
Electric Sail Mission Expeditor, ESME: Software Architecture and Initial ESTCube Lunar Cubesat E-Sail Experiment Design

 , ,
, ,  ,
,  , , , , , , ,
, , , , , , ,  add
Show full author list
add
Show full author list
Abstract
:1. Introduction
1.1. E-Sail Fundamentals
1.2. E-Sail Modelling and Mission Analysis Tools
1.3. E-Sail In-Orbit Demonstration Missions
1.4. Paper Structure
2. E-Sail Development Methods
2.1. E-Sail Modelling Methods
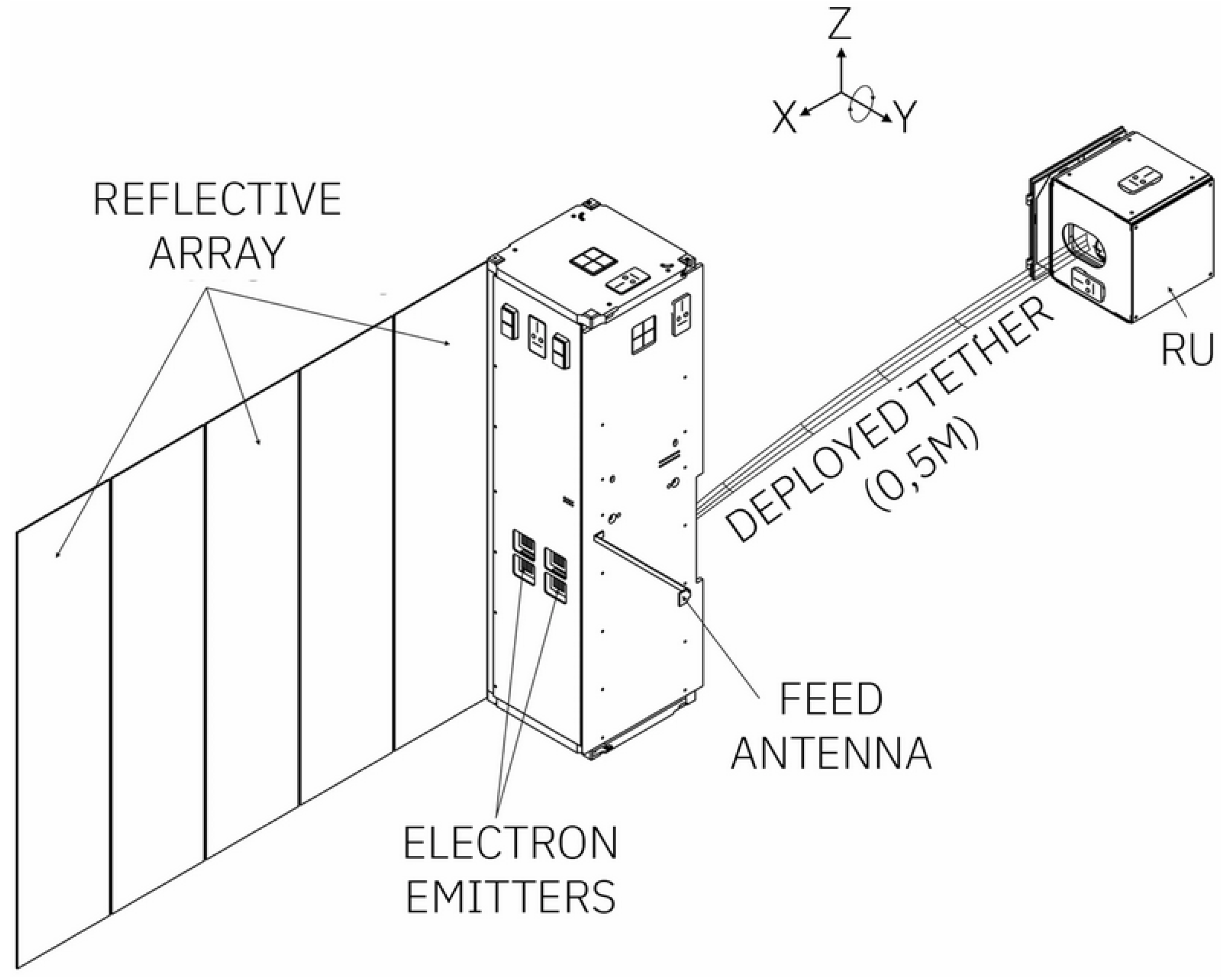
