Agent-Based Distributed Planning and Coordination for Resilient Airport Surface Movement Operations


Abstract
:1. Introduction
2. The Distributed Planning and Coordination Mechanisms
2.1. CBS MAPF Algorithm
2.2. Merging Point Highways (MP HWYs)
2.3. Conflict-Based Highways (CB HWYs)
3. Schiphol Airport Surface Movement System
4. The Multi-Agent System Model
4.1. Environment Specification
4.2. Agent Specifications
4.2.1. Entry/Exit Agents
4.2.2. Aircraft Agents
4.2.3. ATC Agents
| Algorithm 1 Forward Simulation of the Aircraft Agent’s route |
| Input: Localized information of the Aircraft Agent Output: Predicted time point, , of unimpeded passing the Agent
|
4.2.4. Airport Operation Status Agent
5. Verification and Validation
6. Evaluating Resilient Behaviour
7. Results and Analysis
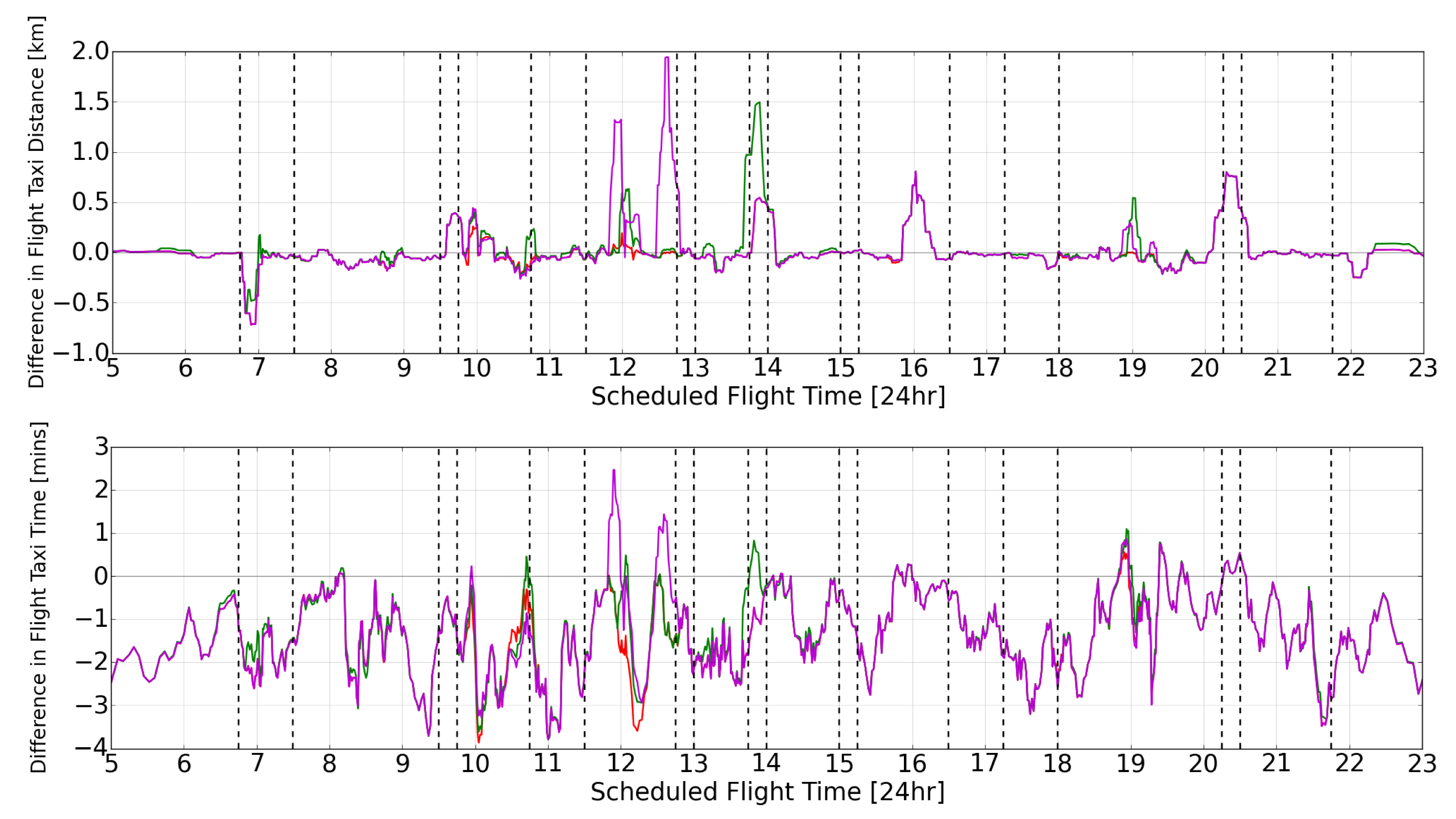
7.1. Taxi Time and Taxi Distance Behaviour
7.2. Evaluating Resilience
8. Discussion
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- ICAO. Annex 11: Air Traffic Services; Technical Report; International Civil Aviation Organization: Montreal, QC, Canada, 2001. [Google Scholar]
- Malandri, C.; Mantecchini, L.; Reis, V. Aircraft turnaround and industrial actions: How ground handlers’ strikes affect airport airside operational efficiency. J. Air Transp. Manag. 2019, 78, 23–32. [Google Scholar] [CrossRef]
- Postorino, M.N.; Mantecchini, L.; Malandri, C.; Paganelli, F. A methodological framework to evaluate the impact of disruptions on airport turnaround operations: A case study. Case Stud. Transp. Policy 2020, in press. [Google Scholar] [CrossRef]
- Janic, M. Modeling Airport Operations Affected by a Large-Scale Disruption. J. Transp. Eng. 2009, 135. [Google Scholar] [CrossRef]
- Malandri, C.; Mantecchini, L.; Paganelli, F.; Postorino, M.N. Impacts of unplanned aircraft diversions on airport ground operations. Transp. Res. Procedia 2020, in press. [Google Scholar]
- Pejovic, T.; Noland, R.B.; Williams, V.; Toumi, R. A tentative analysis of the impacts of an airport closure. J. Air Transp. Manag. 2009, 15, 241–248. [Google Scholar] [CrossRef]
- Postorino, M.N.; Mantecchini, L.; Paganelli, F. Improving taxi-out operations at city airports to reduce CO2 emissions. Transp. Policy 2019, 80, 167–176. [Google Scholar] [CrossRef]
- Hollnagel, E.; Paries, J.; Woods, D.D.; Wreathall, J. Resilience Engineering in Practice: A Guidebook; Ashgate: Farnham, UK, 2011. [Google Scholar]
- Majumdar, A.; Ochieng, W. Factors Affecting Air Traffic Controller Workload: Multivariate Analysis Based on Simulation Modeling of Controller Workload. Transp. Res. Rec. 2002, 1788, 58–69. [Google Scholar] [CrossRef]
- Wickens, C.; Mavor, A.; Mcgee, J. Flight to the Future: Human Factors in Air Traffic Control; The National Academic Press: Washington, DC, USA, 1997. [Google Scholar]
- EUROCONTROL. European ATM Master Plan: Executive View; Technical Report; Publications Office of the European Union: Luxembourg, 2020; ISBN 978-92-9216-134-7. [Google Scholar] [CrossRef]
