
A Multi-Objective Factorial Design Methodology for Aerodynamic Off-Takes and Ducts


Abstract
:1. Introduction
- (A)
- Simplify and parametrically model the conceptual design.
- (B)
- Select and evaluate a suitable approach to sample the design space.
- (C)
- Define a set of quality evaluation criteria (design objectives).
- (D)
- Develop a multi-objective characterisation methodology.
- (E)
- Characterise the design space.
- (F)
- Select and evaluate a set of nominal geometries to advance to the next stage of the design process.
2. Methodology
2.1. Modelling Assumptions and Limitations
2.2. Sampling Approach
- (a)
- It is much more efficient in the estimation of the main effects, i.e., it allows direct evaluation of the design variable interactions.
- (b)
- The complete dataset is available a priori which facilitates weighting of the multi-objective functions.
- (c)
- It is relatively simple to apply, and it does not require an expertise in advanced optimisation algorithms.
2.3. Design Space Reduction
3. Model Setup Details
3.1. Input Variables
- (a)
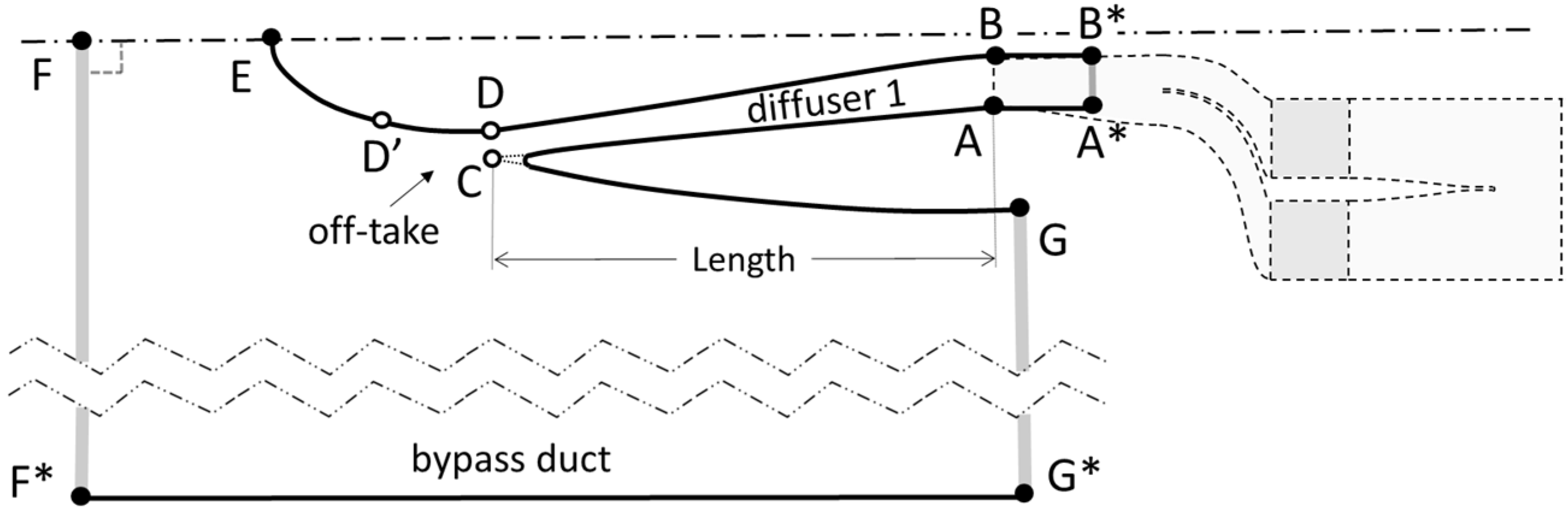
- The axial extent of diffuser 1 (A–C) referred to as “Length”. This variable implicitly determines the position of the off-take along the strut. Low values of length correspond to flush off-takes and high values to total off-takes.
- (b)
- The “Angle” of the off-take (C–A) relative to the local slope of the strut (E–G). At a 0° angle the duct would locally be parallel to the strut surface.
- (c)
- The “Height” of the off-take which is explicitly defined by the distance C–D.
3.2. Design Objectives
3.3. Multi-Objective Function
- (a)
- The contribution of the bifurcation strut blockage to the bypass duct loss in model 1.
- (b)
- The HX loss in the overall CCA duct loss of model 2.
