

Review of Launch Vehicle Engine PHM Technology and Analysis Methods Research


Abstract
:1. Introduction
2. Intelligent Launch Vehicle Engine Fault Detection
2.1. Launch Vehicle Engine Failure Analysis
2.2. Fault Detection Methods
2.2.1. Mathematical Modeling
2.2.2. Signal Processing

2.2.3. Knowledge Learning
2.2.4. Digital Twin
2.2.5. Hybrid Fault Detection
3. Intelligent Launch Vehicle Engine Health Management
3.1. Health Assessment
3.1.1. Quantitative Methods
3.1.2. Qualitative Methods
3.2. Health Management
3.2.1. Design Requirements
3.2.2. Operation Process
4. A Multilayered and Multifactorial Health Assessment Method for Launch Vehicle Engine under Vibration Conditions
4.1. Instance Overview
4.2. Instance Scheme
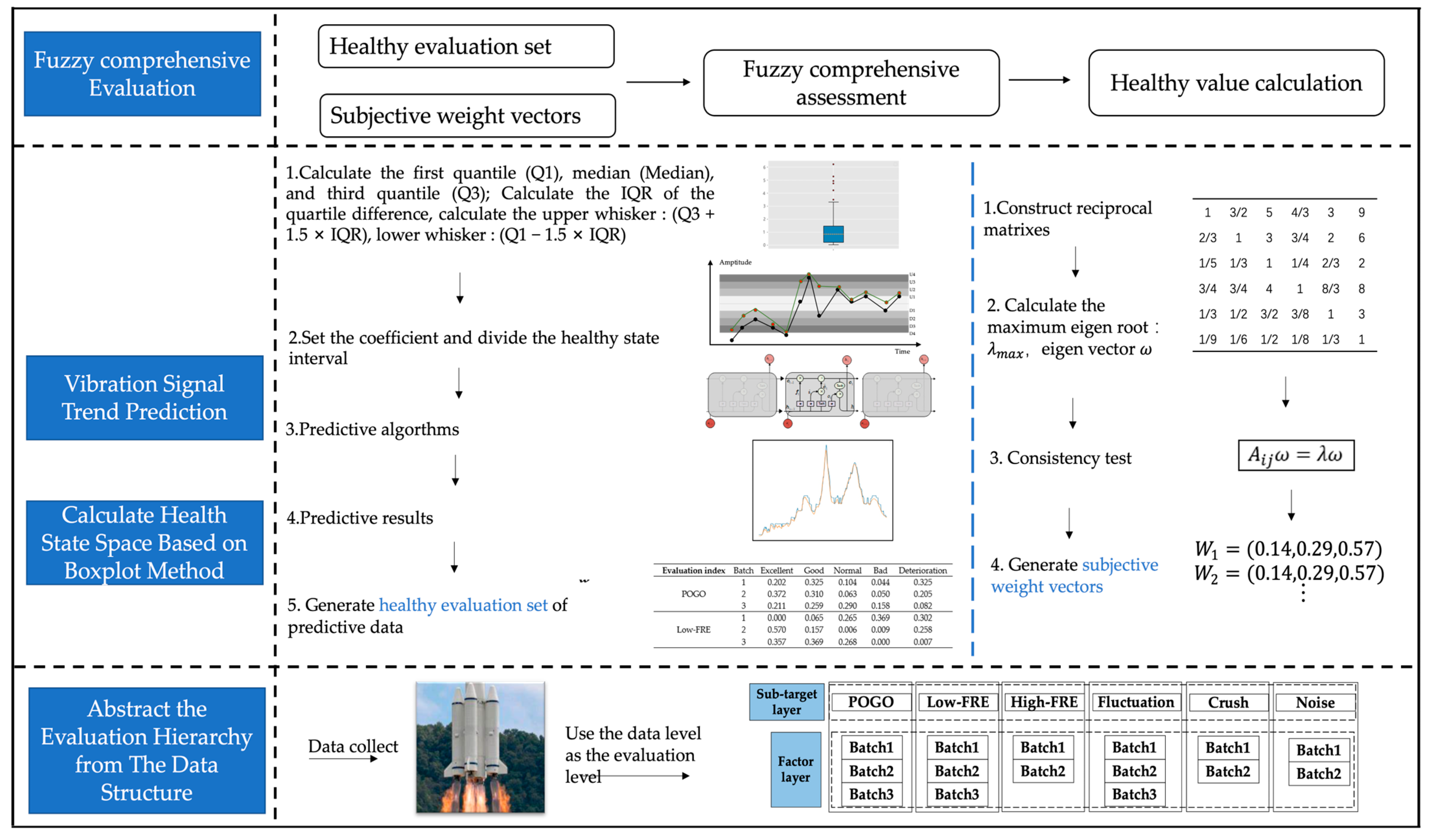
4.3. Instance Steps
- LSTM prediction error indicators (RMSE) was shown in Table 2.
