
Dynamic Boundary Optimization of Free Route Airspace Sectors


Abstract
:1. Introduction
2. Related Work
3. Methods
3.1. ATC Workload Estimation Model in FRA
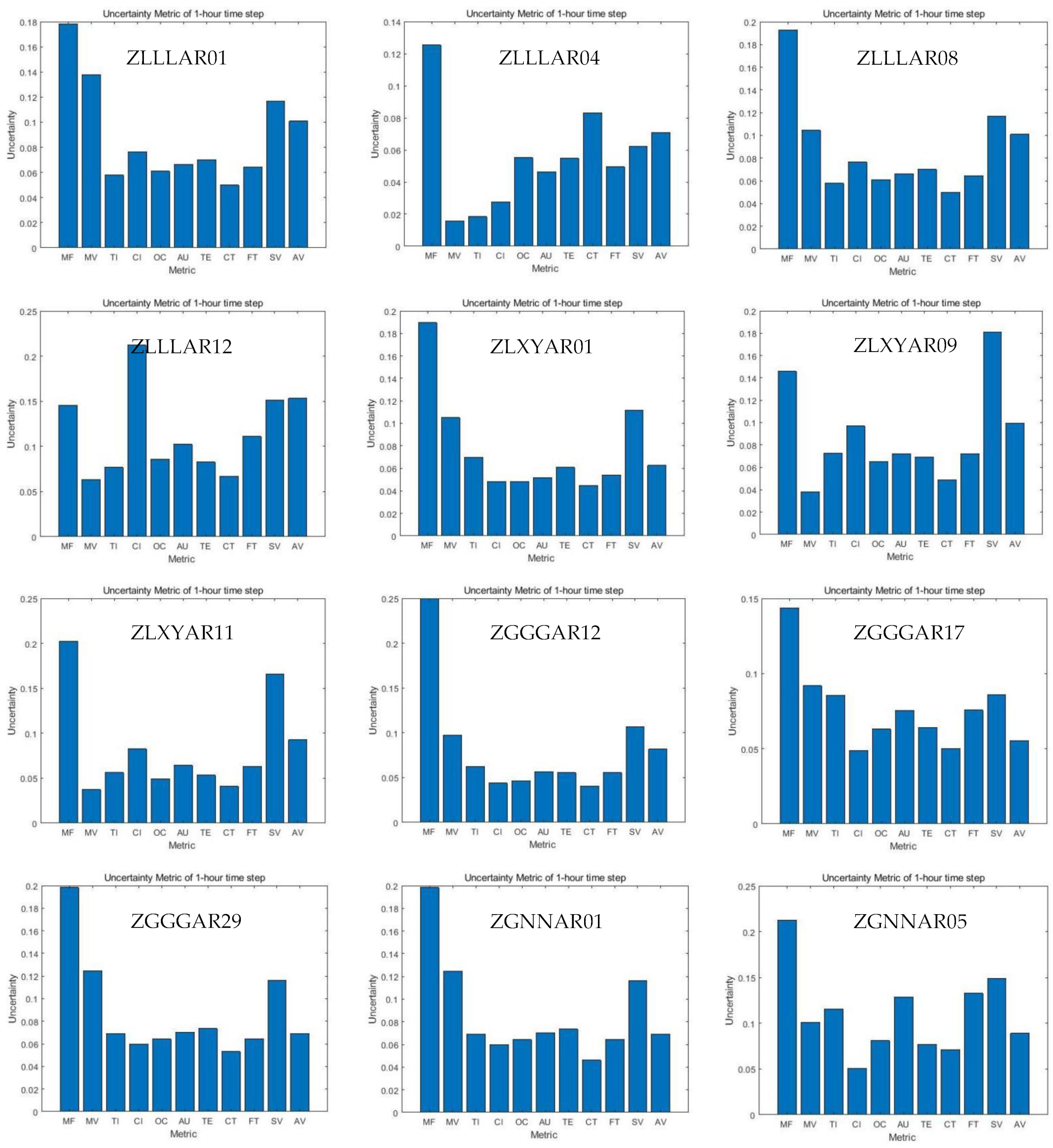
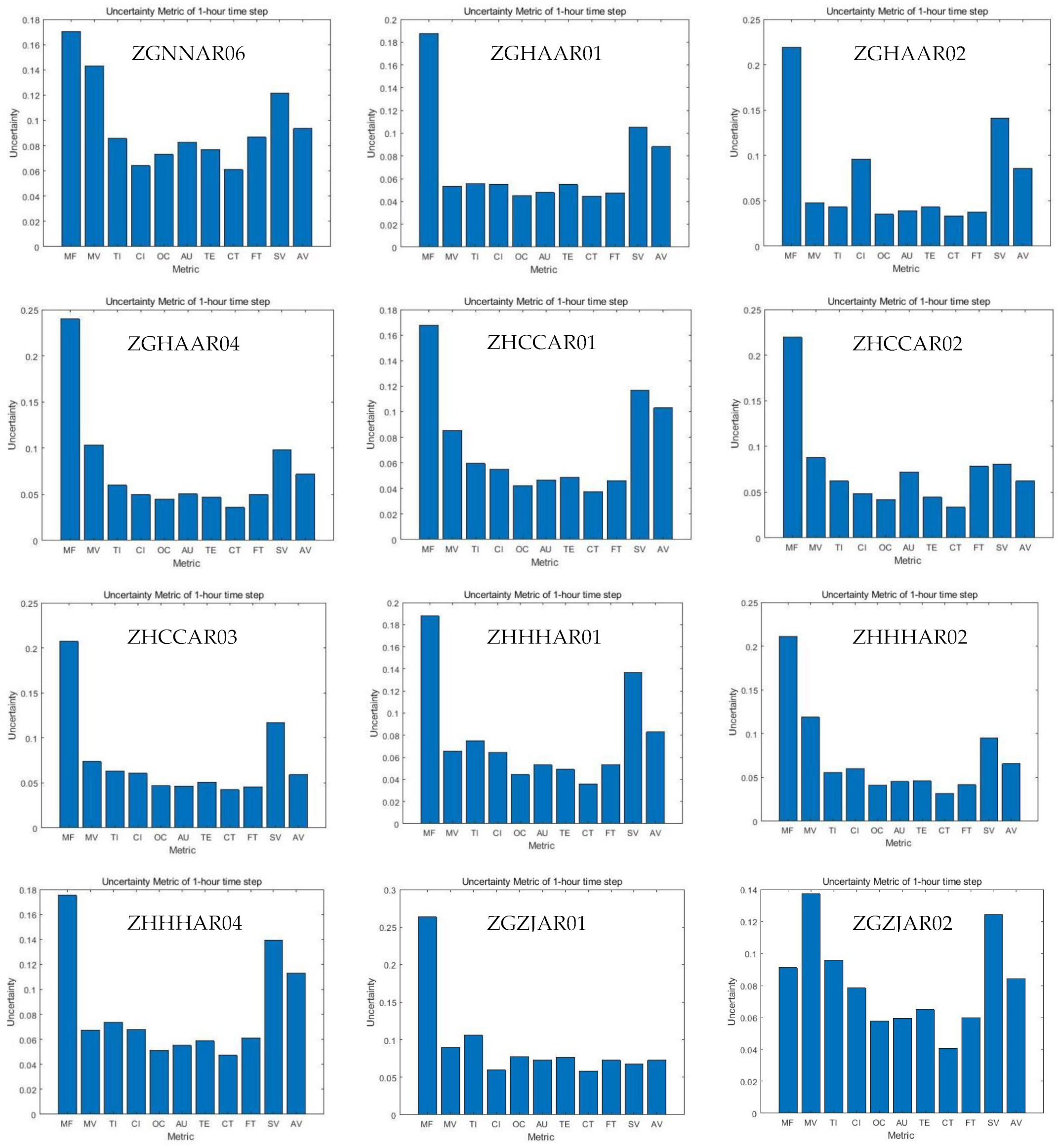
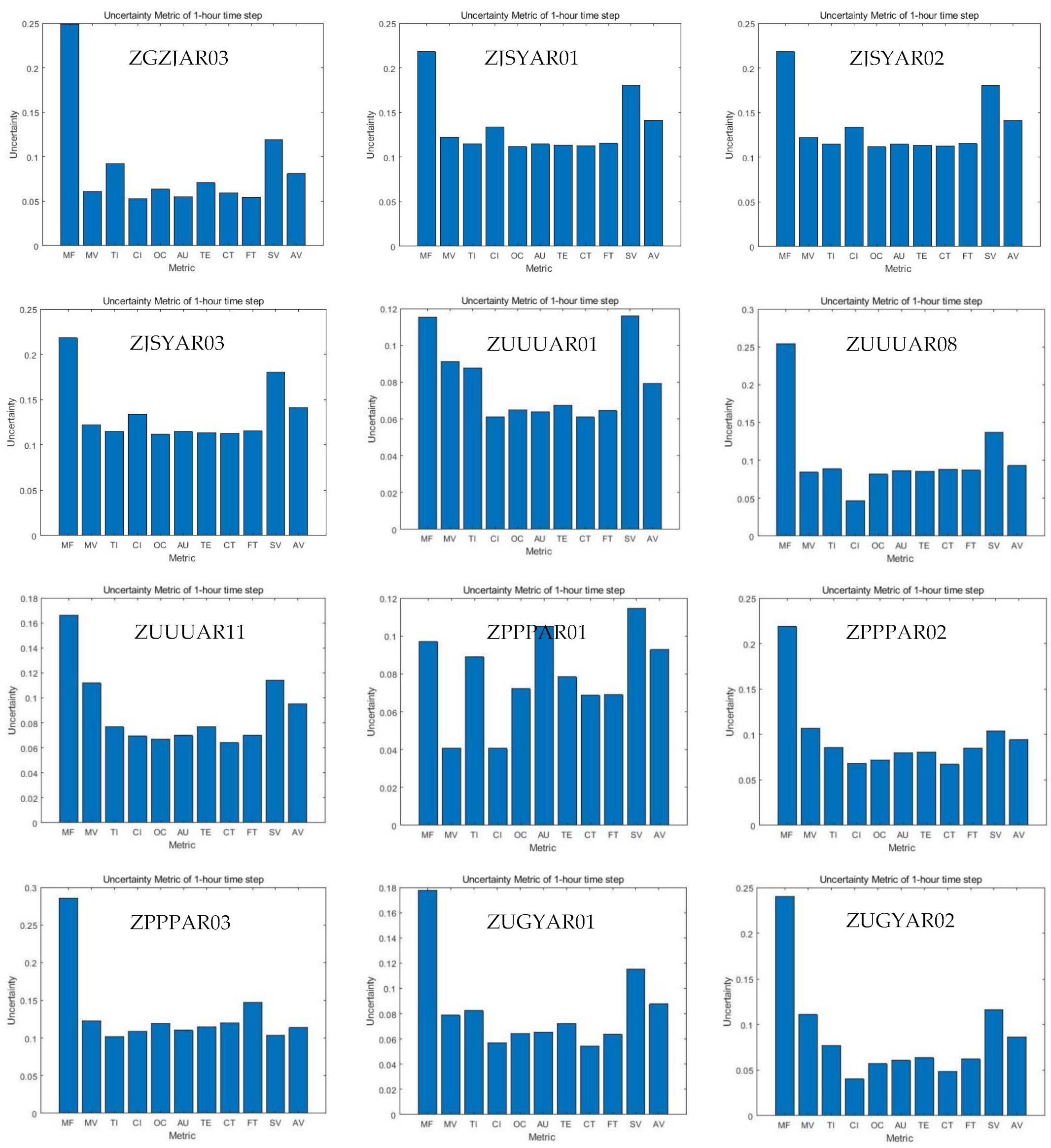
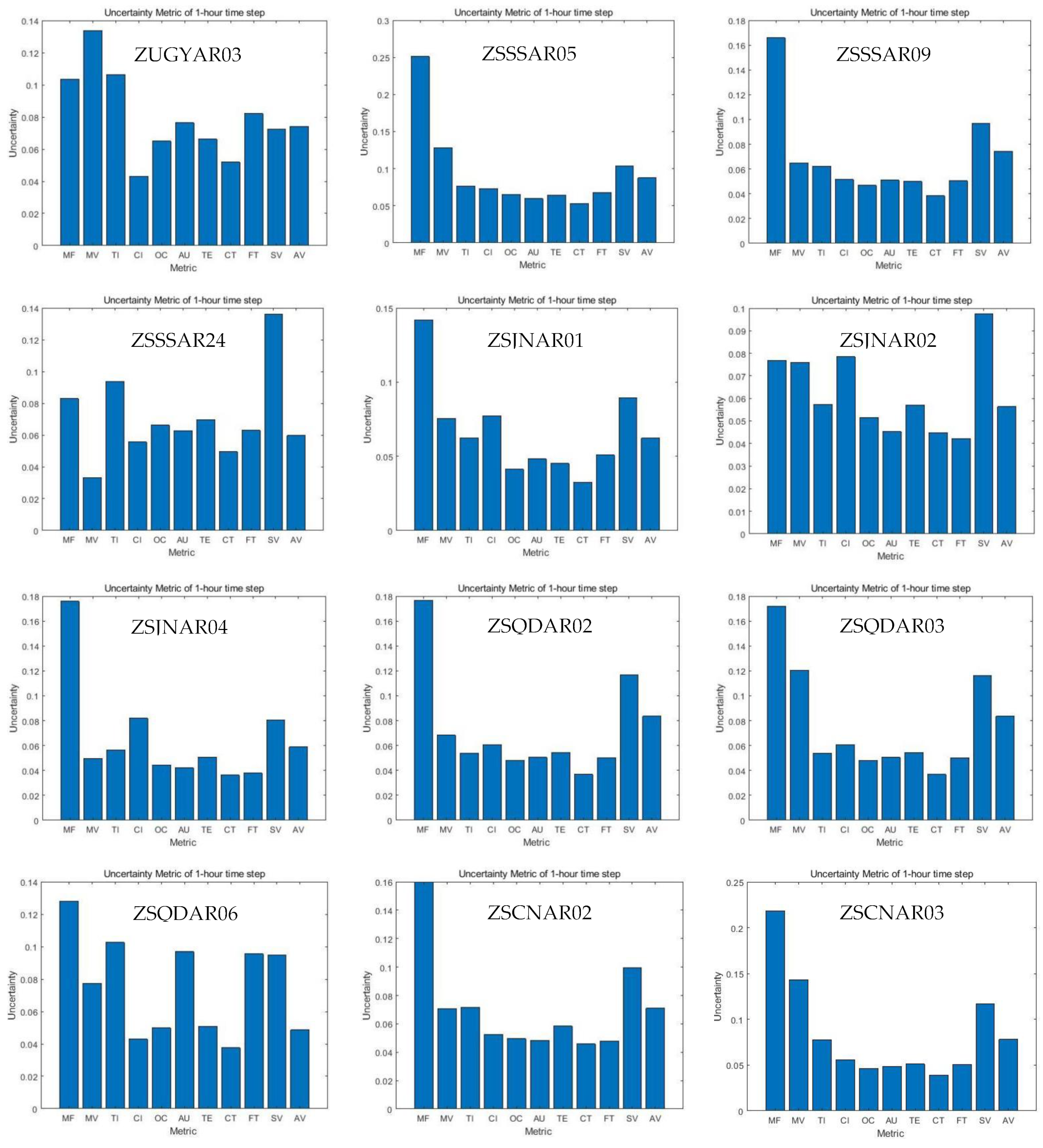
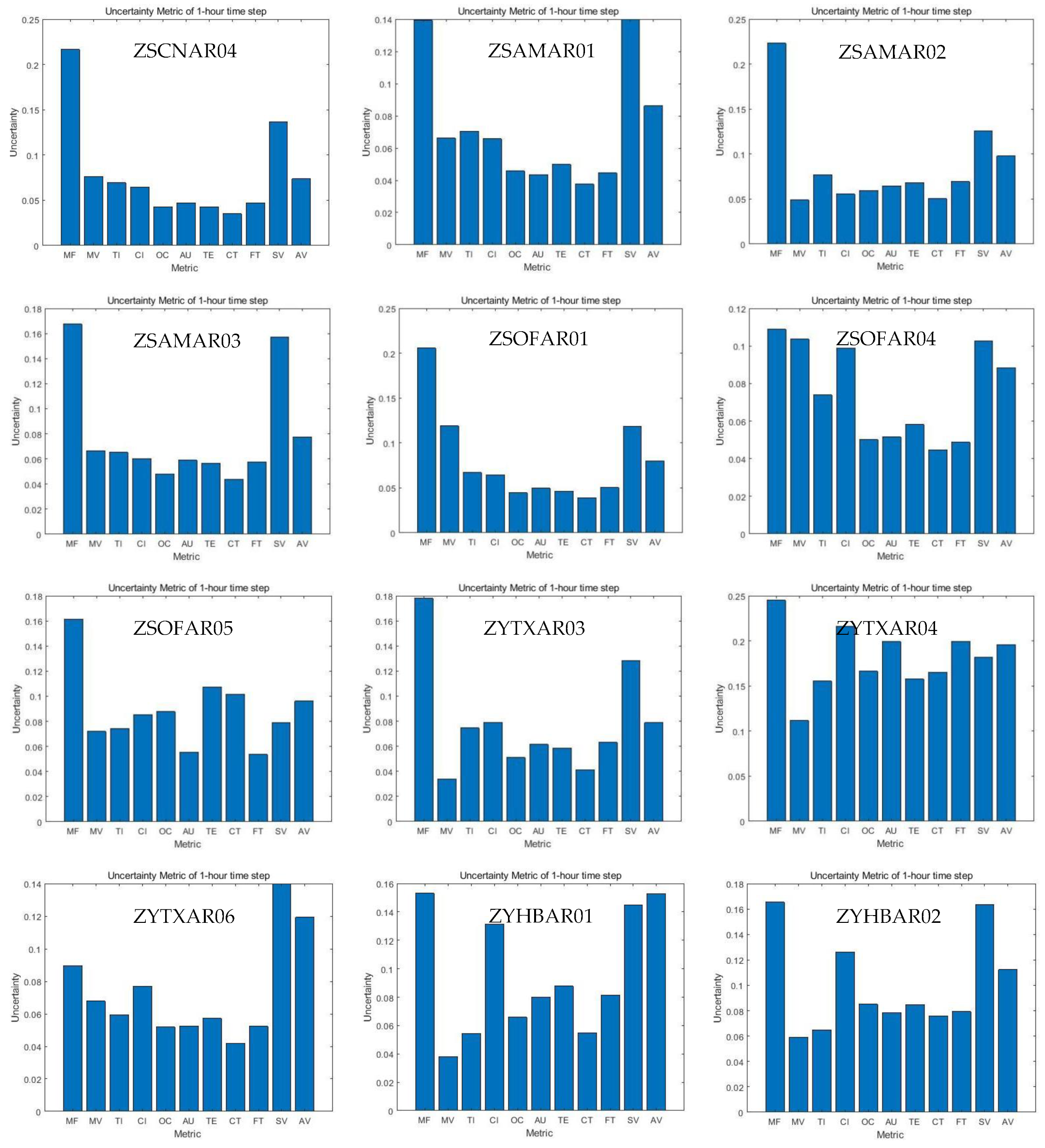
