
An End-to-End UAV Simulation Platform for Visual SLAM and Navigation



Abstract
:1. Introduction
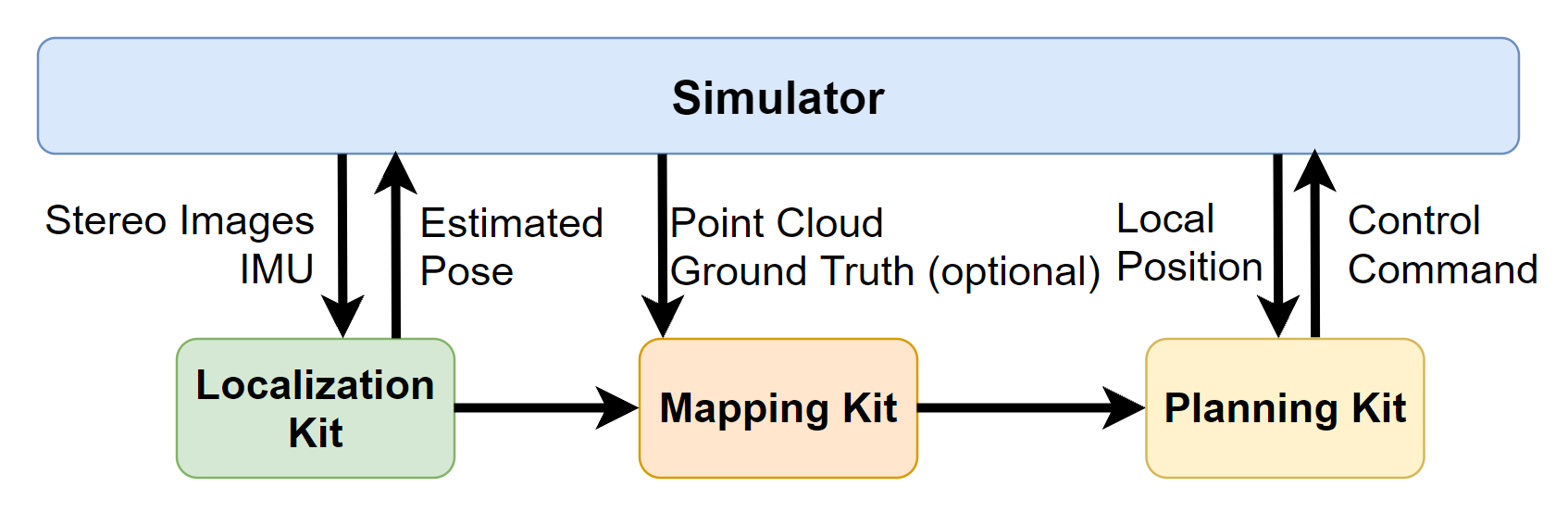
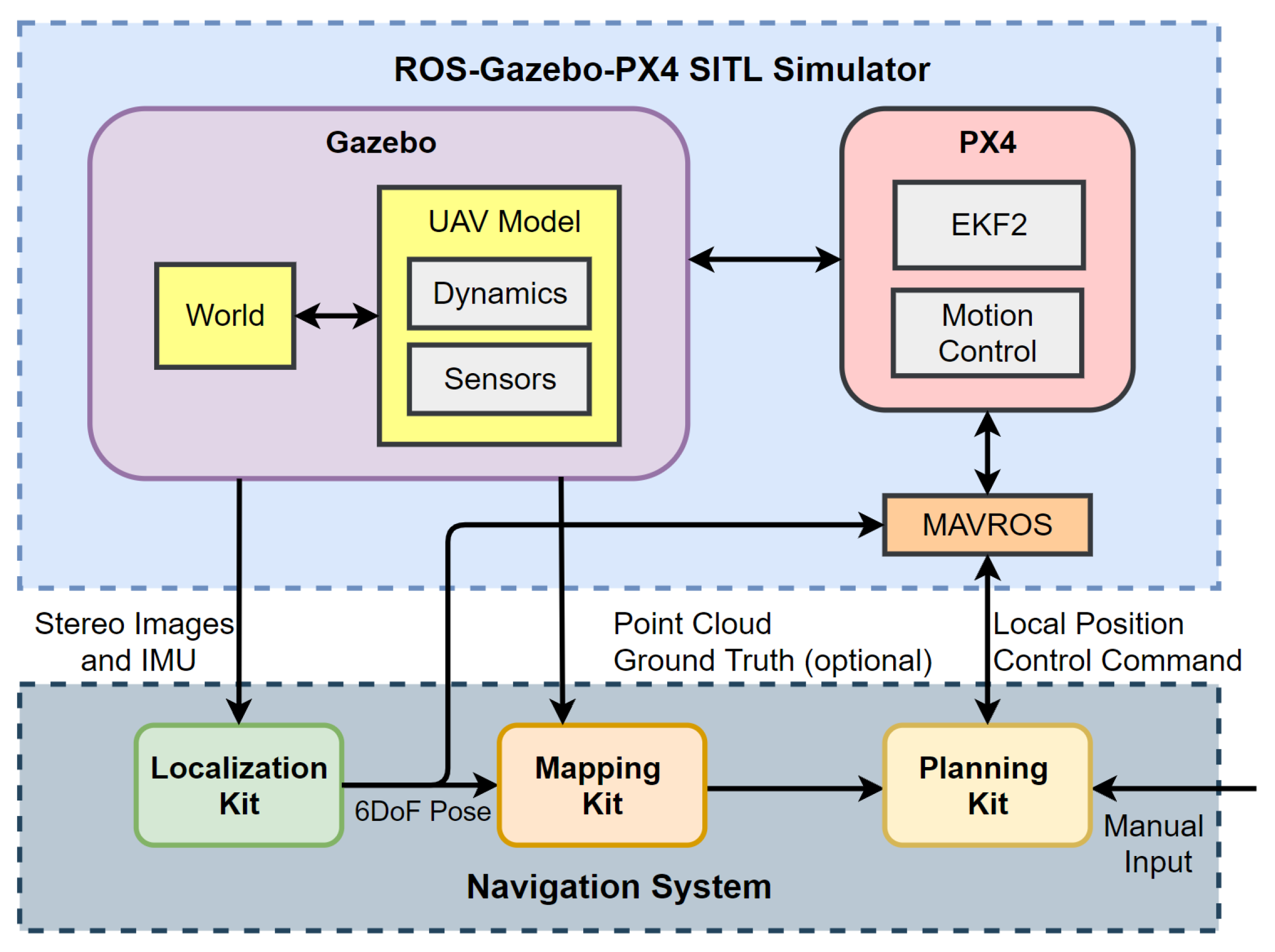
- Customization of the ROS-Gazebo-PX4 simulator in terms of the support of stereo inertial vision estimation, vision feedback control, and ground-truth level evaluation.
- Integration of functions, including localization, mapping, and planning, into tool kits.
- Achievement of click-and-fly level autonomy in the simulation environment.
- Release of the simulation setup, together with the localization kit, mapping kit, and planning kit as open-source tools for the research community (Supplementary Materials).
