This paper aims at a thorough study on the consequences on runway safety and capacity when implementing a bird strike advisory system for airport air traffic control. To validate the concept with representative results, Monte Carlo simulations involving different air traffic intensities, flight plan patterns as well as variation in bird abundance were performed. This section first introduces the logic of the collision avoidance algorithm underlying the bird strike advisory system. Subsequently, the configuration of the Monte Carlo simulations and the applied specifications are described.
2.1. Collision Avoidance Algorithm
The presented collision avoidance algorithm is conceptually comparable to the Airborne Collision Avoidance System (ACAS) which aims at the prevention of mid-air collisions between aircraft [
7]. Based on an information received from the Secondary Surveillance Radar (SSR) transponders of the aircraft, the time to and minimum distance at the Closest Point of Approach (CPA) between the two trajectories are predicted. The time to CPA and fixed altitude thresholds shape the protected volume of aircraft. They are divided into a caution, a warning and a collision area. If the caution area is intruded by another aircraft, a traffic advisory is issued to both aircraft. In case of a penetration of the warning area, resolution advisories to eliminate the conflict are provided [
7].
When considering collision avoidance between birds and aircraft, this logic can be applied as well. However, due to the differences in size, velocity and number of opponents in aircraft-bird collision avoidance, some adaptations have to be considered for the implementation of a respective algorithm.
First, the requirement for the number of potential opponents to process is limited in ACAS. Implementations have to be able to process up to 24 aircraft in a 10-kilometer radius [
7]. In contrast, thousands of birds and thus potential opponents can be airborne in an airport’s departure corridor [
8]. Hence, strong filtering for critical opponents has to be performed to comply with run-time- and memory-limitations.
Second, the required protected volumes around the opponents are much smaller in bird strike prevention than in aircraft-aircraft collision avoidance. In ACAS, the horizontal size of protected volumes can extend to 26 kilometres to account for the high approaching speeds of opponents [
7]. In contrast, tens of metres are required in collision avoidance between aircraft and birds. Consequently, high precision of the predicted trajectories is required to enable correct collision identification.
ACAS relies on an information exchange between on-board transponders. For area-covering and real-time movement information of birds in the extended airport environment, ground-based sensors such as radar, visual or infrared video have to be used. Hence, the spatial extension as well as the look ahead time are limited by the range of the chosen sensor. Since the intentions of birds are unknown, an estimate of their future flight path has to be made. Thereby, their potential reactions to aircraft have to be taken into account [