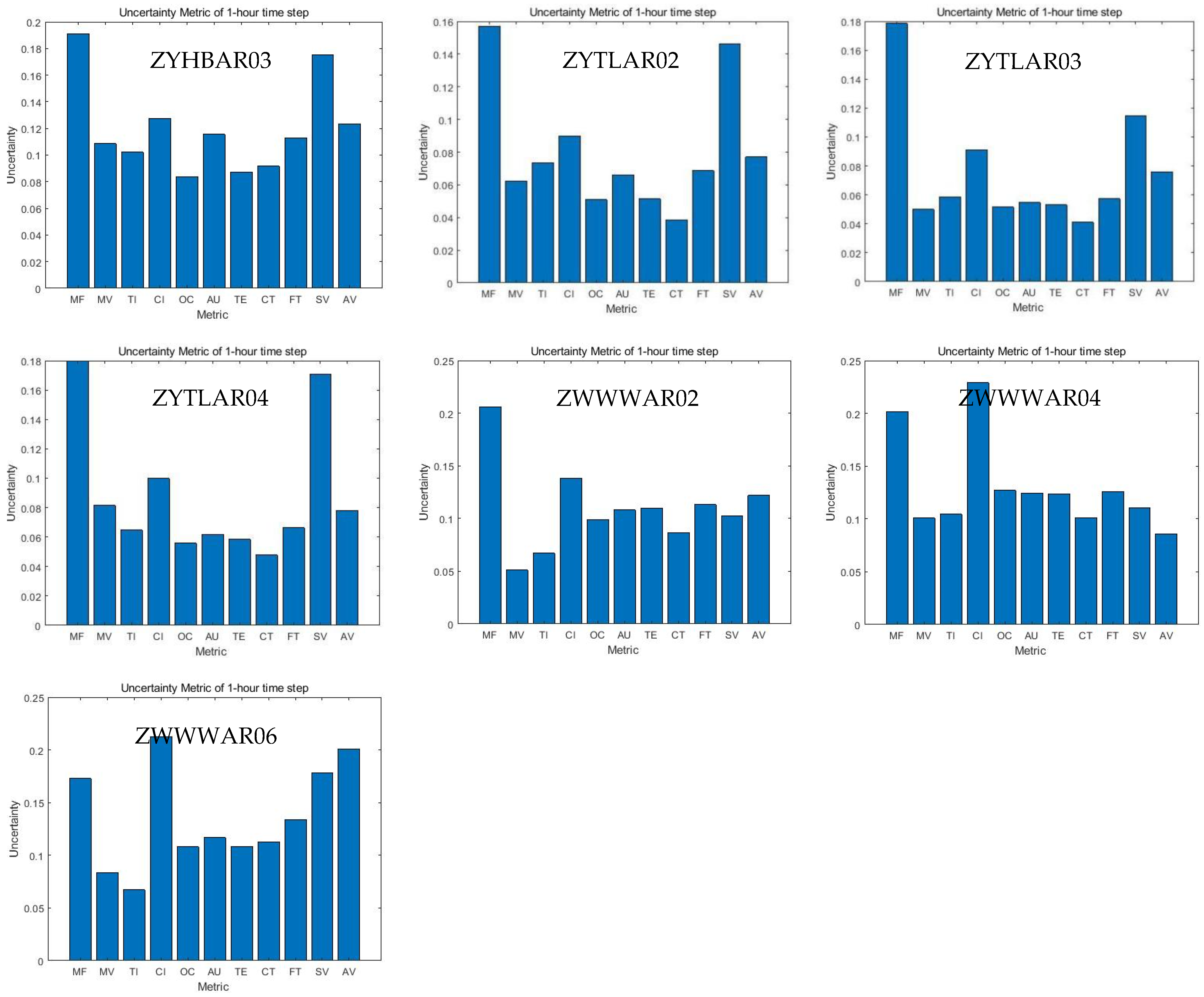
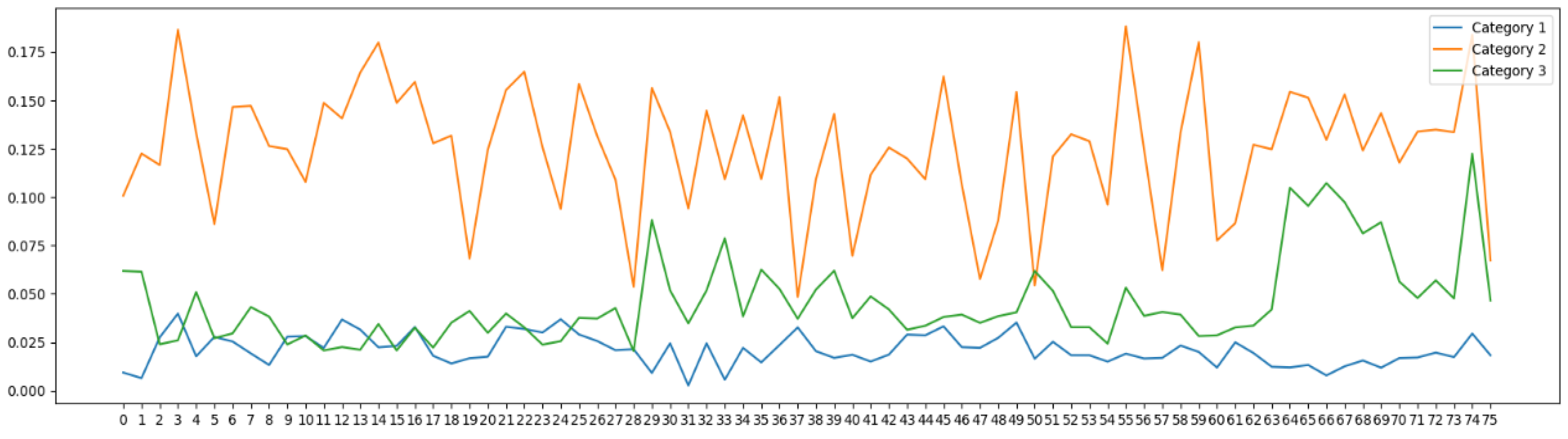
3.1.1. CIS and Its Uncertainty Analysis
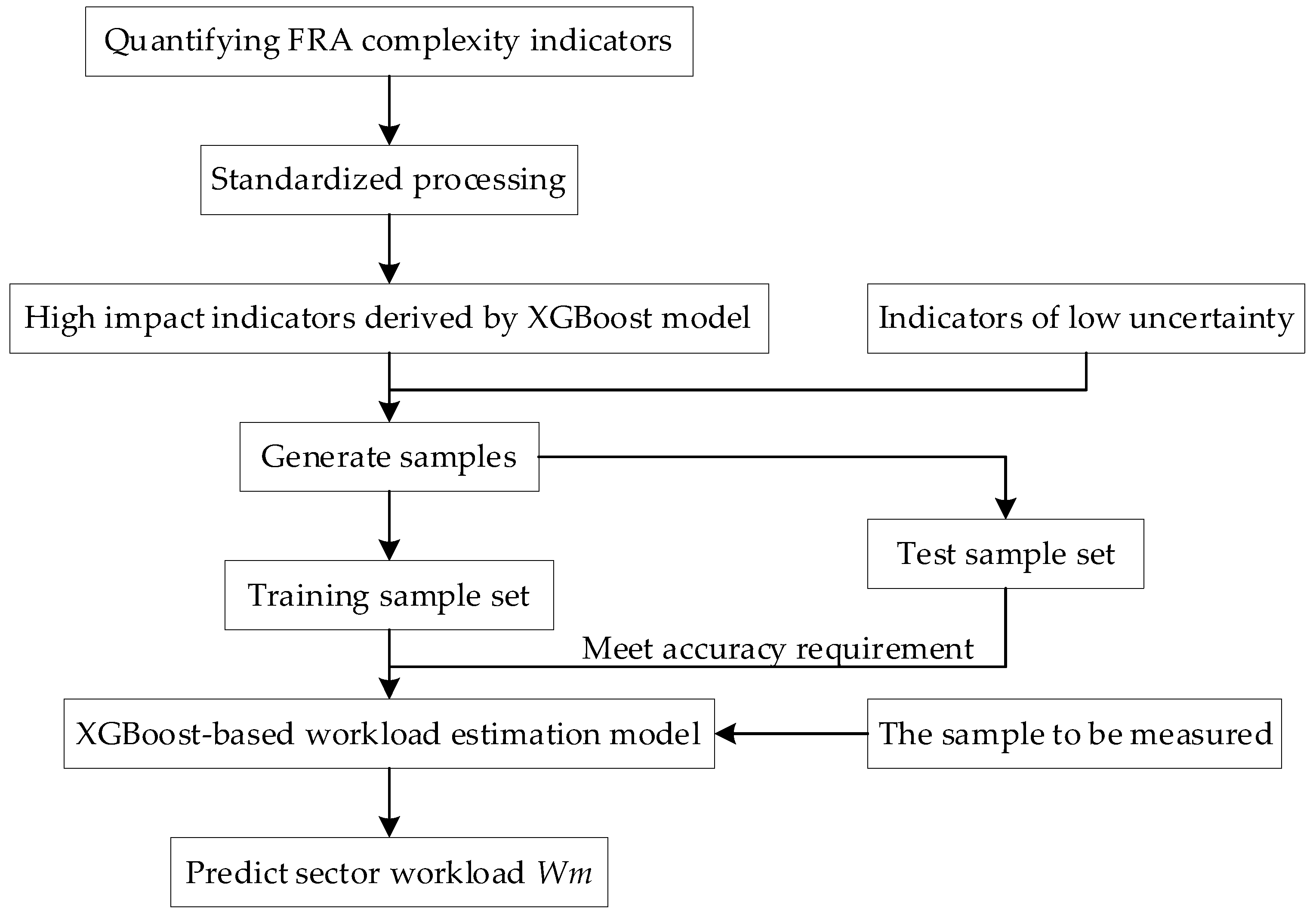
3.1.2. XGBoost-Based Workload Estimation Model Using CIS
- (a)
- Calculation and standardization of the indicators in the CIS based on flight plan data;
- (b)
- Use XGBoost model to derive high impact indicators;
- (c)
- Combine low uncertainty indicators to generate a sample set and divide the sample set into training sample set and test sample set;
- (d)
- Inputting the training sample set into the XGBoost model and adjusting the parameters to meet the accuracy requirements;
- (e)
- Import the sample data of the sectors to be measured into the model, and derive the prediction results.
