
Modeling, Simulation and Control of a Spacecraft: Automated Rendezvous under Positional Constraints



Abstract
:1. Introduction
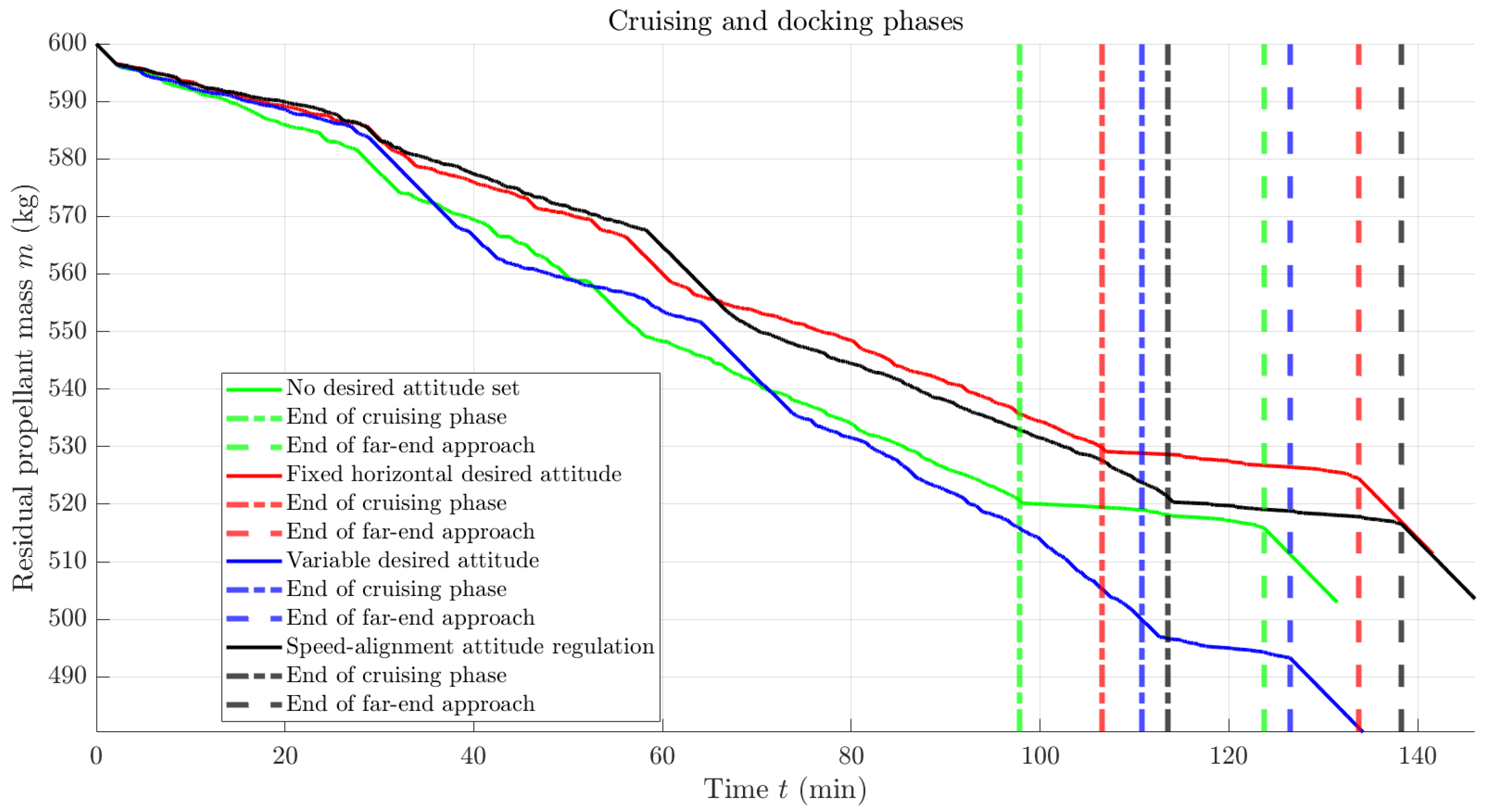
- As to what concerns positional control, in the present endeavor, we checked and corrected the sliding model control strategy to properly take into account the current attitude of the spacecraft during maneuvering, which is essential given that the thrusters are fixed to the hull of the spacecraft. Moreover, we modified the shape of the artificial potentials that guide the motion of the spacecraft and designed different control laws, with the aim of improving maneuverability and to diminish cold gas consumption. Such control laws are contrasted to each other by numerical simulations in order to determine which one is most suitable in a rendezvous scenario. In addition, we incorporated a cardioid-shape barrier to the pure artificial potential control strategy to benefit from both techniques at once.
