To verify whether the built full-size model and simplified model are high-precision models and the rationality of the simplified method applied for building the simplified model, the component-level and complete machine-level verification tests were conducted. The component-level verification test included a component drop test and a component drop-weight compression test. The model in which the concentrated mass block was removed from the complete machine model is termed as the component model, where the concentrated mass block included the battery, motor and camera gimbal. The complete machine-level verification test covered the complete machine positive posture drop test and the complete machine vertical posture drop test. In this chapter, the test methods and test results of the component test and the whole machine test were elucidated, and the built full-size finite element model of the drone were compared and verified by four sets of tests. The verification method falls to three aspects, that is, impact load change trend, impact load peak error and drone deformation response. The four sets of experiments were also adopted to verify the accuracy of the simplified model built below and the rationality of the simplified method proposed.
3.1. Component-Level Experiment
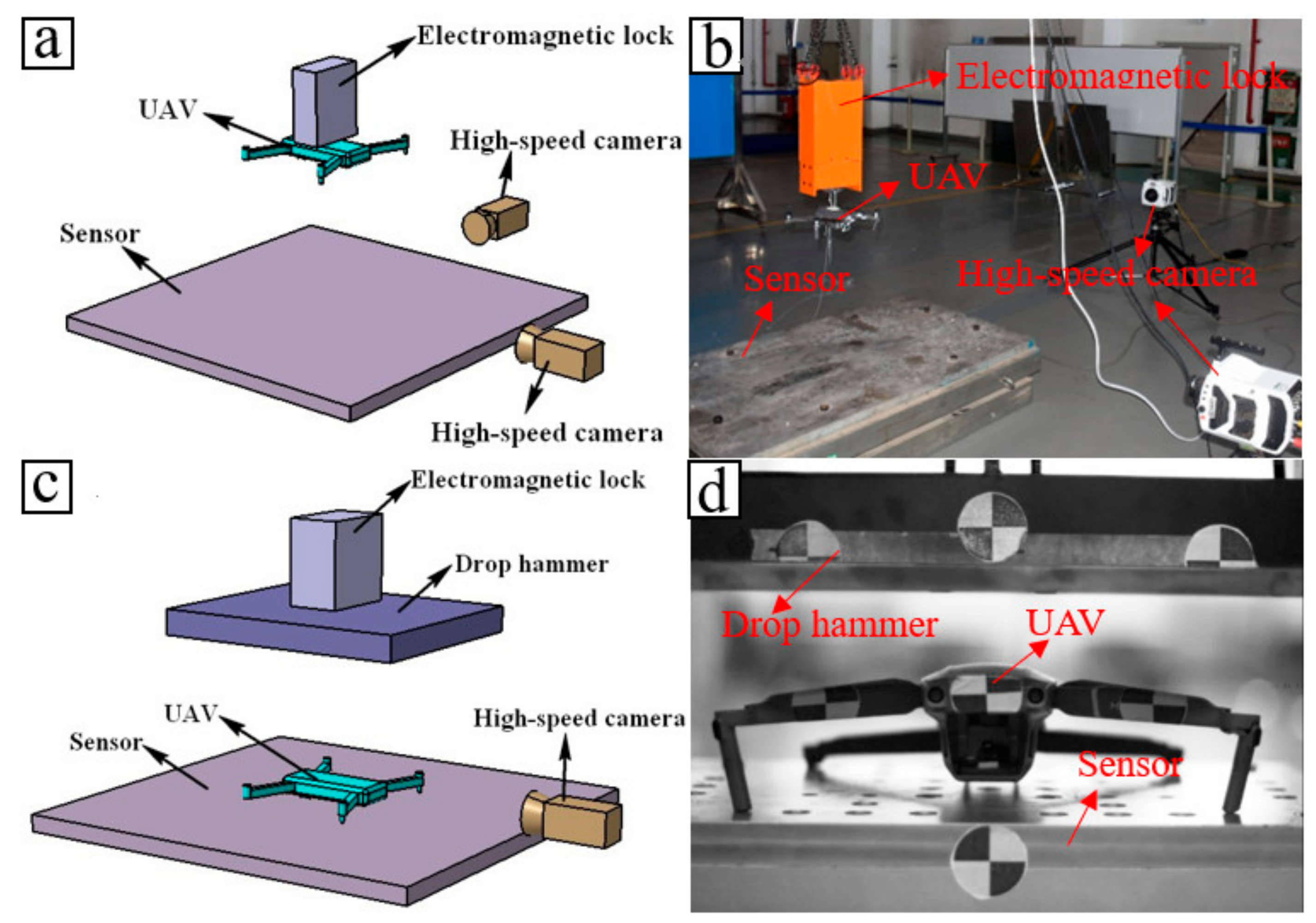
The component-level verification test covered a component drop test and a component drop-weight compression test. The two sets of experiments were performed with the identical experimental device. The main equipment applied in the test comprised a drone, a test lift release system, a force measurement platform (load sensor), a high-speed camera, and a piece of data acquisition equipment.
The component drop test was performed based on the free fall method of the drone component. The schematic diagram of the experimental device is shown in
Figure 3a, and the experimental layout is presented in
Figure 3b. The drone component drop test items were largely comprised of drop impact load, drop attitude, drop speed, and drone component deformation response. The impact load was measured with the load sensor of the force measurement platform with a sensor sampling rate of 10 kHz; the drop posture, falling speed, and deformation response of the drone components were measured and recorded with two high-speed camera systems arranged on the front and side of the force measurement platform, respectively. During the test, the drone components were installed and suspended on the electromagnetic lock. In addition, the electromagnetic lock and the drone components were lifted to the target height by the lifting device, and their posture was appropriately tuned to align with the center area of the force measurement platform. After each system was ready for the test, the electromagnetic lock released the drone components, the free fall fell and hit the load sensor, and the test subsystems were triggered synchronously. Then, the test ended under the completely stationary test piece. Combined with the average flight speed of the drone, the target falling speed of the test drone was 9~10 m/s, and the target lifting height of the drone was 5 m.
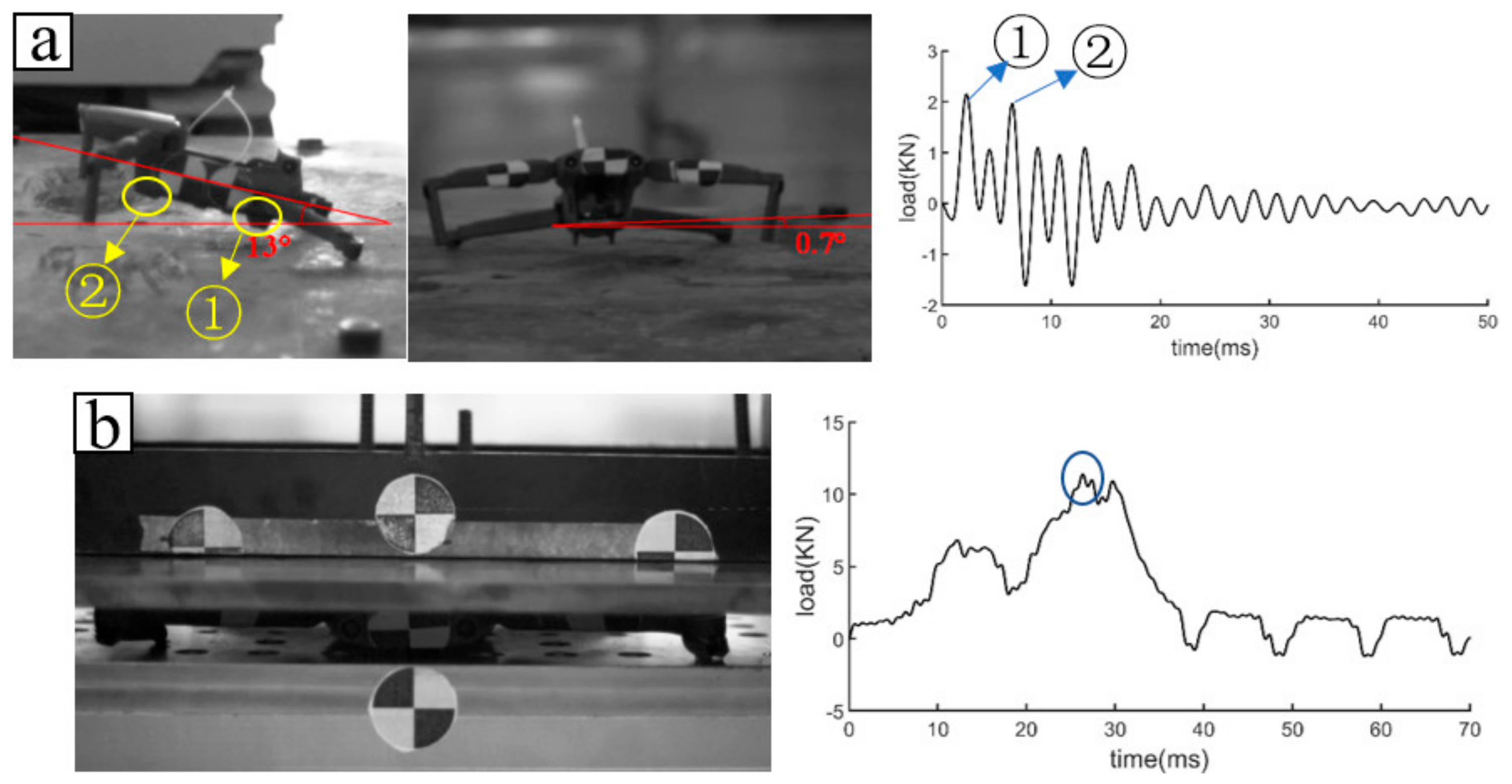
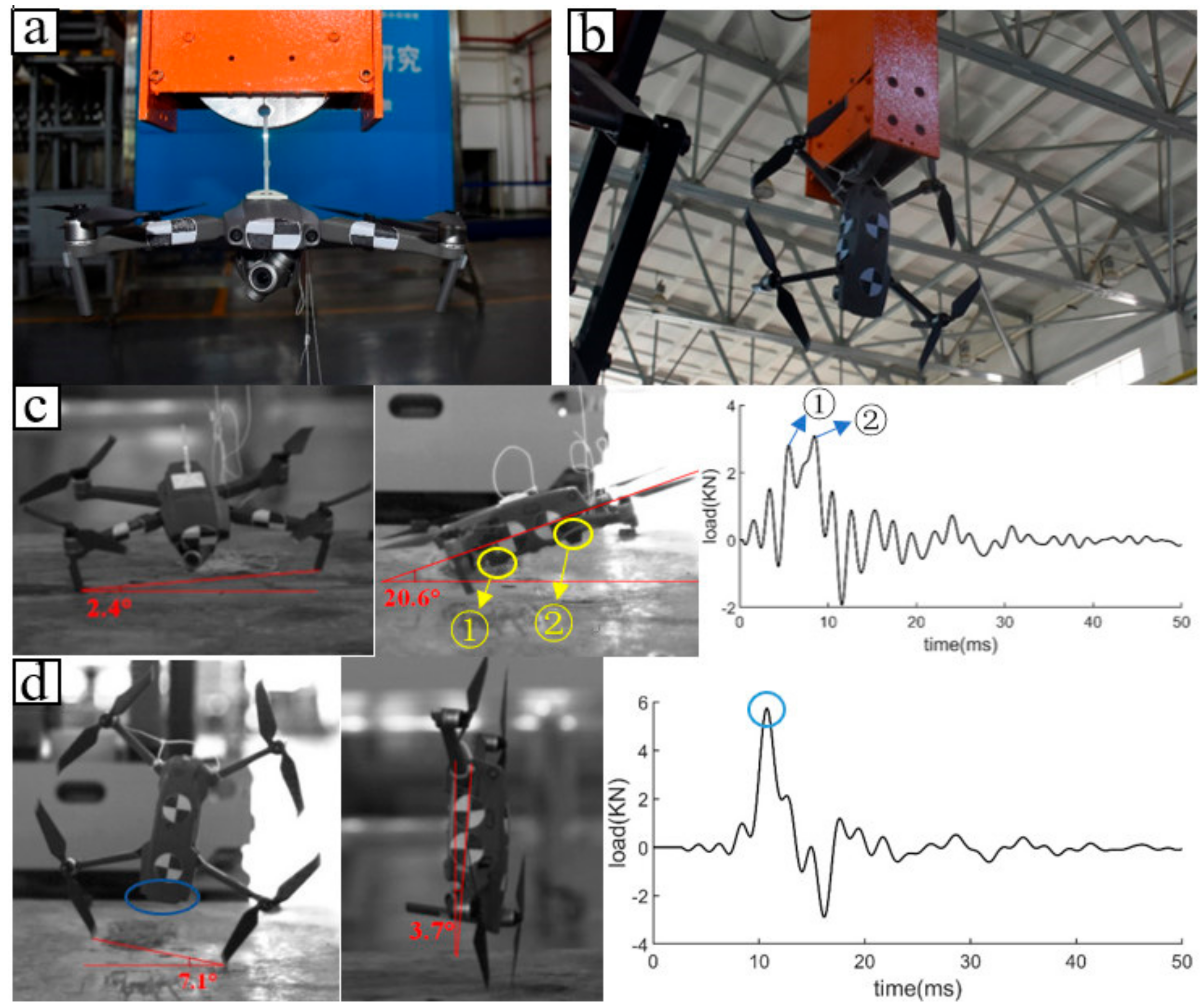
Figure 4a gives the drop posture of the drone components at the moment of landing and the impact load of the drone on the sensor. The speed of the drone at the moment of landing captured with the high-speed camera was 9.05 m/s, the deflection angle was 0.7°, and the pitch angle reached 13°, that is, a typical single-point crash. The impact load of drone components covered two wave crests. The first wave crest represents the time when the bottom silicone pedestal of the drone component (marked as ① in
Figure 4a) completely landed, and the second wave crest corresponds to the time when the protective plate at the front end of the bottom plate of the drone component (marked as ② in
Figure 4a) completely landed.