2.2. E-Sail Hardware Components
2.3. E-Sail Deployment and Operations
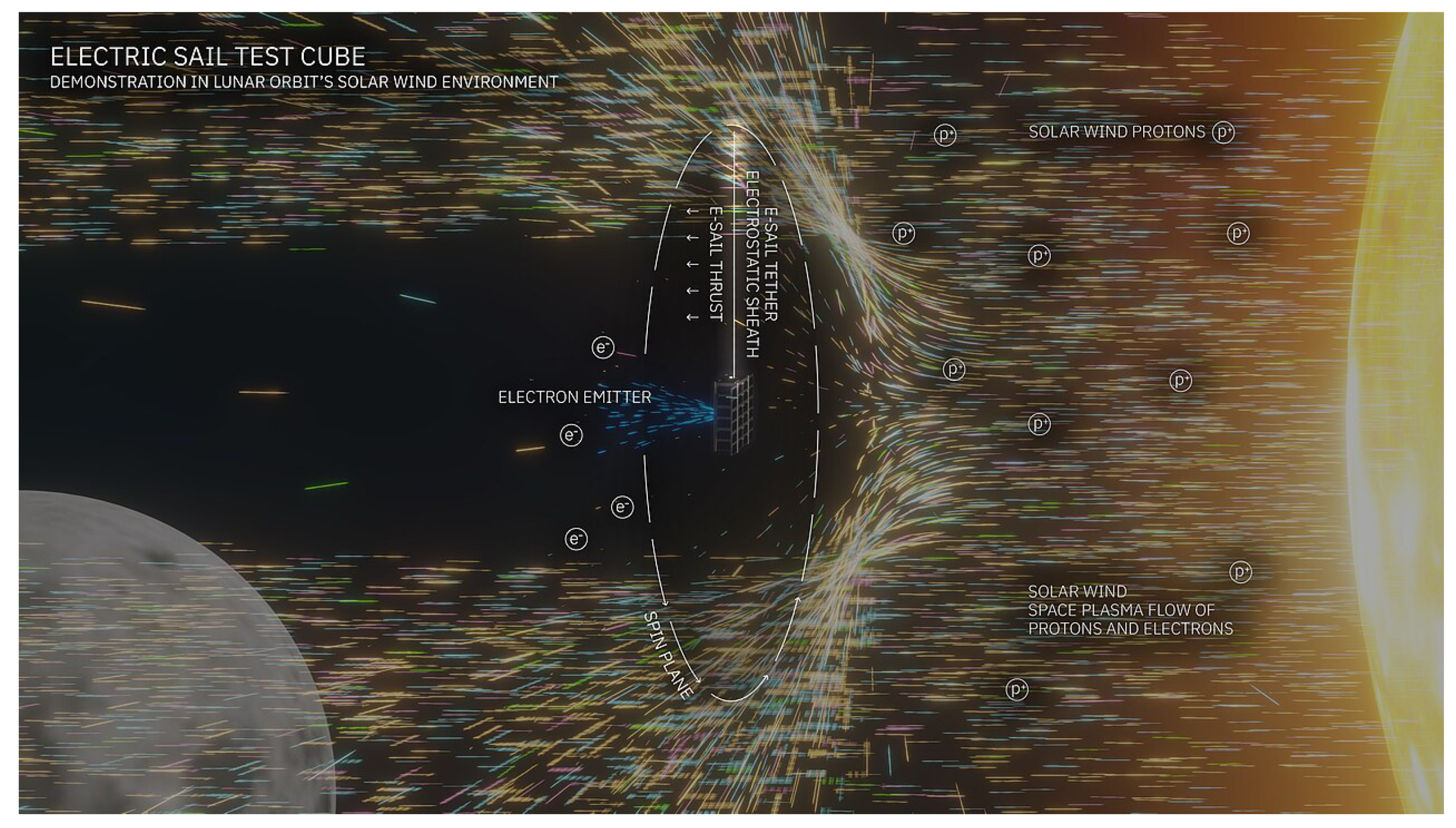
2.4. E-Sail Surrounding Space Plasma Environment
3. ESME: Electric Sail Mission Expeditor
3.1. Software Requirements
- Simulate a space plasma flow on multiple scenarios:
- (a)
- on multiple solar wind regimes:
- solar wind moving relative to the spacecraft (implemented in this paper);
- satellite moving with respect to nearly stationary plasma in the ionosphere.