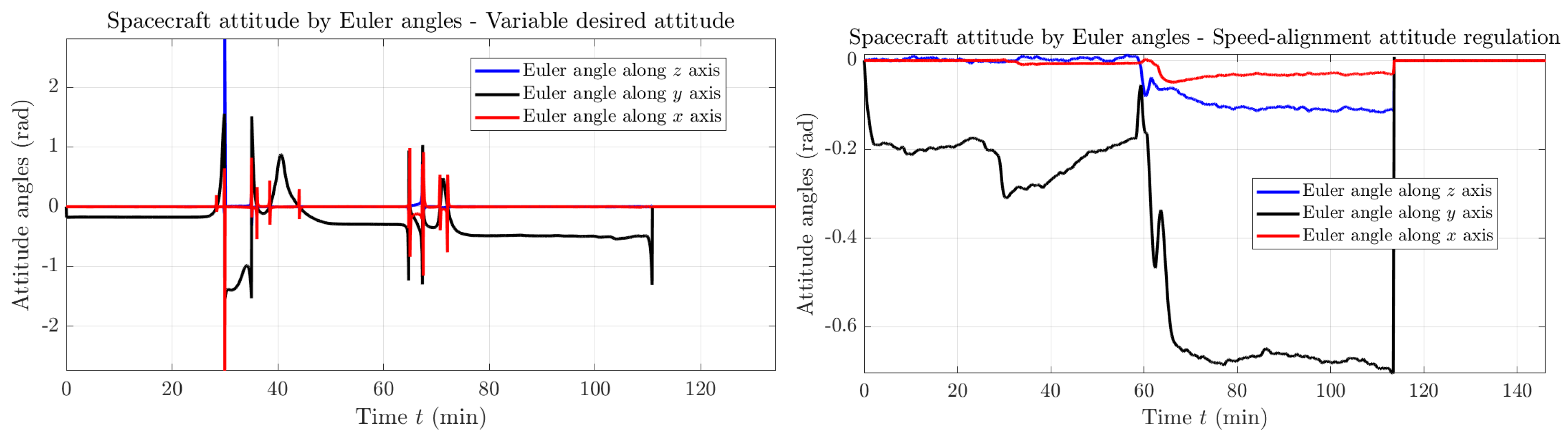
- As to what concerns attitude control, a distinguishing feature of the present authors’ research activity is that orientations in space are represented by rotation matrices and that the attitude control strategies are represented by vector fields on the tangent bundle of the special orthogonal group, in contrast to the cumbersome quaternion representation. These entities are treated as a whole, without any reference to any basis or local coordinate system. As to what concerns the choice of attitude control law, even in this case, a number of different strategies are contrasted to one another by numerical simulations in order to discriminate the best-performing one in the present scenario.
2. Reference Frames, Physical Model and Equations of Motion of a Spacecraft