- 2.
- The results of the limit value calculation based on the box-line diagram method were shown in Table 3.
- 3.
- The evaluation index is thus set to = {excellent, good, normal, bad, deterioration}. The coefficient of the specified IQR is divided into five intervals, and the score of each category is . The probabilities of statistical prediction data in the intervals of health states are presented in the following Table 4.
- 4.
- The set of weights is shown below:
- 5.
- The fuzzy integrated assessment result is: .
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Johnson, S.B.; Gormley, T.; Kessler, S.; Mott, C.; Patterson-Hine, A.; Reichard, K.; Scandura, P., Jr. (Eds.) System Health Management: With Aerospace Applications; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Kolcio, K.; Helmicki, A.; Jaweed, S. Propulsion system modelling for condition monitoring and control. In Proceedings of the II-Applicationto the SSME//30th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Indianapolis, IN, USA, 27–29 June 1994. [Google Scholar]
- Hawman, M.W. Health monitoring system for the SSME-Program overview. In Proceedings of the 26th Joint Propulsion Conference, Orlando, FL, USA, 16–18 July 1990. [Google Scholar]
- Hawman, M.W. Framework for a Space Shuttle Main Engine Health Monitoring System; NASA Contractor Report; NASA: Washington, DC, USA, 1990; p. 185224. [Google Scholar]
- Hawman, M.W. Health Management System for Rocket Engines; NASA Contractor Report; NASA: Washington, DC, USA, 1990; p. 185223. [Google Scholar]
- Tulpule, S.; Galinaitis, W.S. Health monitoring system for the SSME-fault detection algorithms. In Proceedings of the AIAA 26th Joint Propulsion Conference, Orlando, FL, USA, 16–18 July 1990. [Google Scholar]
- Figueroa, F.; Walker, M.; Underwood, L.W. NASA Platform for Autonomous Systems (NPAS). In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Srivastava, A.N.; Buntine, W. Predicting Engine Parameters Using the Optic Spectrum of the Space Shuttle Main Engine Exhaust Plume. In Proceedings of the 10th Computing in Aerospace Conference, San Antonio, TX, USA, 28–30 March 1995. [Google Scholar]
- Jana, D.; Patil, J.; Herkal, S.; Nagarajaiah, S.; Duenas-Osorio, L. CNN and Convolutional Autoencoder (CAE) based real-time sensor fault detection, localization, and correction. Mech. Syst. Signal Process. 2022, 169, 108723. [Google Scholar] [CrossRef]
- Jana, D.; Nagarajaiah, S. Data-driven full-field vibration response estimation from limited measurements in real-time using dictionary learning and compressive sensing. Eng. Struct. 2023, 275, 115280. [Google Scholar] [CrossRef]
- Wu, J. Liquid-Propellant Rocket Engines Health-Monitoring—A Survey. Acta Astronaut. 2005, 56, 347–356. [Google Scholar] [CrossRef]
- Davidson, M.; Stephens, J. Advanced Health Management System for the Space Shuttle Main Engine. In Proceedings of the Fort Lauderdale: 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Lauderdale, FL, USA, 11–14 July 2004. [Google Scholar]
- Chiba, K.; Kanazaki, M.; Nakamiya, M.; Kitagawa, K.; Shimada, T. Diversity of design knowledge for launch vehicle in view of fuels on hybrid rocket engine. J. Adv. Mech. Des. Syst. Manuf. 2014, 8, 1–14. [Google Scholar] [CrossRef]
- Chen, H.; Li, B.; Zhang, E.Z.; Tan, Y.H. Rotating Cavitation of the High-Speed Rotational Inducer of LPRE. J. Propuls. Technol. 2009, 30, 390–395. [Google Scholar]
- Nemeth, E.D.; Anderson, R.; Maram, J.; Norman, A.; Merrill, W. An advanced intelligent control system framework. In Proceedings of the 28th Joint Propulsion Conference and Exhibit, Nashville, TN, USA, 6–8 July 1992. [Google Scholar]
