
Evaluation and Comparison of Hybrid Wing VTOL UAV with Four Different Electric Propulsion Systems


Abstract
:1. Introduction
2. Propulsion and Power System Analysis
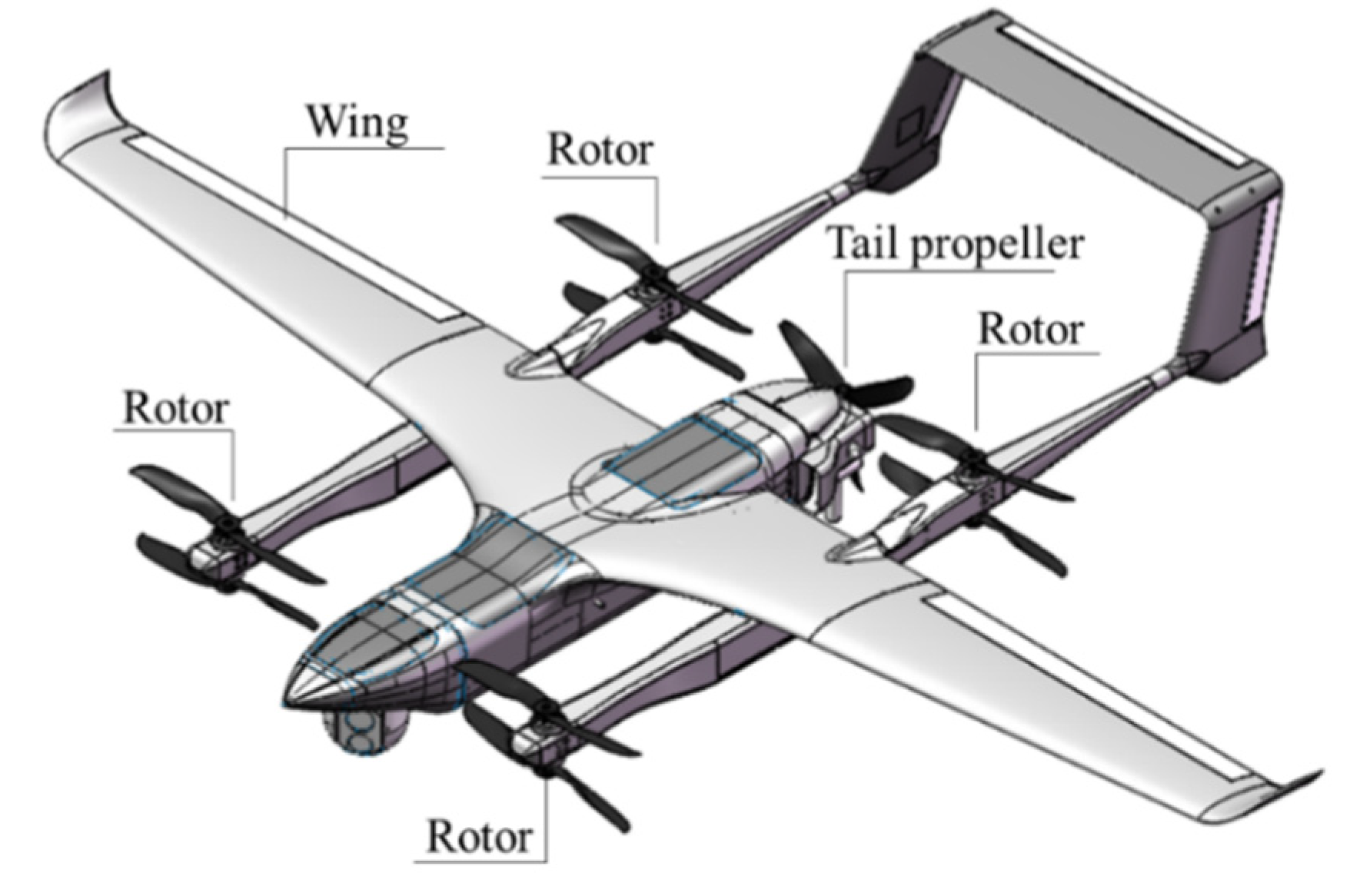
2.1. Structures of Electric Propulsion System
2.2. Energy Saving Mechanism and Power Distribution
- Compared with the turboelectric propulsion system, a smaller ICE is needed to meet the power demand of cruise and charging, and the battery provides additional power such as takeoff and climb, so as to improve the load rate of ICE;
- Make ICE always work in the optimal fuel economy area;
- In cruise phase, when ICE works in the optimal fuel economy area, the excess energy charges the battery to improve the overall efficiency of the propulsion system.
