_Zhu.png)
Mixed-Sensitivity Control for Drag-Free Spacecraft Based on State Space

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Model Building
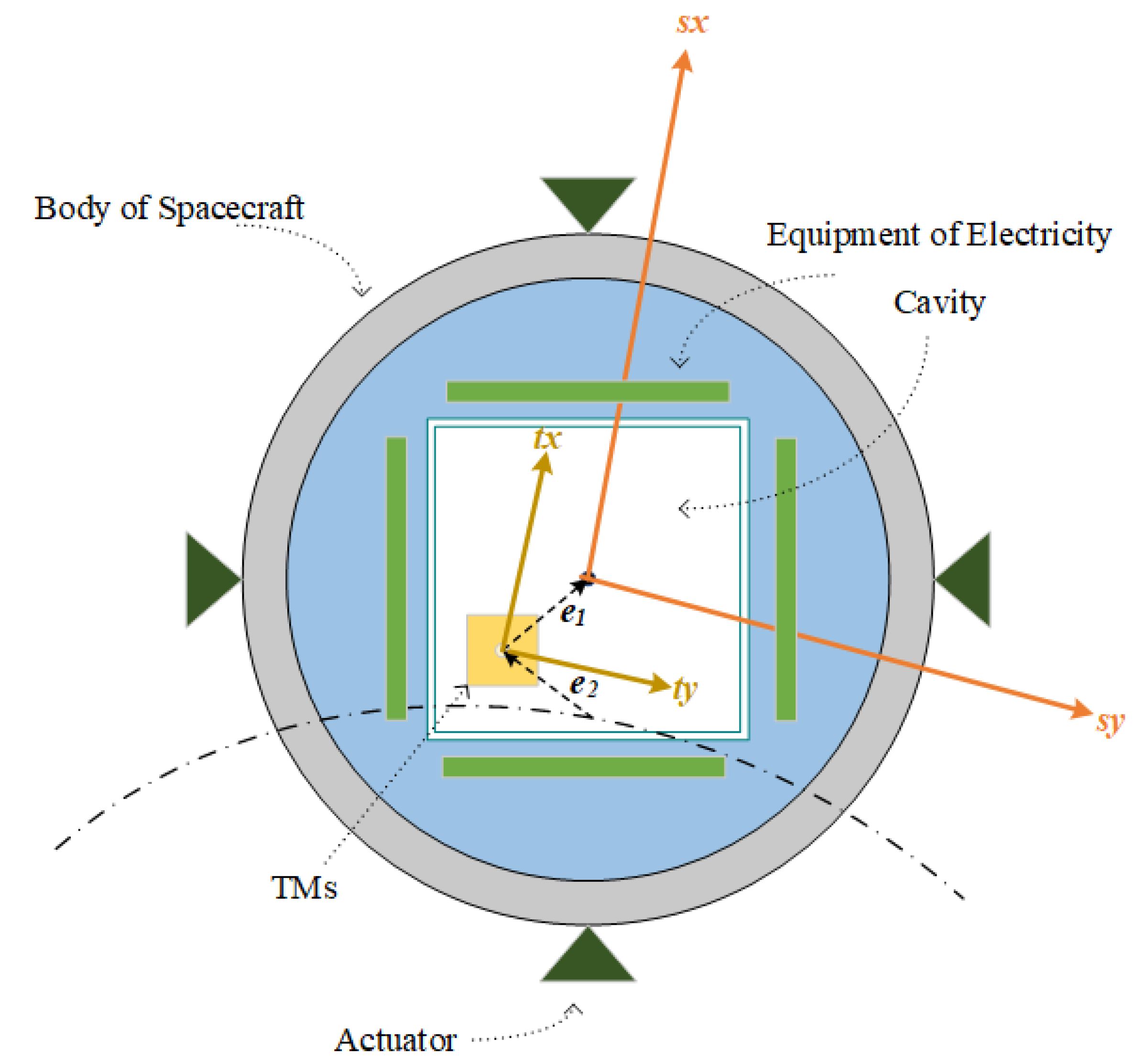
2.1. Reference Coordinate System
- The earth inertial reference coordinate system (IRS): The origin of coordinates is located at the center of the earth. ix-axis points to the vernal equinox, and the iz-axis is directed toward the n-pole. The iy-axis follows the right-handed rule.
