
Research on Landing Stability of Four-Legged Adaptive Landing Gear for Multirotor UAVs


Abstract
:1. Introduction
2. Dynamic Modeling of Adaptive Landing Gear
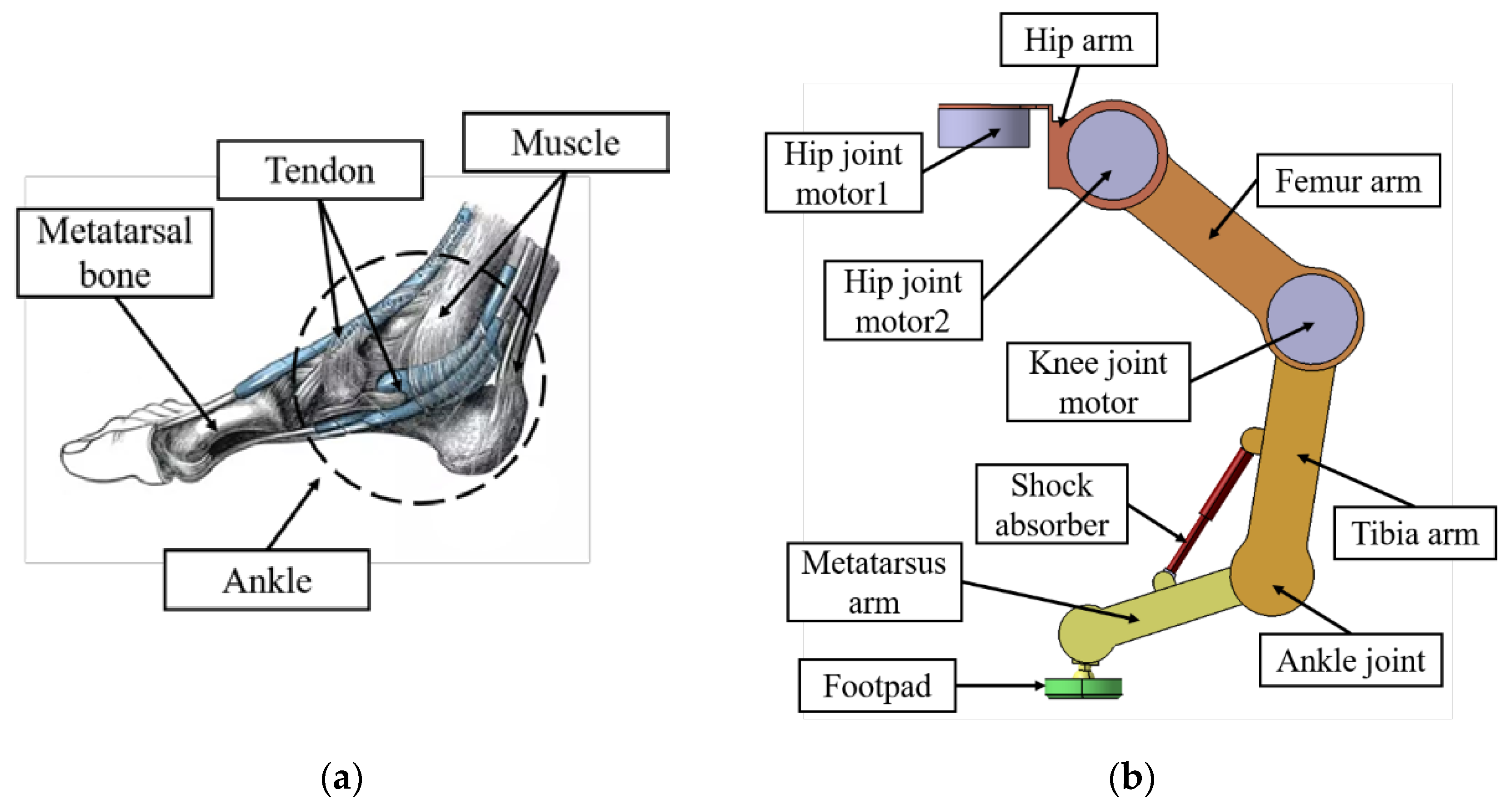
2.1. Structure Design
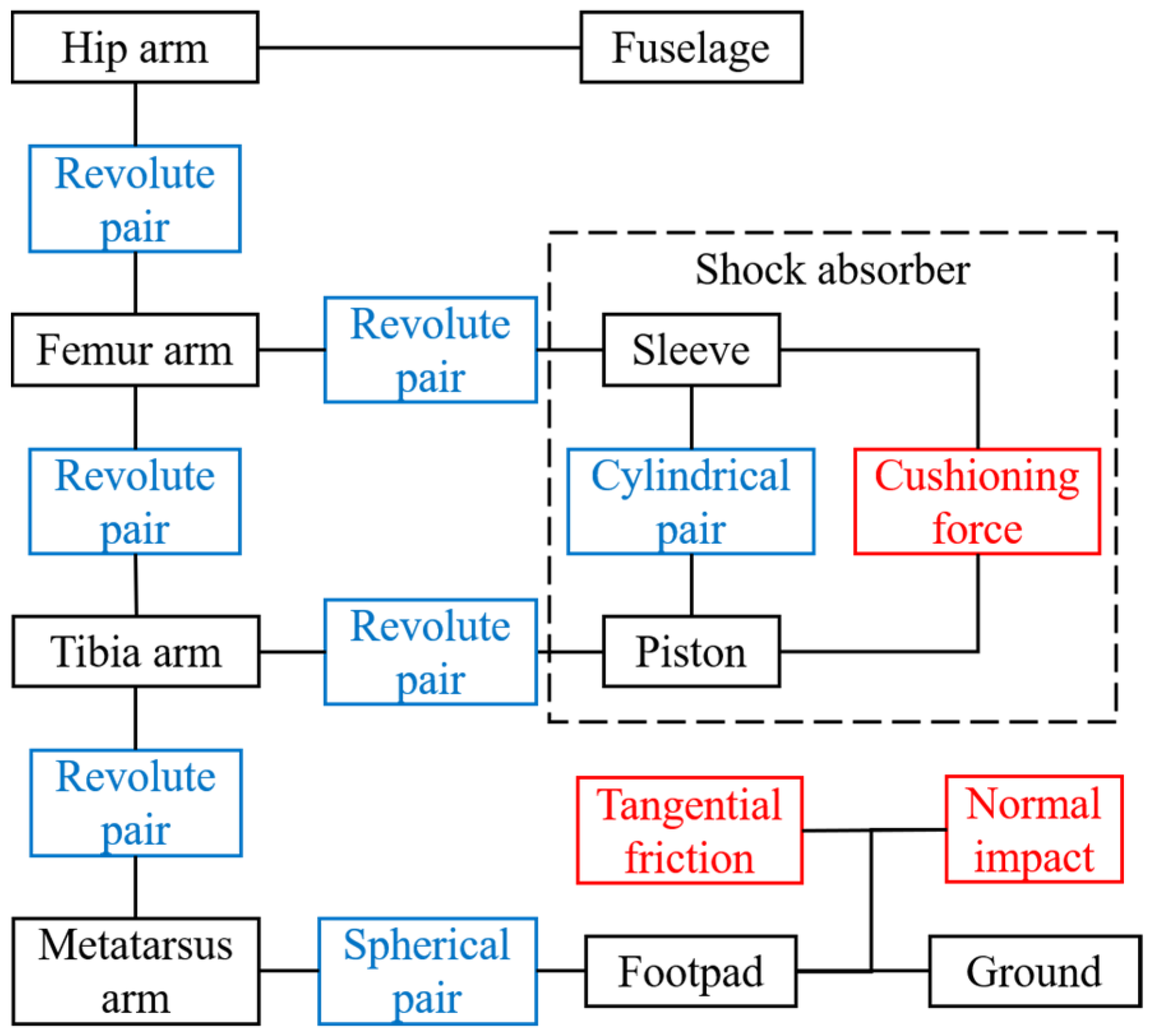
2.2. Dynamic Modeling
3. Drop Test Simulation of Adaptive Landing Gear
3.1. Control Strategy of Adaptive Landing Gear Adjustment
3.2. Simulation Analysis of Seismic Drops
4. Research on Landing Stability
4.1. Landing Stability Criterion
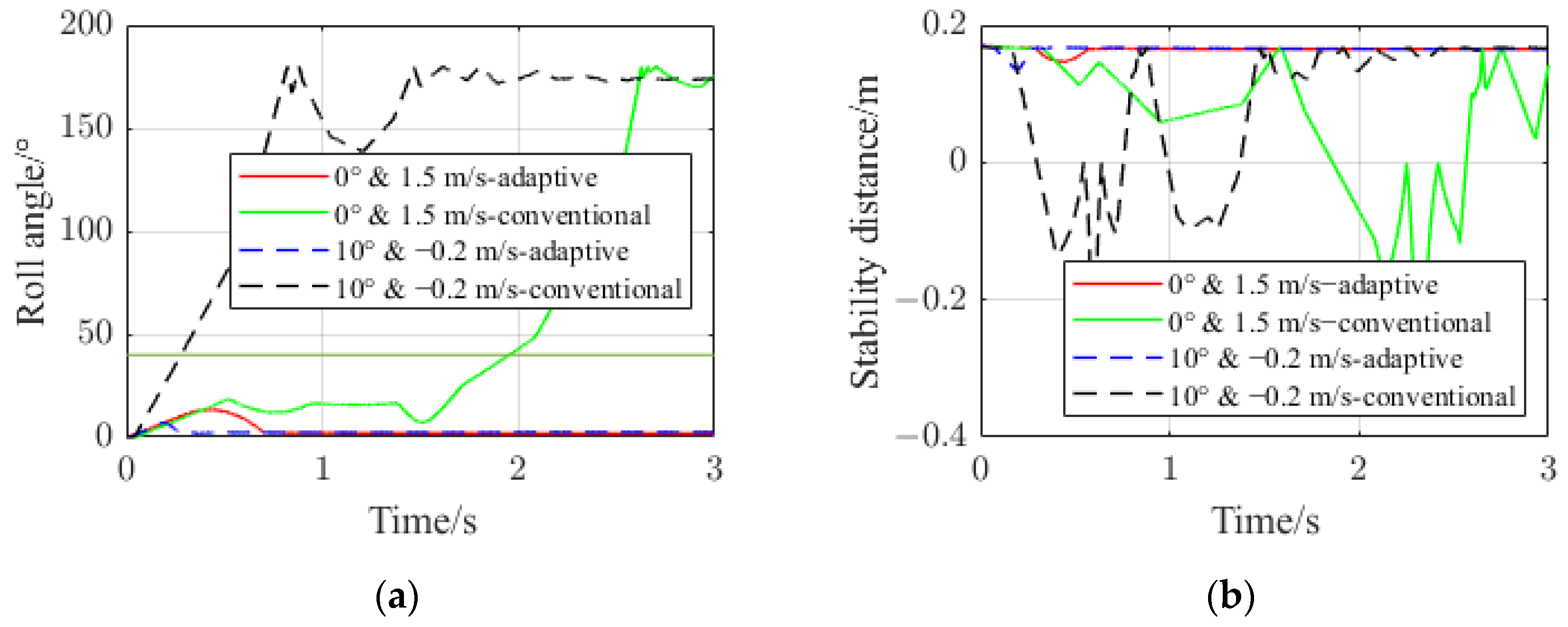
4.2. Landing Stability Simulation
- Slope angle , horizontal speed ;
- Slope angle , horizontal speed .
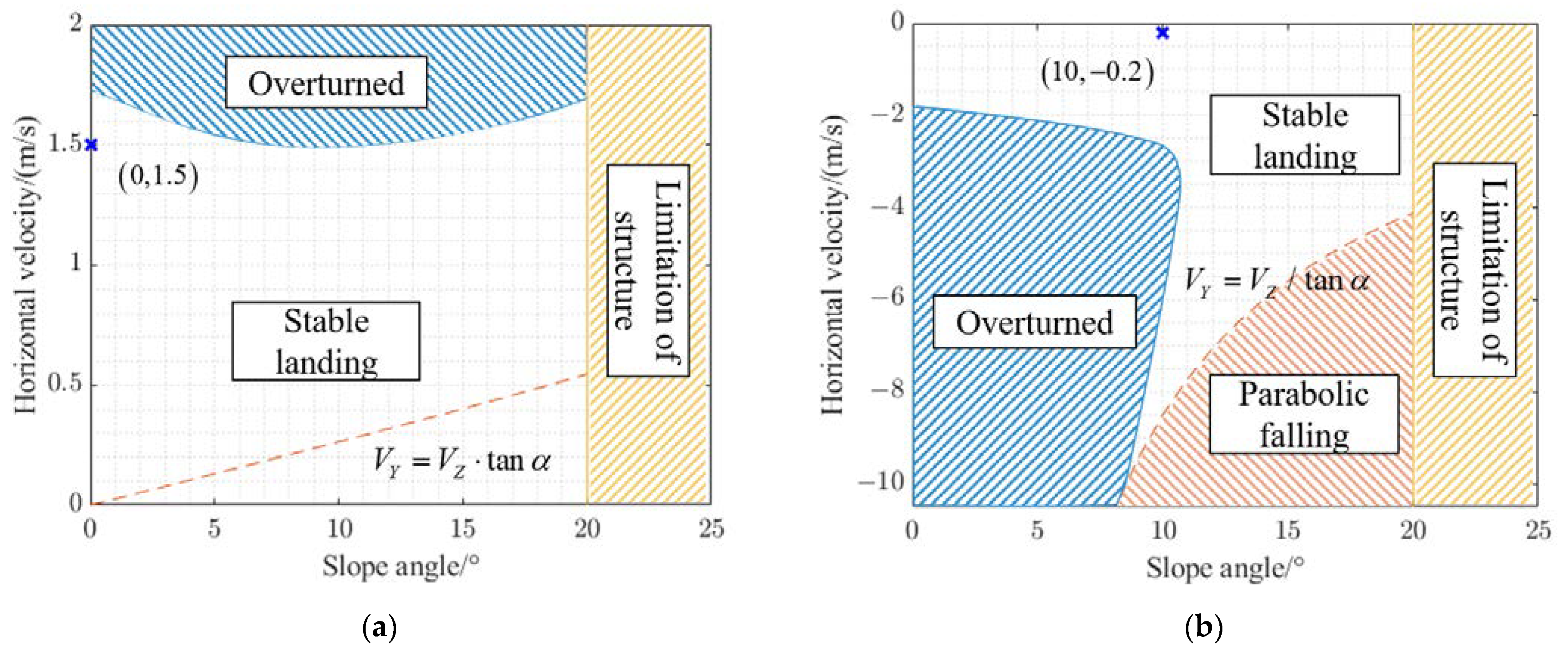
4.3. Landing Stability Boundary
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xin, H.B. Design and analysis of retractable structure of new quadrotor landing gear. Proc. J. Phys. Conf. Ser. 2021, 1750, 012022. [Google Scholar] [CrossRef]
- Tang, H.; Tian, C.; Zhang, D. A Novel Terrain Adaptive Landing Gear Robot. Proc. J. Phys. Conf. Ser. 2021, 1924, 012021. [Google Scholar] [CrossRef]
- Boix, D.M.; Goh, K.; McWhinnie, J. Modelling and control of helicopter robotic landing gear for uneven ground conditions. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linköping, Sweden, 3–5 October 2017; pp. 60–65. [Google Scholar] [CrossRef] [Green Version]
