
Design and Performance of X-Band SAR Payload for 80 kg Class Flat-Panel-Type Microsatellite Based on Active Phased Array Antenna



Abstract
:1. Introduction
2. Mission and Satellite Design
2.1. Overview
2.2. Mission and Satellite
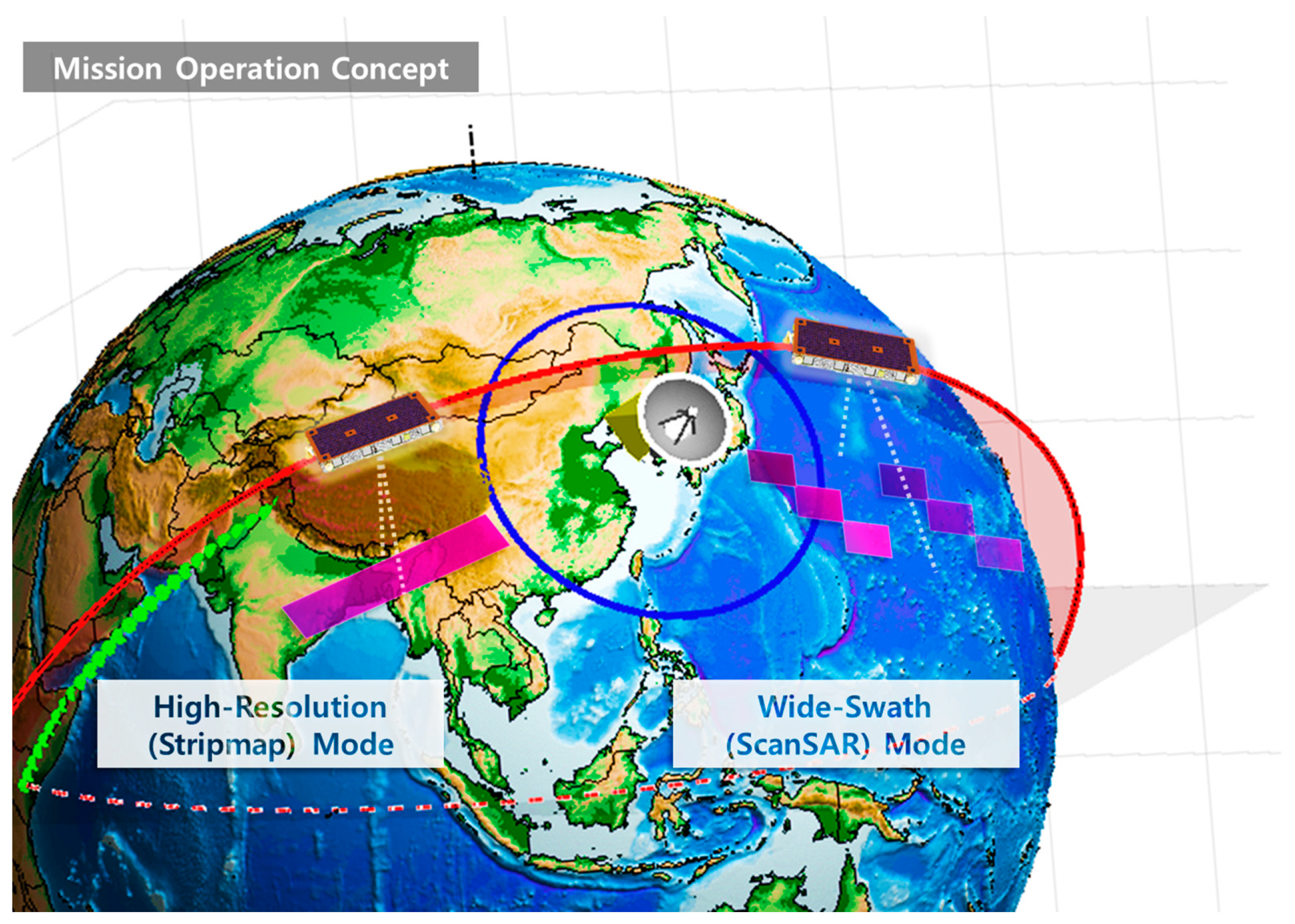
2.3. Imaging Modes
2.3.1. High-Resolution Mode
2.3.2. Wide-Swath Mode
3. SAR Payload Design
3.1. System Parameter Design
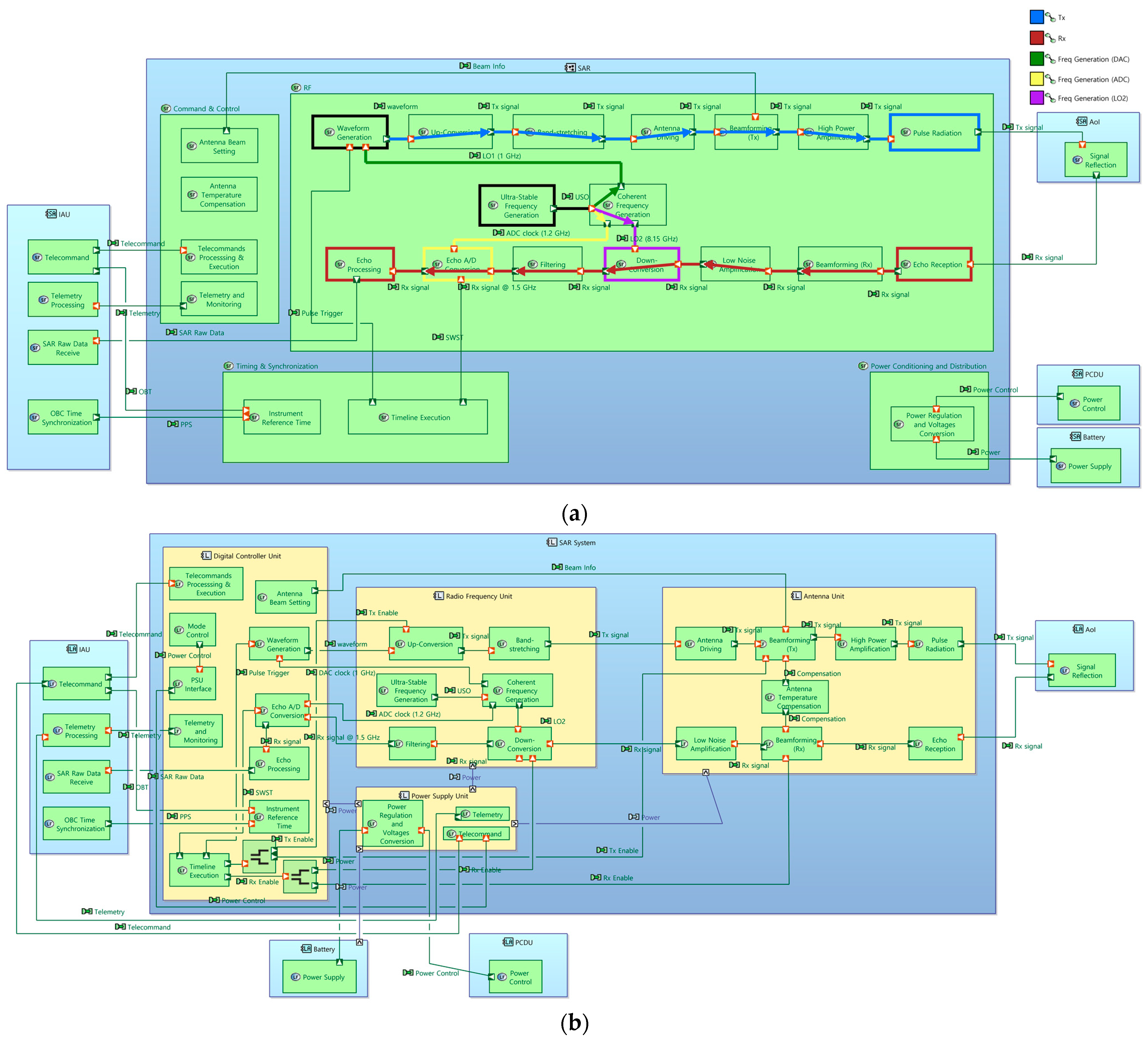
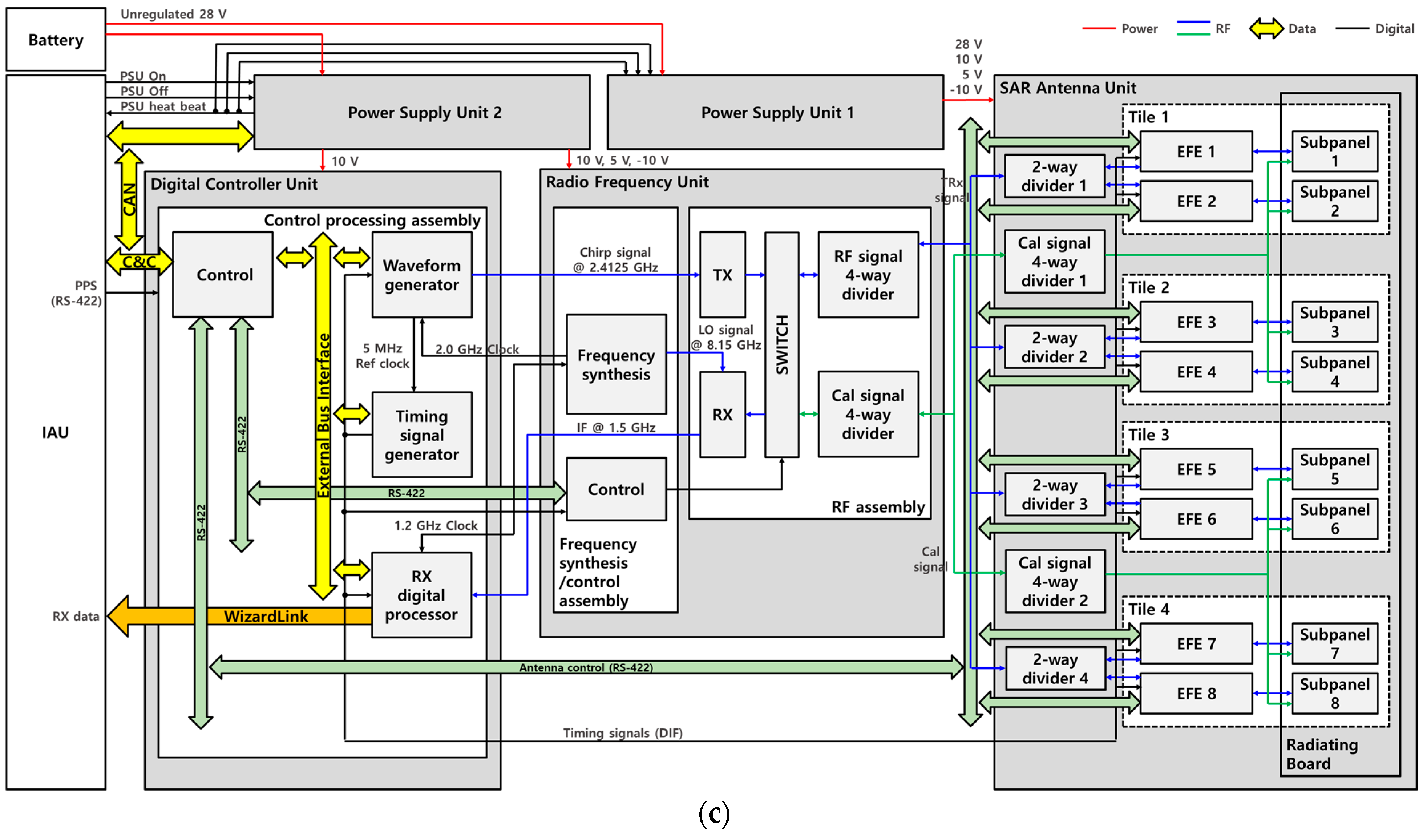
3.2. System Architecture Design
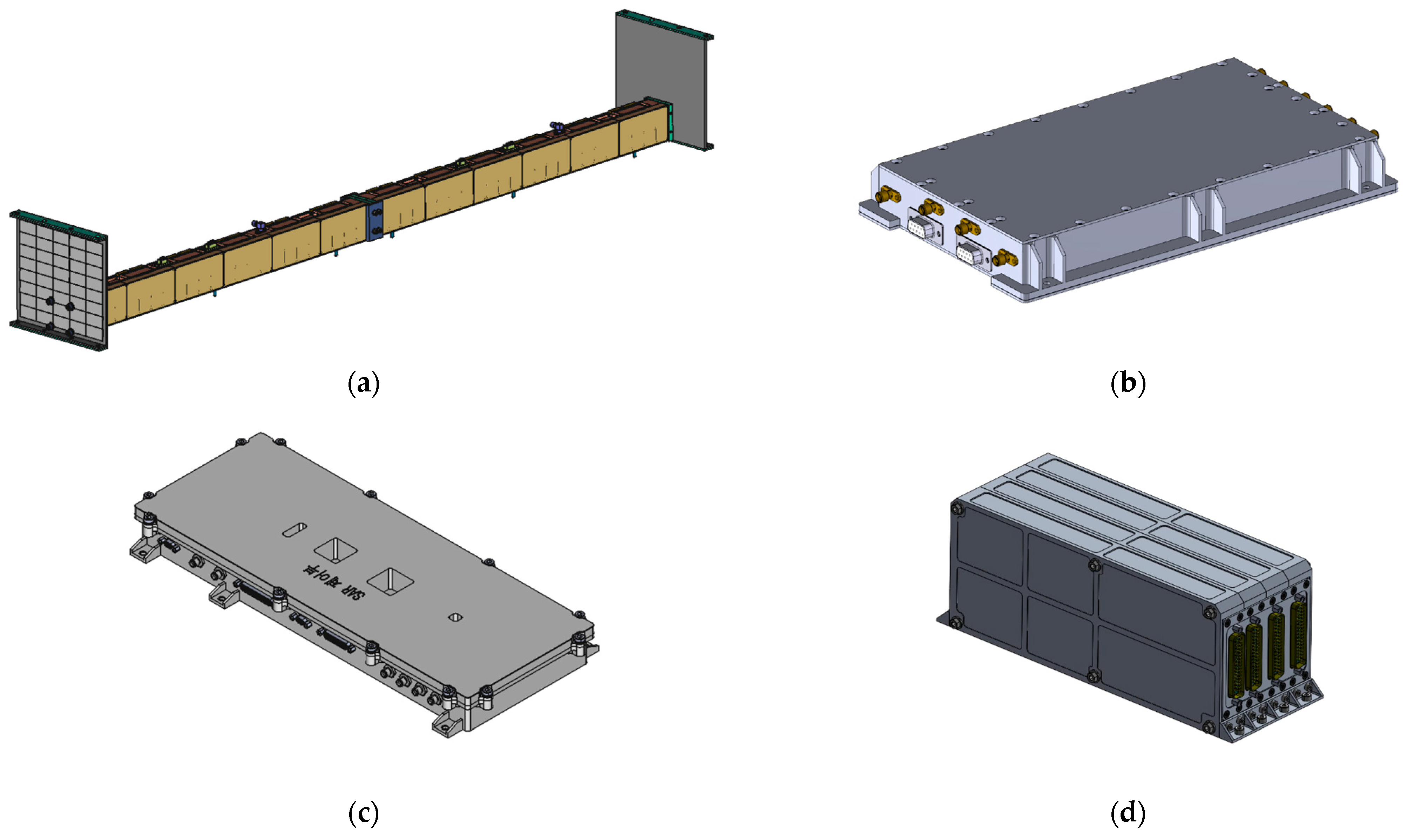
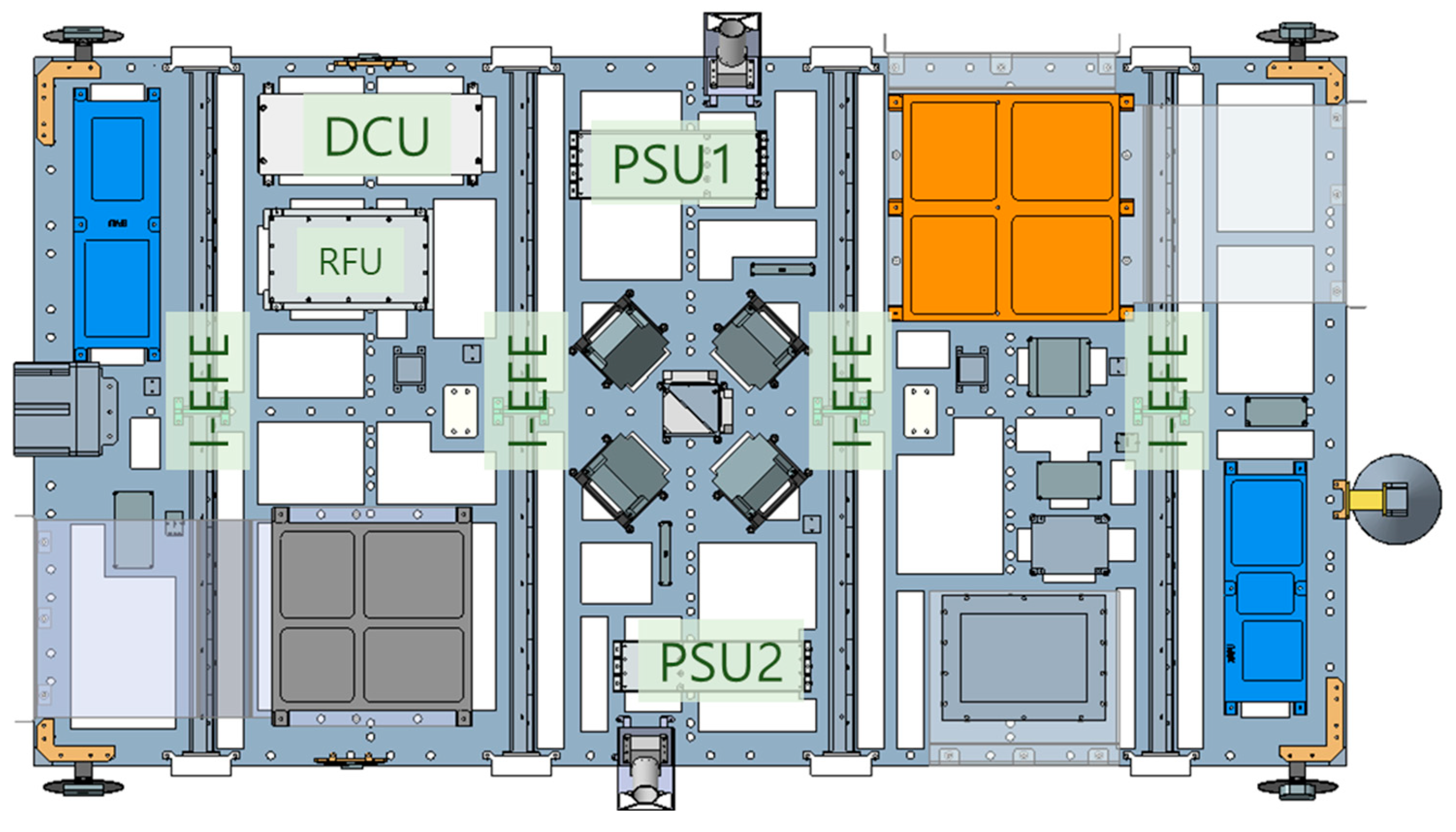
4. SAR Payload Unit Design
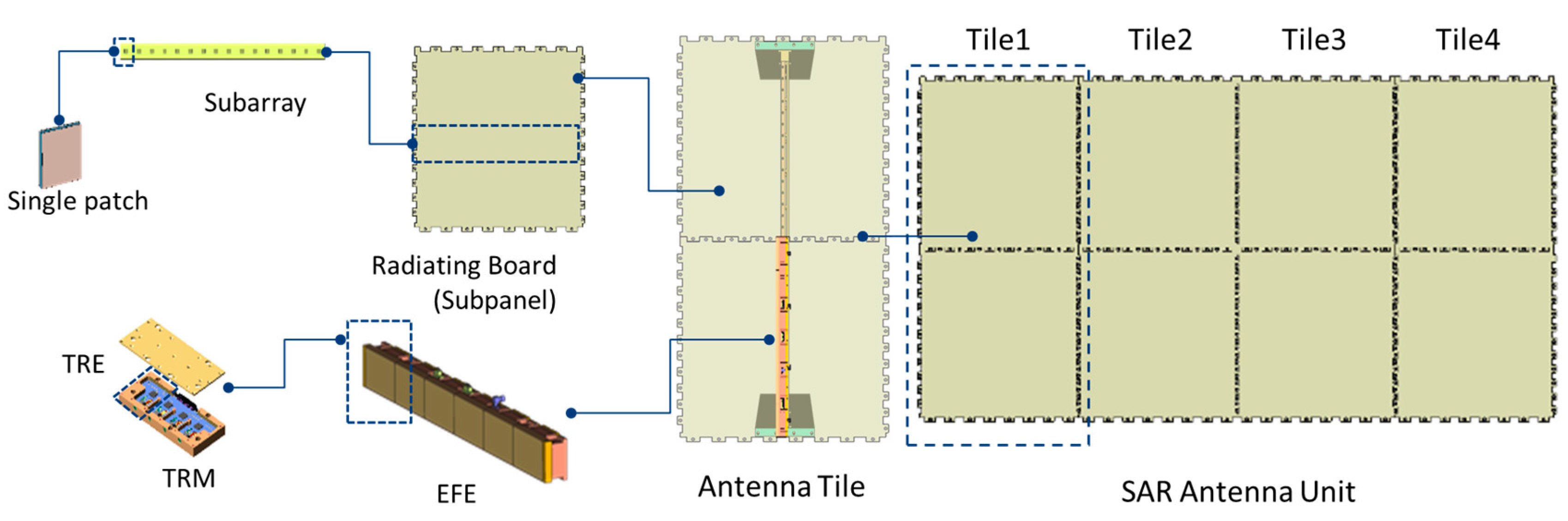
4.1. SAR Antenna Unit
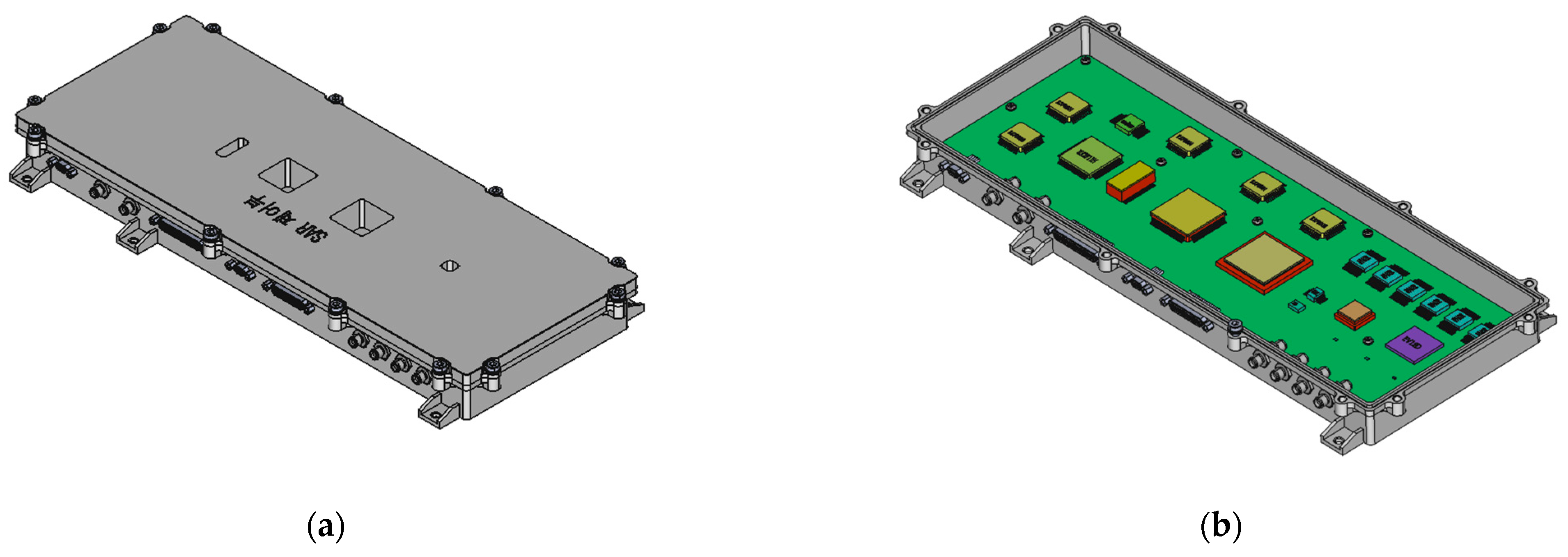
4.2. Radio Frequency Unit
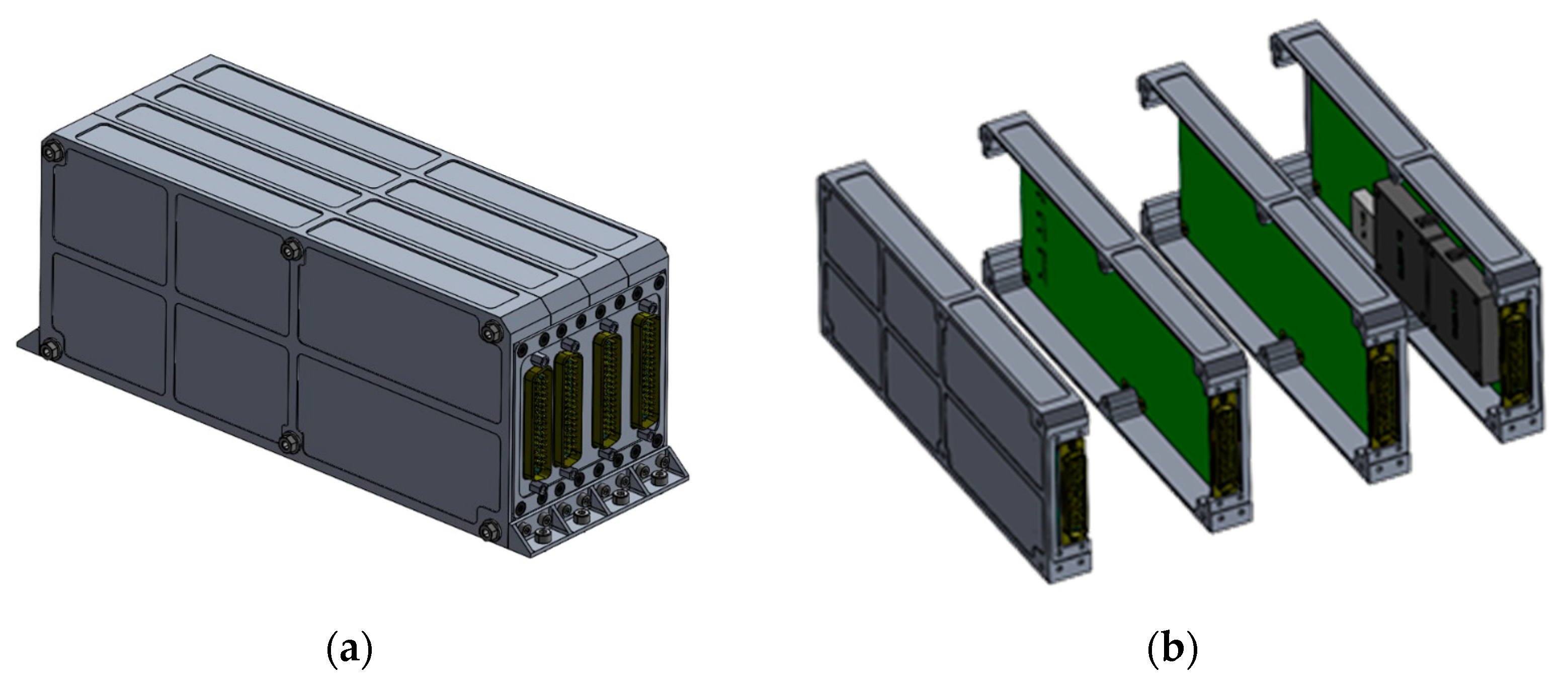
4.3. Digital Control Unit
4.4. Power Supply Unit
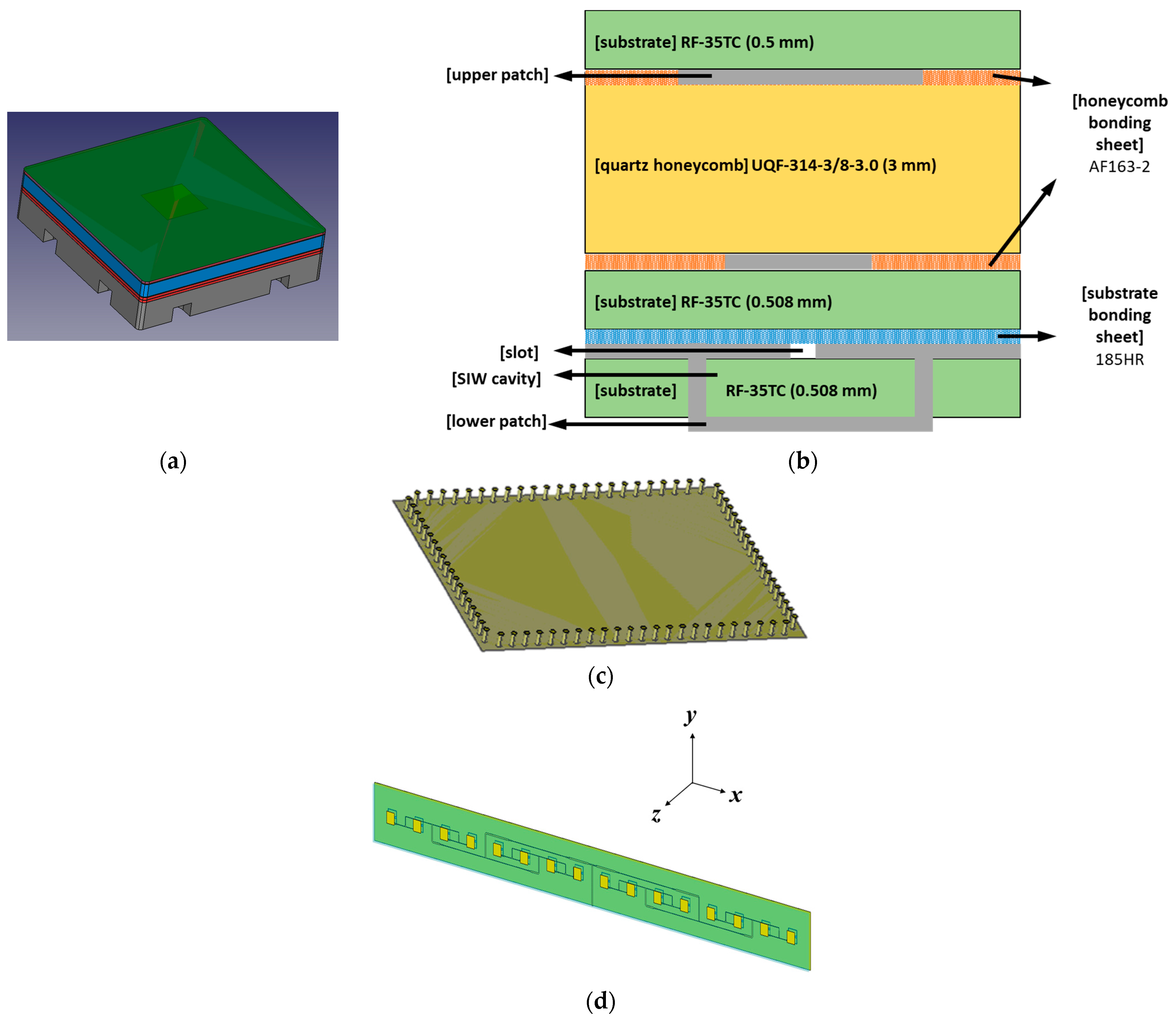
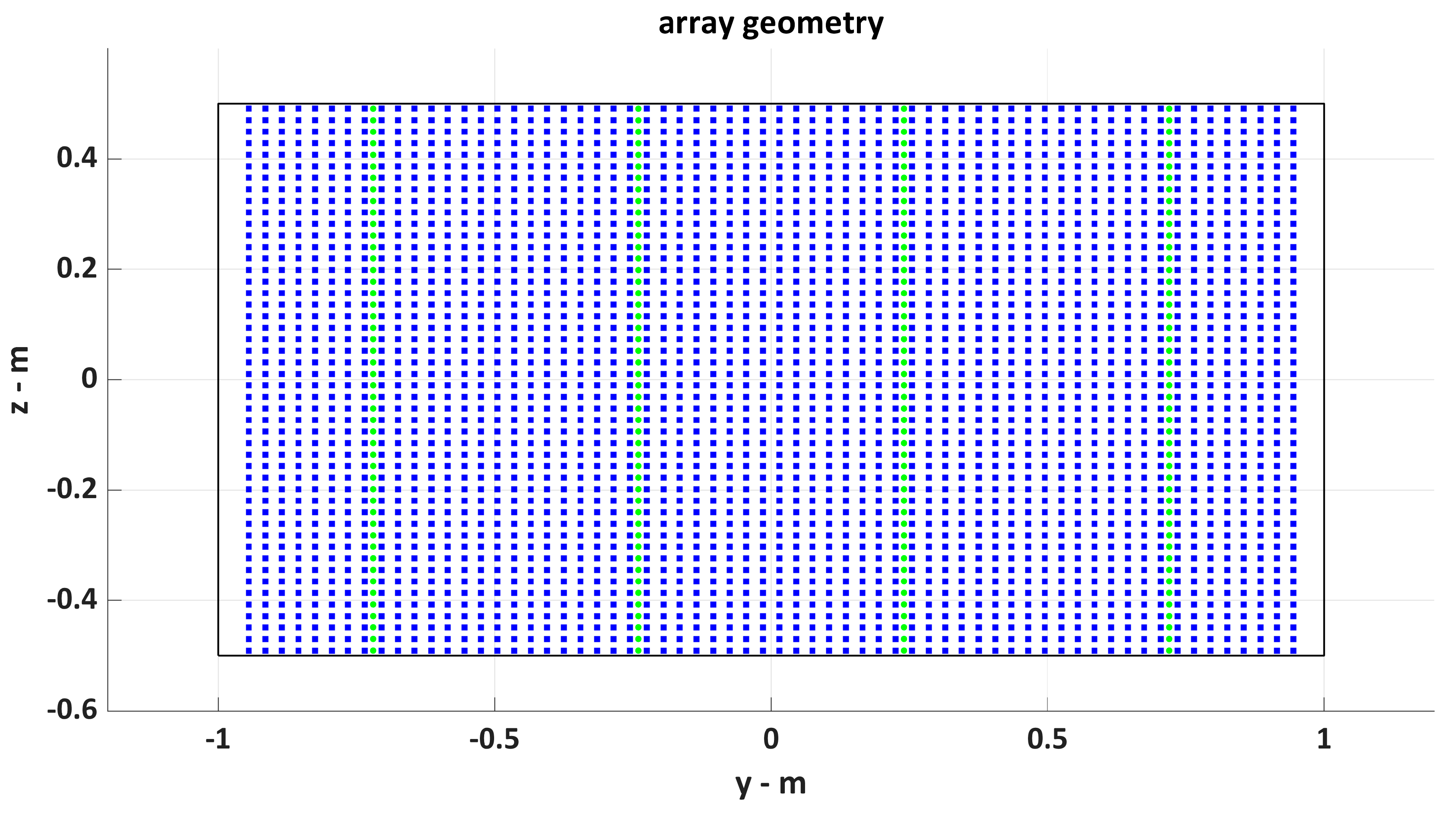
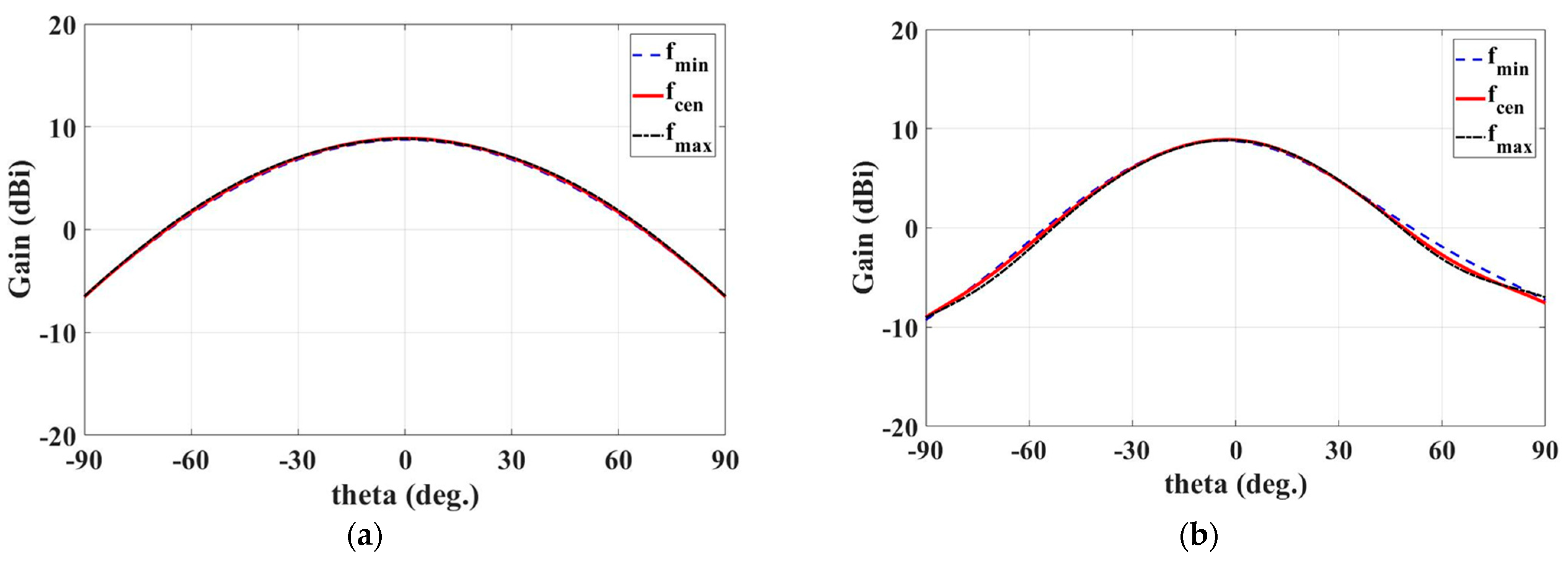
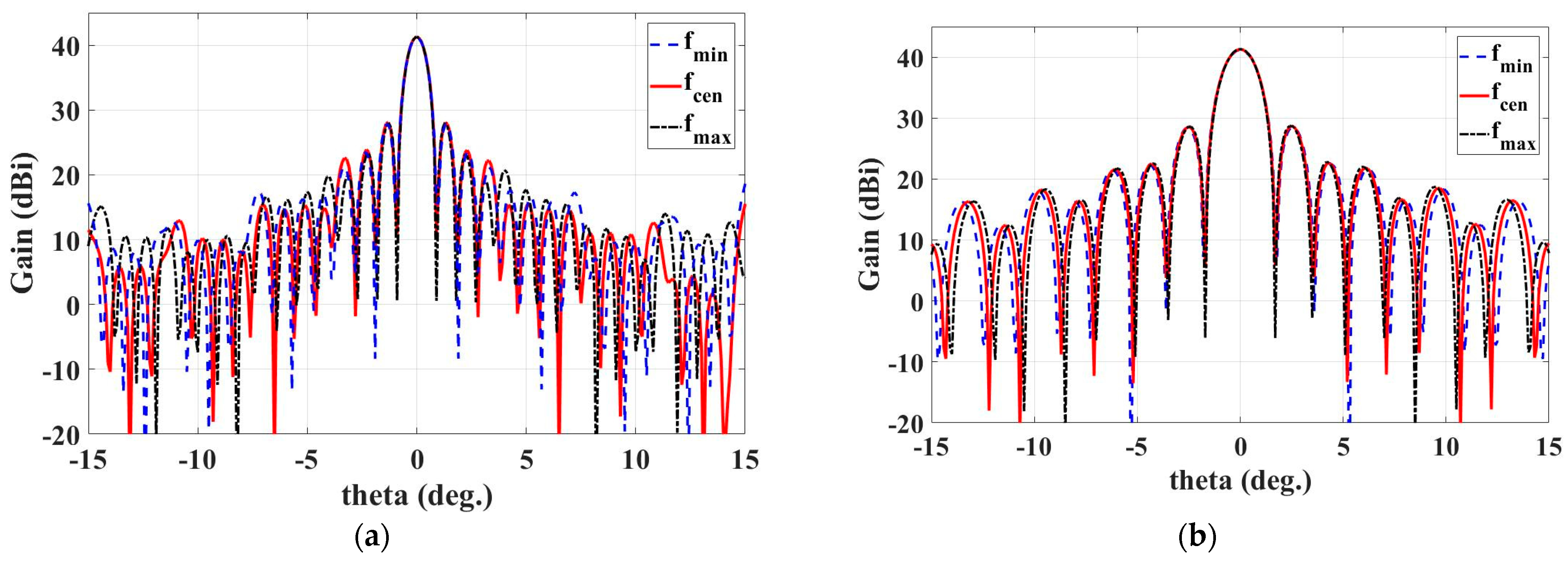
5. Antenna Model
6. SAR Payload Performance Analysis
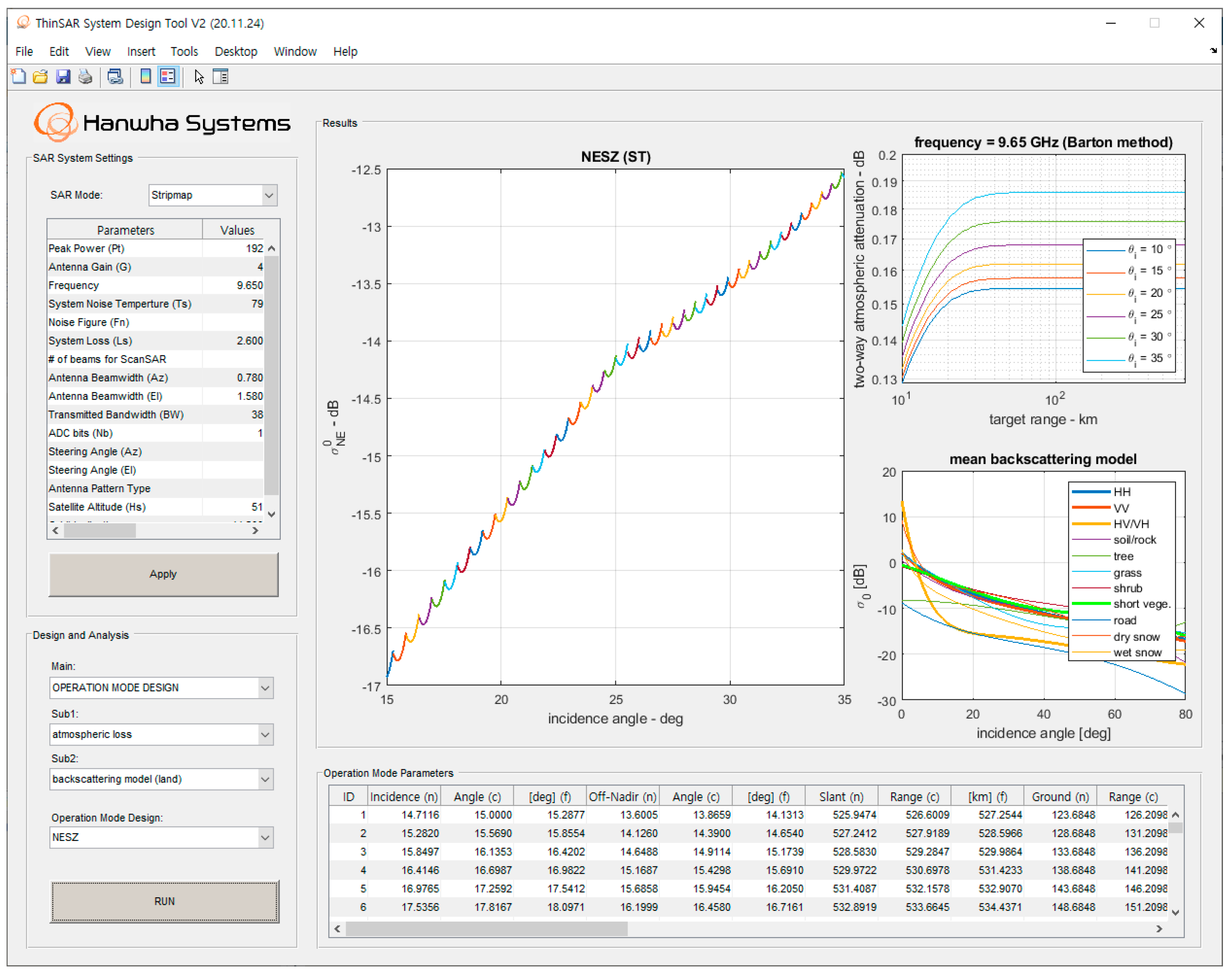
6.1. SAR Payload System Design Tool
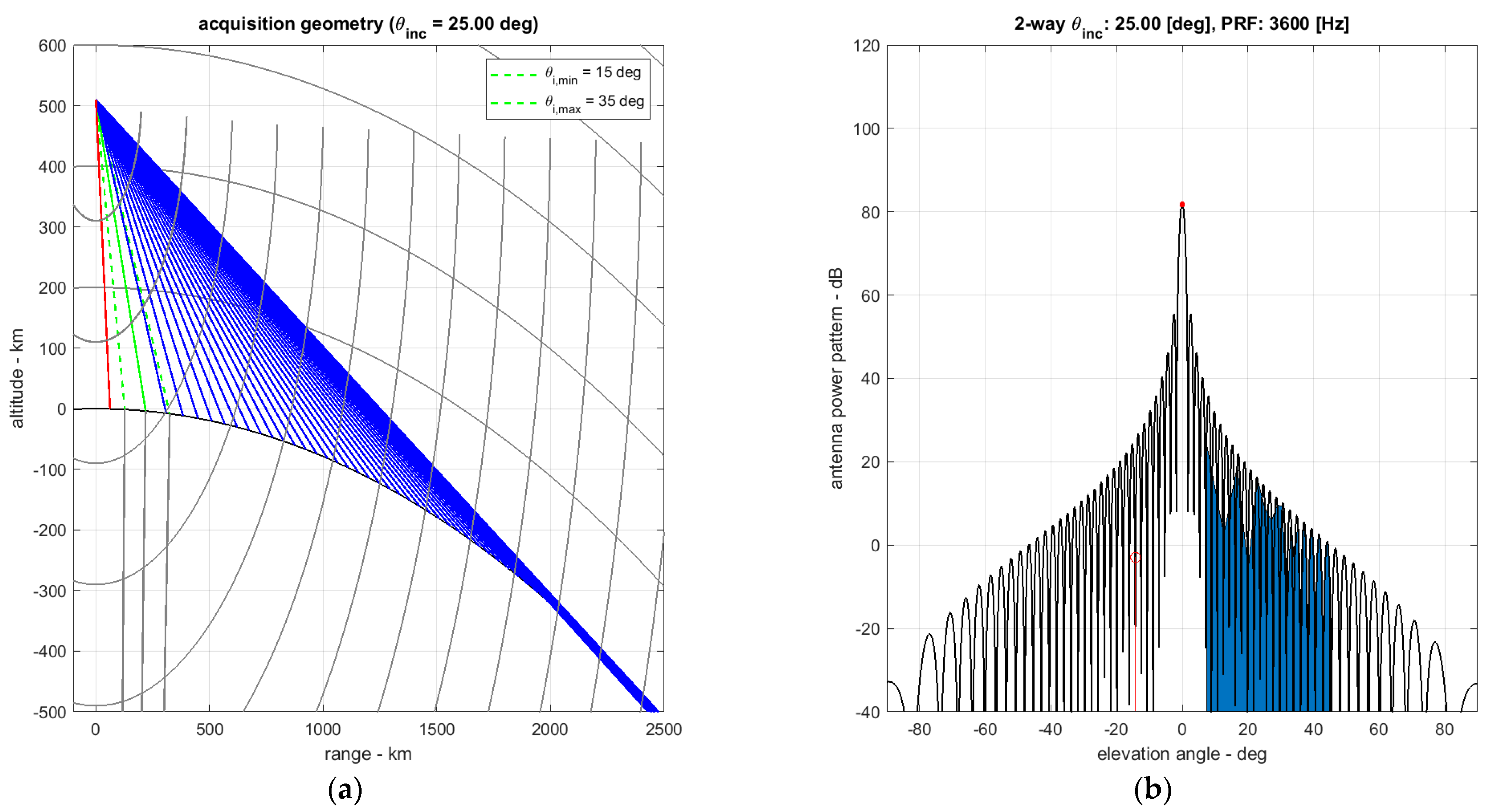
6.2. PRF Diamond Diagram
6.3. Noise Equivalent Sigma Zero
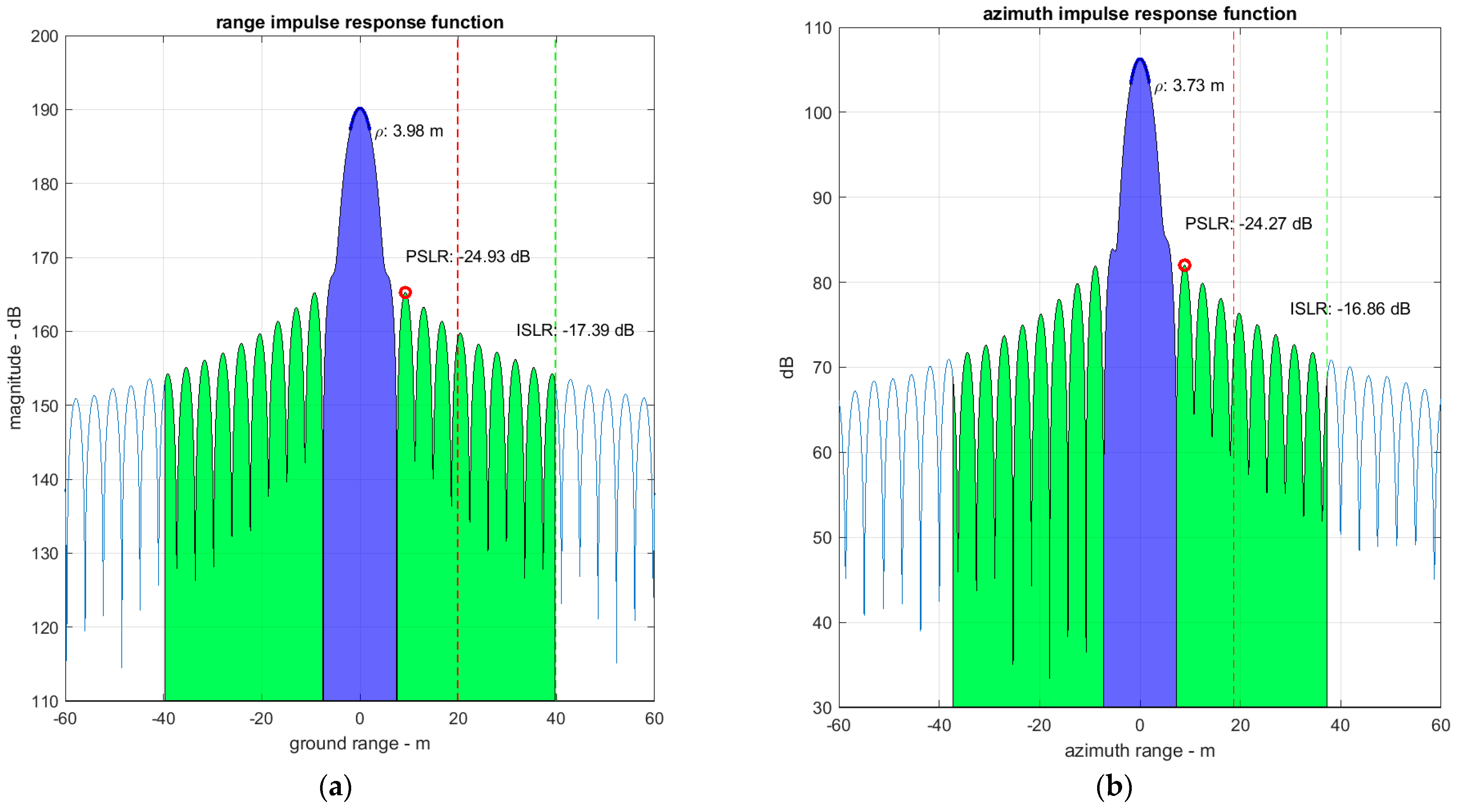
6.4. Impulse Response Function
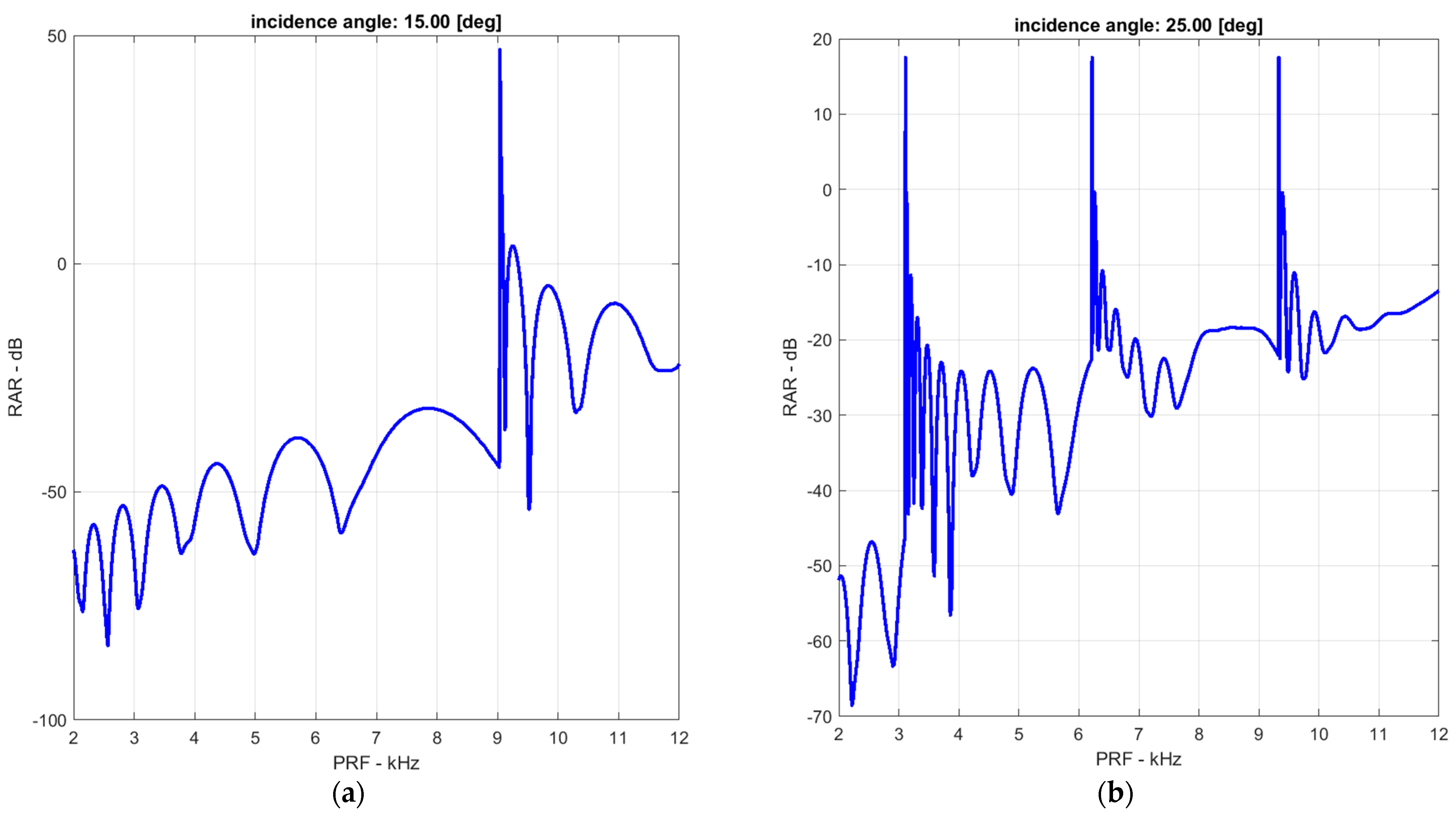
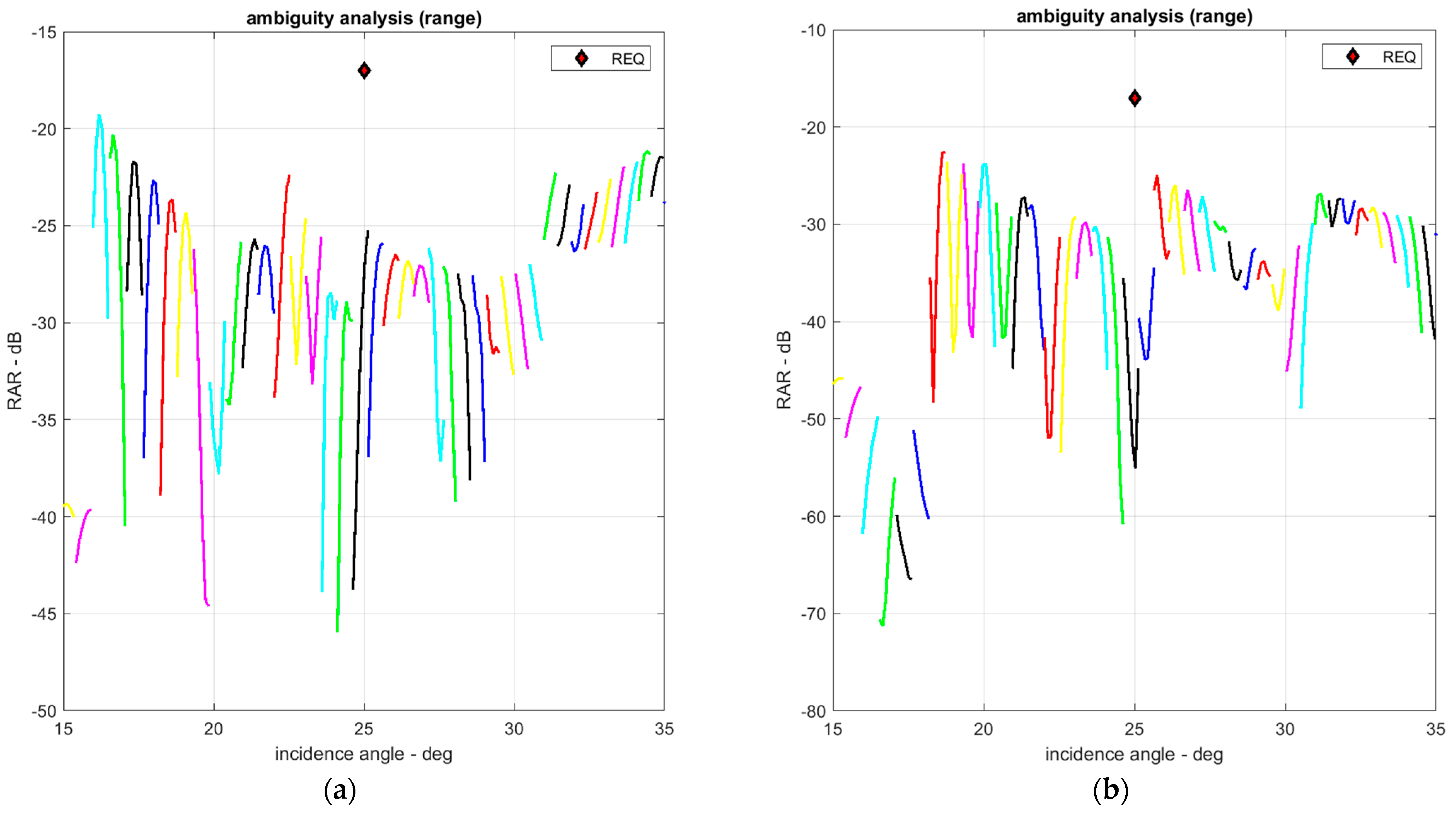
6.5. Range Ambiguity Ratio
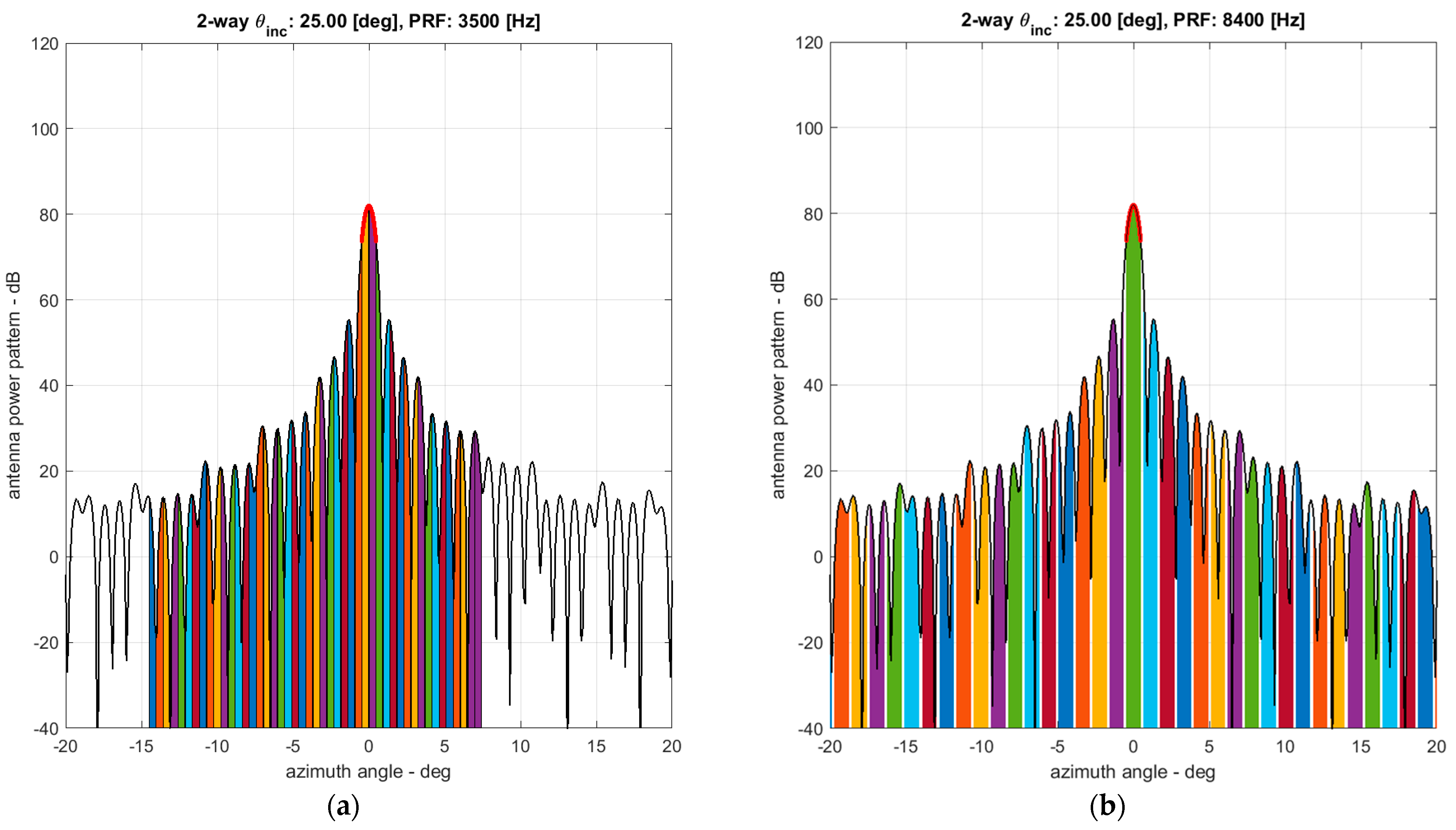
6.6. Azimuth Ambiguity Ratio
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar: Systems and Signal Processing; John Wiley & Sons: New York, NY, USA, 1991. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Boston, MA, USA, 2005. [Google Scholar]
- Richards, M. Principles of Modern Radar; SciTech Publishing: Raleigh, NC, USA, 2010; Volume 1. [Google Scholar]
