1. Introduction
Bird strike risk is highest at low heights and decreases with increasing heights [
1,
2]. Therefore, the vast majority of strikes happen below 1000 m and therefore in the low-level flight phases of take-off, initial climb, landing and approach [
3,
4]. The International Civil Aviation Organization (ICAO) requires airports to implement measures to decrease the risk of wildlife hazards at and in the vicinity of an airport [
5]. The procedures, which are airport-specific, can be grouped in the categories habitat management, exclusion, harassment, capture, and lethal methods [
6]. Research has shown that wildlife strike prevention at the airports, performed by dedicated Wildlife Control Units (WCUs), has led to a strong reduction in number of bird strikes at the airports themselves. However, there is an increasing trend of bird strikes outside the airport environment, which lies beyond the reach of the performed measures [
3,
7].
Therefore, additional measures for this area are required. This study addresses the concept of operational bird strike prevention, actively including pilots and controllers in the loop [
3,
8]. Currently, these parties are only marginally involved. For example, if high bird abundance is observed at an airport, the controllers can provide this information to the pilots via radio or, if the abundance is expected for longer periods such as during migration, in Notice to Airmens (NOTAMs) [
9,
10]. In the concept of operational bird strike prevention, which is considered here, controllers can support the pilots with dedicated real-time information of current bird strike risk. For this purpose, a bird strike advisory system would be implemented at the working position of the tower controller. Based on real-time sensor data, the bird strike prevention system continuously calculates the current bird strike risk. If required, the system alerts the controller who can directly adjust clearances. Introducing such a concept as an addition to currently implemented wildlife strike prevention measures is expected to enhance aviation and avian safety, especially outside the airport perimeter.
Surveillance technology such as avian radars tailored to locate and track birds are enablers for this operational bird strike prevention process [
11]. An increasing number of airports have been installing avian radars over recent years. The majority of these radars serves to provide the local bird strike prevention units with information to identify hot spots of bird activity [
3]. Air Traffic Control (ATC) usually has no link to the radar’s output. A promising exception is the King Shaka International Airport in Durban, South Africa. ATC can be advised to delay departing traffic in case of a high bird strike risk determined by a system based on radar observations [
12]. The situation at this airport is special in the sense that the risk which is warned of occurs twice a day when millions of wintering swallows cross the extended runway center line to move between resting and feeding areas. Hence, the timing and duration of these warnings are very predictable, and can therefore be effectively used by ATC.
The introduction of such a concept of operational bird strike prevention at airports with less predictable presence of birds faces multiple challenges. First, methods to predict local bird movement at the airport and in the surrounding area up to 1000 m as reliably as possible must be established. Second, a suitable level of support for the controller must be developed and evaluated. Potential levels of support range from visualizing the current and predicted bird tracks up to a system advising the controller when it is safe to use the runway [
13].
On the airport level, it is vital to research the influence of such a concept on the air traffic flows. The number of issued alerts and thus the number and duration of imposed delays as well as the effect on runway capacity depend on the predictability of the bird movement and the defined warning levels. Furthermore, the question to what extent bird strikes can be prevented at all, remains to be analyzed. The evaluation of these factors is the scope of this study. It builds on a previous analysis which researched the influence on traffic flows and the hypothetical maximum safety potential of such a system, independent of the effectiveness of any predicting algorithm [
8]. For this purpose, perfect predictability of bird movement was assumed. The results of that study also serve as a benchmark for more realistic implementations that do consider the limited predictability of bird behavior. In the idealized setting of the study, over 99% of strikes were prevented in the performed Monte Carlo simulations. Runway capacity could be maintained and the delays resulting from the preventive actions lay within reasonable limits for most scenarios [
8]. In the current study, the next step is taken by abandoning the assumption of perfect predictability, and replacing it with a prediction logic. A concept is proposed that calculates the risk of bird strikes, based on the currently detected presence and movements of birds.
3. Results
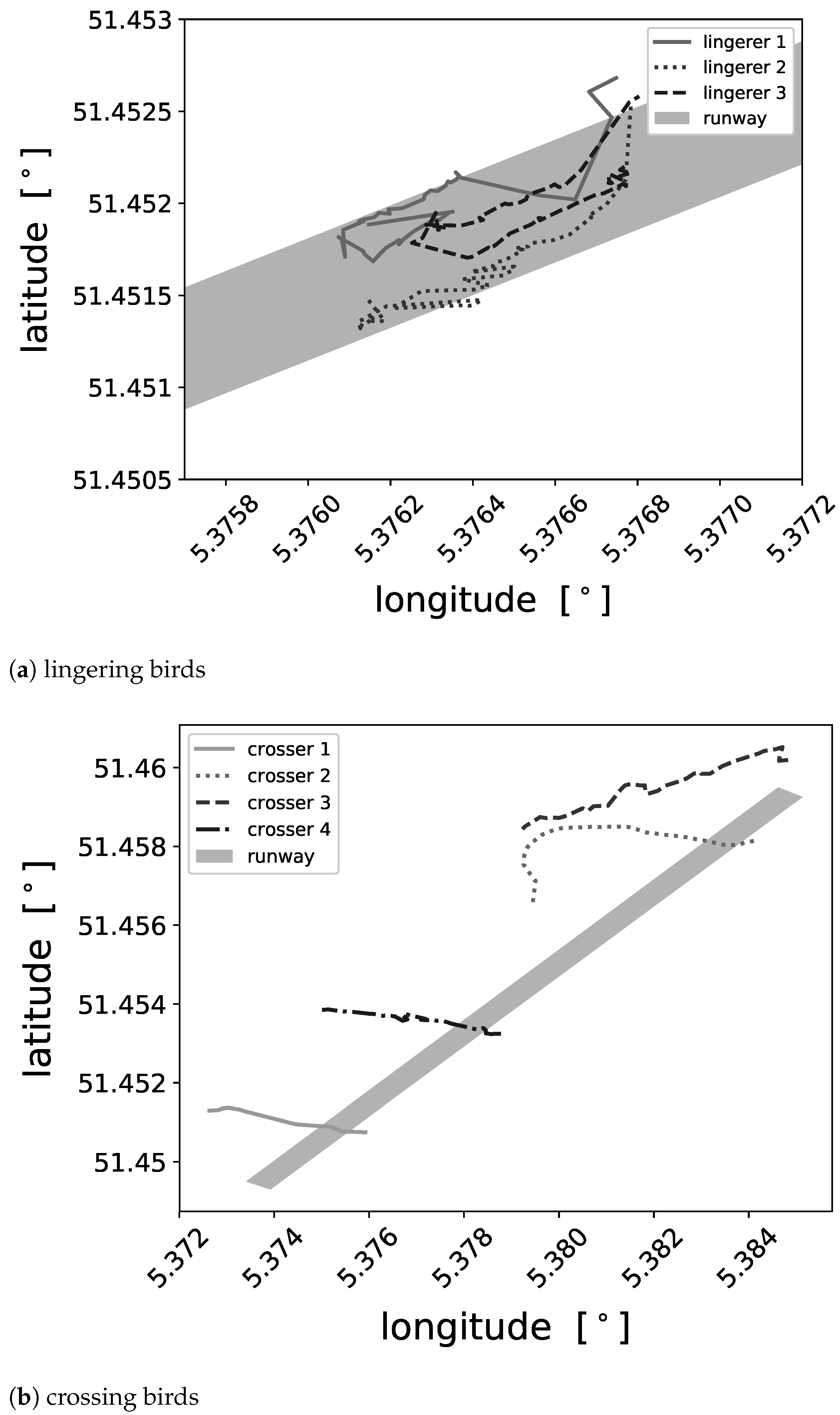
In this study, the effects of a bird strike advisory system on the safety and the traffic flows of an airport were evaluated. The bird strike risk algorithm underlying the system focuses on preventing strikes with birds crossing the runway which are expected to cause damage to the aircraft. Birds lingering on or close to the runway are excluded. The limitation to prevent potentially damaging strikes was performed to find a balance between safety and capacity, limiting the induced delays to a reasonable level.