9]. Since the kinetic energy of the impact of a collision with a bird increases with increasing involved biomass, especially large individuals and flocks of birds are threatening. For prioritization, the chosen sensors acquiring bird movement information should be able to classify birds in weight categories.
Considering these factors, a collision avoidance algorithm for operational bird strike prevention was developed [
6]. It builds on the aircraft-aircraft collision avoidance algorithm of Kuenz (2015, [
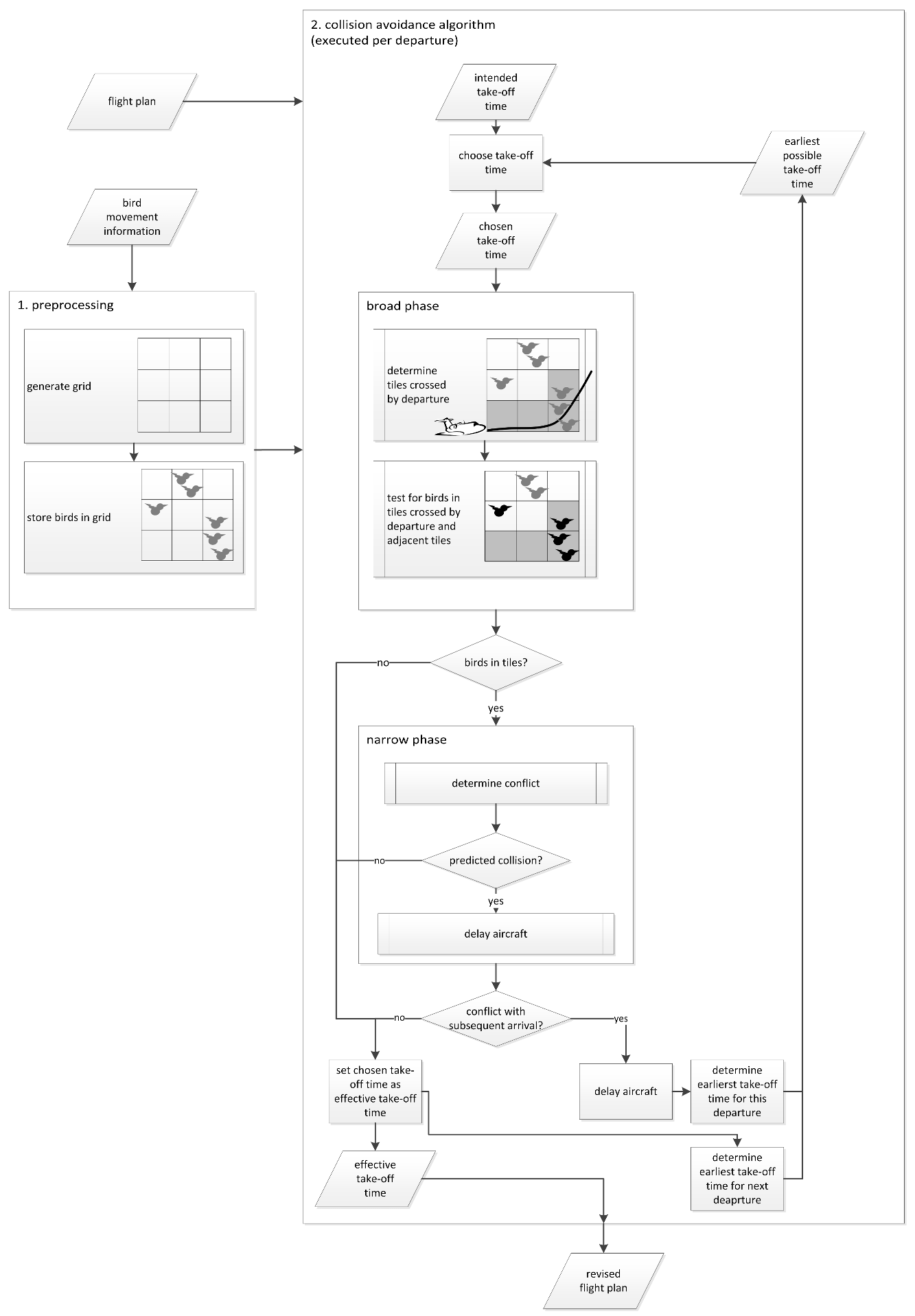
10]). This algorithm aims at large-scale scenarios, resolving aircraft-aircraft conflicts on a global level. Hence, it is optimized to compare large numbers of opponents, as required for the implementation targeting the prevention of collisions between aircraft and birds. The optimization is achieved by dividing the collision detection into two phases. In the first, the broad phase, the airspace is filtered for aircraft that are likely to conflict with the own ship. For this purpose, the airspace is split into a grid consisting of
n-dimensional tiles. Only if the trajectories of the other aircraft and the own aircraft cross identical or neighbouring tiles, the other aircraft is considered as potential opponent. In the second, the narrow phase, a high-precision trajectory comparison is performed for the effective collision detection on the filtered opponents only.
For the here presented adaptation of the collision avoidance algorithm for the prevention of bird strikes, the airspace is discretized in the four dimensions time, latitude, longitude and altitude.
Figure 1 displays the subsequently described steps performed. The algorithm is provided with flight plans as well as bird movement information of entire days. Based on their positions obtained from tracking sensors, birds are stored in the tiles of the grid in the preprocessing step. Every scheduled departure is tested against the birds present at the intended take-off time. For this purpose, the tiles which will be crossed by the aircraft, are determined based on its predicted trajectory in the broad phase. Only birds stored in these or in their neighbouring tiles will be considered for collision-detection in the narrow phase. The latter are included to account for aircraft and birds flying close to the boundaries of their tiles (cf. [
10]). To identify collisions, the predicted trajectories of the respective birds and the aircraft are compared. If the comparison reveals that they will penetrate the protected zone of each other, the aircraft receives a take-off delay to avoid the collision. Thereby, separation minima to subsequent aircraft are considered. To avoid go-arounds for arrivals, they are given priority. If the delay of a departure leads to a loss of separation with the subsequent arrival, the departing aircraft is scheduled to depart behind the arrival. This can result in domino-effects for following departures. The output of the algorithm is a rescheduled flight plan for the considered traffic day.
Figure 1 shows the steps performed within the algorithm.
2.2. Specifications
Air traffic flight plans of a single runway airport and information about bird movement to be used as input for the collision avoidance algorithm were generated as described below.