2.3. Mass Calculation
2.3.1. Composition of UAV Mass
2.3.2. Power Calculation
2.3.3. Mass Estimation of Propulsion and Power System
3. Initial Sizing Method
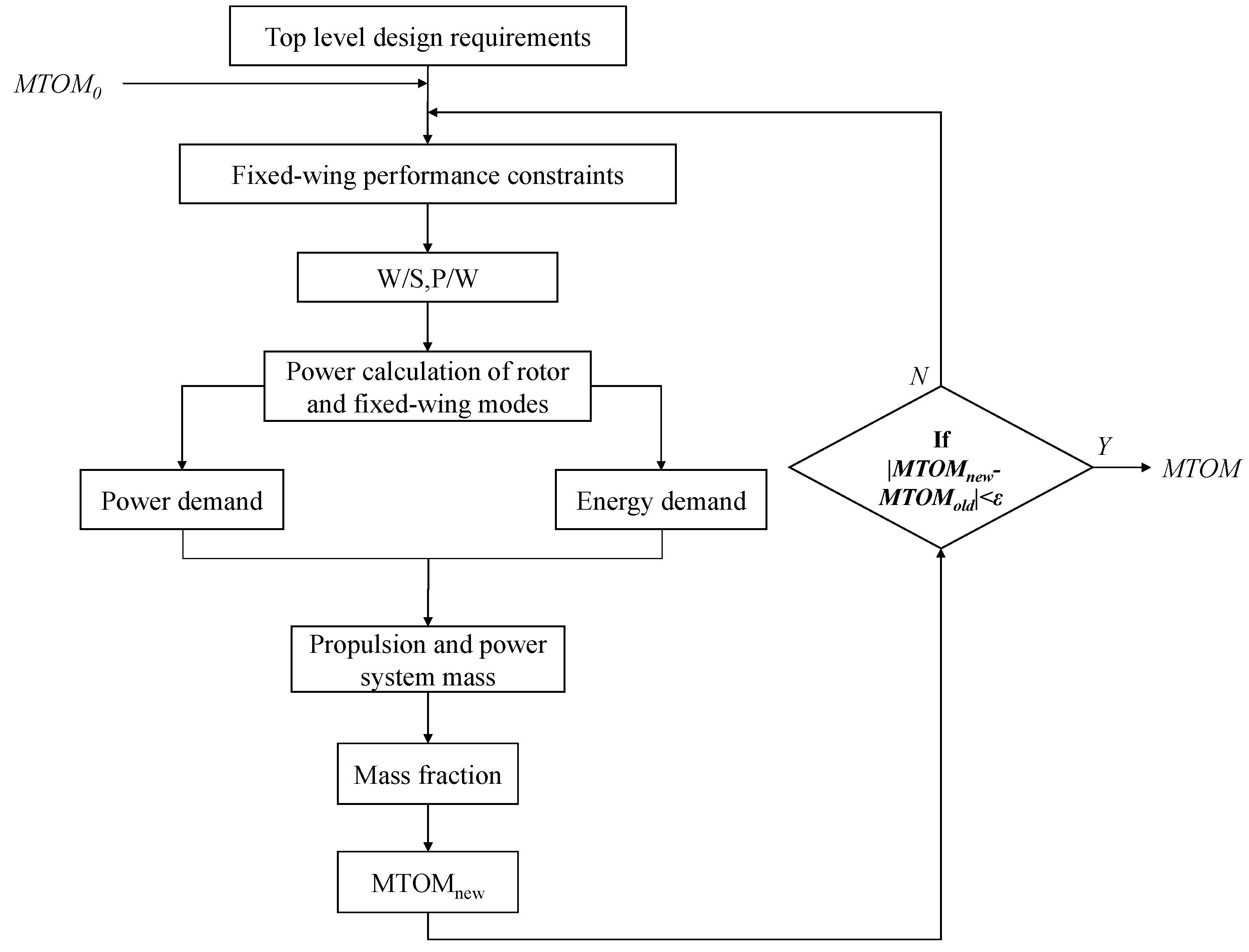
3.1. Initial Sizing Process
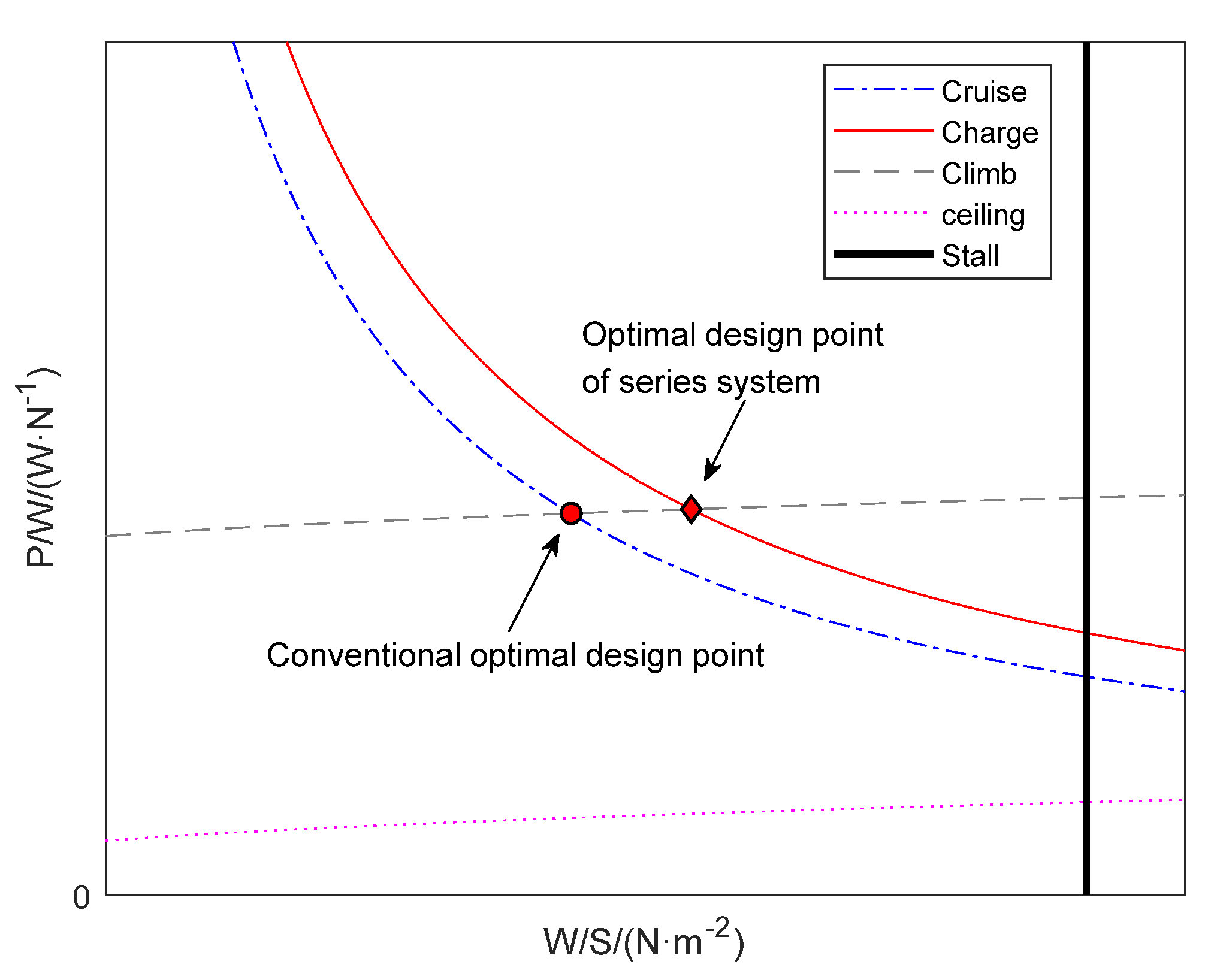
3.2. Fixed-Wing Constraint Analysis and Design Point Selection
4. Numerical Results
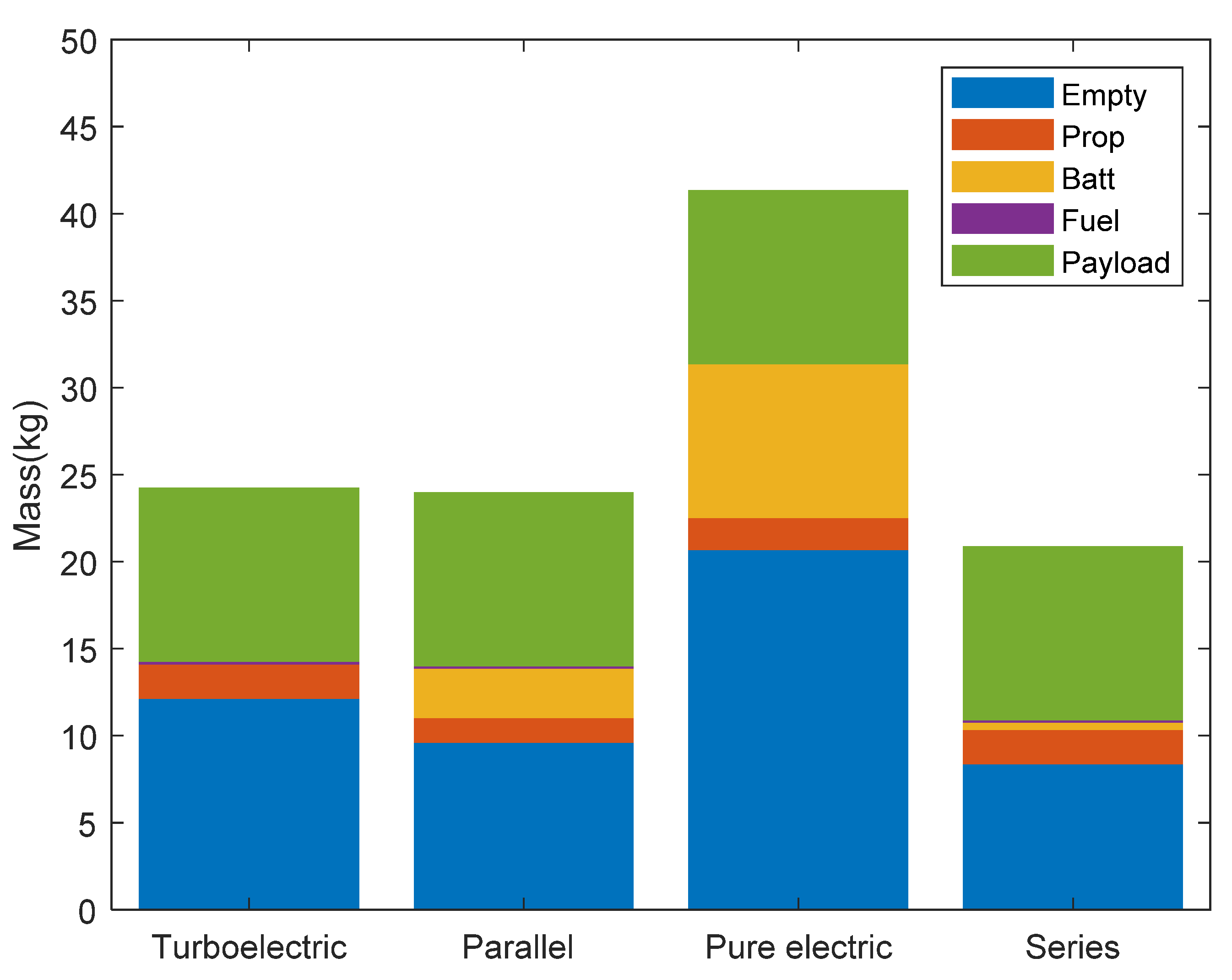
4.1. Case Studies
4.2. Sensitivity Study
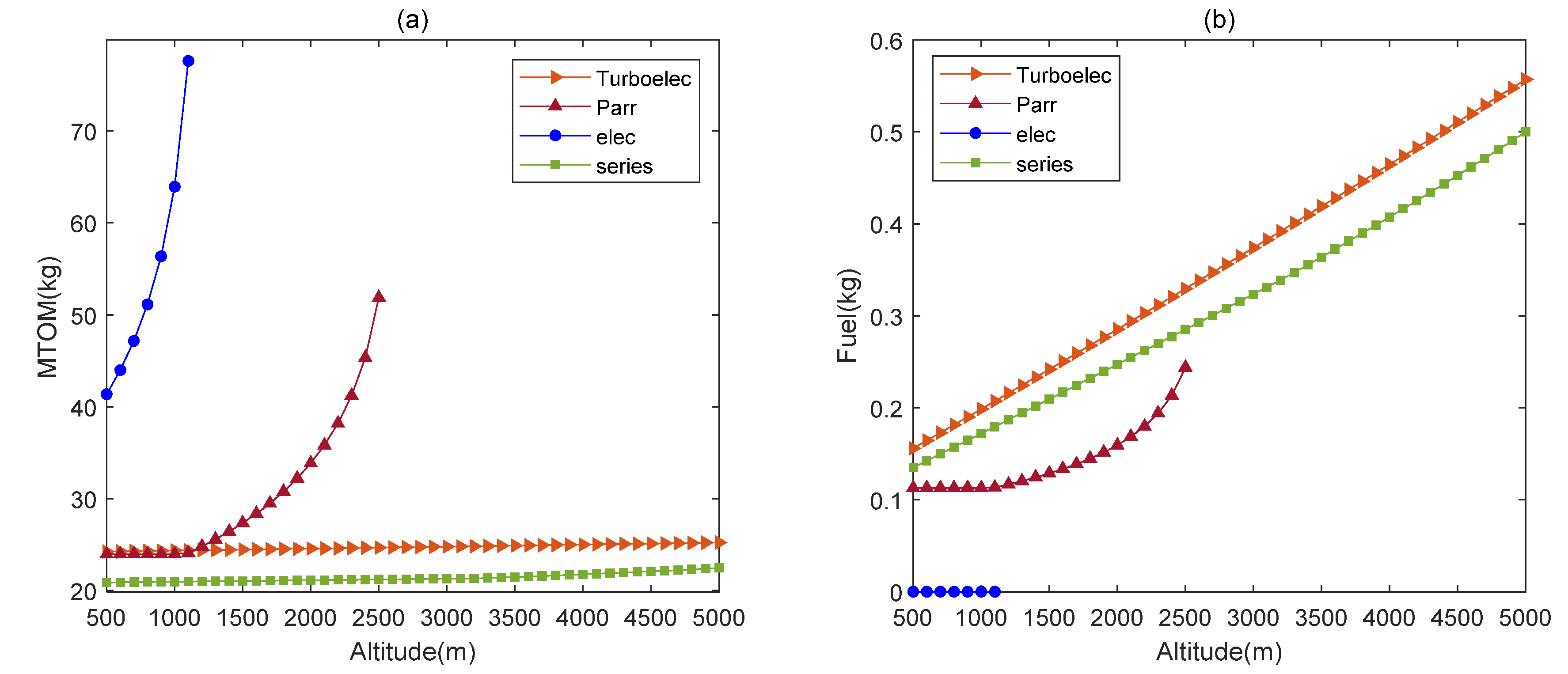
4.2.1. Takeoff Altitude Sensitivity
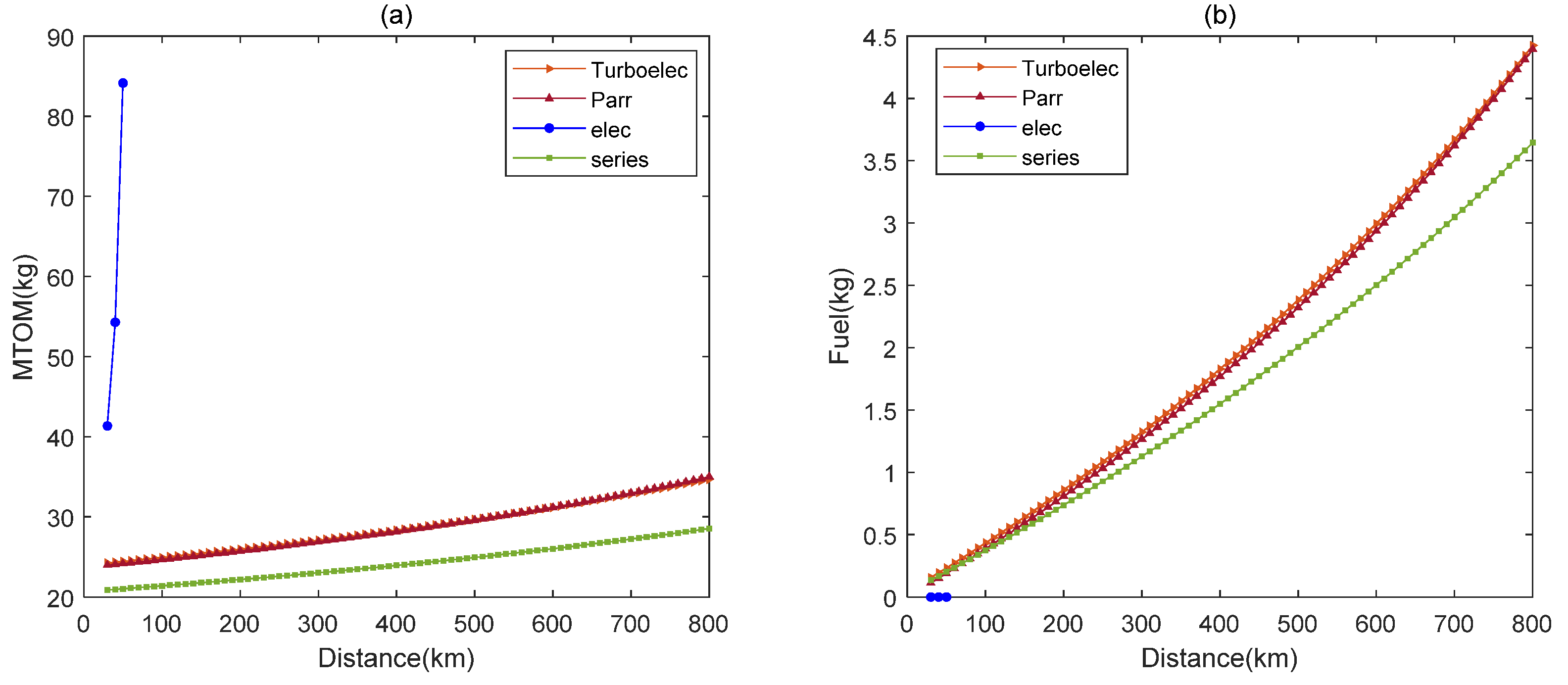
4.2.2. Cruise Distance Sensitivity
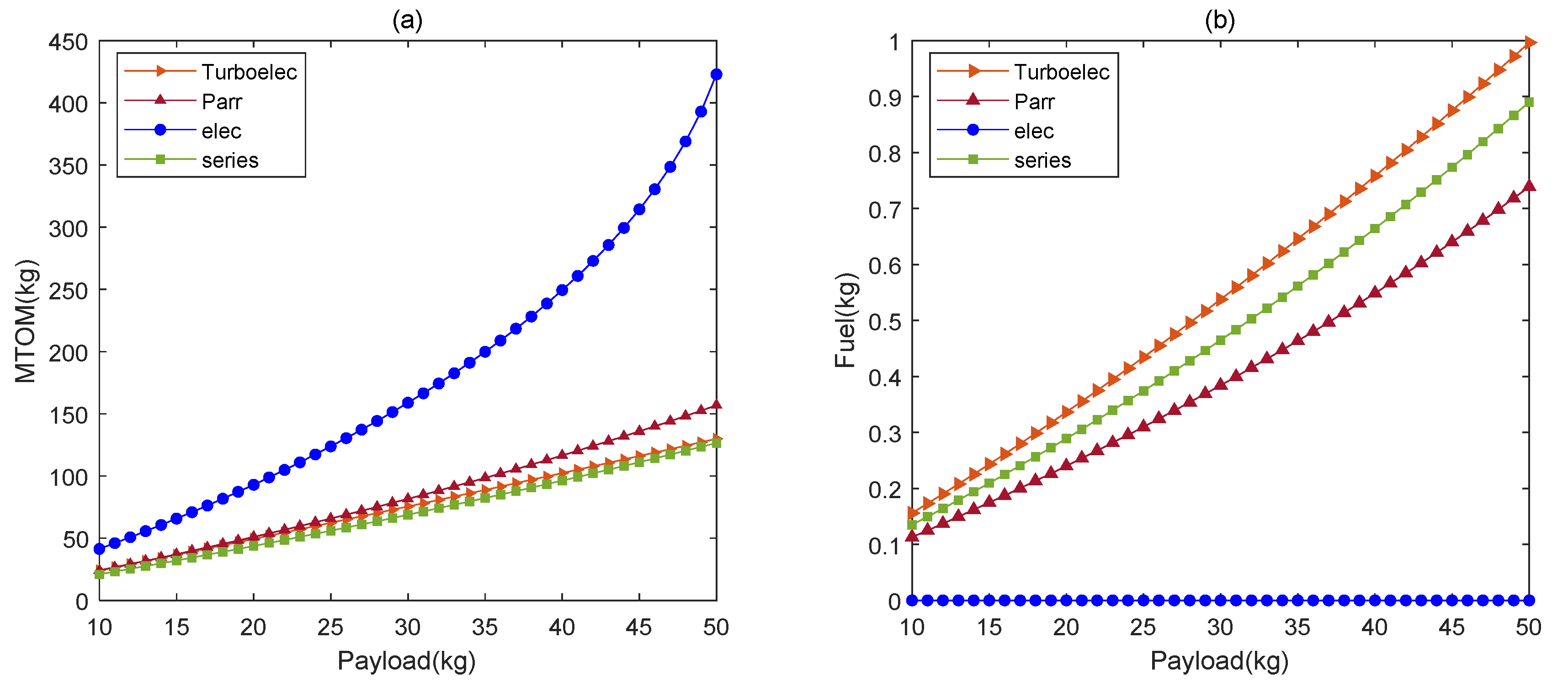
4.2.3. Payload Sensitivity
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brelje, B.J.; Martins, J.R. Electric, hybrid, and turboelectric fixed-wing aircraft: A review of concepts, models, and design approaches. Prog. Aerosp. Sci. 2019, 104, 1–19. [Google Scholar] [CrossRef]