3.2. Dynamic Boundary Optimization Model of FRA Sectors
3.2.1. Objective Function
3.2.2. Constraints
- (a)
- Convex constraint of the sector
- (b)
- Sector minimum flight time constraint
- (c)
- Safety distance constraint from the route intersection to the sector boundary
- (d)
- Crossing angle constraint between the route and the sector boundary
- (e)
- Constraint on the location of sector boundary and restricted area
- (f)
- Sector horizontal and vertical scale constraint
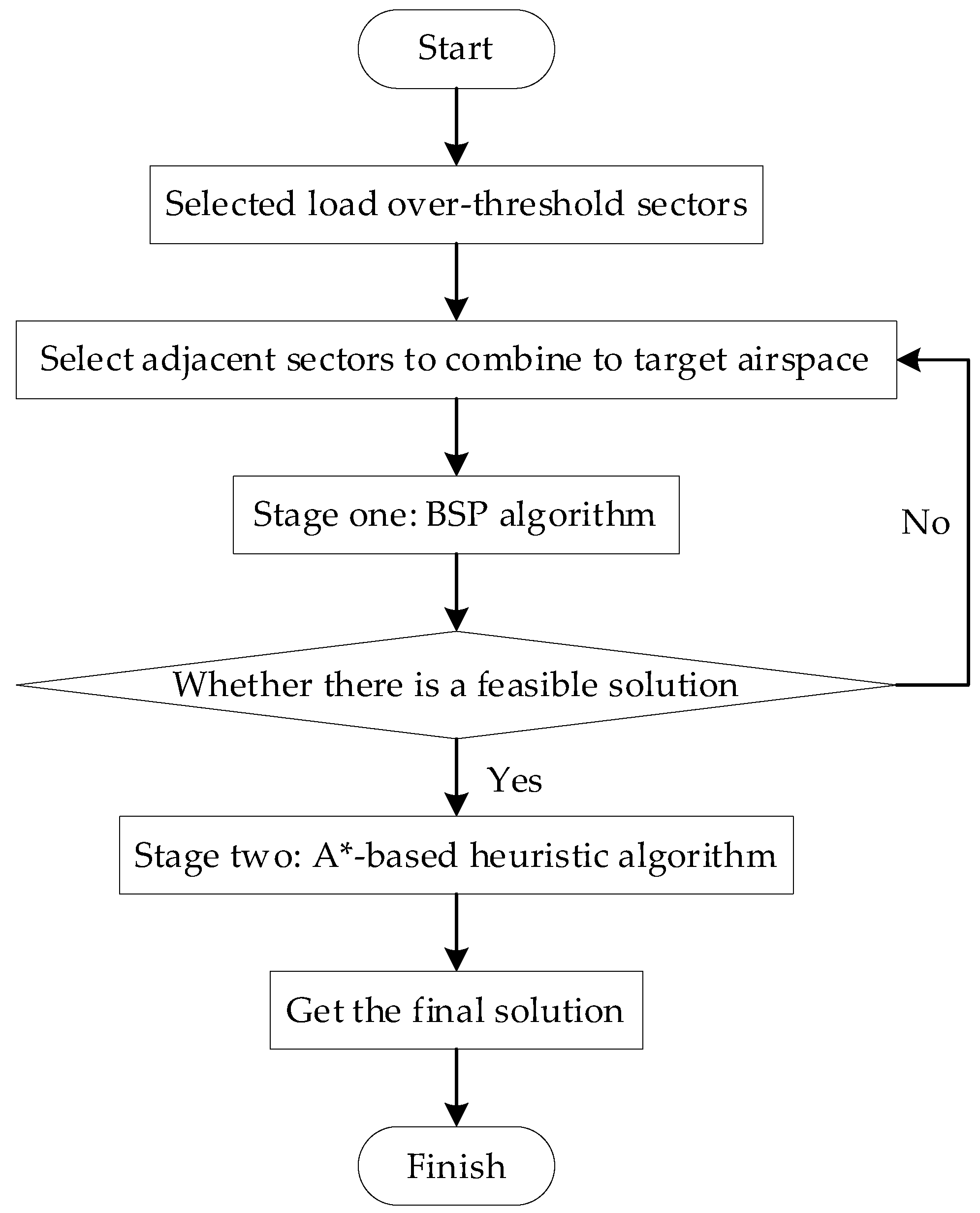
3.3. Two-Stage Boundary Generation and Tuning in FRA
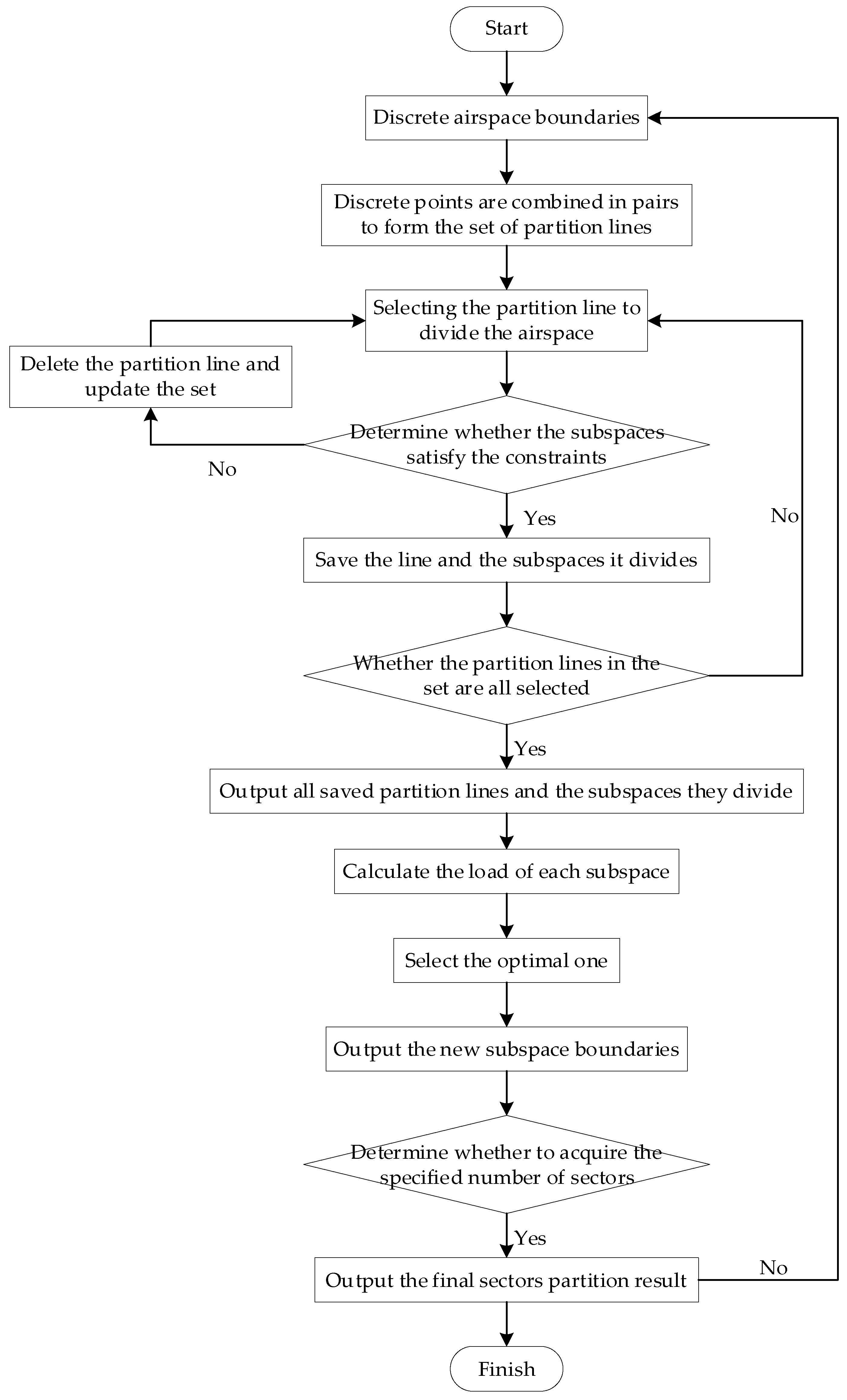
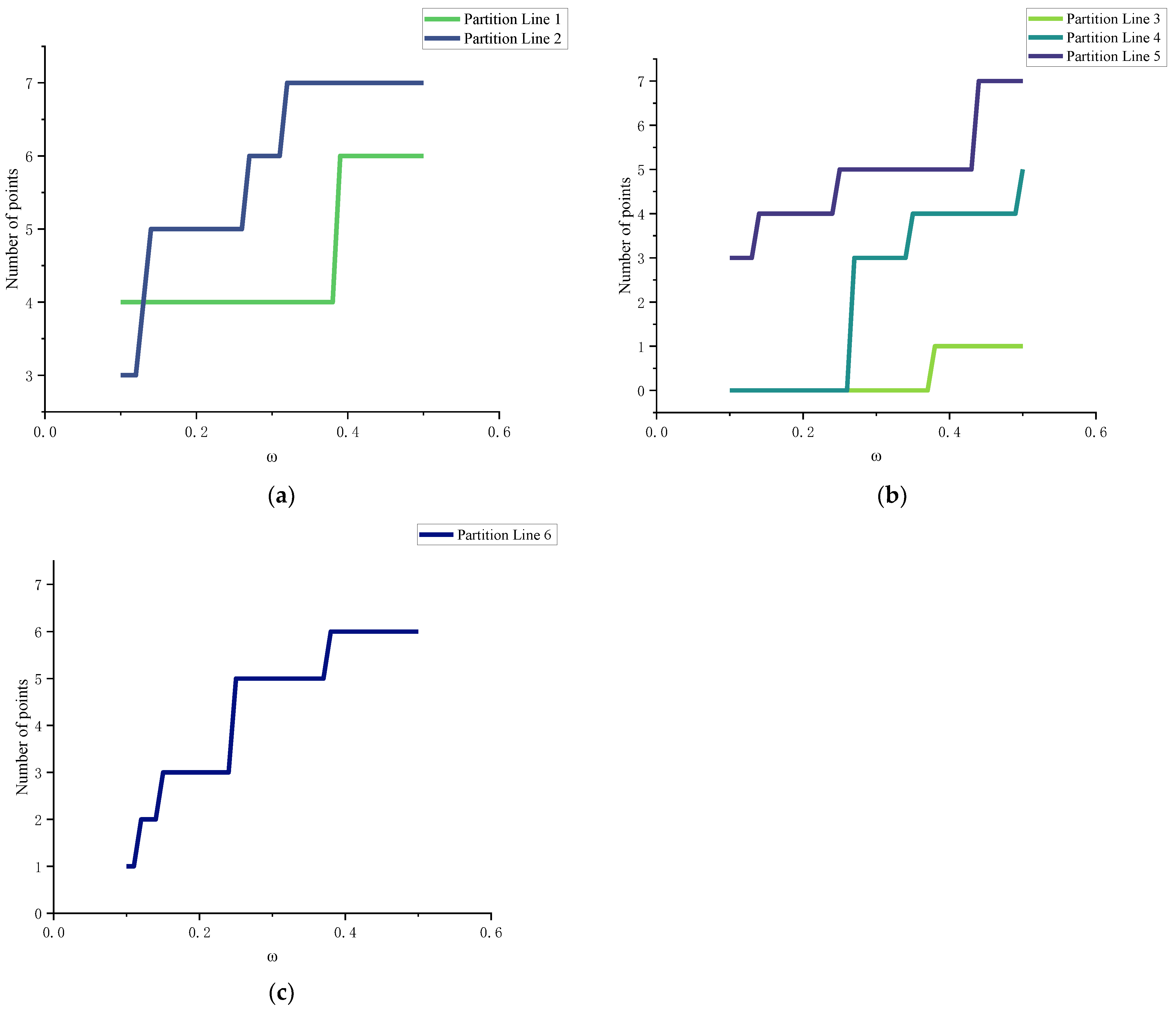
3.3.1. Binary Space Partition (BSP)
- (a)
- Discrete the airspace boundaries
- (b)
- Obtain the set of partition lines
- (c)
- Select the partition line to divide the airspace
- (d)
- Select the optimal partition line
- (e)
- Determine whether the number of subspaces is the same as before
| Algorithm 1: BSP algorithm pseudo-code |
