
Validation of a Discontinuous Galerkin Implementation of the Time-Domain Linearized Navier–Stokes Equations for Aeroacoustics


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Linearized Navier–Stokes Equations
2.1. General Coordinate Formulation
2.2. Axisymmetric Formulation
3. Discontinuous Galerkin Method
3.1. Spatial Discretization
3.2. Time Integration
3.3. Boundary Conditions
4. Line Source in an Incompressible Linear Shear Flow
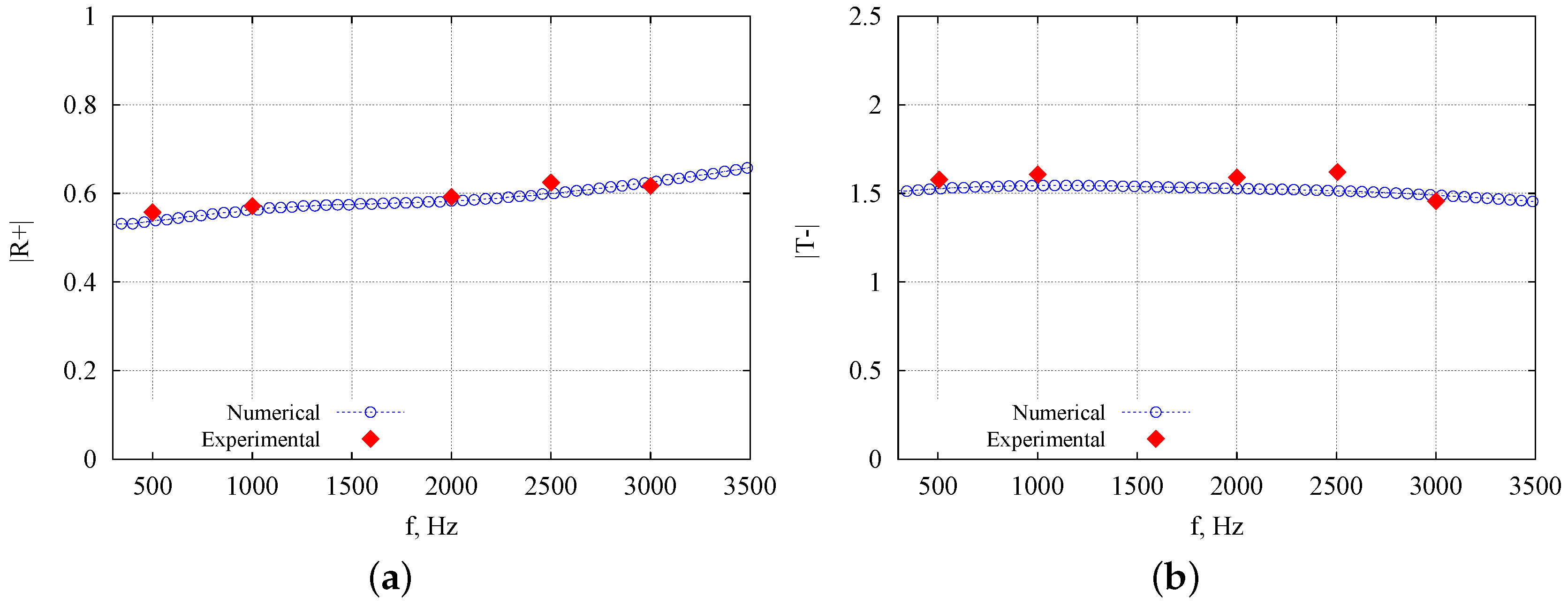
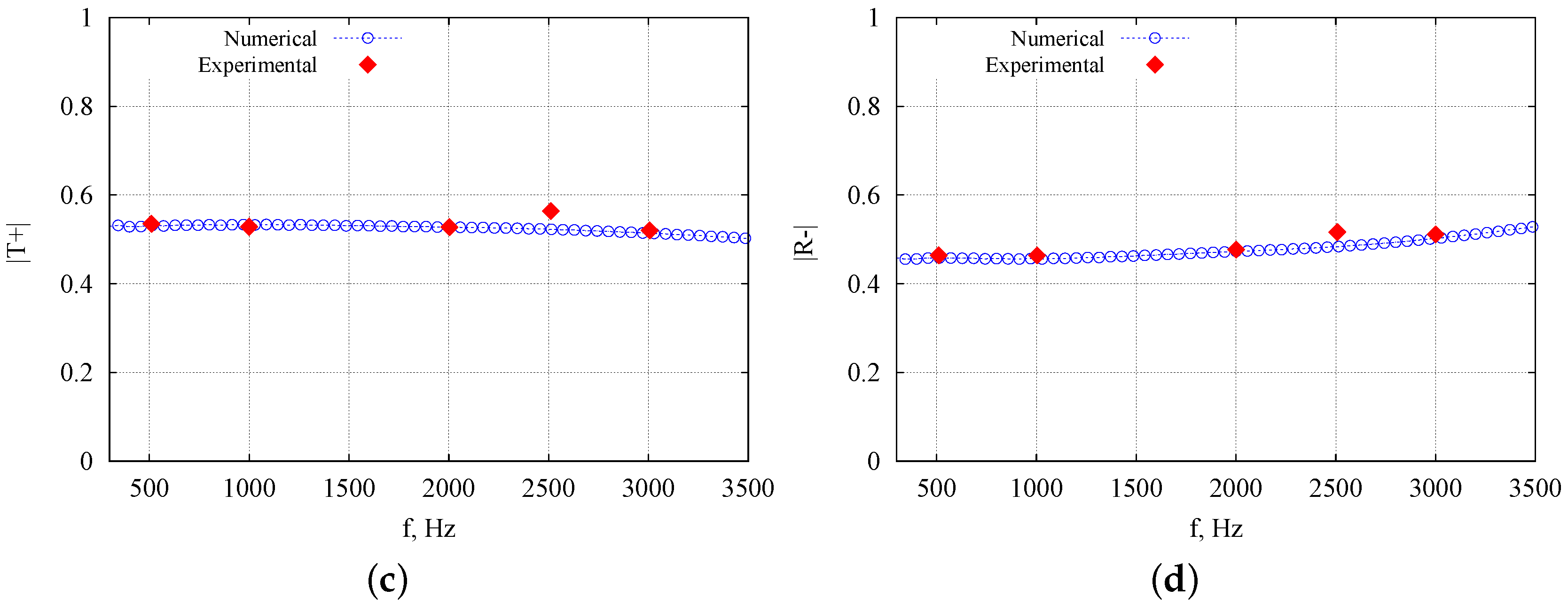
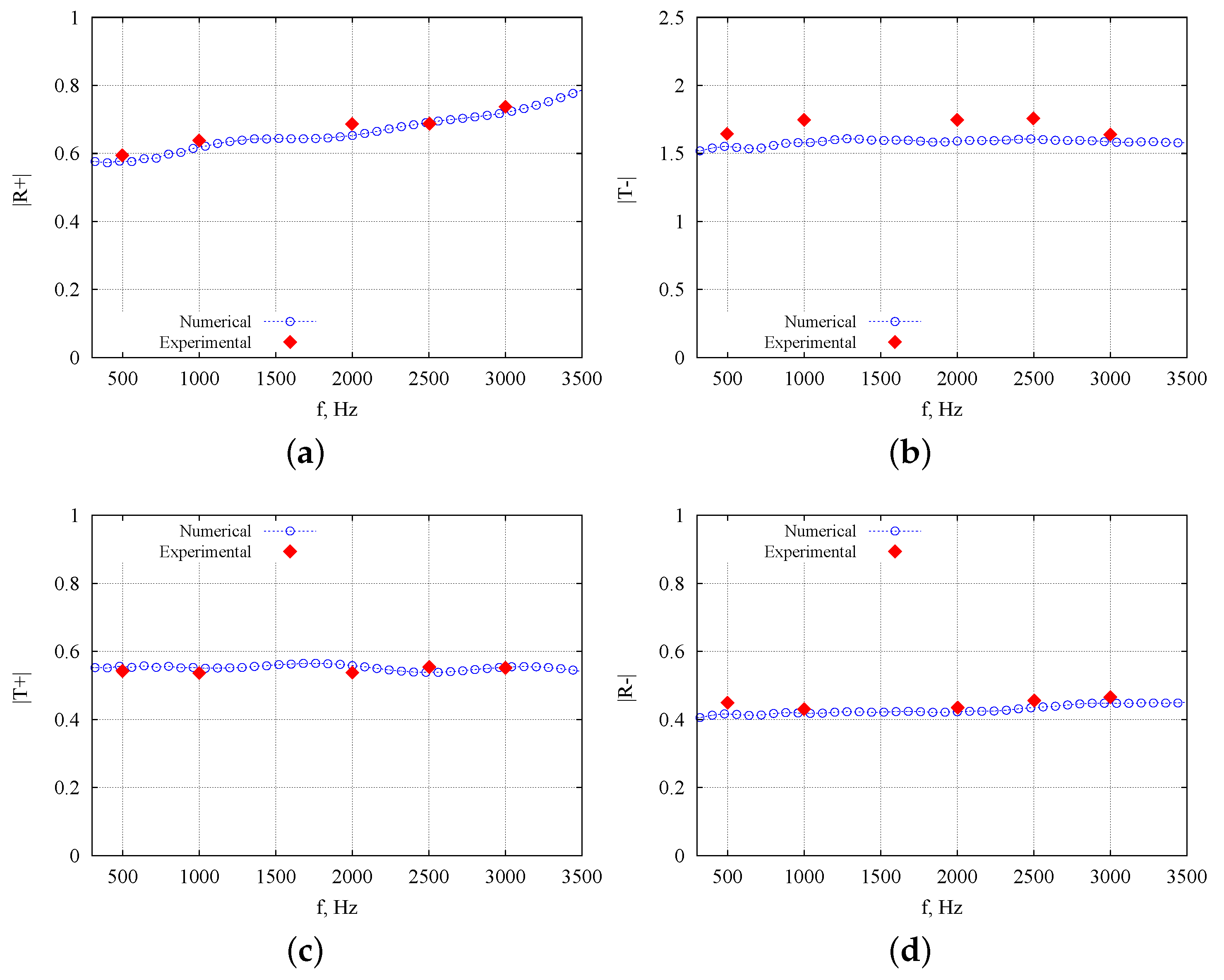
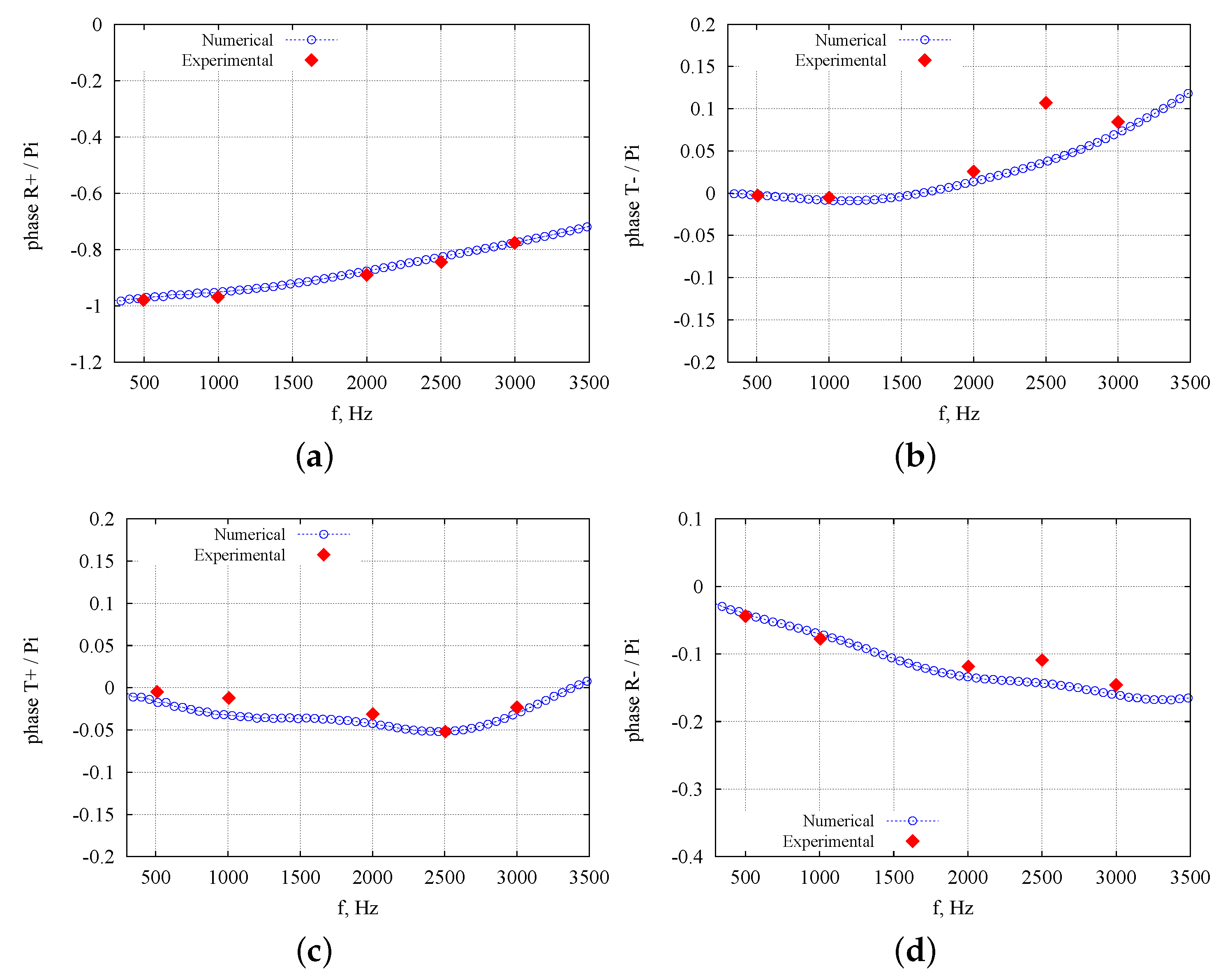