- Kim, H.D.; Perry, A.T.; Ansell, P.J. A Review of Distributed Electric Propulsion Concepts for Air Vehicle Technology. Presented at the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium, Cincinnati, OH, USA, 12–14 July 2018. [Google Scholar]
- Moore, M. NASA Puffin Electric Tailsitter VTOL Concept. Presented at the 10th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Fort Worth, TX, USA, 13–15 September 2010. [Google Scholar]
- Kim, H.; Brown, G.; Felder, J. Distributed Turboelectric Propulsion for Hybrid Wing Body Aircraft. In Proceedings of the 9th International Powered Lift Conference, London, UK, 22–24 July 2008. [Google Scholar]
- Busan, R.C.; Murphy, P.C.; Hatke, D.B.; Simmons, B.M. Wind Tunnel Testing Techniques for a Tandem Tilt-Wing, Distributed Electric Propulsion VTOL Aircraft. Presented at the AIAA Scitech 2021 Forum, VIRTUAL EVENT, 19–21 January 2021. [Google Scholar]
- Gladin, J.C.; Trawick, D.; Perullo, C.; Tai, J.C.; Mavris, D.N. Modeling and Design of a Partially Electric Distributed Aircraft Propulsion System with GT-HEAT. Presented at the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Perry, A.T.; Bretl, T.; Ansell, P.J. System Identification and Dynamics Modeling of a Distributed Electric Propulsion Aircraft. Presented at the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar]
- Footohi, P.; Bouskela, A.; Shkarayev, S.V. Aerodynamic Design of Long-Range VTOL UAV. Presented at the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Kamal, A.; Ramirez-Serrano, A. Conceptual Design of a Highly-Maneuverable Transitional VTOL UAV with New Maneuver and Control Capabilities. Presented at the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Kaparos, P.E.; Bliamis, C.D.; Yakinthos, K. Conceptual design of a UAV with VTOL characteristics. Presented at the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar]