- Kim, H.; Park, J.; Chang, Y.-K.; Lee, S.-H. Optimal Attitude Maneuvering Analyses for Imaging at Squint Staring and Sliding Spotlight Modes of SAR Satellite. Aerospace 2021, 8, 277. [Google Scholar] [CrossRef]
- Kim, H.; Chang, Y.-K. Optimal mission scheduling for hybrid synthetic aperture radar satellite constellation based on weighting factors. Aerosp. Sci. Technol. 2020, 107, 106287. [Google Scholar] [CrossRef]
- Kim, J.; Kim, W.; Park, K.; Song, B.D. Optimal Use of ISR Assets for Detecting Time-Sensitive Targets Incorporating Satellites in Missile Defense Oper-ations. Mil. Op. Res. 2020, 25, 23–34. [Google Scholar]
- Brehmer, B. The Dynamic OODA Loop: Amalgamating Boyd’s OODA Loop and the Cybernetic Approach to Command and Control. In Proceedings of the 10th ICCRTS, McLean, VA, USA, 13–16 June 2005. [Google Scholar]
- Howard, E.M. Faster, Better, Cheaper: Low-Cost Innovation in the U.S. Space Program; The Johns Hopkins University Press: Baltimore, MD, USA, 2003. [Google Scholar]
- Sweeting, M.N. Modern Small Satellites-Changing the Economics of Space. Proc. IEEE 2018, 106, 343–361. [Google Scholar] [CrossRef]
- Pitz, W. The TerraSAR-X Satellite. In Proceedings of the EUSAR 2006, Dresden, Germany, 16–18 May 2006. [Google Scholar]
- Grafmuller, B.; Herschlein, A.; Fischer, C. The TerraSAR-X Antenna System. In Proceedings of the 2005 International Radar Conference, Arlington, VA, USA, 9–12 May 2005. [Google Scholar]
- Lee, S.-G.; Lee, S.-J.; Kim, H.; Chea, T.-B.; Ryu, D. Status of the KOMPSAT-5 SAR Mission, Utilization and Future Plans. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3552–3555. [Google Scholar]
- Paek, S.W.; Balasubramanian, S.; Kim, S.; De Weck, O. Small-Satellite Synthetic Aperture Radar for Continuous Global Biospheric Monitoring: A Review. Remote Sens. 2020, 12, 2546. [Google Scholar] [CrossRef]