The number of interventions and the resulting delays were considered first. The overview is provided by
Figure 5. The average number of delays and the distribution of their duration is comparable between the baseline and the validation. Delays above ten minutes and as such above a tolerable level were outliers. Their share amounted to 0.8% of delays in the baseline and 0.5% in the validation. All aircraft of all scenarios were able to depart within the designated airport opening hours. Hence, the capacity was not impaired.
To gain more insight into the origin of delays,
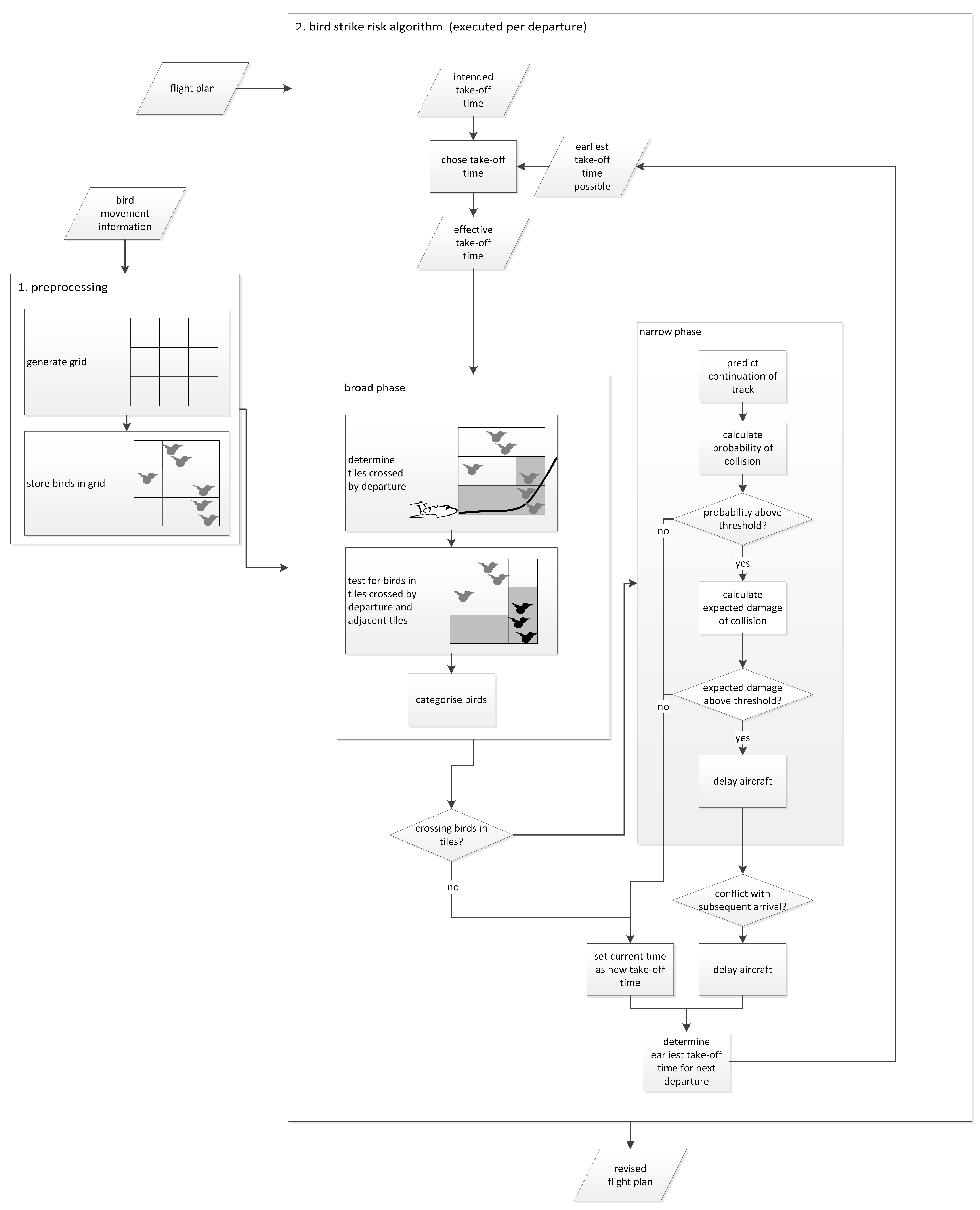
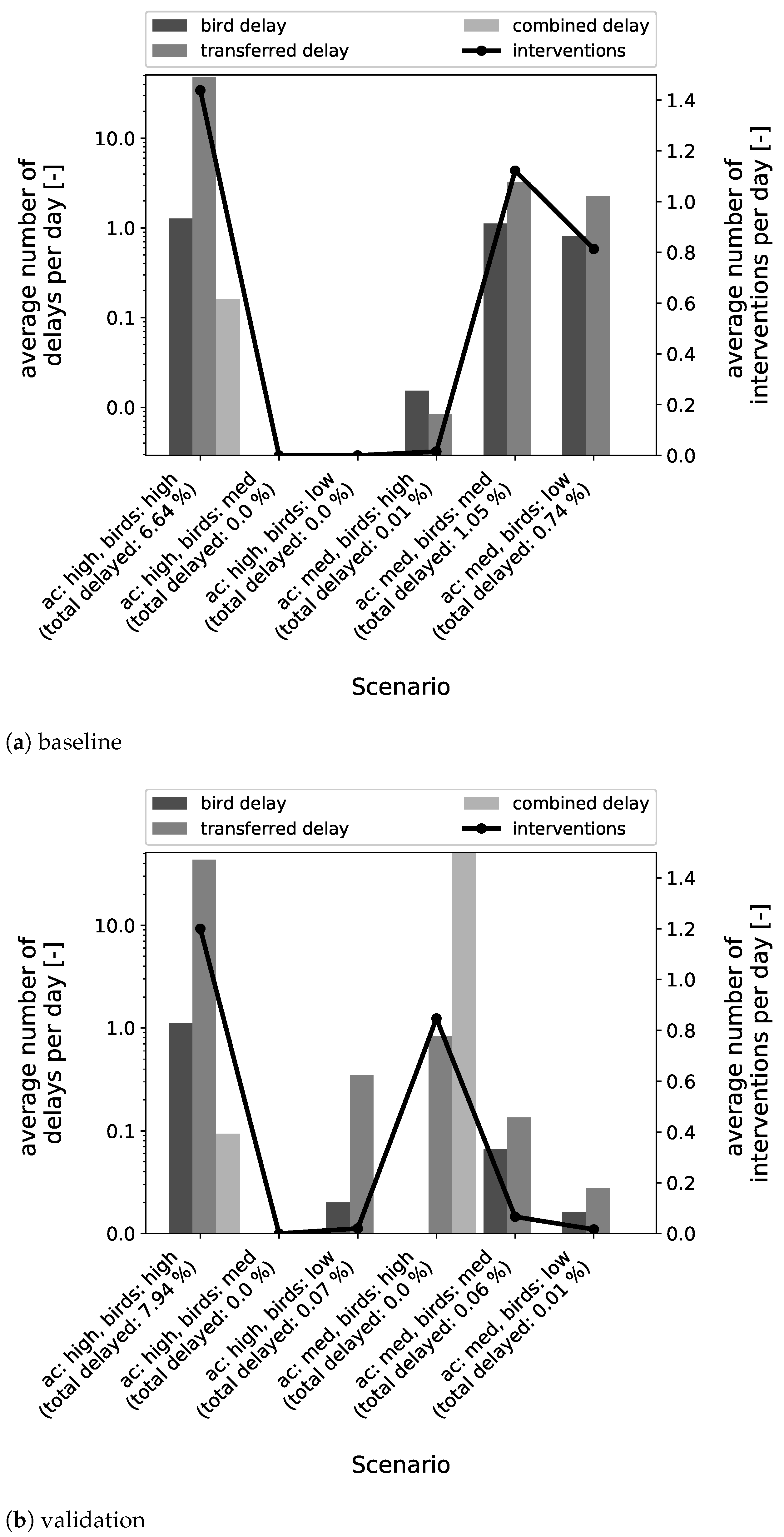
Figure 6 depicts the average number of interventions per day and scenario as well as the average number of generated delays. The average number of interventions per day and scenario is very low. In some scenarios, even no intervention at all took place. One intervention by the algorithm results in up to six delays in total. The delays additional to the ones caused to prevent a bird strike (
bird delay) are delays inherited from a previous departure (
transferred delay). If an aircraft with a
transferred delay receives a
bird delay, it is called
combined delay.
Transferred and
combined delays especially appear in the high air traffic scenarios, where the flight plans are denser, and a rescheduling of a departure is more likely to penetrate separation minima to subsequent aircraft. With the exception of the combination of medium air traffic intensity with high bird strike risk in the baseline, more inherited delays than bird delays take place.
To evaluate whether an intervention by the algorithm was successful, aircraft with a bird delay and without any inherited delay from a previous departure were considered. These had the same intended take-off times in the original and the revised flight plans. Therefore, they experienced the identical bird situation, which made them comparable. Testing whether these aircraft experienced a bird strike after having received a bird delay in the revised flight plan served as measure for successful interventions. For both the baseline and the validation, the share of comparable flights amounted to 95%. The algorithm prevented 139 collisions with crossing birds in the baseline and 9 in the validation. In the baseline, three of these flights experienced a strike with another bird than the targeted one. All other departures delayed due to bird strike risk departed collision-free. All comparable correct interventions were successful with respect to the target birds.
The bird strike rates for the original as well as the revised flight plans can be found in
Table 3. In the baseline, the strike rates slightly increases by 0.8%. In the validation, it decreases by 0.2%. When normalizing the number of prevented strikes by 10,000 flights, similar to the bird strike rate, the baseline has a prevention rate of 70 and the validation of 20. Still, the bird strike rates in the baseline are higher than in the validation.
