

Helicopter Rescue for Flood Disaster: Scheduling, Simulation, and Evaluation


Abstract
:1. Introduction
2. Related Work
2.1. Mathematical Models for Emergency Rescue
2.2. Simulation Methods for Emergency Rescue
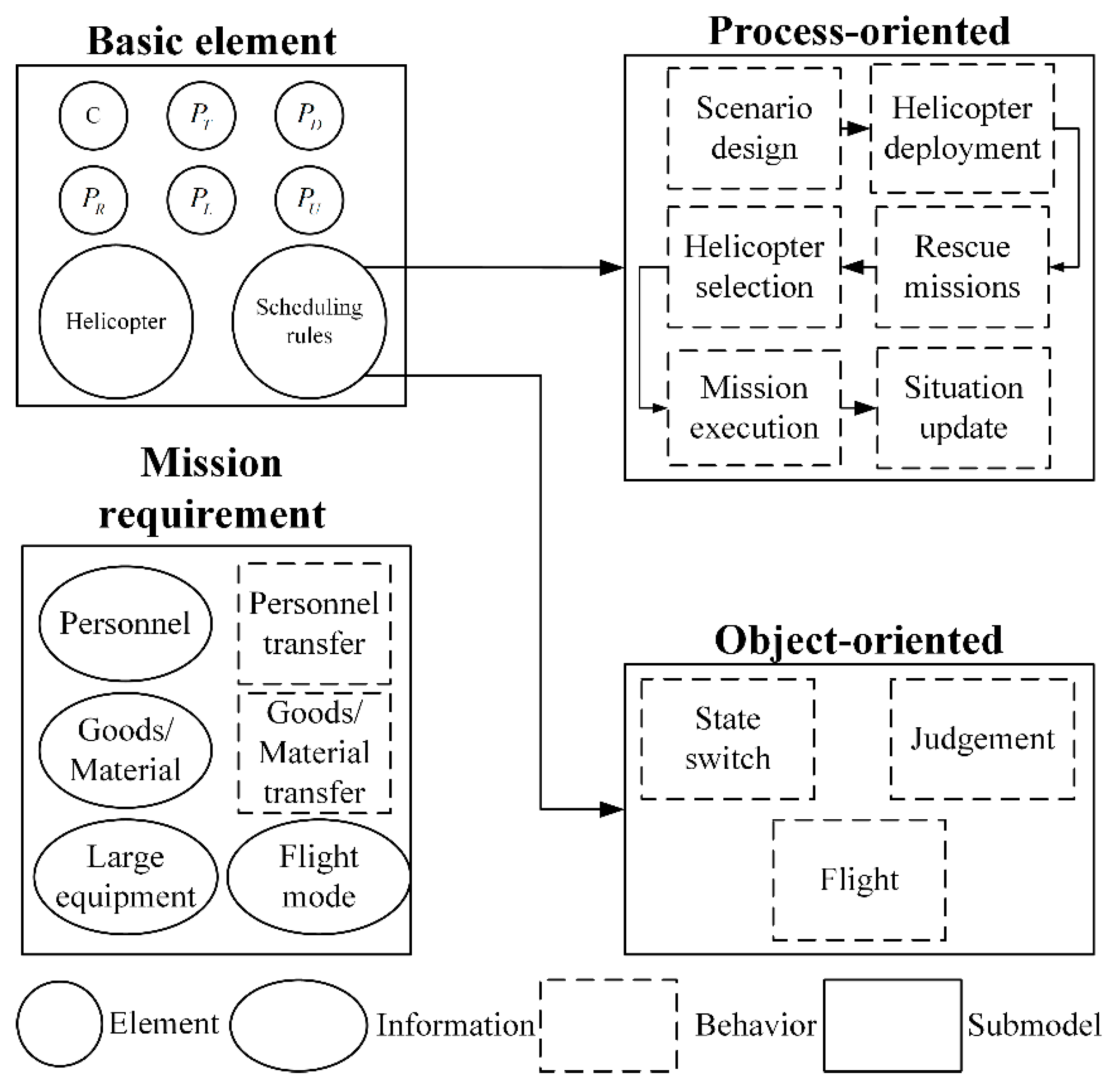
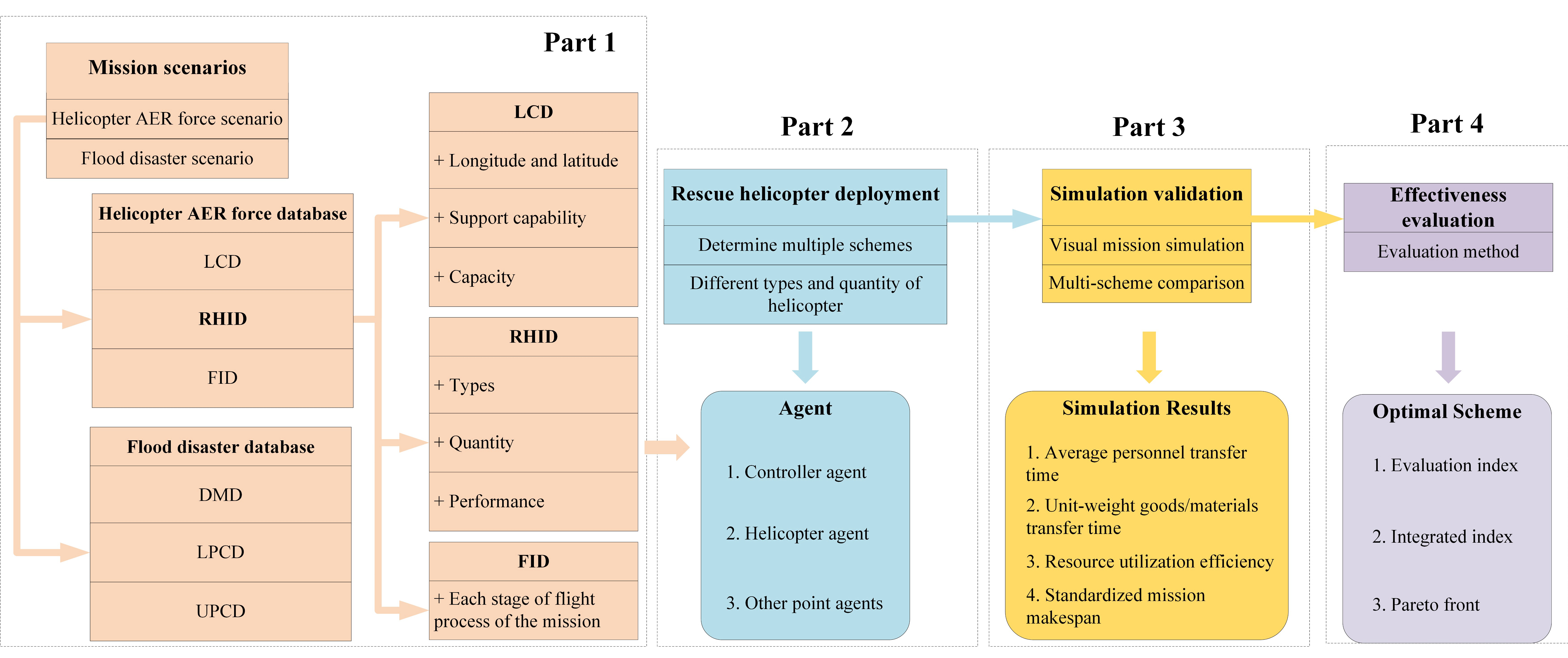
3. Conceptual Model of Helicopter AER Scheduling
3.1. Top-Level Structure of Conceptual Model
- 1.
- Command-and-control center ()
- 2.
- Temporary take-off/landing point ()
- 3.
- Mission demand point ()
- 4.
- Resettlement point ()
- 5.
- Helicopter loading point () & unloading point ()
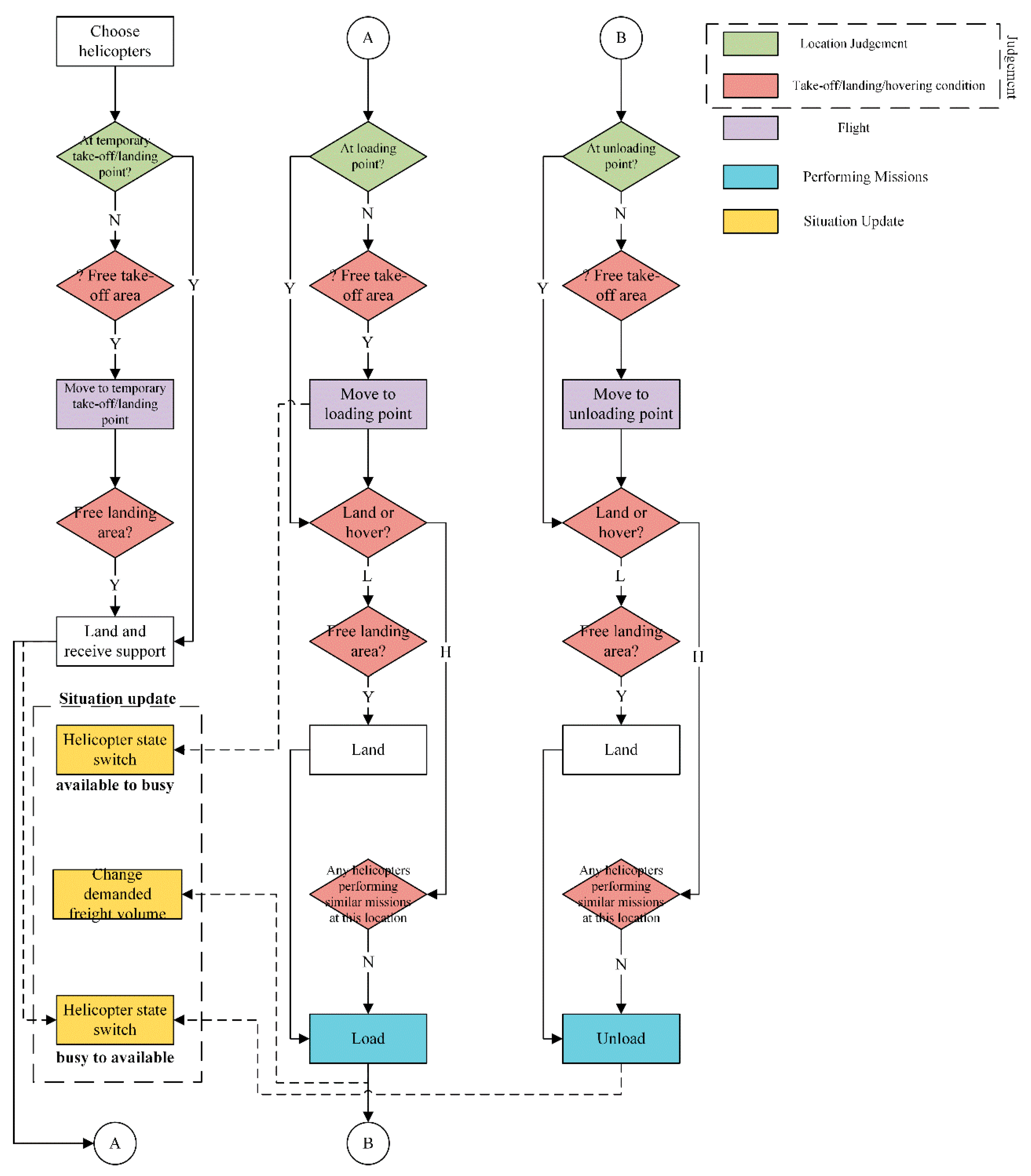
3.2. Scheduling Rules
- 6.