- Ignatenko, V.; Laurila, P.; Radius, A.; Lamentowski, L.; Antropov, O.; Muff, D. ICEYE Microsatellite SAR Constellation Status Update: Evaluation of First Commercial Imaging Modes. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3581–3584. [Google Scholar]
- Korczyk, J. Reliable on Board Data Processing System for the ICEYE-1 Satellite; KTH Royal Institute of Technology: Stockholm, Sweden, 2016. [Google Scholar]
- Castelletti, D.; Farquharson, G.; Stringham, C.; Duersch, M.; Eddy, D. Capella Space First Operational SAR Satellite. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 1483–1486. [Google Scholar]
- Castelletti, D.; Farquharson, G.; Stringham, C.; Eddy, D. Operational Readiness of the Capella Space SAR System. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3571–3573. [Google Scholar]
- Stringham, C.; Farquharson, G.; Castelletti, D.; Quist, E.; Riggi, L.; Eddy, D.; Soenen, S. The Capella X-band SAR Constellation for Rapid Imaging. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 9248–9251. [Google Scholar]
- Farquharson, G.; Woods, W.; Stringham, C.; Sankarambadi, N.; Riggi, L. The Capella Synthetic Aperture Radar Constellation. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 1873–1876. [Google Scholar]
- Thomson, M.W. The AstroMesh Deployable Reflector. In IUTAM-IASS Symposium on Deployable Structures: Theory and Applications; Springer: Dordrecht, The Netherlands, 2000. [Google Scholar]
- Angevain, J.C.; Ihle, A.; Rodrigues, G.; Santiago-Prowald, J. Large Deployable Spaceborne Reflector Antennas in Europe: Progress Status and Perspectives. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March–5 April 2019. [Google Scholar]