- (b)
- taking into account eclipses, magnetospheres, and solar activity;
- (c)
- with different precision levels:
- average values for solar wind density and velocity;
- simulated time-varying data for density and velocity;
- user-provided datasets.
- Simulate physical–mechanical and control models of the E-sail in multiple regimes:
- (a)
- varying levels of detail in the tether structure:
- (b)
- different number of tethers per spacecraft:
- single-tether system (implemented in this paper);
- four-tether system;
- generalised multi-tether system.
- (c)
- different tether deployment and E-sail control methods, accounting for changes in the moment of inertia and the centre of mass as well as propulsion required for tether deployment and navigation required for operations:
- idealistic centrifugal tether deployment (implemented in this paper);
- idealistic gravity gradient tether deployment;
- realistic closed-loop electric sail deployment scheme between spin thrusters or actuators, attitude control algorithms and the tether deployment system;
- realistic closed-loop electric sail operations and control scheme between on-board sensors, cameras, navigation and control algorithms.
- Simulate the charging of tether, creating an electrostatic sheath that forms a virtual electric sail in negative and positive modes:
- (a)
- positive polarity for the solar wind environment which requires an electron emitter (implemented in this paper);
- (b)
- electron beam with specified current/voltage and beam divergence;
- (c)
- negative polarity for the ionospheric environment.
- Simulate the Coulomb drag interaction between the tether and the space plasma flow—the particles are deflected creating the propulsive Coulomb drag thrust effect (implemented in this paper: one of the main E-sail experiment results presented below).
- Calculate the E-sail trajectory by integrating classical Keplerian orbits with the Coulomb drag thrust.
- Implement multiple orbital fidelity regimes of the E-sail:
- (a)
- Coulomb drag trajectory: represents the physical phenomena but is extremely computationally expensive; therefore, it cannot be used for full E-sail mission design (implemented in this paper);
- (b)
- Thrust per unit of tether length trajectory: physically accurate approximation which can be used to model the operations of a practical E-sail and to design high-fidelity missions;
- (c)
- Thrust vector trajectory: orbital accurate approximation which can be used to design high-fidelity orbits but does not account for the E-sail’s operational specifics;
- (d)
- Precalculated trajectory: a browser of realistic E-sail trajectories which can be used for rough-and-ready mission sketches without propagating orbits.
- Implement an E-sail control abstraction and Application Programming Interface (API) module which would simplify the mission design process for non-experts and allow them to connect with mission and spacecraft design software that cannot model the E-sail natively:
- (a)
- Attitude and spin plane control abstraction;
- (b)
- Tether charge abstraction;
- (c)
- Trajectory output for default or user-defined abstraction parameters (i.e., how the E-sail control and charging yields the trajectory);
- (d)
- Abstraction of other control methods necessary for E-sail operations (see the proposed closed-loop control schemes above). With a future sensor implementation, the user would have an option to specify sensors and their performance or consider the E-sail as a black box that “just works” using default simplified algorithms and sensors (equivalent of the Hohmann transfer in chemical propulsion);
- (e)
- Interface with other spacecraft subsystems (could be emulated by other software or hardware tools), such as electrical power, navigation and attitude determination [33].
- Provide the following outputs:
- (a)
- Raw data of the simulations over time where available:
- Solar wind simulations;
- Magnitude and direction of the generated thrust;
- Corresponding changes in orbital parameters;
- Changes in spacecraft attitude.
- (b)
- Graphs and plots of the results;
- (c)
- 2D/3D representation of the spacecraft state, solar wind, and thrust;
- (d)
- Graphical representation of the orbital trajectory.
3.2. Initial Architecture
3.3. Current State of Development
4. ESME Development Toolkit
4.1. The Rust Programming Language
4.2. Strategic Use of a Game Engine
- User interface (Text boxes, Sliders, Camera control with mouse).
- Graphical output (3D graphics, Camera, Illumination).
- Entity–Component–System architecture, detailed below.