- Process-oriented scheduling rules
- 7.
- Object-oriented scheduling rules (shown in Figure 3)
- 8.
- Location judgment
- 9.
- Take-off/landing/hovering conditions.
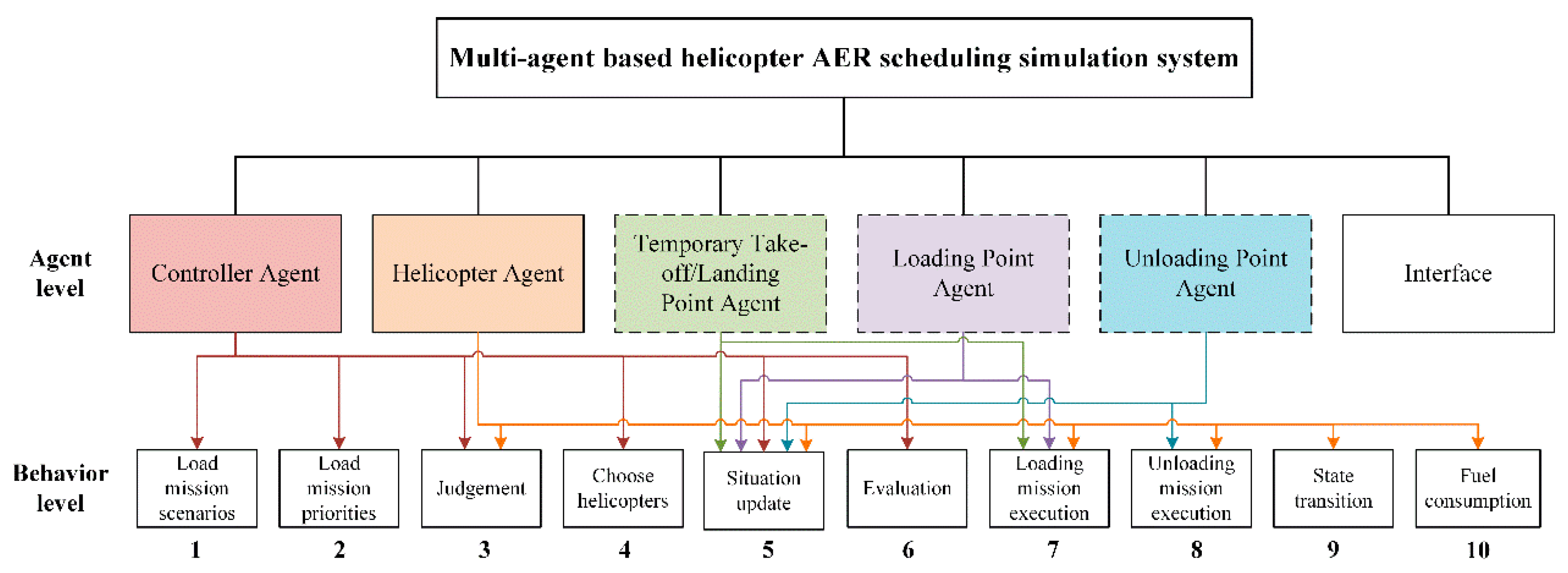
4. Simulation System of Helicopter AER Scheduling
4.1. Simulation System Composition and Structure
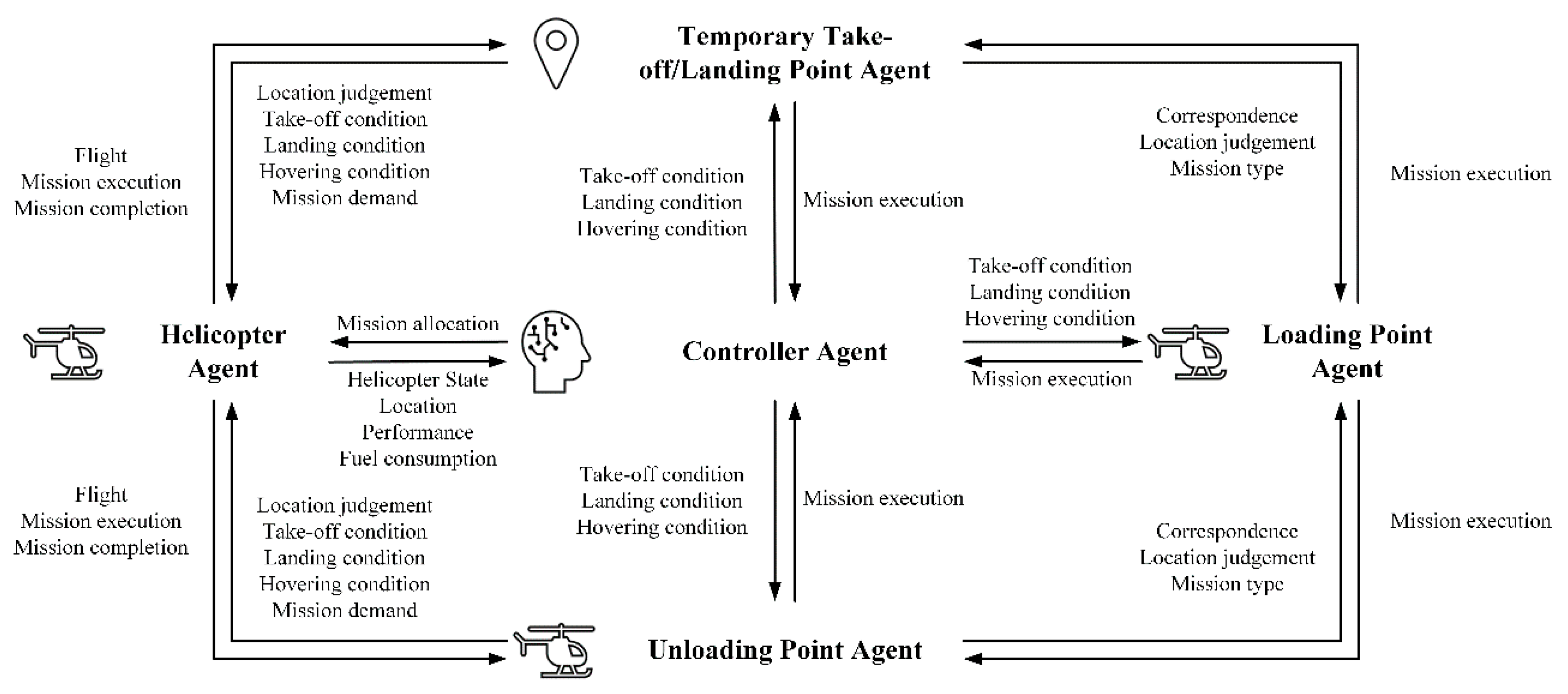