- (c)
- The turbulence intensity at the inlet of model 2 in the kinetic energy ratio.
3.4. Numerical Simulation Setup
4. Model 1 Results and Discussion
4.1. DoE 1 Data Sampling and Objective Function Conditioning
- (a)
- total pressure loss in the delivery duct against diffuser 1 exit non-uniformity,
- (b)
- total pressure loss in the bypass duct against diffuser 1 exit non-uniformity and
- (c)
- total pressure loss in the delivery duct against the one in the bypass duct.
4.2. DoE 1 System Response Analysis and Optimisation
- (a)
- There is a positive velocity gradient in the streamwise direction due to the strut curvature, i.e., the velocity near the leading edge is lower. Therefore, the pre-diffusion requirement of the captured stream-tube is reduced near the leading edge.
- (b)
- At the leading edge of the strut the off-take can fully exploit the dynamic pressure of the bypass stream, a general advantage of total off-takes over flush off-takes.
5. Model 2 Results and Discussion
5.1. DoE 2 and DoE 3 Data Sampling and Objective Function Conditioning
 ) and total pressure , all normalised by suitable reference values to facilitate the comparison.
) and total pressure , all normalised by suitable reference values to facilitate the comparison.- (1)
- Total pressure loss across the system.
- (2)
- Non-uniformity of the velocity magnitude at the inlet of the HX.
- (3)
- Kinetic energy ratio in the delivery duct.
5.2. DoE 2 and DoE 3 System Response Analysis
5.3. DoE 2 and DoE 3 Single Objective Optima
5.4. DoE 2 and DoE 3 Multi Objective Optima
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BPD | Bypass duct |
| CCA | Cooled Cooling Air |
| DoE | Design of Experiments |
| HP | High Pressure |
| HX | Heat Exchanger |
| LP | Low Pressure |
| MKE | Mean Flow Kinetic Energy |
| OGV | Outlet Guide Vane |
| PR | Fan Pressure Ratio |
| TKE | Turbulence kinetic energy |
| Symbols | |
| Area | |
| Vector of objective functions | |
| Utopia point | |
| ( | Fixed offset of utopia point |
| Vector of critical values | |
| Vector of observed minima | |
| Heat exchanger height, used as reference length | |
| Turbulence kinetic energy | |
| Kinetic energy ratio | |
| Total pressure | |
| Vector of Bezier curve control points | |
 | Production of turbulence kinetic energy |
| Static pressure | |
| Dynamic pressure | |
| Vector of scaling coefficients | |
| Velocity magnitude | |
| Volume | |
| Vector of weighting coefficients | |
| γ | Uniformity index of velocity |
| λ | Total pressure loss coefficient |
| Density | |
| Multi-objective function | |
| Area-weighted averaging operator | |
| Mass-weighted averaging operator | |
| Indices | |
| Captured stream-tube (at CFD inlet plane) | |
| Target zone | |
| Grid cell ID and objective function ID |
References
- Walker, A.D.; Koli, B.R.; Spanelis, A.; Beecroft, P. Aerodynamic design of a cooled cooling air system for an aero gas turbine. In Proceedings of the 23rd International Symposium on Air Breathing Engines (ISABE), Manchester, UK, 3–8 September 2017; p. 21302. [Google Scholar]
- Seddon, J.; Goldsmith, E.L. Intake Aerodynamics; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 1999. [Google Scholar]
- ESDU. Drag and Pressure Recovery Characteristics of Auxiliary Air Inlets at Subsonic Speeds, Data Item 86002. 2004. Available online: https://www.esdu.com/cgi-bin/ps.pl?sess=unlicensed_1220228235802lyz&t=doc&p=esdu_86002d (accessed on 10 January 2022).
- ESDU. Subsonic Drag and Pressure Recovery of Rectangular Planform Flush Auxiliary Inlets with Ducts at Angles up to 90 Degrees, Data Item 03006. 2003. Available online: https://www.esdu.com/cgi-bin/ps.pl?sess=unlicensed_1220301000538lks&t=doc&p=esdu_03006 (accessed on 13 January 2022).