The component drop-weight compression test was performed based on the free fall of the drop hammer. The schematic diagram of the experimental device is given in
Figure 3c, and the experimental layout is shown in
Figure 3d. The test items of the drone component drop-weight test primarily included the compression impact load, the initial velocity of the drop hammer, as well as the deformation response of the drone component. The compressive load was measured with the load sensor of the force measurement platform; the initial velocity of the drop hammer and the deformation response of the drone components were measured and recorded by the high-speed camera system arranged on the front of the force measurement platform. In the test, the drop hammer was installed and hung on the electromagnetic lock, and the electromagnetic lock and the drop hammer were elevated to the target height by the lifting device, and their position and posture were tuned to maintain a horizontal posture. The drone component was placed horizontally on the load sensor, and the geometric center of the drone component was aligned with the geometric center of the drop hammer to ensure the drop hammer to completely fall on the drone component. After each system was ready for the test, the electromagnetic lock released the drop hammer, which hit the drone components vertically, triggered each test subsystem simultaneously and ended the test after the drop hammer turned completely stationary. Given the significantly high probability of a collision between a drone and a driving car, the impact speed of the drop hammer in this test was determined according to the speed of the collision between a normal driving car and a drone. This study assumed that the speed of a normal car in the urban area is 50 km/h, and the speed of a drone flying at full speed was 20 m/s. When the drone collided with a normal driving car from opposite directions, the relative speed of the collision was about 33.35 m/s. The weight of the component-level drone reached 345 g, and the weight of the drop hammer was 47.75 kg. In this scenario, assuming that the car is stationary, the drone hit at a speed of 33.35 m/s, and the corresponding kinetic energy was 191.8595 J. In the practical test, the drone was at a standstill, and the falling hammer moved. Next, the kinetic energy of the drop hammer at the moment of contact with the drone was 191.8595 J, and the corresponding speed of the drop hammer was 2.835 m/s. Thus, the lifting height of the drop hammer in this test reached 0.41 m.
Figure 4b plots the compression load curve measured with the load sensor and the maximum value of the compression load (marked in
Figure 4b) corresponding to the deformation and destruction of the drone component when the drone component was being compressed with the drop hammer. Then, the fuselage was severely deformed, and the connections between the two front arms were disconnected. The actual speed at the moment when the drop hammer touched the drone component captured with the high-speed camera was 2.82 m/s.
3.3. Comparative Verification of Full-Size Model
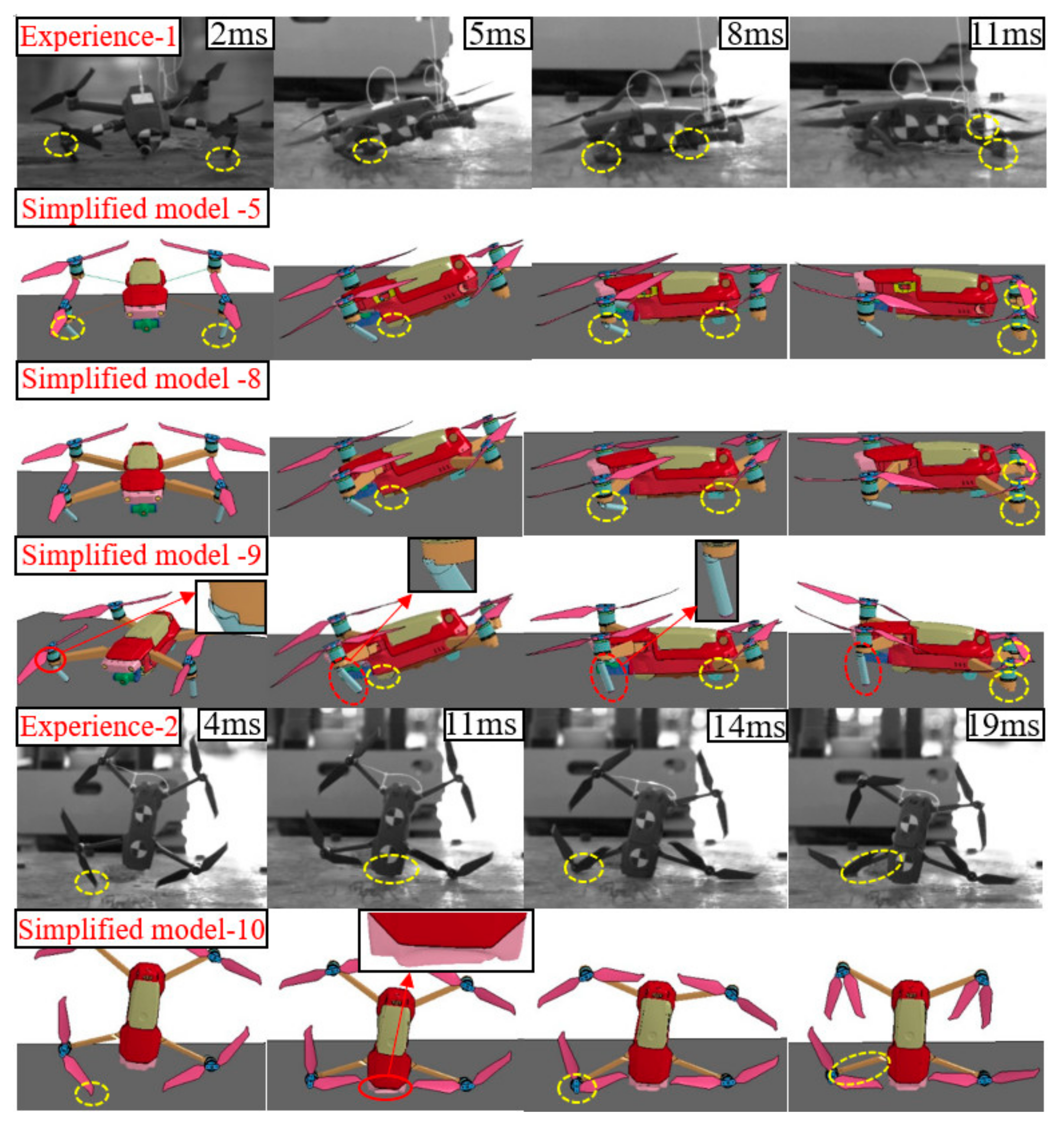
In the present section, the full-size model built was verified at the component-level and the complete machine-level by the above four tests. It was mainly verified from the three aspects of drone deformation response, impact load peak error and impact load change trend. With the high-speed camera, the complete deformation response process of the drone could be clearly suggested, and the deformation response was extracted at several typical moments for comparison with the simulation calculated results.