4.2. Agent Behavior and Logic
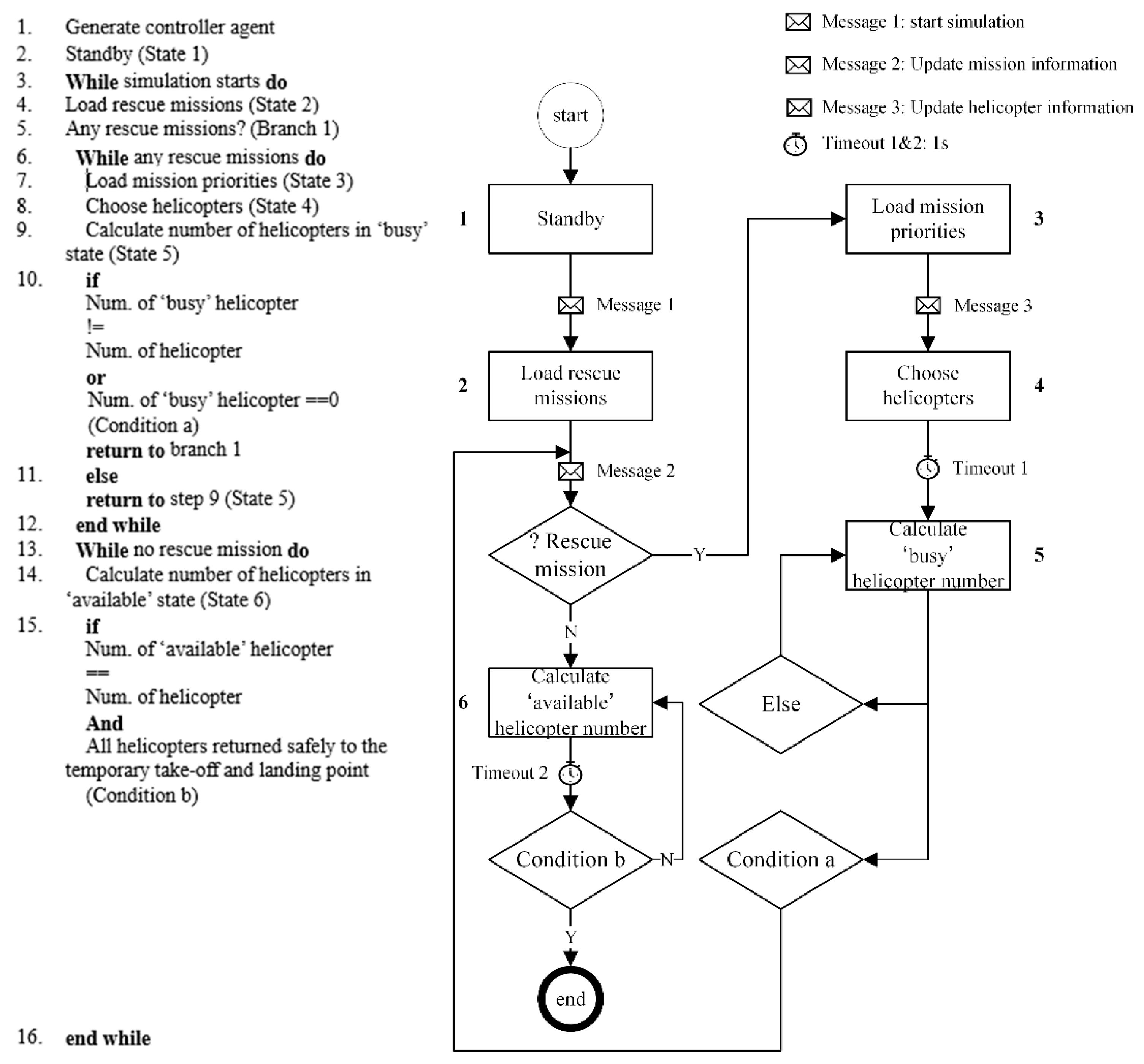
4.2.1. Controller Agent
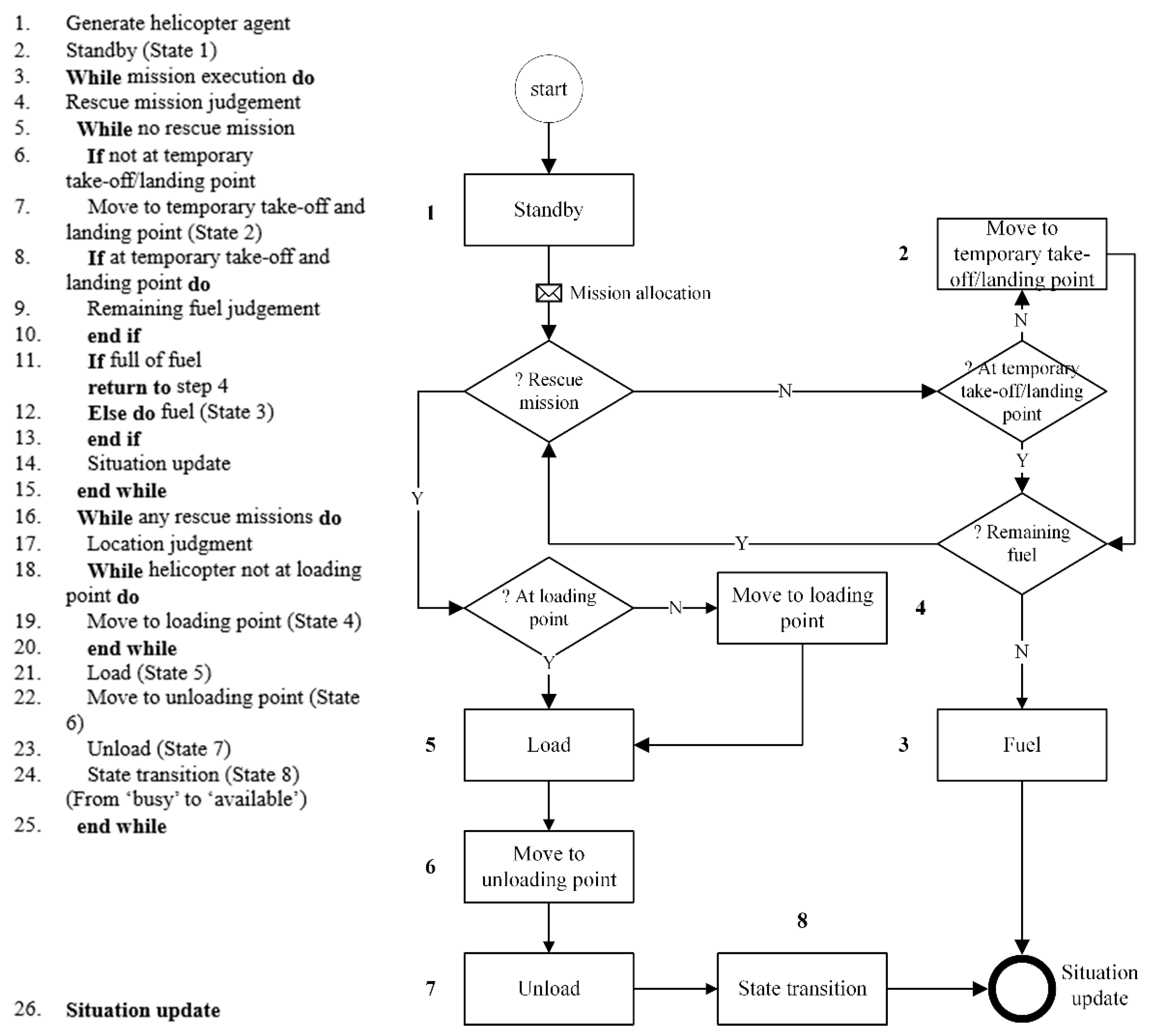
4.2.2. Helicopter Agent
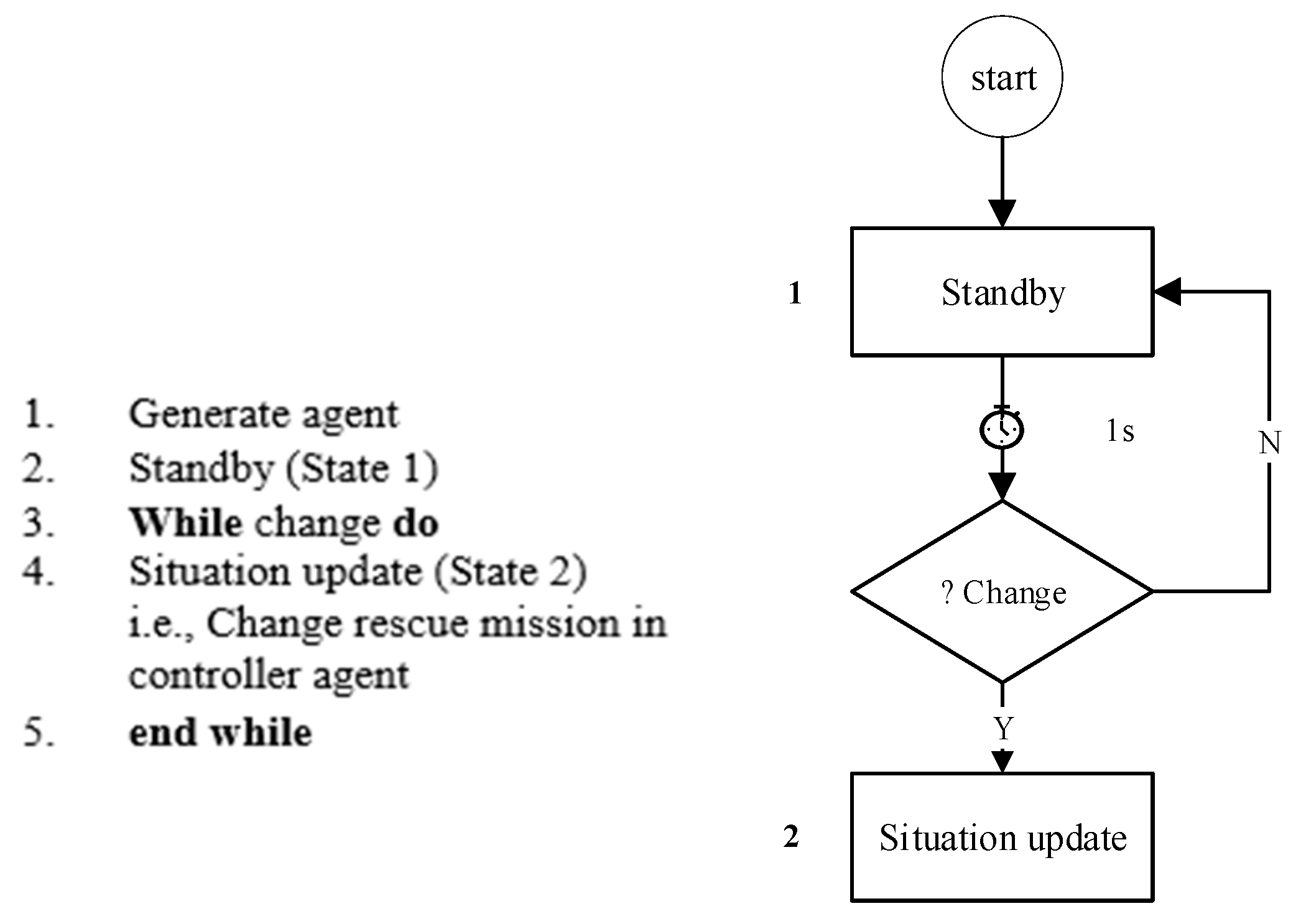
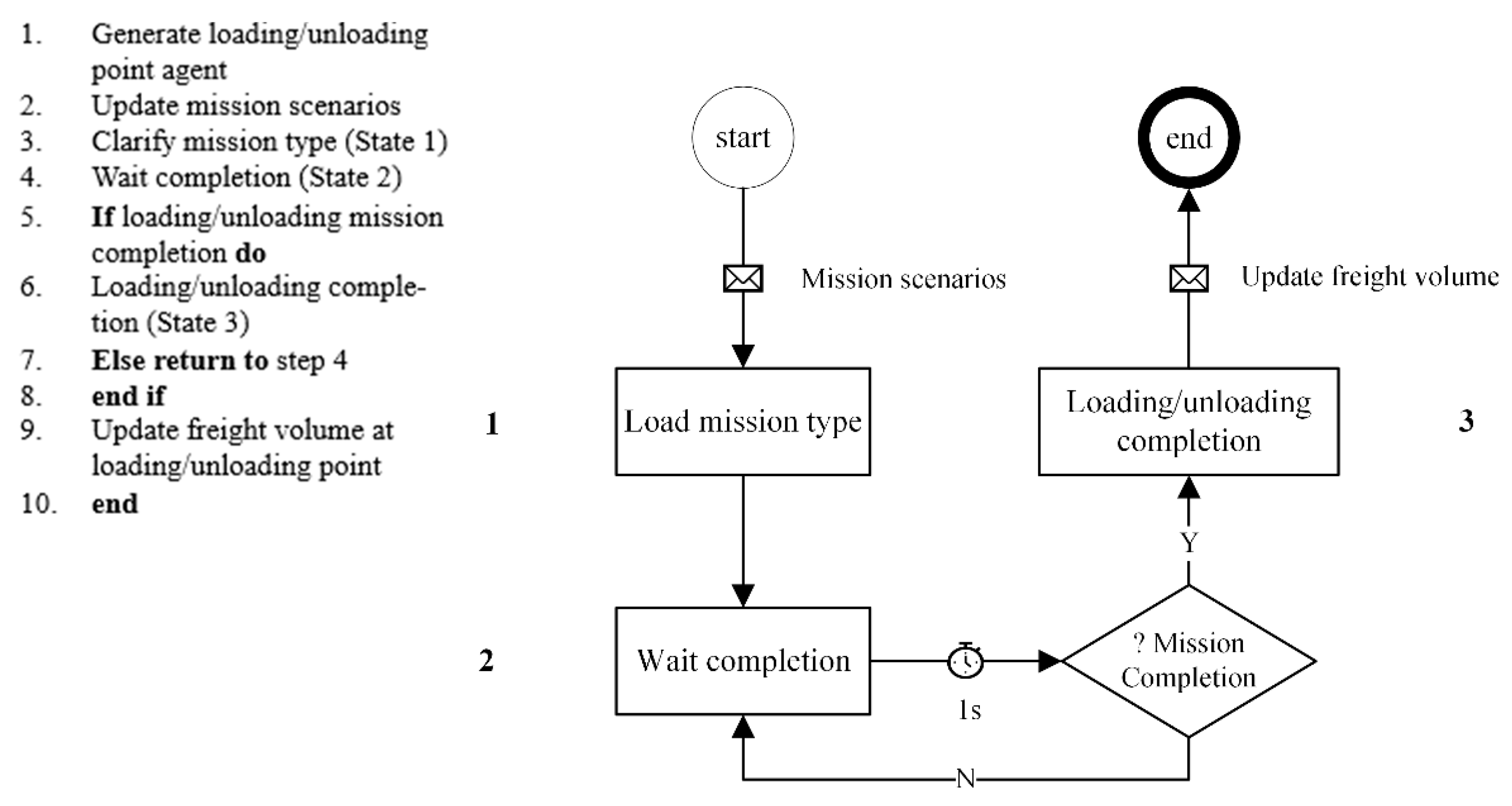
4.2.3. Other Point-Agents
- Temporary Take-off/Landing Point Agent;
- Loading/Unloading Point Agent.