2. Related Works
2.1. UAV Simulators
2.2. The UAV vSLAM and Navigation System
2.2.1. Localization
2.2.2. Mapping
2.2.3. Planning
2.3. UAV SLAM and Navigation Simulations
3. Simulation Platform
3.1. Overview
3.2. The UAV Dynamic Model
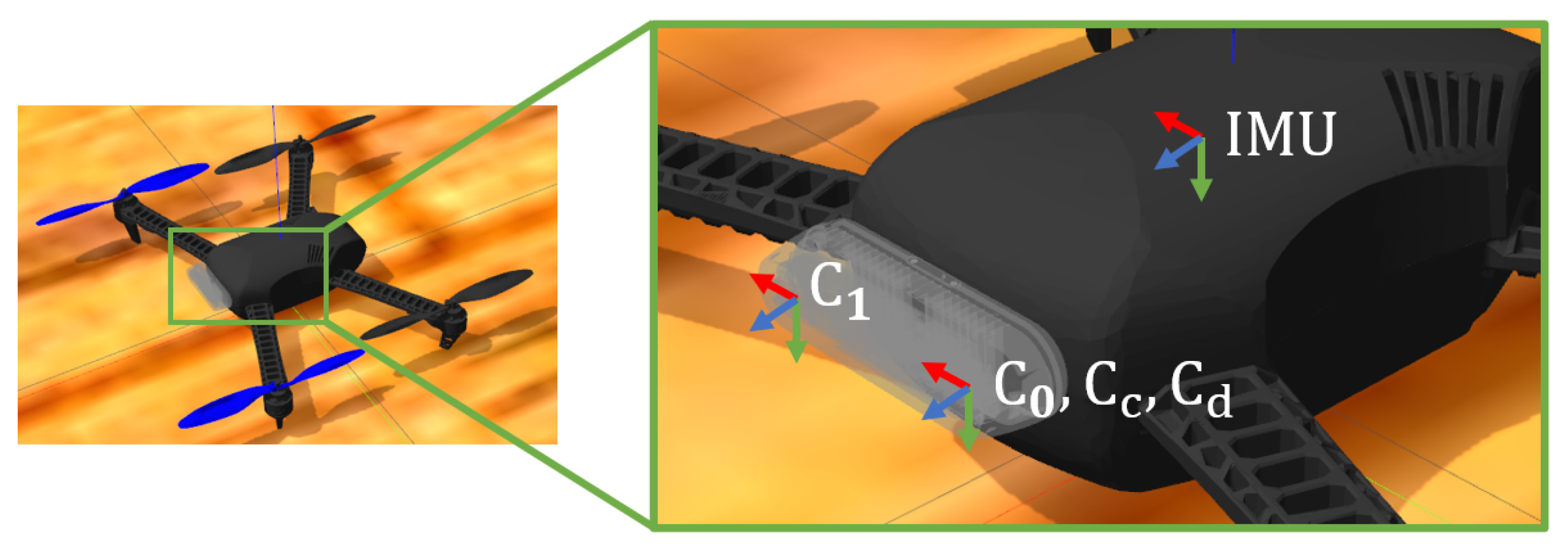
3.3. On-Board Sensors
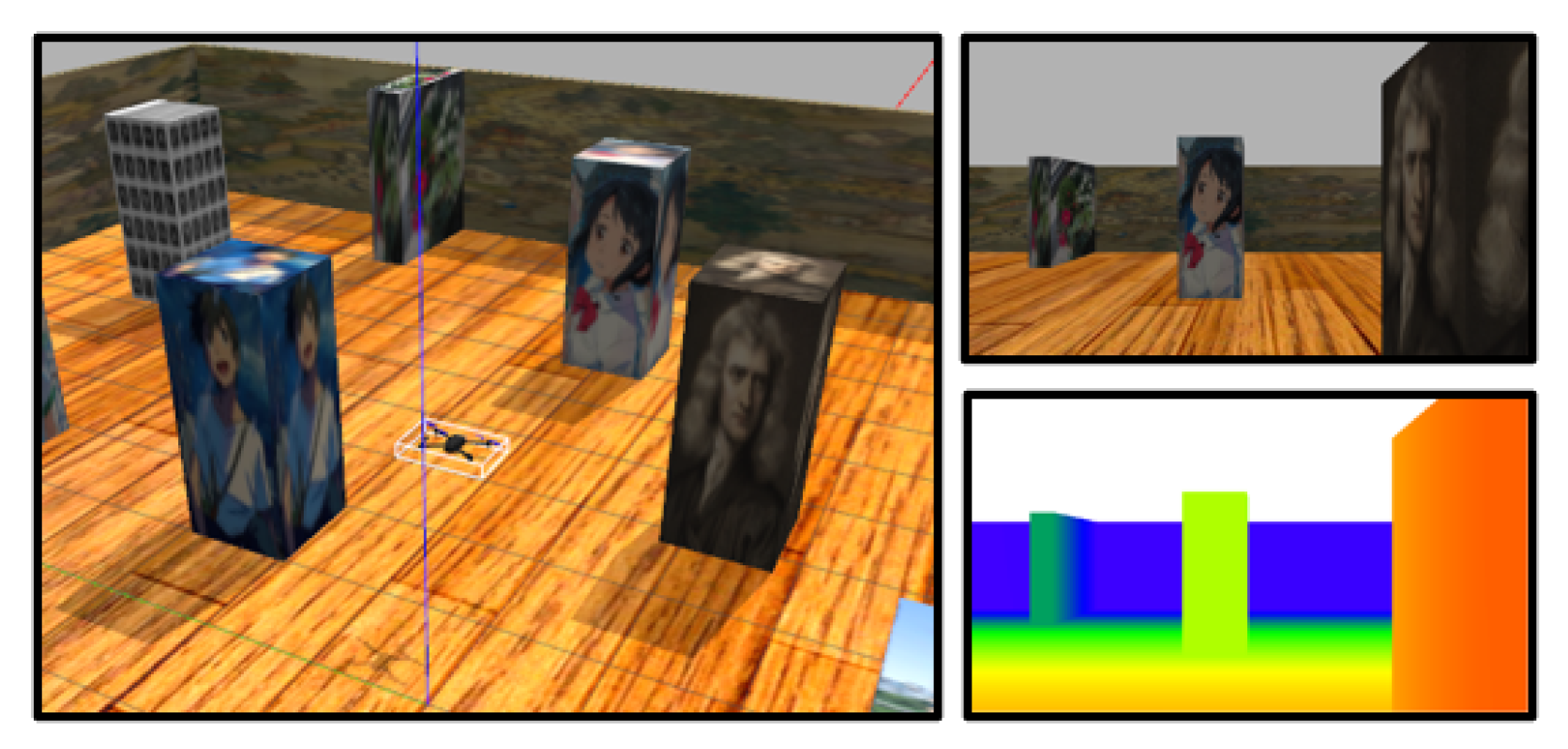
3.3.1. The Visual Sensor
3.3.2. The IMU