5. Scattering Matrix for a Sudden Area Discontinuity in a Cylindrical Duct in the Presence of a Mean Flow
5.1. Time Domain Wave Packet
5.2. Acoustic and Vortical Modes
5.3. Scattering Matrix
6. Conclusions
Conflicts of Interest
References
- Goldstein, M. Aeroacoustics; McGraw-Hill: New York, NY, USA, 1976. [Google Scholar]
- Tam, C.K.W.; Webb, J.C. Dispersion-relation-preserving finite difference schemes for computational acoustics. J. Comput. Phys. 1993, 107, 262–281. [Google Scholar] [CrossRef]
- Lele, S.K. Compact finite difference schemes with spectral-like resolution. J. Comput. Phys. 1992, 103, 16–42. [Google Scholar] [CrossRef]
- Patera, A.T. A spectral element method for fluid dynamics—Laminar flow in a channel expansion. J. Comput. Phys. 1984, 54, 468–488. [Google Scholar] [CrossRef]
- Reed, W.H.; Hill, T.R. Triangular methods for the neutron transport equation. J. Sci. Comput. 2007, 32, 223–262. [Google Scholar]
- Bassi, F.; Rebay, S. A high-order accurate discontinuous finite element method for the numerical solution of the compressible Navier–Stokes equations. J. Comput. Phys. 1997, 131, 267–279. [Google Scholar] [CrossRef]
- Cockburn, B.; Karniadakis, G.; Shu, C.W. Discontinuous Galerkin Methods. Theory, Computation and Applications; Springer-Verlag: Berlin, Heidelberg, Germany, 2000. [Google Scholar]
- Kierkegaard, A.; Boij, S.; Efraimsson, G. A frequency domain linearized Navier-Stokes equations approach to acoustic propagation in flow ducts with sharp edges. J. Acoust. Soc. Am. 2010, 127, 710–719. [Google Scholar] [CrossRef]
- Holmberg, A.; Kierkegaard, A.; Weng, C. A frequency domain linearized Navier-Stokes method including acoustic damping by eddy viscosity using RANS. J. Sound Vib. 2015, 346, 229–247. [Google Scholar] [CrossRef]
- Toulorge, T.; de Roeck, W.; Denayer, H.; Desmet, W. Computational aeroacoustic characterization of different orifice geometries under grazing flow conditions. In Proceedings of the ISMA2012-USD2012 Conference, Leuven, Belgium, 17–19 September 2012.