2.1. Application Scenario and Reference Frames
2.2. Physical Model and Equations of Motion
2.3. Numerical Recipes
3. Rendezvous Maneuver under Positional Constraints
3.1. Control Strategy during a Cruising Phase in the Presence of Physical Obstacles
3.2. Virtual Potential Design
3.3. Speed Intensity Determination
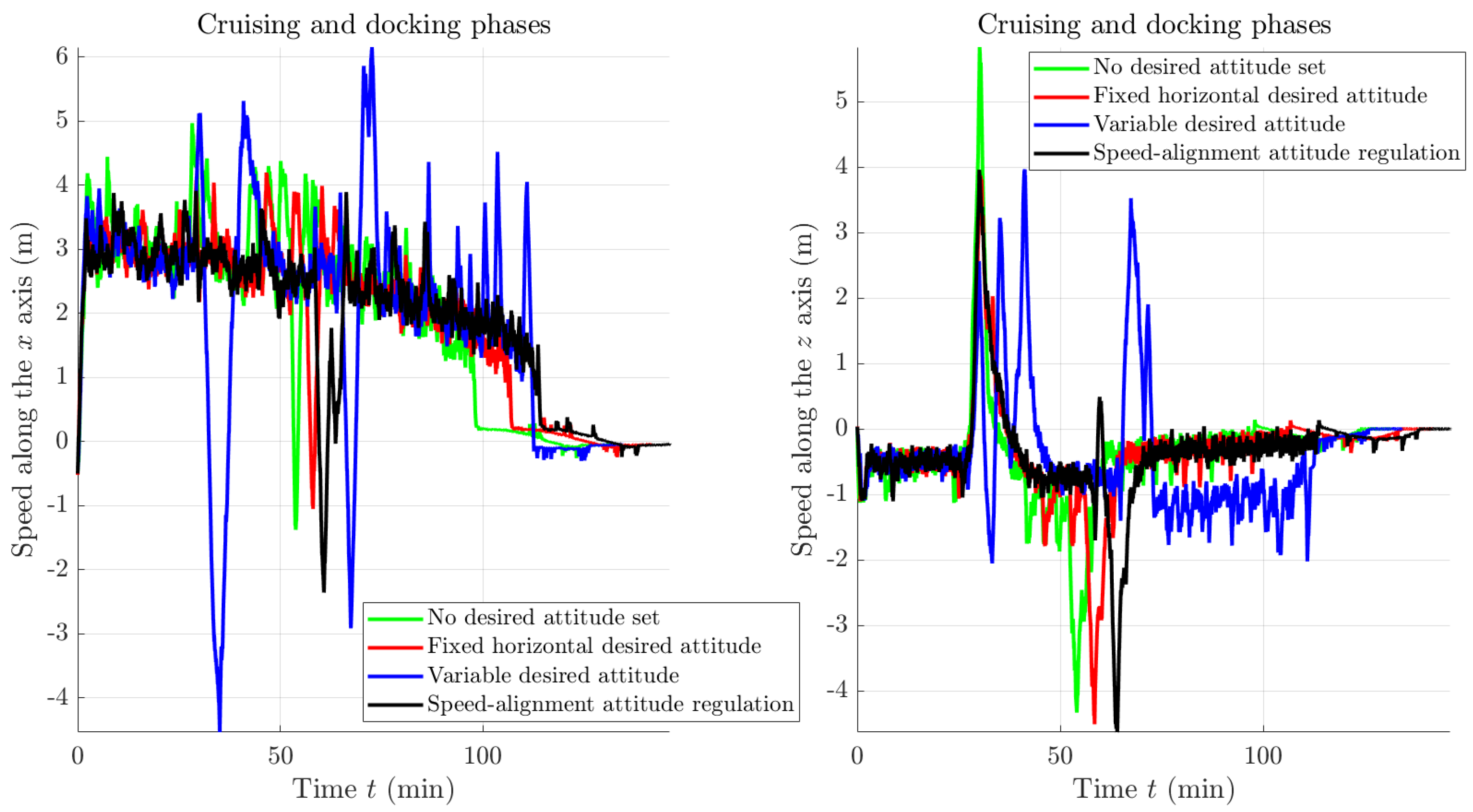
3.4. Attitude Control during a Cruising Phase
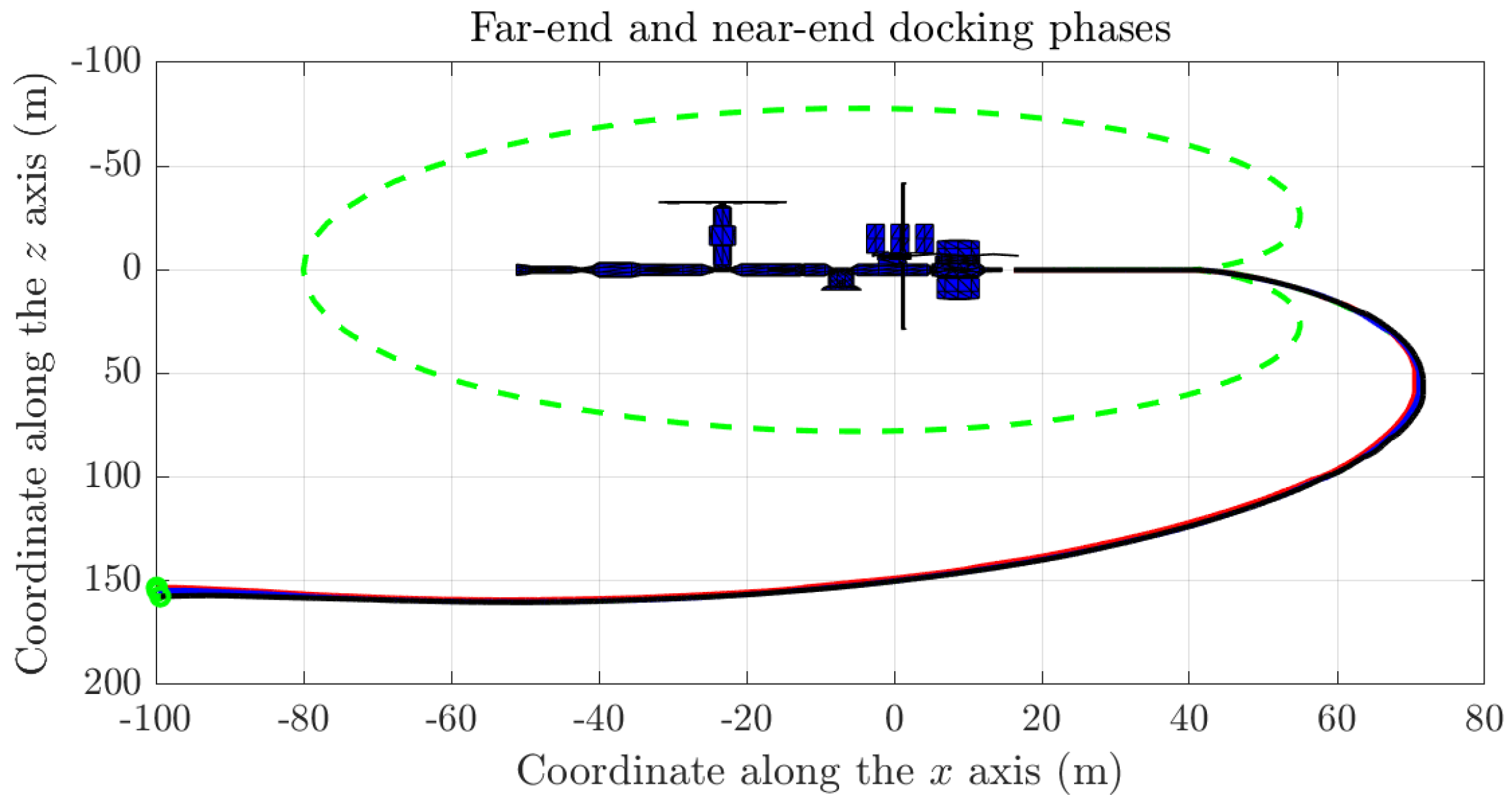
3.5. Final Guidance for Docking in the Absence of External Obstacles
3.6. Alignment to a Docking Axis during Final Guidance
4. Results of Numerical Simulations
4.1. Numerical Simulations
4.2. Illustration of a Complete Rendezvous Maneuver
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lopez, I.; McInnes, C.R. Autonomous rendezvous using artificial potential function guidance. J. Guid. Control. Dyn. 1995, 18, 237–241. [Google Scholar] [CrossRef]
- Rumford, T.E. Demonstration of autonomous rendezvous technology (DART) project summary. In Space Systems Technology and Operations; Tchoryk, P., Jr., Shoemaker, J., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2003; Volume 5088, pp. 10–19. [Google Scholar] [CrossRef]
- Bloise, N.; Capello, E.; Dentis, M.; Punta, E. Obstacle avoidance with potential field applied to a rendezvous maneuver. Appl. Sci. 2017, 7, 1042. [Google Scholar] [CrossRef]
- Bongers, A.; Torres, J. Orbital debris and the market for satellites. Ecol. Econ. 2023, 209, 107831. [Google Scholar] [CrossRef]
- NASA’s Orbital Debris Program Office (ODPO). Available online: https://orbitaldebris.jsc.nasa.gov/ (accessed on 7 January 2024).