- European Aviation Artificial Intelligence High Level Group. The FLY AI Report: Demystifying and Accelerating AI in Aviation/ATM; Technical Report; EUROCONTROL: Brussels, Belgium, 2020. [Google Scholar]
- Noortman, T. Agent-Based Modelling of an Airport’s Ground Surface Movement Operation. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
- Udluft, H. Decentralization in Air Transportation. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2017. [Google Scholar]
- Dou, C.; Hao, D.; Jin, B.; Wang, W.; An, N. Multi-agent-system-based decentralized coordinated control for large power systems. Int. J. Electr. Power Energy Syst. 2014, 58, 130–139. [Google Scholar] [CrossRef]
- King, J.; Pretty, R.; Gosine, R. Coordinated execution of tasks in a multiagent environment. IEEE Trans. Syst. Man Cybern. 2003, 33, 615–619. [Google Scholar] [CrossRef]
- Camara, A.; Silva, D.C.; Oliveira, E.; Abreu, P.H. Comparing centralized and decentralized multi-agent approaches to air traffic control. In Proceedings of the Proceedings of the 28th European Simulation and Modelling Conference, Porto, Portugal, 22–24 October 2014; pp. 189–193. [Google Scholar]
- Bold, B. Generalized Partial Global Planning (GPGP); Technical Report; University of Wuerzburg: Würzburg, Germany, 2005. [Google Scholar]
- Claes, R.; Holvoet, T.; Weyns, D. A Decentralized Approach for Anticipatory Vehicle Routing Using Delegate Multiagent Systems. IEEE Trans. Intell. Transp. Syst. 2011, 12, 364–373. [Google Scholar] [CrossRef]
- Fines, K. Agent-based Distributed Planning and Coordination for Resilient Airport Surface Movement Operations. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2019. [Google Scholar]
- de Wilde, B.; ter Mors, A.W.; Witteveen, C. Push and Rotate: A Complete Multi-agent Pathfinding Algorithm. J. Artif. Intell. Res. 2014, 51, 443–492. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.H.C.; Botea, A. MAPP: A Scalable Multi-Agent Path Planning Algorithm with Tractability and Completeness Guarantees. J. Artif. Intell. Res. 2011, 42, 55–90. [Google Scholar]
- Honig, W.; Kumar, T.K.S.; Cohen, L.; Ma, H.; Xu, H.; Ayanian, N.; Koenig, S. Multi-Agent Path Finding with Kinematic Constraints. In Proceedings of the Twenty-Sixth International Conference on Automated Planning and Scheduling (ICAPS 2016), London, UK, 12–17 June 2016; pp. 477–485. [Google Scholar]
- Sharon, G.; Stern, R.; Felner, A.; Sturtevant, N.R. Conflict-based search for optimal multi-agent pathfinding. Artif. Intell. 2015, 219, 40–66. [Google Scholar] [CrossRef]
- Pumpuni-Lenss, G.; Blackburn, T.; Garstenauer, A. Resilience in Complex Systems: An Agent-Based Approach. Syst. Eng. 2017, 20, 158–172. [Google Scholar] [CrossRef]
- Air Traffic Control The Netherlands. Available online: http://www.ais-netherlands.nl/aim/2018-10-25-AIRAC/html/index-en-GB.html (accessed on 25 October 2018).