| Input: Initial airspace boundaries, Number of Original Sectors: Output: BSP solution //Main procedure 1: Let current airspace = Initial airspace; 2: Discrete current airspace boundaries and obtain discrete points; 2: Obtain a set of partition lines by combine discrete points; 3: Calculate the number of the partition lines ; 4: for 5: if the partition line satisfies the constraints 6: then save line 7: end if 8: end for 10: Select the partition line with the lowest variance of the subspace workload; 11: Calculate the current number of subspaces ; 12: if Select the subspace with the highest workload; current airspace = selected subspace; Return step 2 End if |
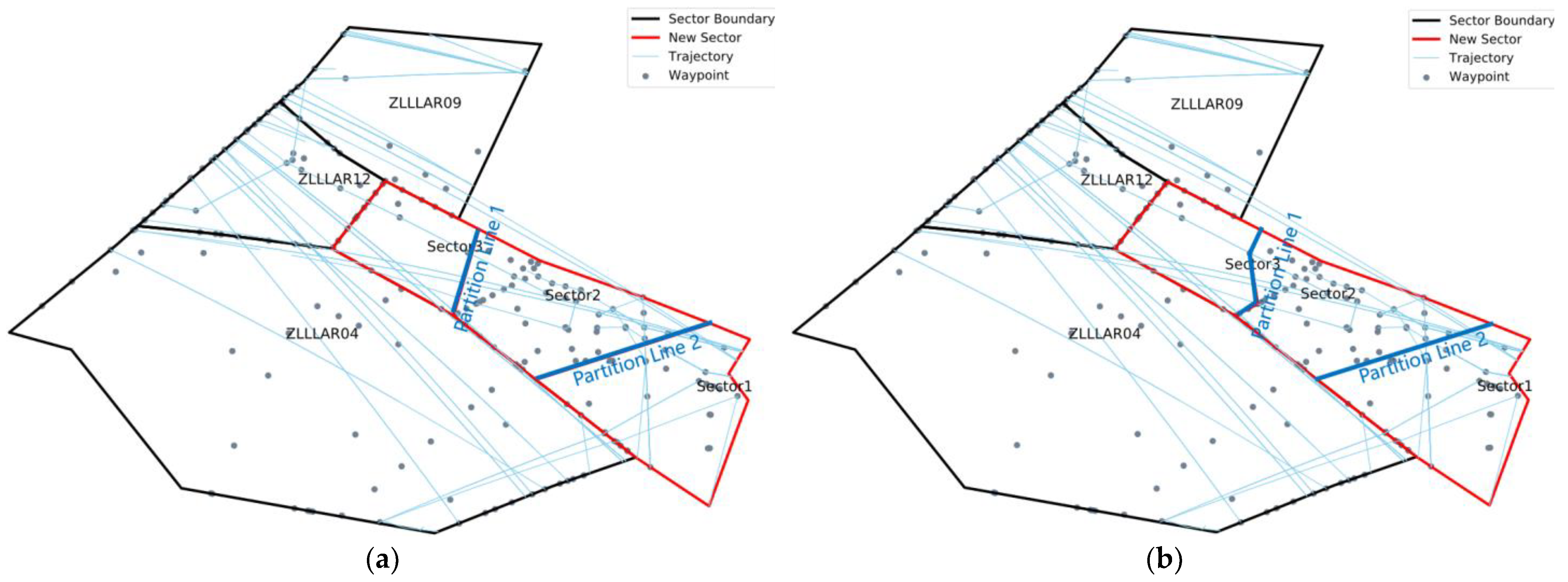
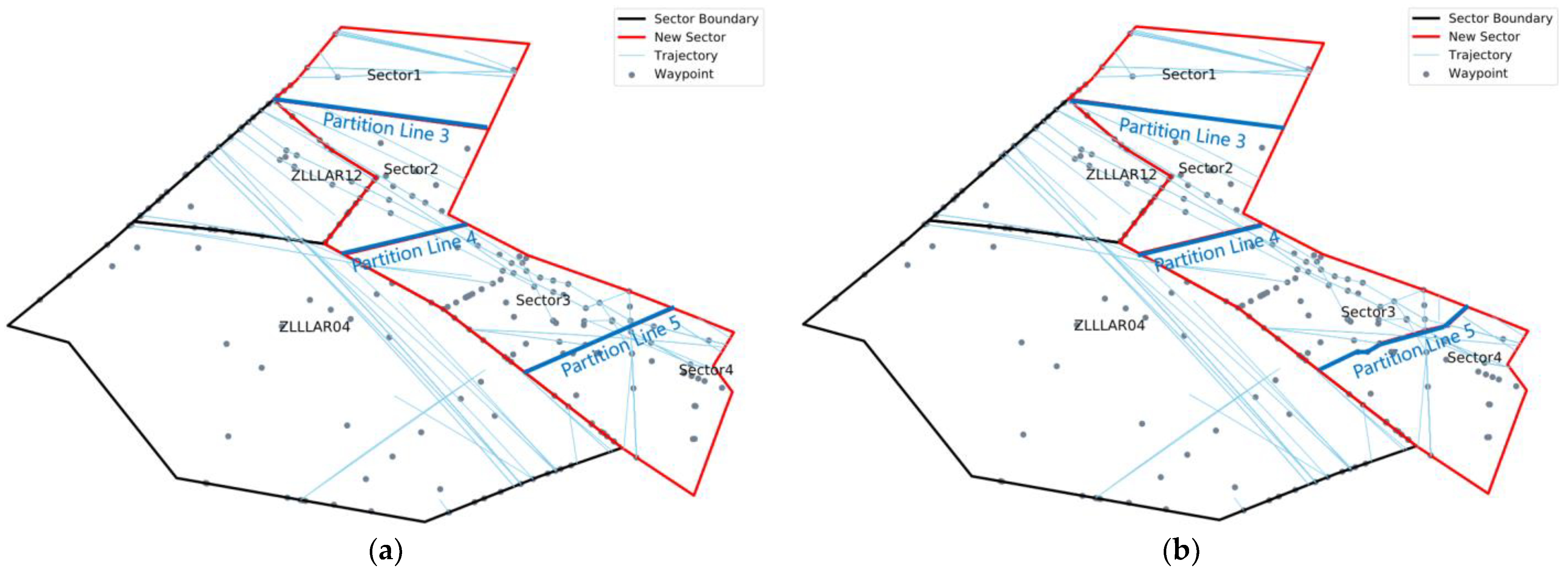
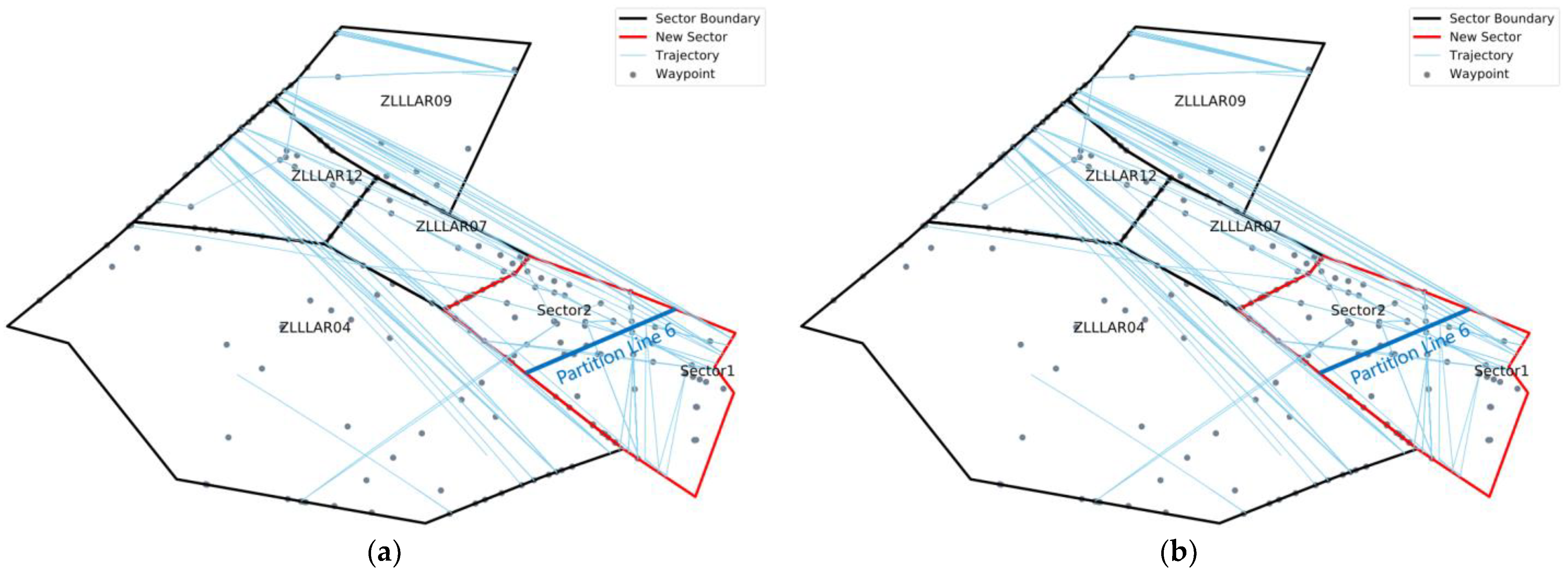
3.3.2. Sector Boundary Optimization Algorithm
- (a)
- Keeping the endpoint unchanged, the optimized line needs to connect as many waypoints as possible in the vicinity of the original partition line;
- (b)
- The optimized line is as similar as possible to the original partition line.
