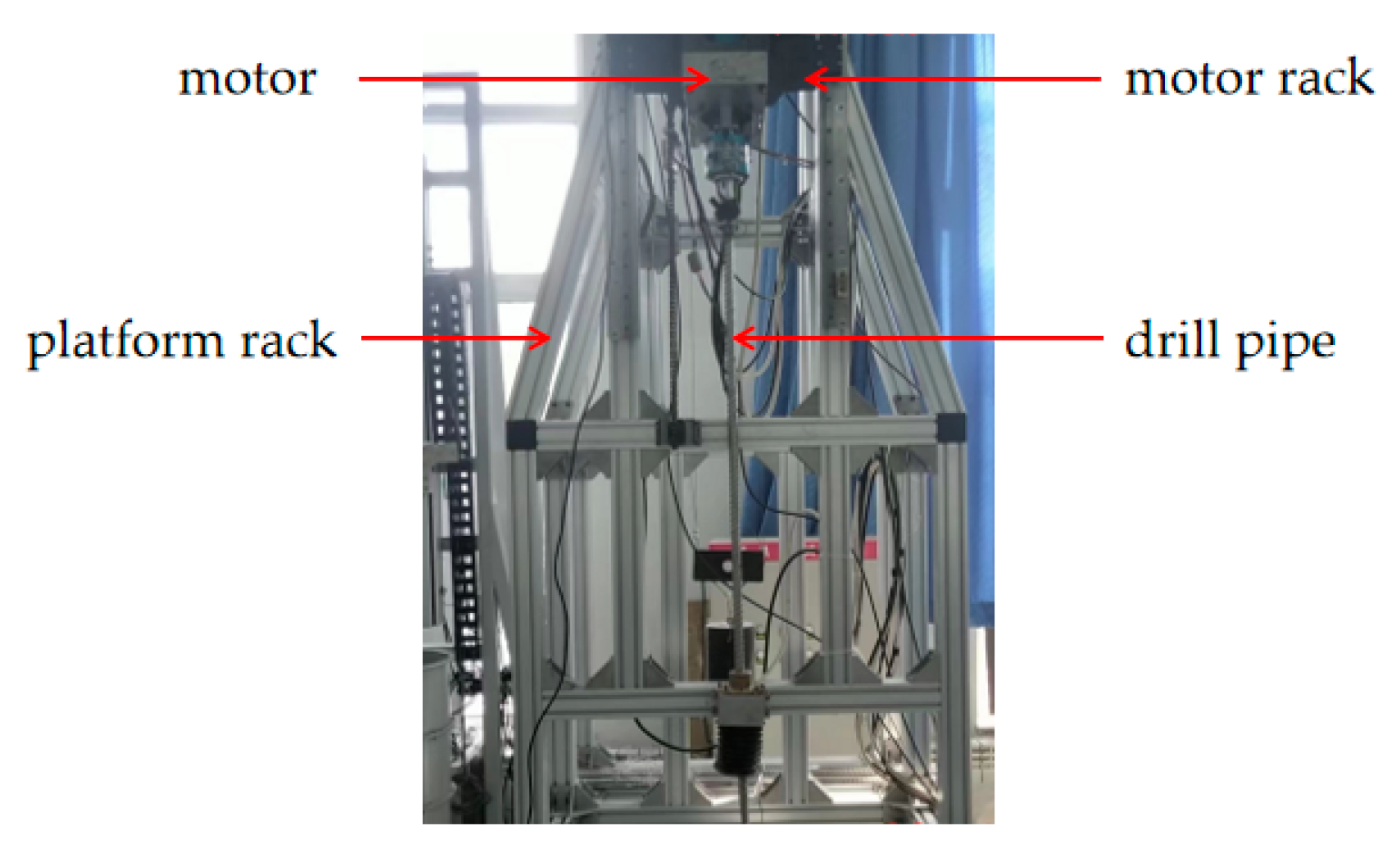
2. Data Collection and Preprocessing
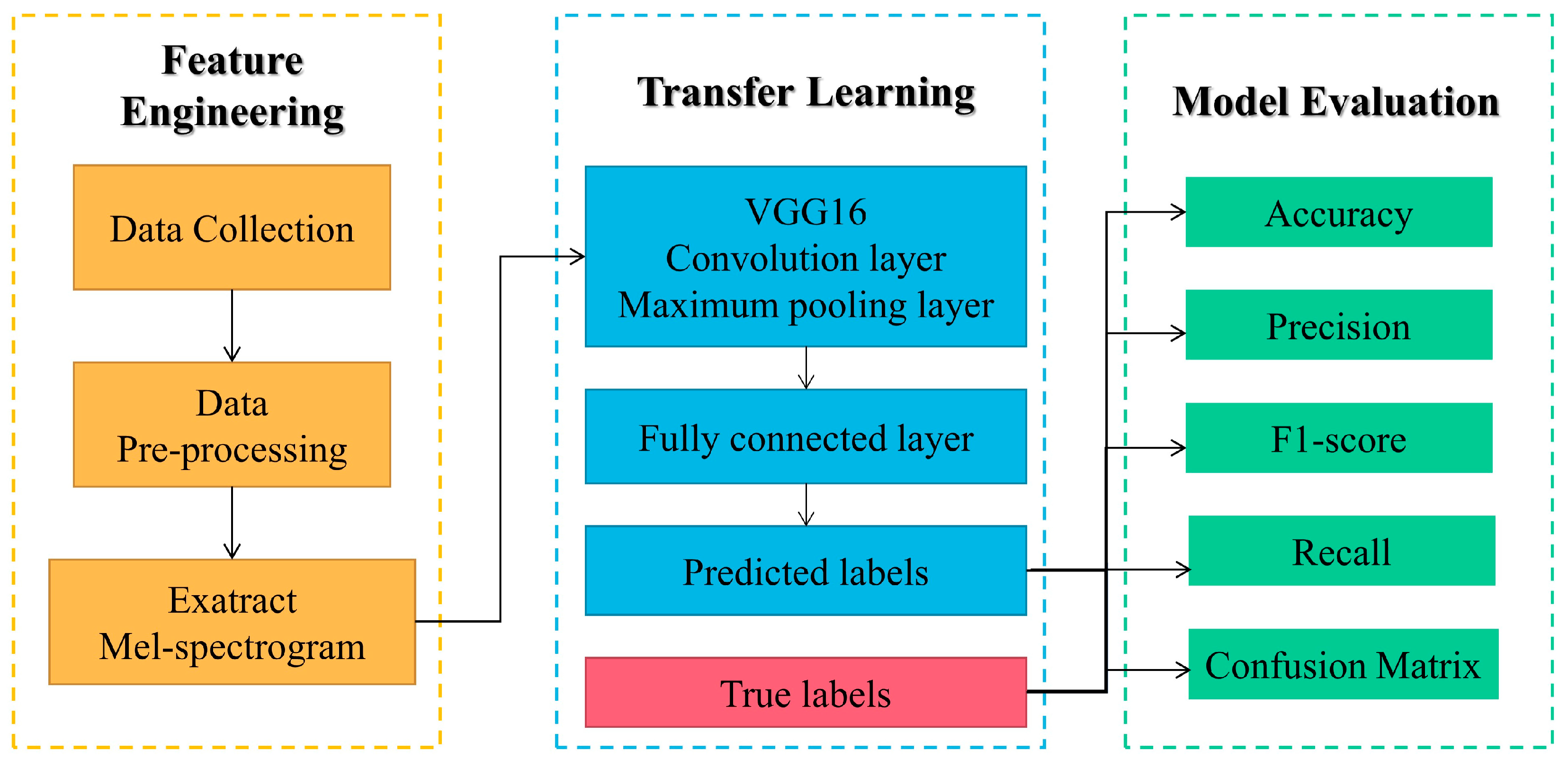
3. Feature Extraction and Recognition
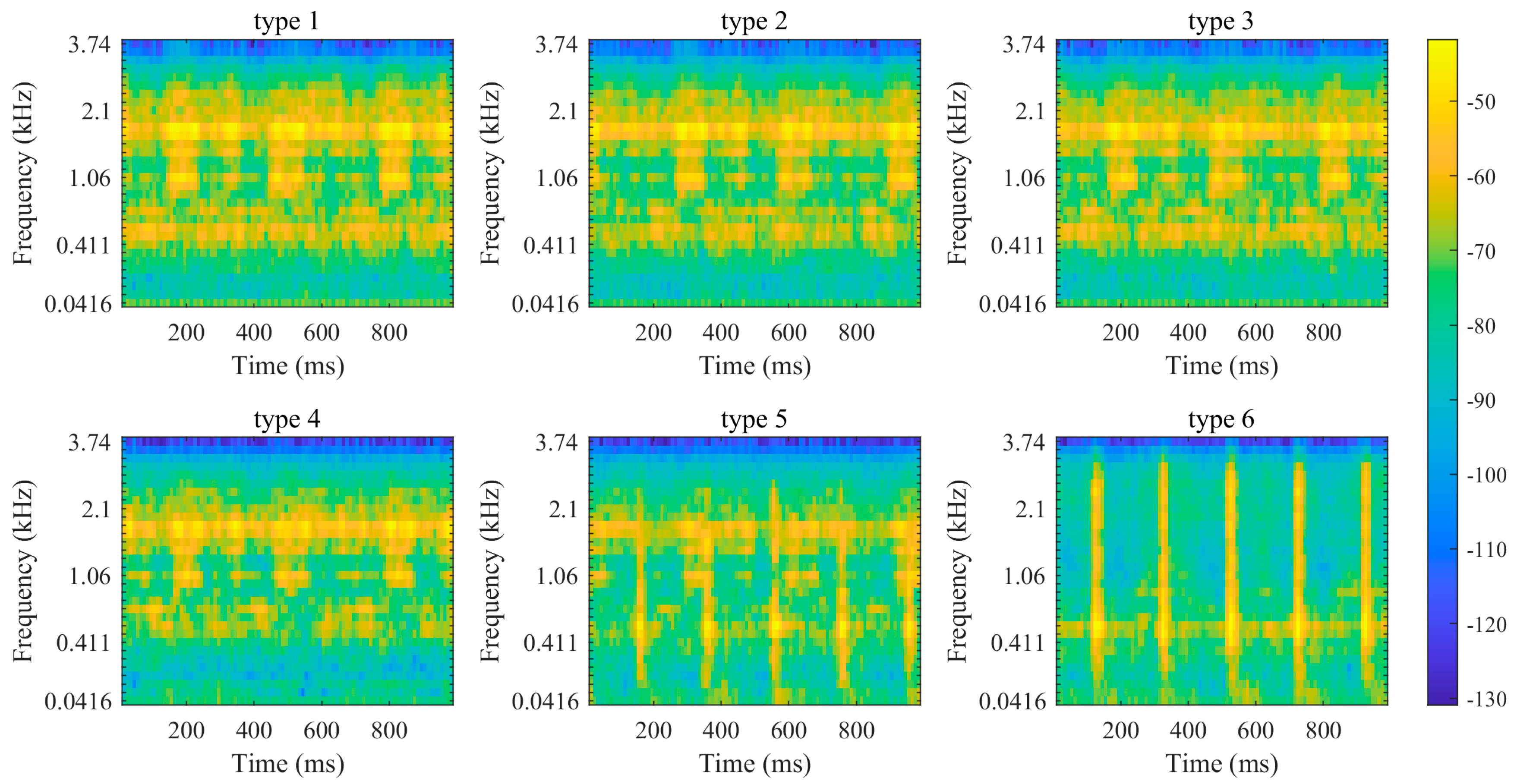
3.1. Mel-Spectrum
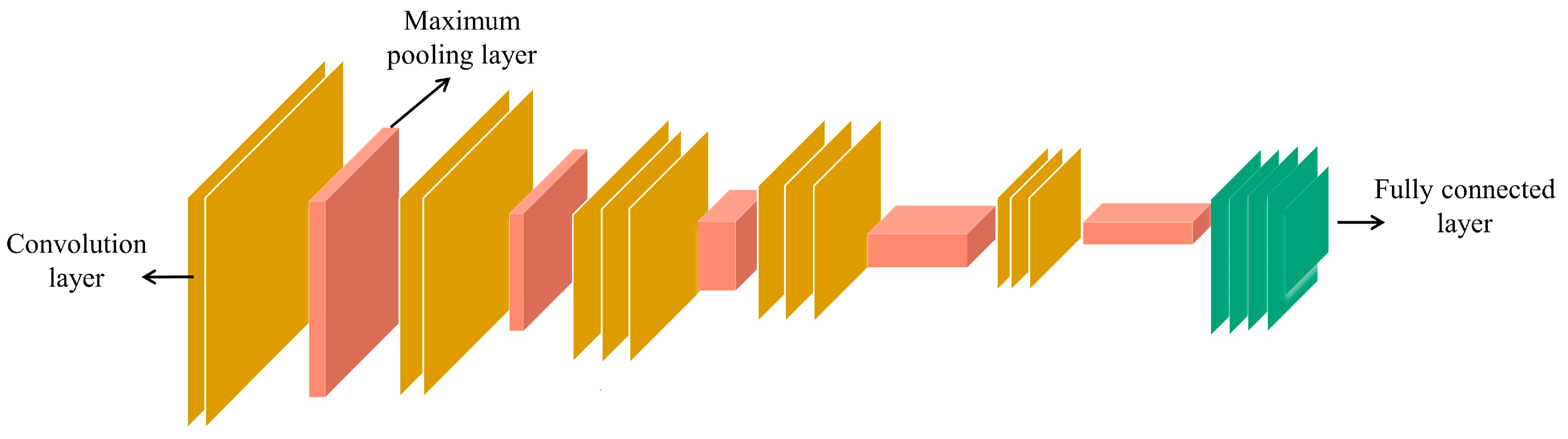
3.2. Transfer Learning
3.3. Recognition Process
4. Experimental Results
5. Comparative Study
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sreejith, B.; Verma, A.K.; Srividya, A. Fault diagnosis of rolling element bearing using time-domain features and neural networks. In Proceedings of the 2008 IEEE Region 10 and the Third International Conference on Industrial and Information Systems, Kharagpur, India, 8–10 December 2008; pp. 1–6. [Google Scholar]
- Doguer, T.; Strackeljan, J. Vibration Analysis using Time Domain Methods for the Detection of small Roller Bearing Defects. In Proceedings of the SIRM 2009-8th International Conference on Vibrations in Rotating Machines, Vienna, Austria, 23–25 February 2009; p. 16. [Google Scholar]
