Quasi-3D Aerodynamic Analysis Method for Blended-Wing-Body UAV Configurations



Abstract
:1. Introduction
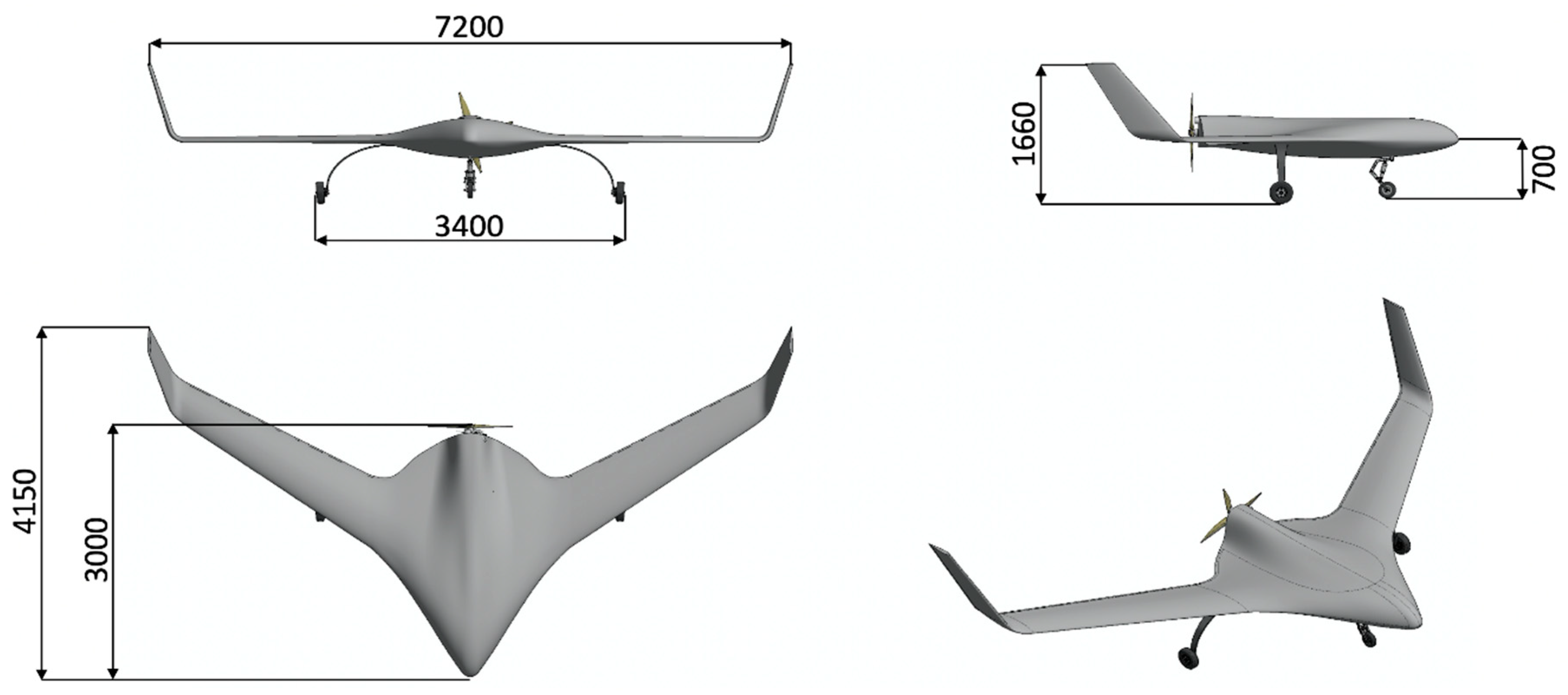
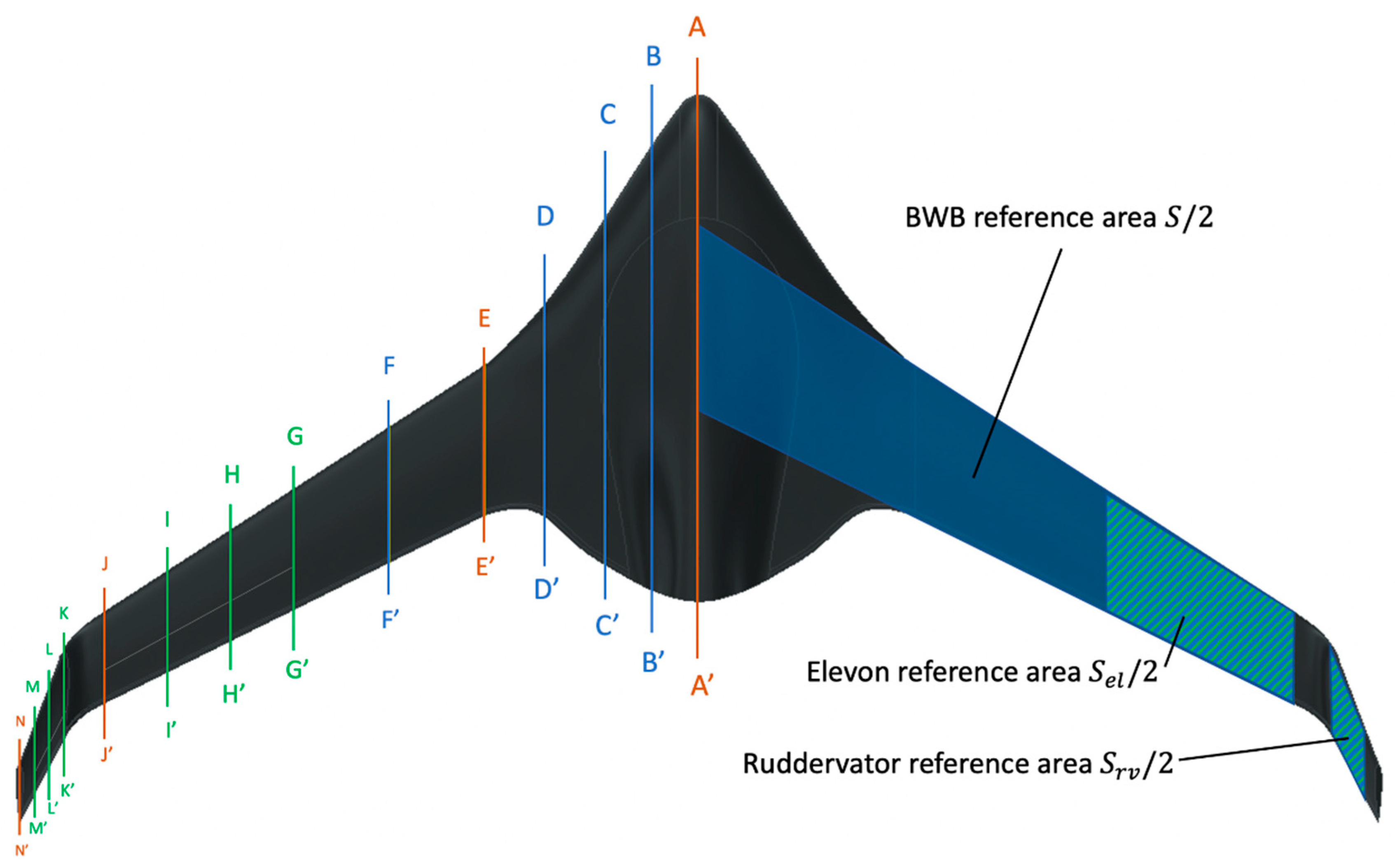
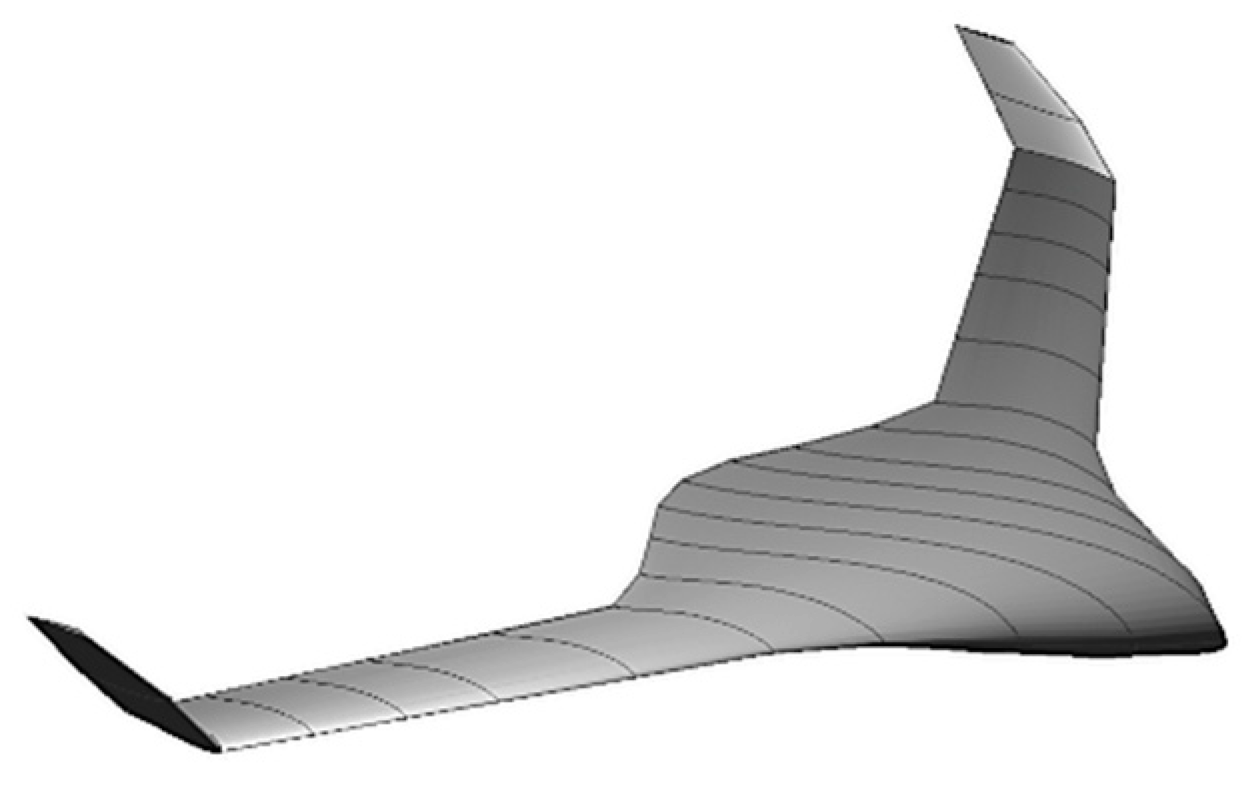
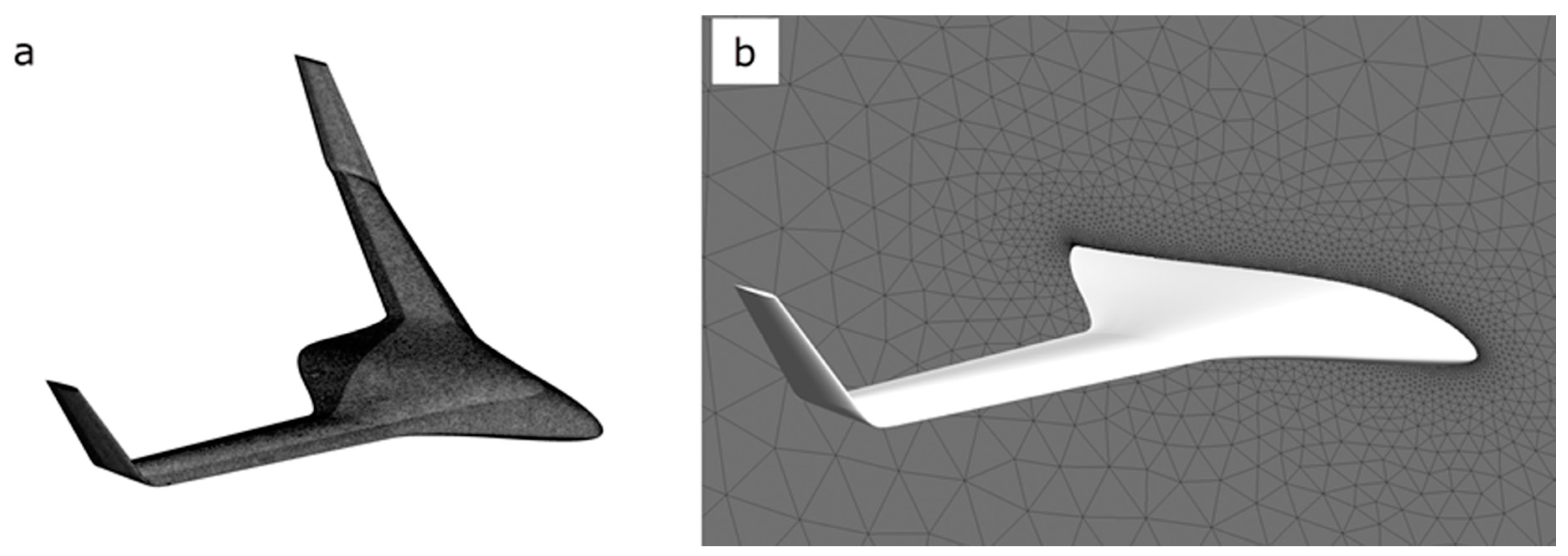
2. Reference Platform
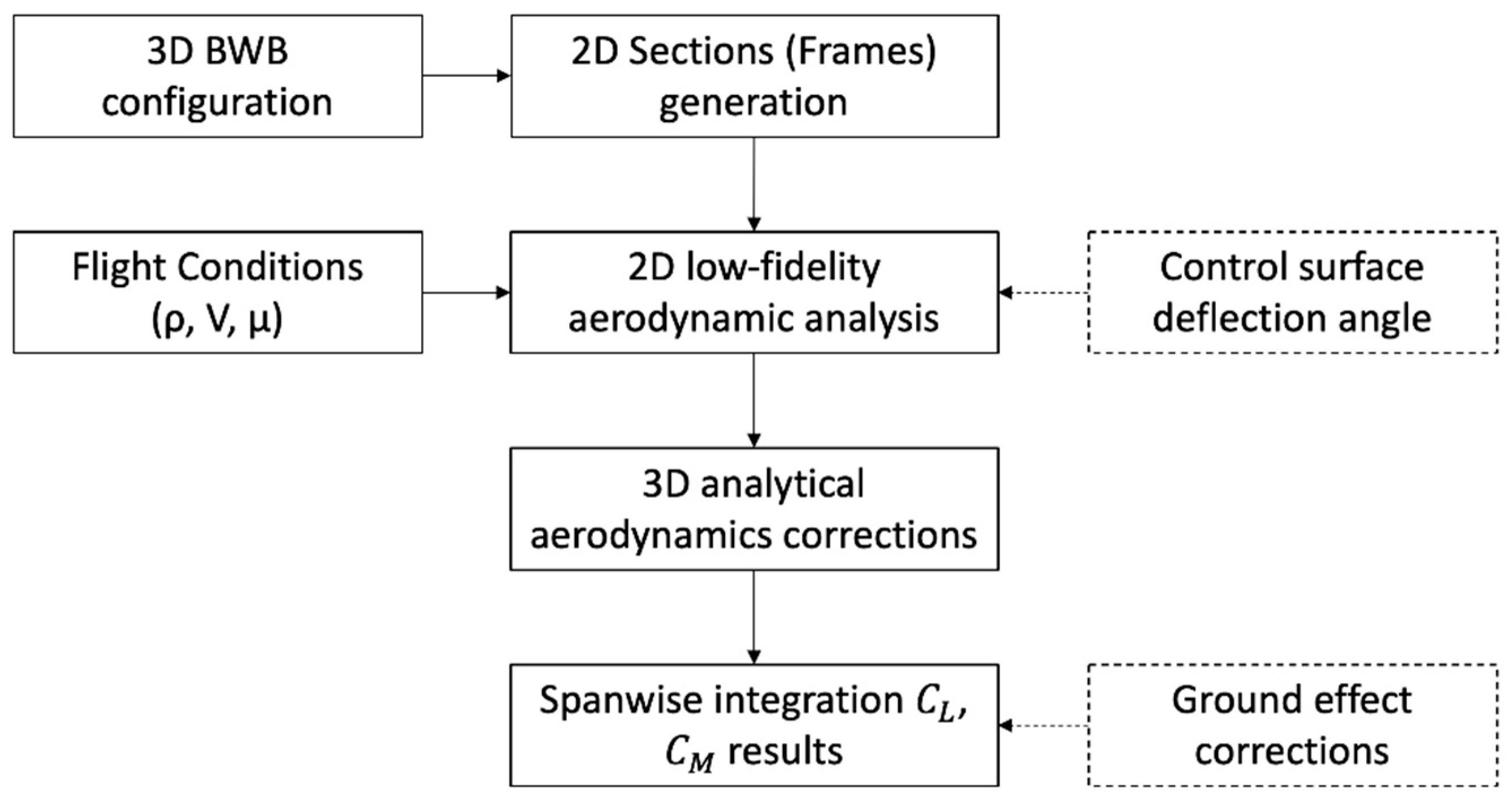
3. Proposed Quasi-3D Method
- Definition of the inputs related to geometric and flight conditions
- 2D rapid solver
- 3D analytical corrections
- Additional corrections related to control surfaces deflection and ground effect
3.1. Geometric and Flight Conditions Inputs
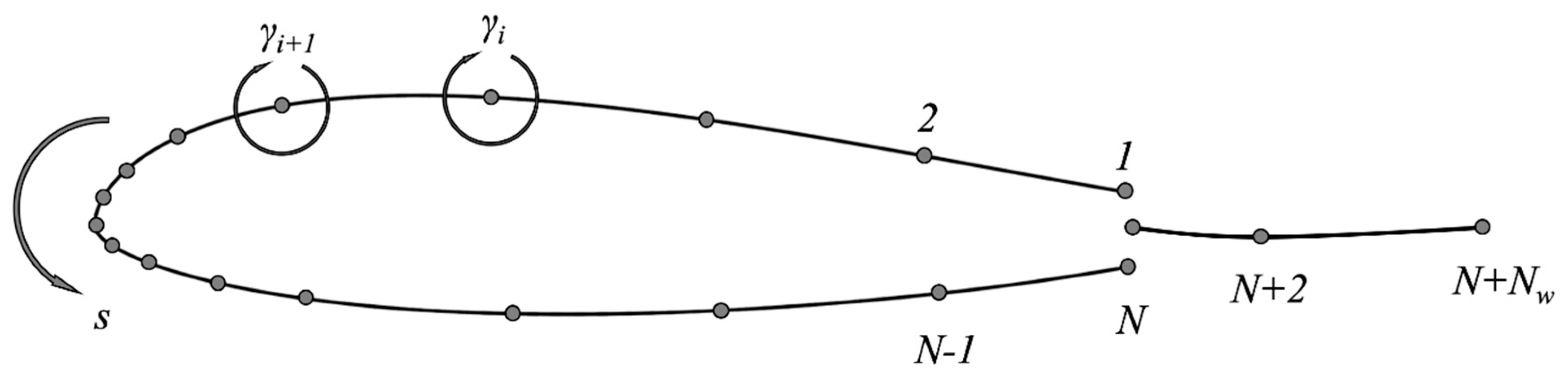
3.2. 2D Low-Fidelity Solver
3.3. 3D Aerodynamic Corrections and Integration (Clean Configuration)
3.4. Additional Corrections
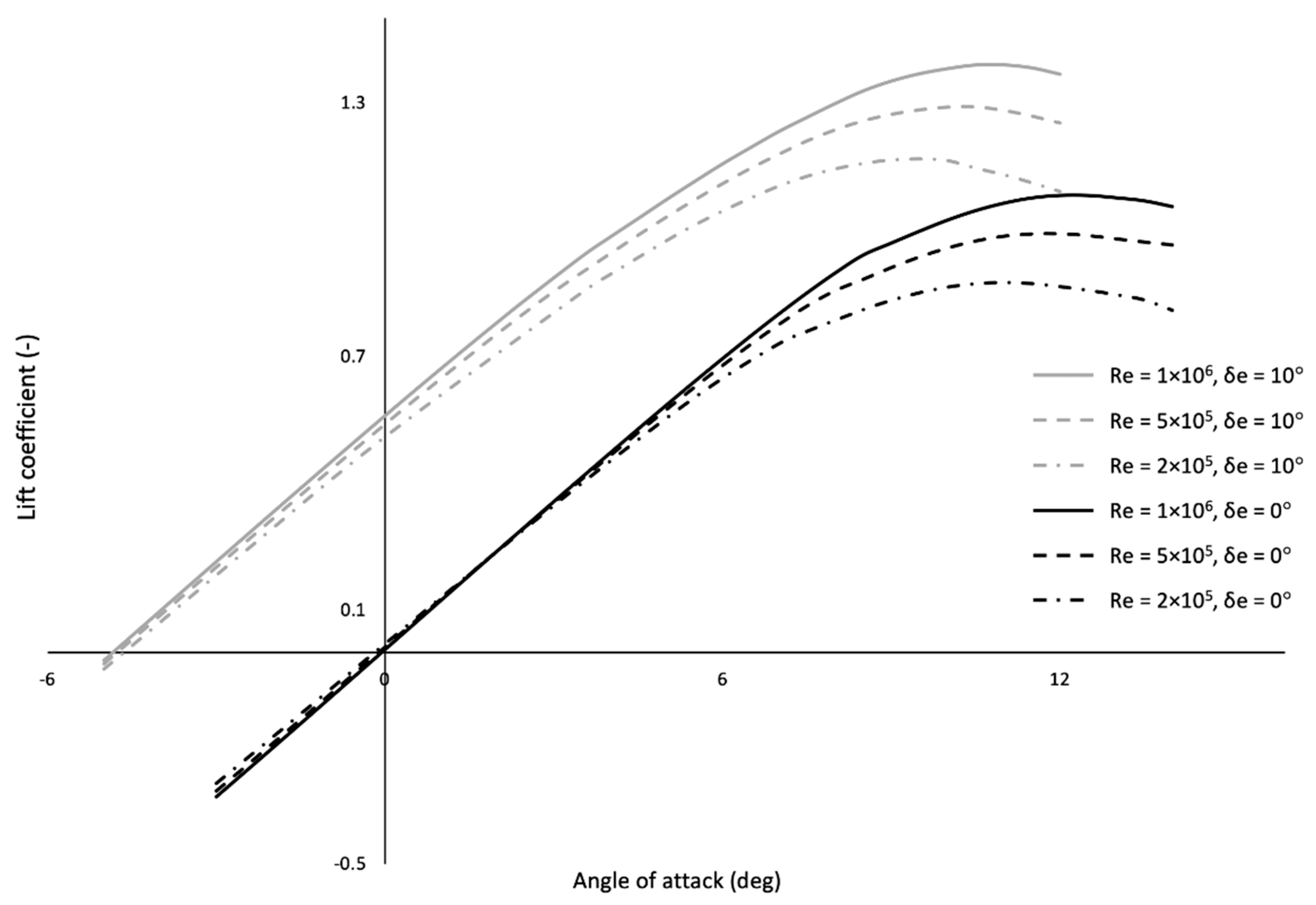
3.4.1. The Effect of the Control Surfaces Deflection
3.4.2. Ground Effect
4. Alternative Aerodynamic and Stability Analysis Methods
4.1. 3D Low-Fidelity Analysis Methodology
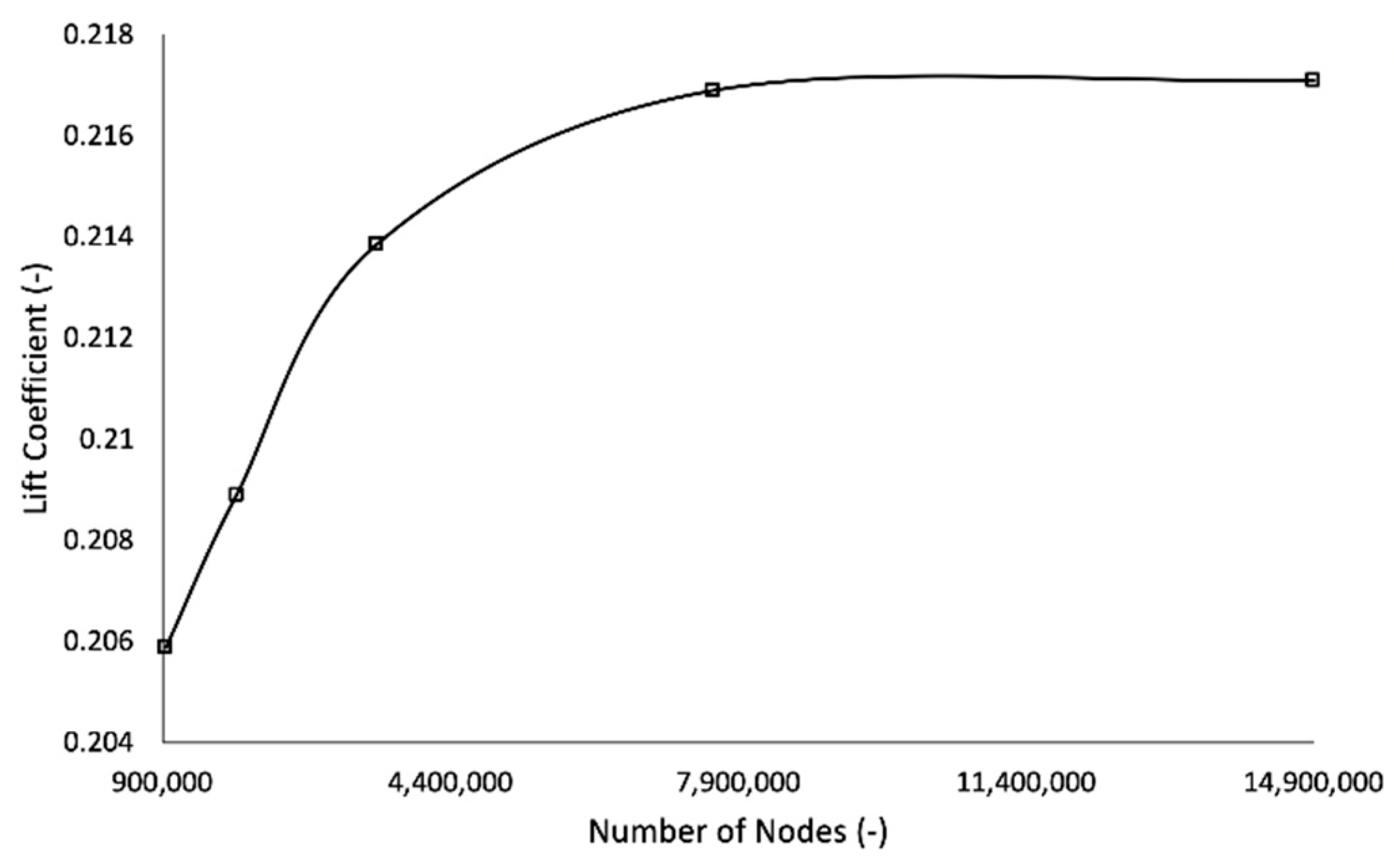
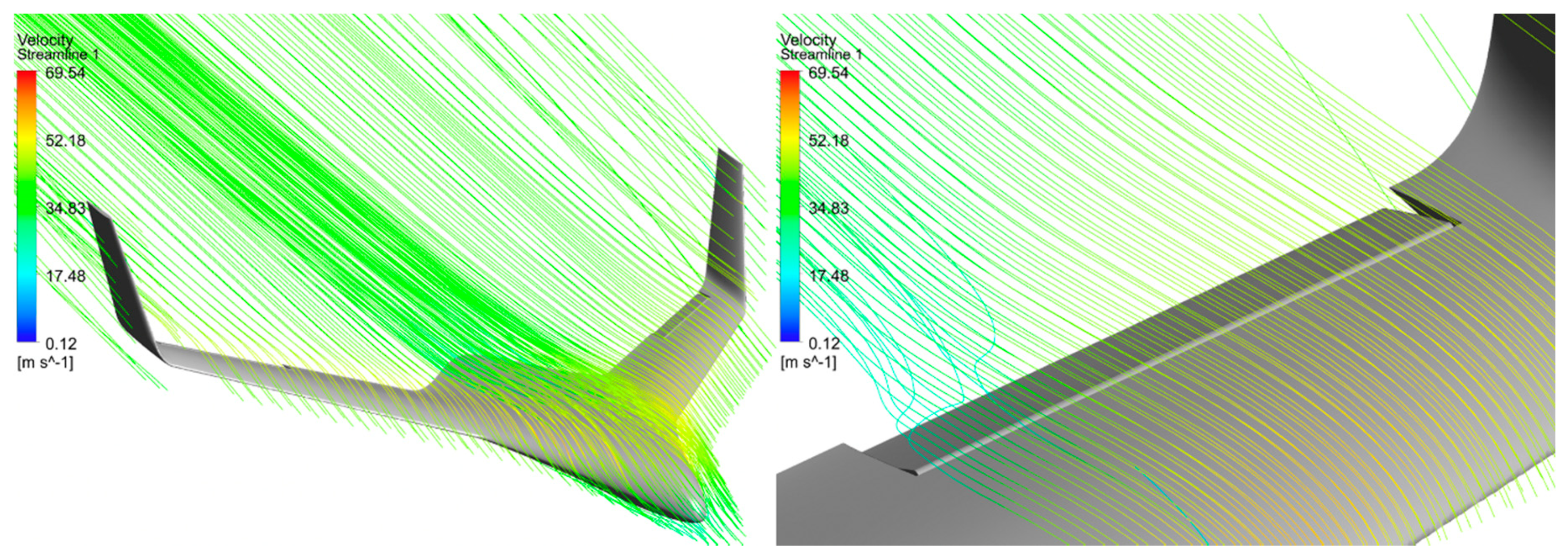
4.2. High-Fidelity Analysis Methodology