- Stolz, B.; Brödermann, T.; Castiello, E.; Englberger, G.; Erne, D.; Gasser, J.; Hayoz, E.; Müller, S.; Muhlebach, L.; Löw, T. An adaptive landing gear for extending the operational range of helicopters. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1757–1763. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Zhang, D.; Wu, C.; Tang, H.; Tian, C. A multi-finger robot system for adaptive landing gear and aerial manipulation. Robot. Auton. Syst. 2021, 146, 103878. [Google Scholar] [CrossRef]
- Roderick, W.R.; Cutkosky, M.R.; Lentink, D. Bird-inspired dynamic grasping and perching in arboreal environments. Science Robotics 2021, 6, eabj7562. [Google Scholar] [CrossRef] [PubMed]
- Hang, K.; Lyu, X.; Song, H.; Stork, J.A.; Dollar, A.M.; Kragic, D.; Zhang, F. Perching and resting—A paradigm for UAV maneuvering with modularized landing gears. Sci. Robot. 2019, 4, eaau6637. [Google Scholar] [CrossRef] [PubMed]
- Black, R.J. Quadrupedal landing gear systems for spacecraft. J. Spacecr. Rocket. 1964, 1, 196–203. [Google Scholar] [CrossRef]
- Witte, L.; Roll, R.; Biele, J.; Ulamec, S.; Jurado, E. Rosetta lander Philae–Landing performance and touchdown safety assessment. Acta Astronaut. 2016, 125, 149–160. [Google Scholar] [CrossRef]
- Roll, R.; Witte, L. ROSETTA lander Philae: Touch-down reconstruction. Planet. Space Sci. 2016, 125, 12–19. [Google Scholar] [CrossRef]
- Yang, J.; Zeng, F.; Man, J.; Zhu, J. Design and verification of the landing impact attenuation system for Chang’ E-3 lander. Sci. Sin. Technol. 2014, 44, 440–449. [Google Scholar] [CrossRef]
- Lin, Q.; Nie, H.; Chen, J.; Wan, J. Notice of Retraction: Research on stability of lunar lander soft landing based on flexible models. In Proceedings of the 2010 International Conference on Computer Application and System Modeling (ICCASM 2010), Taiyuan, China, 22–24 October 2010; pp. V1-439–V431-443. [Google Scholar] [CrossRef]
- Wei, X.; Lin, Q.; Nie, H.; Zhang, M.; Ren, J. Investigation on soft-landing dynamics of four-legged lunar lander. Acta Astronaut. 2014, 101, 55–66. [Google Scholar] [CrossRef]
- Luo, C.; Deng, Z.; Liu, R.; Wang, C. Landing Stability Investigation of Legged-type Spacecraft Lander Based on Zero Moment Point Theory. J. Mech. Eng. 2010, 46, 38–45. [Google Scholar] [CrossRef]