- Bouchard, E.D.; Rancourt, D.; Mavris, D.N. Integration of Electric Propulsion in Efficient Heavy-Lift VTOL Concept. Presented at the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar]
- Fredericks, W.J.; Moore, M.D.; Busan, R.C. Benefits of Hybrid-Electric Propulsion to Achieve 4x Cruise Efficiency for a VTOL UAV. Presented at the 2013 International Powered Lift Conference, Los Angeles, CA, USA, 12–14 August 2013. [Google Scholar]
- Vitalle, R.F.; Zhang, Y.; Normann, B.; Shen, N. A Model for the Integration of UAM operations in and near Terminal Areas. Presented at the Aiaa Aviation 2020 Forum, VIRTUAL EVENT, 15–19 June 2020. [Google Scholar]
- Thipphavong, D.P.; Apaza, R.; Barmore, B.; Battiste, V.; Burian, B.; Dao, Q.; Verma, S.A. Urban Air Mobility Airspace Integration Concepts and Considerations. Presented at the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- National Academies of Sciences and Medicine, Engineering. Advancing Aerial Mobility: A National Blueprint; The National Academies Press: Washington, DC, USA, 2020; p. 82. [Google Scholar]
- Joby Aviation Generates First Revenue, Takes Key Step towards Certifying Aircraft. Available online: https://www.jobyaviation.com/news/joby-aviation-generates-first-revenue-takes-key-step-towards-certifying-aircraft/ (accessed on 9 February 2021).
- Lee, C.; Kim, S.; Chu, B. A Survey: Flight Mechanism and Mechanical Structure of the UAV. Int. J. Precis. Eng. Manuf. 2021, 22, 719–743. [Google Scholar] [CrossRef]
- NASA Electric Propulsion System Studies. Available online: https://ntrs.nasa.gov/api/citations/20160009274/downloads/20160009274.pdf (accessed on 30 November 2015).