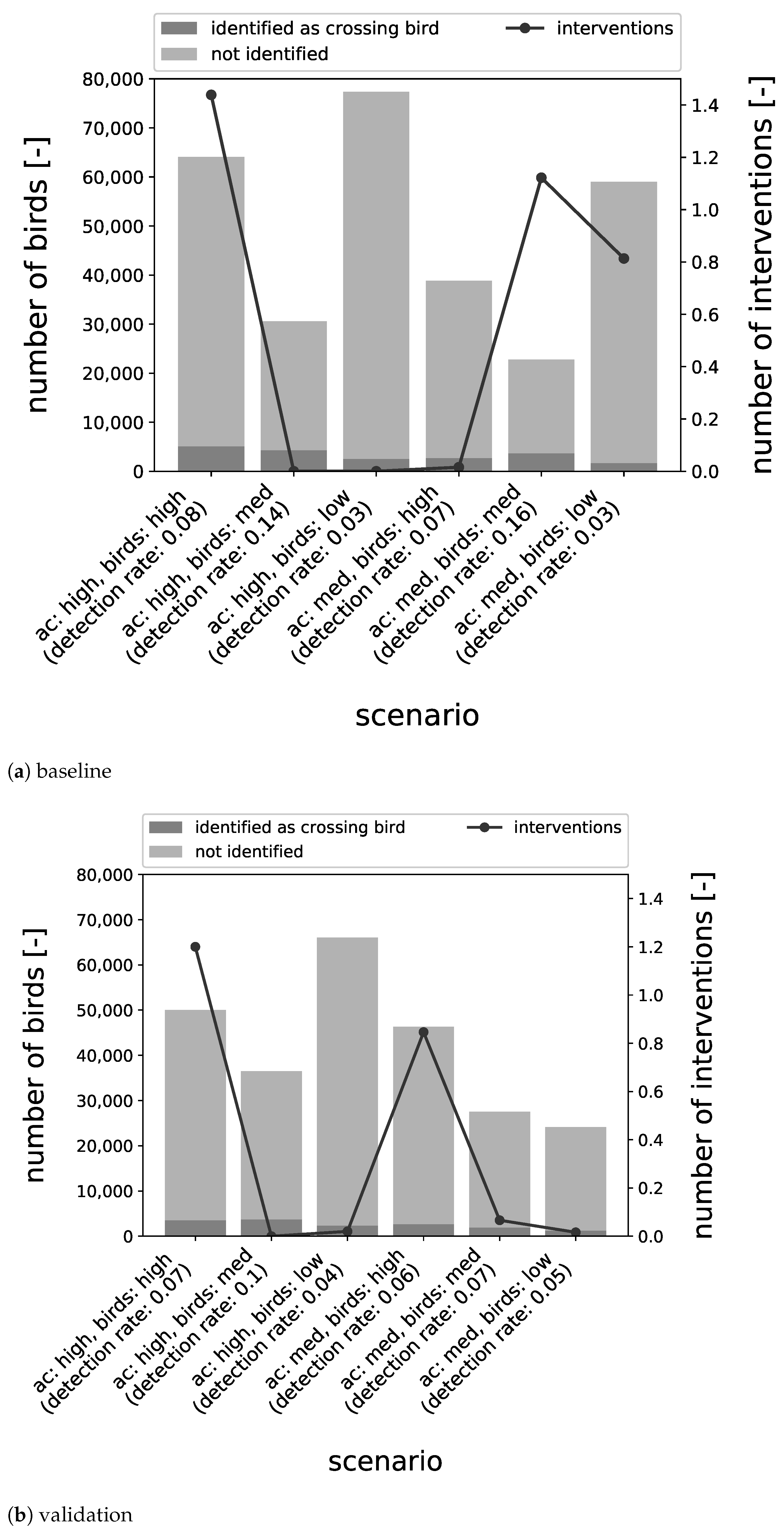
To analyze these opposing trends, the number of interventions were compared against the number of birds present in the airspace as well as the ones identified as crossing birds. The results are presented in
Figure 7. It must be noted that the bird scenarios were selected based on the strike risk they hold rather than number of birds (see
Section 2.3.2). The number of interventions and the number of birds present do not correspond well. For example, most birds occur in the combination of high air traffic intensity and low bird density in the baseline and the validation, but (almost) no interventions take place. Also, between the number of identified birds and number of interventions, there is limited consistency only. Moreover, even though the corresponding bird densities in the baseline and the validation originate from the same calendar weeks, numbers of birds as well as the detection rates vary.
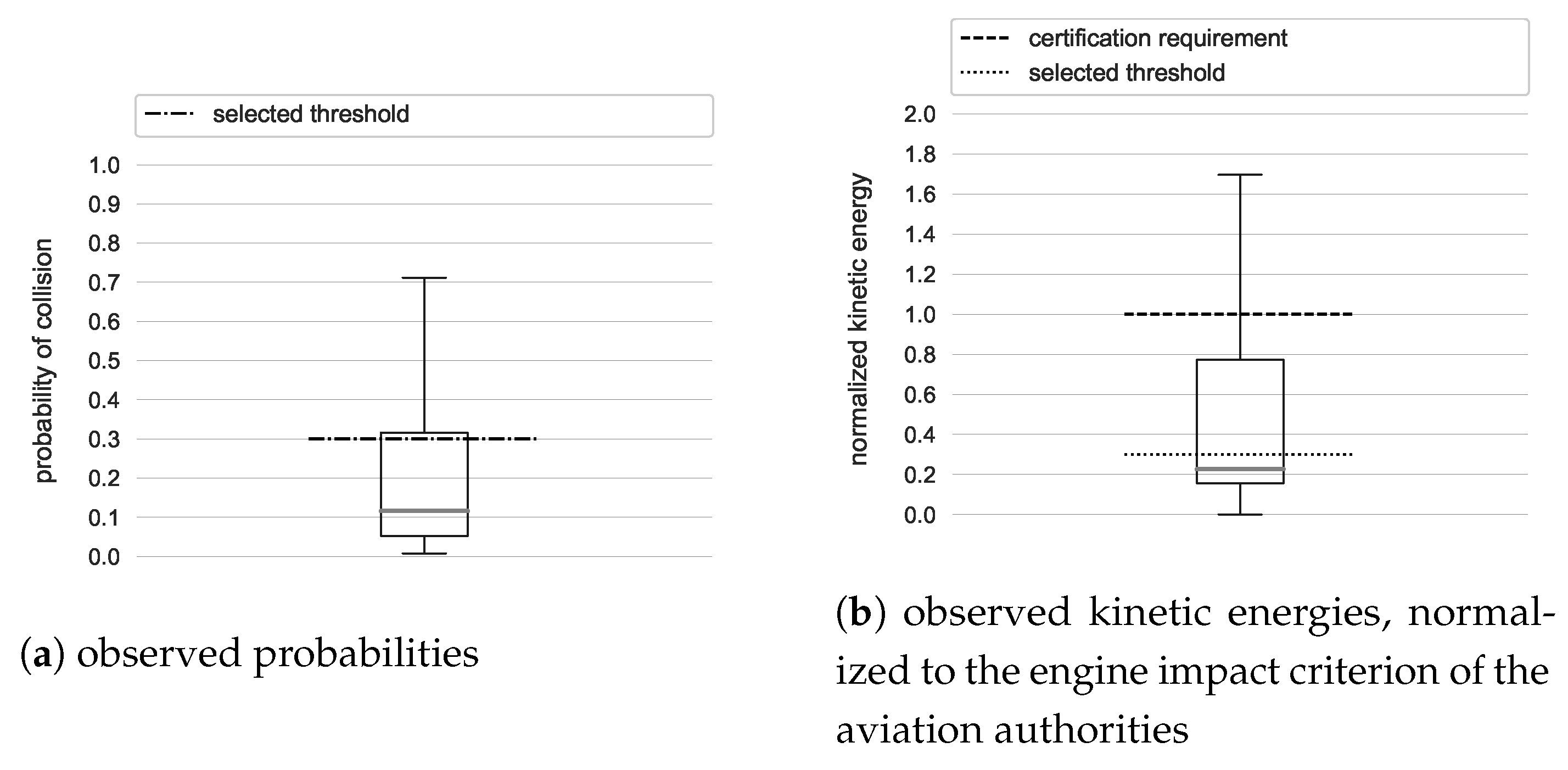
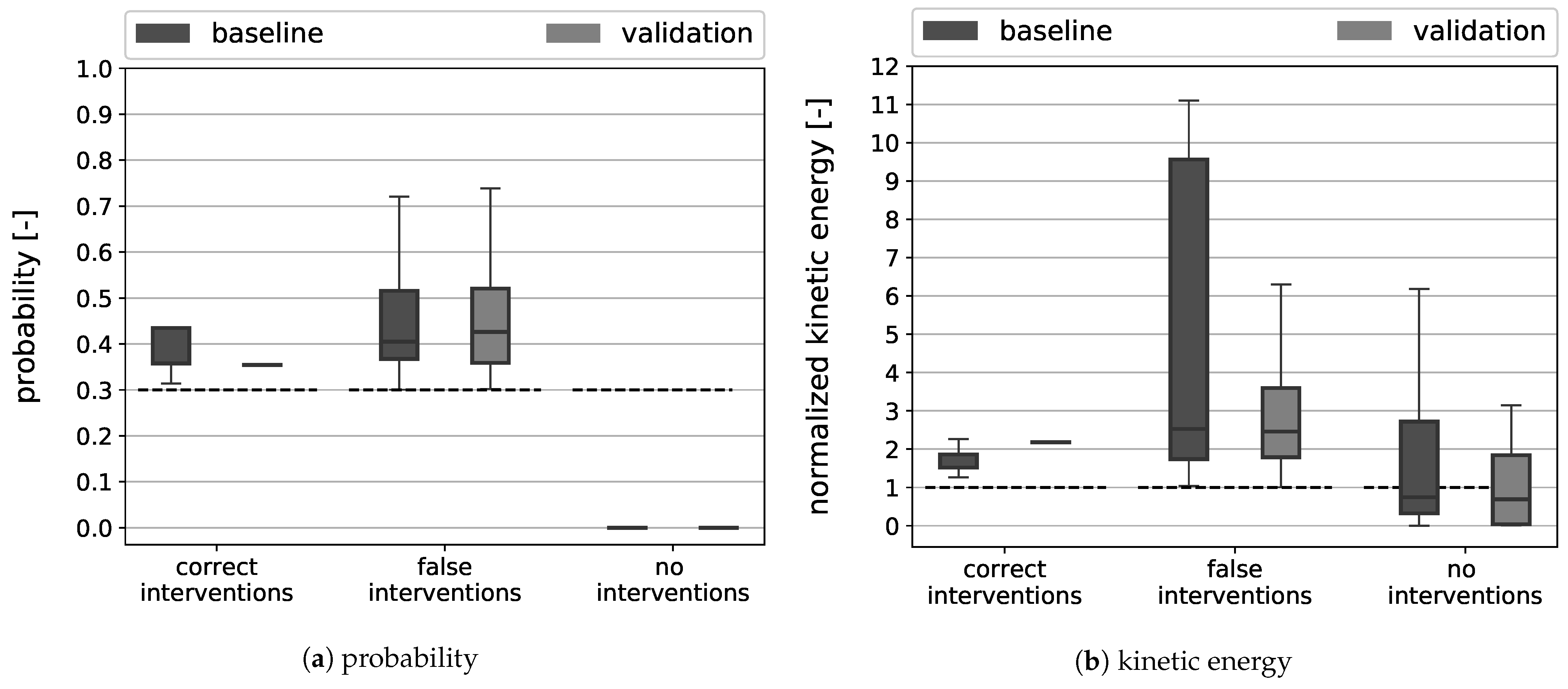
The decision to delay an aircraft depends on the determined values for risk as well as its factors probability and severity. If the three of them exceed the selected thresholds, an algorithm intervention is triggered. To evaluate the resulting interventions in detail, the analysis is performed individually for the probability and the severity. Their distribution for strikes where the algorithm intervened correctly or falsely are shown in
Figure 8. Moreover, the distributions where the algorithm did not intervene, and the aircraft then collided with birds are presented.
Figure 8a depicts the distribution of probabilities. They all are above the triggering threshold of 0.3 for correct and false interventions, as required for the triggering of the algorithm. The spreads are larger for false alerts, reaching higher probabilities than in the case of correct alerts. They are comparable between baseline and validation in case of false alerts. For correct alerts, the spread is much smaller for the validation than for the baseline. For missed strikes, the probabilities were just slightly higher than zero and as such far below the threshold to trigger an intervention.
Figure 8b illustrates the second risk element, the severity of strikes. Here, the predicted kinetic energy was normalized with the kinetic energy required to trigger an algorithm intervention. Hence, the threshold lies at one. The spreads of the baselines are higher than for the validations for all three alert types. In the case of correct alerts, the lower boundary of the predicted kinetic energies lies higher than for false alerts. The majority of strikes that were missed by the algorithm did exceed the threshold of kinetic energy. However, due to the small predicted probabilities as seen in
Figure 8a, no intervention took place.