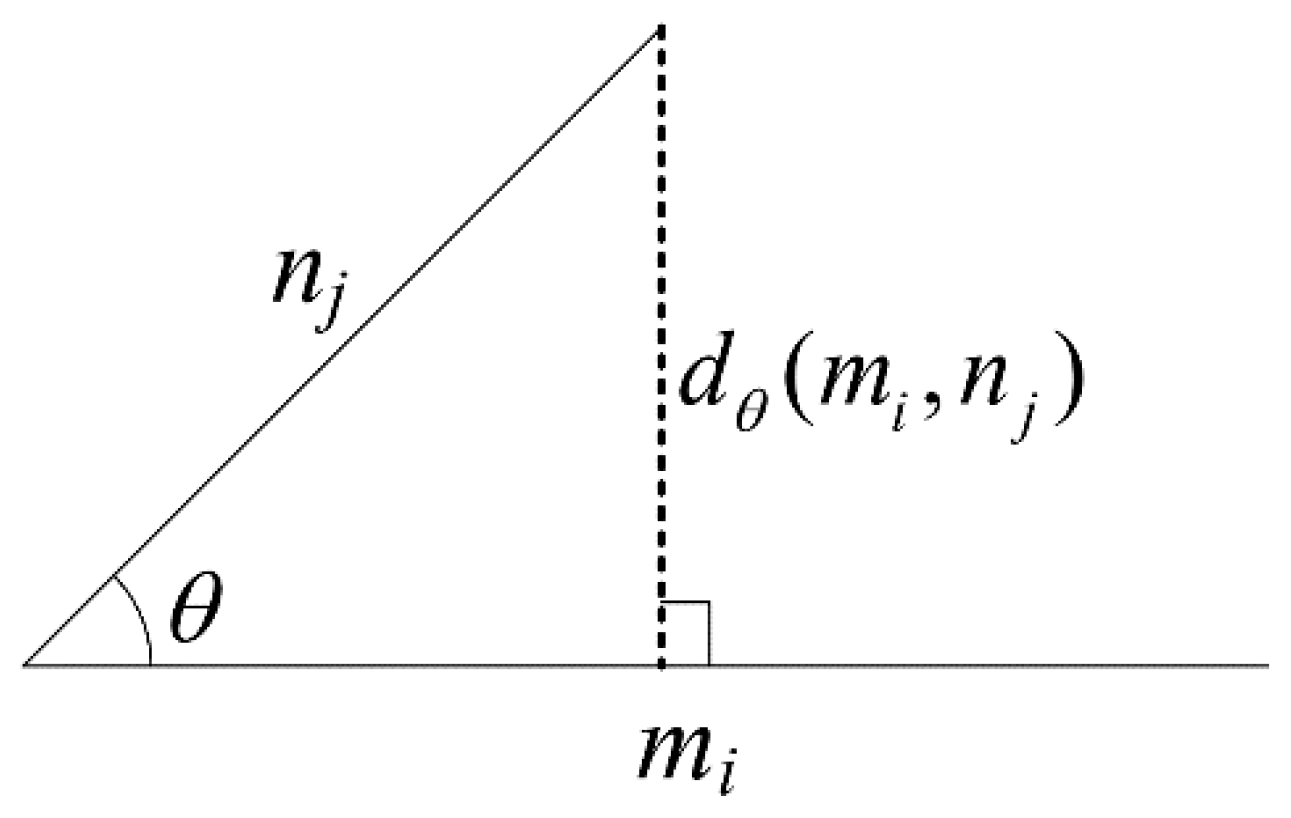
- (a)
- Angle distance
- (b)
- Vertical and parallel distance
- (c)
- Compensation distance
- (a)
- Filter connectable waypoints and known entry/exit points
- (b)
- Make the projections of each point on the original partition line
- (c)
- Number the points
- (d)
- Set the valuation function
- (e)
- Find the optimal partition line path
- (f)
- Verify the optimal partition line path
4. Case Analysis
4.1. Description of the Lanzhou en-Route Airspace Scenarios and Related Parameters Setting
4.2. Complexity Indicator Uncertainty Analysis and the Magnitude of Influence on Workload Estimation
4.3. Validation of Workload Estimation
4.4. Discussion of Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A







Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cluster 1 | MF |
| Cluster 2 | CI |
| AV | |
| SV | |
| TE | |
| OC | |
| MV | |
| TI | |
| FT | |
| AU | |
| CT |

Appendix C
| Event | Total Workload | Monitor | Air/Ground Communication | Height Statement | Conflict Detection | Conflict Resolution | Coordination |
|---|---|---|---|---|---|---|---|
| Sector Entry | 0:00:15 | 0:00:05 | 0:00:08 | 0:00:02 | |||
| Sector Exit | 0:00:10 | 0:00:08 | 0:00:02 | ||||
| Level Change | 0:00:08 | 0:00:08 | |||||
| Conflict Detection -crossing both cruising | 0:00:20 | 0:00:20 | |||||
| Conflict Detection—crossing both in vertical | 0:00:30 | 0:00:30 | |||||
| Conflict Detection—crossing one in vertical | 0:00:25 | 0:00:25 | |||||
| Conflict Detection—opposite both cruising | 0:00:20 | 0:00:20 | |||||
| Conflict Detection—opposite both in vertical | 0:00:30 | 0:00:30 | |||||
| Conflict Detection—opposite one in vertical | 0:00:25 | 0:00:25 | |||||
| Conflict Detection—same track both cruising | 0:00:10 | 0:00:10 | |||||
| Conflict Detection—same track both in vertical | 0:00:20 | 0:00:20 | |||||
| Conflict Detection—same track one in vertical | 0:00:15 | 0:00:15 | |||||
| Conflict Resolution—crossing both cruising | 0:00:40 | 0:00:40 | |||||
| Conflict Resolution—crossing both in vertical | 0:01:00 | 0:01:00 | |||||
| Conflict Resolution—crossing one in vertical | 0:00:45 | 0:00:45 | |||||
| Conflict Resolution—opposite both cruising | 0:01:10 | 0:01:10 | |||||
| Conflict Resolution—opposite both in vertical | 0:01:00 | 0:01:00 | |||||
| Conflict Resolution—opposite one in vertical | 0:00:50 | 0:00:50 | |||||
| Conflict Resolution—same track both cruising | 0:00:30 | 0:00:30 | |||||
| Conflict Resolution—same track both in vertical | 0:00:40 | 0:00:40 | |||||
| Conflict Resolution—same track one in vertical | 0:00:30 | 0:00:30 |
References
- Sergeeva, M. Automated Airspace Sectorization by Genetic Algorithm. Ph.D. Thesis, Université Paul Sabatier, Toulouse, France, 2017. [Google Scholar]
- Gaxiola, C.A.N.; Barrado, C.; Royo, P.; Pastor, E. Assessment of the North European free route airspace deployment. J. Air Transp. Manag. 2018, 73, 113–119. [Google Scholar] [CrossRef]
- Eurocontrol. Network Performance Plan 2020–2024; Eurocontrol: Brussels, Belgium, 2022. [Google Scholar]
- Kopardekar, P.; Bilimoria, K.; Sridhar, B. Initial concepts for dynamic airspace configuration. In Proceedings of the 7th AIAA ATIO Conference, 2nd CEIAT International Conference on Innovation and Integrity in Aero Sciences, 17th LTA Systems Tech Conference; Followed by 2nd TEOS Forum, Belfast, Ireland, 18–20 September 2017; AIAA: Belfast, Ireland, 2007; p. 7763. [Google Scholar]
- Hind, H.; El Omri, A.; Abghour, N.; Moussaid, K.; Rida, M. Dynamic airspace configuration: Review and open research issues. In Proceedings of the 2018 4th International Conference on Logistics Operations Management (GOL), Le Havre, France, 10–12 April 2018; pp. 1–7. [Google Scholar]
- Rahman, S.M.A.; Borst, C.; Mulder, M.; van Paassen, R. Sector complexity measures: A comparison. J. Teknol. 2015, 76, 131–139. [Google Scholar]
- Xie, H.; Zhang, M.; Ge, J.; Dong, X.; Chen, H. Learning air traffic as images: A deep convolutional neural network for airspace operation complexity evaluation. Complexity 2021, 2021, 6457246. [Google Scholar] [CrossRef]
- Kudumija, D.; Antulov-Fantulin, B.; Andraši, P.; Rogošić, T. The effect of the Croatian Free Route Airspace implementation on the Air Traffic Complexity. Transp. Res. Procedia 2022, 64, 356–363. [Google Scholar] [CrossRef]
- Cao, X.; Zhu, X.; Tian, Z.; Chen, J.; Wu, D.; Du, W. A knowledge-transfer-based learning framework for airspace operation complexity evaluation. Transp. Res. Part C Emerg. Technol. 2018, 95, 61–81. [Google Scholar] [CrossRef]
- García, A.; Delahaye, D.; Soler, M. Air traffic complexity map based on linear dynamical systems. Aerospace 2022, 9, 230. [Google Scholar]
- Isufaj, R.; Omeri, M.; Piera, M.A.; Saez Valls, J.; Verdonk Gallego, C. From Single Aircraft to Communities: A Neutral Interpretation of Air Traffic Complexity Dynamics. Aerospace 2022, 9, 613. [Google Scholar] [CrossRef]
- Manning, C.A.; Pfleiderer, E.M. Relationship of Sector Activity and Sector Complexity to Air Traffic Controller Taskload; Department of Transportation; Federal Aviation Administration: Washington, DC, USA, 2006. [Google Scholar]
- Gianazza, D.; Guittet, K. Selection and evaluation of air traffic complexity metrics. In Proceedings of the 2006 IEEE/AIAA 25TH Digital Avionics Systems Conference, Portland, OR, USA, 15–18 October 2006; pp. 1–12. [Google Scholar]
- Gianazza, D. Forecasting workload and airspace configuration with neural networks and tree search methods. Artif. Intell. 2010, 174, 530–549. [Google Scholar] [CrossRef] [Green Version]
- Loft, S.; Sanderson, P.; Neal, A.; Mooij, M. Modeling and predicting mental workload in en route air traffic control: Critical review and broader implications. Hum. Factors 2007, 49, 376–399. [Google Scholar] [CrossRef] [Green Version]
- Marr, B.; Lindsay, K. Controller workload-based calculation of monitor alert parameters for en route sectors. In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015; p. 3178. [Google Scholar]
- Yousefi, A.; Donohue, G. Temporal and spatial distribution of airspace complexity for air traffic controller workload-based sectorization. In Proceedings of the AIAA 4th Aviation Technology, Integration and Operations (ATIO) Forum, Los Angeles, CA, USA, 20 September 2004; p. 6455. [Google Scholar]
- Kulkarni, S.; Ganesan, R.; Sherry, L. Static sectorization approach to dynamic airspace configuration using approximate dynamic programming. In Proceedings of the 2011 Integrated Communications, Navigation, and Surveillance Conference Proceedings, Herndon, VA, USA, 10–12 May 2011; pp. J2-1–J2-9. [Google Scholar]