4.3. Entity–Component–System
- Entities: An Entity can be created for every distinct element that is present in the simulation. Internally, an Entity is nothing more than an ID number that uniquely identifies it among all other entities in existence.
- Components: Components are reusable pieces of code that model specific behaviours for the Entities. Ideally, they only contain data, plus methods for modifying said data.
- Systems: Systems are functions that operate at run time, gathering the Entities that have specific sets of Components, and act on them.
4.4. UOM (Units of Measurement) Package
5. E-Sail Experiment Design for Lunar Orbit
5.1. Highly Elliptical Orbit
5.2. Lunar Orbit
6. ESTCube Lunar Nanospacecraft E-Sail Experiment Simulation
7. ESTCube Lunar CubeSat Orbit Escape Control Law and Trajectory Design
7.1. E-Sail Orbital Dynamics
7.2. Orbit Escape Control Law and Trajectory Design
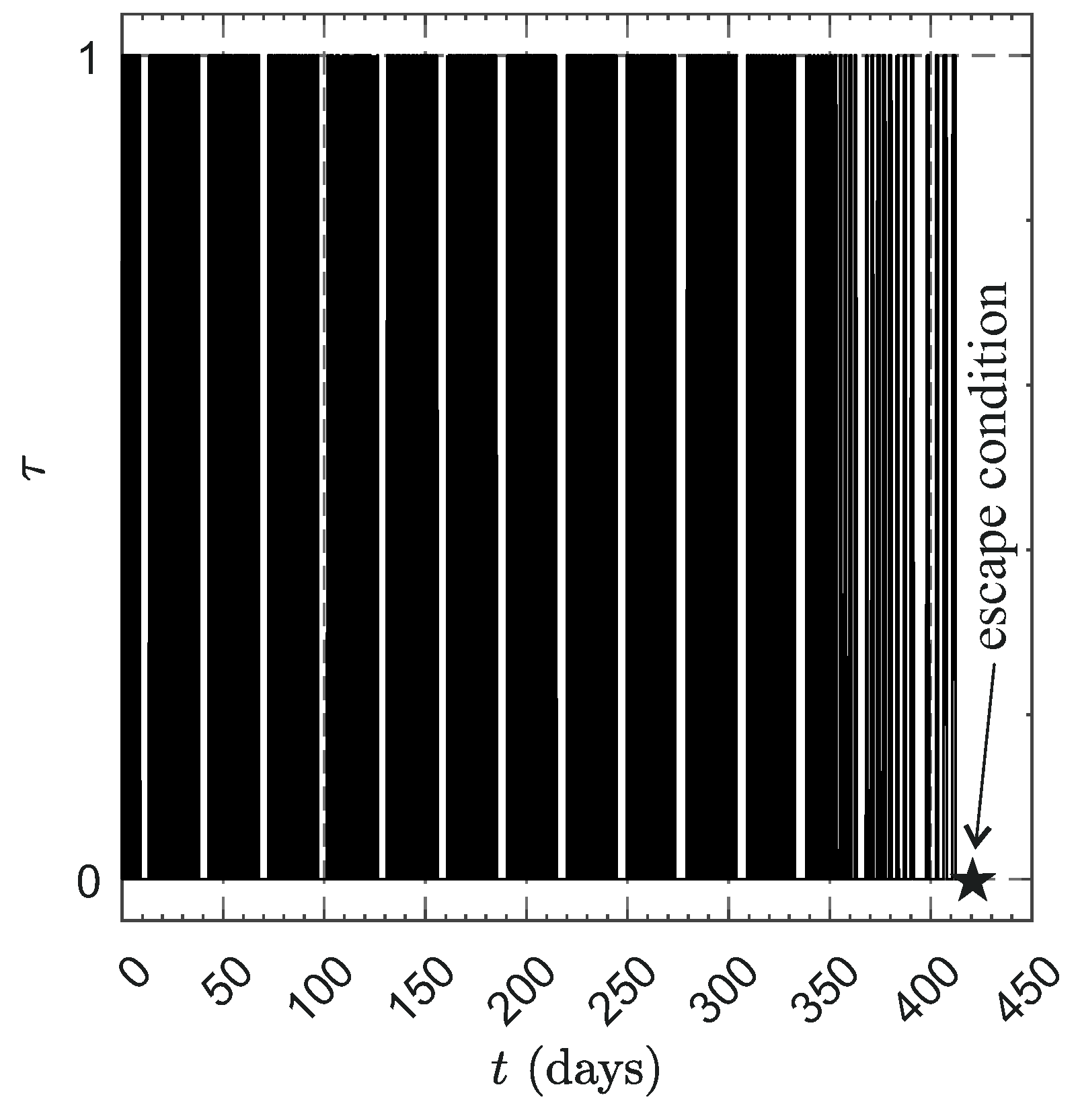
7.3. Numerical Results
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AU | Astronomical Unit |
| ECS | Entity–Component–System |
| ESTCube | Electric Solar Sail Test Cube |
| ESME | Electric Sail Mission Expeditor |
| GTO | Geostationary Transfer Orbit |
| GUI | Graphical User Interface |
| HEO | Highly Elliptical Orbit |
| LEO | Low Earth Orbit |
| OOP | Object-oriented Programming |
| PIC | Particle-in-cell |
| SISPO | Space Imaging Simulator for Proximity Operations |
References
- Electric Sailing. Papers, Press Releases and Workshop Material. Available online: https://www.electric-sailing.fi/publications.html (accessed on 11 June 2023).