- Finger, D.F.; Bil, C.; Braun, C. Initial Sizing Methodology for Hybrid-Electric General Aviation Aircraft. J. Aircr. 2020, 57, 245–255. [Google Scholar] [CrossRef]
- Culley, D.E.; Kratz, J.L.; Thomas, G.L. Turbine Electrified Energy Management (TEEM) For Enabling More Efficient Engine Designs. Presented at the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar]
- Gudmundsson, S. General Aviation Aircraft Design: Applied Methods and Procedures; Butterworth-Heinemann: Oxford, UK, 2014. [Google Scholar]
- Gundlach, J. Designing Unmanned Aircraft Systems—A Comprehensive Approach; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2011. [Google Scholar]
- Tyan, M.; Van Nguyen, N.; Kim, S.; Lee, J.-W. Comprehensive preliminary sizing/resizing method for a fixed wing—VTOL electric UAV. Aerosp. Sci. Technol. 2017, 71, 30–41. [Google Scholar] [CrossRef]
- Alulema, V.; Valencia, E.; Cando, E.; Hidalgo, V.; Rodriguez, D. Propulsion Sizing Correlations for Electrical and Fuel Powered Unmanned Aerial Vehicles. Aerospace 2021, 8, 171. [Google Scholar] [CrossRef]
- Ravishankar, R.; Chakravarthy, S.R. Range Equation For a Series Hybrid Electric Aircraft. Presented at the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- De Vries, R.; Brown, M.; Vos, R. Preliminary Sizing Method for Hybrid-Electric Distributed-Propulsion Aircraft. J. Aircr. 2019, 56, 2172–2188. [Google Scholar] [CrossRef]
- Cakin, U.; Kaçan, Z.; Aydogan, Z.A.; Kuvvetli, I. Initial Sizing of Hybrid Electric VTOL Aircraft for Intercity Urban Air Mobility. Presented at the Aiaa Aviation 2020 Forum, VIRTUAL EVENT, 15–19 June 2020. [Google Scholar]
- Zhang, H.; Song, B.; Li, F.; Xuan, J. Multidisciplinary design optimization of an electric propulsion system of a hybrid UAV considering wind disturbance rejection capability in the quadrotor mode. Aerosp. Sci. Technol. 2021, 110, 106372. [Google Scholar] [CrossRef]
- Çakıcı, F.; Leblebicioğlu, M.K. Design and analysis of a mode-switching micro unmanned aerial vehicle. Int. J. Micro Air Veh. 2016, 8, 221–229. [Google Scholar] [CrossRef] [Green Version]
- Gu, H.; Lyu, X.; Li, Z.; Shen, S.; Zhang, F. Development and Experimental Verification of a Hybrid Vertical Take-Off and Landing (VTOL) Unmanned Aerial Vehicle (UAV). In Proceedings of the International Conference on Unmanned Aircraft Systems, ICUAS, Miami, FL, USA, 13–16 June 2017. [Google Scholar]
- Hassanalian, M.; Salazar, R.; Abdelkefi, A. Conceptual design and optimization of a tilt-rotor micro air vehicle. Chin. J. Aeronaut. 2019, 32, 369–381. [Google Scholar] [CrossRef]
- Leishman, G.J. Principles of Helicopter Aerodynamics; Cambridge University Press: New York, NY, USA, 2006. [Google Scholar]
- Stone, R.H. The T-Wing Tail-Sitter Research UAV. Presented at the 2002 Biennial International Powered Lift Conference and Exhibit. Williamsburg, VA, USA, 5–7 November, 2002. [Google Scholar]