- The ideal orbit reference coordinate system (ORS): The origin of the coordinates is located at the ideal orbit. The ix-axis points to the opposite direction of the center of the earth. The iy-axis coincides with the velocity vector direction of the spacecraft. They are located in the orbital plane. The iz-axis follows the right-handed rule.
- The spacecraft body reference coordinate system (SRS): The coordinate axes are parallel to the ORS, but the origin of the coordinates is located at the center of the cavity.
- The TMs reference coordinate system (TRS): The coordinate axes are parallel to the ORS, but the origin of the coordinates is located at the mass center of the TMs.
2.2. Problem Modeling
- (1)
- The mode of displacement: The relative displacement is measured directly, and the signal is transferred to the control system of drag-free in order to offset disturbance.
- (2)
- The mode of accelerometer: The displacement due to disturbance is offset by the control system of electrostatic suspension; then, the control system of drag-free adjusts the body position according to the reaction force.
2.3. Dynamics Modeling
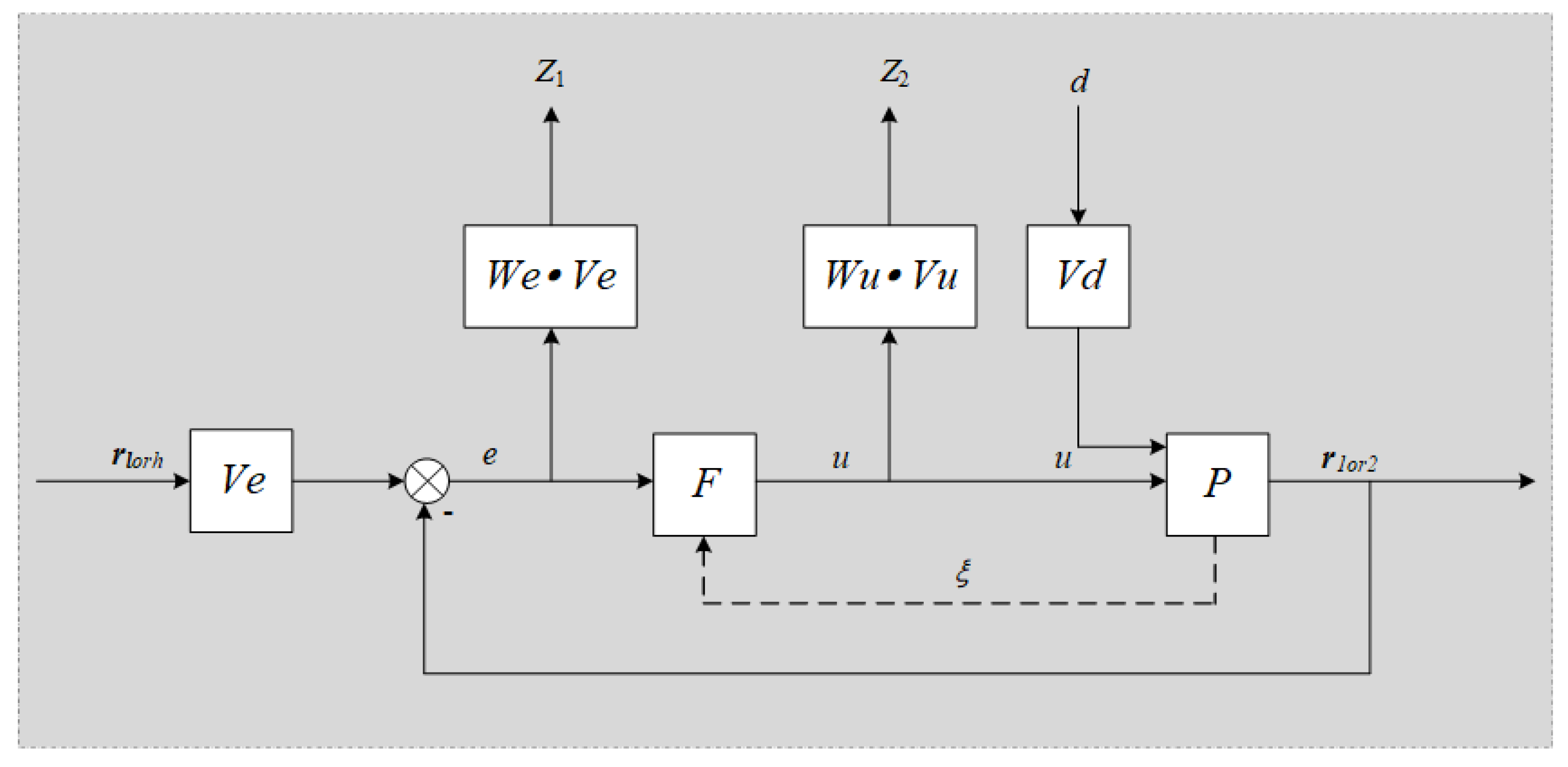
3. Controllers Designing
3.1. Weight Selection
3.2. Gain Matrix
3.2.1. Drag-Free
3.2.2. Electrostatic Suspension
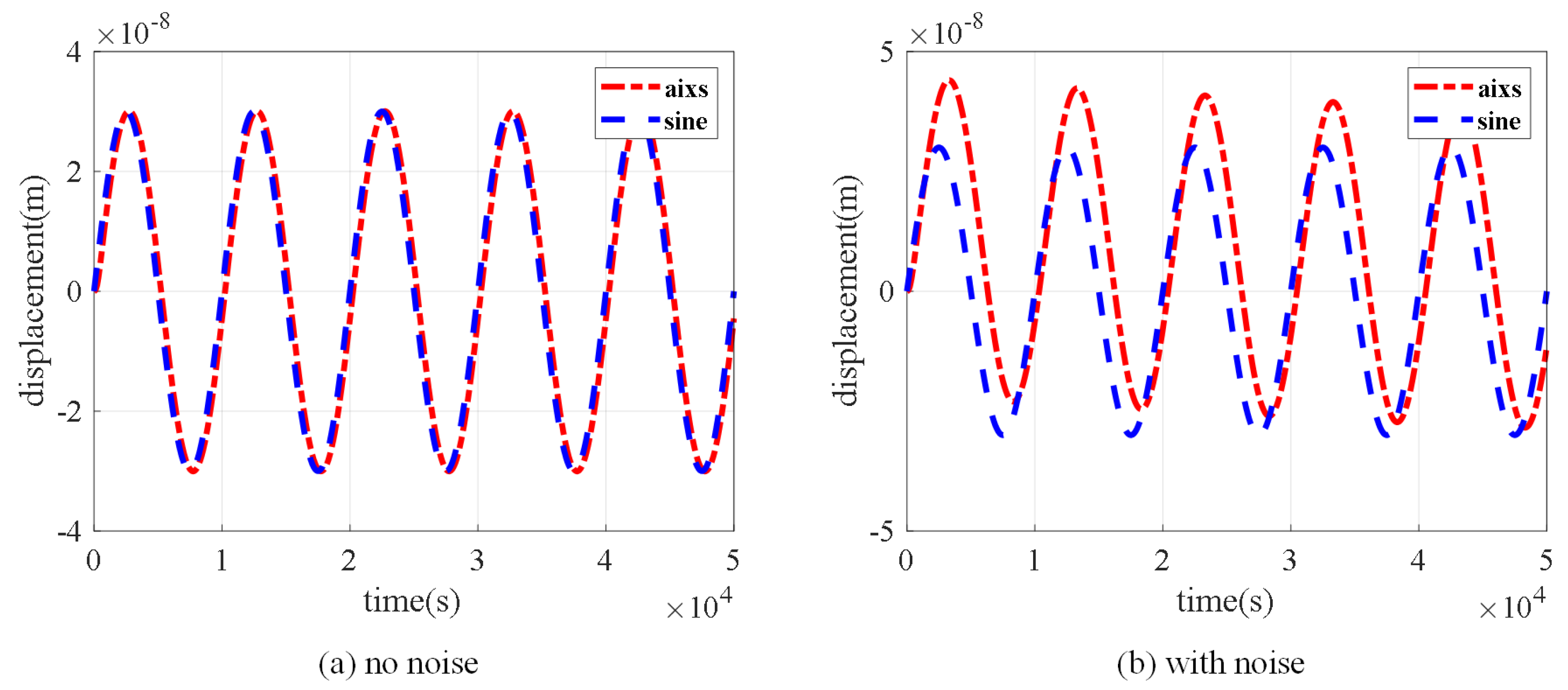
4. Simulation and Discuss
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Reigber, C.; Lühr, H.; Schwintzer, P. CHAMP mission status. Adv. Space Res. 2002, 30, 129–134. [Google Scholar] [CrossRef]
- Michaelis, I.; Styp-Rekowski, K.; Rauberg, J.; Stolle, C.; Korte, M. Geomagnetic data from the GOCE satellite mission. Earth Planets Space. 2022, 74, 1–16. [Google Scholar] [CrossRef]
- Cesare, S.; Allasio, A.; Anselmi, A.; Dionisio, S.; Mottini, S.; Parisch, M.; Massotti, L.; Silvestrin, P. The European way to gravimetry: From GOCE to NGGM. Adv. Space Res. 2016, 57, 1047–1064. [Google Scholar] [CrossRef]
- Pelivan, I. Dynamics and control modeling for gravity probe B. Space Sci. Rev. 2010, 151, 5–23. [Google Scholar] [CrossRef]