- Li, K.; Liu, R.Q.; Deng, Z.Q.; Jiang, S.Y. Research on the lander stability during lunar rover unloading base on the theory of ZMP. Proc. Adv. Mater. Res. 2012, 457, 1264–1270. [Google Scholar] [CrossRef]
- Ji, Q.; Qian, Z.; Ren, L.; Ren, L. Torque Curve Optimization of Ankle Push-Off in Walking Bipedal Robots Using Genetic Algorithm. Sensors 2021, 21, 3435. [Google Scholar] [CrossRef] [PubMed]
- Geng, T.; Porr, B.; Wörgötter, F. Fast biped walking with a sensor-driven neuronal controller and real-time online learning. Int. J. Robot. Res. 2006, 25, 243–259. [Google Scholar] [CrossRef]
- Wang, G.; Ma, D.; Liu, Y.; Liu, C. Research progress of contact force models in the collision mechanics of multibody system. Chin. J. Theor. Appl. Mech. 2022, 54, 1–28. (In Chinese) [Google Scholar] [CrossRef]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and comparison of dry friction force models. Nonlinear dynamics 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- Thomsen, J.J.; Fidlin, A. Analytical approximations for stick–slip vibration amplitudes. Int. J. Non-Linear Mech. 2003, 38, 389–403. [Google Scholar] [CrossRef]
- Wang, R.; Qu, H.; Wang, Z.; Wang, M.; Xu, G. Overall Layout and Key Parameters Optimization of Landing Legs of the reusable Launch Vehicle. J. Astronaut. 2022, 43, 1010–1018. (In Chinese) [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Number | Mass (Each)/kg |