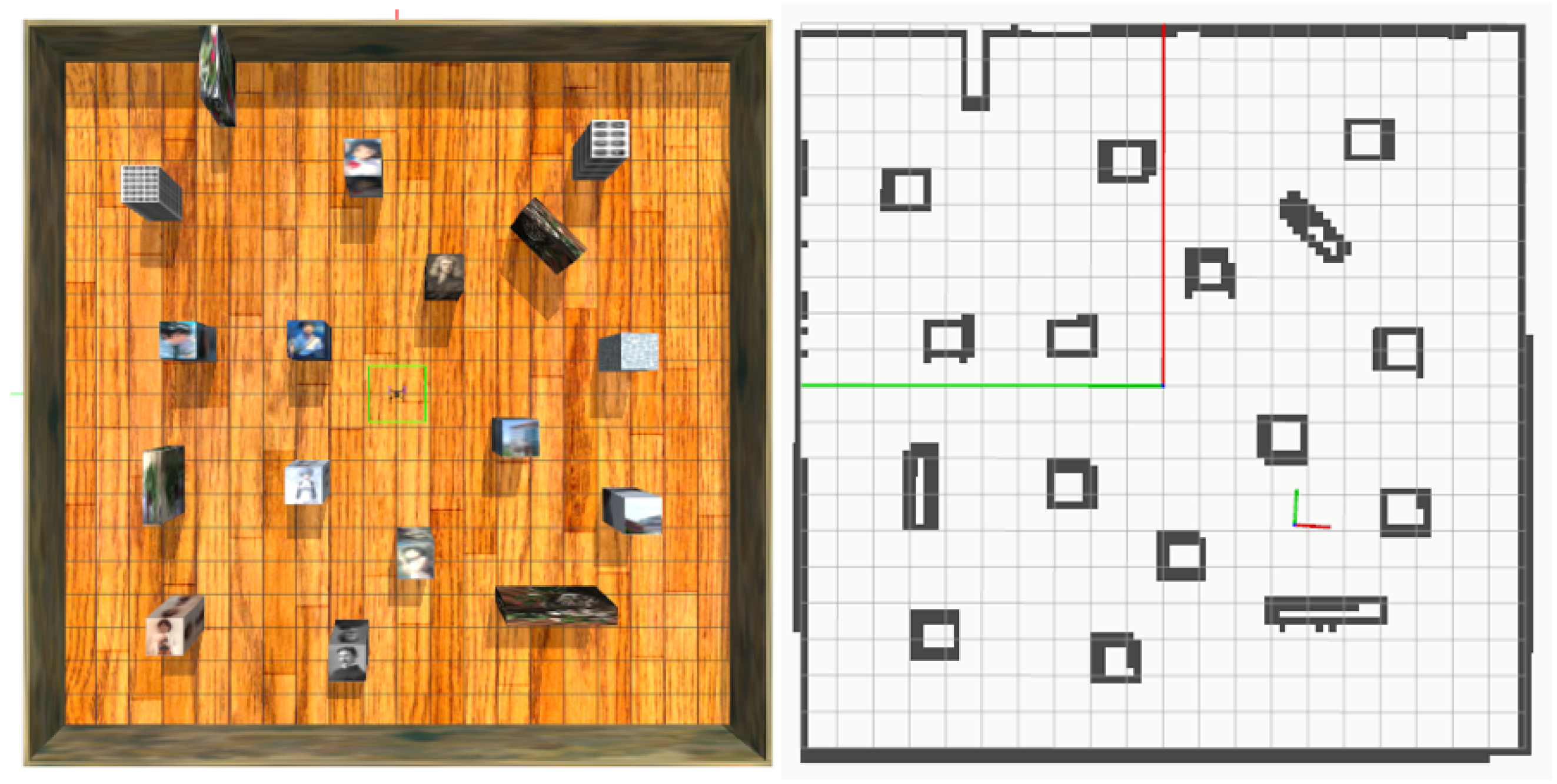
3.4. The Simulation World Setup
4. MAV Navigation Framework
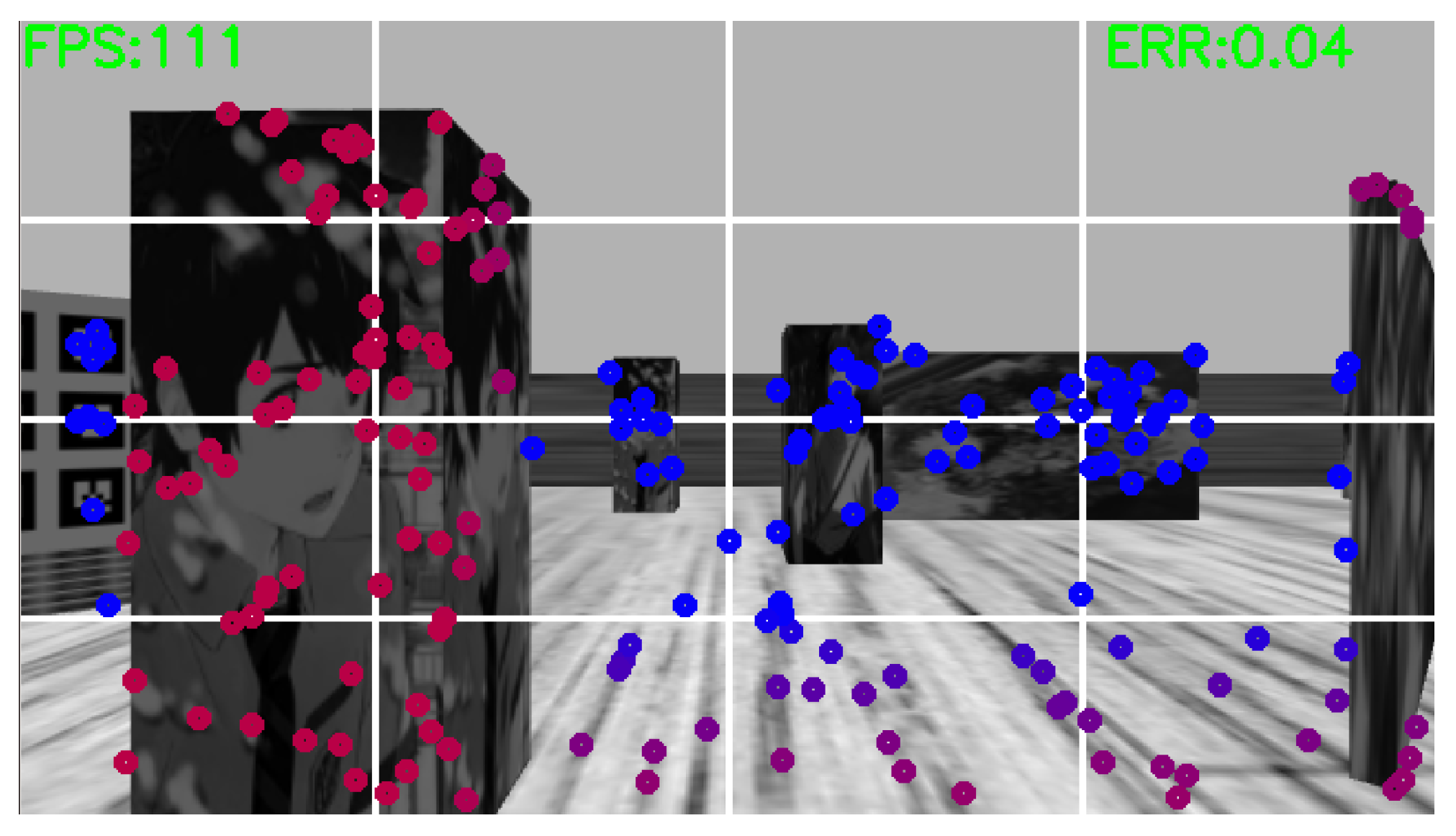
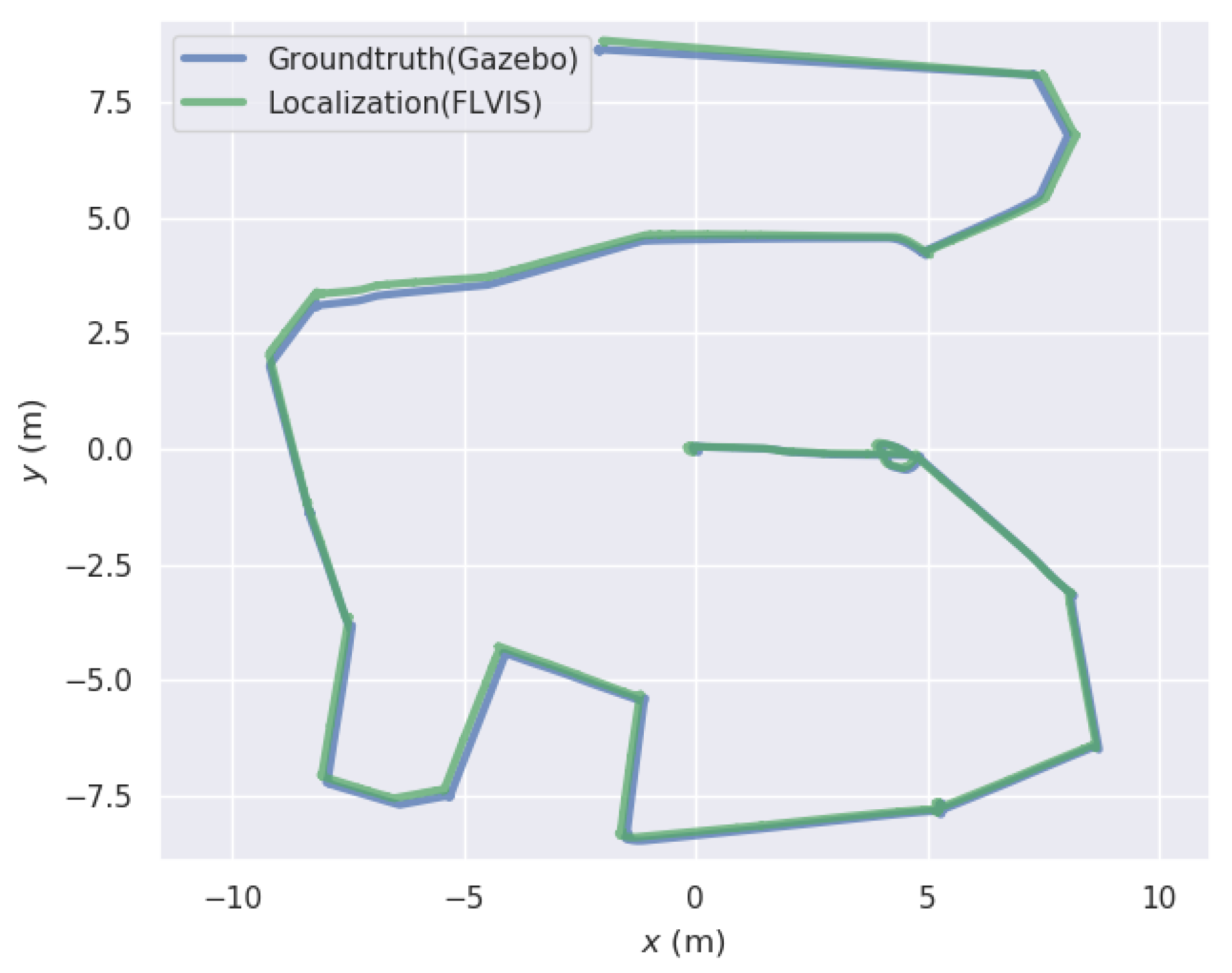
4.1. Localization
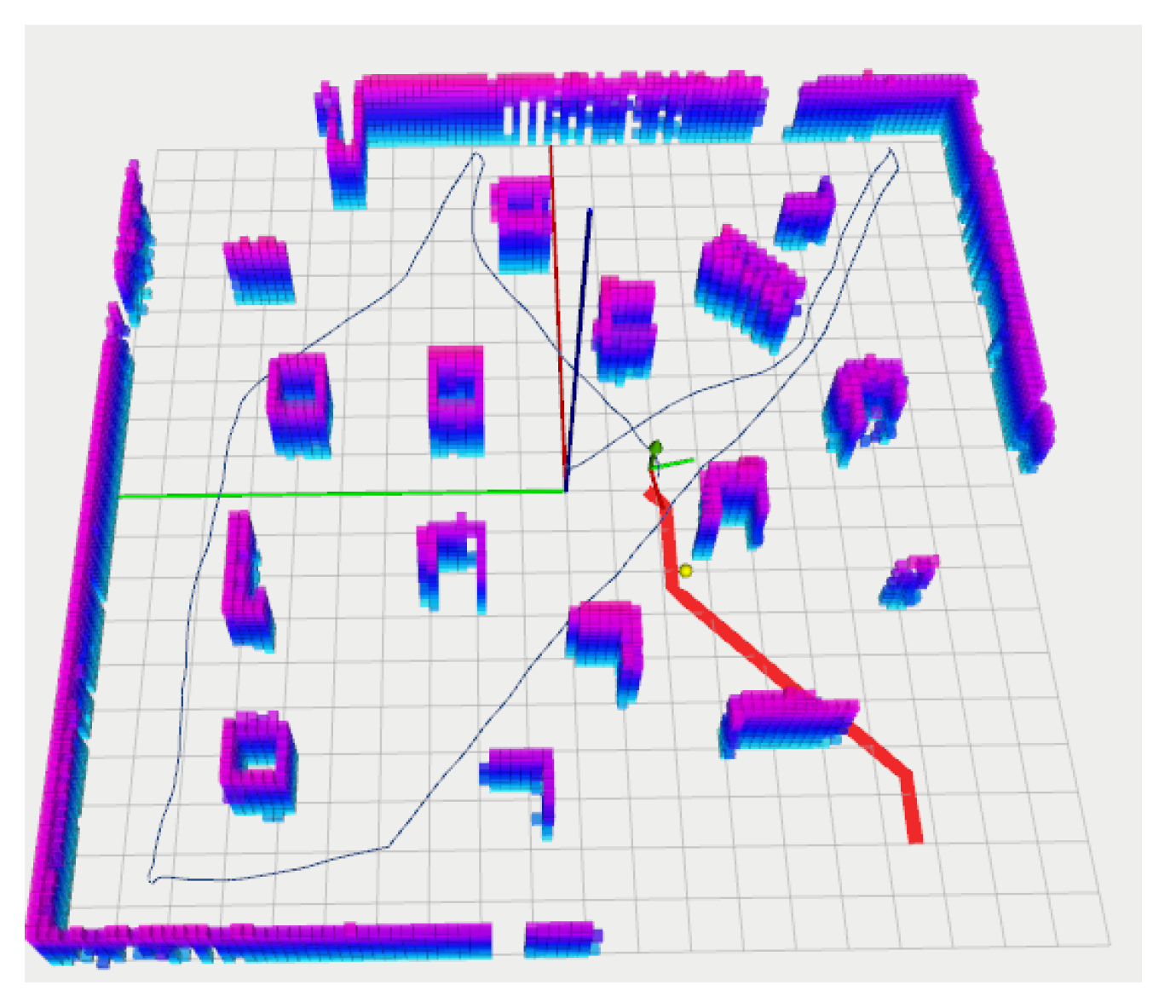
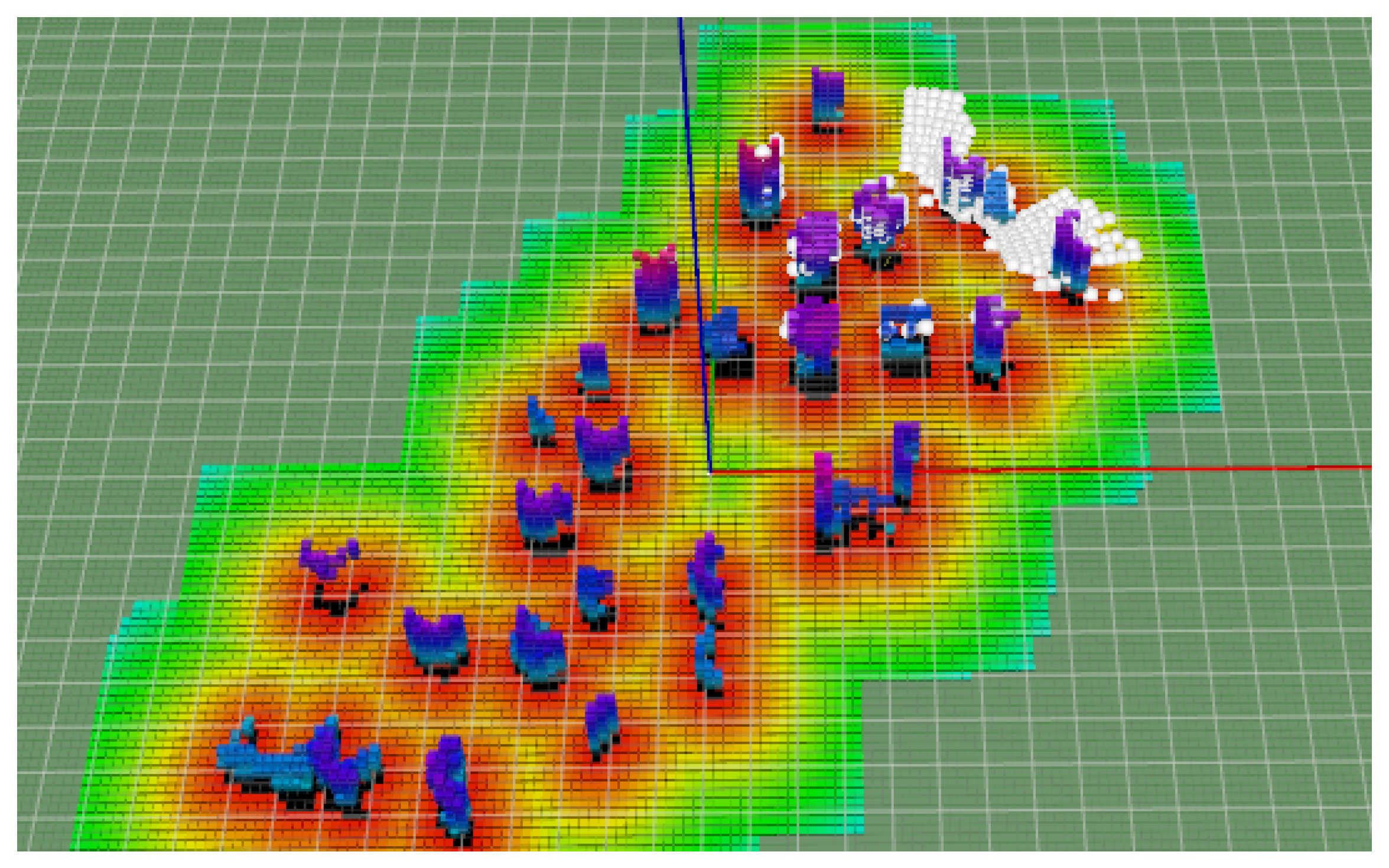
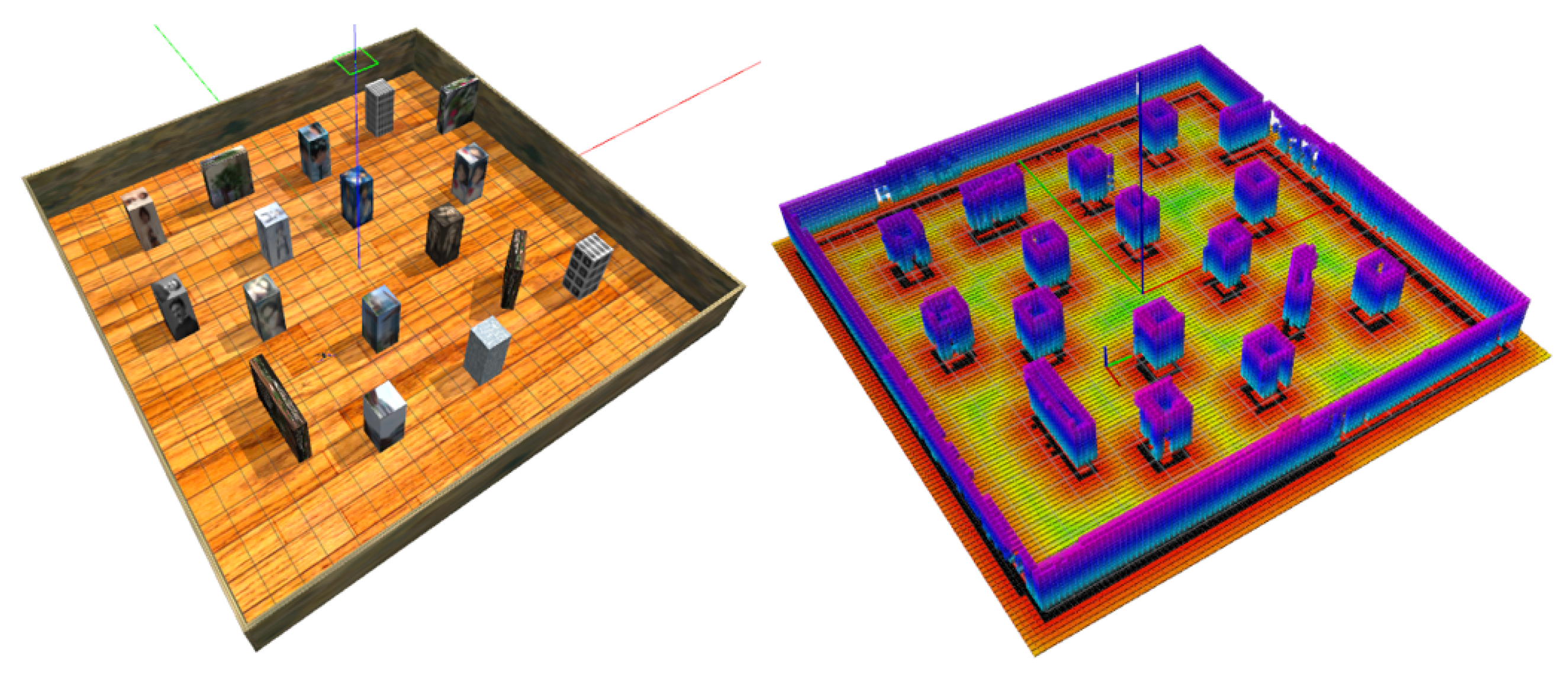
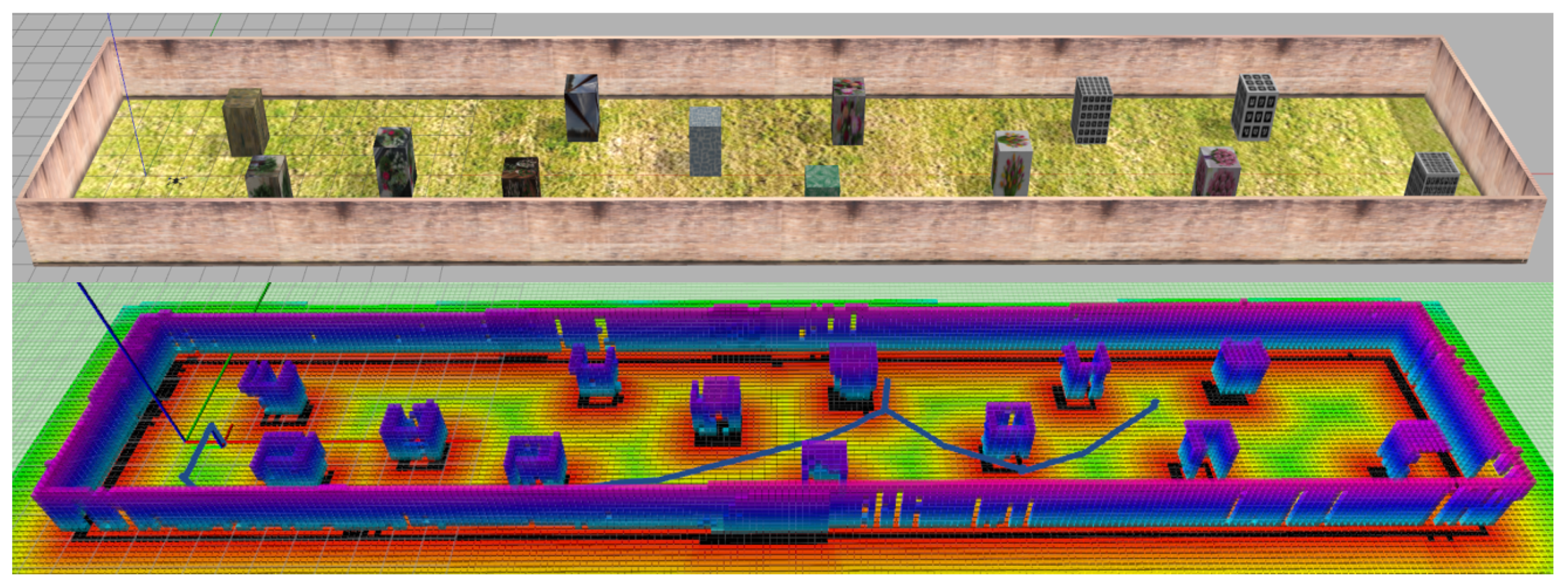