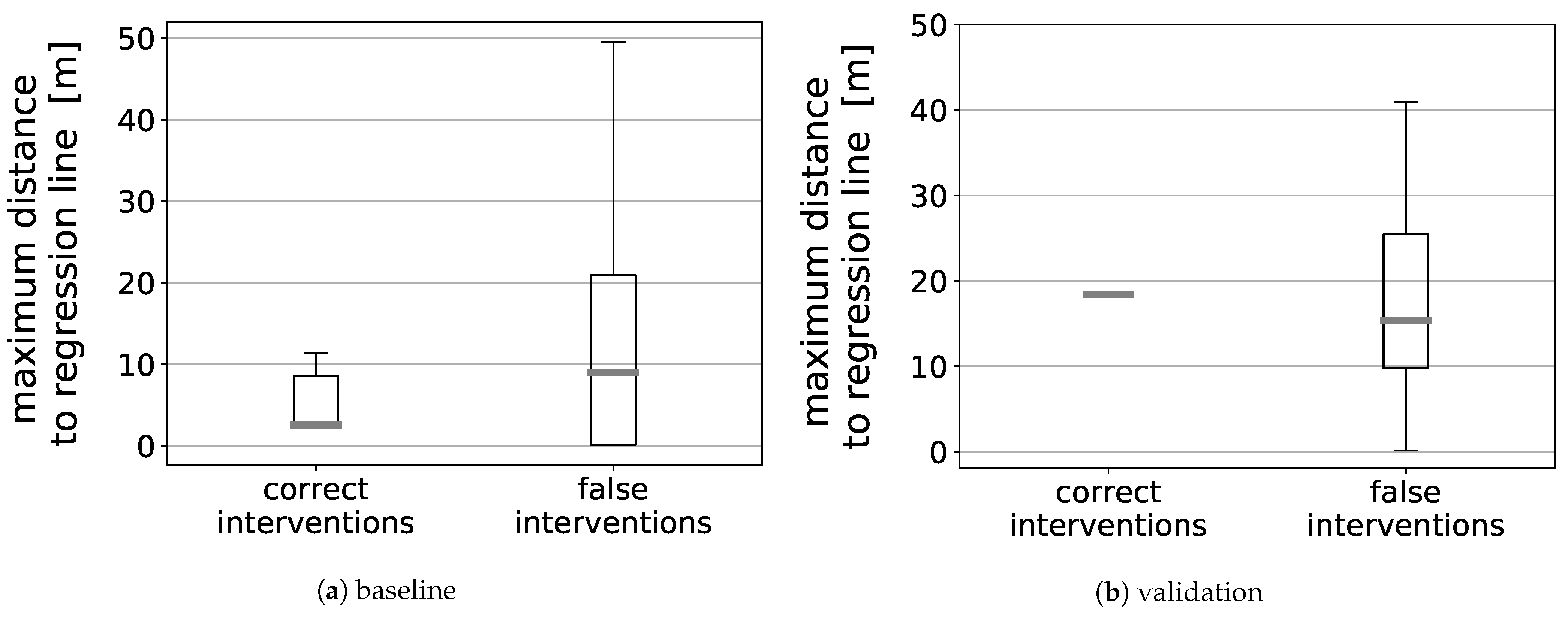
Finally, the quality of bird movement prediction which underlies the determined probability of a strike was evaluated for correct and false alerts. As introduced in Equation (
6), the probability of collision depends on the maximum distance from the regression line
and the variation in bird speed along the trajectory. The latter is expressed as time interval in which the bird is expected to cross the aircraft trajectory. To analyze the precision of predicted bird location, the maximum perpendicular distances between the bird positions known at the time when the future trajectory was predicted and the regression line,
, were analyzed. Their distributions for correct and false alerts are illustrated in
Figure 9. For both alert types, there is a wider spread at a lower level in the baseline than in the validation. Although the distributions of false alerts are to some extent comparable between the baseline and the validation, the distribution for correct alerts is much wider in the baseline, with a relatively high median of ca. 20 m in the validation.
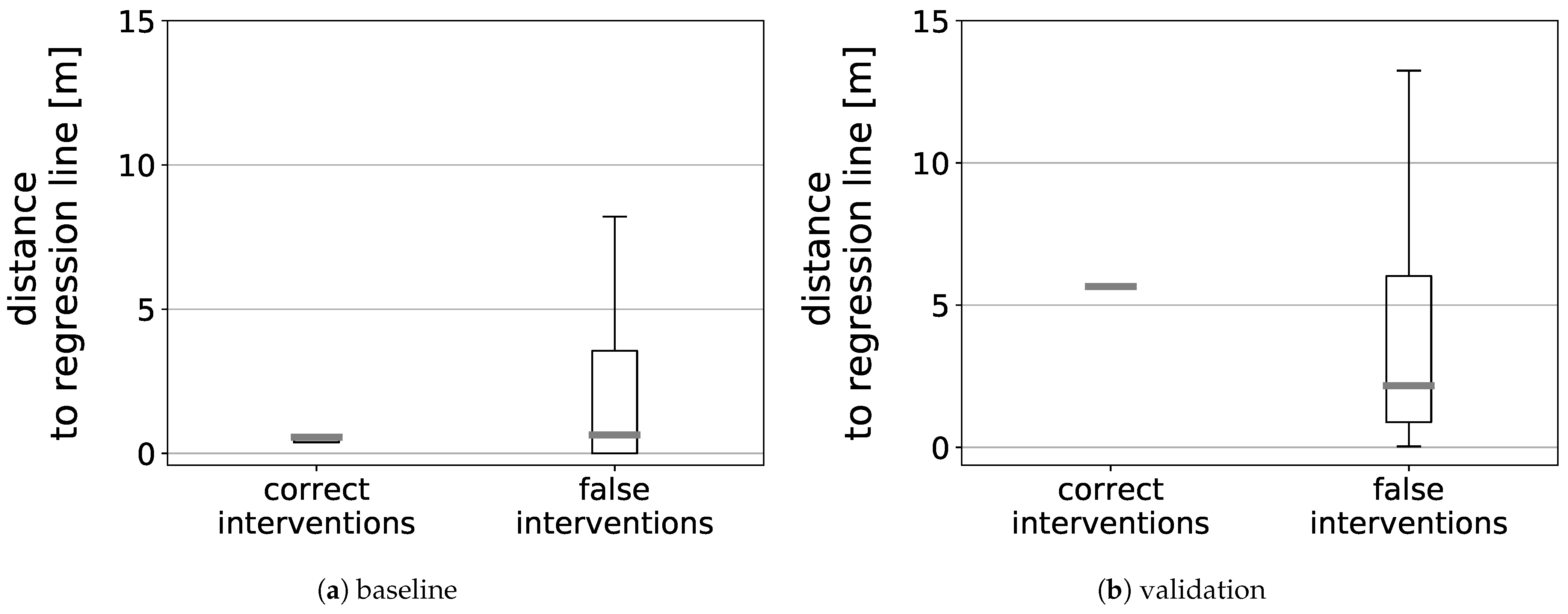
Figure 10 shows, how far from the regression line the bird was at the time of the CPA. In the baseline, the birds causing correct alerts are much closer to the regression line, with a small spread of values only. Also in for false alerts, the spread is smaller in the baseline than in the validation. However, here, the majority of birds triggering false alerts are closer to the regression line. The majority of offsets for false and correct alerts lay well below ten meters. All offsets were smaller than
.