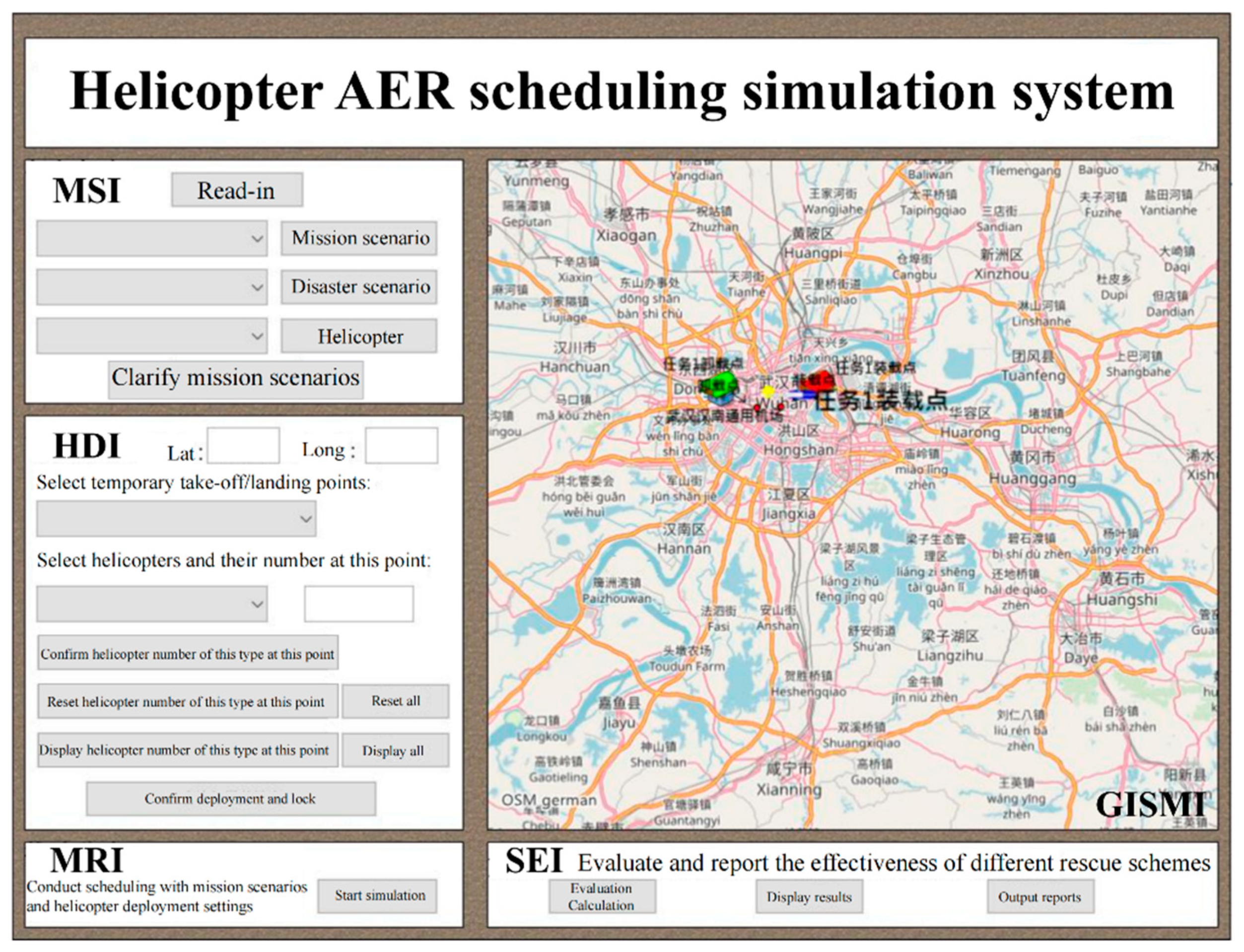
4.3. User Interface
4.4. Evaluation Method
5. Case Study
5.1. Mission Scenarios
5.1.1. Flood Disaster Scenario
5.1.2. Helicopter AER Force Scenario
5.2. Rescue Helicopter Deployment
5.3. Simulation Validation
5.4. Effectiveness Evaluation and Analysis
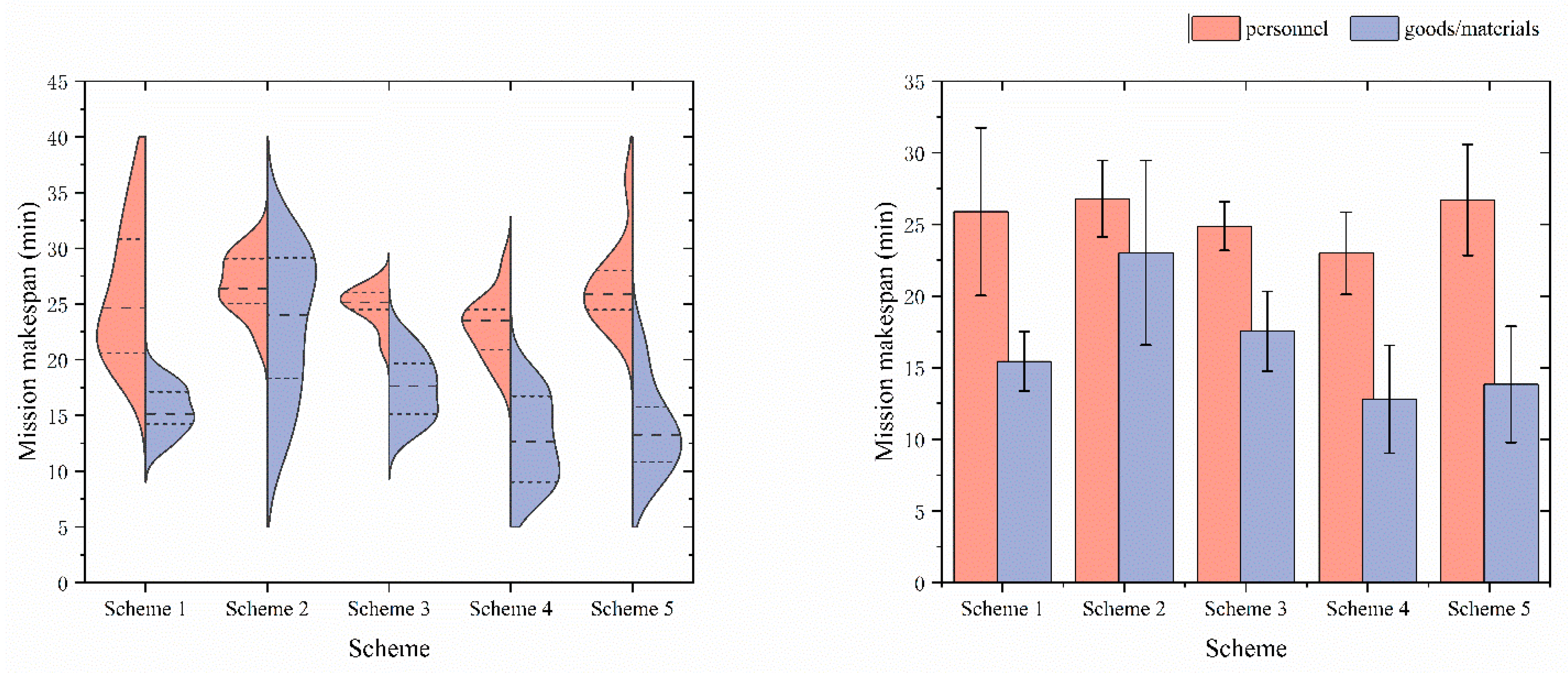
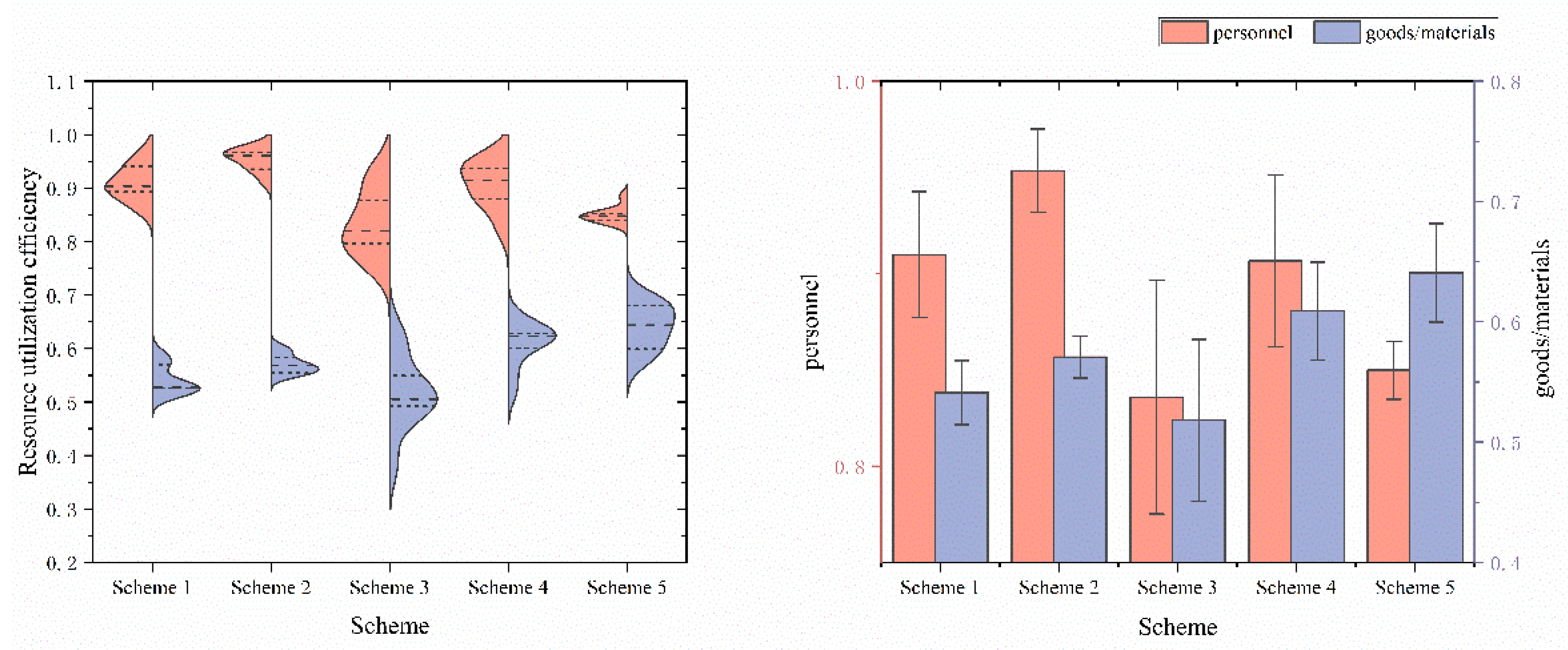
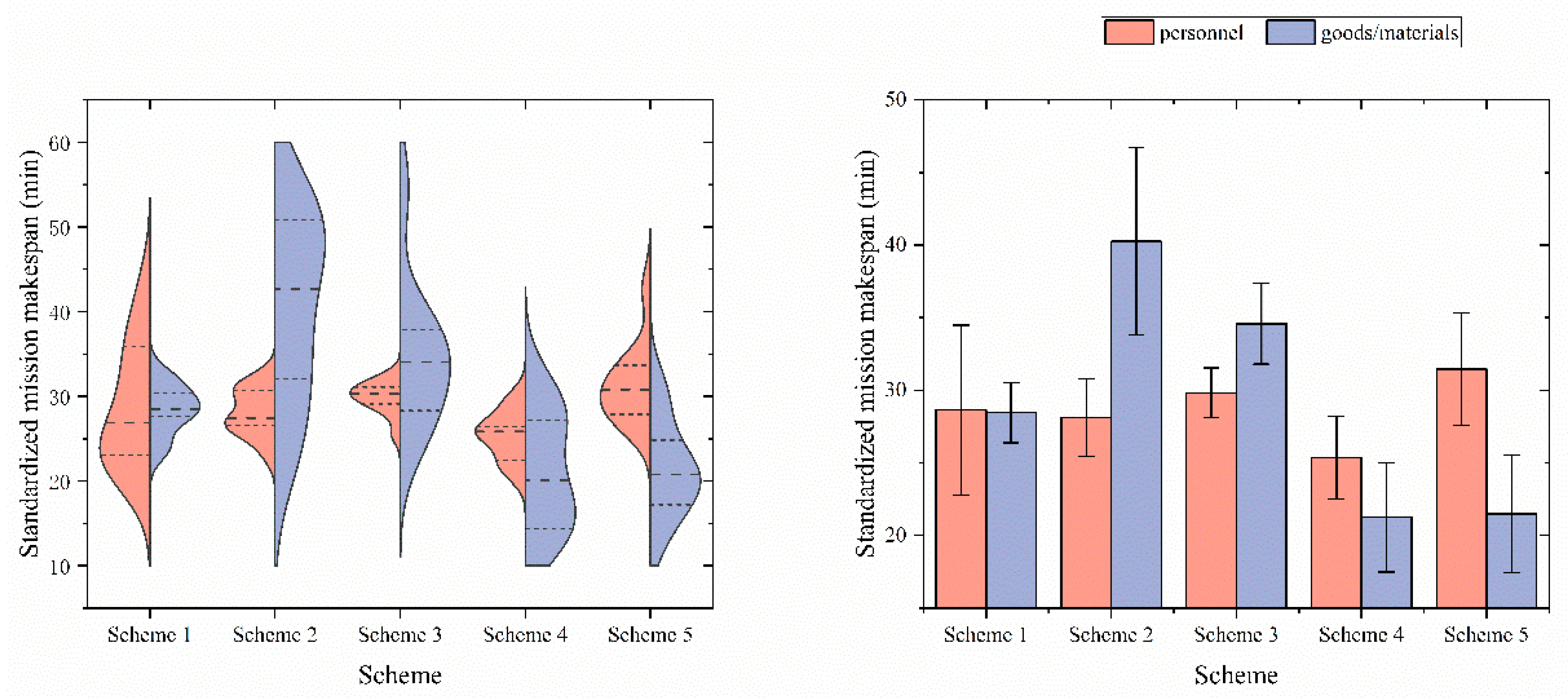
- 10.
- No matter whether the loading type is personnel or goods/material, Scheme 4 has the shortest mission makespan; while considering resource utilization efficiency, Scheme 2 and Scheme 5 stand out of all the schemes.
- 11.
- In Scheme 1, the number of helicopters is the largest. There are two Mi-26s in Wuhan, also sufficient small/medium-sized helicopters nearby for the scheduling. However, the results show that the effectiveness of the scheme is only in the middle level among all schemes. Since the helicopter number is constrained by the capabilities of loading points and unloading points, the multi-sortie deployment of the large helicopter (Mi-26) may reach the upper limit. Therefore, the helicopter waiting time is increased.
- 12.
- In Scheme 2, the personnel resource utilization efficiency is the highest. During the scheduling process, only small/medium-sized helicopters perform personnel transfer missions, not large helicopters. The results show that scheduling a large helicopter will reduce the resource utilization efficiency for transferring personnel.
- 13.
- In Scheme 3, eight small/medium-sized helicopters (including one Mi-26) are used, but not enough for personnel transfer missions. The total passenger capacity is 28% of the total personnel transfer requirement. Obviously, the results of Scheme 3 have a gap with better solutions.
- 14.
- In Scheme 5, the number of helicopters is the second largest among the five schemes. There is one Mi-26 outside Hubei Province. Also, many small/medium-sized helicopters nearby are dispatched. The results show that personnel transfer costs a long time, but the goods/material transfer is close to the shortest (from Scheme 4). That means Scheme 5 is suitable for the AER needs with goods/material transfer missions. Also, scheduling large helicopters from outside Hubei province has a big impact on mission effectiveness.
- 15.
- The Mi-26 helicopter in Scheme 1 and Scheme 2 is deployed at the Wuhan Hannan General Aviation Airport in Hubei Province. Differently, the Mi-26 helicopter in Scheme 3 and Scheme 4 is deployed at the Jingmen Zhanghe Airport in Hubei Province.
- 16.
- Seen from the results of one certain simulation for Scheme 1 (shown in Table 9), there are some differences in mission makespan for the same mission in various degrees. It could be interpreted that the scheme’s effectiveness is clearly related to the freight volume, the waiting time, the transfer time, and the scheduling sequence.
6. Conclusions and Further Study
- This paper enables the quantitative comparison of deployment strategies for different types of helicopters. Comparison results show that, compared with heavy reliance on large helicopters, the balanced deployment of different types of helicopters can help improve mission effectiveness. This provides a counterintuitive reference for the construction of the AER force of the government department.
- This paper also reveals two dominant strategies for helicopter schedule. It can improve resource utilization efficiency when scheduling small/medium-sized helicopters instead of large helicopters to transfer people in object-oriented scheduling. As for process-oriented scheduling, it can improve the scheme’s effectiveness when transferring people and goods/materials alternately.
- The findings of this paper explain the strong correlation between the scheme’s effectiveness and the scheduling procedure. The interpretations of the case study suggest that the scheduling procedures entail variations in the response time and resource utilization efficiency. This demonstrates the significance of decision-making support in AER missions.
- The conceptual model and simulation system can be served as an auxiliary quantitative decision-making tool in evaluating the real rescue schemes of AER for flood disasters. The M&S method proves to be effective for rationality and effectiveness.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Luo, P.; He, B.; Takara, K.; Xiong, Y.; Nover, D.; Duan, W.; Fukushi, K. Historical assessment of Chinese and Japanese flood management policies and implications for managing future floods. Environ. Sci. Policy 2015, 48, 265–277. [Google Scholar] [CrossRef] [Green Version]
- Chang, M.-S.; Tseng, Y.-L.; Chen, J.-W. A scenario planning approach for the flood emergency logistics preparation problem under uncertainty. Transp. Res. Part E Logist. Transp. Rev. 2007, 43, 737–754. [Google Scholar] [CrossRef]
- Kvočka, D.; Falconer, R.A.; Bray, M. Flood hazard assessment for extreme flood events. Nat. Hazards 2016, 84, 1569–1599. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Zevenbergen, C.; Ma, Y. Urban pluvial flooding and stormwater management: A contemporary review of China’s challenges and “sponge cities” strategy. Environ. Sci. Policy 2018, 80, 132–143. [Google Scholar] [CrossRef]
- Guo, X.; Zhu, A.; Li, Q.; Chen, R. Improving the response to inland flooding. Science 2021, 374, 831–832. [Google Scholar] [CrossRef] [PubMed]
- Yazdani, M.; Mojtahedi, M.; Loosemore, M.; Sanderson, D.; Dixit, V. An integrated decision model for managing hospital evacuation in response to an extreme flood event: A case study of the Hawkesbury-Nepean River, NSW, Australia. Saf. Sci. 2022, 155, 105867. [Google Scholar] [CrossRef]
- Hasan, M.M.; Rahman, M.A.; Sedigh, A.; Khasanah, A.U.; Asyhari, A.T.; Tao, H.; Bakar, S.A. Search and rescue operation in flooded areas: A survey on emerging sensor networking-enabled IoT-oriented technologies and applications. Cogn. Syst. Res. 2021, 67, 104–123. [Google Scholar] [CrossRef]
- Cui, P.; Peng, J.; Shi, P.; Tang, H.; Ouyang, C.; Zou, Q.; Liu, L.; Li, C.; Lei, Y. Scientific challenges of research on natural hazards and disaster risk. Geogr. Sustain. 2021, 2, 216–223. [Google Scholar] [CrossRef]
- Wu, Q.; Han, J.; Lei, C.; Ding, W.; Li, B.; Zhang, L. The challenges and countermeasures in emergency management after the establishment of the ministry of emergency management of China: A case study. Int. J. Disaster Risk Reduct. 2021, 55, 102075. [Google Scholar] [CrossRef]
- Van Tilburg, C.J.W.; Medicine, E. First report of using portable unmanned aircraft systems (drones) for search and rescue. Wilderness Environ. Med. 2017, 28, 116–118. [Google Scholar] [CrossRef]
- Kharazi, B.A.; Behzadan, A.H.J.C. Flood depth mapping in street photos with image processing and deep neural networks. Comput. Environ. Urban Syst. 2021, 88, 101628. [Google Scholar] [CrossRef]