Flight plans for single runway operations were generated for an airport with high traffic intensity, containing 900 flights per day, as well as one with medium traffic intensity, containing 500 flights per traffic day. These intensities have proven to be most critical considering the algorithm’s runway impact [
6]. To obtain various scenarios for the Monte Carlo simulations, flight plans with various traffic shares and schedules were generated with the tool Computing Runway Capacity Enhancements [
11]. The main focus of this tool lies on runway capacity analysis. For this study, its module to randomize flight plans for a defined number of aircraft was used. To randomize flight plans, the sequence of departures and arrivals is defined in a first step. Subsequently, separations between the aircraft are calculated based on various parameters such as minimum separation, aircraft and airport characteristics as well as human factors. An overview of all parameters and applied distributions can be found in [
12]. For this study, the flights were spread over a period of 18 h with a minimum separation of 66 s between aircraft. To generate sequences meeting these requirements, specific distributions for the parameters separation buffer in aircraft separation as well as a reaction time of controller or pilots were applied. These can be found in
Table 1. Departing aircraft were randomly assigned to one of four Standard Instrument Departure Routes. Following this procedure, 1000 scenarios for each of the departure shares 25%, 50%, 75% and 100%, were generated, leading to 4000 scenarios for the high and medium traffic intensities, respectively.
Bird movement is represented in Bird Movement Plans (BMPs). To include bird movement up to 1000 m, where the risk of bird strikes is highest [
3], two sources were used. From ground to 200 m, bird tracks were obtained from an horizontal X-band avian radar, located at Eindhoven airport (NL). In the vertical range from 200 m to 1000 m, which lies beyond the range of the avian radar, bird densities were obtained from the C-band Doppler weather radar in De Bilt (NL) and transformed to individual bird tracks. The radar specifications and the procedure to generate bird tracks suitable as input for the simulation are described in an earlier study [
14]. By following the procedure developed in that research, three BMPs represent bird tracks of small, medium and large birds as well as flocking birds were created. The number of simulated bird strikes has been shown to be overestimated by a factor of three in a previous study [
15]. This was mainly attributed to exclusion of bird reactions to aircraft as observed in reality [
9]. In addition, the airport of Eindhoven where the data originates from has low air traffic activity. Hence, more bird activity on the runway takes place than it would be observed on busy airports [
16]. Consequently, the influence of the algorithm will be larger than it would be for realistic bird strike numbers.
Combining the three BMPs with the 8000 flight plans from the two air traffic intensities leads to 24,000 scenarios for the Monte Carlo simulations.
The collision avoidance algorithm itself was configured as described below. Since the goal of this study is to evaluate the algorithm under ideal conditions, aircraft and bird trajectories were considered as perfectly predictable. Aircraft trajectories were stored based on simulation logs from the simulation environment BlueSky Open Air Traffic Simulator. This tool was also used for the Monte Carlo simulations of the initial and revised flight plans. BlueSky has been developed at Delft University of Technology to analyze air traffic flows and air traffic management concepts [
17]. It was enhanced to represent bird movements and detect collisions between birds and aircraft, as previously described. [
14]. Both versions are available on GitHub [
18,
19].
Aircraft performance within the simulation was represented by the Base of Aircraft Data (BADA) 3.12 implementation. All aircraft were simulated as Airbus A320-200 aircraft. A logging frequency of 20 Hz for the lift-off phase between 0 and 15 m and a frequency of 2 Hz for the remaining flight phases was used for the trajectory representation within the algorithm. The increased frequency during lift-off was used to account for strong changes in vertical velocity in that phase. This combination has proven to be a good trade-off between sufficient precision and minimum memory cost [
6]. Birds were stored in the grid based on all positions provided in the BMP. Thereby, birds of all weight categories were included to study the effects of an algorithm preventing all potential strikes. The dimensions of the grid tiles amount to 1000 m in latitude and longitude and 100 m in altitude. In the narrow phase of the algorithm, linear interpolation between recorded bird and aircraft positions was applied. There, the trajectories were tested with a sampling rate of 20 Hz. Consequently, conflicts lasting at least 50 ms were detected. Conflicts lasting less could go undetected due to the selected sampling rate. The algorithm considered the tracks of all birds airborne at the intended take-off time. Birds that got airborne after the aircraft started rolling were not visible to the algorithm. Therefore, collisions caused by such birds could not be prevented.