- Walker, A.D.; Carrotte, J.F.; Rolt, A.M. Duct aerodynamics for intercooled aero gas turbines: Constraints, concepts and design methodology. In Proceedings of the ASME Turbo Expo 2009: Power for Land, Sea, and Air, Orlando, FL, USA, 8–12 June 2009; Volume 7, pp. 749–758. [Google Scholar] [CrossRef]
- Spanelis, A.; Walker, A.D. Aerodynamic Influence of a Bleed on the Last Stage of a Low-Pressure Compressor and S-Duct. J. Turbomach. 2022, 144, 021007. [Google Scholar] [CrossRef]
- Clemen, C.; Albrecht, P.; Herzog, S. Systematic Optimisation of a Turbofan Bypass Duct System. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: Copenhagen, Denmark, 2013; pp. 1655–1666. [Google Scholar] [CrossRef]
- Shah, R.K.; Sekulic, D.P. Fundamentals of Heat Exchanger Design; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Spanelis, A.; Walker, A.D.; Beecroft, P.A. The Aerodynamic Design of the Low Pressure Air Delivery Ducts for a Cooled Cooling Air System. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: Charlotte, NC, USA, 2017; Volume 50794, p. V02BT42A007. [Google Scholar] [CrossRef]
- Gudmundsson, S. General Aviation Aircraft Design: Applied Methods and Procedures; Butterworth-Heinemann: Oxford, UK, 2014; pp. 1–32. [Google Scholar] [CrossRef]
- A’Barrow, C.; Carrotte, J.F.; Walker, A.D.; Rolt, A.M. Aerodynamic Performance of a Coolant Flow Off-Take Downstream of an Outlet Guide Vane. J. Turbomach. 2012, 135, 011006. [Google Scholar] [CrossRef]
- Jirasek, A. Design of Vortex Generator Flow Control in Inlets. J. Aircr. 2006, 43, 1886–1892. [Google Scholar] [CrossRef]
- Hamstra, J.W.; Miller, D.N.; Truax, P.P.; Anderson, B.A.; Wendt, B.J. Active inlet flow control technology demonstration. Aeronaut. J. 2000, 104, 473–479. [Google Scholar]
- Yurko, I.; Bondarenko, G. A New Approach to Designing the S-Shaped Annular Duct for Industrial Centrifugal Compressor. Int. J. Rotating Mach. 2014, 2014, 925368. [Google Scholar] [CrossRef] [Green Version]
- Chen, V.C.; Tsui, K.-L.; Barton, R.R.; Meckesheimer, M. A review on design, modeling and applications of computer experiments. IIE Trans. 2006, 38, 273–291. [Google Scholar] [CrossRef]
- Yondo, R.; Andrés, E.; Valero, E. A review on design of experiments and surrogate models in aircraft real-time and many-query aerodynamic analyses. Prog. Aerosp. Sci. 2018, 96, 23–61. [Google Scholar] [CrossRef]
- Klein, A. Characteristics of combustor diffusers. Prog. Aerosp. Sci. 1995, 31, 171–271. [Google Scholar] [CrossRef]
- Kwan, P.-W.; Gillespie, D.R.H.; Stieger, R.D.; Rolt, A.M. Minimising loss in a heat exchanger installation for an intercooled turbofan engine. In Proceedings of the ASME 2011 Turbo Expo: Turbine Technical Conference and Exposition, Vancouver, BC, Canada, 6–10 June 2011; Volume 1, pp. 189–200. [Google Scholar] [CrossRef]
- Raul, A.; Bhasme, B.; Maurya, R. A Numerical Investigation of Fluid Flow Maldistribution in Inlet Header Configuration of Plate Fin Heat Exchanger. Energy Procedia 2016, 90, 267–275. [Google Scholar] [CrossRef]
- Schiavo, L.A.C.A.; Wolf, W.R.; Azevedo, J.L.F. Turbulent kinetic energy budgets in wall bounded flows with pressure gradients and separation. Phys. Fluids 2017, 29, 115108. [Google Scholar] [CrossRef]
- Marler, R.; Arora, J. Survey of multi-objective optimization methods for engineering. Struct. Multidiscip. Optim. 2004, 26, 369–395. [Google Scholar] [CrossRef]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method. In Chapter 6: Solution Algorithms for Pressure-Velocity Coupling in Steady Flows; Pearson Education: Essex, UK, 2007. [Google Scholar]
- Walker, A.D.; Barker, A.G.; Carrotte, J.F. Numerical design and experimental evaluation of an aggressive s-shaped compressor transition duct with bleed. In Proceedings of the ASME 2011 Turbo Expo: Turbine Technical Conference and Exposition, Vancouver, BC, Canada, 6–10 June 2011; Volume 7. [Google Scholar]
- Walker, A.D.; Barker, A.G.; Mariah, I.; Peacock, G.L.; Carrotte, J.F.; Northall, R.M. An aggressive S-shaped compressor transition duct with swirling flow and aerodynamic lifting struts. In Proceedings of the ASME Turbo Expo 2014: Turbine Technical Conference and Exposition, Düsseldorf, Germany, 16–20 June 2014; Volume 2A. [Google Scholar]
- Ha, M.Y.; Pusan University, Busan, South Korea. Private Communication, 2014.