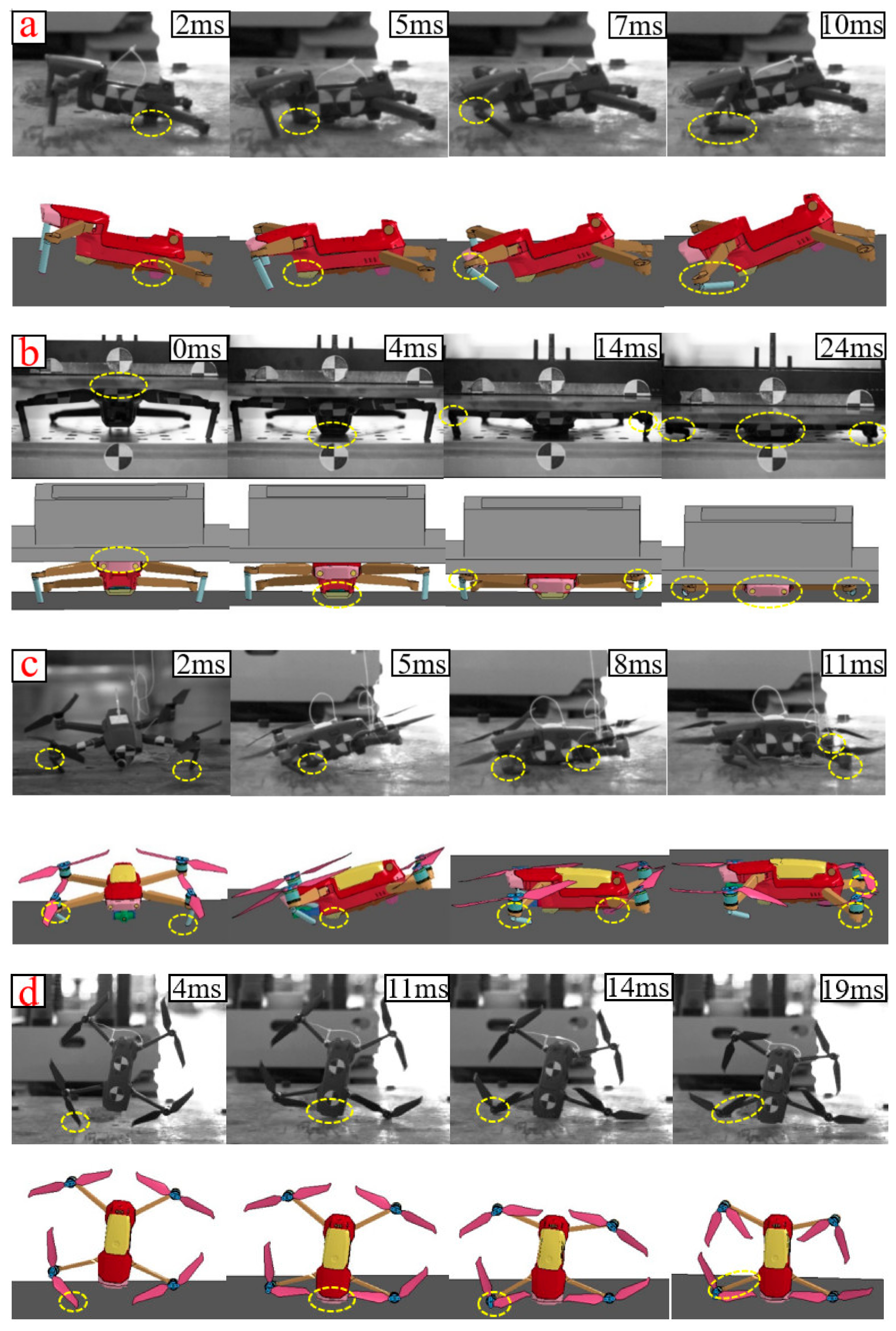
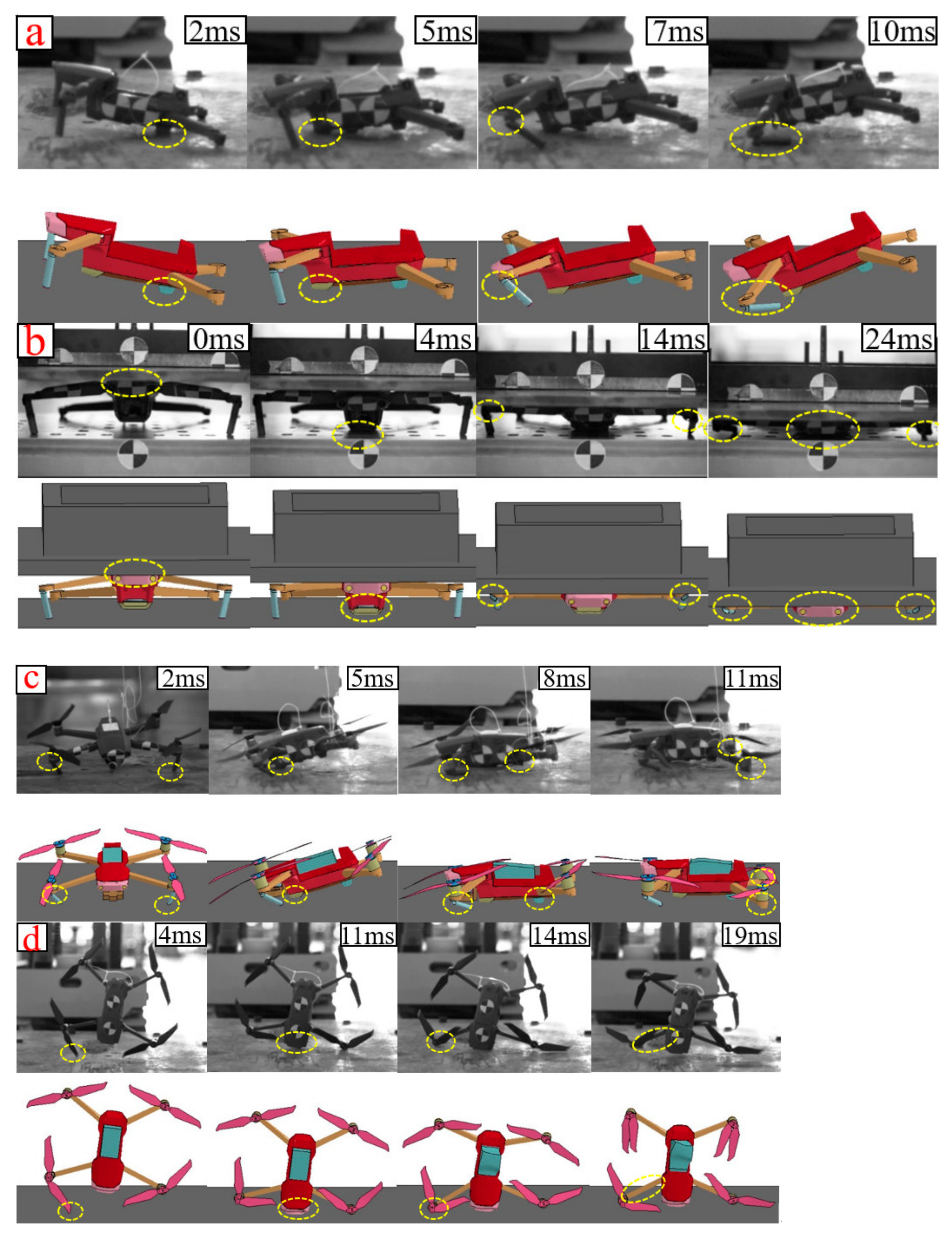
Figure 6 respectively shows the comparison results of the deformation response and simulation calculation of drone at several typical moments selected in the four tests, and the main deformation characteristics of each typical moment are marked in the figure.
Figure 6a presents the compared result of the component drop test. At 2 × 10
−3 s, the bottom silicone pedestal of the drone completely landed, corresponding to the maximum impact load; at 5 × 10
−3 s, the protective plate at the front of the bottom plate completely grounded; at 7 × 10
−3 s, the connection between the left front straight arm and the support arm began to fracture; at 10 × 10
−3 s, the connection was completely disconnected, while the fuselage rebounded from the ground.
Figure 6b presents the compared result of the component drop-weight compression test. At 0 × 10
−3 s, the drop hammer first pressed on the upper part of the front fuselage; at 4 × 10
−3 s, the protective plate at the front of the bottom plate touched the ground; at 13 × 10
−3 s, the two connections between the front straight arms and the support arm began to break; at 23 × 10
−3 s, the front shroud of the fuselage fell to the ground, the two connections were overall broken, while the load was close to the peak.
Figure 6c gives the comparison result of the complete machine positive posture drop test. At 2 × 10
−3 s, the connection between the left front straight arm and the support arm began to break and the right forearm touched the ground; at 5 × 10
−3 s, the protective plate at the front of the bottom plate landed; at 8 × 10
−3 s, the bottom silicone pedestal of the drone completely landed, while the load reached its peak; at 11 × 10
−3 s, the arm landed.
Figure 6d illustrates the compared result of the complete machine vertical posture drop test. At 4 × 10
−3 s, the left front propeller landed, while the right front propeller landed and rebounded; at 11 × 10
−3 s, the front shroud of the fuselage landed completely, and the impact load reached its peak; at 14 × 10
−3 s, the motor of the left front arm touched the ground; at 19 × 10
−3 s, the drone had completely bounced from the ground, while the left front arm began to turn back. After the comparison, the simulation results of deformation response at typical moments extracted in each verification comparison were well consistent with the test results.
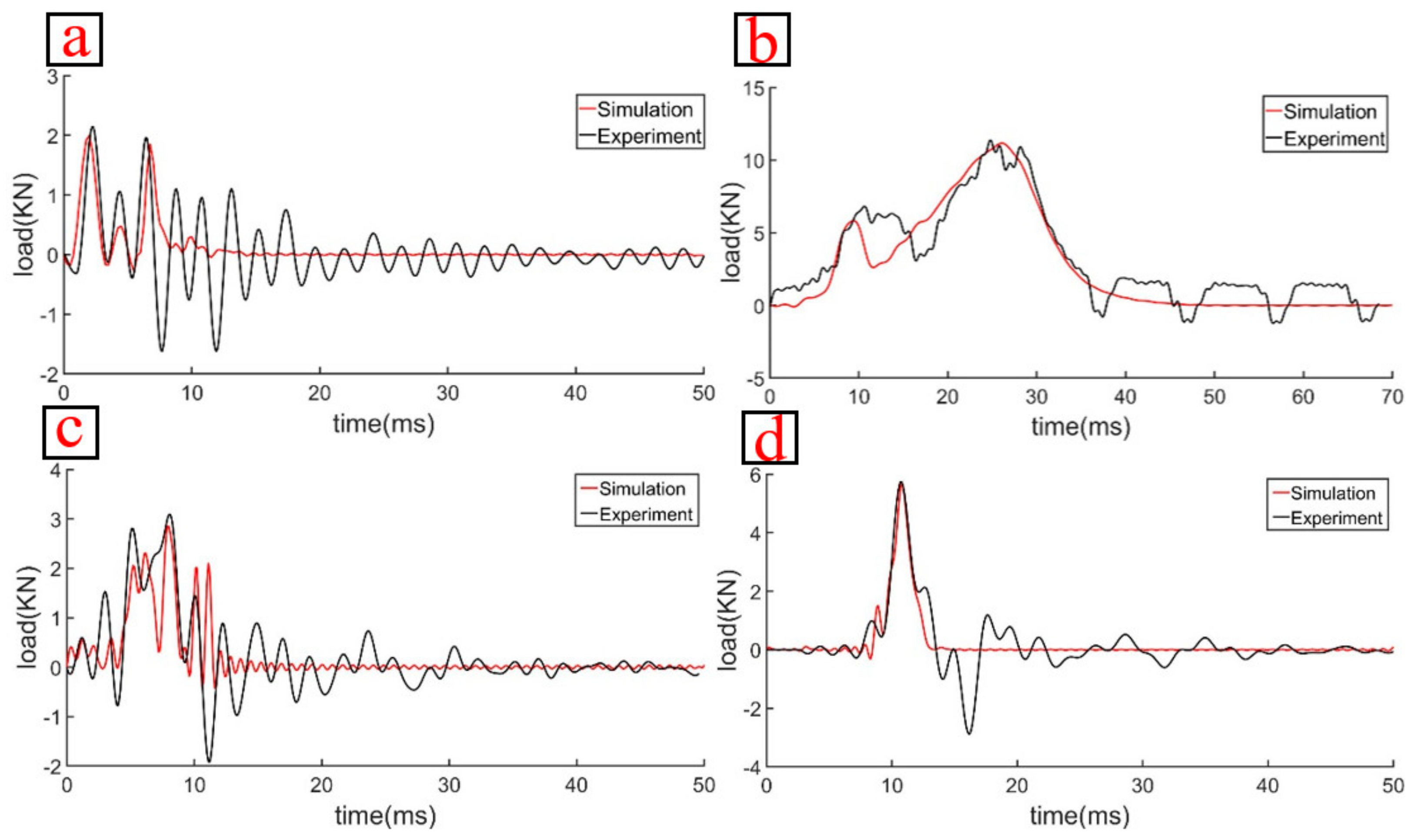
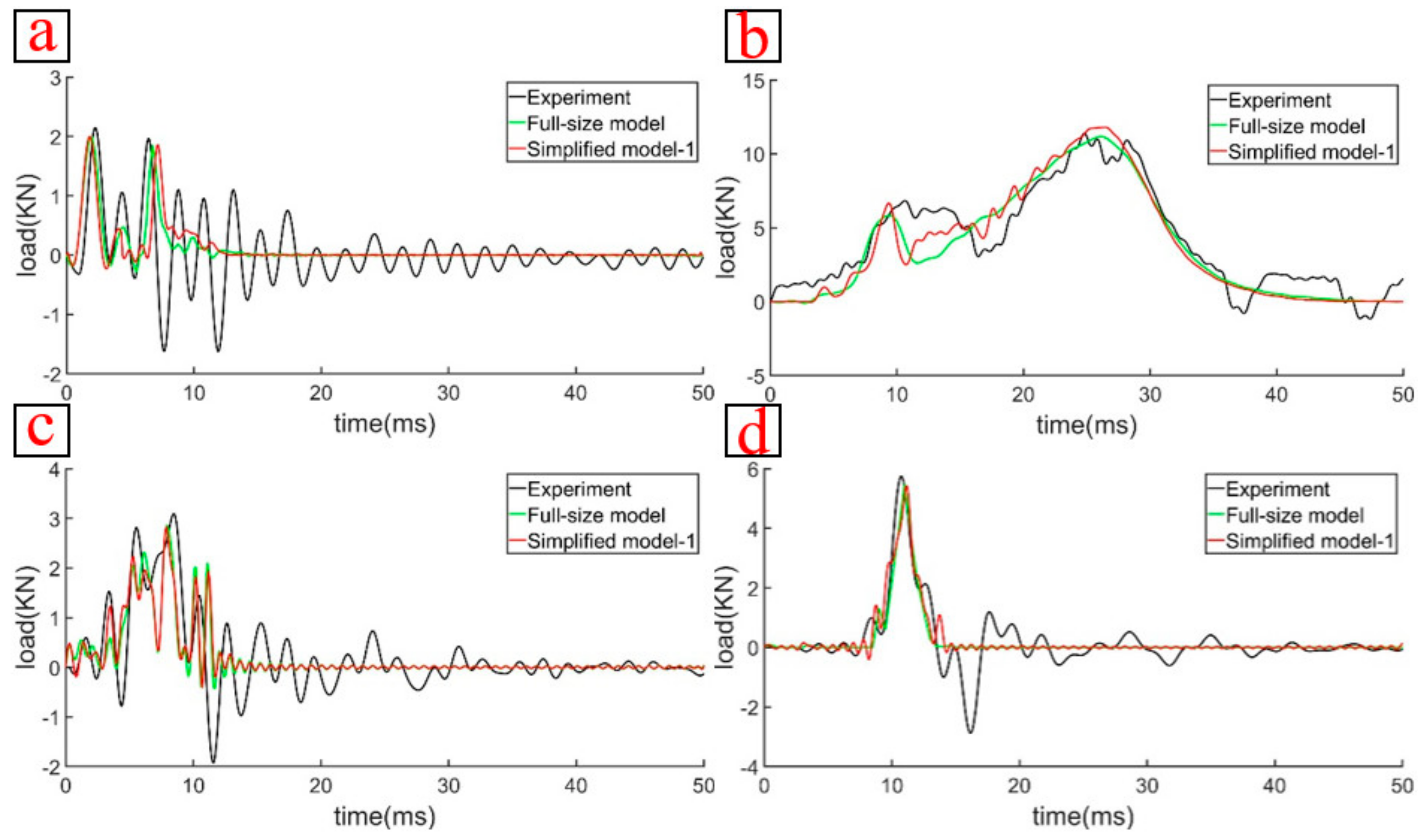
Figure 7 shows the comparison results of the impact load curve of the four tests and the impact load curve obtained by simulation calculation. As indicated from the figure, the load change trend of each simulation calculated result has a high consistency with the test in the impact phase, and it shows that the stress condition of each part of the full-scale finite element model built during the collision is basically consistent with the stress condition of each part of the real physical model of the drone. At the same time, it can be seen from the figure that there is a certain difference between the simulation calculation result and the test in the second half of the whole response process, such as the load curve after 8 × 10
−3 s in
Figure 7a. The reason is that the drone has completely rebounded from the force measurement platform in the second half of the response process. For example, the drone has completely separated from the force measurement platform at 10 × 10
−3 s in
Figure 6a. At this time, the rigid board in the simulation calculation has no contact with the drone, so the contact force is 0; while the force measurement platform in the experiment is still in a state of vibration, and the amplitude is gradually reduced to 0. Therefore, there is a certain difference between the simulation calculation result and the experiment in the second half of the response process.