- Mishra, C.; Samantaray, A.K.; Chakraborty, G. Rolling element bearing fault diagnosis under slow speed operation using wavelet de-noising. Measurement 2017, 103, 77–86. [Google Scholar] [CrossRef]
- Ibarra-Zarate, D.; Tamayo-Pazos, O.; Vallejo-Guevara, A. Bearing fault diagnosis in rotating machinery based on cepstrum pre-whitening of vibration and acoustic emission. Int. J. Adv. Manuf. Technol. 2019, 104, 4155–4168. [Google Scholar] [CrossRef]
- Gao, H.; Liang, L.; Chen, X.; Xu, G. Feature extraction and recognition for rolling element bearing fault utilizing short-time Fourier transform and non-negative matrix factorization. Chin. J. Mech. Eng. 2014, 28, 96–105. [Google Scholar] [CrossRef]
- Ben Ali, J.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar] [CrossRef]
- Zhang, S.; Zhou, J.; Wang, E.; Zhang, H.; Gu, M.; Pirttikangas, S. State of the art on vibration signal processing towards data-driven gear fault diagnosis. IET Collab. Intell. Manuf. 2022, 4, 249–266. [Google Scholar] [CrossRef]
- Anwarsha, A.; Narendiranath Babu, T. Recent advancements of signal processing and artificial intelligence in the fault detection of rolling element bearings: A review. J. Vibroeng. 2022, 24, 1027–1055. [Google Scholar] [CrossRef]
- Dong, S.; Xu, X.; Chen, R. Application of fuzzy C-means method and classification model of optimized K-nearest neighbor for fault diagnosis of bearing. J. Braz. Soc. Mech. Sci. Eng. 2015, 38, 2255–2263. [Google Scholar] [CrossRef]
- Pandya, D.H.; Upadhyay, S.H.; Harsha, S.P. Fault diagnosis of rolling element bearing with intrinsic mode function of acoustic emission data using APF-KNN. Expert Syst. Appl. 2013, 40, 4137–4145. [Google Scholar] [CrossRef]
- Li, Y.; Xu, M.; Wei, Y.; Huang, W. A new rolling bearing fault diagnosis method based on multiscale permutation entropy and improved support vector machine based binary tree. Measurement 2016, 77, 80–94. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, S.; Dai, J.; Tang, J. A Novel Bearing Fault Diagnosis Methodology Based on SVD and One-Dimensional Convolutional Neural Network. Shock. Vib. 2020, 2020, 1850286. [Google Scholar] [CrossRef]