- Overduin, J.; Everitt, F.; Mester, J.; Worden, P. The science case for STEP. Adv. Space Res. 2009, 43, 1532–1537. [Google Scholar] [CrossRef]
- Bergé, J.; Baghi, Q.; Hardy, E.; Métris, G.; Robert, A.; Rodrigues, M.; Touboul, P.; Chhun, R.; Guidotti, P.-Y.; Pires, S.; et al. MICROSCOPE mission: Data analysis principle. Class. Quant. Grav. 2022, 39, 204007. [Google Scholar] [CrossRef]
- Abbott, B.P.; Abbott, R.; Abbott, T.D.; Abernathy, M.R.; Acernese, F.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; et al. Observation of gravitational waves from a binary black hole merger. Phys. Rev. Lett. 2016, 116, 061102. [Google Scholar] [CrossRef] [Green Version]
- Amaro Seoane, P.; Arca Sedda, M.; Babak, S.; Berry, C.P.; Berti, E.; Bertone, G.; Blas, D.; Bogdanović, T.; Bonetti, M.; Breivik, K.; et al. The effect of mission duration on LISA science objectives. Gen. Relativ. Gravit. 2022, 54, 1–47. [Google Scholar] [CrossRef]
- Luo, J.; Chen, L.S.; Duan, H.Z.; Gong, Y.G.; Hu, S.; Ji, J.; Liu, Q.; Mei, J.; Milyukov, V.; Sazhin, M.; et al. TianQin: A space-borne gravitational wave detector. Class. Quant. Grav. 2016, 33, 035010. [Google Scholar] [CrossRef] [Green Version]
- Lange, B. The drag-free satellite. AIAA J. 1964, 2, 1590–1606. [Google Scholar] [CrossRef]
- Space Department of Johns Hopkins Universitythe GuidanceControl Laboratory of Stanford University. A satellite free of all but gravitational forces: “TRIAD I”. J. Spacecr. Rocket. 1974, 11, 637–644. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Castelli, E.; Cavalleri, A.; Cesarini, A.; Cruise, A.M.; et al. LISA Pathfinder platform stability and drag-free performance. Phys Rev. D 2019, 99, 082001. [Google Scholar] [CrossRef] [Green Version]
- Hu, Z.; Wang, P.; Deng, J.; Cai, Z.; Wang, Z.; Wang, Z.; Yu, J.; Wu, Y.; Kang, Q.; Li, H.; et al. The drag-free control design and in-orbit experimental results of “Taiji-1”. Int. J. Mod. Phys. A 2021, 36, 2140019. [Google Scholar] [CrossRef]
- Leach, R. Development of hardware for a drag-free control system/Gravitational-Wave Detection. SPIE 2003, 4856, 19–30. [Google Scholar]