The peak load and peak load error results of each experiment and simulation calculation analysis are listed in
Table 6. As revealed from the results, compared with the experiment, the error of each group of simulation calculated results was less than 10%, satisfying the general permitted range (≤15%).
In brief, a comprehensive comparison between the simulation calculated results and the experiment was drawn from the deformation response at the typical time, impact load change trend and impact load peak error of the drone. As suggested from the results, the simulation results were tightly correlated with the experimental results. Accordingly, the built drone full-size finite element model can be considered to be accurate, the model refers to a full-size high-precision model, and the drone full-scale high-precision modeling method adopted is reasonable.
3.4. Simplified High-Precision Modeling Method for Light and Small Drone
To reduce the difficulty of modeling, the finite element model solution scale and the consumption of resources (e.g., computing time), this chapter presented some specific simplified modeling modes and simplified modeling methods. By ensuring certain or equivalent calculation accuracy, the light and small drone studied here was modeled in a simplified method. Lastly, a simplified high-precision finite element model of the drone was built, and the simplified conditions and the simplified methods for modeling similar light and small drones were formed.
According to the structural characteristics of the drone, this study proposed the following five simplification modes:
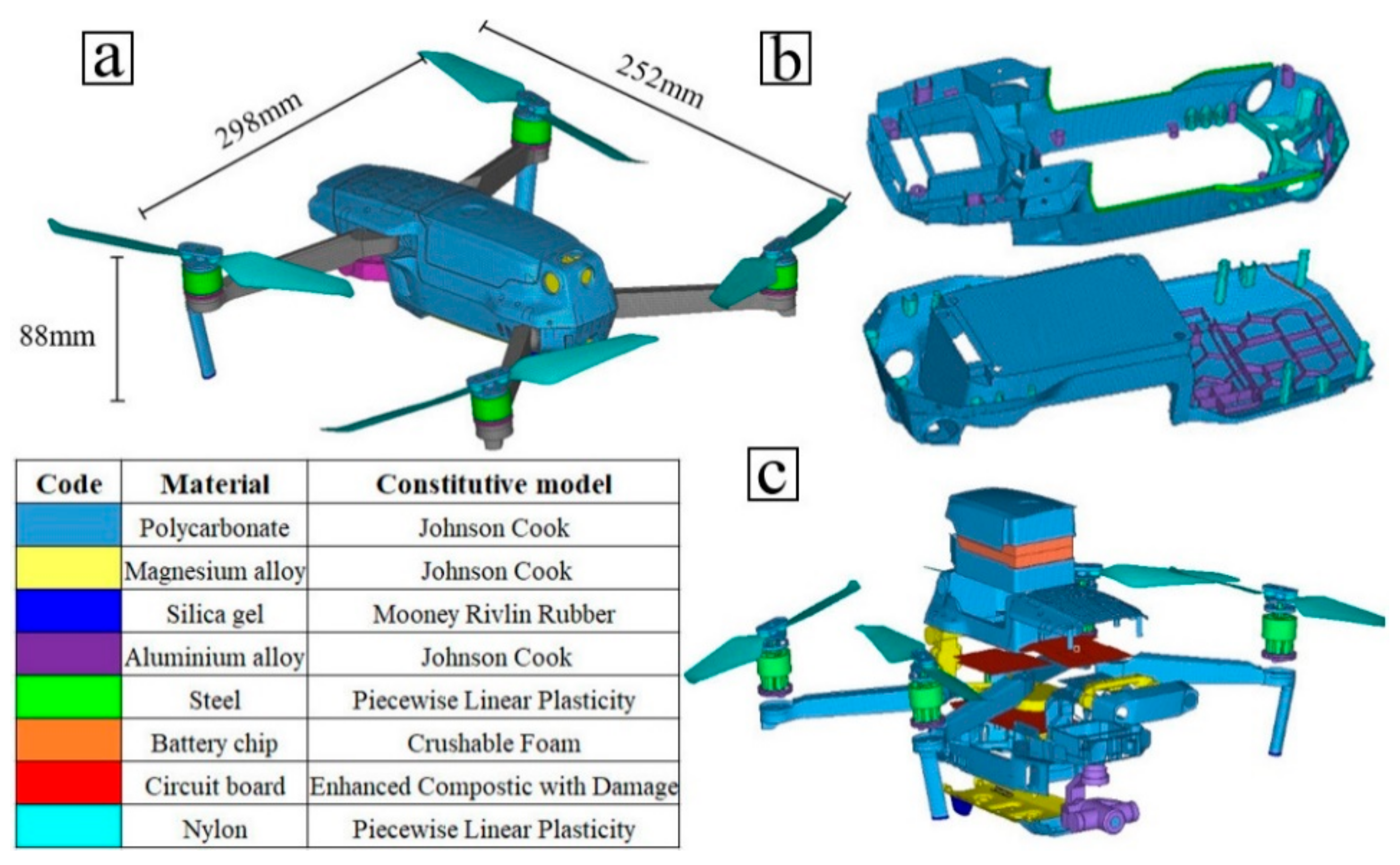
(i) Material model. It covered simplified modeling of anisotropic materials and material replacement. The material model of anisotropic materials was simplified and modeled with the isotropic constitutive model of equal density. Material replacement was conducted for the simplified parts during the modeling, and the material model was no longer defined separately for some mesh elements corresponding to the simplified parts.
(ii) Normal thickness. As impacted by the complex structure or structural requirements, the normal thickness of thin-walled parts in the drone was not uniform, significantly increasing the difficulty of regional modeling. In the present study, the finite element model of thin-walled parts with uneven normal thickness was simplified to a finite element model with uniform thickness as a whole to reduce the difficulty of modeling, whereas it aims to ensure the weight of each part to equal to the full-size model.
(iii) Appearance characteristic. For parts with curved surfaces, holes on the surface and ribbed structures inside, the detailed internal and surface structures were ignored, and the geometric model was simplified to a straight and similar geometry. Accordingly, the difficulty of modeling was reduced from the process of building the geometric model, and the difficulty of meshing decreased.
(iv) Element type. In the full-scale model, the geometric structure features of each part were overall restored by complying with the real structure. To reduce the difficulty of modeling, in the simplified model, the modeling element type of some parts or components of the drone was replaced (e.g., to simplify modeling of parts similar to straight rods in the structure through beam elements (full-scale models use shell elements), as well as to simplify the thin-walled parts modeled by shell elements to other parts with solid elements for overall modeling). Accordingly, the difficulty of meshing decreased, the solution scale of the finite element model was reduced, and the calculation time was saved.
(v) Combined modeling. The components in the drone were composed of multiple parts, and each part was modeled separately in the full-scale model. During the simplified modeling, multiple parts in the identical component were simplified into a whole, and the component was simplified modeled as an integrated combined model according to its geometric shape to reduce the number of parts and the difficulty of modeling.
During the fall of the drone, the factor most significantly impacting the impact load was the kinetic energy of drone. When the impact speed was constant, the weight remained unchanged and the overall kinetic energy of the drone remained unchanged. Thus, in all the mentioned simplification methods, equivalent density modeling was adopted for the simplified model to ensure that the weight of each simplified part or component is equal to the full-size model. Moreover, it is required that the geometric position of the parts or components of the simplified model remained unchanged from the original model to ensure that the overall center of gravity and the momentum of inertia of the drone changed slightly. The comparison of the total weights between the real, and the modeled drones is shown in
Table 7.
In the present study, according to the different properties of each part or component of the drone, the corresponding simplified modeling modes were selected, and the specific simplified modeling method for parts or components with different properties was formed, and the single simplified model was built with different simplified methods. The respective part or component of the drone exhibited multiple properties simultaneously, and a certain crossover was identified between different simplification modes. Thus, each simplification method might include multiple simplification modes. Combining the mentioned simplified modeling ideas, the simplified conditions and simplified modes table was built (
Table 8), in which the properties and simplified modes of the main parts or components of the drone were selected, respectively. Simplification modes fell to main simplification modes and secondary simplification modes. The main simplification mode was the simplification mode largely used in the simplification method of different parts or components; the secondary simplification mode was the simplification mode involved in the application of the main simplification modeling mode to simplify the modeling.