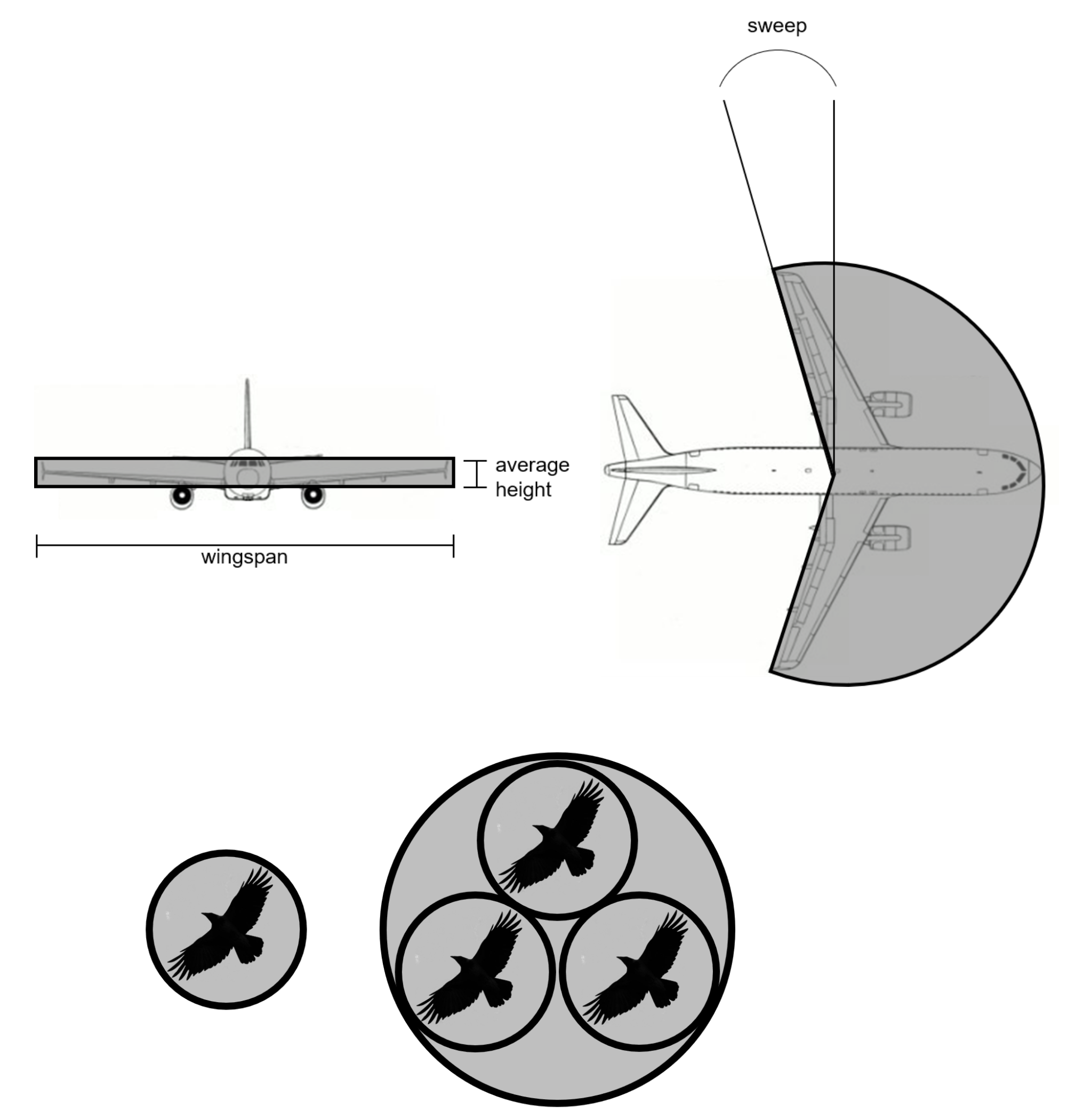
The protected volumes were defined as geometrical shapes around aircraft and birds. Due to the small look-ahead times, the protected volumes only consisted of a collision area, leaving out the caution and warning areas as implemented in ACAS. A penetration detected within the narrow phase of the algorithm triggered a take-off delay for the involved departing aircraft. The imposed delay lasted at least five seconds and maximum as long as the bird needed to leave the critical area. Due to their small size, birds have a two-dimensional disc-shaped protected volume and thus, strictly speaking, a protected plane, with no height. Its size depends on the bird’s weight category. The protected panes of flocks were designed as circle, containing the circles of the individual flock members, following the theory of Graham [
20]. A detailed description of the modelling method has been described in earlier research [
14].
Aircraft are surrounded by a three-dimensional disc, leaving out the rear part of the aircraft, as it barely got hit by birds in reality [
2,
21]. The resulting shape was similar to a reverse-facing pac-man with the opening angle defined by the wing’s trailing edge sweep. The size of the protected volume depends on the aircraft’s size category. For the Airbus A320-200, which was used as model in this study, the radius amounts to 19.94 m, the height to 1.01 m and the sweep to 25.00
. In
Figure 2, the protected volumes of birds and aircraft are presented.