- Hildmann, H.; Kovacs, E.J.D. Using unmanned aerial vehicles (UAVs) as mobile sensing platforms (MSPs) for disaster response, civil security and public safety. Drones 2019, 3, 59. [Google Scholar] [CrossRef] [Green Version]
- Bai, V.J. Emergency management in China. Comp. Emerg. Manag. 2014, 6. [Google Scholar]
- Xia, Z.-H.; Pan, W.-J.; Lin, R.-C.; Chen, T. Research on efficiency of aviation emergency rescue under major disasters. Comput. Eng. Des. 2012, 33, 1251–1256. [Google Scholar]
- Chen, X.; Liu, H.; Bai, J.; Wu, Z. Evaluation model of simulation based training for helicopter emergency rescue mission. Int. J. Multimed. Ubiquitous Eng. 2015, 10, 69–80. [Google Scholar] [CrossRef]
- Graham, M. Flood prevention and recovery. In Disaster Management for Libraries and Archives; Routledge: London, UK, 2017; pp. 112–133. [Google Scholar]
- Zhang, M.; Yu, H.; Yu, J.; Zhang, Y. Dispatching plan based on route optimization model considering random wind for aviation emergency rescue. Math. Probl. Eng. 2016, 2016, 1395701. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Hu, D.-h.; Tan, N. Construction of command system of emergency logistics. In Proceedings of the 2009 International Conference on Information Management, Innovation Management and Industrial Engineering, Xi’an, China, 26–27 December 2009. [Google Scholar]
- Grissom, C.K.; Thomas, F.; James, B.J. Medical helicopters in wilderness search and rescue operations. Air Med. J. 2006, 25, 18–25. [Google Scholar] [CrossRef]
- Poussin, J.K.; Botzen, W.W.; Aerts, J.C. Effectiveness of flood damage mitigation measures: Empirical evidence from French flood disasters. Glob. Environ. Chang. 2015, 31, 74–84. [Google Scholar] [CrossRef]
- Radmanesh, M.; Sharma, B.; Kumar, M.; French, D. PDE solution to UAV/UGV trajectory planning problem by spatio-temporal estimation during wildfires. Chin. J. Aeronaut. 2021, 34, 601–616. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Su, X.; Peng, H.; Zhao, X.; Lu, C. A review on carrier aircraft dispatch path planning and control on deck. Chin. J. Aeronaut. 2020, 33, 3039–3057. [Google Scholar]
- Bae, J.W.; Shin, K.; Lee, H.-R.; Lee, H.J.; Lee, T.; Kim, C.H.; Cha, W.-C.; Kim, G.W.; Moon, I.-C. Evaluation of disaster response system using agent-based model with geospatial and medical details. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 1454–1469. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Z.; Tian, Y.; Wang, B.; Ynag, H.; Wu, G. Evaluation method for helicopter maritime search and rescue response plan with uncertainty. Chin. J. Aeronaut. 2021, 34, 493–507. [Google Scholar]
- Sproull, M. Modeling of Mass Casualty Management during a Radiological or Nuclear Event. Ph.D. Thesis, George Mason University, Fairfax, VA, USA, 2022. [Google Scholar]
- Chen, P.; Zhang, J.; Sun, Y. Research on emergency rescue of urban flood disaster based on wargame simulation. J. Indian Soc. Remote Sens. 2018, 46, 1677–1687. [Google Scholar] [CrossRef] [Green Version]
- Naboureh, A.; Feizizadeh, B.; Naboureh, A.; Bian, J.; Blaschke, T.; Ghorbanzadeh, O.; Moharrami, M. Traffic accident spatial simulation modeling for planning of road emergency services. ISPRS Int. J. Geo-Inf. 2019, 8, 371. [Google Scholar] [CrossRef]
- Repoussis, P.P.; Paraskevopoulos, D.C.; Vazacopoulos, A.; Hupert, N. Optimizing emergency preparedness and resource utilization in mass-casualty incidents. Eur. J. Oper. Res. 2016, 255, 531–544. [Google Scholar] [CrossRef] [Green Version]
- Yazdani, M.; Mojtahedi, M.; Loosemore, M.; Sanderson, D. A modelling framework to design an evacuation support system for healthcare infrastructures in response to major flood events. Prog. Disaster Sci. 2022, 13, 100218. [Google Scholar] [CrossRef]
- Li, T.; Li, Z.; Zhao, W.; Li, X.; Zhu, X.; Pan, S.; Feng, C.; Zhao, Y.; Jia, L.; Li, J. Analysis of medical rescue strategies based on a rough set and genetic algorithm: A disaster classification perspective. Int. J. Disaster Risk Reduct. 2020, 42, 101325. [Google Scholar] [CrossRef]
- Kettner, A.; Schumann, G.; Tellman, B.J.E. The push toward local flood risk assessment at a global scale. Eos 2019, 100. [Google Scholar] [CrossRef]
- Lee, Y.-Y.; Park, H.-J.; Oh, S.-C. A Study on the Development of Urban Internal Waters Flooding Visualization System Using Unreal Engine. In Proceedings of the 40th Asian Conference on Remote Sensing, Daejeon, Republic of Korea, 14–18 October 2019. [Google Scholar]
- Hu, R.; Fang, F.; Pain, C.; Navon, I.M. Rapid spatio-temporal flood prediction and uncertainty quantification using a deep learning method. J. Hydrol. 2019, 575, 911–920. [Google Scholar] [CrossRef]
- Abdulla, B.; Kiaghadi, A.; Rifai, H.S.; Birgisson, B. Characterization of vulnerability of road networks to fluvial flooding using SIS network diffusion model. J. Infrastruct. Preserv. Resil. 2020, 1, 6. [Google Scholar] [CrossRef] [Green Version]
- Xu, G.; Wang, J.; Huang, G.Q.; Chen, C.-H. Data-driven resilient fleet management for cloud asset-enabled urban flood control. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1827–1838. [Google Scholar] [CrossRef]
- Volonté, A.; Muetzelfeldt, M.; Schiemann, R.; Turner, A.G.; Klingman, N. Magnitude, scale, and dynamics of the 2020 mei-yu rains and floods over China. Adv. Atmos. Sci. 2021, 38, 2082–2096. [Google Scholar] [CrossRef]
- Trivedi, A.; Singh, A.J. A hybrid multi-objective decision model for emergency shelter location-relocation projects using fuzzy analytic hierarchy process and goal programming approach. Int. J. Proj. Manag. 2017, 35, 827–840. [Google Scholar] [CrossRef]
- Kroh, P.J. Identification of landing sites for rescue helicopters in mountains with use of Geographic Information Systems. J. Mt. Sci. 2020, 17, 261–270. [Google Scholar] [CrossRef]
- Yao, J.; Zhang, X.; Murray, A.T. Location optimization of urban fire stations: Access and service coverage. Comput. Environ. Urban Syst. 2019, 73, 184–190. [Google Scholar] [CrossRef]
- Jäger, W.; Christie, E.; Hanea, A.; Heijer, C.; Spencer, T. A Bayesian network approach for coastal risk analysis and decision making. Coast. Eng. 2018, 134, 48–61. [Google Scholar] [CrossRef] [Green Version]
- Hu, B.; Pan, F.; Wang, L.J. A scheduling algorithm for medical emergency rescue aircraft trajectory based on hybrid estimation and intent inference. J. Comb. Optim. 2019, 37, 40–61. [Google Scholar] [CrossRef]
- Guitart, A.; Delahaye, D.; Feron, E. An Accelerated Dual Fast Marching Tree Applied to Emergency Geometric Trajectory Generation. Aerospace 2022, 9, 180. [Google Scholar] [CrossRef]
- Zheng, S.; Yang, Z.; He, Z.; Wang, N.; Chu, C.; Yu, H. Hybrid simulated annealing and reduced variable neighbourhood search for an aircraft scheduling and parking problem. Int. J. Prod. Res. 2020, 58, 2626–2646. [Google Scholar] [CrossRef]
- Miyano, K.; Shinkuma, R.; Mandayam, N.B.; Sato, T.; Oki, E. Utility based scheduling for multi-UAV search systems in disaster-hit areas. IEEE Access 2019, 7, 26810–26820. [Google Scholar] [CrossRef]