- Pyne, B.; Saito, H.; Akbar, P.R.; Hirokawa, J.; Tomura, T.; Tanaka, K. Development and Performance Evaluation of Small SAR System for 100-kg Class Satellite. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3879–3891. [Google Scholar] [CrossRef]
- Faizullin, D. Attitude Determination and Control System for the First SAR Satellite in a Constellation of iQPS. In Proceedings of the 71st International Astronautical Congress (IAC), Dubai, United Arab Emirates, 12–14 October 2020. [Google Scholar]
- Kwon, S.-C.; Son, J.-H.; Song, S.-C.; Park, J.-H.; Koo, K.-R.; Oh, H.-U. Innovative Mechanical Design Strategy for Actualizing 80 kg-Class X-Band Active SAR Small Satellite of S-STEP. Aerospace 2021, 8, 149. [Google Scholar] [CrossRef]
- Park, T.-Y.; Chae, B.-G.; Kim, H.; Koo, K.-R.; Song, S.-C.; Oh, H.-U. New Thermal Design Strategy to Achieve an 80-kg-Class Lightweight X-Band Active SAR Small Satellite S-STEP. Aerospace 2021, 8, 278. [Google Scholar] [CrossRef]
- Son, J.H.; Park, J.H.; Kim, S.; Lee, H.J.; Song, S.C.; Koo, K.R.; Kim, H.R.; Oh, H.U. Mission and System Design for 80kg-class X-band Active SAR Satellite of S-STEP. In Proceedings of the 72nd International Astronautical Congress (IAC), Dubai, United Arab Emirates, 21–29 October 2021. [Google Scholar]
- Filippazzo, G.; Dinand, S. The Potential Impact of Small Satellite Radar Constellations on Traditional Space Systems. In Proceedings of the 5th Federated and Fractionated Satellite Systems Workshop, Toulouse, France, 2–3 November 2017. [Google Scholar]
- Lu, J.; Mittra, R. Design Technology of Synthetic Aperture Radar. IEEE Antennas Propag. Mag. 2020, 62, 124–125. [Google Scholar] [CrossRef]