- Cha, J.; Ko, S.; Park, S.Y.; Jeong, E. Fault detection and diagnosis algorithms for transient state of an open-cycle liquid rocket engine using nonlinear Kalman filter methods. Acta Astronaut. 2018, 163, 147–156. [Google Scholar] [CrossRef]
- Xue, W.; Zhang, Q.; Wu, X.P. Based on the ARMA Model for the Liquid Rocket Propulsion Fault Detection. Comput. Meas. Control. 2019, 27, 4–7. [Google Scholar]
- Reilly, D.O. System for Anomaly and Failure Detection (SAFD) System Development (Final Report); NASA: Washington, DC, USA, 1993; p. 193907. [Google Scholar]
- Biggs, R. A Probabilistic Risk Assessment for the Space Shuttle Main Engine with a Turbomachinery Vibration Monitor Cutoff System. In Proceedings of the 26th Joint Propulsion Conference, Orlando, FL, USA, 16–18 July 1990; p. 2712. [Google Scholar]
- Fiorucci, T.R.; Lakin, D.R.; Reynolds, T.D. Advanced Engine Health Management Applications of the SSME Real-time Vibration Monitoring System. In Proceedings of the 36th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Las Vegas, NV, USA, 24–28 July 2000; p. 3622. [Google Scholar]
- Zhang, Z.; Chen, H.; Gao, Y.; Zhang, H. Review on Fault Diagnosis Technology of Liquid Rocket Engine. J. Propuls. Technol. 2022, 6, 43. [Google Scholar]
- Wan, F.; Xu, Q.; Li, S. Vibration analysis of cracked rotor sliding bearing system with rotor–stator rubbing by harmonic wavelet transform. J. Sound Vib. 2004, 271, 507–518. [Google Scholar] [CrossRef]
- Li, N.; Zhang, Y.Y.; Li, Y.J. A diagnosis algorithm for abnormal data of spin-stabilized satellite attitude sensors. J. Astronaut. 2011, 32, 1327–1332. [Google Scholar]
- Kim, S.; Jung, I.; Kim, Y.; Park, C. Hybrid fault detection and isolation techniques for aircraft inertial measurement sensors. In Proceedings of the AlAA Guidance, Navigation, and Control Conference and Exhibit, Providence, GSA, Reno, Nevada, 5–8 January 2004; Volume 8, pp. 16–19. [Google Scholar]
- Ji, S.; Han, B.; Zhang, Z.; Wang, J.; Lu, B.; Yang, J.; Jiang, X. Parallel sparse filtering for intelligent fault diagnosis using acoustic signal processing. Neurocomputing 2021, 462, 466–477. [Google Scholar] [CrossRef]
- Dai, X.; Gao, Z. From Model, Signal to Knowledge: A Data-Driven Perspective of Fault Detection and Diagnosis. IEEE Trans. Ind. Inform. 2013, 9, 2226–2238. [Google Scholar] [CrossRef]
- Palowitch, B.L.; Kramer, M.A. The Application of a Knowledge-Based Expert System to Chemical Plant Fault Diagnosis. In Proceedings of the 1985 American Control Conference, Boston, MA, USA, 19–21 June 1985; pp. 646–651. [Google Scholar]
- Wescourt, K.; Powell, C.; Pickering, C.; Whitehead, D. Generic Expert Systems for Equipment Fault Diagnosis. IEEE Nineteeth Asilomar Conf. Circuits Syst. Comput. 1985, 12, 489–493. [Google Scholar]
- Qi, Y.; Jian, W.; Zhang, G. A Fault Diagnosis Expert System Based on Aircraft Parameters. In Proceedings of the Web Information System & Application Conference, Rome, Italy, 23–25 April 2016. [Google Scholar]
- Li, B.; Zhao, Y.P. Simultaneous fault diagnosis for aircraft engine using multi-label learning. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2022, 236, 1355–1371. [Google Scholar] [CrossRef]
- Zhang, P.Y.; Shu, S.; Zhou, M.C. An online fault detection model and strategies based on SVM-grid in clouds. IEEE/CAA J. Autom. Sin. 2018, 5, 445–456. [Google Scholar] [CrossRef]