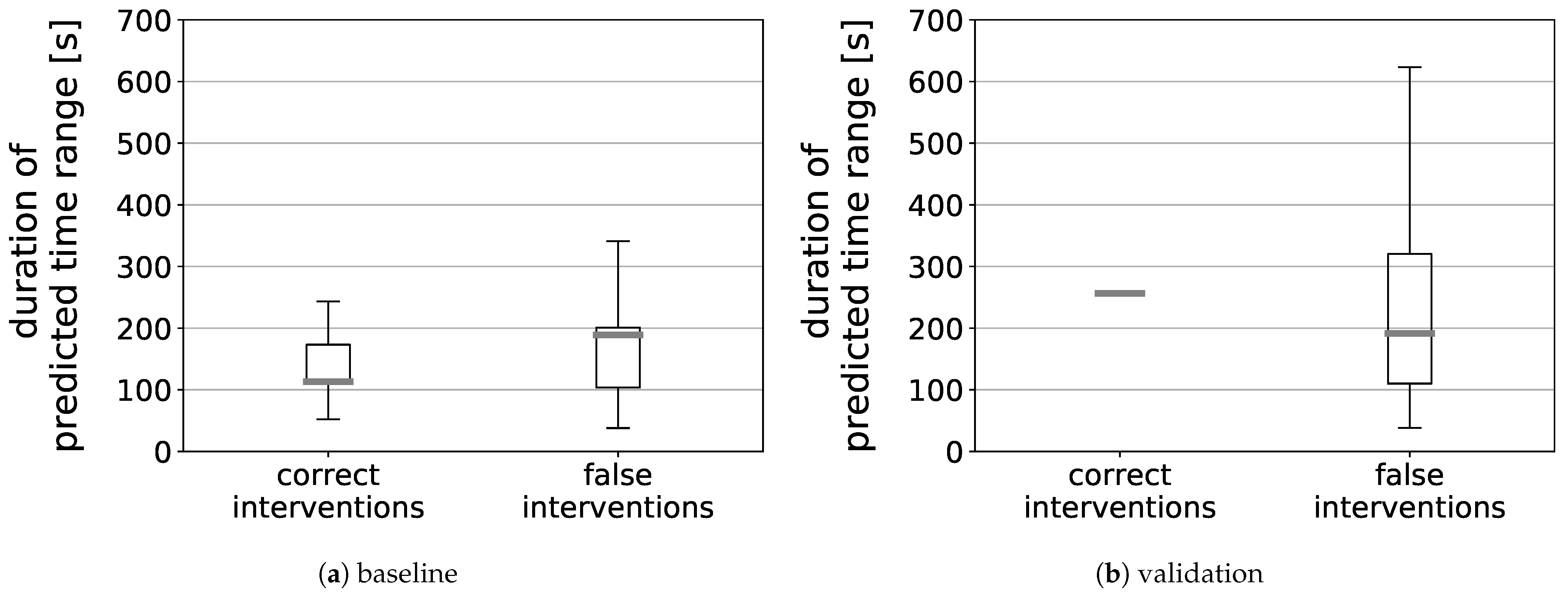
To evaluate the precision of predicting the time of arrival at the CPA, the period between the earliest and latest expected arrival time is shown in
Figure 11. In the baseline, the spreads for the false alerts are slightly higher than for the correct interventions. In the validation, it is much higher for the false interventions. However, there are also smaller time intervals than observed for the correct alerts. The predicted time ranges span up to 300 s for correct alerts and up to 650 s for false alerts. This indicates a high variability in bird velocities, especially for birds causing false alerts.
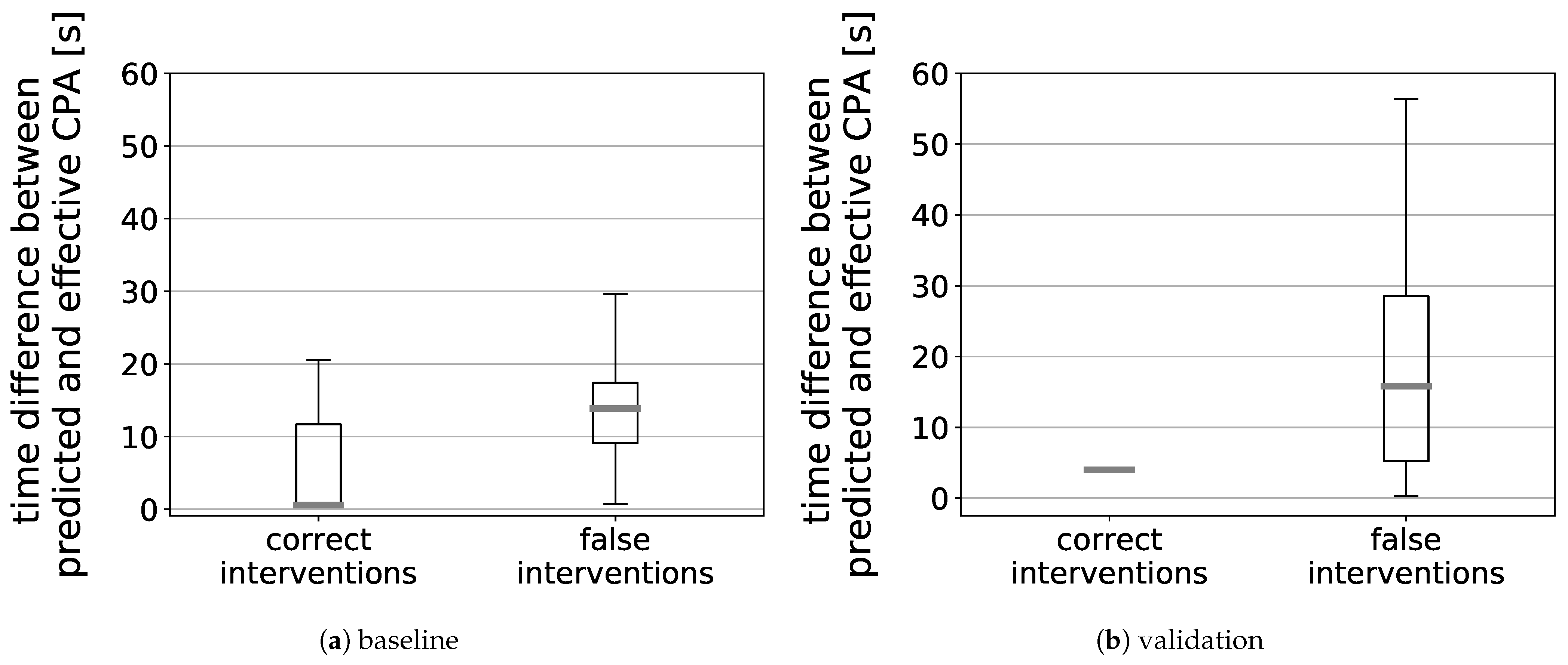
When considering the difference between predicted and effective time of the CPA depicted in
Figure 12, the much higher precision for the correct alerts becomes visible for both the baseline and the validation. Although birds which cause correct alerts arrive with a maximum time offset of 20 s at the CPA, the difference amounts up to almost 60 s for false alerts. The birds always arrived either earlier than or within the predicted time range. When considering correct alerts, 33% of birds arrived earlier, 67% within the predicted time range in the baseline. In the validation, all these birds arrived within the predicted time range. Regarding the false alerts, 16% of birds arrived earlier and 84% within the predicted time range in the baseline. In the validation, 13% if birds arrived earlier than and 87% within the predicted time range.