- L’Abbate, M.; Germani, C.; Torre, A.; Campolo, G.; Cascone, D.; Bombaci, O.; Soccorsi, M.; Iorio, M.; Varchetta, S.; Federici, S. Compact SAR and Micro Satellite Solutions for Earth Observation. In Proceedings of the 31st Space Symposium, Springs, CO, USA, 13–16 April 2015. [Google Scholar]
- Friedenthal, S.; Griego, R.; Sampson, M. INCOSE Model Based Systems Engineering (MBSE) Initiative. In Proceedings of the INCOSE 2007 Symposium, San Diego, CA, USA, 24–28 June 2007; Volume 11. [Google Scholar]
- Voirin, J.-L. Model-Based System and Architecture Engineering with the Arcadia Method; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Roques, P. Systems Architecture Modeling with the Arcadia Method: A Practical Guide to Capella; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Chahat, N. CubeSat Antenna Design; John Wiley & Sons: New York, NY, USA, 2021. [Google Scholar]
- Capece, P.; Torre, A. Space Antenna Handbook; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Rosenberg, L.; Gray, D. Anti-jamming techniques for multichannel SAR imaging. IEE Proc. Radar Sonar Navig. 2006, 153, 234–242. [Google Scholar] [CrossRef] [Green Version]
- Agrawal, A.; Richard, C.; James, K. T/R Module Architecture Tradeoffs for Phased Array Antennas. In Proceedings of the 1996 IEEE MTT-S International Microwave Symposium Digest, San Francisco, CA, USA, 17–21 June 1996; Volume 2. [Google Scholar]
- Fina, A.; Carlofelice, A.D.; Paulis, F.D. High Power, Thermally Efficient, X-band 3D T/R Module with Calibration Capability for Space Radar. IEEE Access. 2018, 6, 60921–60929. [Google Scholar]
- Brandfass, M.; Boeck, M.; Bil, R. Multifunctional AESA Technology Trends—A Radar System Aspects View. In Proceedings of the 2019 IEEE International Symposium on Phased Array System & Technology (PAST), Yokohama, Japan, 28 July–2 August 2019; pp. 8138–8143. [Google Scholar]