- Khorram, A.; Khalooei, M.; Rezghi, M. End-to-end CNN + LSTM deep learning approach for bearing fault diagnosis. Appl. Intell. 2021, 51, 736–751. [Google Scholar] [CrossRef]
- Wang, L.-H.; Zhao, X.-P.; Wu, J.-X.; Xie, Y.-Y.; Zhang, Y.-H. Motor Fault Diagnosis Based on Short-time Fourier Transform and Convolutional Neural Network. Chin. J. Mech. Eng. 2017, 30, 1357–1368. [Google Scholar] [CrossRef]
- Li, C.; Zhang, S.; Qin, Y.; Estupinan, E. A systematic review of deep transfer learning for machinery fault diagnosis. Neurocomputing 2020, 407, 121–135. [Google Scholar] [CrossRef]
- Park, J.; Jung, Y. A review and comparison of convolution neural network models under a unified framework. Commun. Stat. Appl. Methods 2022, 29, 161–176. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Rawat, W.; Wang, Z. Deep convolutional neural networks for image classification: A comprehensive review. Neural Comput. 2017, 29, 2352–2449. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | State | Description |
|---|---|---|
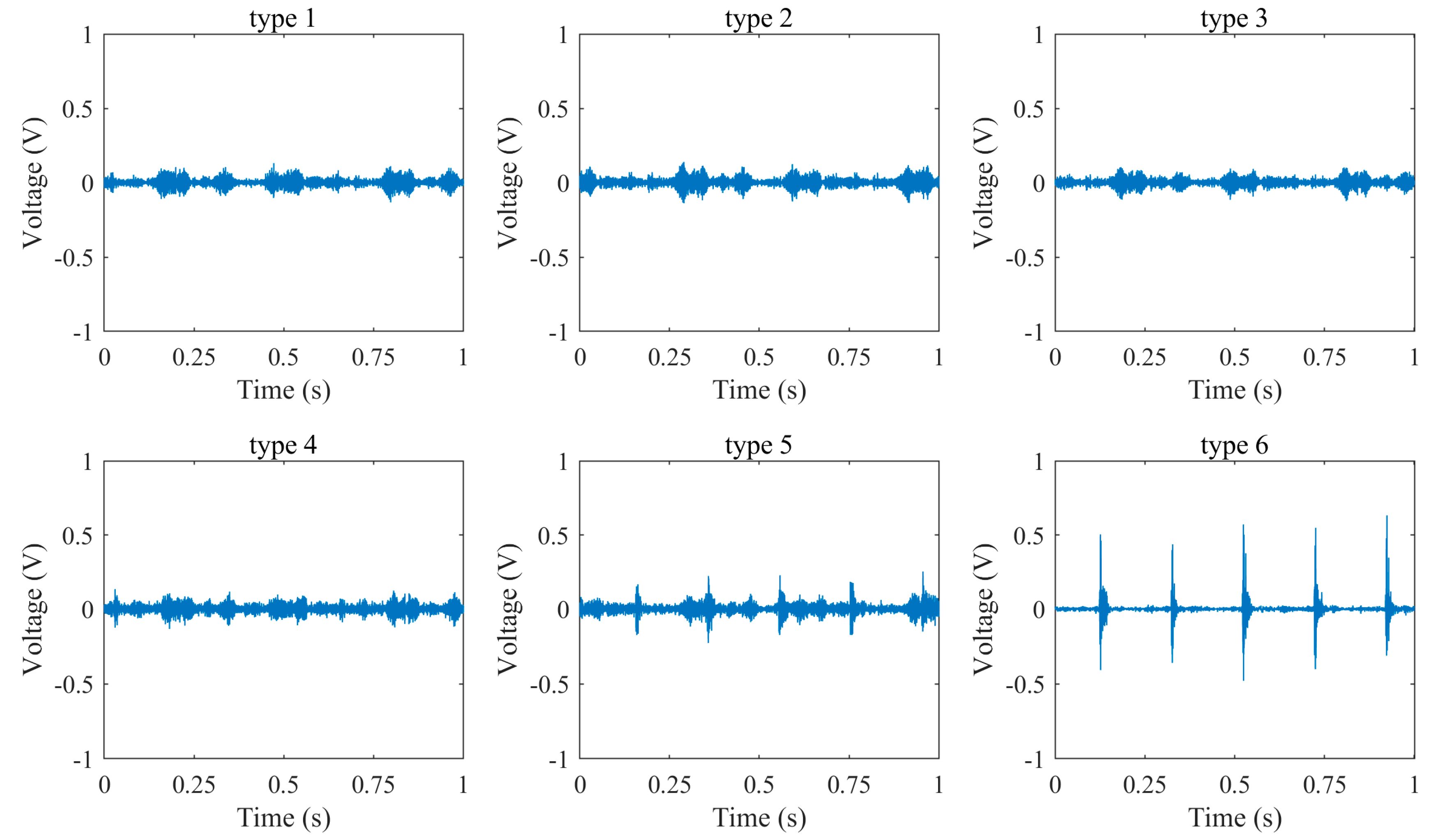
| 1 | Idling | The drill rotates but does not touch the soil. |
| 2 | Idling + knocking platform rack | Knock the surface of the test bench while idling to simulate disturbances to the support facility. |
| 3 | Idling + knocking motor rack | Knock the motor rack while idling to simulate a motor being disturbed |
| 4 | Rotation (120 rpm) | The drill enters the soil and rotates smoothly, and advances at a speed of 120 rpm |
| 5 | Rotation (120 rpm) + Impact | Add impact based on 120 rpm rotation to simulate accelerated digging state. |
| 6 | Rotation (60 rpm) + Impact | Add impact based on 60 rpm rotation |
| Indicators | Equation |
|---|---|
| accuracy | (TP + TN)/(TP + TN + FP + FN) |
| precision | TP/(TP + FP) |
| recall | TP/(TP + FN) |
| f1-score | 2/(1/precision + 1/recall) |
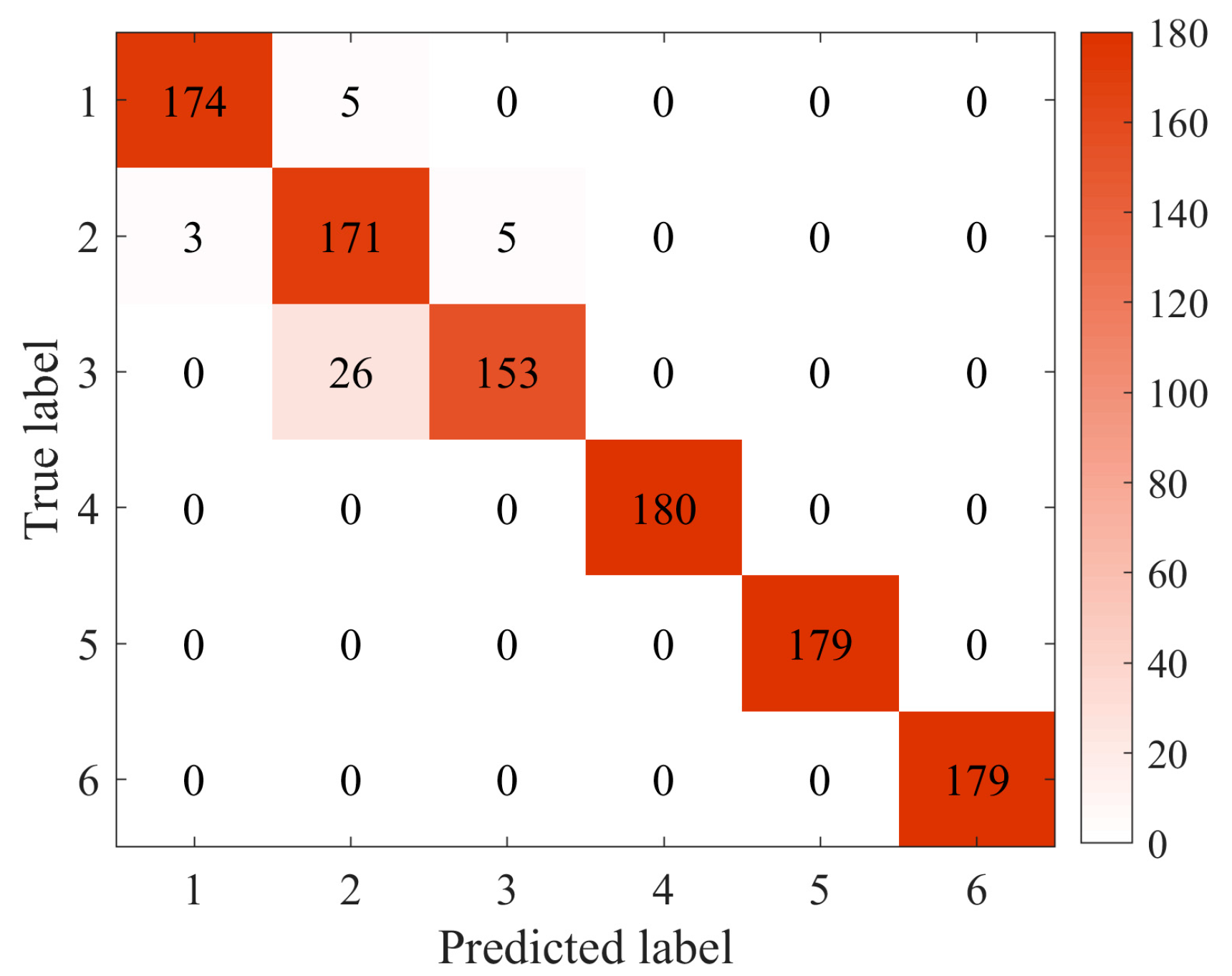