For the connection structure between different parts or components in the drone, the connection structure contained in the simplified component has been simplified during the simplified modeling of each component, and the connection structure that has not been simplified is still constructed by complying with the real structure. In this research, we will not conduct a separate detailed simplified modeling study on the connection structure. The specific simplified modeling method and the built single simplified model for different parts or components in the drone are as follows:
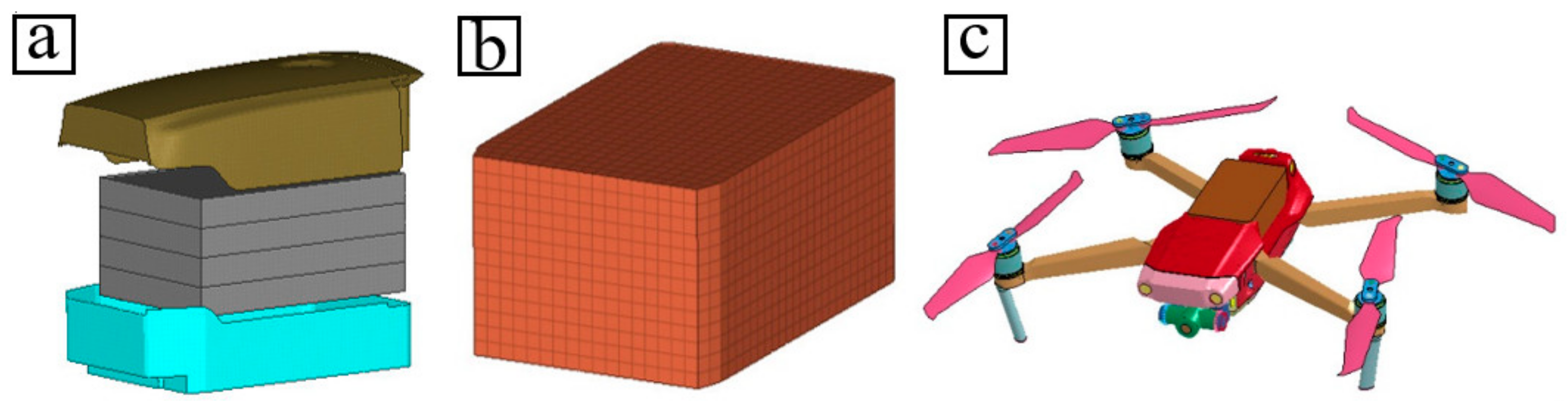
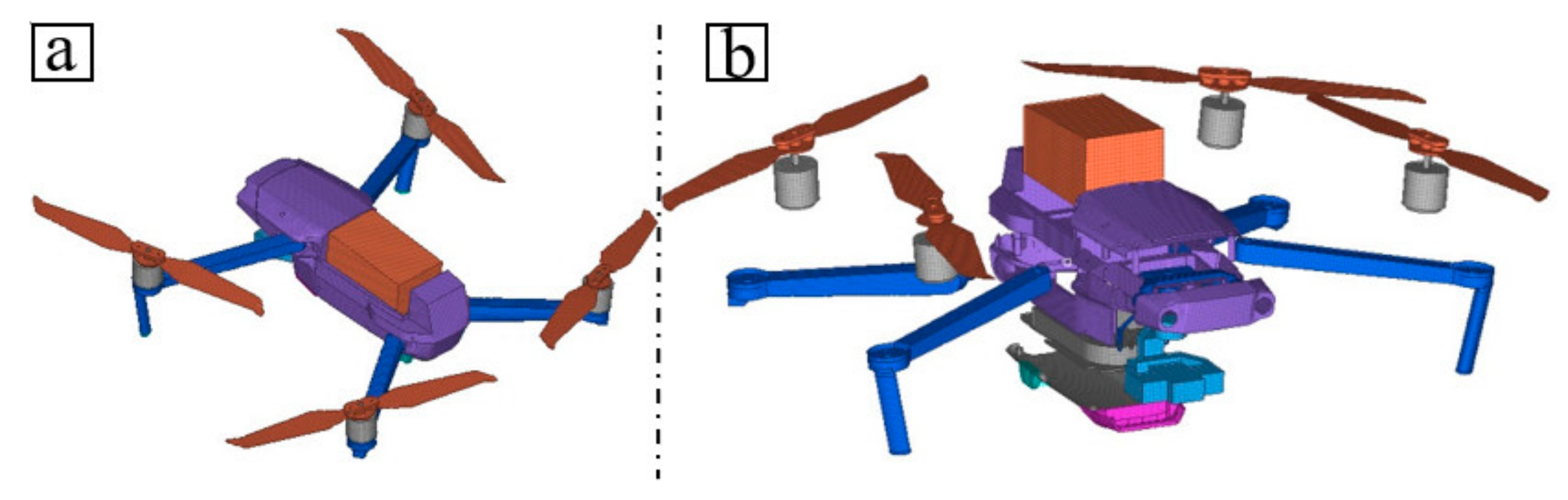
3.4.1. Method 1: Simplified Modeling of Battery
The primary battery of drone consisted of two parts, that is, a battery box and a battery cell. The battery box is an isotropic polycarbonate material; while the battery cell is a lithium-ion polymer battery, that is, a non-single material equivalent to anisotropic materials. Accordingly, the two materials in the battery are soft in texture, the battery as a whole is an elastomer, and the total weight of the battery is 293 g, that is, a centralized mass in the drone.
In the full-size high-precision model, the battery box and the battery cell were separately modeled by the shell element and the solid element, and the external geometric features and internal structural features of the battery box were modeled specifically. As shown in
Figure 8a. In the simplified model, the appearance characteristics of the battery box were simplified, the battery box and the battery cell were combined into an overall model, and the model was modeled by solid elements, as shown in
Figure 8b. Ensure that the simplified battery model is installed in the original location and establish the simplified model-1, as shown in
Figure 8c. The material of the simplified model was simplified to isotropic compressible soft material, and the equivalent density is calculated based on the volume, and other parameters are taken from literature [
29,
30]. In summary, in the simplified battery modeling, combined modeling and material model simplified modeling modes are mainly used, and the simplified modeling modes of appearance characteristic and element type are also included.
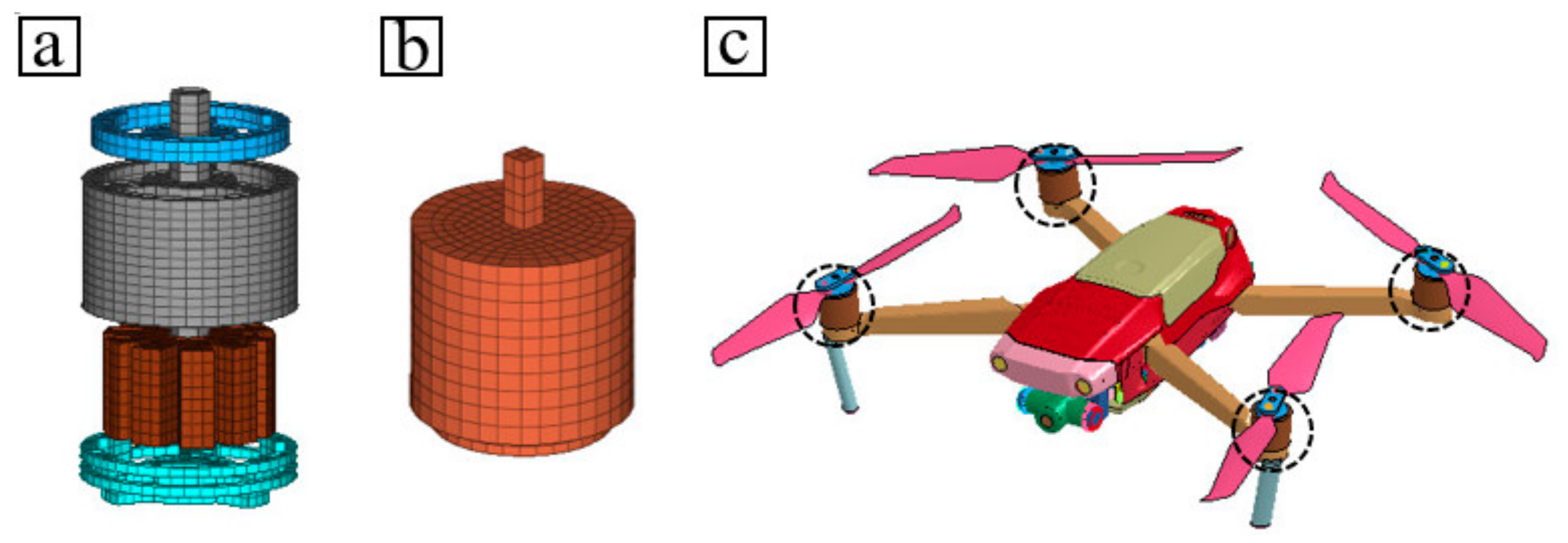
3.4.2. Method 2: Simplified Modeling of Motor
The drone motor consists of four parts, that is, a motor base, a rotor, a stator and an upper cover; the motor base and the upper cover are made of aluminum alloy, and the rotor and stator materials are equivalent to high-strength structural steel, both of which are isotropic materials. Thus, the motor as a whole acted as a rigid body, that is, a centralized mass in the drone. In the full-size high-precision model, the four parts of the motor were separately modeled, and the geometric structure characteristics of each part were retained, as shown in
Figure 9a. In the simplified model, the four parts of the motor were combined into a solid overall model by complying with the overall geometric shape of the motor, and the solid element was used to model it (
Figure 9b). It was ensured that the simplified motor model was installed in the original location, and the simplified model-2 was built (
Figure 9c). Since the rotor and stator in the motor took up a relatively large proportion, the simplified overall model material employed high-strength structural steel. In the simplified modeling of the motor, the simplified method of combined modeling was largely applied.