- Faulkner, L.; McFadyen, A. Air Traffic Configuration Modelling and Dynamic Airspace Allocation using Discrete-Time Markov Chains. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 4483–4488. [Google Scholar]
- Temizkan, S.; SİPahİOĞLu, A. A mathematical model suggestion for airspace sector design. J. Fac. Eng. Archit. Gazi Univ. 2016, 31, 4. [Google Scholar]
- Mohammed, G.; El Bekkaye, M. Fuzzy Dynamic Airspace Sectorization Problem. In Machine Intelligence and Data Analytics for Sustainable Future Smart Cities; Springer: Berlin/Heidelberg, Germany, 2021; pp. 229–250. [Google Scholar]
- Wei, J.; Hwang, I.; Hall, W. Mathematical programming based algorithm for dynamic terminal airspace configuration. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Indianapolis, IN, USA, 17–19 September 2012. [Google Scholar]
- Wei, J.; Sciandra, V.J.; Hwang, I.; Hall, W.D. An integer programming based sector design algorithm for terminal dynamic airspace configuration. In Proceedings of the 2013 Aviation Technology, Integration, and Operations Conference, Los Angeles, CA, USA, 12–14 August 2013; p. 4260. [Google Scholar]
- Wei, J.; Sciandra, V.; Hwang, I.; Hall, W.D. Design and evaluation of a dynamic sectorization algorithm for terminal airspace. J. Guid. Control Dyn. 2014, 37, 1539–1555. [Google Scholar] [CrossRef]
- Klein, A.; Rodgers, M.D.; Kaing, H. Dynamic FPAs: A new method for dynamic airspace configuration. In Proceedings of the 2008 Integrated Communications, Navigation and Surveillance Conference, Bethesda, MD, USA, 5–7 May 2008; pp. 1–11. [Google Scholar]
- Xue, M. Airspace sector redesign based on Voronoi diagrams. J. Aerosp. Comput. Inf. Commun. 2009, 6, 624–634. [Google Scholar] [CrossRef]
- Yousefi, A.; Khorrami, B.; Hoffman, R.; Hackney, B. Enhanced Dynamic Airspace Configuration Algorithms and Concepts; Technical Report No. 34N1207-001-R0; Metron Aviation Inc.: Herndon, VA, USA, 2007. [Google Scholar]
- Basu, A.; Mitchell, J.S.; Sabhnani, G.K. Geometric algorithms for optimal airspace design and air traffic controller workload balancing. J. Exp. Algorithm. 2010, 14, 2.3–2.28. [Google Scholar]
- Tang, J.; Alam, S.; Lokan, C.; Abbass, H.A. A multi-objective approach for dynamic airspace sectorization using agent based and geometric models. Transp. Res. Part C Emerg. Technol. 2012, 21, 89–121. [Google Scholar] [CrossRef]
- Li, J.; Wang, T.; Savai, M.; Hwang, I. Graph-based algorithm for dynamic airspace configuration. J. Guid. Control Dyn. 2010, 33, 1082–1094. [Google Scholar] [CrossRef]
- Cao, H.; Wu, X.; Zhou, F.; Wang, T. Dynamic airspace sector configuration based on bi-partitioned method. In Proceedings of the 2015 7th International Conference on Modelling, Identification and Control (ICMIC), Sousse, Tunisia, 18–20 December 2015; pp. 1–4. [Google Scholar]
- Ghorpade, S. Airspace configuration model using swarm intelligence based graph partitioning. In Proceedings of the 2016 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Vancouver, BC, Canada, 15–18 May 2016; pp. 1–5. [Google Scholar]
- Zou, X.; Cheng, P.; An, B.; Song, J. Sectorization and configuration transition in airspace design. Math. Probl. Eng. 2016, 2016, 6048326. [Google Scholar] [CrossRef] [Green Version]
- Yao, D.; Wang, Y. Two-Stage Model and Algorithm for Airspace and Traffic Flow Collaborative Programming Based on Dynamic Sectorization. J. Northwest. Polytech. Univ. 2016, 34, 549–557. [Google Scholar]
- Brinton, C.R.; Pledgie, S. Airspace partitioning using flight clustering and computational geometry. In Proceedings of the 2008 IEEE/AIAA 27th Digital Avionics Systems Conference, Salt Lake City, UT, USA, 26–30 October 2008; pp. 3. B. 3-1–3. B. 3-10. [Google Scholar]
- Kopardekar, P.; Magyarits, S. Measurement and prediction of dynamic density. In Proceedings of the 5th USA/Europe Air Traffic Management R&D Seminar, Budapest, Hungary, 23–27 June 2003. [Google Scholar]
- Lucic, P.; Klein, A.; Leiden, K.; Brinton, C. A template-based approach to Dynamic Airspace Configuration in presence of weather. In Proceedings of the 2013 IEEE/AIAA 32nd Digital Avionics Systems Conference (DASC), East Syracuse, NY, USA, 5–10 October 2013; pp. 1D5-1–1D5-14. [Google Scholar]
- Martinez, S.; Chatterji, G.; Sun, D.; Bayen, A. A weighted-graph approach for dynamic airspace configuration. In Proceedings of the Aiaa Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6448. [Google Scholar]
- Gerdes, I.; Temme, A.; Schultz, M. Dynamic airspace sectorization using controller task load. In Proceedings of the 6th SESAR Innovation Days, Delft, The Netherlands, 8–10 November 2016. [Google Scholar]
- Gerdes, I.; Temme, A.; Schultz, M. Dynamic airspace sectorisation for flight-centric operations. Transp. Res. Part C Emerg. Technol. 2018, 95, 460–480. [Google Scholar] [CrossRef]
- Standfuß, T.; Gerdes, I.; Temme, A.; Schultz, M. Dynamic airspace optimisation. CEAS Aeronaut. J. 2018, 9, 517–531. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, D. Dynamic airspace configuration method based on a weighted graph model. Chin. J. Aeronaut. 2014, 27, 903–912. [Google Scholar] [CrossRef] [Green Version]
- Lema-Esposto, M.F.; Amaro-Carmona, M.Á.; Valle-Fernández, N.; Iglesias-Martínez, E.; Fabio-Bracero, A. Optimal Dynamic Airspace Configuration (DAC) based on State-Task Networks (STN). In Proceedings of the 11th SESAR Innovation Days, Online, 7–9 December 2021. [Google Scholar]
- Sergeeva, M.; Delahaye, D.; Zerrouki, L.; Schede, N. Dynamic airspace configurations generated by evolutionary algorithms. In Proceedings of the 2015 IEEE/AIAA 34th Digital Avionics Systems Conference (DASC), Prague, Czech Republic, 13–17 September 2015; pp. 1F2-1–1F2-15. [Google Scholar]
- Sergeeva, M.; Delahaye, D.; Mancel, C.; Vidosavljevic, A. Dynamic airspace configuration by genetic algorithm. J. Traffic Transp. Eng. 2017, 4, 300–314. [Google Scholar] [CrossRef]
- Liu, J.; Lan, S.; Jiang, H.; Xu, C. Research on Situational Awareness of Controllers based on Human Factors. Chin. J. Ergon. 2021, 27, 51–56. [Google Scholar]
- Li, H.; Wang, Y.-P. Research on Sector Dynamic Traffic Capacity Based on Airspace Complexity. Aeronaut. Comput. Tech. 2019, 49, 79–83. [Google Scholar]
- Gomez Comendador, V.F.; Arnaldo Valdés, R.M.; Vidosavljevic, A.; Sanchez Cidoncha, M.; Zheng, S. Impact of trajectories’ uncertainty in existing ATC complexity methodologies and metrics for DAC and FCA SESAR concepts. Energies 2019, 12, 1559. [Google Scholar] [CrossRef] [Green Version]