- Hoyt, R.P.; Forward, R.L. Alternate Interconnection Hoytether Failure Resistant Multiline Tether. U.S. Patent No. 6,286,788, 11 September 2001. [Google Scholar]
- Electric Solar Wind Sail. Available online: https://space-travel.blog/esail542-4028fa60700e (accessed on 11 June 2023).
- Bassetto, M.; Niccolai, L.; Quarta, A.; Mengali, G. A comprehensive review of Electric Solar Wind Sail concept and its applications. Prog. Aerosp. Sci. 2022, 128, 100768. [Google Scholar] [CrossRef]
- Janhunen, P.; Sandroos, A. Simulation study of solar wind push on a charged wire: Basis of solar wind electric sail propulsion. Ann. Geophys. 2007, 25, 755–767. [Google Scholar] [CrossRef] [Green Version]
- Janhunen, P. Electric Sail for Spacecraft Propulsion. AIAA J. Propuls. Power 2004, 20, 763–764. [Google Scholar] [CrossRef]
- Janhunen, P. On the feasibility of a negative polarity electric sail. Ann. Geophys. 2009, 27, 1439–1447. [Google Scholar] [CrossRef] [Green Version]
- Janhunen, P.; Toivanen, P.K.; Polkko, J.; Merikallio, S.; Salminen, P.; Haeggström, E.; Seppänen, H.; Kurppa, R.; Ukkonen, J.; Kiprich, S.; et al. Invited Article: Electric solar wind sail: Toward test missions. Rev. Sci. Instrum. 2010, 81, 111301. [Google Scholar] [CrossRef]
- Janhunen, P. Simulation study of the plasma-brake effect. Ann. Geophys. 2014, 32, 1207–1216. [Google Scholar] [CrossRef] [Green Version]
- Toivanen, P.; Janhunen, P.; Envall, J. Electric sail control mode for amplified transverse thrust. Acta Astronaut. 2015, 106, 111–119. [Google Scholar] [CrossRef] [Green Version]
- Toivanen, P.; Janhunen, P. Thrust vectoring of an electric solar wind sail with a realistic sail shape. Acta Astronaut. 2017, 131, 145–151. [Google Scholar] [CrossRef] [Green Version]
- Envall, J.; Janhunen, P.; Toivanen, P.; Pajusalu, M.; Ilbis, E.; Kalde, J.; Averin, M.; Kuuste, H.; Laizans, K.; Allik, V.; et al. E-sail test payload of ESTCube-1 nanosatellite. arXiv 2014, arXiv:1404.6961. [Google Scholar] [CrossRef]
- Praks, J.; Mughal, M.R.; Vainio, R.; Janhunen, P.; Envall, J.; Oleynik, P.; Näsilä, A.; Leppinen, H.; Niemelä, P.; Slavinskis, A.; et al. Aalto-1, multi-payload CubeSat: Design, integration and launch. Acta Astronaut. 2021, 187, 370–383. [Google Scholar] [CrossRef]
- Seppänen, H.; Rauhala, T.; Kiprich, S.; Ukkonen, J.; Simonsson, M.; Kurppa, R.; Janhunen, P.; Hæggström, E. One kilometer (1 km) electric solar wind sail tether produced automatically. Rev. Sci. Instrum. 2013, 84, 095102. [Google Scholar] [CrossRef] [PubMed]
- Slavinskis, A.; Pajusalu, M.; Kuuste, H.; Ilbis, E.; Eenmäe, T.; Sünter, I.; Laizans, K.; Ehrpais, H.; Liias, P.; Kulu, E.; et al. ESTCube-1 In-Orbit Experience and Lessons Learned. IEEE Aerosp. Electron. Syst. Mag. 2015, 30, 12–22. [Google Scholar] [CrossRef]
- Mughal, M.R.; Praks, J.; Vainio, R.; Janhunen, P.; Envall, J.; Näsilä, A.; Oleynik, P.; Niemelä, P.; Nyman, S.; Slavinskis, A.; et al. Aalto-1, multi-payload CubeSat: In-orbit results and lessons learned. Acta Astronaut. 2021, 187, 557–568. [Google Scholar] [CrossRef]