5. Results and Discussion
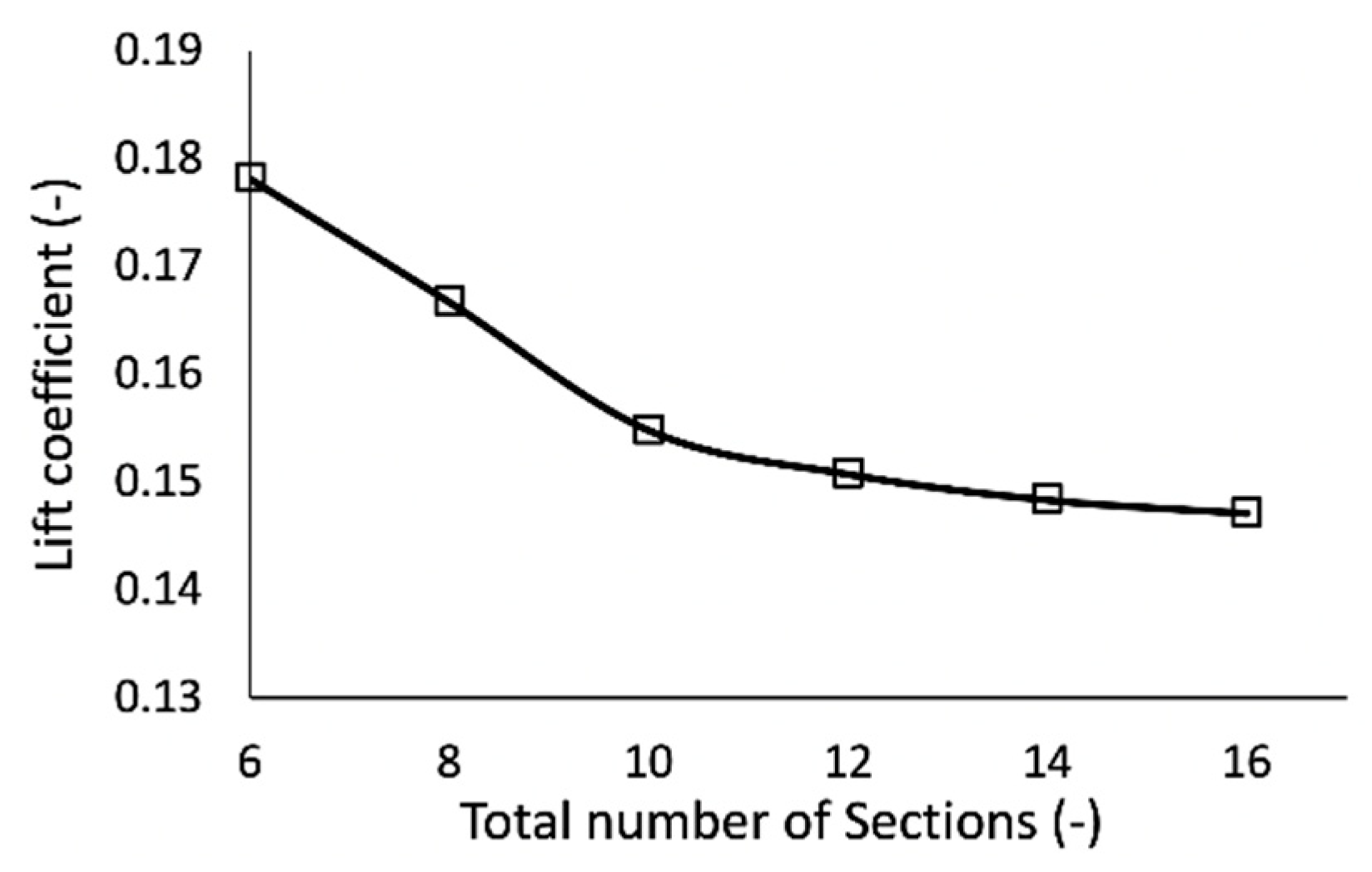
5.1. Proposed Method Validation and Parametric Studies
5.1.1. Clean Configuration
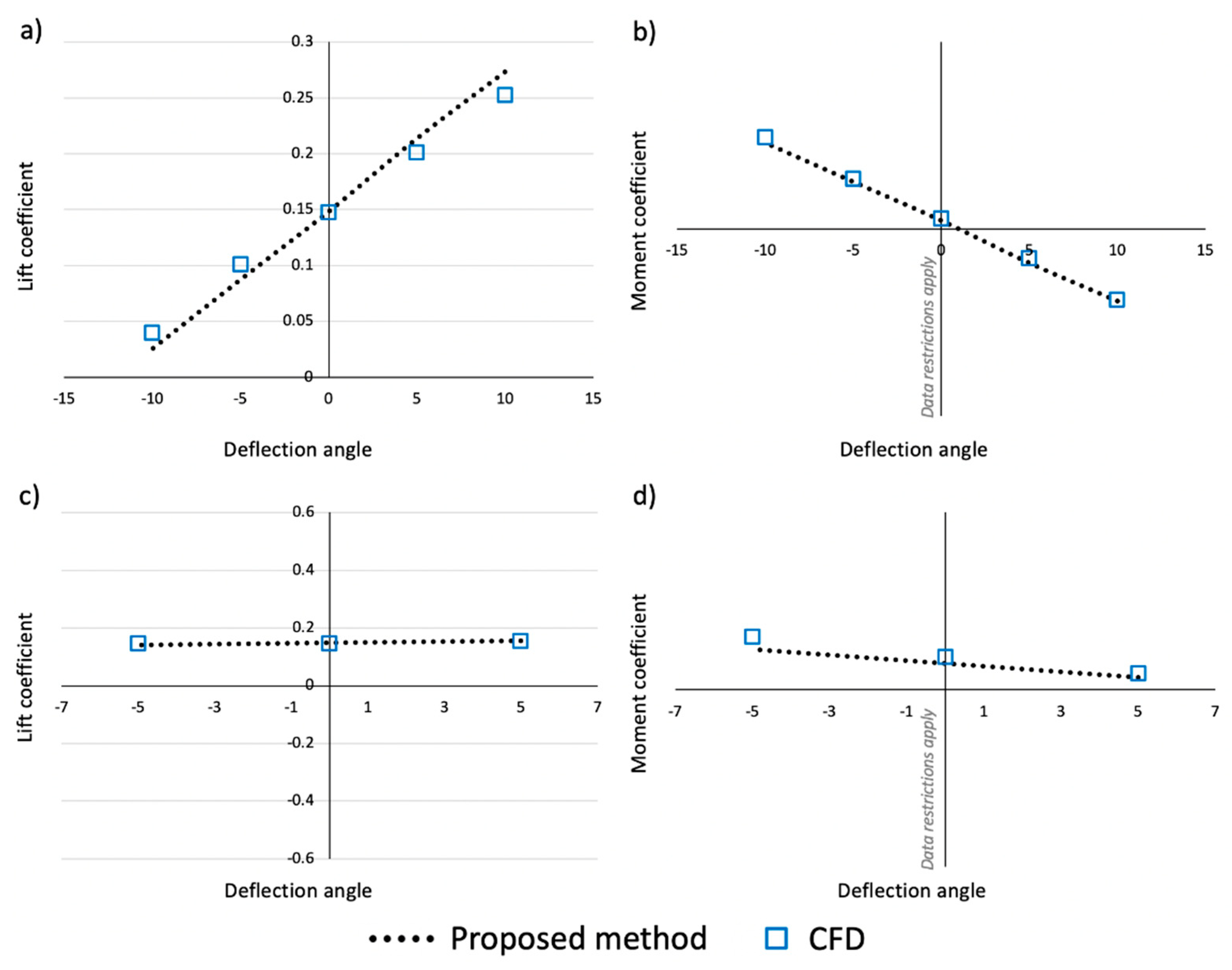
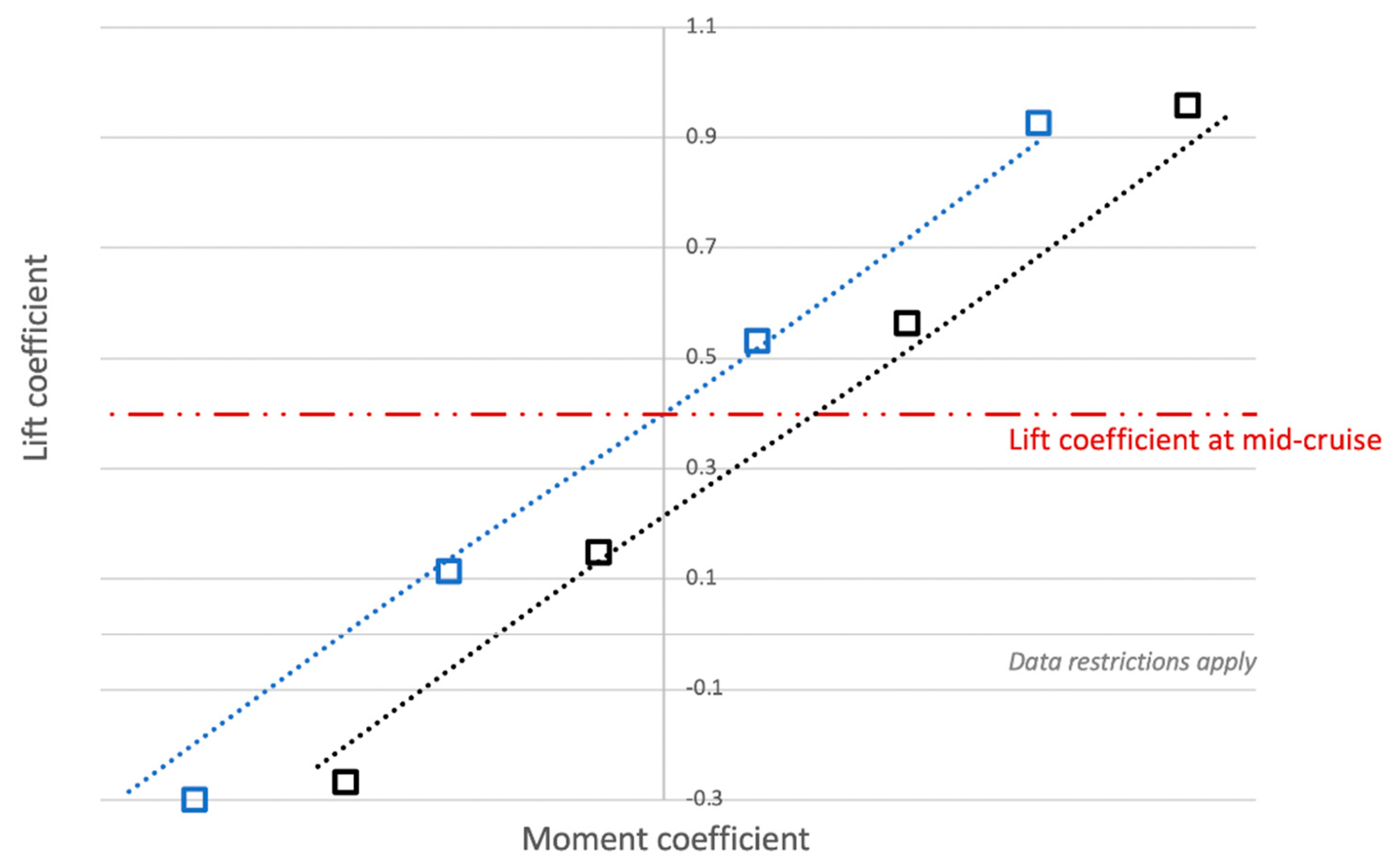
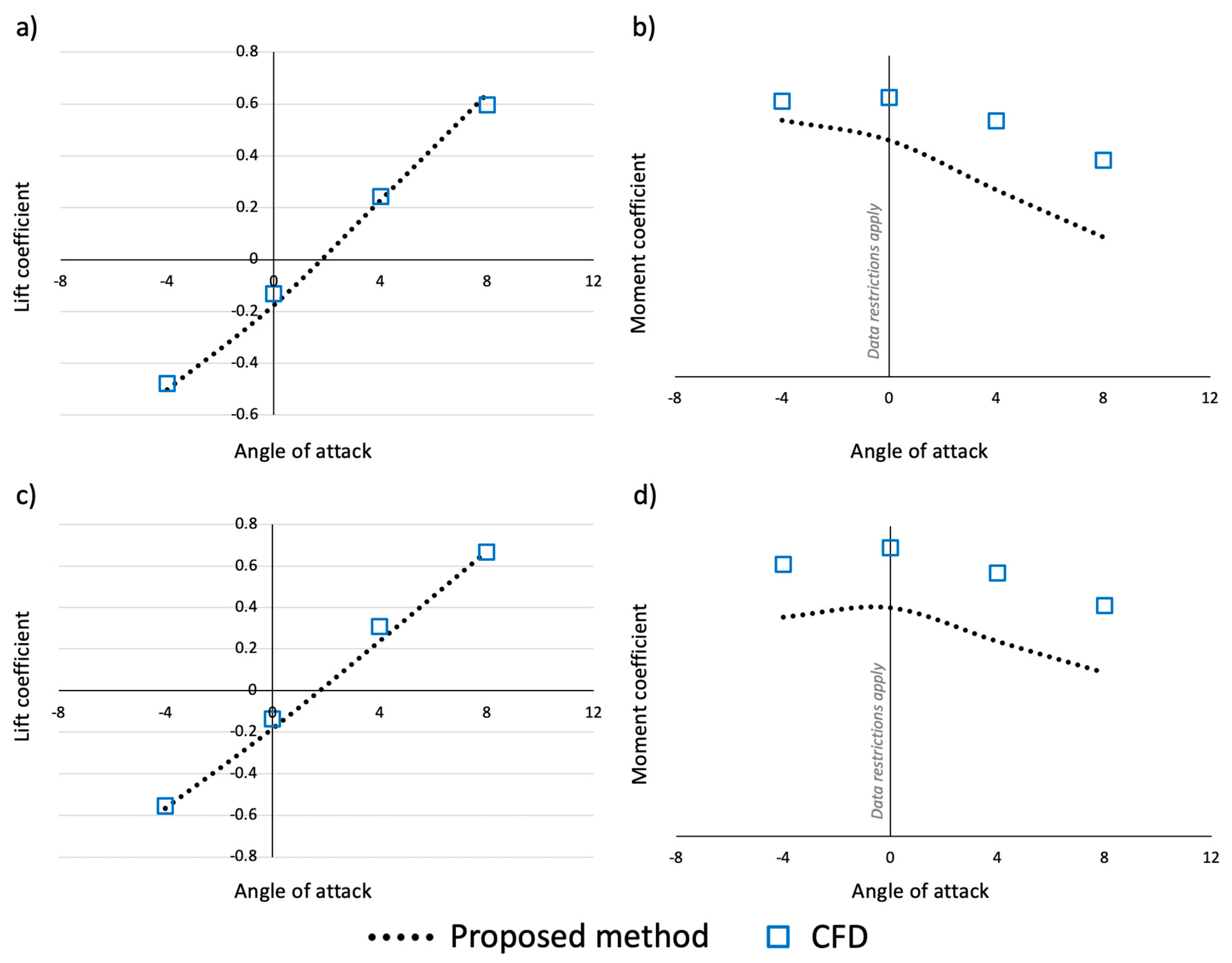
5.1.2. Control Surfaces Deflection and Trim Diagram Calculation
5.1.3. Takeoff Conditions and Ground Effect Impact
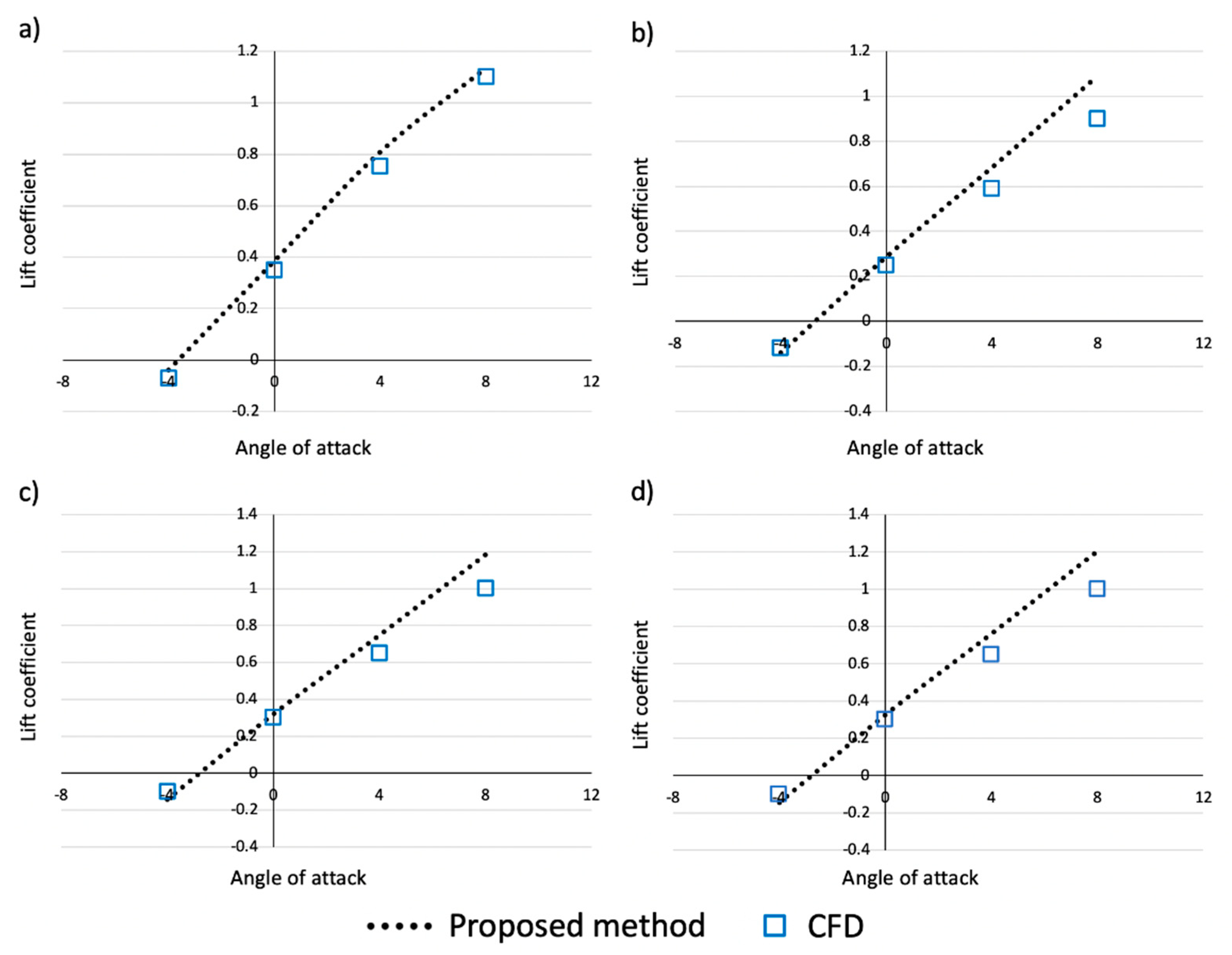
5.1.4. Aspect Ratio and Sweep Angle Parametric Studies
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Heinemann, P.; Panagiotou, P.; Vratny, P.; Kaiser, S.; Hornung, M.; Yakinthos, K. Advanced Tube and Wing Aircraft for Year 2050 Timeframe. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017; p. 1390. [Google Scholar] [CrossRef]
- Jenkinson, L.R.; Simpkin, P.; Rhodes, D. Civil Jet Aircraft Design, 1st ed.; Elsevier: London, UK, 1999; ISBN 9780340741528. [Google Scholar]
- Raymer, D.P. Aircraft Design: A Conceptual Approach, 5th ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2012; ISBN 978-1-60086-911-2. [Google Scholar]