- Choi, D.J.; Han, J.H.; Park, S.U.; Hong, S.K. Comparative Study of CNN and RNN for Motor fault Diagnosis Using Deep Learning. In Proceedings of the 2020 IEEE 7th International Conference on Industrial Engineering and Applications (ICIEA), Bangkok, Thailand, 16–18 April 2020. [Google Scholar]
- Zhou, J.; Tian, S.; Yang, C.; Ren, X. Test Generation Algorithm for Fault Detection of Analog Circuits Based on Extreme Learning Machine. Comput. Intell. Neurosci. 2014, 2014, 55. [Google Scholar] [CrossRef]
- Zhao, X.; Jia, M.; Liu, Z. Semisupervised graph convolution deep belief network for fault diagnosis of electormechanical system with limited labeled data. IEEE Trans. Ind. Inform. 2020, 17, 5450–5460. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Chen, Y.B. Extreme learning machine based transfer learning for aero engine fault diagnosis. Aerosp. Sci. Technol. 2022, 121, 107311. [Google Scholar] [CrossRef]
- Yang, B.; Xu, S.; Lei, Y.; Lee, C.G.; Stewart, E.; Roberts, C. Multisource transfer learning network to complement knowledge for intelligent diagnosis of machines with unseen faults. Mech. Syst. Signal Process. 2022, 162, 108095. [Google Scholar] [CrossRef]
- Li, X.; Wang, N.; Lyu, Y.; Duan, Y.; Zhao, J. Data-Driven Fault Early Warning Model of Automobile Engines Based on Soft Classification. Electronics 2023, 12, 511. [Google Scholar] [CrossRef]
- Zheng, Z.; Yuan, H.; Yang, H.; Yang, Q. Actuator fault diagnosis based fuzzy multiple model structure for moving systems. In Proceedings of the International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; p. 5274734. [Google Scholar]
- Lyu, N.; Yu, X.Y.; Wu, J.F. A fault diagnosis model through G-K fuzzy clustering. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics, Hague, The Netherlands, 10–13 October 2004; pp. 5114–5118. [Google Scholar]
- Huang, J.J.; Li, S.Y. A GA-based approach to rough data model. In Proceedings of the 5th World Congress on Intelligent Control and Automation (WCICA’2004), Hangzhou, China, 15–19 June 2004; pp. 1880–1884. [Google Scholar]
- Palade, V.; Patton, R.J.; Uppal, F.J.; Quevedo, J.; Daley, S. Fault Diagnosis of an industrial gas turbine using neurofuzzy methods. In Proceedings of the 15th IFAC World Congress, Barcelona, Spain, 21–26 July 2002; pp. 2477–2482. [Google Scholar]
- Mohammadi Moghadam, H.; Foroozan, H.; Gheisarnejad, M.; Khooban, M.H. A survey on new trends of digital twin technology for power systems. J. Intell. Fuzzy Syst. Appl. Eng. Technol. 2021, 2, 41. [Google Scholar] [CrossRef]
- Shafto, M.; Conroy, M.; Doyle, R.; Glaessgen, E.; Kemp, C.; LeMoigne, J.; Wang, L. Modeling, simulation, information technology & processing roadmap. Natl. Aeronaut. Space Adm. 2012, 32, 1–38. [Google Scholar]
- Tao, F.; Zhang, M.; Liu, Y.; Nee, A.Y. Digital twin driven prognostics and health management for complex equipment. Cirp Ann. 2018, 67, 169–172. [Google Scholar] [CrossRef]
- Wu, H.; Yang, F.; Wang, B.; Wu, H.; Wang, Z.; Jiang, L.; Huang, W.; Wang, G.; Le, C. Study of Digital Twin Based Launch Vehicle Structural Design Manufacture and Validation Technology. Astronaut. Syst. Eng. Technol. 2021, 5, 7–13. [Google Scholar]
- Zhang, S.; Yue, M.Y. A Rocket Health Management System for Vehicle Testing and launching Base on Digital Twin. Comput. Meas. Control 2021, 29, 8–14. [Google Scholar]
- Tao, F.; Liu, W.; Liu, J.; Liu, X.; Liu, Q.; Qu, T.; Hu, T.; Zhang, Z.; Xiang, F.; Xu, W.; et al. Digital twin and its Potential Application Exploration. Comput. Integr. Manuf. Syst. 2018, 24, 1–18. [Google Scholar]