- Sturdivant, R.; Harris, M. Transmit Receive Modules for Radar and Communication Systems; Artech House: Norwood, MA, USA, 2015. [Google Scholar]
- Alvarez-Perez, J.L.; Schwerdt, M.; Bachmann, M. TerraSAR-X Antenna Pattern Estimation by Complex Treatment of Rain Forest Measurements. In Proceedings of the Geoscience and Remote Sensing Symposium, IGARSS 2006, Denver, CO, USA, 31 July–4 August 2006. [Google Scholar]
- Bachmann, M.; Schwerdt, M.; Brautigam, B.; Grafmuller, B.; Herschlein, A.; Alvarez-Perez, J.L. The TerraSAR-X Antenna Model Approach. In Proceedings of the 2nd International ITG Conference on Antennas (INICA’07), Munich, Germany, 28–30 March 2007; pp. 139–142. [Google Scholar]
- Bachmann, M.; Schwerdt, M.; Bräutigam, B. Accurate Antenna Pattern Modeling for Phased Array Antennas in SAR Appli-cations—Demonstration on TerraSAR-X. Int. J. Antennas Propag. 2009, 1, 1–9. [Google Scholar]
- Sun, J.; Yu, W.; Deng, Y. The SAR Payload Design and Performance for the GF-3 Mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Won, Y.-J.; Lee, K.H.; Lee, J.-H. Performance Improvement of Spaceborne SAR Using Antenna Pattern Synthesis Based on Quantum-Behaved Particle Swarm Optimization. Int. J. Antennas Propag. 2017. [Google Scholar] [CrossRef] [Green Version]
- Ulaby, F.; Dobson, C.M.; Álvarez-Pérez, J.L. Handbook of Radar Scattering Statistics for Terrain; Artech House: Norwood, MA, USA, 2019. [Google Scholar]
- Pillai, U.; Ke Yong, L.; Braham, H. Space Based Radar: Theory and Applications; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Mission lifetime | 3 years |
| Total spacecraft mass | 80.3 kg excluding launch adapter |
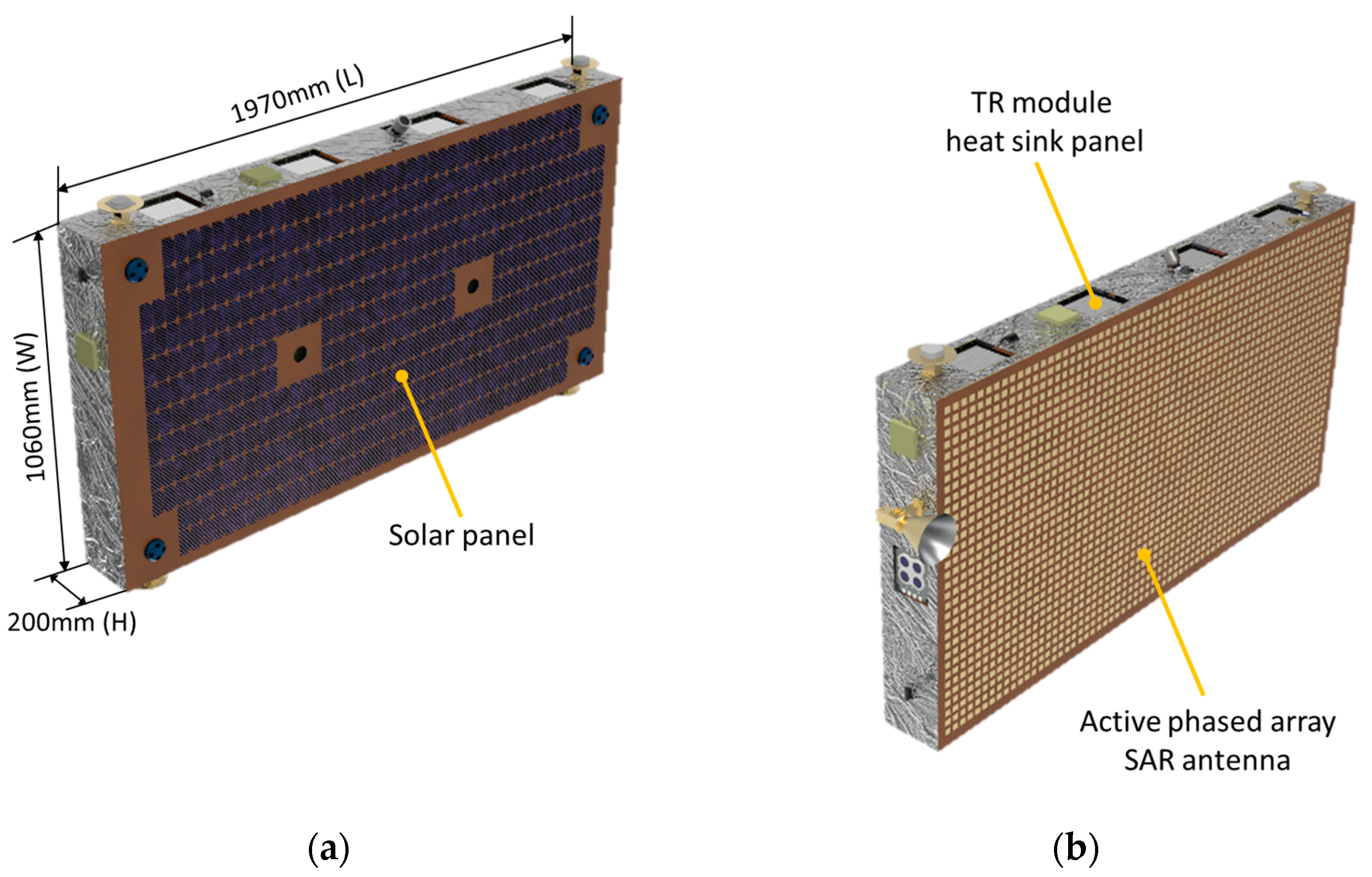
| Satellite size | 1970 × 1060 × 200 mm |
| Power | Generation: 340 W (BoL) Storage: 648 Wh |
| Inter-satellite link | RF (S-band, 20 kbps) |