4.2. Mapping
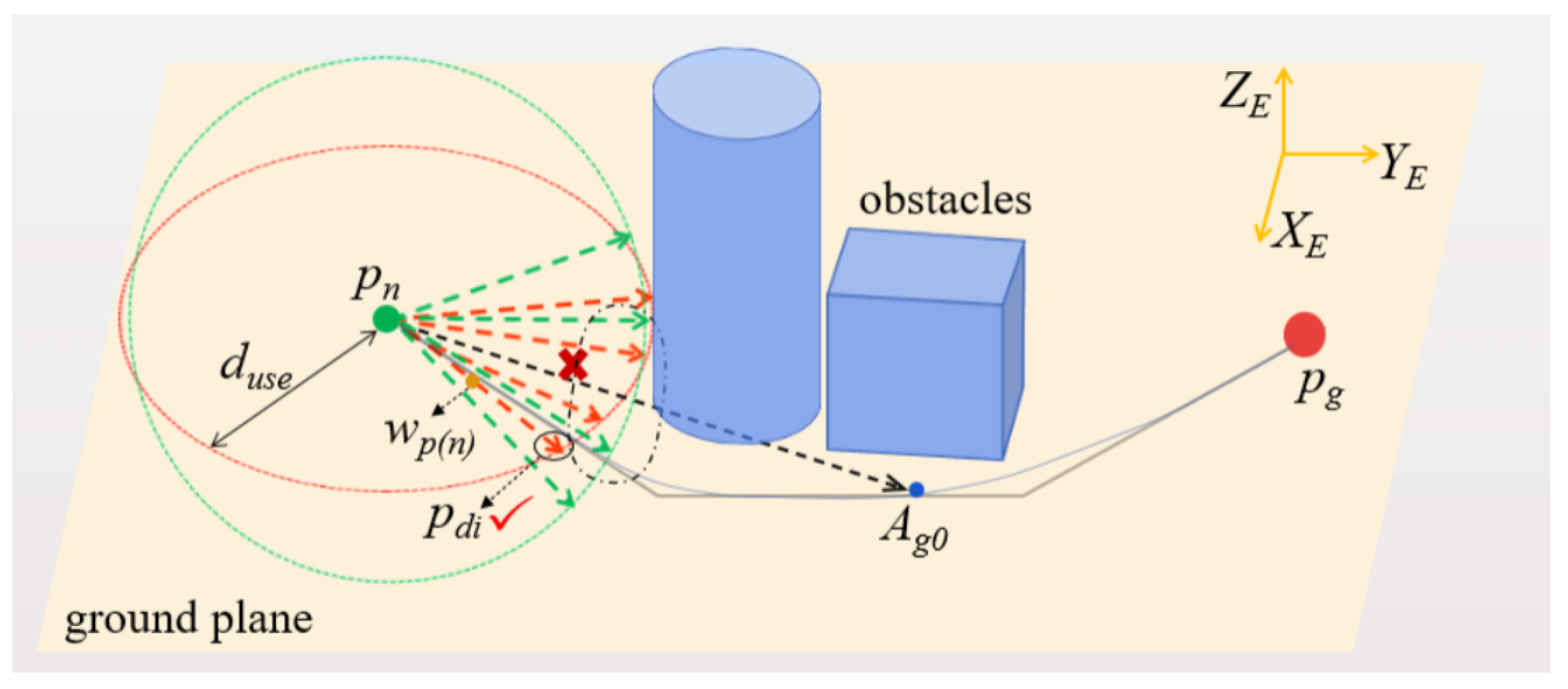
4.3. Path Planning and Obstacle Avoidance
| Algorithm 1 fuxi-Planner |
|
5. Simulation Results and Performance Analysis
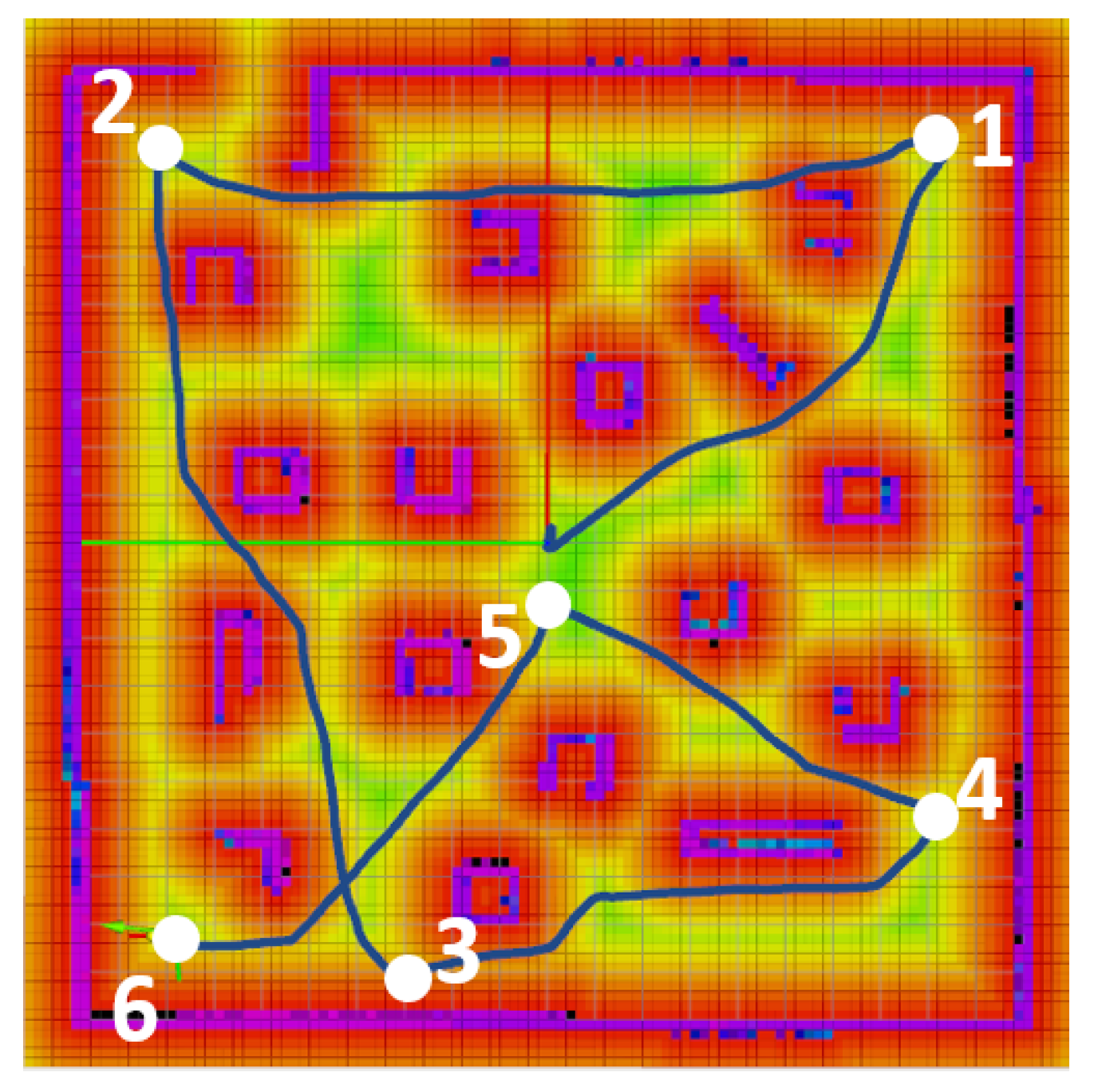
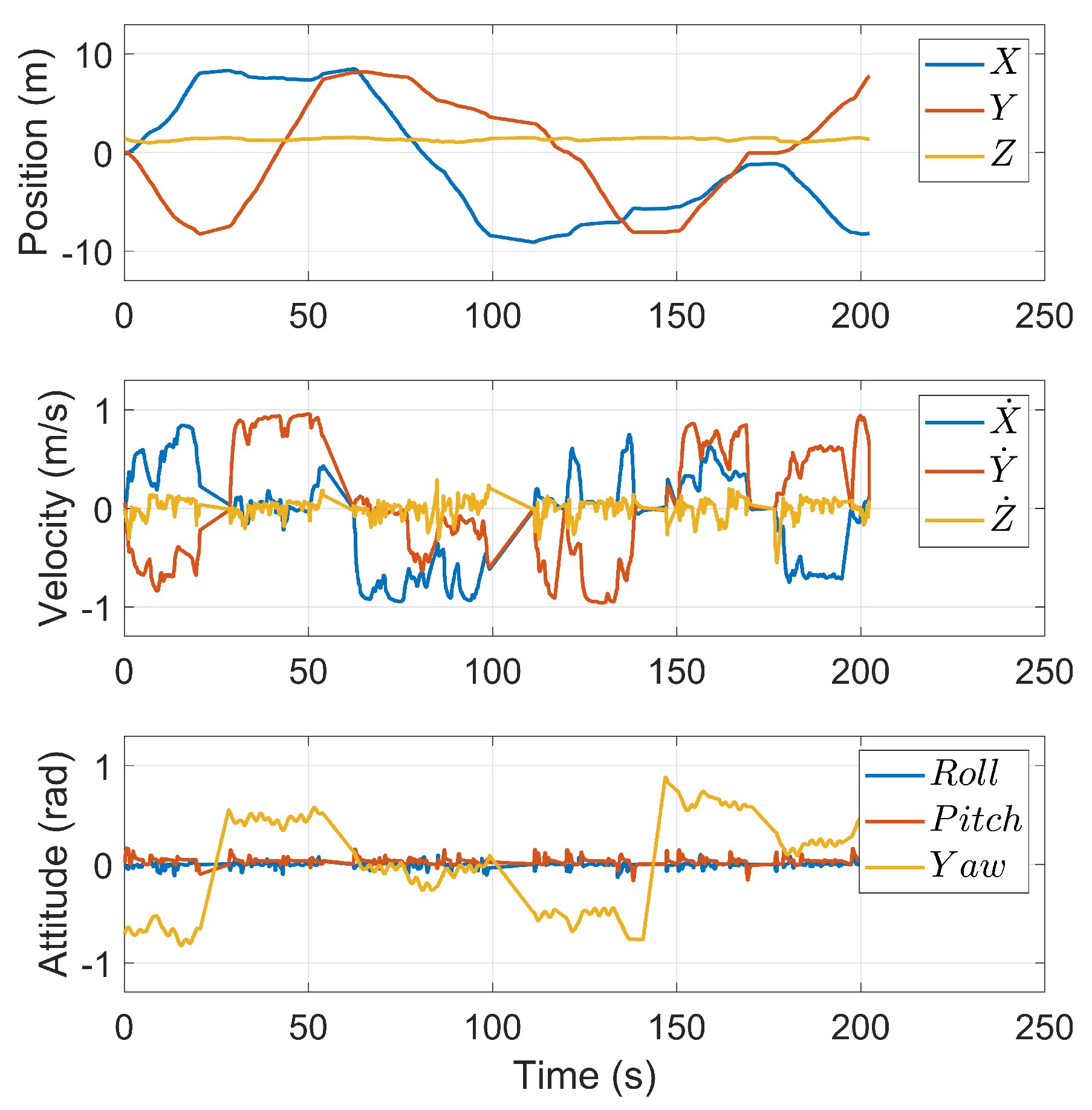
5.1. Manual Exploration
5.1.1. A 20 m × 20 m Room Environment
5.1.2. An 8 m × 40 m Corridor Environment
5.2. Click-and-Fly Level Autonomy
5.3. The Processing Speed of Simulation
5.4. Discussions
6. Conclusions and Future Works
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Oleynikova, H.; Millane, A.; Taylor, Z.; Galceran, E.; Nieto, J.; Siegwart, R. Signed distance fields: A natural representation for both mapping and planning. In Proceedings of the RSS 2016 Workshop: Geometry and Beyond-Representations, Physics, and Scene Understanding for Robotics, Ann Arbor, MI, USA, 19 June 2016. [Google Scholar]
- Zhang, M.; Qin, H.; Lan, M.; Lin, J.; Wang, S.; Liu, K.; Lin, F.; Chen, B.M. A high fidelity simulator for a quadrotor uav using ros and gazebo. In Proceedings of the IECON 2015-41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 2846–2851. [Google Scholar]
- Alzugaray, I.; Teixeira, L.; Chli, M. Short-term UAV path-planning with monocular-inertial SLAM in the loop. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2739–2746. [Google Scholar]
- Hartman, D.; Landis, K.; Mehrer, M.; Moreno, S.; Kim, J. dch33/Quad-Sim. Available online: https://github.com/dch33/Quad-Sim (accessed on 17 December 2021).