- Lindh, T.; Ahola, J.; Spatenka, P.; Rautiainen, A.L. Automatic bearing fault classification combining statistical classification and fuzzy logic. In Proceedings of the 4th Nordic Workshop in Power & Industrial Electronics, Trondheim, Norway, 14–16 June 2004. [Google Scholar]
- Marinai, L.; Singh, R.; Curnock, B.; Probert, D. Detection and Prediction of the Performance Deterioration of a Turbofan Engine. Proc. Int. Gas Turbine Congr. 2023, 12, 2–7. [Google Scholar]
- Dworakowski, Z. Comparison of Novelty Detection Methods for Detection of Various Rotary Machinery Faults. Sensors 2021, 21, 3536. [Google Scholar]
- Brotherton, T.; Jahns, G.; Jacobs, J.; Wroblewski, D. Prognosis of faults in gas turbine engines. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 25 March 2000. [Google Scholar]
- Nikolaev, S.; Belov, S.; Greenkina, T.; Uglov, T.; Leshchev, V. The Methodology of Hybrid Modelling for Gas Turbine Subsystems Prescriptive Analytics. Cyber-Phys. Syst. Digit. Technol. Appl. 2021, 350, 39–51. [Google Scholar]
- Fsthun, O.S. Integrated Vehicle Health Management for Aerospace Platforms. IEEE Instrum. Meas. Mag. 2002, 5, 21–24. [Google Scholar] [CrossRef]
- Kumar, A.; Chinnam, R.B.; Tseng, F. An HMM and Polynomial Regression Based Approach for Remaining Useful Life and Health State Estimation of Cutting Tools. Comput. Ind. Eng. 2018, 128, 1008–1014. [Google Scholar] [CrossRef]
- Xiong, R.; Li, L.L.; Tian, J.P. Towards a smarter battery management system: A critical review on battery state of health monitoring methods. J. Power Sources 2018, 405, 18–25. [Google Scholar] [CrossRef]
- Tang, X.; Xu, A.; Niu, S. KKCV-GA-Based Method for Optimal Analog Test Point Selection. IEEE Trans. Instrum. Meas. 2017, 66, 24–32. [Google Scholar] [CrossRef]
- Song, P.; He, Y.Z. Test point selection based on binary grey wolf optimization algorithm for analog circuit. In Proceedings of the IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference, Chongqing China, 12–14 October 2018; pp. 2253–2256. [Google Scholar]
- Hou, W.; Zhang, Z. A method of test points optimization selection based on improved bacterial foraging algorithm. In Proceedings of the Prognostics and System Health Management Conference, Chengdu, China, 19–21 October 2016; pp. 1–5. [Google Scholar]
- Ma, Q.F.; He, Y.Z.; Zhou, F.Q. Multi-objective fruit fly optimization algorithm for test point selection. In Proceedings of the IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference, Xi’an, China, 3–5 October 2016; pp. 272–276. [Google Scholar]
- Li, W.; Peng, M.J.; Wang, Q.Z. Comparison of Different Fault Detection Statistics Detectability in PCA. In Proceedings of the 2nd International Conference on Computer Application and System Modeling, Taiyuan, China, 27–29 July 2012; pp. 462–465. [Google Scholar]
- Olson, C.C.; Judd, K.P.; Nichols, J.M. Manifold learning techniques for unsupervised anomaly detection. Expert Syst. Appl. 2018, 91, 374–385. [Google Scholar] [CrossRef]
- Liu, Y.N.; Feng, X.Q.; Zhou, Z.G. Multimodal video classification with stacked contractive autoencoders. Signal Process. 2016, 120, 761–766. [Google Scholar] [CrossRef]
- Liao, L.; Wang, H.; Lee, J. Bearing Health Assessment and Fault Diagnosis Using the Methods of Self-Organizing Map. In Proceedings of the 61st Meeting of the Society for Machinery Failure Prevention Technology, University of Cincinnati; 2007. Available online: https://www.researchgate.net/publication/236893076_Bearing_Health_Assessment_and_Fault_Diagnosis_Using_the_Method_of_Self-Organizing_Map (accessed on 28 March 2023).