- Roskam, J.; Lan, C. Airplane Aerodynamics and Performance; Design, Analysis and Research Corporation: Lawrence, KS, USA, 1997. [Google Scholar]
- Economou, J.T.; Tsourdos, A.; Wang, S. Design of a Distributed Hybrid Electric Propulsion System for a Light Aircraft based on genetic algorithm. Presented at the AIAA Propulsion and Energy 2019 Forum, Indianapolis, IN, USA, 19–22 August 2019. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Min | Max |
|---|---|---|
| Electric Motor Efficiency | 0.86 | 0.98 |
| ICE Efficiency | 0.2 | 0.4 |
| Generator Efficiency | 0.86 | 0.98 |
| Battery Efficiency | 0.8 | 0.99 |
| Battery Power Density (kW/kg) | 0.35 | 0.8 |
| Battery Energy Density (Wh/kg) | 151 | 260 |
| ICE Power Density (kW/kg) | 0.25 | 3 |
| Electric Motor Power Density (kW/kg) | 3 | 5 |
| Minimize | Design Variables | Constraints |
|---|---|---|
| MTOM, cost, fuel mass… | Maximum output power of propulsion components, wing area… | Performance, aerodynamic characteristics, mechanical characteristics, and stability… |
| Performance | Value |
|---|---|
| Cruise speed | 30 m/s |
| ROC | 3 m/s |
| Service ceiling | 1000 m |
| Stall speed | 12.5 m/s |
| Payload | 10 kg |
| Cases | Takeoff Altitude (m) | Cruise Distance (km) |
|---|---|---|
| Case 1 | 500 | 30 |
| Case 2 | 1500 | 100 |
| Case 3 | 3000 | 500 |
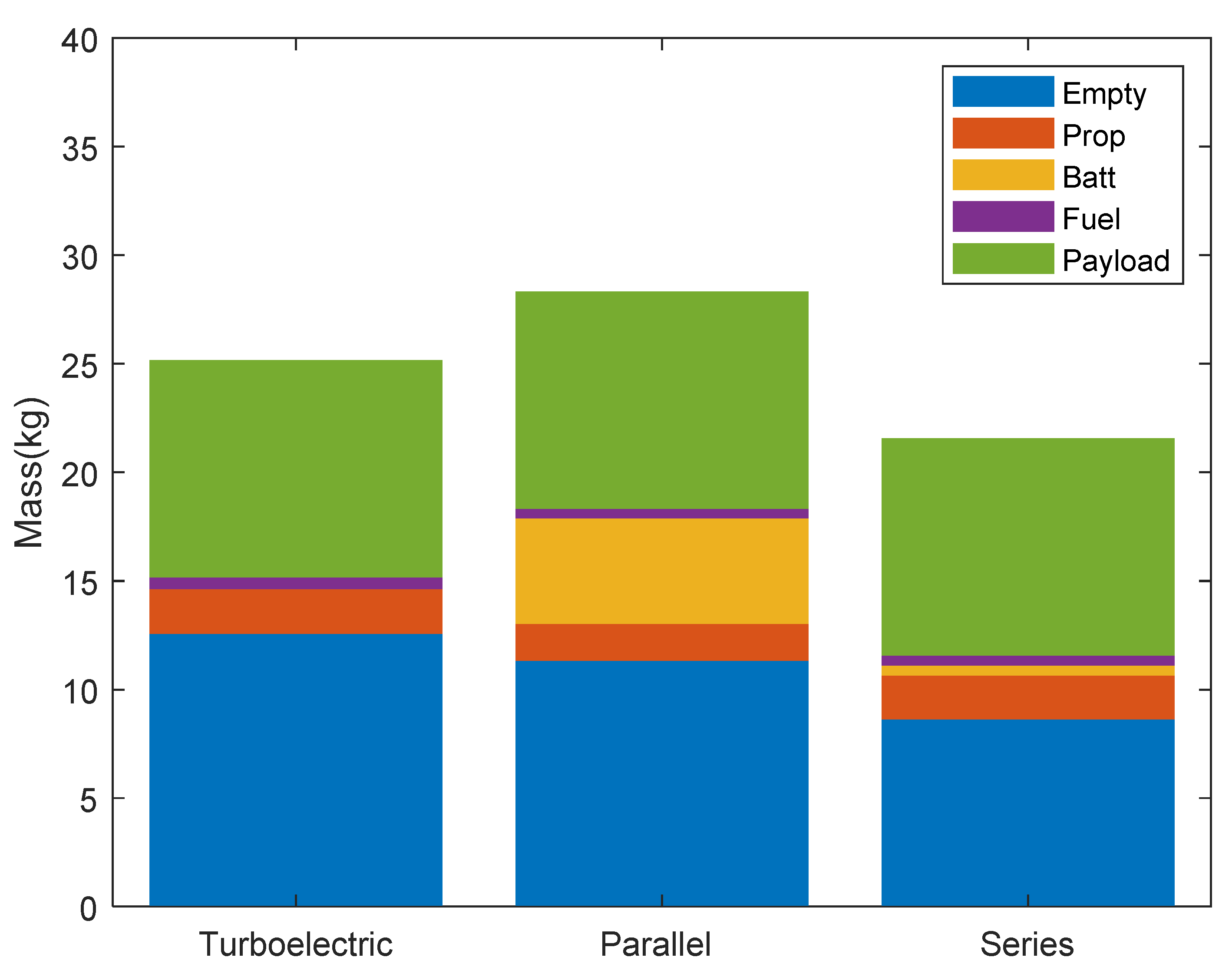
| Types | Case 1 | Case 2 | Case 3 | |||
|---|---|---|---|---|---|---|
| MTOM (kg) | Fuel (kg) | MTOM (kg) | Fuel (kg) | MTOM (kg) | Fuel (kg) | |
| All electric | 41.35 | 0 | / | / | / | / |
| Series hybrid | 20.89 | 0.135 | 21.57 | 0.45 | 26.34 | 2.34 |
| Parallel hybrid | 23.98 | 0.11 | 28.32 | 0.45 | / | / |
| Turboelectric | 24.26 | 0.156 | 25.16 | 0.52 | 30.54 | 2.73 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zong, J.; Zhu, B.; Hou, Z.; Yang, X.; Zhai, J. Evaluation and Comparison of Hybrid Wing VTOL UAV with Four Different Electric Propulsion Systems. Aerospace 2021, 8, 256. https://doi.org/10.3390/aerospace8090256
Zong J, Zhu B, Hou Z, Yang X, Zhai J. Evaluation and Comparison of Hybrid Wing VTOL UAV with Four Different Electric Propulsion Systems. Aerospace. 2021; 8(9):256. https://doi.org/10.3390/aerospace8090256
Chicago/Turabian StyleZong, Jianan, Bingjie Zhu, Zhongxi Hou, Xixiang Yang, and Jiaqi Zhai. 2021. "Evaluation and Comparison of Hybrid Wing VTOL UAV with Four Different Electric Propulsion Systems" Aerospace 8, no. 9: 256. https://doi.org/10.3390/aerospace8090256
APA StyleZong, J., Zhu, B., Hou, Z., Yang, X., & Zhai, J. (2021). Evaluation and Comparison of Hybrid Wing VTOL UAV with Four Different Electric Propulsion Systems. Aerospace, 8(9), 256. https://doi.org/10.3390/aerospace8090256