- Denayer, H.; de Roeck, W.; Desmet, W.; Tournadre, J.; Martínez-Lera, P. Combined numerical and experimental study of a slit resonator under grazing flow. In Proceedings of the 20th AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 16–20 June 2014; Volume AIAA, pp. 2014–2959.
- Della Ratta Rinaldi, R.; Iob, A.; Arina, R. An efficient discontinuous Galerkin method for aeroacoustic propagation. Int. J. Num. Meth. Fluids 2012, 69, 1473–1495. [Google Scholar] [CrossRef]
- Berland, J.; Bogey, C.; Bailly, C. Low-dissipation and low-dispersion fourth-order runge-kutta algorithm. Comput. Fluids 2006, 35, 1459–1463. [Google Scholar] [CrossRef]
- Richards, S.K.; Zhang, S.K.; Chen, X.X.; Nelson, P.A. The evaluation of non-reflecting boundary conditions for duct acoustic computation. J. Sound Vib. 2004, 270, 539–557. [Google Scholar] [CrossRef]
- Rienstra, S.W.; Darau, M.; Brambley, E.J. The trailing vorticity field behind a line source in two-dimensional incompressible linear shear flow. J. Fluid Mech. 2013, 720, 618–636. [Google Scholar] [CrossRef]
- Ronneberger, D. Theoretical and Experimental Investigations of Sound Propagation in Flow Ducts with Area Expansion and Perforated Plates; Technical Report, DFG-Abschlussbericht; Drittes Physikalisches Institute der Universititat Gottingen: Gottingen, Germany, 1987. [Google Scholar]
- Ewert, R.; Schroder, W. Acoustic perturbation equations based on flow decompostion via sources filtering. J. Comput. Phys. 2003, 188, 365–398. [Google Scholar] [CrossRef]
- Yan, J.; Shu, C.W. Local discontinuous Galerkin method for partial differential equations with higher order derivatives. J. Sci. Comput. 2002, 17, 27–47. [Google Scholar] [CrossRef]
- Hesthaven, J.S.; Warburton, T. Nodal-high order on unstructured grids. Time-domain solution of the maxwell’s equations. J. Comput. Phys. 2002, 181, 186–221. [Google Scholar] [CrossRef]
- Hesthaven, J.S.; Warburton, T. Nodal-Discontinuous Galerkin Methods: Algorithm, Analysis and Applications; Springer: New York, NY, USA, 2008. [Google Scholar]
- Ainsworth, M. Dispersive and dissipative behaviour of high order discontinuous Galerkin finite element method. J. Comput. Phys. 2004, 198, 106–130. [Google Scholar] [CrossRef]
- Douglas, J.; Dupont, T. Interior penalty procedures for elliptic and parabolic galerkin methods. In Computing Methods in Applied Science (Second International Sympos., Versailles, 1975), Lecture Notes in Physics; Springer: Berlin, Heidelberg, Germany, 1976; Volume 58, pp. 207–216. [Google Scholar]
- Hu, F.Q.; Hussaini, M.Y.; Manthey, J.L. Low-dissipation and low-dispersion Runge–Kutta schemes for computational acoustics. J. Comput. Phys. 1996, 124, 91–177. [Google Scholar] [CrossRef]
- Williamson, J.H. Low-storage Runge-Kutta schemes. J. Comput. Phys. 1980, 35, 48–56. [Google Scholar] [CrossRef]
- Appelö, D.; Colonius, T. A high-order super-grid-scale absorbing layer and its application to linear hyperbolic systems. J. Comput. Phys. 2009, 228, 4200–4217. [Google Scholar] [CrossRef]