- Gomez Comendador, V.F.; Arnaldo Valdés, R.M.; Villegas Diaz, M.; Puntero Parla, E.; Zheng, D. Bayesian network modelling of ATC complexity metrics for future SESAR demand and capacity balance solutions. Entropy 2019, 21, 379. [Google Scholar] [CrossRef] [Green Version]
- Cong, W.; Hu, M.H.; Xie, H.; Zhang, C. An Evaluation Method of Sector Complexity Based on Metrics System. J. Transp. Syst. Eng. Inf. Technol. 2015, 15, 136. [Google Scholar]
- Djokic, J.; Lorenz, B.; Fricke, H. Air traffic control complexity as workload driver. Transp. Res. Part C Emerg. Technol. 2010, 18, 930–936. [Google Scholar] [CrossRef]
- Li, S.; Qin, J.; He, M.; Paoli, R. Fast Evaluation of Aircraft Icing Severity Using Machine Learning Based on XGBoost. Aerospace 2020, 7, 36. [Google Scholar] [CrossRef]
- Wang, Y. Research on Airspace Sector Dynamic Planning and Optimization. Master’s Thesis, Civil Aviation University of China, Tianjin, China, 2020. [Google Scholar]
- Sherali, H.D.; Hill, J.M. Configuration of airspace sectors for balancing air traffic controller workload. Ann. Oper. Res. 2013, 203, 3–31. [Google Scholar] [CrossRef]
- Zhang, M. Research on Key Problems of Terminal Airspace’s Sector Planning and Operation Management; Nanjing University of Aeronautics and Astronautics: Nanjing, China, 2010. [Google Scholar]
- Wang, C.; Chen, Y. Large-scale airspace sector partitioning based on binary space partitions and dynamic programming. Appl. Res. Comput. 2015, 32, 3259–3263. [Google Scholar]
- Mitchell, J.; Sabhnani, G.; Hoffman, R.; Krozel, J.; Yousefi, A. Dynamic airspace configuration management based on computational geometry techniques. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Monterey, CA, USA, 5–8 August 2008; p. 7225. [Google Scholar]
- Chen, J.; Leung, M.K.; Gao, Y. Noisy logo recognition using line segment Hausdorff distance. Pattern Recognit. 2003, 36, 943–955. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Feng, S.; Song, M.; Hu, L.; Lu, S. Prediction method of aircraft dynamic taxi time based on XGBoost. Adv. Aeronaut. Sci. Eng. 2022, 13, 76–85. [Google Scholar]
- Nguyen, T.V.; Huynh, N.-T.; Vu, N.-C.; Kieu, V.N.; Huang, S.-C. Optimizing compliant gripper mechanism design by employing an effective bi-algorithm: Fuzzy logic and ANFIS. Microsyst. Technol. 2021, 27, 3389–3412. [Google Scholar] [CrossRef]
- Wang, C.-N.; Yang, F.-C.; Nguyen, V.T.T.; Vo, N.T.M. CFD analysis and optimum design for a centrifugal pump using an effectively artificial intelligent algorithm. Aerospace 2022, 13, 1208. [Google Scholar] [CrossRef]













| Complexity Indicator | Abbreviation | Note |
|---|---|---|
| Number of Main Flows [47] | MF | |
| Main Flow Variation | MV | the standard deviation of the distribution of flight volume over the main traffic flows |
| Number of Trajectory Intersection | TI | the number of track intersections formed by the intersection of aircraft trajectories |
| Conflict Intensity | CI | the value of conflict intensity between aircraft pairs increases as the spatial distance between aircraft pairs decreases |
| Airspace uses [49] | AU | |
| Altitude Variation | AV | the standard deviation of the flight altitude for all aircraft |
| Speed Variation | SV | the standard deviation of flight speed for all aircraft |
| Occupancy (per ATCO position) | OC | the number of aircrafts at a given time instant |
| Traffic Entry (per ATCO position) [50] | TE | |
| The total flight time of the aircraft under ATCO responsibility in the given timeframe | FT | the controlled flight time for all aircraft |
| Number of control transfers [51] | CT |
| Experimental Parameter Name | Value |
|---|---|
| Maximum number of intersections between the route and the sector boundaries | 2 pcs |
| Time required for the execution of a single control transfer | 5 min |
| The shortest distance between the route intersection and the sector boundary | 10,000 m |
| Minimum intersection angle between route and sector boundary | |
| Minimum Sector Horizontal-to-vertical Ratio | 0.3 |
| High-Level Indicator | MF |
|---|---|
| Medium-level Indicator | CI AV SV |
| Low-level Indicator | TE |
| OC MV TI FT AU CT |
| Low Impact | Medium Impact | High Impact | |
|---|---|---|---|
| High uncertainty | MF | ||
| Medium uncertainty | SV | CI | |
| AV | |||
| Low uncertainty | MV | TE | TI AU |
| CT | OC | ||
| FT |
| Evaluation Parameters | Evaluation Result |
|---|---|
| RMSE | 11.16817 |
| MAE | 6.80012 |
| 0.89597 |
| Error | ±2 | ±4 | ±6 | ±8 | ±10 |
| Accuracy | 43.635% | 60.447 | 81.692% | 94.956% | 96.884% |
| Before | After One-Stage | After Two-Stage | |||||
|---|---|---|---|---|---|---|---|
| 10:00–10:59 | 11:00–11:59 | 10:00–10:59 | 11:00–11:59 | 10:00–10:59 | 11:00–11:59 | ||
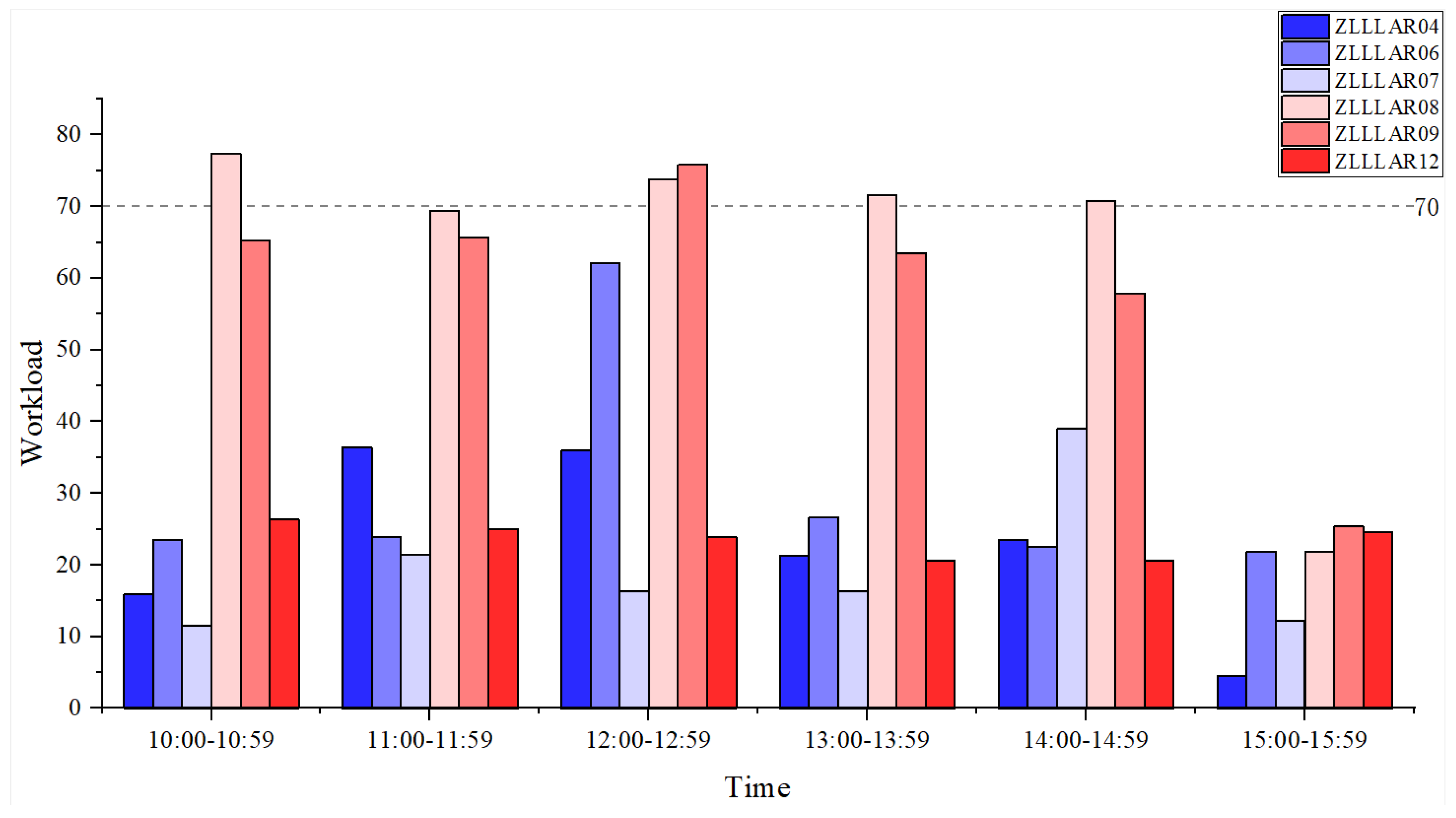
| ZLLLAR06 | 23.5529 | 23.8674 | Sector 1 | 68.8843 | 60.4926 | 68.8843 | 60.4926 |
| ZLLLAR07 | 11.5431 | 21.3622 | Sector 2 | 65.5155 | 58.6889 | 65.5155 | 58.6889 |
| ZLLLAR08 | 77.3584 | 69.3848 | Sector 3 | 14.9662 | 12.2904 | 14.9662 | 12.2904 |
| Before | After One-Stage | After Two-Stage | |||||
|---|---|---|---|---|---|---|---|
| 12:00–12:59 | 13:00–13:59 | 12:00–12:59 | 13:00–13:59 | 12:00–12:59 | 13:00–13:59 | ||
| ZLLLAR06 | 62.0566 | 26.6573 | Sector 1 | 23.8674 | 65.2802 | 23.8674 | 65.2802 |
| ZLLLAR07 | 16.336 | 16.336 | Sector 2 | 63.8403 | 57.8604 | 63.8403 | 57.8604 |
| ZLLLAR08 | 73.7572 | 71.565 | Sector 3 | 69.565 | 51.9123 | 68.7609 | 51.9123 |
| ZLLLAR09 | 75.7915 | 63.5467 | Sector 4 | 68.5118 | 59.1439 | 68.5118 | 59.9098 |
| Before | After One-Stage | After Two-Stage | |||||
|---|---|---|---|---|---|---|---|
| 14: 00–14:59 | 15:00–15:59 | 14: 00–14:59 | 15:00–15:59 | 14: 00–14:59 | 15:00–15:59 | ||
| ZLLLAR06 | 22.5844 | 21.813 | Sector 1 | 69.142 | 37.879 | 69.142 | 37.879 |
| ZLLLAR08 | 70.7609 | 21.813 | Sector 2 | 23.8674 | 21.813 | 23.8674 | 21.813 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Huang, J.; Gao, Q.; Zhou, Y.; Hu, M.; Xie, H. Dynamic Boundary Optimization of Free Route Airspace Sectors. Aerospace 2022, 9, 832. https://doi.org/10.3390/aerospace9120832
Yang L, Huang J, Gao Q, Zhou Y, Hu M, Xie H. Dynamic Boundary Optimization of Free Route Airspace Sectors. Aerospace. 2022; 9(12):832. https://doi.org/10.3390/aerospace9120832
Chicago/Turabian StyleYang, Lei, Jue Huang, Qi Gao, Yi Zhou, Minghua Hu, and Hua Xie. 2022. "Dynamic Boundary Optimization of Free Route Airspace Sectors" Aerospace 9, no. 12: 832. https://doi.org/10.3390/aerospace9120832
APA StyleYang, L., Huang, J., Gao, Q., Zhou, Y., Hu, M., & Xie, H. (2022). Dynamic Boundary Optimization of Free Route Airspace Sectors. Aerospace, 9(12), 832. https://doi.org/10.3390/aerospace9120832