- Lee, J.; Wu, F.; Zhao, W.; Ghaffari, M.; Liao, L.; Siegel, D. Prognostics and health management design for rotary machinery systems—Reviews, methodology and applications. Mech. Syst. Signal Process. 2014, 42, 314–334. [Google Scholar] [CrossRef]
- Yang, F.; Habibullah, M.S.; Zhang, T.; Xu, Z.; Lim, P.; Nadarajan, S. Health Index-based Prognostics for Remaining Useful Life Predictions in Electrical Machines. IEEE Trans. Ind. Electron. 2016, 63, 2633–2644. [Google Scholar] [CrossRef]
- Vahidi, B.; Zeinoddini, M.H. Health Index Calculation for Power Transformers using Technical and Economical parameters. IET Sci. Meas. Technol. 2016, 10, 823–830. [Google Scholar]
- Vasan, A.S.S.; Long, B.; Pecht, M. Diagnostics and Prognostics Method for Analog Electronic Circuits. IEEE Trans. Ind. Electron. 2013, 11, 5277–5291. [Google Scholar] [CrossRef]
- Liu, K.B.; Gebraeel, N.Z.; Shi, J.J. A Data-Level Fusion Model for Developing Composite Health Indices for Degradation Modeling and Prognostic Analysis. IEEE Trans. Autom. Sci. Eng. 2013, 10, 652–664. [Google Scholar] [CrossRef]
- Zhou, L.; Wang, H.W.; Xu, S.S. Aero-engine gas path system health assessment based on depth digital twin. Eng. Fail. Anal. 2022, 142, 106790. [Google Scholar] [CrossRef]
- Vasan, A.S.S.S.; Pecht, M.; Long, B. Health assessment of electronic systems. In Proceedings of the International Conference on Quality, Reliability, Risk, Maintenance, and Safety Engineering, Chengdu, China, 15–18 July 2013; pp. 1689–1694. [Google Scholar]
- Khoddam, M.; Sadeh, J.; Pourmohamadiyan, P. Performance Evaluation of Circuit Breaker Electrical Contact Based on Dynamic Resistance Signature and Using Health Index. IEEE Trans. Compon. Packag. Manuf. Technol. 2016, 6, 1505–1512. [Google Scholar] [CrossRef]
- Tamilselvan, P.; Wang, P. Failure diagnosis using deep belief learning based health state classification. Reliab. Eng. Syst. Saf. 2013, 115, 124–135. [Google Scholar] [CrossRef]
- Lu, C.; Wang, Z.Y.; Zhou, B. Intelligent fault diagnosis of rolling bearing using hierarchical convolutional network based health state classification. Adv. Eng. Inform. 2017, 32, 139–151. [Google Scholar] [CrossRef]
- Siegel, D.; Al-Atat, H.; Shauche, V.; Liao, L.; Snyder, J.; Lee, J. Novel method for rolling element bearing health assessment-A tachometer-less synchronously averaged envelope feature extraction technique. Mech. Syst. Signal Process. 2012, 29, 362–376. [Google Scholar] [CrossRef]
- Ma, J.; Lu, C.; Zhang, W.; Tang, Y. Health assessment and fault diagnosis for centrifugal pumps using Softmax regression. J. Vibroeng. 2014, 16, 1464–1474. [Google Scholar]
- Lv, Z.; Wang, J.; Zhang, G.; Huang, J. Prognostics health management of condition-based maintenance for aircraft engine systems. In Proceedings of the 2015 IEEE Conference on Prognostics and Health Management (PHM), Beijing, China, 21–23 October 2015. [Google Scholar]
- Dunsdon, J.; Harrington, M. The Application of Open System Architecture for Condition Based Maintenance to Complete IVHM. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008. [Google Scholar]
- Line, J.K.; Clements, N.S. A systematic approach for developing prognostic algorithms on large complex systems. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2005. [Google Scholar]
- Yu, T. Health management application in space TT&C ground system. Telecommun. Eng. 2021, 61, 30–35. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Failure Mode | Possible Causes | Possible Effects |
|---|---|---|---|
| Heat Exchanger (HEX) | Coil fracture/leakage | ① Coil weld or parent material fracture due to fatigue, ② loss of channel/bracket supports, ③ damage due to impact from fragmented liner, turning vanes, or channels, ④ tube wall wear at support points, ⑤ tube damage during HPOTP removal and installation, and ⑥ coil collapse. | Mixing of GOX with fuel-rich hot gas stream could result in ignition, detonation, and burning. Burning would result in coil, HGM liner or HPOTP turbine, or main injector burn-through causing loss of engine. Fuel-rich hot gas could enter the downstream side of the coil and combine with oxygen from the bypass system, causing a fire in the discharge line that supplies the POGO accumulator and the vehicle oxygen pressurization system. |