- Wu, S.F.; Fertin, D. Spacecraft drag-free attitude control system design with quantitative feedback theory. Acta Astronaut. 2008, 62, 668–682. [Google Scholar] [CrossRef]
- Zou, X. Calibration of the Satellite Gravity Gradients for GOCE and Analysis on Its Drag Free Control System. Acta Geod. Cartogr. Sin. 2018, 47, 291. [Google Scholar]
- Gath, P.; Fichter, W.; Kersten, M.; Schleicher, A. Drag Free and Attitude Control System Design for the LISA Pathfinder Mission. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004; p. 5430. [Google Scholar]
- Wang, E.; Qiu, S.; Liu, M.; Cao, X. Event-triggered adaptive terminal sliding mode tracking control for drag-free spacecraft inner-formation with full state constraints. Aerosp. Sci. Technol. 2022, 124, 107524. [Google Scholar] [CrossRef]
- Lian, X.; Zhang, J.; Chang, L.; Song, J.; Sun, J. Test mass capture for drag-free satellite based on RBF neural network adaptive sliding mode control. Adv. Space Res. 2022, 69, 1205–1219. [Google Scholar] [CrossRef]
- Zou, K.; Gou, X. Characteristic model-based all-coefficient adaptive control of the drag-free satellites//2020 Chinese Automation Congress (CAC). Shanghai, China, 6–8 November 2020; 2020; pp. 2839–2844. [Google Scholar]
- Huang, W. Single Mass Drag-Free Control Based on the High-Gain Observer, 3rd ed.; Harbin Institute of Technology: Harbin, China, 2021; pp. 21–35. [Google Scholar]
- Fichter, W.; Schleicher, A.; Szerdahelyi, L.; Theil, S.; Airey, P. Drag-free control system for frame dragging measurements based on cold atom interferometry. Acta Astronaut. 2005, 57, 788–799. [Google Scholar] [CrossRef]
- Canuto, E.; Colangelo, L.; Buonocore, M.; Massotti, L.; Girouart, B. Orbit and formation control for low-earth-orbit gravimetry drag-free satellites. Proc. Inst. Mech. Eng. Part J. Aerosp. Eng. 2015, 229, 1194–1213. [Google Scholar] [CrossRef] [Green Version]
- Lian, X.; Zhang, J.; Wang, J.; Wang, P.; Lu, Z. State and disturbance estimation for test masses of drag-free satellites based on self-recurrent wavelet neural network. Adv. Space Res. 2021, 67, 3654–3666. [Google Scholar] [CrossRef]