- Bergenhem, C.; Shladover, S.; Coelingh, E.; Englund, C.; Tsugawa, S. Overview of platooning systems. In Proceedings of the 19th ITS World Congress, Vienna, Austria, 29 October 2012. [Google Scholar]
- Cohen, L.; Uras, T.; Koenig, S. Feasibility Study: Using Highways for Bounded-Suboptimal Multi-Agent Path Finding. In Proceedings of the Eighth Annual Symposium on Combinatorial Search, Dead Sea, Israel, 11–13 June 2015. [Google Scholar]
- Civil Air Navigation Services Organisation. Recommended Key Performance Indicators for Measuring ANSP Operational Performance; Technical Report; Civil Air Navigation Services Organisation: Hoofddorp, The Netherlands, 2015. [Google Scholar]
- Ithnan, M.; Selderbeek, T.; van Blokland, W.B.; Lodewijks, G. Aircraft Taxiing Strategy Optimization; Technical Report; Department Maritime & Transport Technology, Delft University of Technology: Delft, The Netherlands, 2015. [Google Scholar]
- Kharina, A.; Rutherford, D. Fuel Efficiency Trends for New Commercial Jet Aircraft: 1960 to 2014; International Council on Clean Transportation: Washington, DC, USA, 2015. [Google Scholar]
- ATRiCS Advanced Traffic Solutions GmbH. Follow the Greens. Available online: http://followthegreens.com/ (accessed on 7 October 2018).
- Rodger, J.A. A fuzzy linguistic ontology payoff method for aerospace real options valuation. Exp. Syst. Appl. 2013, 40, 2828–2840. [Google Scholar] [CrossRef]
- Cormen, T.H.; Lieserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms; The MIT Press: Boston, MA, USA, 2009. [Google Scholar]
- Helbing, D.; Balietti, S. Social Self-Organization; Springer: Berlin, Germany, 2012; pp. 25–70. [Google Scholar]
- Morell, L. Unit Testing and Analysis; Carnegie Mellon University: Pittsburgh, PA, USA, 1989; p. 41. [Google Scholar]
- Carson, J. Model verification and validation. In Proceedings of the Winter Simulation Conference, San Diego, CA, USA, 8–11 December 2002; Volume 1, pp. 52–58. [Google Scholar] [CrossRef]
- ICAO. Manual on Global Performance of the Air Navigation System—Doc 9883; ICAO: Montreal, QC, Canada, 2009. [Google Scholar]
- Khammash, L.; Mantecchini, L.; Reis, V. Micro-simulation of airport taxiing procedures to improve operation sustainability: Application of semi-robotic towing tractor. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017; pp. 616–621. [Google Scholar]
- Humphreys, I.; Francis, G. Performance measurement: A review of airports. Int. J. Transp. Manag. 2002, 1, 79–85. [Google Scholar] [CrossRef]
- Vargha, A.; Delaney, H. A critique and improvement of the CL common language effect size statistics of McGraw and Wong. J. Educ. Behav. Stat. 2000, 25, 101–132. [Google Scholar]
- SESARJU. SESAR Joint Undertaking. Available online: https://www.sesarju.eu/ (accessed on 7 October 2018).