- Rodríguez-Espíndola, O.; Albores, P.; Brewster, C.J. Disaster preparedness in humanitarian logistics: A collaborative approach for resource management in floods. Eur. J. Oper. Res. 2018, 264, 978–993. [Google Scholar] [CrossRef] [Green Version]
- Cai, T.; Li, X.; Ding, X.; Wang, J.; Zhan, J. Flood risk assessment based on hydrodynamic model and fuzzy comprehensive evaluation with GIS technique. Int. J. Disaster Risk Reduct. 2019, 35, 101077. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, H.; Luo, M.; Huang, J. Non-uniform hybrid strategy for architecting and modeling flight vehicle focused system-of-systems operations. Chin. J. Aeronaut. 2016, 29, 160–172. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Liu, H.; Tian, Y. Inverse design of mission success space for combat aircraft contribution evaluation. Chin. J. Aeronaut. 2020, 33, 2189–2203. [Google Scholar]
- Sun, X.; Liu, H.; Wu, G.; Zhou, Y. Training effectiveness evaluation of helicopter emergency relief based on virtual simulation. Chin. J. Aeronaut. 2018, 31, 2000–2012. [Google Scholar]
- Links, J.M.; Schwartz, B.S.; Lin, S.; Kanarek, N.; Mitrani-Reiser, J.; Sell, T.; Watson, C.; Ward, D.; Slemp, C.; Burhans, R.; et al. COPEWELL: A conceptual framework and system dynamics model for predicting community functioning and resilience after disasters. Disaster Med. Public Health Prep. 2018, 12, 127–137. [Google Scholar] [CrossRef]
- Pagano, A.; Pluchinotta, I.; Pengal, P.; Cokan, B.; Giordano, R. Engaging stakeholders in the assessment of NBS effectiveness in flood risk reduction: A participatory System Dynamics Model for benefits and co-benefits evaluation. Sci. Total Environ. 2019, 690, 543–555. [Google Scholar] [CrossRef]
- Alonso Vicario, S.; Mazzoleni, M.; Bhamidipati, S.; Gharesifard, M.; Ridolfi, E.; Pandolfo, C.; Alfonso, L. Unravelling the influence of human behaviour on reducing casualties during flood evacuation. Hydrol. Sci. J. 2020, 65, 2359–2375. [Google Scholar] [CrossRef]
- Siyam, N.; Alqaryouti, O.; Abdallah, S. Research issues in agent-based simulation for pedestrians evacuation. IEEE Access 2019, 8, 134435–134455. [Google Scholar] [CrossRef]
- Olave-Rojas, D.; Nickel, S.J. Modeling a pre-hospital emergency medical service using hybrid simulation and a machine learning approach. Simul. Model. Pract. Theory 2021, 109, 102302. [Google Scholar] [CrossRef]
- Brailsford, S.C.; Eldabi, T.; Kunc, M.; Mustafee, N.; Osorio, A.F. Hybrid simulation modelling in operational research: A state-of-the-art review. Eur. J. Oper. Res. 2019, 278, 721–737. [Google Scholar] [CrossRef]
- Hong, Y.; Cho, N.; Kim, Y.; Choi, B. Multiobjective optimization for aircraft arrival sequencing and scheduling. J. Air Transp. 2017, 25, 115–122. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, T.; Zhang, H.; Cheutet, V.; Shen, G. The design and simulation of an autonomous system for aircraft maintenance scheduling. Comput. Ind. Eng. 2019, 137, 106041. [Google Scholar] [CrossRef] [Green Version]
- Xiong, P.; Liu, H.; Tian, Y.; Chen, Z.; Wang, B.; Yang, H. Helicopter maritime search area planning based on a minimum bounding rectangle and K-means clustering. Chin. J. Aeronaut. 2021, 34, 554–562. [Google Scholar] [CrossRef]
- Yazdani, M.; Mojtahedi, M.; Loosemore, M. Enhancing evacuation response to extreme weather disasters using public transportation systems: A novel simheuristic approach. J. Comput. Des. Eng. 2020, 7, 195–210. [Google Scholar] [CrossRef]
- Sun, X.; Liu, H.; Tian, Y.; Wu, G.; Gao, Y. Team effectiveness evaluation and virtual reality scenario mapping model for helicopter emergency rescue. Chin. J. Aeronaut. 2020, 33, 3306–3317. [Google Scholar]
- Dubois, F.; Renaud-Goud, P.; Stolf, P. Capacitated Vehicle Routing Problem Under Deadlines: An Application to Flooding Crisis. IEEE Access 2022, 10, 45629–45642. [Google Scholar] [CrossRef]
- Sadek, M.; Li, X. Low-cost solution for assessment of urban flash flood impacts using sentinel-2 satellite images and fuzzy analytic hierarchy process: A case study of ras ghareb city, Egypt. Adv. Civ. Eng. 2019, 2019, 2561215. [Google Scholar] [CrossRef] [Green Version]
- Taymourtash, N.; Zagaglia, D.; Zanotti, A.; Muscarello, V.; Gibertini, G.; Quaranta, G. Experimental study of a helicopter model in shipboard operations. Aerosp. Sci. Technol. 2021, 115, 106774. [Google Scholar] [CrossRef]
- Pourghasemi, H.R.; Amiri, M.; Edalat, M.; Ahrari, A.H.; Panahi, M.; Sadhasivam, N.; Lee, S. Assessment of urban infrastructures exposed to flood using susceptibility map and Google Earth Engine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 1923–1937. [Google Scholar] [CrossRef]
- Mishra, A.; Alnahit, A.; Campbell, B. Impact of land uses, drought, flood, wildfire, and cascading events on water quality and microbial communities: A review and analysis. J. Hydrol. 2021, 596, 125707. [Google Scholar] [CrossRef]
- Bauranov, A.; Rakas, J. Designing airspace for urban air mobility: A review of concepts and approaches. Prog. Aerosp. Sci. 2021, 125, 100726. [Google Scholar] [CrossRef]
- Xu, C.; Liao, X.; Tan, J.; Ye, H.; Lu, H. Recent research progress of unmanned aerial vehicle regulation policies and technologies in urban low altitude. IEEE Access 2020, 8, 74175–74194. [Google Scholar] [CrossRef]
- Sui, D.; Liu, K.; Li, Q. Dynamic Prediction of Air Traffic Situation in Large-Scale Airspace. Aerospace 2022, 9, 568. [Google Scholar] [CrossRef]
- Jin, W.; Yang, J.; Fang, Y.; Feng, W. Research on Application and Deployment of UAV in Emergency Response. In Proceedings of the 2020 IEEE 10th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 17–19 July 2020. [Google Scholar]
- Van Geffen, G.-J.; Spoelder, E.J.; Tijben, A.; Slagt, C. An Approved Landing Site (ALS) improves the logistics of interhospital transfer of critically ill patients by helicopter. Scand. J. Trauma Resusc. Emerg. Med. 2021, 29, 111. [Google Scholar] [CrossRef]
- Chao, C.-C.; Li, R.-G. Effects of cargo types and load efficiency on airline cargo revenues. J. Air Transp. Manag. 2017, 61, 26–33. [Google Scholar] [CrossRef]
- Gao, Y.; Tian, Y.; Liu, H.; Sun, X. Gaussian fitting based optimal design of aircraft mission success space using multi-objective genetic algorithm. Chin. J. Aeronaut. 2020, 33, 3318–3330. [Google Scholar]
- Gomez, V.; Gomez, N.; Rodas, J.; Paiva, E.; Saad, M.; Gregor, R. Pareto optimal pid tuning for Px4-Based unmanned aerial vehicles by using a multi-objective particle swarm optimization algorithm. Aerospace 2020, 7, 71. [Google Scholar] [CrossRef]
- Gao, Y.; Cheong, B.; Bozhko, S.; Wheeler, P.; Gerada, C.; Yang, T. Surrogate role of machine learning in motor-drive optimization for more-electric aircraft applications. Chin. J. Aeronaut. 2022, in press. [Google Scholar] [CrossRef]
- Vertipedia. Search for Aircraft in Vertical Flight. Available online: https://vertipedia.vtol.org (accessed on 1 May 2022).