| Type | State | Precision | Recall | F1-Score |
|---|---|---|---|---|
| 1 | Idling | 98.31% | 97.21% | 97.75% |
| 2 | Idling + knocking platform rack | 84.65% | 95.53% | 89.76% |
| 3 | Idling + knocking motor rack | 96.84% | 85.47% | 90.80% |
| 4 | Rotation (120 rpm) | 100.00% | 100.00% | 100.00% |
| 5 | Rotation (120 rpm) + Impact | 100.00% | 100.00% | 100.00% |
| 6 | Rotation (60 rpm) + Impact | 100.00% | 100.00% | 100.00% |
| Type | VGG16 | VGG19 | MobileNet | MobileNetV2 | Xception | InceptionV3 |
|---|---|---|---|---|---|---|
| 1 | 97.75% | 97.02% | 96.48% | 86.72% | 95.21% | 96.38% |
| 2 | 89.76% | 87.86% | 90.62% | 79.66% | 84.40% | 87.94% |
| 3 | 90.80% | 86.08% | 90.36% | 85.98% | 86.93% | 89.74% |
| 4 | 100.00% | 99.45% | 100.00% | 100.00% | 99.72% | 99.72% |
| 5 | 100.00% | 100.00% | 100.00% | 100.00% | 100.00% | 100.00% |
| 6 | 100.00% | 100.00% | 100.00% | 100.00% | 100.00% | 100.00% |