| High Pressure Fuel Turbopump (HPFTP) | Structural Failure of Turbine Blades | ① Rotor blade cracks, ② loss of blade dampers, ③ excessive tip rubbing, ④ tip seal failure, ⑤ housing pilot lip failure, ⑥ housing retaining lug failure, ⑦ nozzle failure, ⑧ impact from macroscopic contaminant, ⑨ disk fir-tree yielding or fracture, and ⑩ excessive rubbing of platform seals. | Multiple blade failures resulting in immediate loss of turbine power and rotor imbalance. Rotor imbalance results in excessive vibration which would cause more rubbing and additional component failures. Extensive turbine damage could result from impact and overtemperature. Possible burst of pump inlet due to pressure surge. Possible HPFTP seizure could result in LOX-rich shutdown with subsequent main injector or fuel preburner injector post damage/erosion. |
| Loss of support or position control. | ① Bearing failure (ball/cage failure, loss of coolant corrosion, contamination, race, failures, ② fracture/distortion of bearing carrier or excessive loss of bolt preload, ③ excessive loss of bearing retaining nut preload, ④ excessive clearance at pump interstage seals, ⑤failure or excessive wear of bearing preload spring, ⑥ pump slinger pin failure, and ⑦ stud failure or loss of preload. | Reduced speed, flow and pump output pressure, and increased vibration levels. Possible turbine blade failure or disintegration of rotating assembly. | |
| High Pressure Oxidizer Turbopump. (HPOTP) | Turbine Blade structural failure. | ① Blade cracks, ② rotor blade tip rubbing, ③ honeycomb retainer failure, ④ impact, ⑤ inadequate cooling flow, ⑥ loss of damper function, ⑦ operation to resonance, ⑧ fir-tree yielding and fracture, and ⑨ nozzle failure. | Loss of turbine blades, leading to multiple blade failure and rotor unbalance, with subsequent rubbing and ultimate rotating assembly disintegration. |
| Loss of Axial Balancing Force | ① Damage to balance piston orifices from contamination, and ② loss of bolt preload causing rubbing in the balance piston region. | Excessive shaft axial displacement resulting in internal rubbing of rotating components. Disintegration of rotating parts will occur at high speeds. | |
| Failure to Transient Torque | ① Failure of shaft or impeller splines, ② curvic coupling failure, ③ loss of turbine tie-bolt preload, ④ loss of preburner tie-bolt preload, ⑤ main impeller retainer nut/lock failure, ⑥ turbine disc failure, and ⑦ shaft failure. | Turbine unload and overspeed with probable blade failure and/or disk burst, rubbing, and rotor unbalance. Turbine burst may cause shrapnel damage to other parts of the engine, resulting in ultimate rotating assembly disintegration, fire, or explosion. | |
| Low Pressure Fuel Turbopump (LPFTP) | Fuel leakage fast liftoff seal. | ① Contamination, ② damaged scaling surfaces on liftoff seal or shaft, ③ binding within liftoff seal, ④ leakage past static seal at liftoff seal to manifold interface, and ⑤ damage due to failure to liftoff. | Fuel flow into the turbine and through the MCC and nozzle with the possible result of open-air fire/detonation. |
| Low Pressure Oxidizer Turbopump | Loss of Support and Position Control | ① High rotor axial thrust loads; ② pump/turbine end bearing failure due to wear, spalling, pitting, cage wear/failure, corrosion, loss of coolant or contamination. ③ Loss of support bolt preload; ④ loss of pump/turbine end bearing inner and outer race retaining nut preload due to nut failure, lock failure, or vibration. ⑤ turbine end bearing preload spring wear/failure; ⑥ excessive fretting at bearing journals; and ⑦ excessive rotor radial loads. | Potential contact between rotor and stationary components due to excessive rotor movement; rubbing in oxygen environment can cause LPOTP fire or explosion. |
| Nozzle Assembly | External Rupture | ① Structural failure of the steer horn, feedlines, mixer, diffuser, forward and aft manifold, and ② tube failure and jacket fatigue. | Overpressurization due to leakage external to the nozzle and into the aft compartment. Fragmentation may cause damage to adjacent engines. Sudden loss of fuel causes LOX-rich operation. |