- Sun, J.; Li, B.; Wen, C.Y.; Chen, C.K. Design and implementation of a real-time hardware-in-the-loop testing platform for a dual-rotor tail-sitter unmanned aerial vehicle. Mechatronics 2018, 56, 1–15. [Google Scholar] [CrossRef]
- Furrer, F.; Burri, M.; Achtelik, M.; Siegwart, R. Robot Operating System (ROS): The Complete Reference; Chapter RotorS—A Modular Gazebo MAV Simulator Framework; Springer International Publishing: Cham, Switzerland, 2016; Volume 1, pp. 595–625. [Google Scholar] [CrossRef]
- Schmittle, M.; Lukina, A.; Vacek, L.; Das, J.; Buskirk, C.P.; Rees, S.; Sztipanovits, J.; Grosu, R.; Kumar, V. OpenUAV: A UAV testbed for the CPS and robotics community. In Proceedings of the ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS), Porto, Portugal, 11–13 April 2018; pp. 130–139. [Google Scholar]
- Xiao, K.; Tan, S.; Wang, G.; An, X.; Wang, X.; Wang, X. XTDrone: A Customizable Multi-rotor UAVs Simulation Platform. In Proceedings of the 2020 4th International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 12–14 June 2020; pp. 55–61. [Google Scholar] [CrossRef]
- Qian, J.; Chen, K.; Chen, Q.; Yang, Y.; Zhang, J.; Chen, S. Robust Visual-Lidar Simultaneous Localization and Mapping System for UAV. IEEE Geosci. Remote. Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Sadeghzadeh-Nokhodberiz, N.; Can, A.; Stolkin, R.; Montazeri, A. Dynamics-Based Modified Fast Simultaneous Localization and Mapping for Unmanned Aerial Vehicles With Joint Inertial Sensor Bias and Drift Estimation. IEEE Access 2021, 9, 120247–120260. [Google Scholar] [CrossRef]
- Demim, F.; Nemra, A.; Mouali, O.; Hedir, M.; Rouigueb, A.; Hamerlain, M.; Bendoumi, M.A.; Bazoula, A. Simultaneous Localization and Mapping Algorithm based on 3D Laser for Unmanned Aerial Vehicle. In Proceedings of the 4th International Conference on Electrical Engineering and Control Applications, Constantine, Algeria, 17–19 December 2019; Bououden, S., Chadli, M., Ziani, S., Zelinka, I., Eds.; Springer: Singapore; pp. 1003–1020. [Google Scholar]
- Qin, T.; Li, P.; Shen, S. Vins-mono: A robust and versatile monocular visual-inertial state estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Frost, D.; Prisacariu, V.; Murray, D. Recovering stable scale in monocular SLAM using object-supplemented bundle adjustment. IEEE Trans. Robot. 2018, 34, 736–747. [Google Scholar] [CrossRef]
- Pfrommer, B.; Daniilidis, K. TagSLAM: Robust SLAM with fiducial markers. arXiv 2019, arXiv:1910.00679. [Google Scholar]
- Mourikis, A.I.; Roumeliotis, S.I. A multi-state constraint Kalman filter for vision-aided inertial navigation. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 3565–3572. [Google Scholar]
- Bloesch, M.; Burri, M.; Omari, S.; Hutter, M.; Siegwart, R. Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback. Int. J. Robot. Res. 2017, 36, 1053–1072. [Google Scholar] [CrossRef] [Green Version]
- Leutenegger, S.; Lynen, S.; Bosse, M.; Siegwart, R.; Furgale, P. Keyframe-based visual–inertial odometry using nonlinear optimization. Int. J. Robot. Res. 2015, 34, 314–334. [Google Scholar] [CrossRef] [Green Version]
- Delmerico, J.; Scaramuzza, D. A benchmark comparison of monocular visual-inertial odometry algorithms for flying robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 2502–2509. [Google Scholar]
- Gao, F.; Wu, W.; Gao, W.; Shen, S. Flying on point clouds: Online trajectory generation and autonomous navigation for quadrotors in cluttered environments. J. Field Robot. 2019, 36, 710–733. [Google Scholar] [CrossRef]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef] [Green Version]
- Oleynikova, H.; Taylor, Z.; Fehr, M.; Siegwart, R.; Nieto, J. Voxblox: Incremental 3d euclidean signed distance fields for on-board mav planning. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1366–1373. [Google Scholar]
- Han, L.; Gao, F.; Zhou, B.; Shen, S. Fiesta: Fast incremental euclidean distance fields for online motion planning of aerial robots. arXiv 2019, arXiv:1903.02144. [Google Scholar]
- LaValle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning; Technical Report; Computer Science Department, Iowa State University: Ames, IA, USA, 1998. [Google Scholar]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar]
- Gao, F.; Lin, Y.; Shen, S. Gradient-based online safe trajectory generation for quadrotor flight in complex environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3681–3688. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Chen, H.; Lu, P.; Xiao, C. Dynamic Obstacle Avoidance for UAVs Using a Fast Trajectory Planning Approach. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 1459–1464. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Meier, L.; Honegger, D.; Pollefeys, M. PX4: A node-based multithreaded open source robotics framework for deeply embedded platforms. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6235–6240. [Google Scholar]
- Lee, T.; Leok, M.; McClamroch, N.H. Geometric tracking control of a quadrotor UAV on SE (3). In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 5420–5425. [Google Scholar]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor Aerial Vehicles: Modeling, Estimation, and Control of Quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Verling, S.; Weibel, B.; Boosfeld, M.; Alexis, K.; Burri, M.; Siegwart, R. Full Attitude Control of a VTOL tailsitter UAV. IEEE Int. Conf. Robot. Autom. 2016. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Wen, C.Y.; Zou, Y.; Chen, W. Stereo Visual Inertial Pose Estimation Based on Feedforward-Feedback Loops. arXiv 2020, arXiv:2007.02250. [Google Scholar]
- Chen, H.; Lu, P. Computationally Efficient Obstacle Avoidance Trajectory Planner for UAVs Based on Heuristic Angular Search Method. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; pp. 5693–5699. [Google Scholar] [CrossRef]
- Harabor, D.; Grastien, A. Improving Jump Point Search. In Proceedings of the Twenty-Fourth International Conferenc on International Conference on Automated Planning and Scheduling (ICAPS’14), Portsmouth, NH, USA, 21–26 June 2014; pp. 128–135. [Google Scholar]
- Grupp, M. EVO: Python Package for the Evaluation of Odometry and SLAM. Available online: https://github.com/MichaelGrupp/evo (accessed on 17 December 2021).
- Umeyama, S. Least-squares estimation of transformation parameters between two point patterns. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 376–380. [Google Scholar] [CrossRef] [Green Version]
- Shah, S.; Dey, D.; Lovett, C.; Kapoor, A. AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles; Field and Service Robotic; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 621–635. [Google Scholar]
- Guerra, W.; Tal, E.; Murali, V.; Ryou, G.; Karaman, S. FlightGoggles: Photorealistic Sensor Simulation for Perception-driven Robotics using Photogrammetry and Virtual Reality. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 6941–6948. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kits | Computer 1 | Computer 2 | |
|---|---|---|---|
| Localization (with out-loop closure) | 28 ms | 22 ms | |
| Mapping | Global map | 26 ms | 18 ms |
| Local map | 4 ms | 4 ms | |
| Projected ESDFs map | 70 ms | 64 ms | |
| Planning | Global planning | 90 ms | 65 ms |
| Local planning | 20 ms | 16 ms | |
| Simulator | Average time factor | 0.6 | 0.92 |
| Features | E2ES | XTDrone [8] | AirSim [39] | FlightGoggles [40] |
|---|---|---|---|---|
| Rendering Engine | OpenGL | OpenGL | Unreal Engine | Unity |
| Dynamics | Gazebo | Gazebo | PhysX | User Define |
| Localization | Support | Support | Support | Support |
| Planning | Support | Support | Support | Support |
| Full Stack Solution | Support | Not Support | Not Support | Not Support |
| Multiple Vehicles | Not Support | Support | Support | Not Support |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Zhou, W.; Yang, A.-S.; Chen, H.; Li, B.; Wen, C.-Y. An End-to-End UAV Simulation Platform for Visual SLAM and Navigation. Aerospace 2022, 9, 48. https://doi.org/10.3390/aerospace9020048
Chen S, Zhou W, Yang A-S, Chen H, Li B, Wen C-Y. An End-to-End UAV Simulation Platform for Visual SLAM and Navigation. Aerospace. 2022; 9(2):48. https://doi.org/10.3390/aerospace9020048
Chicago/Turabian StyleChen, Shengyang, Weifeng Zhou, An-Shik Yang, Han Chen, Boyang Li, and Chih-Yung Wen. 2022. "An End-to-End UAV Simulation Platform for Visual SLAM and Navigation" Aerospace 9, no. 2: 48. https://doi.org/10.3390/aerospace9020048
APA StyleChen, S., Zhou, W., Yang, A. -S., Chen, H., Li, B., & Wen, C. -Y. (2022). An End-to-End UAV Simulation Platform for Visual SLAM and Navigation. Aerospace, 9(2), 48. https://doi.org/10.3390/aerospace9020048