When verifying the algorithm with these settings for a limited sample of scenarios [
6], it was found that 97% of actual collisions were prevented by the algorithm. For 2% of all strikes, false alerts, i.e., unnecessary warnings, were generated. As missed strikes, they can result from offsets between the effective flight paths and the interpolation taking place in the algorithm due to the chosen sampling rates. By increasing the sampling rates, the accuracy could be improved. However, this would impair run time efficiency. To find a balance between precision and efficiency, different sampling rates were tested in the initial study [
6]. There, the algorithm was defined to be sufficiently accurate if it prevented at least 95% of all strikes and generated a maximum of 5% of false alerts. These requirements apply for the here presented study as well.
If the number of airspace users was forecasted to exceed the capacity at airports or en-route, Air Traffic Flow Management (ATFM) slots could be assigned to departing aircraft. The so-called slot tolerance window started five minutes prior and ended 10 min after the assigned departure time [
22]. To be able to comply with potential ATFM slots, the maximum tolerable delay due to bird strike prevention amounted to 10 min. The number of delays exceeding 10 min as well as their duration were counted as a performance indicator. Shifts of flights to beyond the opening hours indicated that the airport could not keep up its capacity. Therefore, all aircraft should be able to depart within the assigned airport opening hours.
2.3. Analysis
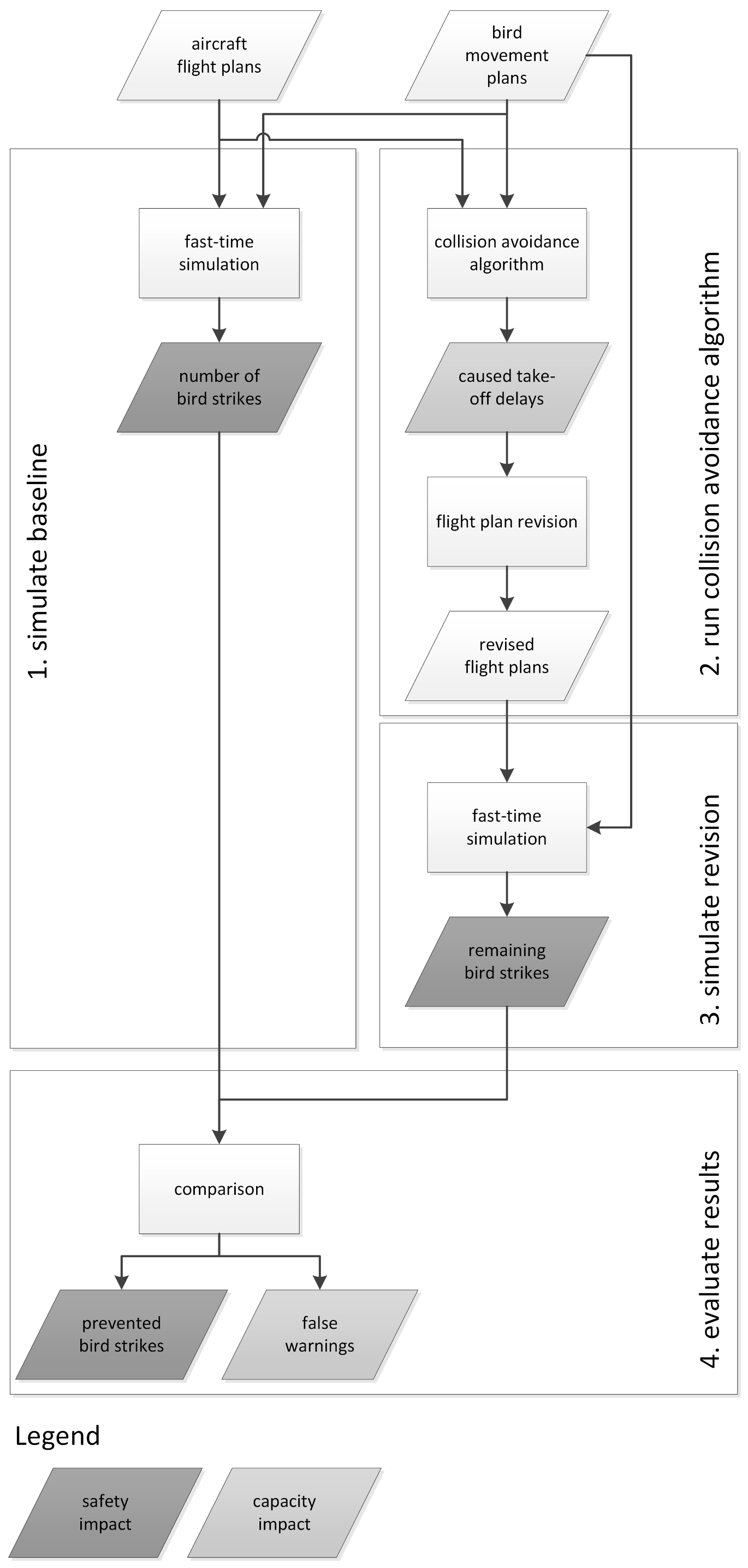
To validate the algorithm and to analyze its effect on runway safety and capacity, the four steps shown in
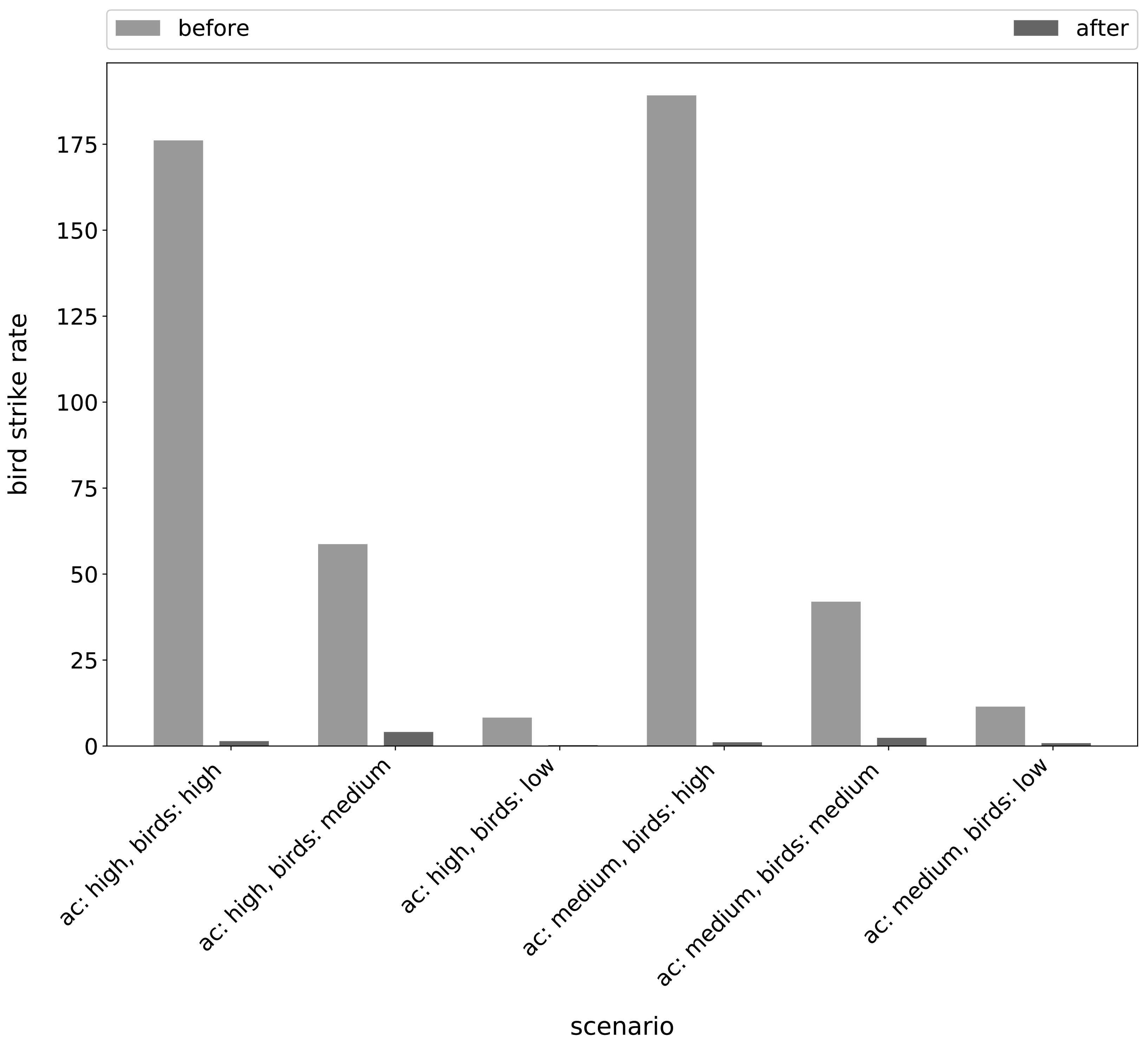
Figure 3 were performed. First, the randomized flight plans were simulated alongside the BMPs in fast-time. The number of strikes recorded indicate, how many strikes can be prevented and as such represent the safety potential of the algorithm.