- Dalbins, J.; Allaje, K.; Iakubivskyi, I.; Kivastik, J.; Komarovskis, R.O.; Plans, M.; Sünter, I.; Teras, H.; Ehrpais, H.; Ilbis, E.; et al. ESTCube-2: The Experience of Developing a Highly Integrated CubeSat Platform. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–16. [Google Scholar] [CrossRef]
- Sakamoto, H.; Mughal, M.R.; Slavinskis, A.; Praks, J.; Toivanen, P.; Janhunen, P.; Palmroth, M.; Kilpua, E.; Vainio, R. Verification of Tether Deployment System aboard CubeSat through Dynamics Simulations and Tests. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Big Sky, MT, USA, 6–13 March 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Ofodile, I.; Ofodile-Keku, N.; Jemitola, P.; Anbarjafari, G.; Slavinskis, A. Integrated Anti-Windup Fault-Tolerant Control Architecture for Optimized Satellite Attitude Stabilization. IEEE J. Miniat. Air Space Syst. 2021, 2, 189–198. [Google Scholar] [CrossRef]
- Kalnina, K.; Bussov, K.; Ehrpais, H.; Teppo, T.; Kask, S.K.; Jauk, M.; Slavinskis, A.; Envall, J.; Ehrpais, H.; Slavinskis, A. Crowdfunding for satellite development: ESTCube-2 case. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–14. [Google Scholar] [CrossRef]
- Iakubivskyi, I.; Janhunen, P.; Praks, J.; Allik, V.; Bussov, K.; Clayhills, B.; Dalbins, J.; Eenmäe, T.; Ehrpais, H.; Envall, J.; et al. Coulomb drag propulsion experiments of ESTCube-2 and FORESAIL-1. Acta Astronaut. 2020, 177, 771–783. [Google Scholar] [CrossRef]
- Dalbins, J.; Allaje, K.; Ehrpais, H.; Iakubivskyi, I.; Ilbis, E.; Janhunen, P.; Kivastik, J.; Merisalu, M.; Noorma, M.; Pajusalu, M.; et al. Interplanetary Student Nanospacecraft: Development of the LEO Demonstrator ESTCube-2. Aerospace 2023, 10, 503. [Google Scholar] [CrossRef]
- Pajusalu, M.; Slavinskis, A. Characterization of Asteroids Using Nanospacecraft Flybys and Simultaneous Localization and Mapping. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–9. [Google Scholar] [CrossRef]
- Pajusalu, M.; Iakubivskyi, I.; Schwarzkopf, G.J.; Knuuttila, O.; Väisänen, T.; Bührer, M.; Palos, M.F.; Teras, H.; Le Bonhomme, G.; Praks, J.; et al. SISPO: Space Imaging Simulator for Proximity Operations. PLoS ONE 2022, 17, e0263882. [Google Scholar] [CrossRef]
- Slavinskis, A.; Nag, S.; Observatory, T.; Mueting, J. An Initial Analysis of the Stationkeeping Tradespace for Constellations. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–11. [Google Scholar] [CrossRef]
- Huo, M.; Mengali, G.; Quarta, A. Electric Sail Thrust Model from a Geometrical Perspective. J. Guid. Control. Dyn. 2017, 41, 735–741. [Google Scholar] [CrossRef]
- Bassetto, M.; Mengali, G.; Quarta, A.A. Thrust and torque vector characteristics of axially-symmetric E-sail. Acta Astronaut. 2018, 146, 134–143. [Google Scholar] [CrossRef]
- Multi-Asteroid Touring Mission Concept for Studying Hundreds of Asteroids. Available online: https://space-travel.blog/mat-101d13b76f9b (accessed on 11 June 2023).