- Advisory Council for Aviation Research and Innovation in Europe. Realising Europe’s Vision for Aviation, Strategic Research & Innovation Agenda. Volume 1. 2017. Available online: https://www.acare4europe.org/sites/acare4europe.org/files/document/ACARE-Strategic-Research-Innovation-Volume-1.pdf (accessed on 11 December 2020).
- Global Unmanned Aerial Vehicle (UAV) Market 2017–2021|Market Research Reports -Industry Analysis Size & Trends—Technavio. (n.d.). Available online: https://www.technavio.com/report/globalaerospace-components-global-uav-market-2017 (accessed on 11 December 2020).
- Panagiotou, P.; Yakinthos, K. Aerodynamic efficiency and performance enhancement of fixed-wing UAVs. Aerosp. Sci. Technol. 2020, 99, 105575–105587. [Google Scholar] [CrossRef]
- Liebeck, R.H. Design of the Blended Wing Body Subsonic Transport. J. Aircraft 2004, 41, 10–25. [Google Scholar] [CrossRef] [Green Version]
- Panagiotou, P.; Mitridis, D.; Dimopoulos, T.; Kapsalis, S.; Dimitriou, S.; Yakinthos, K. Aerodynamic design of a tactical Blended-Wing-Body UAV for the aerial delivery of cargo and lifesaving supplies. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Jansen, R.H.; Bowman, C.; Jankovsky, A.; Dyson, R.; Felder, J.L. Overview of NASA Electrified Aircraft Propulsion Research for Large Subsonic Transports. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017. [Google Scholar] [CrossRef]
- Roskam, J. Airplane Design, Part VI: Preliminary Calculation of Aerodynamic, Thrust and Power Characteristics, 7th ed.; DAR Corporation: Lawrence, KS, USA, 2018; ISBN 978-1-884885-52-5. [Google Scholar]
- Nelson, R.C. Flight Stability and Automatic Control, 1st ed.; McGraw-Hill: New York, NY, USA, 1989; ISBN 978-0-07-046218-2. [Google Scholar]
- Panagiotou, P.; Kaparos, P.; Salpingidou, C.; Yakinthos, K. Aerodynamic design of a MALE UAV. Aerosp. Sci. Technol. 2016, 50, 127–138. [Google Scholar] [CrossRef]
- Drela, M. XFOIL: An Analysis and Design System for Low Reynolds Number Airfoils. In Low Reynolds Number Aerodynamics; Mueller, T.J., Ed.; Springer: Berlin, Germany, 1989. [Google Scholar] [CrossRef]
- Qin, N.; Vavalle, A.; Le Moigne, A.; Laban, M.; Hackett, K.; Weinerfelt, P. Aerodynamic Studies for Blended Wing Body Aircraft. In Proceedings of the 9th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Organization, Atlanta, GA, USA, 4–6 September 2002. [Google Scholar] [CrossRef] [Green Version]
- Nasir, R.E.M.; Kuntjoro, W.; Wisnoe, W.; Ali, Z.; Reduan, N.F.; Mohamad, F.; Suboh, S. Preliminary Design of “Baseline-II” Blended Wing-Body (BWB) Unmanned Aerial Vehicle (UAV): Achieving Higher Aerodynamic Efficiency through Planform Redesign and Low Fidelity Inverse Twist Method. In Proceedings of the EnCon 2010-3rd Engineering Conference on Advancement in Mechanical and Manufacturing for Sustainable Environment, Kuching, Sarawak, Malaysia, 14–16 April 2010. [Google Scholar]
- Morris, A.; Arendse, P.; LaRocca, G.; Laban, M.; Voss, R.; Hönlinger, H. MOB-A European Project on Multidisciplinary Design Optimisation. In Proceedings of the 24th International Congress of the Aeronautical Sciences-ICAS 2004, Yokohama, Japan, 29 August–3 September 2004. [Google Scholar]