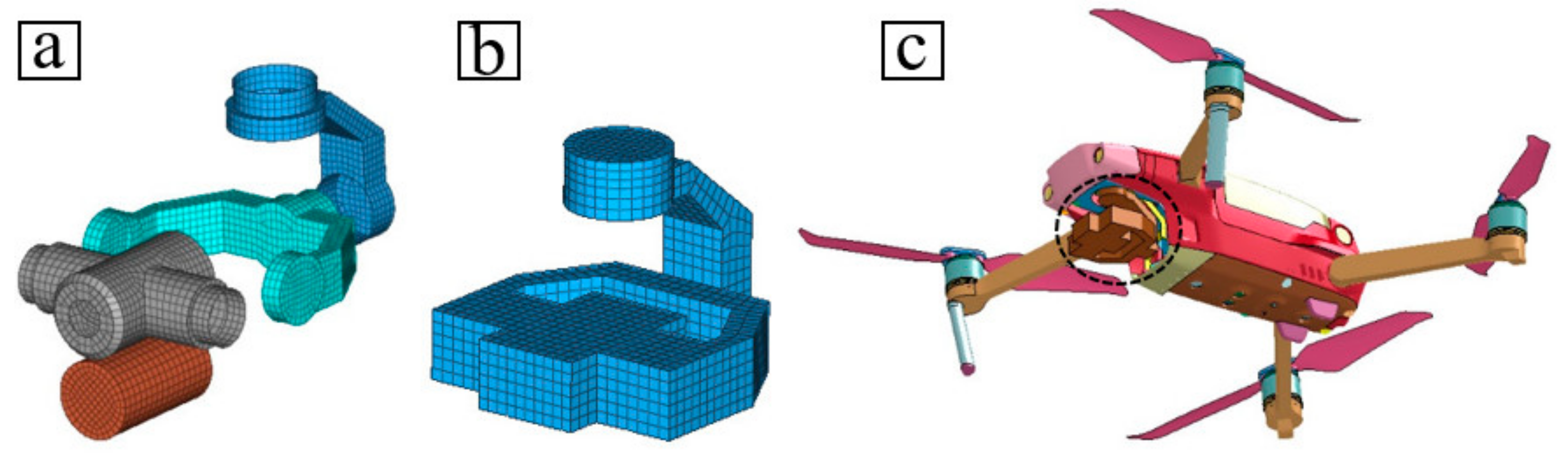
3.4.3. Method 3: Simplified Modeling of Camera Gimbal
From bottom to top, the drone camera gimbal consisted of four parts, that is, a camera lens, a camera case, a horizontal frame and a vertical frame. The full-size model is illustrated in
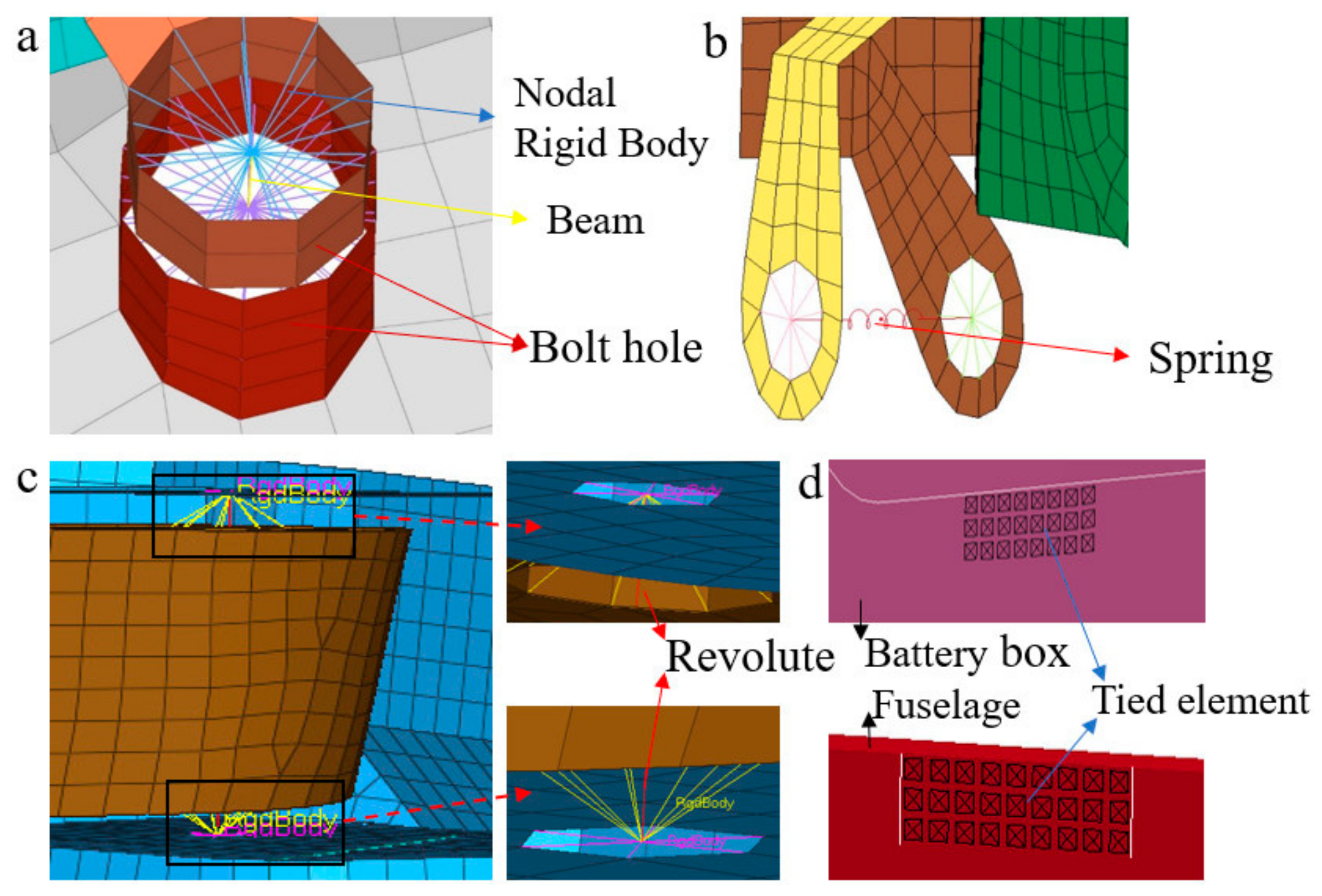
Figure 10a. The camera lens was composed of anisotropic circuit materials and a plastic shell, tightly connected as a whole, which was modeled as a whole in a full-size model. In the full-size high-precision model, the camera case, horizontal frame and vertical frame were all hollow parts of high-strength aluminum alloy. Accordingly, the camera gimbal pertains to a rigid centralized mass. The connections of the camera gimbal were all connected with a micro-motor and could be rotated freely without power on. In the full-size model, the connection between the parts was modeled by revolute joint.
In the simplified model, the camera gimbal was modeled by solid elements by following its overall basic outline, simplifying the shape features of each part, while only retaining the positional relationship. The simplified model is presented in
Figure 10b. During the simplified modeling, the connection relationship of the revolute joint was simplified simultaneously, and the built simplified model-3 is presented in
Figure 10c.
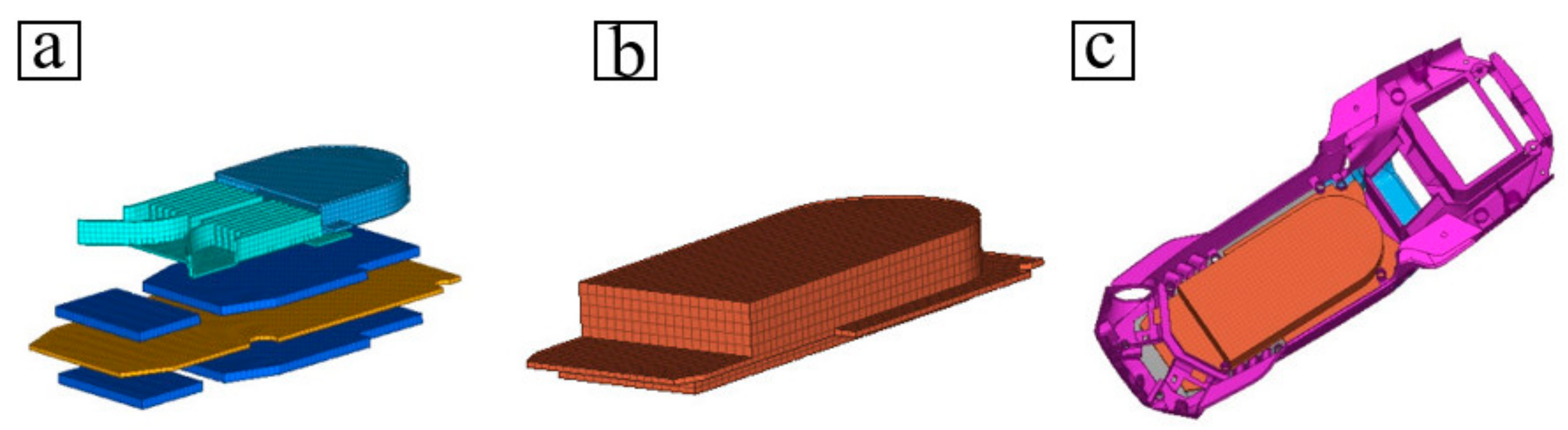
3.4.4. Method 4: Simplified Modeling of the Circuit Board
The drone circuit board consisted of the Printed Circuit board (PCB), electronic components, fans and heat sinks; each part acted as a thin-walled part. The full-size model is shown in
Figure 11a. On the whole, PCBs in the consumer industry are made of glass fiber-epoxy composite laminate covered with a copper layer, that is, a typical anisotropic composite material, and other parts are made of alloy. In the full-size high-precision model, each part was simplified to a certain extent, whereas each part remained modeled separately, and the geometric structure characteristics of each part were maintained. For capacitors and wires on the circuit, they were added to the circuit board as a non-structural weight. In the simplified model, the circuit board was modeled as a whole with the solid element by following its overall outline, and the peripheral dimensions and installation position dimensions remained unchanged to ensure that the simplified model could be correctly installed in the original position. The simplified model of the circuit board is presented in
Figure 11b, and the installation in the fuselage is shown in
Figure 11c, and the simplified model-4 of the drone was built. In this drone, only the circuit board is an anisotropic material structure, but because the weight of the circuit board is very small (only 3% of the total weight of the drone), and it is an internal non-load-bearing structure. Therefore, we simplified its materials by isotropic simplification, and combined with electronic components, fans and heat sinks and other metal material structures to establish an overall isotropic combination model. The density in the material constant is the equivalent density of the combined model, and the other material constants are taken as the stronger magnesium alloy material constants in the combined model, and the failure model is also given with reference to the failure mode of the metal material.
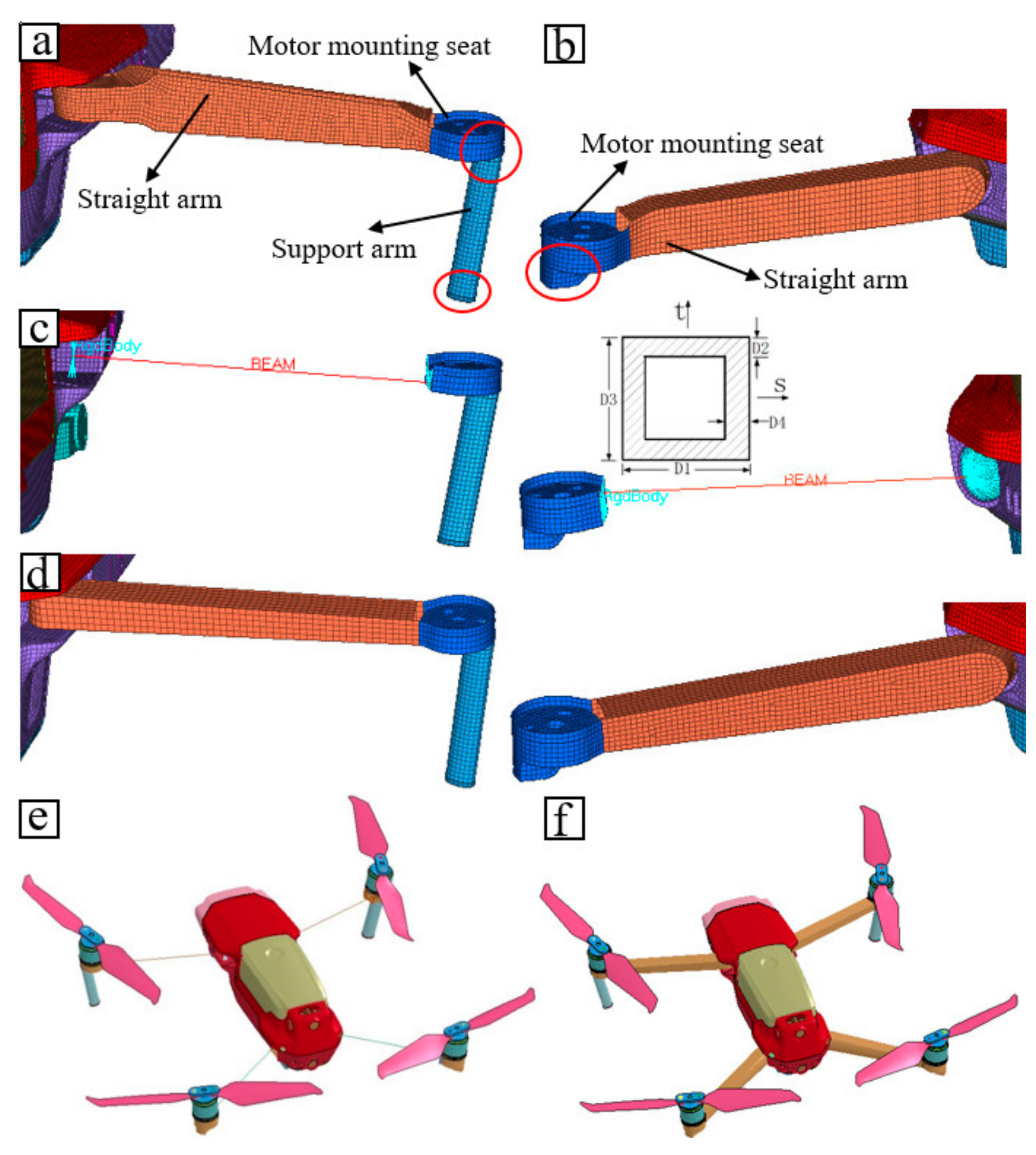
3.4.5. Method 5 and Method 6: Simplified Modeling of the Arm
The drone arm fell to a front arm and a rear arm. The structures of the two were similar but not identical. The front arm consisted of three parts, that is, a straight arm, a motor mounting seat and a support arm; the rear arm consisted of two parts, that is, a straight arm and a motor mounting seat. All parts of the arm were hollow thin-walled parts, so the full-size model was modeled by shell elements. The full-size models of the front arm and rear arm are shown in
Figure 12a,b, respectively. The arm was a peripheral part of the overall fuselage structure, in which the straight arm acted as a connection, the motor mounting seat was used to install the motor, and the support arm was employed as a support for the fuselage. During the fall, the drone arm was vulnerable to impact. The motor mounting seat and support arm included the main impact damage positions in the mentioned drop test, which were the vulnerable parts.