- Roberson, R.E.; Schwertassek, R. Dynamics of Multibody Systems; Springer: Berlin/Heidelberg, Germany, 1988. [Google Scholar]
- Lee, U.; Mesbahi, M. Feedback control for spacecraft reorientation under attitude constraints via convex potentials. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2578–2592. [Google Scholar] [CrossRef]
- Hu, Q.; Chi, B.; Akella, M.R. Anti-unwinding attitude control of spacecraft with forbidden pointing constraints. J. Guid. Control Dyn. 2019, 42, 822–835. [Google Scholar] [CrossRef]
- Cheng, H.; Gupta, K.C. An historical note on finite rotations. J. Appl. Mech. 1989, 56, 139–145. [Google Scholar] [CrossRef]
- Fiori, S. Model Formulation Over Lie Groups and Numerical Methods to Simulate the Motion of Gyrostats and Quadrotors. Mathematics 2019, 7, 935. [Google Scholar] [CrossRef]
- Fiori, S.; Cervigni, I.; Ippoliti, M.; Menotta, C. Extension of a PID control theory to Lie groups applied to synchronising satellites and drones. IET Control Theory Appl. 2020, 14, 2628–2642. [Google Scholar] [CrossRef]
- Fiori, S.; Del Rossi, L. Minimal control effort and time Lie-group synchronisation design based on proportional-derivative control. Int. J. Control 2022, 95, 138–150. [Google Scholar] [CrossRef]
- Huang, L. Velocity planning for a mobile robot to track a moving target—A potential field approach. Robot. Auton. Syst. 2009, 57, 55–63. [Google Scholar] [CrossRef]
- Kamon, I.; Rivlin, E. Sensory-Based Motion Planning with Global Proofs. IEEE Trans. Robot. Autom. 1997, 13, 814–822. [Google Scholar] [CrossRef]
- Lee, M.C.; Park, M.G. Artificial potential field based path planning for mobile robots using a virtual obstacle concept. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003; Volume 2, pp. 735–740. [Google Scholar] [CrossRef]
- Levine, H.; Rappel, W.J.; Cohen, I. Self-organization in systems of self-propelled particles. Phys. Rev. E 2000, 63, 017101. [Google Scholar] [CrossRef]
- Rimon, E.; Koditschek, D. Exact robot navigation using artificial potential functions. IEEE Trans. Robot. Autom. 1992, 8, 501–518. [Google Scholar] [CrossRef]
- Nguyen, B.; Chuang, Y.L.; Tung, D.; Hsieh, C.; Jin, Z.; Shi, L.; Marthaler, D.; Bertozzi, A.; Murray, R. Virtual attractive-repulsive potentials for cooperative control of second order dynamic vehicles on the Caltech MVWT. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 1084–1089. [Google Scholar]
- Fiori, S.; Bigelli, L.; Polenta, F. Lie-Group Type Quadcopter Control Design by Dynamics Replacement and the Virtual Attractive-Repulsive Potentials Theory. Mathematics 2022, 10, 1104. [Google Scholar] [CrossRef]
- Kasiri, A.; Fani Saberi, F. Coupled position and attitude control of a servicer spacecraft in rendezvous with an orbiting target. Sci. Rep. 2023, 13, 4182. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y. Coupled orbital and attitude control in spacecraft rendezvous and soft docking. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 3109–3119. [Google Scholar] [CrossRef]
- Zappulla, R.; Park, H.; Virgili-Llop, J.; Romano, M. Real-Time Autonomous Spacecraft Proximity Maneuvers and Docking Using an Adaptive Artificial Potential Field Approach. IEEE Trans. Control Syst. Technol. 2019, 27, 2598–2605. [Google Scholar] [CrossRef]
- Mancini, M.; Bloise, N.; Capello, E.; Punta, E. Sliding Mode Control Techniques and Artificial Potential Field for Dynamic Collision Avoidance in Rendezvous Maneuvers. IEEE Control Syst. Lett. 2020, 4, 313–318. [Google Scholar] [CrossRef]
- Hua, B.; He, J.; Zhang, H.; Wu, Y.; Chen, Z. Spacecraft attitude reorientation control method based on potential function under complex constraints. Aerosp. Sci. Technol. 2024, 144, 108738. [Google Scholar] [CrossRef]
- Krejci, D.; Jenkins, M.G.; Lozano, P. Staging of electric propulsion systems: Enabling an interplanetary Cubesat. Acta Astronaut. 2019, 160, 175–182. [Google Scholar] [CrossRef]
- Levchenko, I.; Baranov, O.; Pedrini, D.; Riccardi, C.; Roman, H.E.; Xu, S.; Lev, D.; Bazaka, K. Diversity of Physical Processes: Challenges and Opportunities for Space Electric Propulsion. Appl. Sci. 2022, 12, 11143. [Google Scholar] [CrossRef]