- Voskuijl, M.; La Rocca, G.; Dircken, F. Controllability of Blended Wing Body aircraft. In Proceedings of the 26th ICAS Congress, Anchorage, AK, USA, 14–19 September 2008. [Google Scholar]
- Li, P.; Zhang, B.; Chen, Y.; Yuan, C.; Lin, Y. Aerodynamic Design Methodology for Blended Wing Body Transport. Chin. J. Aeronaut. 2012, 25, 508–516. [Google Scholar] [CrossRef] [Green Version]
- Hileman, J.I.; Spakovszky, Z.S.; Drela, M.; Sargeant, M.A. Aerodynamic and aeroacoustic three-dimensional design for a “silent” aircraft. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006. [Google Scholar] [CrossRef] [Green Version]
- Hileman, J.I.; Spakovszky, Z.S.; Drela, M.; Sargeant, M.A. Airframe design for “silent” aircraft. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2007. [Google Scholar] [CrossRef] [Green Version]
- Hileman, J.I.; Spakovszky, Z.S.; Drela, M.; Sargeant, M.A.; Jones, A. Airframe design for silent fuel-efficient aircraft. J. Aircraft 2010, 47, 956–969. [Google Scholar] [CrossRef] [Green Version]
- Kontogiannis, S.G.; Ekaterinaris, J.A. Design, Performance Evaluation and Optimization of a UAV. Aerosp. Sci. Technol. 2013, 29, 339–350. [Google Scholar] [CrossRef]
- Götten, F.; Havermann, M.; Braun, C.; Marino, M.; Bil, C. Wind-tunnel and CFD investigations of UAV landing gears and turrets—Improvements in empirical drag estimation. Aerosp. Sci. Technol. 2020, 107, 106306. [Google Scholar] [CrossRef]
- Hoerner, S.F. Fluid-Dynamic Drag: Practical Information on Aerodynamic Drag and Hydrodynamic Resistance; Hoerner Fluid Dynamics: Brick Town, NJ, USA, 1965; ISBN 978-9991194448. [Google Scholar]
- Panagiotou, P.; Fotiadis-Karras, S.; Yakinthos, K. Conceptual Design of a Blended Wing Body MALE UAV. Aerosp. Sci. Technol. 2018, 73, 32–47. [Google Scholar] [CrossRef]
- Panagiotou, P.; Yakinthos, K. Parametric aerodynamic study of Blended-Wing-Body platforms at low subsonic speeds for UAV applications. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- ATP–3.3.7—NATO STANAG 4670 (Edition 3) Guidance for the Training of Unmanned Aircraft Systems (UAS) Operators. NATO Standardization Agency. 2014. Available online: https://nso.nato.int/nso/nsdd/listpromulg.html (accessed on 11 December 2020).