- Iakubivskyi, I.; Mačiulis, L.; Janhunen, P.; Dalbins, J.; Noorma, M.; Slavinskis, A. Aspects of nanospacecraft design for main-belt sailing voyage. Adv. Space Res. 2021, 67, 2957–2980. [Google Scholar] [CrossRef]
- Bock, D.; Tajmar, M. Highly miniaturized FEEP propulsion system (NanoFEEP) for attitude and orbit control of CubeSats. Acta Astronaut. 2018, 144, 422–428. [Google Scholar] [CrossRef]
- Slavinskis, A.; Janhunen, P.; Toivanen, P.; Muinonen, K.; Penttilä, A.; Granvik, M.; Kohout, T.; Gritsevich, M.; Slavinskis, A.; Pajusalu, M.; et al. Nanospacecraft fleet for multi-asteroid touring with electric solar wind sails. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–20. [Google Scholar] [CrossRef]
- Stone, N.; Raitt, W.; Wright, K. The TSS-1R electrodynamic tether experiment: Scientific and technological results. Adv. Space Res. 1999, 24, 1037–1045. [Google Scholar] [CrossRef] [Green Version]
- Slavinskis, A.; Kvell, U.; Kulu, E.; Sünter, I.; Kuuste, H.; Lätt, S.; Voormansik, K.; Noorma, M. High spin rate magnetic controller for nanosatellites. Acta Astronaut. 2014, 95, 218–226. [Google Scholar] [CrossRef]
- Janhunen, P.; Toivanen, P. A scheme for controlling the E-sail’s spin rate by the E-sail effect itself. In Proceedings of the Space Propulsion 2018 Conference, Seville, Spain, 13–18 May 2018. [Google Scholar]
- Matsakis, N.D.; Klock II, F.S. The rust language. ACM SIGAda Ada Lett. 2014, 34, 103–104. [Google Scholar] [CrossRef]
- Bevy. A Data-Driven Game Engine. Available online: https://bevyengine.org/ (accessed on 12 May 2023).
- UOM. (Units of Measurement) Crate. Available online: https://crates.io/crates/uom (accessed on 12 May 2023).
- Kallio, E.; Dyadechkin, S.; Wurz, P.; Khodachenko, M. Space weathering on the Moon: Farside-nearside solar wind precipitation asymmetry. Planet. Space Sci. 2019, 166, 9–22. [Google Scholar] [CrossRef]
- Folta, D.; Quinn, D. Lunar Frozen Orbits. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, HI, USA, 21–24 August 2006. [Google Scholar] [CrossRef]
- Lang, K.R. The Cambridge Guide to the Solar System; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Mengali, G.; Quarta, A.A.; Janhunen, P. Electric sail performance analysis. J. Spacecr. Rocket. 2008, 45, 122–129. [Google Scholar] [CrossRef]
- Bassetto, M.; Mengali, G.; Quarta, A.A. E-sail Attitude Control with Tether Voltage Modulation. Acta Astronaut. 2020, 166, 350–357. [Google Scholar] [CrossRef]
- Bassetto, M.; Quarta, A.A.; Mengali, G. Locally-optimal electric sail transfer. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 166–179. [Google Scholar] [CrossRef]
- Mengali, G.; Quarta, A.A.; Janhunen, P. Considerations of electric sailcraft trajectory design. JBIS J. Br. Interplanet. Soc. 2008, 61, 326–329. [Google Scholar]
- Quarta, A.A.; Mengali, G. Electric Sail Mission Analysis for Outer Solar System Exploration. J. Guid. Control. Dyn. 2010, 33, 740–755. [Google Scholar] [CrossRef]
- Tsyganenko, N. Modeling the Earth’s magnetospheric magnetic field confined within a realistic magnetopause. J. Geophys. Res. Space Phys. 1995, 100, 5599–5612. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GTO | Lunar Orbit | |
|---|---|---|