- Wiki. Wikipedia. Available online: www.wikipedia.org (accessed on 1 May 2022).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission Classification | Mission Type | Load | Flight | Loading Point | Unloading Point |
|---|---|---|---|---|---|
| Personnel transfer mission | Hanging and exporting personnel | People | Slung-load (Hover) | ||
| Landing and exporting personnel | People | Normal (Land) | |||
| Hovering and importing personnel | People | Slung-load (Hover) | |||
| Landing and importing personnel | People | Normal (Land) | |||
| Goods/Material transfer mission | Airdrop goods/material | Goods/Material | Slung-load (Hover) | ||
| Landing and transporting goods/material | Goods/Material | Normal (Land) | |||
| Blocking dike | Goods/Material | Slung-load (Hover) | |||
| Hanging and transporting large equipment | Large Equipment | Slung-load (Hover) |
| Agent | Behavior | Explanation |
|---|---|---|
| Controller Agent | Load mission scenarios | Reading the database information corresponding to mission scenarios through the user interface |
| Load mission priorities | Sorting the mission release order of the simulation system according to the mission priority | |
| Choose helicopters | Choosing helicopters according to scheduling rules | |
| Judgement | Judging when the simulation starts and whether the simulation end conditions are met | |
| Situation update | Reassigning missions according to the updated missions and priorities | |
| Evaluation | Evaluating the simulation effectiveness result for different rescue schemes | |
| Helicopter Agent | Mission execution | Describing the helicopter logic during the loading/unloading mission execution |
| State transition | Showing the transition between ‘available’ state and ‘busy’ state | |
| Fuel consumption | Calculating the fuel consumption | |
| Situation update | Delivering helicopter state transition information | |
| Judgement | Describing judgement of mission execution, state transition, fuel consumption, and situation update | |
| Temporary Take-off/Landing Point Agent | Loading mission execution | Describing the loading mission execution when temporary take-off/landing point coincides with loading point |
| Situation update | Describing the change of remaining missions related to the temporary take-off/landing point | |
| Loading Point Agent | Loading mission execution | Describing the execution process of loading missions |
| Situation update | Describing the change of remaining missions related to the loading point | |
| Unloading Point Agent | Unloading mission execution | Describing the execution process of unloading missions |
| Situation update | Describing the change of remaining missions related to the unloading point |
| Agent | Message | Implication |
|---|---|---|
| Controller Agent | Start of simulation | Simulation start message associated with the user interface of the simulation system |
| Mission allocation | Information on the assignment of helicopters for missions corresponding to priority | |
| Updated situation | Remaining mission information corresponding to each point after situation update | |
| Helicopter Agent | Fuel consumption | Information on the amount of fuel consumed by helicopters for determining the percentage of fuel remaining |
| Start of mission | Mission start message after mission allocation associated with the Controller Agent | |
| State | Message reflecting whether helicopter is in ‘available’ or ‘busy’ state | |
| Performance | Information of helicopters including useful load, fuel capacity, cruise speed, passenger capacity, ability to cable land, etc. | |
| Location | Geographical coordinate of the helicopter | |
| Point-agents | Num. of take-offs | Numbers of helicopters that can take off simultaneously at this point |
| Num. of landings | Numbers of helicopters that can land simultaneously at this point | |
| Mission type | Information on the load (personnel/goods/material) and flight mode (normal flight/slung-load flight) | |
| Mission executability | Executability to takeoff/land/hover to perform missions | |
| Mission completion | Loading/unloading completion and the change of remaining missions related to this point |
| Agent | Variable | Type | Implication |
|---|---|---|---|
| Controller Agent | StartSimulation | Boolean | Simulation starts or not |
| Num. of completed missions | Int | Number of completed missions | |
| Num. of ‘busy’ helicopters | Int | Number of helicopters in ‘busy’ state | |
| Num. of helicopters | Int | Number of helicopters | |
| Num. of missions | Int | Number of missions in the mission scenario | |
| MissionPriority | Double | Priority of the mission | |
| NoChoice | Boolean | Situation updated or not | |
| Helicopter Agent | BeginConsumption | Boolean | Calculate fuel consumption or not |
| BeginExecute | Boolean | Situation updated or not | |
| State | Boolean | ‘available’ state or ‘busy’ state | |
| Performance | Performance (custom java class) | Information of helicopters including useful load, fuel capacity, cruise speed, passenger capacity, ability to cable land, etc. | |
| Fuel consumption rate | Double | The ratio of fuel consumption to time | |
| Fuel consumption time | Double | Time of fuel consumption including flying, take-off, landing, and hovering | |
| Location | Location (custom java class) | Geographical coordinate of the helicopter | |
| Point-agents | Num. of take-offs | Int | Numbers of helicopters that can take off simultaneously at this point |
| Num. of landings | Int | Numbers of helicopters that can land simultaneously at this point | |
| Num. of missions | Int | Number of missions that can be performed simultaneously at this point | |
| FinishMission | Boolean | Mission completed or not | |
| FlightMode | Boolean | Loaded in fuselage or slung load operation |
| Disaster Site Information | Place A | Place B | Place C | Point D | Point E |
|---|---|---|---|---|---|
| Longitude (°) | 114.33 | 114.51 | 114.03 | 114.64 | 114.23 |
| Latitude (°) | 30.39 | 30.58 | 30.6 | 30.14 | 30.52 |
| Freight volume of personnel (person) | 200 | 0 | 198 | 80 | 80 |
| Freight volume of goods/material (kg) | 8000 | 10,000 | 5000 | 2600 | 2600 |
| Large equipment needed (piece) | 0 | 1 | 0 | 0 | 0 |
| Precipitation grade of rain weather | 4 | 4 | 0 | 4 | 4 |
| Risk of secondary disasters (%) | 0 | 30 | 0 | 0 | 0 |
| Personnel transfer mission priority | 2 | / | 1 | 0.4 | 0.4 |
| Goods/material transfer mission priority | 1.5 | 2.1 | 0.46 | 0.36 | 0.36 |
| Equipment transfer mission priority | / | 0.94 | / | / | / |
| Airport Information | Wuhan | Xiantao | Lishan | Jingmen | Jingdezhen | Laiwu | Zhuzhou |
|---|---|---|---|---|---|---|---|
| Longitude (°) | 114.06 | 113.6 | 113.33 | 112.05 | 117.08 | 117.57 | 113.21 |
| Latitude (°) | 30.25 | 30.41 | 31.89 | 30.98 | 29.14 | 36.44 | 27.77 |
| Helicopter stands (a) | 28 | 10 | 16 | 28 | 2 | 8 | 10 |
| Maximum simultaneous takeoffs (a) | 25 | 4 | 4 | 8 | 20 | 8 | 10 |