- Bloch, A.; Krishnaprasad, P.; Marsden, J.; de Alvarez, G. Stabilization of rigid body dynamics by internal and external torques. Automatica 1992, 28, 745–756. [Google Scholar] [CrossRef]
- Clohessy, W.; Wiltshire, R. Terminal guidance system for satellite rendezvous. J. Aerosp. Sci. 1960, 27, 653–658. [Google Scholar] [CrossRef]
- Ries, J.; Eanes, R.; Shum, C.; Watkins, M. Progress in the determination of the gravitational coefficient of the Earth. Geophys. Res. Lett. 1992, 19, 529–531. [Google Scholar] [CrossRef]
- Laker, R.; Horbury, T.S.; Bale, S.D.; Matteini, L.; Woolley, T.; Woodham, L.D.; Stawarz, J.E.; Davies, E.E.; Eastwood, J.P.; Owens, M.J.; et al. Multi-spacecraft study of the solar wind at solar minimum: Dependence on latitude and transient outflows. Astron. Astrophys. 2021, 652, A105. [Google Scholar] [CrossRef]
- Fiori, S. Manifold Calculus in System Theory and Control—Fundamentals and First-Order Systems. Symmetry 2021, 13, 2092. [Google Scholar] [CrossRef]
- Fiori, S.; Sabatini, L.; Rachiglia, F.; Sampaolesi, E. Modeling, simulation and control of a spacecraft: Automated reorientation under directional constraints. Acta Astronaut. 2024, 216, 214–228. [Google Scholar] [CrossRef]
- Sutton, G.; Biblarz, O. Rocket Propulsion Elements—An Introduction to the Engineering of Rockets, 7th ed.; Wiley-Interscience: Hoboken, NJ, USA, 2000. [Google Scholar]
- Bartoszewicz, A.; Żuk, J. Sliding mode control—Basic concepts and current trends. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 3772–3777. [Google Scholar] [CrossRef]
- Spurgeon, S. Sliding mode control: A tutorial. In Proceedings of the 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 2272–2277. [Google Scholar] [CrossRef]
- Utkin, V. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 1993, 40, 23–36. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Birkhäuser: New York, NY, USA, 2004. [Google Scholar]
- Wei, Z.; Wen, H.; Hu, H.; Jin, D. Ground experiment on rendezvous and docking with a spinning target using multistage control strategy. Aerosp. Sci. Technol. 2020, 104, 105967. [Google Scholar] [CrossRef]
- Wang, G.; Xie, Z.; Mu, X.; Li, S.; Yang, F.; Yue, H.; Jiang, S. Docking Strategy for a Space Station Container Docking Device Based on Adaptive Sensing. IEEE Access 2019, 7, 100867–100880. [Google Scholar] [CrossRef]
- Zhang, T.; Stackhouse, P.W.; Macpherson, B.; Mikovitz, J.C. A solar azimuth formula that renders circumstantial treatment unnecessary without compromising mathematical rigor: Mathematical setup, application and extension of a formula based on the subsolar point and atan2 function. Renew. Energy 2021, 172, 1333–1340. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Initial spacecraft mass | 600 (kg) | |
| Maximum allowable speed | 6 (m/s) | |
| Inertia coefficient | 144 (kg·) | |
| Propeller’s thrust | 10 (N) | |
| Spacecraft’s frontal area | S | 1.44 () |
| Drag coefficient | 2.20 (−) | |
| Specific impulse | 220 (s) | |
| Gravitational acceleration | g | 9.81 () |
| Atmosphere density | () | |
| Orbit radius | r | (m) |
| Gravitational parameter | (/) |
| Description | Value |
|---|---|
| Initial location | (m) |
| Initial speed | (m/s) |
| Target location | (m) |
| Safety Radius (m) | Location (m) |
|---|---|
| (m) | (m) |
| (m) | (m) |
| (m) | (m) |
| (m) | (m) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fiori, S.; Rachiglia, F.; Sabatini, L.; Sampaolesi, E. Modeling, Simulation and Control of a Spacecraft: Automated Rendezvous under Positional Constraints. Aerospace 2024, 11, 245. https://doi.org/10.3390/aerospace11030245
Fiori S, Rachiglia F, Sabatini L, Sampaolesi E. Modeling, Simulation and Control of a Spacecraft: Automated Rendezvous under Positional Constraints. Aerospace. 2024; 11(3):245. https://doi.org/10.3390/aerospace11030245
Chicago/Turabian StyleFiori, Simone, Francesco Rachiglia, Luca Sabatini, and Edoardo Sampaolesi. 2024. "Modeling, Simulation and Control of a Spacecraft: Automated Rendezvous under Positional Constraints" Aerospace 11, no. 3: 245. https://doi.org/10.3390/aerospace11030245
APA StyleFiori, S., Rachiglia, F., Sabatini, L., & Sampaolesi, E. (2024). Modeling, Simulation and Control of a Spacecraft: Automated Rendezvous under Positional Constraints. Aerospace, 11(3), 245. https://doi.org/10.3390/aerospace11030245