| Coulomb drag capabilities | Varying plasma density conditions from ionosphere to radiation belt: great for Coulomb drag science, but access to solar wind is limited | Solar wind blows continuously except for the lunar wake and except when the Moon is in the magnetosphere: perfect for E-sail demonstration |
| Launch | Commercial launches are available but not common for cubesats; requires apogee raise to 30 Earth radii | Launch opportunities are very limited but this might change due to the Artemis program |
| Radiation environment | Fly via Van Allen belt twice per orbit | Interplanetary |
| Communications | Moves fast near the LEO-level perigee, and the near-apogee communications require beyond-LEO communications | Deep space approach is necessary: can be achieved with a modest radio telescope |
| Operations | The approach changes through one orbit (twice a day) because the environmental and orbital parameters change by an order of magnitude | The relative geometry is rather simple given the Moon is visible by the ground station and the spacecraft is not on the far side |
| Tether Length (km) | Voltage (kV) | Force ( N) |
|---|---|---|
| 0.5 | 10 | 1.80 |
| 1 | 3.60 | |
| 2 | 7.20 | |
| 4 | 14.42 | |
| 0.5 | 20 | 3.76 |
| 1 | 7.51 | |
| 2 | 15.03 | |
| 4 | 30.05 |
| h (km) | (mm/s) | L (km) | Escape Day | Flight Time (Days) |
|---|---|---|---|---|
| 100 | 0.03 | 1 | ∼ | >3.5 years |
| 0.06 | 2 | 26 December 2030 | 1090 | |
| 0.12 | 4 | 20 June 2029 | 536 | |
| 500 | 0.03 | 1 | ∼ | >3.5 years |
| 0.06 | 2 | 21 August 2030 | 963 | |
| 0.12 | 4 | 25 April 2029 | 480 | |
| 1000 | 0.03 | 1 | ∼ | >3.5 years |
| 0.06 | 2 | 21 April 2030 | 841 | |
| 0.12 | 4 | 25 February 2029 | 421 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palos, M.F.; Janhunen, P.; Toivanen, P.; Tajmar, M.; Iakubivskyi, I.; Micciani, A.; Orsini, N.; Kütt, J.; Rohtsalu, A.; Dalbins, J.; et al. Electric Sail Mission Expeditor, ESME: Software Architecture and Initial ESTCube Lunar Cubesat E-Sail Experiment Design. Aerospace 2023, 10, 694. https://doi.org/10.3390/aerospace10080694
Palos MF, Janhunen P, Toivanen P, Tajmar M, Iakubivskyi I, Micciani A, Orsini N, Kütt J, Rohtsalu A, Dalbins J, et al. Electric Sail Mission Expeditor, ESME: Software Architecture and Initial ESTCube Lunar Cubesat E-Sail Experiment Design. Aerospace. 2023; 10(8):694. https://doi.org/10.3390/aerospace10080694
Chicago/Turabian StylePalos, Mario F., Pekka Janhunen, Petri Toivanen, Martin Tajmar, Iaroslav Iakubivskyi, Aldo Micciani, Nicola Orsini, Johan Kütt, Agnes Rohtsalu, Janis Dalbins, and et al. 2023. "Electric Sail Mission Expeditor, ESME: Software Architecture and Initial ESTCube Lunar Cubesat E-Sail Experiment Design" Aerospace 10, no. 8: 694. https://doi.org/10.3390/aerospace10080694
APA StylePalos, M. F., Janhunen, P., Toivanen, P., Tajmar, M., Iakubivskyi, I., Micciani, A., Orsini, N., Kütt, J., Rohtsalu, A., Dalbins, J., Teras, H., Allaje, K., Pajusalu, M., Niccolai, L., Bassetto, M., Mengali, G., Quarta, A. A., Ivchenko, N., Stude, J., ... Slavinskis, A. (2023). Electric Sail Mission Expeditor, ESME: Software Architecture and Initial ESTCube Lunar Cubesat E-Sail Experiment Design. Aerospace, 10(8), 694. https://doi.org/10.3390/aerospace10080694