4. Discussion
In an initial study, the strong potential to enhance avian and aviation safety by implementing a bird strike advisory system in the idealized conditions of perfect predictability of bird movement was demonstrated [
8]. This study enhanced the algorithm with a module to predict bird movement and to calculate the risk of bird strikes.
In the optimized settings of the initial study, where the algorithm aimed at preventing strikes with all birds in the airport environment, imposed delays could exceed acceptable levels for tight flight plans. This indicated bird strikes to be warned off need prioritization to keep delays and impact on runway capacity reasonable.
Since birds lingering on and close to the runway were identified as being overrepresented in the input bird data and, in addition, are already in the scope of currently implemented prevention measures, they were excluded for the study presented here. Hence, the algorithm focuses on strikes with birds predicted to cross the extended runway center line. Moreover, only these birds which were expected to cause damage to the aircraft, caused an intervention of the algorithm.
The reduction of interventions to be considered resulted in acceptable delays imposed on departures. Only 0.8% of delays exceeded the acceptable threshold of ten minutes in the baseline, 0.5% in the validation. The maximum observed delay amounted to 21 min, representing an outlier. All aircraft were able to depart within the airport opening hours. Hence, the airport capacity could be maintained. This was true even though the thresholds to trigger an intervention were set relatively low, to 0.3 for probability and severity individually, and to 0.09 for their product, to obtain a sufficient number of interventions for the analysis. Hence, the hypothesis for tolerable delays in all scenarios was confirmed.
If there is a danger of interventions influencing the traffic flow too strongly in real-life operations, especially the severity criterion could be adjusted. However, it should be kept in mind that the severity of a strike can also be increased due to, e.g., hits of multiple birds into different aircraft components, which was not considered here. Additional research might be required to refine the definition of the severity criterion itself.
The algorithm succeeded in preventing bird strikes. Still, the overall bird strike rates did not significantly change for the revised flight plans. This resulted from strikes experienced by aircraft inheriting delays from departures which were delayed due to bird strike risk. This is connected to one-sided effects of changing the take-off time of an aircraft. An aircraft that departs collision-free when taking off as intended, either departs collision-free after rescheduling or experiences a collision. Collisions can therefore only be added but not removed for aircraft that initially took off without a bird strike. Hence, in case of birds hard to predict, the additional strikes happening to aircraft that experienced inherited delays can compromise the safety benefits by correctly prevented strikes. These additional strikes were either caused by birds that could not be seen by the algorithm due to taking off after the aircraft or due to an insufficient number of known positions to predict their track. Consequently, the hypothesis of a reduction in bird strike rates could not be confirmed for this implementation.
Most of the bird strikes where the algorithm decided against intervention, exceeded the damage criterion. However, since their probability stayed below the criterion, the algorithm was prevented to intervene. This was true even though the probability threshold was set to a relatively low value of 0.3 which implies an insufficient precision in the prediction of bird movements. The prediction logic builds on linear regression of the bird track known at the time of intended aircraft take-off, including uncertainty buffers to allow for lateral deviations and speed variation along the track. In the parallel direction, the distance between the bird and the predicted track in form of a regression line is relevant. For both correct and false alerts, the offsets at the time of CPA were low with a maximum of 15 m for false alerts. This still lies in a position range which could be correctly detected as a threat for collision or as harmless. The larger imprecision arises from the perpendicular direction, where the predicted time interval at the CPA is relevant. Even for correct alerts, the predicted intervals lasted up to 300 s. For false alerts, they spread up to 650 s. Since the time intervals are calculated based on the minimum and maximum bird speeds along the known part of the trajectories, this indicates high variability in bird velocity, resulting in a high uncertainty, when the bird will cross the runway. This is indicated by the offset between the predicted and effective arrival of the birds at the CPA. Their maximum ranges to 20 s for correct interventions and to 60 s, which is still large, but smaller than the wide spread of time ranges suggest. When comparing the results in the parallel and perpendicular directions, it seems that the predictability of flight direction is higher than the predictability of bird velocity.
Adjusting the probability calculation to base the probability in the perpendicular direction on the expected time of arrival at CPA rather than the predicted time interval could slightly improve the results. However, since there still are relatively large offsets of up to 60 s considering the false alerts, the success of that measure might be limited. To achieve more realistic predictions, a more sophisticated approach is recommended. As such, deep learning on multi-year data of bird movement could be performed to develop site-specific bird movement models. Since radar is limited in the ability to distinguish between individual bird species, the inclusion of data from different sensors such as video- or infrared-based technology or even observations performed by humans or drones should be considered.
The avian radar data used in this study was limited in its range. Hence, tracks of birds flying in higher altitudes were modelled from bird densities obtained from weather radar. Due to the small update rate of this radar type of five minutes, a small change in heading can quickly lead to a deviation from the predicted direction of flight and thus contribute to the imprecision of the selected prediction approach. Recently, the range of avian radar technology has increased to cover more of the critical areas outside the airport boundaries. Incorporating these data is expected to increase the prediction results when using the method of this study. These data also include height information and as such allow the thorough study of bird movement supporting the development of more sophisticated methods to predict bird movement as described above.
The number of interventions varies among the combinations of air traffic intensities and bird movement densities. A higher abundance of birds or even a higher number of birds identified as crossing birds does not necessarily imply a higher number of interventions by the algorithm. The variation of flight plans is, especially in the high air traffic intensity scenarios, limited by the number of flights that must be performed within the airport opening hours. Hence, the main variation is achieved by the different bird movement flight plans. This is demonstrated by the difference of factor 1.3 between the bird strike rates in the baseline and the validation. This difference occurs even though the bird movement information for the same bird densities in the baseline and the validation originate from the same calendar weeks. Hence, the bird abundance and the behavior of birds leading to risk of air traffic seems to be strongly individual from one day to the next.
The variability between baseline and validation is also observed in the other metrics evaluated in this study. The differences of prediction precision (
Figure 9,
Figure 10,
Figure 11 and
Figure 12) are larger for the validation. In contrast, the calculated probabilities and damaging potentials spread wider for the baseline in all cases. The latter could result from the larger data set used in the baseline. However, since the predictions themselves spread wider for the validation, this rather indicates the high variability in bird movement even within one calendar week. Factors influencing the bird strike risk from the bird perspective in such a short period might include different weather conditions. Since bird movement information was selected from days with little or no precipitation to get maximum detection rates by the radar [
27], other factors such as wind, temperature, cloudiness or humidity might play a role. To achieve a prediction, when the bird strike risk is highest even within the same season and when algorithm interventions are most appropriate, a more in-depth study on the dependencies of bird strike rates of weather conditions is needed. This knowledge could be useful for refining the algorithm and for implementing relative thresholds to trigger interventions depending on the current situation.


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}