| Fuel Valve | Internal Leakage | ① Damage/failure of seal, ball, or bellows, and ② contamination. | ① Fire due to leakage, and ② open-air detonation and overpressure condition. |
| Fuel Preburner | Non-uniformity of Fuel Flow in the Injector Element. | ① Contamination in the fuel annulus, and ② slippage of LOX post support pins. | Local high mixtures and recirculation of gases around the elements’ periphery due to non-uniformity which, in turn, cause local erosion of the injection element tip, the injector faceplate, the combustion zone liner or injector baffle. Erosion through the liner may result in burn-through of the structural wall. |
| Chamber Coolant Valve Actuator | Sequence Valve Leaks Passing Early Control Pressurant Downstream | Damaged sequence valve and valve seals. | The control pressurant closes the purge sequence PAV early with the result of terminating preburner shutdown purges, HPOTP intermediate seal purge, and pogo shutdown charge. Loss of pogo shutdown charge during MECO, at zero 6 condition and minimum NPSP, will result in cavitation/overspeed of HPOTP and/or LPOTP. |
| POGO | Low-FRE | High-FRE | Fluctuation | Shock | Noise | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Batch | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 1 | 2 | 3 | 1 | 2 | 1 | 2 |
| RMSE | 0.002 | 0.003 | 12.061 | 0.005 | 0.0827 | 0.007 | 0.125 | 0.593 | 3.362 | 2.669 | 1.722 | 514.729 | 5.730 | 18.948 | 6.347 |
| Evaluation Index | Q1 | Q3 | IQR | Upper Whisker | Lower Whisker |
|---|---|---|---|---|---|
| POGO | 0.00033 | 0.00192 | 0.00159 | 0.004311 | −0.002059 |
| 0.00043 | 0.00197 | 0.00155 | 0.004293 | −0.001894 | |
| 7.23250 | 20.64000 | 13.40750 | 40.75125 | −12.878750 | |
| Low-FRE | 0.34259 | 0.51403 | 0.24975 | 0.888657 | −0.032034 |
| 0.03875 | 0.08733 | 0.04858 | 0.160188 | −0.034113 | |
| 0.01493 | 0.03593 | 0.02100 | 0.06743 | −0.016573 | |
| High-FRE | 0.19508 | 1.46291 | 1.26783 | 3.364663 | −1.706674 |
| 0.41815 | 1.09954 | 0.68138 | 2.121609 | −0.603918 | |
| Fluctuation | 0.89775 | 3.10775 | 2.21000 | 6.42275 | −2.417250 |
| 0.32800 | 0.83250 | 0.50450 | 1.58925 | −0.428750 | |
| 1.65750 | 5.71250 | 4.05500 | 11.795 | −4.425000 | |
| Shock | 1458.52925 | 2113.22075 | 654.69150 | 3095.258 | 476.492000 |
| 2.08061 | 12.68086 | 10.60025 | 28.58124 | −13.819764 | |
| Noise | 103.58910 | 119.63305 | 16.04395 | 143.699 | 79.523175 |
| 120.62943 | 126.47000 | 5.84058 | 135.2309 | 111.868563 |
| Evaluation Index | Batch | Excellent | Good | Normal | Bad | Deterioration |
|---|---|---|---|---|---|---|
| POGO | 1 | 0.937 | 0.012 | 0.003 | 0.013 | 0.035 |
| 2 | 0.849 | 0.05 | 0.038 | 0.028 | 0.035 | |
| 3 | 0.972 | 0.013 | 0.015 | 0.000 | 0.000 | |
| Low-FRE | 1 | 1.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| 2 | 0.975 | 0.003 | 0.003 | 0.006 | 0.013 | |
| 3 | 1.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| High-FRE | 1 | 1.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| 2 | 0.936 | 0.028 | 0.019 | 0.013 | 0.004 | |
| Fluctuation | 1 | 0.965 | 0.003 | 0.013 | 0.013 | 0.006 |
| 2 | 0.934 | 0.009 | 0.009 | 0.006 | 0.042 | |
| 3 | 0.991 | 0.003 | 0.006 | 0.000 | 0.000 | |
| Shock | 1 | 0.000 | 0.000 | 0.000 | 0.464 | 0.536 |
| 2 | 0.95 | 0.05 | 0.000 | 0.000 | 0.000 | |
| Noise | 1 | 1.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| 2 | 0.982 | 0.018 | 0.000 | 0.000 | 0.000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, R.; Yang, J.; Huang, L.; Liu, Z.; Zhou, X.; Zhou, Z. Review of Launch Vehicle Engine PHM Technology and Analysis Methods Research. Aerospace 2023, 10, 517. https://doi.org/10.3390/aerospace10060517
Lin R, Yang J, Huang L, Liu Z, Zhou X, Zhou Z. Review of Launch Vehicle Engine PHM Technology and Analysis Methods Research. Aerospace. 2023; 10(6):517. https://doi.org/10.3390/aerospace10060517
Chicago/Turabian StyleLin, Ruliang, Jialin Yang, Lijing Huang, Zhiwen Liu, Xuehua Zhou, and Zhiguo Zhou. 2023. "Review of Launch Vehicle Engine PHM Technology and Analysis Methods Research" Aerospace 10, no. 6: 517. https://doi.org/10.3390/aerospace10060517
APA StyleLin, R., Yang, J., Huang, L., Liu, Z., Zhou, X., & Zhou, Z. (2023). Review of Launch Vehicle Engine PHM Technology and Analysis Methods Research. Aerospace, 10(6), 517. https://doi.org/10.3390/aerospace10060517