- Gómez-Rodríguez, Á.; Sanchez-Carmona, A.; García-Hernández, L.; Cuerno-Rejado, C. Preliminary Correlations for Remotely Piloted Aircraft Systems Sizing. Aerospace 2018, 5, 5. [Google Scholar] [CrossRef] [Green Version]
- Verstraete, D.; Palmer, J.L.; Hornung, M. Preliminary Sizing Correlations for Fixed-Wing Unmanned Aerial Vehicle Characteristics. J. Aircraft 2018, 55, 715–726. [Google Scholar] [CrossRef]
- Deperrois, A. XFLR5: Analysis of Foils and Wings Operating at Low Reynolds Number. Available online: https://engineering.purdue.edu/~aerodyn/AAE333/FALL10/HOMEWORKS/HW13/XFLR5_v6.01_Beta_Win32%282%29/Release/Guidelines.pdf (accessed on 11 December 2020).
- Anderson, J.D. Fundamentals of Aerodynamics, 5th ed.; McGraw-Hill: New York, NY, USA, 2011; ISBN 978-0-07-339810-5. [Google Scholar]
- Asselin, M. An Introduction to Aircraft Performance, 1st ed.; AIAA Education Series; AIAA Education: Reston, VA, USA, 1997; ISBN 9781563472213. [Google Scholar]
- Roskam, J. Airplane Design, Part IV: Layout Design of Landing Gear & Systems, 7th ed.; DAR Corporation: Lawrence, KS, USA, 2017; ISBN 9781884885532. [Google Scholar]
- Maskew, B. Program VSAERO Theory Document: A Computer Program for Calculating Nonlinear Aerodynamic Characteristics of Arbitrary Configurations. NASA Contractor Report 4023. 1987. Available online: https://ntrs.nasa.gov/citations/19900004884 (accessed on 11 December 2020).
- Spalart, P.R.; Allmaras, S.R. A one-equation turbulence model for aerodynamic flows. In Proceedings of the 30th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 1992; pp. 5–21. [Google Scholar] [CrossRef]
- ANSYS, Inc. ANSYS CFX 2020 R2 Documentation. Available online: https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/prod_page.html?pn=CFX&pid=CFX&lang=en (accessed on 11 December 2020).
- ANSA. BETA CAE Systems, ANSA 21.0.1, ANSA Software Manual; ANSA: Rome, Italy, 2020. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Guo, Z.; Deng, X.; Hou, Z. Aerodynamic Performance and Transition Prediction of Low-Speed Fixed-Wing Unmanned Aerial Vehicles in Full Configuration Based on Improved γ—Re Model. Aerosp. Sci. Technol. 2020, 107, 106281:1–106281:15. [Google Scholar] [CrossRef]
- Vicroy, D.D.; Gatlin, G.M.; Jenkins, L.N.; Murphy, P.C.; Carter, M.B. Low-speed Aerodynamic Investigations of a Hybrid Wing Body Configuration. In Proceedings of the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar] [CrossRef] [Green Version]
- Kitsios, I.; Dimopoulos, T.; Panagiotou, P.; Yakinthos, K. Longitudinal Dynamics Analysis and Autopilot Design for a Fixed-Wing, Tactical Blended-Wing-Body UAV. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 149–157. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MTOW | 200–600 | (kg) |
| Cruise speed | 160 | (km/h) |
| Takeoff speed | 108 | (km/h) |
| Service ceiling | 15,000–20,000 | (ft) |
| Payload capacity | Depends on the scenario | |
| - Scenario 1 | 100 | (kg) |
| - Scenario 2 | 50 | (kg) |
| Endurance | Depends on the scenario | |
| - Scenario 1 | <10 | (h) |
| - Scenario 2 | >10 | (h) |
| Flight Segment | Angles of Attack (deg) | Freestream Velocities (m/s) | Elevon Deflections (deg) | Ruddervator Deflections (deg) | Altitude (m) |
|---|---|---|---|---|---|
| Cruise | −4, 0, 4, 8, 12 | 50 | 0 | 0 | 2000 |
| Cruise | 0 | 50 | −10, −5, 5, 10 | 0 | 2000 |
| Cruise | 0 | 50 | 0 | −5, 5 | 2000 |
| Takeoff | −4, 0, 4, 8 | 30 | −35 | −35 | 0 |
| AOA | CFD | XFLR5 3D | Proposed Method | XFLR5 3D vs. CFD | Proposed Method vs. CFD |
|---|---|---|---|---|---|
| −4 | −0.2669 | −0.1659 | −0.2392 | 37.8% | 10.4% |
| 0 | 0.1476 | 0.0920 | 0.1483 | 37.7% | 0.5% |
| 4 | 0.5647 | 0.3489 | 0.5462 | 38.2% | 3.3% |
| 8 | 0.9583 | 0.6022 | 0.9376 | 37.2% | 2.2% |
| 12 | 1.2259 | 0.8497 | 1.2425 | 30.7% | 1.4% |
| AOA | CFD | XFLR5 3D | Proposed Method | XFLR5 3D vs. CFD | Proposed Method vs. CFD |
|---|---|---|---|---|---|
| −4 | 65.0% | 8.7% | |||
| 0 | Data restrictions apply | 59.1% | 19.3% | ||
| 4 | 137.7% | 10.6% | |||
| 8 | 114.8% | 7.3% | |||
| 12 | 113.5% | 88.7% | |||
| Configuration | Sweep Angle (Degrees) | AR |
|---|---|---|
| (a) | 0 | 24 |
| (b) | 40 | 8 |
| (c) | 20 | 8 |
| (d) | −10 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Panagiotou, P.; Dimopoulos, T.; Dimitriou, S.; Yakinthos, K. Quasi-3D Aerodynamic Analysis Method for Blended-Wing-Body UAV Configurations. Aerospace 2021, 8, 13. https://doi.org/10.3390/aerospace8010013
Panagiotou P, Dimopoulos T, Dimitriou S, Yakinthos K. Quasi-3D Aerodynamic Analysis Method for Blended-Wing-Body UAV Configurations. Aerospace. 2021; 8(1):13. https://doi.org/10.3390/aerospace8010013
Chicago/Turabian StylePanagiotou, Pericles, Thomas Dimopoulos, Stylianos Dimitriou, and Kyros Yakinthos. 2021. "Quasi-3D Aerodynamic Analysis Method for Blended-Wing-Body UAV Configurations" Aerospace 8, no. 1: 13. https://doi.org/10.3390/aerospace8010013
APA StylePanagiotou, P., Dimopoulos, T., Dimitriou, S., & Yakinthos, K. (2021). Quasi-3D Aerodynamic Analysis Method for Blended-Wing-Body UAV Configurations. Aerospace, 8(1), 13. https://doi.org/10.3390/aerospace8010013