| Telemetry telecommand (TMTC) | S-band (Up: 32 kbps; Down: 1 Mbps) |
| Datalink | X-band (1 Gbps) |
| Stabilization method | 3-axis stabilized |
| Pointing accuracy | ) |
| Image acquisition time | 60 s max |
| Parameters | High-Resolution Mode | Wide-Swath Mode |
|---|---|---|
| Access region | 15°~35° | 15°~35° |
| Swath width | ≥5 km | ≥15 km |
| Resolution | ≤1 m @ 25° | ≤4 m @ 25° |
| NESZ | ≤−14 dB @ 25° | ≤−16 dB @ 25° |
| Peak sidelobe ratio | ≤−17 dB | ≤−17 dB |
| Integrated sidelobe ratio | ≤−12 dB | ≤−12 dB |
| Range ambiguity ratio | ≤−17 dB | ≤−17 dB |
| Azimuth ambiguity ratio | ≤−17 dB | ≤−17 dB |
| Parameters | Value |
|---|---|
| Center frequency | 9.65 GHz |
| Polarization | single (VV) |
| Antenna size | 1970 × 1060 mm |
| Number of panels | 1 |
| Array columns (azimuth) | 4 |
| Array rows (elevation) | 48 |
| Antenna gain | 41 dBi |
| Antenna beamwidth | 0.8° in azimuth 1.6° in elevation |
| Transmitted power | 1.92 kW max |
| Average power consumption | 2.8 kW max |
| Transmitted bandwidth | 400 MHz max |
| Pulse width | 150 μs max |
| Transmit duty cycle | 30% max |
| Noise figure | 4 dB |
| Pulse repetition frequency | 2~10 kHz |
| Quantization | 10 bits |
| Date rate | 1.5 Gbps |
| System loss | 2.6 dB |
| Payload mass | 28.9 kg max |
| Parameters | Incidence Angle | ||
|---|---|---|---|
| 15° | 25° | 35° | |
| Beam steering angle | −8.02° | 1.41° | 10.29° |
| Pulse width | 41 μs | 41 μs | 41 μs |
| Transmitted bandwidth | 380 MHz | 376.27 MHz | 278.22 MHz |
| Sampling frequency | 456 MHz | 451.52 MHz | 333.86 MHz |
| PRF | 7220.39 Hz | 7105.39 Hz | 7197.39 Hz |
| Sampling window length | 49.72 μs | 55.38 μs | 60.37 μs |
| Rank | 25 | 26 | 29 |
| Sampling window start time | 46.33 μs | 65.64 μs | 46.39 μs |