- Pedras, M.H.; de Lemos, M.J. On the definition of turbulence kinetic energy for flow in porous media. Int. Commun. Heat Mass Transf. 2000, 27, 211–220. [Google Scholar] [CrossRef]
- Pareto, V.; Schwier, A.S. Manuale di Economica Politica, Societa Editrice Libraria; Schwier, A.S., Page, A.N., Eds.; Schwier, A.S., Translator; A.M. Kelley: New York, NY, USA, 1906. [Google Scholar]
- Pham, D.; Karaboga, D. Intelligent Optimisation Techniques: Genetic Algorithms, Tabu Search, Simulated Annealing and Neural Networks; Springer Science & Business Media: London, UK, 2012. [Google Scholar]
- Kyprianidis, K.G. Future Aero Engine Designs: An Evolving Vision; IntechOpen: London, UK, 2011; pp. 2–24. [Google Scholar] [CrossRef] [Green Version]
- ESDU. Performance in Incompressible Flow of Plane-Walled Diffusers with Single Plane Expansion, Data Item 74015. 2007. Available online: https://global.ihs.com/doc_detail.cfm?&item_s_key=00475053&item_key_date=920930&input_doc_number=ESDU%2074015&input_doc_title= (accessed on 10 January 2022).




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Boundary Type | Sketch Reference | Entity Type | |
|---|---|---|---|---|
| Model 1 | Off-take ramp | no-slip wall | D’–D | cubic Bezier curve |
| Diffuser 1 | D–B | |||
| C–A | ||||
| By-pass duct off-take wall | E–G | polynomial | ||
| By-pass duct virtual 2D annulus | slip wall | F*–G* | line segment | |
| By-pass duct inlet | velocity profile | F–F* | ||
| Cooling duct exit | outflow | A*–B* | ||
| By-pass duct exit | G–G* | |||
| By-pass duct symmetry plane | symmetry | F–E | ||
| Target zone | flow interior | A–B | ||
| Model 2 | S-duct 1 | no-slip wall | 1–4 (A) | cubic Bezier curve |
| 1–4 (B) | ||||
| S-duct 2 | 1–4 (C) | |||
| 1–4 (D) | ||||
| Diffuser 2 | 0–1 (A) | line segment | ||
| 0–1 (D) | ||||
| Duct inlet | inlet profile | 0 (A–B) | ||
| Duct exit | outflow | 6 (A–D) | ||
| Target zone 1 | flow interior | 4 (A–B) | ||
| Target zone 2 | 4 (C–D) | |||
| HX 1 | Porous media | 4–5 (A–B) | rectangular block | |
| HX 2 | 4-5 (C–D) |
| System Component | Design Variable | DoE | MIN | MAX | Evaluation Method | ||
|---|---|---|---|---|---|---|---|
| Model 1 | Off-take | streamtube height | - | 0.12 h4 | fixed mass flow rate | ||
| length | ✓ | 3.62 h4 | 5.44 h4 | DoE 1 | |||
| angle | ✓ | 8° | 45° | ||||
| height | ✓ | 0.052 h4 | 0.155 h4 | ||||
| Diffuser 1 | inlet height | ||||||
| exit height | - | 0.21 h4 | engine constraint (strut) | ||||
| Model 2 | Diffuser 2 | inlet height | |||||
| exit height | - | 0.33 h4 | ESDU chart (diffuser) | ||||
| Manifold (double s-duct) | inlet height | ||||||
| exit heights | - | 2h4 | HX specification | ||||
| Bezier curve control points | ✓ | 50% | 95% | DoE 3 | |||
| ✓ | 50% | 95% | |||||
| ✓ | 50% | 95% | |||||
| - | 90% | Spanelis et al., 2017 | |||||
| ✓ | 70% | 95% | DoE 2 | ||||