Second, the collision algorithm was applied on all combinations of flight plans and BMPs, rescheduling departures where necessary. Third, the revised flight plans were simulated alongside the BMPs in BlueSky to test for collisions undetected by the algorithm. To evaluate if the algorithm generates superfluous warnings, it was checked in the fourth step whether the collisions prevented by the algorithm actually did take place in the baseline.
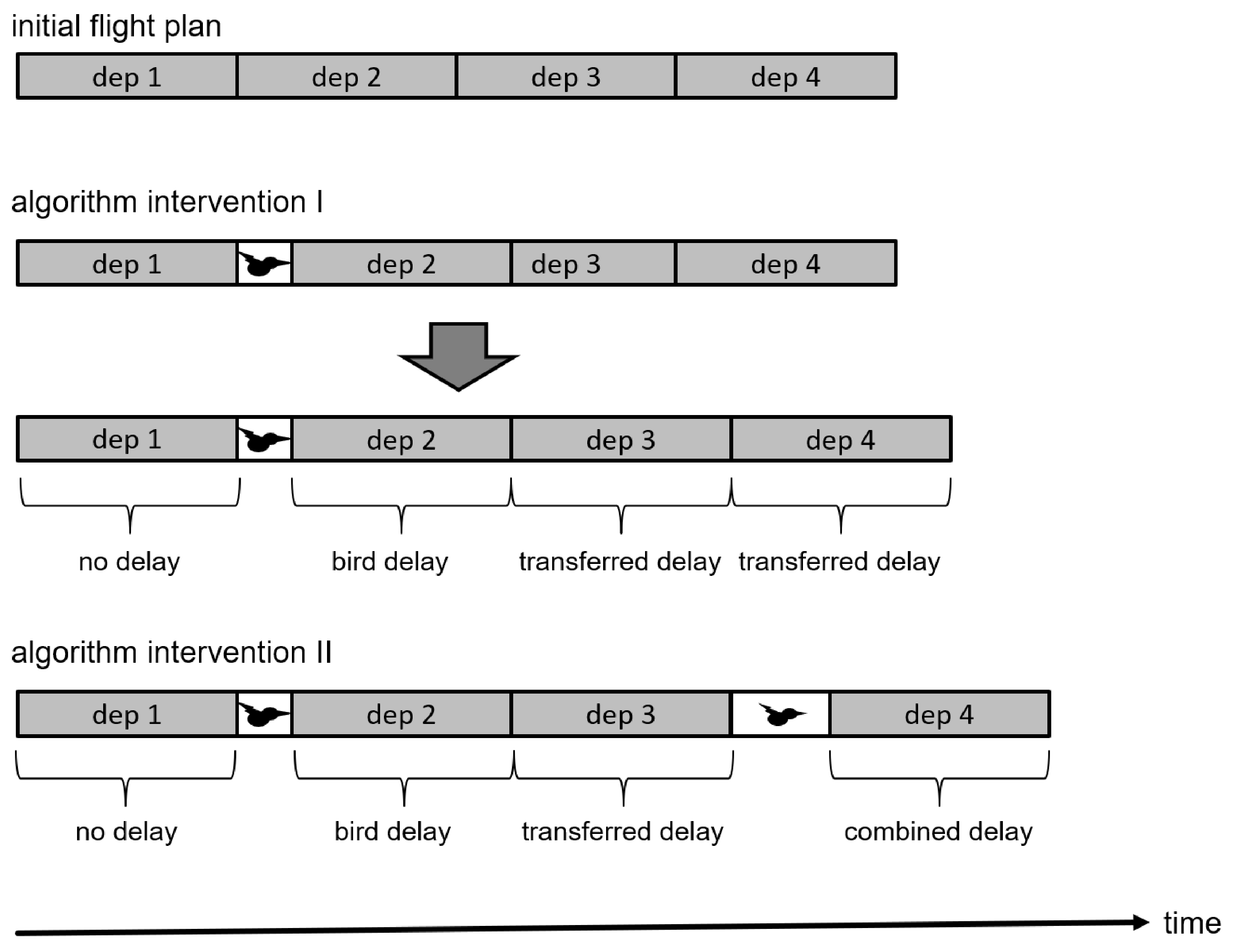
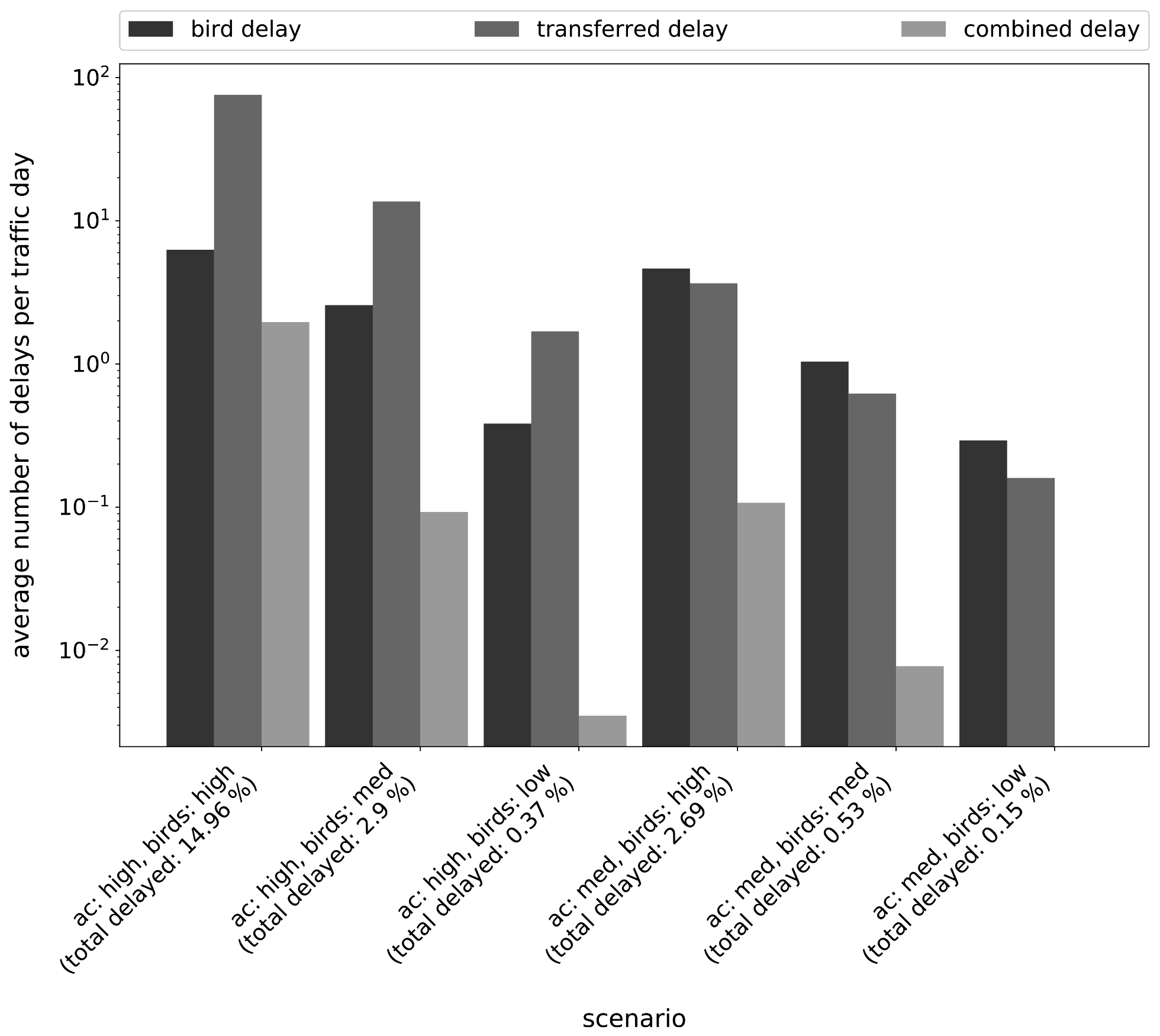
Aircraft delays within the revised flight plan have three potential sources. They can result from an intervention of the collision avoidance algorithm (bird delay) or a domino effect of a previously delayed departure (transferred delay). If an aircraft with a transferred delay has to be further delayed due to bird presence, it experiences a combined delay. The different delay types are presented in
Figure 4.
To analyze the shares of correctly prevented strikes and to identify false alerts, only aircraft solely delayed due to birds were considered. Since they did not inherit a delay from a previous aircraft, they encountered the identical bird movements as in the initial flight plans and are therefore comparable.
To analyze the impact on capacity, the delays generated by the collision avoidance algorithm to avoid bird strikes as well as transferred delays for subsequent departures were stored.

 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}