| Accuracy | 96.37% | 95.16% | 96.28% | 92.09% | 94.33% | 95.63% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Lu, Z.; Tang, J.; Zhang, W.; Tian, Y.; Cui, Z.; Jiang, F.; Li, H.; Jiang, S. Rotating Machinery State Recognition Based on Mel-Spectrum and Transfer Learning. Aerospace 2023, 10, 480. https://doi.org/10.3390/aerospace10050480
Li F, Lu Z, Tang J, Zhang W, Tian Y, Cui Z, Jiang F, Li H, Jiang S. Rotating Machinery State Recognition Based on Mel-Spectrum and Transfer Learning. Aerospace. 2023; 10(5):480. https://doi.org/10.3390/aerospace10050480
Chicago/Turabian StyleLi, Fan, Zixiao Lu, Junyue Tang, Weiwei Zhang, Yahui Tian, Zhongyu Cui, Fei Jiang, Honglang Li, and Shengyuan Jiang. 2023. "Rotating Machinery State Recognition Based on Mel-Spectrum and Transfer Learning" Aerospace 10, no. 5: 480. https://doi.org/10.3390/aerospace10050480
APA StyleLi, F., Lu, Z., Tang, J., Zhang, W., Tian, Y., Cui, Z., Jiang, F., Li, H., & Jiang, S. (2023). Rotating Machinery State Recognition Based on Mel-Spectrum and Transfer Learning. Aerospace, 10(5), 480. https://doi.org/10.3390/aerospace10050480