- Straube, K.; Roßbach, M.; Vieten, B.D.; Hahn, K. Follow-the-Greens: The Controllers’ Point of View Results from a SESAR Real Time Simulation with Controllers. Adv. Intell. Syst. Comput. 2016, 484, 837–849. [Google Scholar]
- Zadeh, L.A.; Kacprzyk, J. Fuzzy Logic for the Management of Uncertainty; Wiley: New York, NY, USA, 1992. [Google Scholar]
- Yin, J.; Hu, Y.; Ma, Y.; Xu, Y.; Han, K.; Chen, D. Machine Learning Techniques for Taxi-out Time Prediction with a Macroscopic Network Topology. In Proceedings of the AIAA/IEEE 37th Digital Avionics Systems Conference, London, UK, 23–27 September 2018. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | 01-05-16 | 02-05-16 | 04-05-16 | 07-05-16 | 09-05-16 | 10-05-16 | 12-05-16 | 13-05-16 |
|---|---|---|---|---|---|---|---|---|
| Number of departures | 495 | 414 | 421 | 467 | 510 | 485 | 500 | 512 |
| Number of arrivals | 327 | 508 | 441 | 433 | 337 | 368 | 314 | 320 |
| Total number of flights | 822 | 922 | 862 | 900 | 847 | 853 | 814 | 832 |
| Average taxi time (min) | 8.01 | 7.44 | 7.18 | 7.59 | 7.64 | 6.3 | 7.73 | 8.02 |
| Average taxi distance (km) | 4.00 | 3.93 | 3.85 | 3.94 | 3.72 | 3.01 | 4.00 | 4.01 |
| Parameters | Description | Value |
|---|---|---|
| Maximum taxi speed of the Aircraft Agents | m/s | |
| Turn speed for turns which required to be slowed down | m/s | |
| Acceleration of Aircraft Agents | m/s | |
| Deceleration of Aircraft Agents | m/s | |
| Angle of turn beyond which should be utilized | 30° | |
| Runway occupancy time | 60 s | |
| CBS anticipated conflict detection window | 15 s | |
| MP HWY generation threshold | 2 aircraft | |
| MP HWY time to persist | 300 s | |
| CB HWY generation threshold | 3 commands | |
| CB HWY time to persist | 180 s |
| Planning and | Taxi Time | Taxi Time | Taxi Distance | Taxi Distance |
|---|---|---|---|---|
| Coordination Mechanism | (min/flight) | A-Test Value | (km/flight) | A-Test Value |
| Real-world | - | - | ||
| CBS | 0.40 | 0.49 | ||
| CBS + MP HWYs | 0.41 | 0.50 | ||
| CBS + CB HWYs | 0.40 | 0.50 |
| Planning and Coordination Mechanism | Average (min/event) | Average (km/event) | Average (min/event) | Average (km/event) |
|---|---|---|---|---|
| Real-World | 2.93 | 1.41 | 2.06 | 1.21 |
| CBS | 2.95 | 2.20 | 1.68 | 1.36 |
| CBS + MP HWYs | 2.62 | 2.03 | 1.39 | 1.20 |
| CBS + CB HWYs | 2.55 | 1.98 | 1.59 | 1.27 |
| Planning and | ||||
|---|---|---|---|---|
| Coordination Mechanism | (min/event) | (km/event) | (min/event) | (km/event) |
| Real-World | ||||
| CBS | ||||
| CBS + MP HWYs | ||||
| CBS + CB HWYs |
| Planning and | A-Test Value | A-Test Value | A-Test Value | A-Test Value |
|---|---|---|---|---|
| Coordination Mechanism | of | of | of | of |
| CBS | 0.51 | 0.63 | 0.41 | 0.50 |
| CBS + MP HWYs | 0.50 | 0.63 | 0.38 | 0.49 |
| CBS + CB HWYs | 0.50 | 0.62 | 0.39 | 0.48 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fines, K.; Sharpanskykh, A.; Vert, M. Agent-Based Distributed Planning and Coordination for Resilient Airport Surface Movement Operations. Aerospace 2020, 7, 48. https://doi.org/10.3390/aerospace7040048
Fines K, Sharpanskykh A, Vert M. Agent-Based Distributed Planning and Coordination for Resilient Airport Surface Movement Operations. Aerospace. 2020; 7(4):48. https://doi.org/10.3390/aerospace7040048
Chicago/Turabian StyleFines, Konstantine, Alexei Sharpanskykh, and Matthieu Vert. 2020. "Agent-Based Distributed Planning and Coordination for Resilient Airport Surface Movement Operations" Aerospace 7, no. 4: 48. https://doi.org/10.3390/aerospace7040048
APA StyleFines, K., Sharpanskykh, A., & Vert, M. (2020). Agent-Based Distributed Planning and Coordination for Resilient Airport Surface Movement Operations. Aerospace, 7(4), 48. https://doi.org/10.3390/aerospace7040048