| Maximum simultaneous landings (a) | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Maximum number of supporting helicopters simultaneously (a) | 1 | 0 | 0 | 1 | 1 | 1 | 1 |
| Maximum number of refueling simultaneously (a) | 1 | 0 | 0 | 1 | 0 | 1 | 1 |
| Available Helicopter Information | AC313 | EC135 | Enstrom 480 | PZL SW-4 | Robinson R44 | Mi-26 | Eurocopter AS350 |
|---|---|---|---|---|---|---|---|
| Max useful load (kg) | 5000 | 1500 | 500 | 600 | 300 | 20,000 | 1026 |
| Fuel capacity (L) | 4750 | 700 | 340 | 471 | 140 | 12,000 | 540 |
| Maximum takeoff mass (kg) | 13,800 | 2500 | 1361 | 1800 | 1133 | 56,000 | 2250 |
| Cruise speed (km/h) | 250 | 230 | 211 | 182 | 202 | 255 | 226 |
| Passenger capacity (a) | 27 | 7 | 4 | 4 | 3 | 82 | 4 |
| Ability to cable land | 1 | 1 | 0 | 0 | 0 | 1 | 0 |
| Refueling time (min) | 9.5 | 1.5 | 0.7 | 1 | 0.5 | 24 | 1.1 |
| Waiting time before refueling (min) | 35 | 43 | 45 | 44 | 45 | 45 | 44 |
| Handover time of personnel (min/person) | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Handover time of goods/material (min/100 kg) | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
| Airport | Helicopter | Scheme 1 | Scheme 2 | Scheme 3 | Scheme 4 | Scheme 5 |
|---|---|---|---|---|---|---|
| Wuhan Hannan General Aviation Airport | AC313 | 2 | 2 | 1 | 2 | 2 |
| EC135 | 1 | 1 | 1 | 1 | ||
| Enstrom 480 | 1 | 1 | 1 | 1 | ||
| PZL SW-4 | 2 | 2 | 1 | 2 | 2 | |
| Robinson R44 | 2 | 2 | 2 | 2 | 2 | |
| Mi-26 | 2 | 1 | ||||
| Xintao Airport | AC313 | 1 | 1 | 1 | ||
| EC135 | 1 | 1 | 1 | 1 | ||
| Robinson R44 | 1 | |||||
| Eurocopter AS350 | 1 | 1 | 1 | 1 | ||
| Lishan General Aviation Airport | EC135 | 1 | ||||
| Jingmen Zhanghe Airport | AC313 | 1 | ||||
| EC135 | 1 | |||||
| Mi-26 | 1 | 1 | ||||
| Jingdezhen Lumeng Airport | SW-4 | 1 | 1 | 1 | 1 | 1 |
| Zhuzhou Lusong Airport | EC135 | 1 | 1 | 1 | ||
| Laiwu Xueye Airport | Mi-26 | 1 |
| No. | Helicopter | Sortie | (Person) | (min) | (min/Person) | (kg) | (min) | (min/100 kg) | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | AC313 | 1st | 27 | 1.17 | 87.01 | 2.75 | / | / | / | / |
| 1 | AC313 | 2nd | 27 | 1.17 | 208.27 | 6.59 | / | / | / | / |
| 1 | AC313 | 3rd | / | / | / | / | 2000 | 1.1 | 98.07 | 0.04 |
| 1 | AC313 | 4th | 27 | 1.17 | 203.90 | 6.45 | / | / | / | / |
| 2 | AC313 | 1st | 27 | 1.17 | 97.50 | 3.09 | / | / | / | / |
| 2 | AC313 | 2nd | 12 | 1.02 | 291.88 | 23.85 | / | / | / | / |
| 2 | AC313 | 3rd | 27 | 1.17 | 244.90 | 7.75 | / | / | / | / |
| 3 | EC135 | 1st | / | / | / | / | 1500 | 1.05 | 52.19 | 0.03 |
| 3 | EC135 | 2nd | 7 | 1 | 68.40 | 9.77 | / | / | / | / |
| 3 | EC135 | 3rd | 7 | 1 | 147.90 | 21.13 | / | / | / | / |
| 3 | EC135 | 4th | / | / | / | / | 1500 | 1 | 73.37 | 0.05 |
| 3 | EC135 | 5th | 7 | 1 | 155.98 | 22.28 | / | / | / | / |
| 4 | Enstrom 480 | 1st | 5 | 1 | 145.08 | 29.02 | / | / | / | / |
| 4 | Enstrom 480 | 2nd | 5 | 1 | 137.39 | 27.48 | / | / | / | / |
| 4 | Enstrom 480 | 3rd | / | / | / | / | 500 | 1 | 123.77 | 0.25 |
| 5 | PZL SW-4 | 1st | 5 | 1 | 309.30 | 61.86 | / | / | / | / |
| 5 | PZL SW-4 | 2nd | 5 | 1 | 64.79 | 12.96 | / | / | / | / |
| 6 | PZL SW-4 | 1st | 5 | 1 | 145.93 | 29.19 | / | / | / | / |
| 6 | PZL SW-4 | 2nd | 5 | 1 | 92.50 | 18.50 | / | / | / | / |
| 6 | PZL SW-4 | 3rd | 5 | 1 | 245.20 | 49.04 | / | / | / | / |
| 7 | Robinson R44 | 1st | / | / | / | / | 300 | 1 | 97.25 | 0.32 |
| 7 | Robinson R44 | 2nd | 4 | 1 | 222.12 | 55.53 | / | / | / | / |
| 7 | Robinson R44 | 3rd | 4 | 1 | 78.63 | 19.66 | / | / | / | / |
| 8 | Robinson R44 | 1st | 4 | 1 | 51.93 | 12.98 | / | / | / | / |
| 8 | Robinson R44 | 2nd | 4 | 1 | 349.45 | 87.36 | / | / | / | / |
| 9 | Mi-26 | 1st | / | / | / | / | 10,000 | 1.9 | 2019.34 | 0.11 |
| 10 | Mi-26 | 1st | / | / | / | / | 8000 | 1.7 | 22.34 | 0.002 |
| 10 | Mi-26 | 2nd | 82 | 1.72 | 237.91 | 1.69 | / | / | / | / |
| 10 | Mi-26 | 3rd | 69 | 1.59 | 202.28 | 1.84 | / | / | / | / |
| 11 | AC313 | 1st | / | / | / | / | 5000 | 1.4 | 52.13 | 0.007 |
| 11 | AC313 | 2nd | 27 | 1.17 | 78.89 | 2.50 | / | / | / | / |
| 11 | AC313 | 3rd | 27 | 1.17 | 93.28 | 2.95 | / | / | / | / |
| 11 | AC313 | 4th | 27 | 1.17 | 106.62 | 3.38 | / | / | / | / |
| 11 | AC313 | 5th | / | / | / | / | 200 | 1 | 63.84 | 0.32 |
| 11 | AC313 | 6th | 1 | 1 | 96.41 | 96.41 | / | / | / | / |
| 12 | EC135 | 1st | / | / | / | / | 1500 | 1.05 | 96.01 | 0.06 |
| 12 | EC135 | 2nd | 7 | 1 | 268.76 | 38.39 | / | / | / | / |
| 13 | Eurocopter AS350 | 1st | / | / | / | / | 1000 | 1 | 331.19 | 0.33 |
| 13 | Eurocopter AS350 | 2nd | / | / | / | / | 1000 | 1 | 231.61 | 0.23 |
| 14 | PZL SW-4 | 1st | 5 | 1 | 426.31 | 85.26 | / | / | / | / |
| 15 | EC135 | 1st | / | / | / | / | 1100 | 1.01 | 153.30 | 0.14 |
| 15 | EC135 | 2nd | 7 | 1 | 100.31 | 14.33 | / | / | / | / |
| 15 | EC135 | 3rd | 7 | 1 | 245.20 | 35.03 | / | / | / | / |
| Rescue Scheme Simulation Results | Scheme 1 | Scheme 2 | Scheme 3 | Scheme 4 | Scheme 5 | |
|---|---|---|---|---|---|---|
| Average personnel transfer time (min/person) | Mean values | 25.89 | 26.79 | 24.88 | 22.99 | 26.71 |
| Standard deviations | 5.85 | 2.67 | 1.70 | 2.87 | 3.87 | |
| Unit-weight goods/material transfer time (min/100 kg) | Mean values | 15.44 | 23.02 | 17.54 | 12.80 | 13.84 |
| Standard deviations | 2.08 | 6.44 | 2.78 | 3.76 | 4.05 | |
| Resource utilization efficiency for personnel transfer missions | Mean values | 91.00% | 95.36% | 83.59% | 90.66% | 84.99% |
| Standard deviations | 0.03 | 0.02 | 0.06 | 0.04 | 0.02 | |
| Resource utilization efficiency for goods/material transfer missions | Mean values | 54.11% | 57.08% | 51.80% | 60.88% | 64.08% |
| Standard deviations | 0.03 | 0.02 | 0.06 | 0.04 | 0.04 | |
| Standardized average personnel transfer time (min/person) | Mean values | 28.63 | 28.10 | 29.83 | 25.36 | 31.46 |
| Standard deviations | 7.29 | 2.76 | 1.95 | 2.85 | 4.73 | |
| Standardized unit-weight goods/material transfer time (min/100 kg) | Mean values | 28.46 | 40.25 | 34.58 | 21.25 | 21.49 |
| Standard deviations | 2.86 | 11.02 | 8.50 | 6.90 | 5.56 | |
| Rescue Scheme | Integrated Index |
|---|---|
| Scheme 1 | 1.15 |
| Scheme 2 | 1.34 |
| Scheme 3 | 1.28 |
| Scheme 4 | 0.96 |
| Scheme 5 | 1.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, Y.; Gao, Y.; Tian, Y.; Liu, H.; Wang, X. Helicopter Rescue for Flood Disaster: Scheduling, Simulation, and Evaluation. Aerospace 2022, 9, 822. https://doi.org/10.3390/aerospace9120822
Xue Y, Gao Y, Tian Y, Liu H, Wang X. Helicopter Rescue for Flood Disaster: Scheduling, Simulation, and Evaluation. Aerospace. 2022; 9(12):822. https://doi.org/10.3390/aerospace9120822
Chicago/Turabian StyleXue, Yuanbo, Yuan Gao, Yongliang Tian, Hu Liu, and Xiyu Wang. 2022. "Helicopter Rescue for Flood Disaster: Scheduling, Simulation, and Evaluation" Aerospace 9, no. 12: 822. https://doi.org/10.3390/aerospace9120822
APA StyleXue, Y., Gao, Y., Tian, Y., Liu, H., & Wang, X. (2022). Helicopter Rescue for Flood Disaster: Scheduling, Simulation, and Evaluation. Aerospace, 9(12), 822. https://doi.org/10.3390/aerospace9120822