|---|---|---|
| Fuselage | 1 | 16 |
| Hip arm | 4 | 0.2 |
| Femur arm | 4 | 0.4 |
| Tibia arm | 4 | 0.4 |
| Metatarsus arm | 4 | 0.3 |
| Shock absorber | 4 | 0.1 |
| Footpad | 4 | 0.1 |
| Motor | 12 | 0.9 |
| Total | 32.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, X.; Yin, Q.; Wei, X.; Zhong, P.; Nie, H. Research on Landing Stability of Four-Legged Adaptive Landing Gear for Multirotor UAVs. Aerospace 2022, 9, 776. https://doi.org/10.3390/aerospace9120776
Ni X, Yin Q, Wei X, Zhong P, Nie H. Research on Landing Stability of Four-Legged Adaptive Landing Gear for Multirotor UAVs. Aerospace. 2022; 9(12):776. https://doi.org/10.3390/aerospace9120776
Chicago/Turabian StyleNi, Xinlei, Qiaozhi Yin, Xiaohui Wei, Peilin Zhong, and Hong Nie. 2022. "Research on Landing Stability of Four-Legged Adaptive Landing Gear for Multirotor UAVs" Aerospace 9, no. 12: 776. https://doi.org/10.3390/aerospace9120776
APA StyleNi, X., Yin, Q., Wei, X., Zhong, P., & Nie, H. (2022). Research on Landing Stability of Four-Legged Adaptive Landing Gear for Multirotor UAVs. Aerospace, 9(12), 776. https://doi.org/10.3390/aerospace9120776