| ✓ | 80% | 95% | |||||
| ✓ | 30% | 95% | |||||
| - | 90% | Spanelis et al., 2017 | |||||
| Design Objective | ID | ||
|---|---|---|---|
| delivery duct loss, λCCA1 | 1 | 0.0928 | 0.66 |
| non-uniformity, 1 − γ | 2 | 0.0193 | 0.07 |
| bypass duct loss, λBPD | 3 | 0.00333 | 0.0047 |
| Input: | |||||
|---|---|---|---|---|---|
| Optimised for: | (Design ID) | λCCA1 | 1 − γ | λBPD | |
| CCA loss, λCCA1 | a7b7c7 | 4% | 65% | 24% | |
| Non-uniformity, 1 − γ | a1b6c7 | 88% | 10% | 61% | |
| BPD loss, λBPD | a7b3c5 | 14% | 69% | 21% | |
| All three | a7b1c7 | 9% | 44% | 32% | |
| Design Objective | ID | |||
|---|---|---|---|---|
| DoE 2 | total pressure loss, λCCA2 | 1 | 0.383 | 0.5 |
| non-uniformity, 1 − γ | 2 | 0.046 | 0.2 | |
| kinetic energy ratio, k* | 3 | 0.036 | 0.1 | |
| DoE 3 | total pressure loss, λCCA2 | 1 | 0.387 | 0.5 |
| non-uniformity, 1 − γ | 2 | 0.061 | 0.2 | |
| kinetic energy ratio, k* | 3 | 0.030 | 0.1 |
| Weighting | Input: Level Nr | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| DoE 2 (s-duct 2) | DoE 3 (s-duct 1) | ||||||||||
| Optimised for: | w1 | w2 | w3 | ||||||||
| single objective | λCCA2 | 1 | 0 | 0 | 1 | 1 | 4 | 5 | 5 | 6 | |
| 1 − γ | 0 | 1 | 0 | 7 | 5 | 6 | 6 | 7 | 6 | ||
| k* | 0 | 0 | 1 | 4 | 7 | 1 | 5 | 7 | 1 | ||
| multi objective | λCCA2 Vs 1 − γ | 1 | 1 | 0 | 6 | 1 | 6 | 5 | 7 | 6 | |
| λCCA2 Vs k* | 1 | 0 | 1 | 4 | 7 | 1 | 4 | 7 | 4 | ||
| 1 − γ Vs k* | 0 | 1 | 1 | 7 | 5 | 4 | 5 | 7 | 1 | ||
| all three | 1 | 1 | 1 | 4 | 7 | 3 | 5 | 7 | 5 | ||
| DoE 2 (s-duct 2) | DoE 3 (s-duct 1) | |||||||
|---|---|---|---|---|---|---|---|---|
| Optimised for: ↓ | ||||||||
| single objective | λCCA2 | 13% | 25% | 52% | 16% | 64% | 40% | |
| 1 − γ | 21% | 11% | 44% | 38% | 11% | 19% | ||
| k* | 21% | 46% | 12% | 132% | 11% | 7% | ||
| multi objective | λCCA2 vs 1 − γ | 16% | 13% | 50% | 25% | 13% | 21% | |
| λCCA2 vs k* | 21% | 46% | 12% | 22% | 18% | 20% | ||
| 1 − γ vs k* | 21% | 12% | 34% | 132% | 11% | 7% | ||
| all three | 17% | 26% | 22% | 27% | 13% | 18% | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spanelis, A.; Walker, A.D. A Multi-Objective Factorial Design Methodology for Aerodynamic Off-Takes and Ducts. Aerospace 2022, 9, 130. https://doi.org/10.3390/aerospace9030130
Spanelis A, Walker AD. A Multi-Objective Factorial Design Methodology for Aerodynamic Off-Takes and Ducts. Aerospace. 2022; 9(3):130. https://doi.org/10.3390/aerospace9030130
Chicago/Turabian StyleSpanelis, Apostolos, and Alastair Duncan Walker. 2022. "A Multi-Objective Factorial Design Methodology for Aerodynamic Off-Takes and Ducts" Aerospace 9, no. 3: 130. https://doi.org/10.3390/aerospace9030130
APA StyleSpanelis, A., & Walker, A. D. (2022). A Multi-Objective Factorial Design Methodology for Aerodynamic Off-Takes and Ducts. Aerospace, 9(3), 130. https://doi.org/10.3390/aerospace9030130