- Wang, E.; Zhang, J.; Li, H.; Liu, M. Relative Position Model Predictive Control of Double Cube Test-Masses Drag-Free Satellite with Extended Sliding Mode Observer. Math. Probl. Eng. 2021, 2021, 1–15. [Google Scholar] [CrossRef]
- Tan, S.; Guo, J.; Zhao, Y.; Zhang, J. Adaptive control with saturation-constrainted observations for drag-free satellites—A set-valued identification approach. Sci. China Inform. Sci. 2021, 64, 1–12. [Google Scholar] [CrossRef]
- Lian, X.; Zhang, J.; Lu, L.; Wang, J.; Liu, L.; Sun, J.; Sun, Y. Frequency separation control for drag-free satellite with frequency-domain constraints. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 4085–4096. [Google Scholar] [CrossRef]
- Theis, J.; Pfifer, H. Observer-based synthesis of linear parameter-varying mixed sensitivity controllers. Int. J. Robust. Nonlin. 2020, 30, 5021–5039. [Google Scholar] [CrossRef]
- Theis, J.; Sedlmair, N.; Thielecke, F.; Pfifer, H. Observer-based LPV control with anti-windup compensation: A flight control example. IFAC-PapersOnLine 2020, 53, 7325–7330. [Google Scholar] [CrossRef]
- Wu, F. Control of Linear Parameter Varying Systems, 3rd ed.; University of California: Berkeley, CA, UDA, 1995; pp. 31–50. [Google Scholar]
- Theis, J.; Pfifer, H.; Seiler, P. Robust modal damping control for active flutter suppression. J. Guid. Control. Dynam. 2020, 43, 1056–1068. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Jiang, C. Mixed-Sensitivity Control for Drag-Free Spacecraft Based on State Space. Aerospace 2022, 9, 708. https://doi.org/10.3390/aerospace9110708
Liu Y, Jiang C. Mixed-Sensitivity Control for Drag-Free Spacecraft Based on State Space. Aerospace. 2022; 9(11):708. https://doi.org/10.3390/aerospace9110708
Chicago/Turabian StyleLiu, Yuan, and Changwu Jiang. 2022. "Mixed-Sensitivity Control for Drag-Free Spacecraft Based on State Space" Aerospace 9, no. 11: 708. https://doi.org/10.3390/aerospace9110708
APA StyleLiu, Y., & Jiang, C. (2022). Mixed-Sensitivity Control for Drag-Free Spacecraft Based on State Space. Aerospace, 9(11), 708. https://doi.org/10.3390/aerospace9110708