| Synthetic aperture time | 0.99 s | 1.05 s | 1.15 s |
| Number of pulses acquired | 7116 | 7439 | 8249 |
| Parameters | Incidence Angle | ||
|---|---|---|---|
| 15° | 25° | 35° | |
| Beam steering angle | −8.02° | 1.41° | 10.29° |
| Pulse width | 32 μs | 32 μs | 32 μs |
| Transmitted bandwidth | 156.65 MHz | 94.07 MHz | 69.55 MHz |
| Sampling frequency | 187.98 MHz | 112.88 MHz | 83.47 MHz |
| PRF | 4033 Hz | 4068 Hz | 4000 Hz |
| Sampling window length | 40.72 μs | 46.38 μs | 51.37 μs |
| Rank | 14 | 15 | 16 |
| Sampling window start time | 37.38 μs | 37.52 μs | 75.63 μs |
| Synthetic aperture time | 0.25 s | 0.26 s | 0.29 s |
| Number of pulses acquired | 994 | 1065 | 1146 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Song, C.-M.; Lee, S.-H.; Song, S.-C.; Oh, H.-U. Design and Performance of X-Band SAR Payload for 80 kg Class Flat-Panel-Type Microsatellite Based on Active Phased Array Antenna. Aerospace 2022, 9, 213. https://doi.org/10.3390/aerospace9040213
Kim S, Song C-M, Lee S-H, Song S-C, Oh H-U. Design and Performance of X-Band SAR Payload for 80 kg Class Flat-Panel-Type Microsatellite Based on Active Phased Array Antenna. Aerospace. 2022; 9(4):213. https://doi.org/10.3390/aerospace9040213
Chicago/Turabian StyleKim, Seok, Chan-Mi Song, Seung-Hun Lee, Sung-Chan Song, and Hyun-Ung Oh. 2022. "Design and Performance of X-Band SAR Payload for 80 kg Class Flat-Panel-Type Microsatellite Based on Active Phased Array Antenna" Aerospace 9, no. 4: 213. https://doi.org/10.3390/aerospace9040213
APA StyleKim, S., Song, C. -M., Lee, S. -H., Song, S. -C., & Oh, H. -U. (2022). Design and Performance of X-Band SAR Payload for 80 kg Class Flat-Panel-Type Microsatellite Based on Active Phased Array Antenna. Aerospace, 9(4), 213. https://doi.org/10.3390/aerospace9040213