The relatively complicated part of drone arm modeling was the geometric modeling and meshing of the straight arm, and the normal thickness of each part of the straight arm was not uniform. According to the structural characteristics of the arm, only the straight arm was simplified during the modeling. The structure of the straight arm was consistent with the hollow rod. This study developed two simplification methods for the simplification of the straight arm, that is, Method 5 and Method 6.
Method 5: The straight arm was modelled by beam elements of uniform thickness. The specific method: The nodes of the fuselage connected with the straight arm and the motor mounting seat were linked to the geometric center node via the Nodal Rigid Body, and then the center nodes of the two parts were connected via the beam element. The cross-sectional shape of the beam element used was a hollow square tube. The built arm model and beam element cross-sectional schematic diagram are shown in
Figure 12c, where the front arm dimensions reached D1 = 12 mm, D2 = 1.8 mm, D3 = 12 mm, D4 = 1.5 mm, and the rear arm dimensions were D1 = 8 mm, D2 = 1.5 mm, D3 = 15 mm, D4 = 1.5 mm. In such a simplified modeling method, the element type simplification mode was largely applied, and the normal thickness and appearance characteristic simplification mode was employed as well. The built simplified model of drone Simplified model-5 is illustrated in
Figure 12e.
Method 6: The modeling of the structural features of the straight arm part was simplified. The specific method: the irregular geometrical part of the straight arm was removed, and the equal straight surface modeling was used, whereas the connecting sections of the straight arm, the fuselage and the motor mounting seat were ensured to be complete; uniform normal thickness modeling was used in the simplified model. In this simplified modeling method, the simplified method of appearance characteristic was largely applied, and the normal thickness was employed as well. The simplified model of the arm is shown in
Figure 12d. The connection between the simplified arm and the fuselage remained unchanged, and the simplified model-6 of the drone was shown in
Figure 12f.
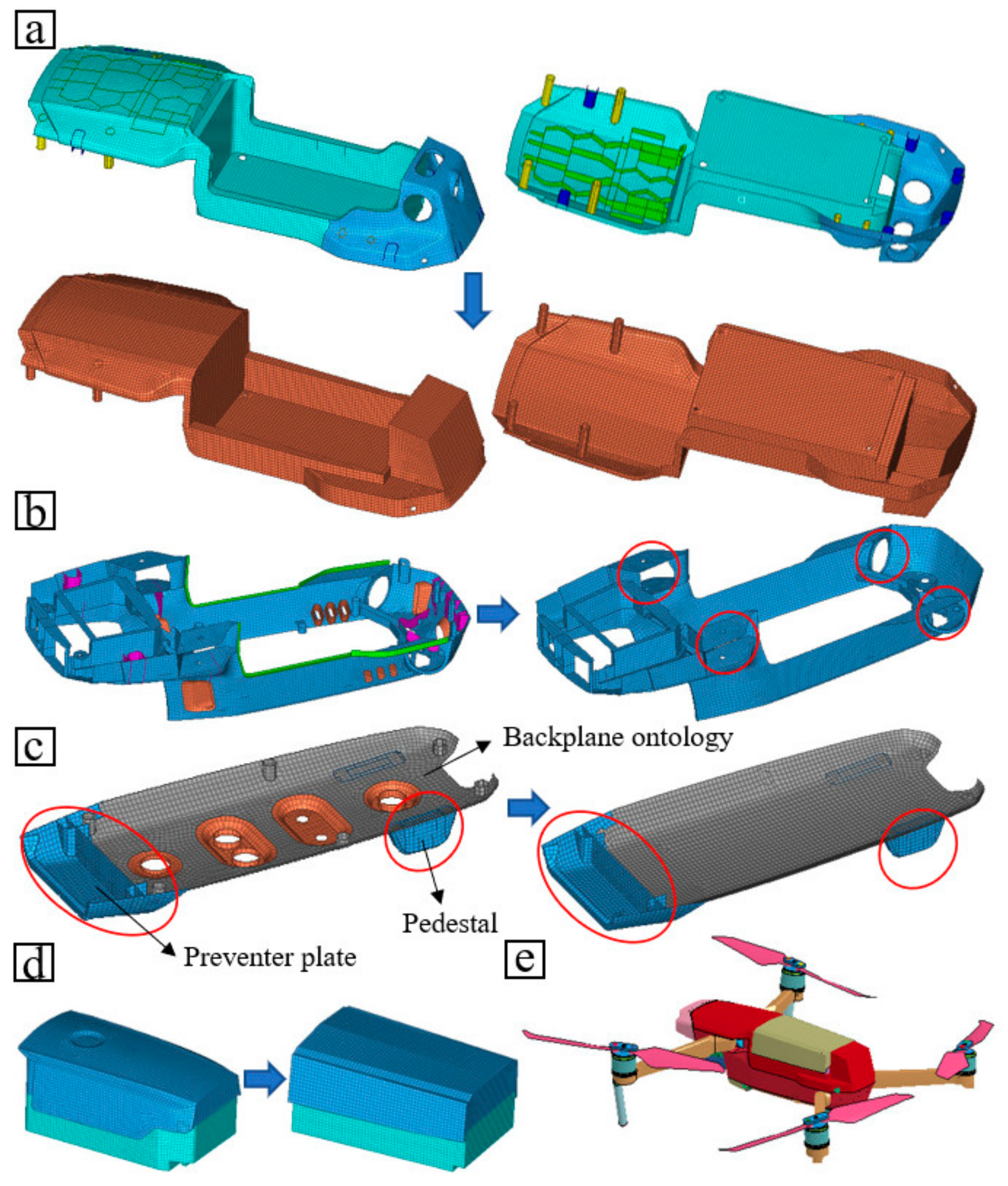
3.4.6. Method 7: Fuselage Case
The fuselage case consisted of an upper fuselage, a lower fuselage, a bottom plate and a battery box. All these components were thin-walled parts with uneven normal thickness. The surface of the fuselage case was mostly curved. To meet the functional requirements of the drone, there were different irregular grooves and holes on the surface of the drone fuselage. To satisfy the structural strength requirements of the drone fuselage and the precise installation requirements between different parts, the inner surface of the fuselage was installed with stiffeners, positioning grooves and bolt connection hole structures at multiple places. All parts of the fuselage case acted as the isotropic bodies, the backplane ontology was made of magnesium alloy, and the rest was made of polycarbonate. In the full-size model, the fuselage surface and internal detailed structure were modeled specifically by complying with the real structure of each part, and the mesh elements fell to regions and the section properties were defined by complying with the real thickness of different positions. A full-size model was difficult to model. Each curved surface and internal details should be accurately reverse modeled during 3D reverse modeling and fall to mesh elements satisfying the quality requirements during meshing.
To reduce the modeling difficulty and save the modeling time, the modeling for each part of the fuselage case was simplified. In the simplified model, two simplified modeling modes of normal thickness and appearance characteristic were adopted for each part to simplify modeling. Next, the specific simplification method of each part was elucidated separately:
The upper fuselage: For the curved case, the straight-face modeling was conducted according to its outer contour; the front-end stiffener ribs, the front and rear positioning grooves and the sensor hole at the rear of the fuselage were simplified and then removed.
Figure 13a draws the comparison between the full-size model of the upper fuselage and the simplified model.
The lower fuselage: The connection structure of the fuselage was mainly concentrated in the lower fuselage, so the internal structure of the lower fuselage was mainly simplified. In terms of the connection structure of the lower fuselage, only the connection structure of the front arm and the rear arm were retained, as marked in the figure, and other structures were simplified. In the full-size model of the lower fuselage, the cooling holes, air intake holes and sensor holes on the side and rear surfaces were modeled specifically. In the simplified model, the mentioned detailed structures were simplified, and the outer surface of the lower fuselage was modeled through a straight plane. The full-size model and simplified model of the lower fuselage are presented in
Figure 13b.
The bottom plate: The bottom plate consisted of a pedestal, a front protective plate and a backplane ontology. To be specific, the pedestal and the front protective plate acted as the main impact parts in the mentioned drop test. They were not simplified during the simplified modeling in the present section and were discussed in the next section. For the backplane ontology, the sensor mounting holes on the surface of the bottom plate and the bottom plate connection holes were all simplified, and the backplane ontology was simplified and then modeled as a straight plane. The full-size model of the bottom plate and the simplified model are illustrated in
Figure 13c.
The battery box: The battery box simplified the curved surface into straight surface by complying with its basic contour line, whereas the battery cell was ensured to be correctly installed in the battery box. The full-scale model and simplified model of the battery box are shown in
Figure 13c.
After simplifying the modeling of each part with the mentioned specific simplification method, the simplified model of each part was assembled together to build simplified model-7, as shown in
Figure 13d.