- Van der Vegt, J.J.W.; van der Ven, H. Slip flow boundary conditions in discontinuous Galerkin discretizations of the Euler equations of gas dynamics. In Proceedings Fifth World Congress on Computational Mechanics; Mang, H.A., Rammerstorfer, F., Eberhardsteiner, J., Eds.; Vienna University of Technology: Vienna, Austria, 2002; pp. 1–16. [Google Scholar]
- Brambley, E.J.; Darau, M.; Rienstra, S.W. The critical layer in linear-shear boundary layers over acoustic linings. J. Fluid Mech. 2012, 710, 545–568. [Google Scholar] [CrossRef]
- Boij, S.; Nilsson, B. Reflection of sound at area expasion in a flow duct. J. Sound Vib. 2003, 260, 477–498. [Google Scholar] [CrossRef]
- Boij, S.; Nilsson, B. Scattering and absorption of sound at flow duct expansions. J. Sound Vib. 2006, 289, 995–1004. [Google Scholar] [CrossRef]
- Shi, H.; Arina, R.; Della Ratta, R.; Iob, A.; Tonon, D. Numerical prediction method for the acoustic characterization of netwok elements in presence of mean flow. In Proceedings of the 18th AIAA/CEAS Aeroacoustics Conference, Colorado Springs, CO, USA, 4–6 June 2012; Volume AIAA, pp. 2012–2193.
- Kierkegaard, A.; Boij, S.; Efraimsson, G. Simulations of the scattering of sound waves at a sudden area expansion. J. Sound Vib. 2012, 331, 1068–1083. [Google Scholar] [CrossRef]
- Hu, F.Q.; Li, X.D.; Li, X.Y.; Jiang, M. Time domain wave packet method and suppression of instability waves in aeroacoustic computation. In Proceedings of the 17th AIAA/CEAS Aeroacoustics Conference, Portland, OR, USA, 6–8 June 2011; Volume AIAA, pp. 2011–2891.
- Lung, T.Y.; Doige, A.G. A time-averaging transient testing method for acoutic properties of piping systems and mufflers with flow. J. Acoust. Soc. Am. 1983, 73, 867–876. [Google Scholar] [CrossRef]
- Munjal, M.L.; Doige, A.G. Theory of a two source-location method for direct experimental evaluation of the four-pole parameters of an aeroacoustic element. J. Sound Vib. 1990, 141, 323–333. [Google Scholar] [CrossRef]
- Abom, M. Error analysis fo 2-microphone measurements in duct with flow. J. Acoust. Soc. Am. 1988, 83, 2429–2438. [Google Scholar] [CrossRef]
- Kierkegaard, A. Frequency Domain Linearized Navier-Stokes Equations Methods for Low Mach Number Internal Aeroacoustics. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, May 2011. [Google Scholar]














© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arina, R. Validation of a Discontinuous Galerkin Implementation of the Time-Domain Linearized Navier–Stokes Equations for Aeroacoustics. Aerospace 2016, 3, 7. https://doi.org/10.3390/aerospace3010007
Arina R. Validation of a Discontinuous Galerkin Implementation of the Time-Domain Linearized Navier–Stokes Equations for Aeroacoustics. Aerospace. 2016; 3(1):7. https://doi.org/10.3390/aerospace3010007
Chicago/Turabian StyleArina, Renzo. 2016. "Validation of a Discontinuous Galerkin Implementation of the Time-Domain Linearized Navier–Stokes Equations for Aeroacoustics" Aerospace 3, no. 1: 7. https://doi.org/10.3390/aerospace3010007
APA StyleArina, R. (2016). Validation of a Discontinuous Galerkin Implementation of the Time-Domain Linearized Navier–Stokes Equations for Aeroacoustics. Aerospace, 3(1), 7. https://doi.org/10.3390/aerospace3010007