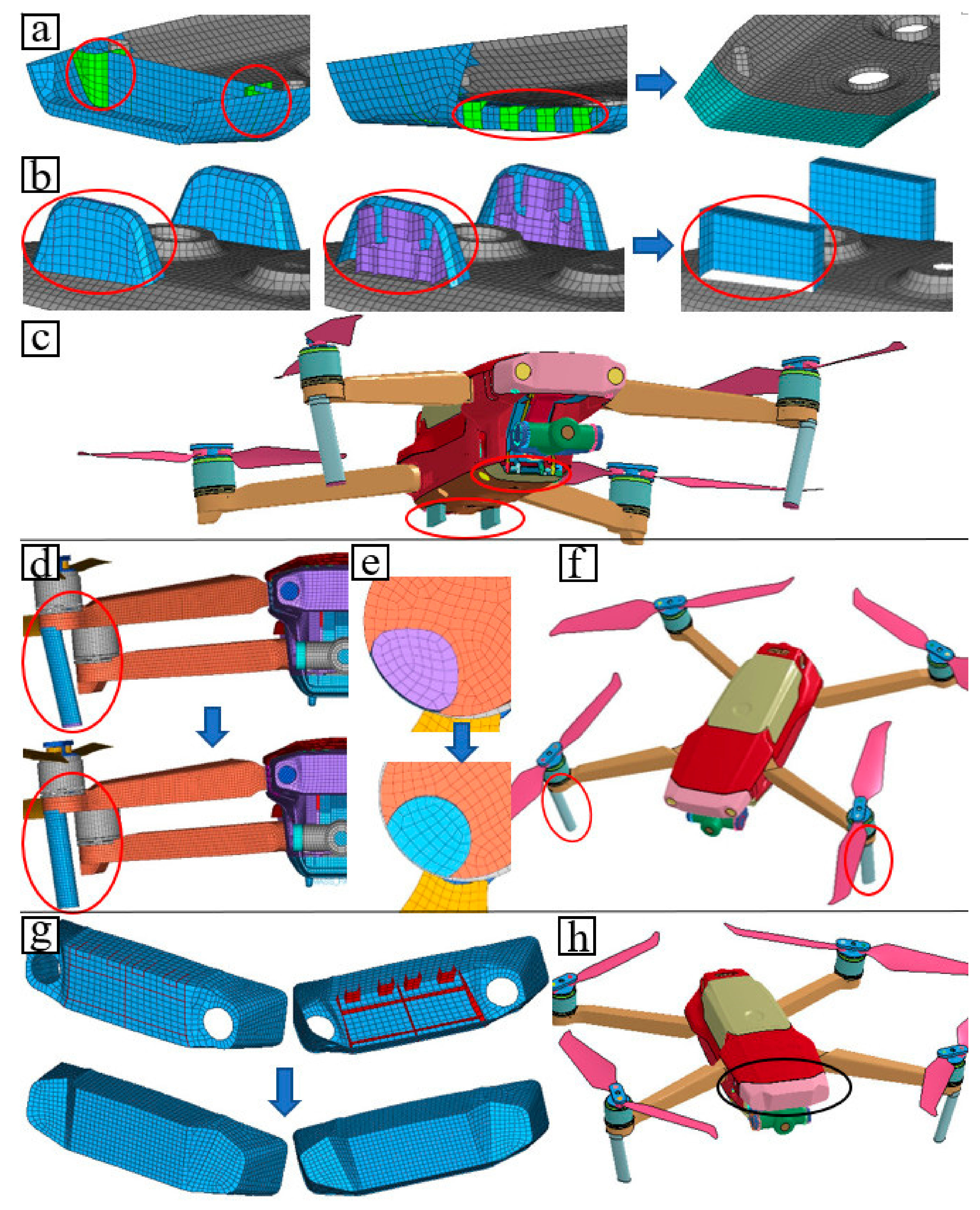
3.4.7. Method 8: Simplified Modeling of Impact and Damage Parts
Combining the mentioned component-level and complete-machine-level drop tests, the three main impact positions of the drone during the fall were classified, that is, the protective plate at the front end of the bottom plate, the pedestal, and the front shroud of the drone fuselage; the support arm in the front arm of the drone was the main damage location of the fall impact. In the present section, simplified modeling for impact parts and damaged parts was specifically investigated, and different simplified models were built based on their locations and corresponding drop tests. The mentioned impact and damage parts were irregular thin-walled vulnerable parts exhibiting non-uniform thickness, so the simplified modeling was primarily conducted through two simplified modeling modes of normal thickness and appearance characteristic.
Simplified modeling of the protective plate and the pedestal: In the positive posture drop test, the protective plate and the pedestal represent the two peaks of the impact load at the moment they land, that is, the protective plate and the pedestal acted as the two main impact positions. In the full-size model, the inner and outer sides of the protective plate were presented with stiffener structures, the front edge displayed a crimping structure toward the inside, and the two sides of the protective plate were arcs. The pedestal was an integral structure with a curved surface containing internal complex supporting and stiffening ribs. From the structural perspective, the mentioned two parts were identified to be easy to impact positions at the design stage of the drone, so multiple reinforcement plates were installed inside. As impacted by the complexity of the structure, considerable time and energy were spent on 3D reverse modeling and meshing when a full-scale model was being built. In the simplified model, the complex internal reinforcement structure and the curved surface were not modeled specifically detail, whereas the straight surfaces were used to build a similar geometric appearance. Simplified modeling according to this method significantly reduces the difficulty of geometric modeling and meshing. The simplified process of the protective plate and the pedestal are illustrated in
Figure 14a,b, respectively. The built simplified model-8 is shown in
Figure 14c.
Simplified modeling of support arm: In the component-level and the complete machine-level positive posture drop tests, the support arm was the only position where damage occurred, and it was another impact position. In the full-size model, the support arm was modeled by 3D scanning. The support arm and the lower surface of the front arm had a certain angle (<90°), and its cross-sectional shape was approximately elliptical, and the mentioned dimensional data could not be acquired by measurement. In the simplified model, the support arm was modeled by stretching directly on the lower surface of the front arm. Its cross-section was a similar shape built by two arcs, and the support arm displayed a vertical relationship with the lower surface of the front arm.
Figure 14d presents the comparison result of the full-size model and the simplified model of the support arm position feature, and the comparison result of the cross-sectional shape of the support arm is shown in
Figure 14e. The built drone simplified model-9 is presented in
Figure 14f.
Simplified modeling of the front shroud: In the vertical posture drop test, the front shroud of the fuselage acted as the main impact position, representing the peak impact load. The front shroud had a curved shape as a whole, with sensor holes on both sides of the front end, and the stiffening rib structure on the inside. In the full-size model, the mentioned structures were modeled in detail. Each surface of the simplified model was modeled through the equal straight surface according to the original outer contour, and the sensor hole and rib structure were simplified. The full-size model and simplified model of the front cover are illustrated in
Figure 14g, and the built drone simplified model-10 is shown in
Figure 14h.
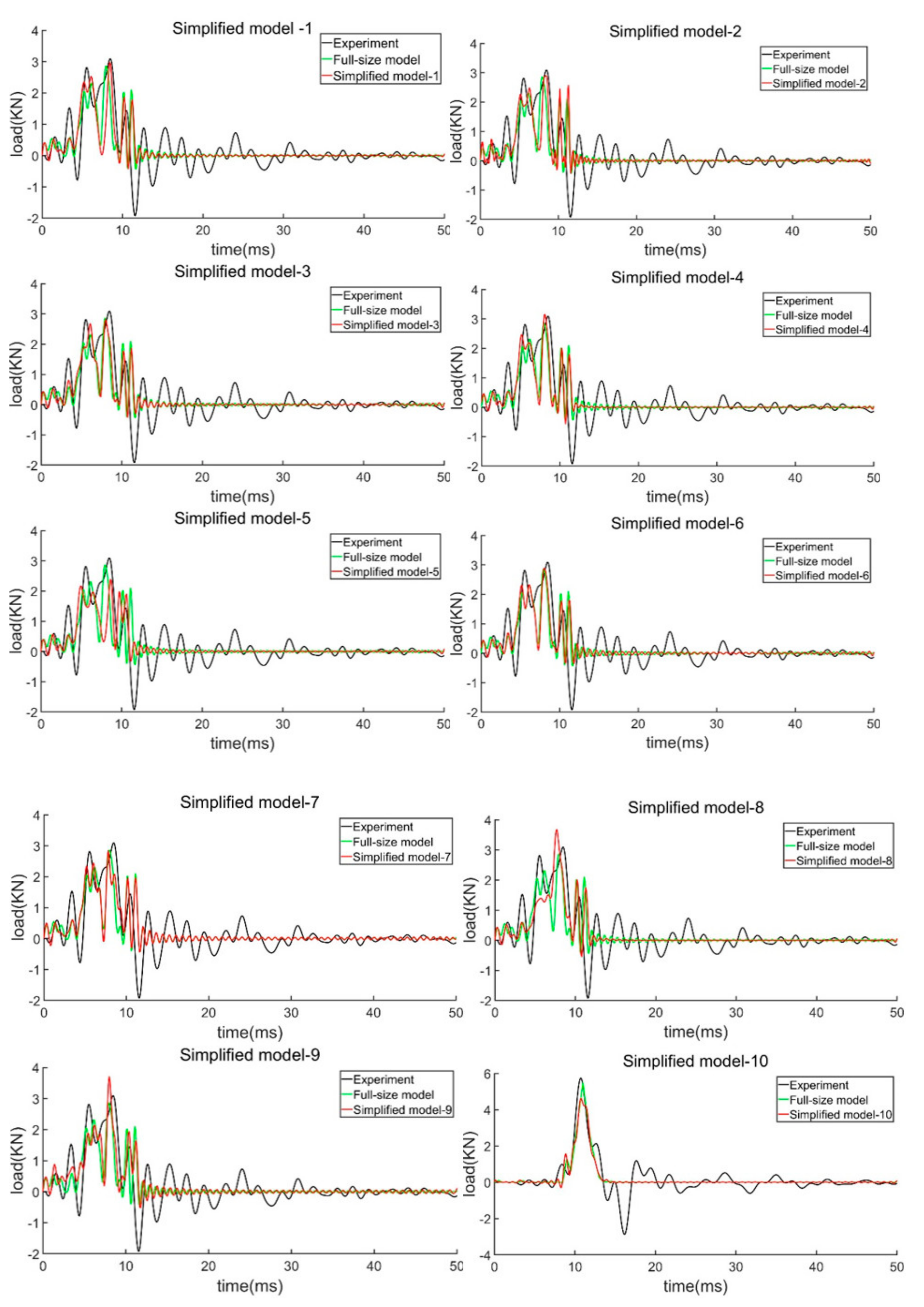
Simplified modeling has a premise of ensuring the calculation accuracy. Thus, the calculation accuracy of the built simplified model should be verified as well to illustrate the rationality of the proposed simplification mode and simplification method. The verification of the simplified model was also verified from three aspects, that is, the deformation response of the drone, the peak error of the impact load, as well as the change trend of the impact load. Since the simplified model was used here, the calculation accuracy of the model would inevitably be affected. Accordingly, a novel verification method was proposed for the simplified model, that is, the deformation response and impact load change trend of the simplified model could be consistent with the test results; especially for the impact load peak error, a new method was proposed here to determine the peak load error of impact load with the common method of identifying the peak load error in crash simulation analysis.
According to the method to determine the impact load peak error used by Li et al. [
35] in their study on bird impact and nonlinear dynamic response, it was considered that the general permitted range of the impact load peak error was ≤15%. The maximum value of peak load error between the built full-size high-precision model and the above four tests was 7.7% and the minimum was 2.2%, displaying a significant gap. If the general permitted range (≤15%) acted as the peak load error judgment method of the simplified model, the peak load error of the simplified model might increase exponentially as opposed to the full-size high-precision model, thereby causing the calculation accuracy of the simplified model to reduce significantly. Obviously, it is not applicable to use the general permitted range as a method to determine the peak load error of the simplified model.
To ensure the calculation accuracy, a more rigorous and accurate peak load error judgment method was proposed here by meeting the general permitted error range (≤15%). The allowable range of the peak load error of the simplified model and the above four tests increased in proportion to the peak load error of the corresponding full-scale high-precision model and the experiment. As a result, the allowable range of the peak load error of the simplified model and the above four tests increased in proportion to the peak load error of the corresponding full-size high-precision model and experiment. Specific strategy: the peak load error between the full-scale high-precision model and the test results was recorded as A, and the peak load error between the simplified model and the test results was recorded as A (> 0 and A ≤ 15%). Combining the general permitted error range in the nonlinear dynamic response simulation analysis and the peak load error results of the above full-size high-precision model and test, = 1.5 was set.
The strategy to determine whether the simplified model is a high-precision model was elucidated as: the deformation response and impact load change trend of the simplified model could comply with the test results; based on the impact load change trend and the deformation response at the typical time consistent with the experiment, if the peak load error of the simplified model was not more than 1.5A, the simplified model was considered a simplified high-precision model, and the simplified modes and simplified method adopted were proven to be reasonable; under the peak load error of the simplified model over 1.5A, the simplified modes and simplified method adopted were not suitable for the simplified modeling of the drone during the drop test.
Combining the above four verification tests and the peak load error of the full-size high-precision model, the peak load error standard of the simplified high-precision model was determined (
Table 9).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}