
Performance Comparison of Control Strategies for a Variable-Thrust Solid-Propellant Rocket Motor

Abstract
:1. Introduction
2. Mathematical Modeling
2.1. Solid-Propellant Rocket Motor Specification
2.2. Pressure Dynamic Modeling
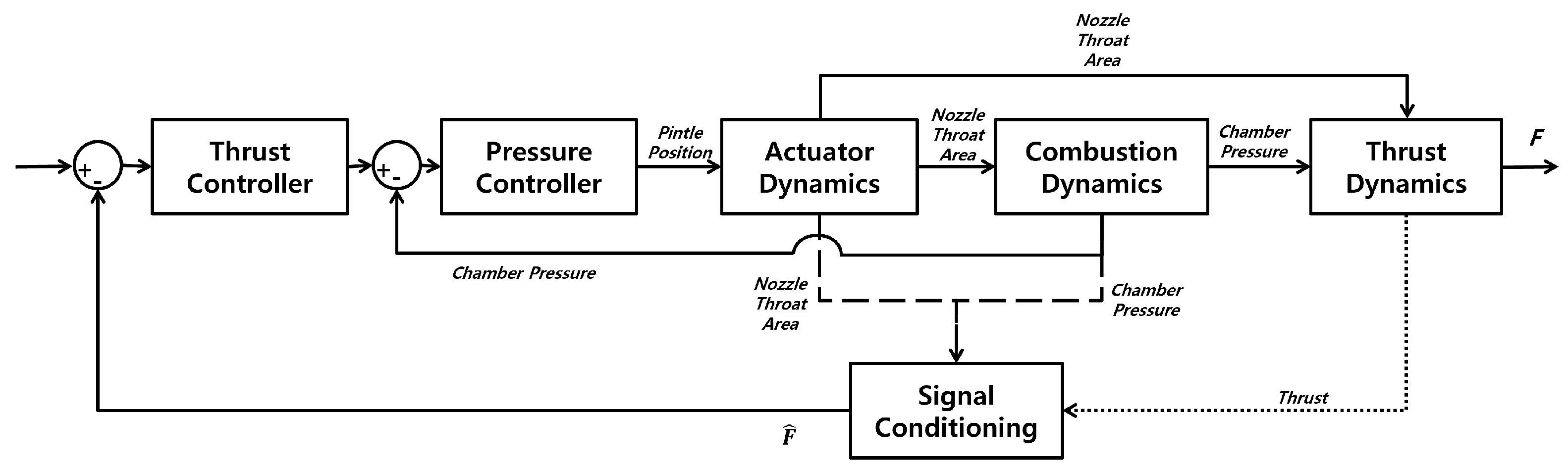
2.3. Thrust Dynamic Modeling
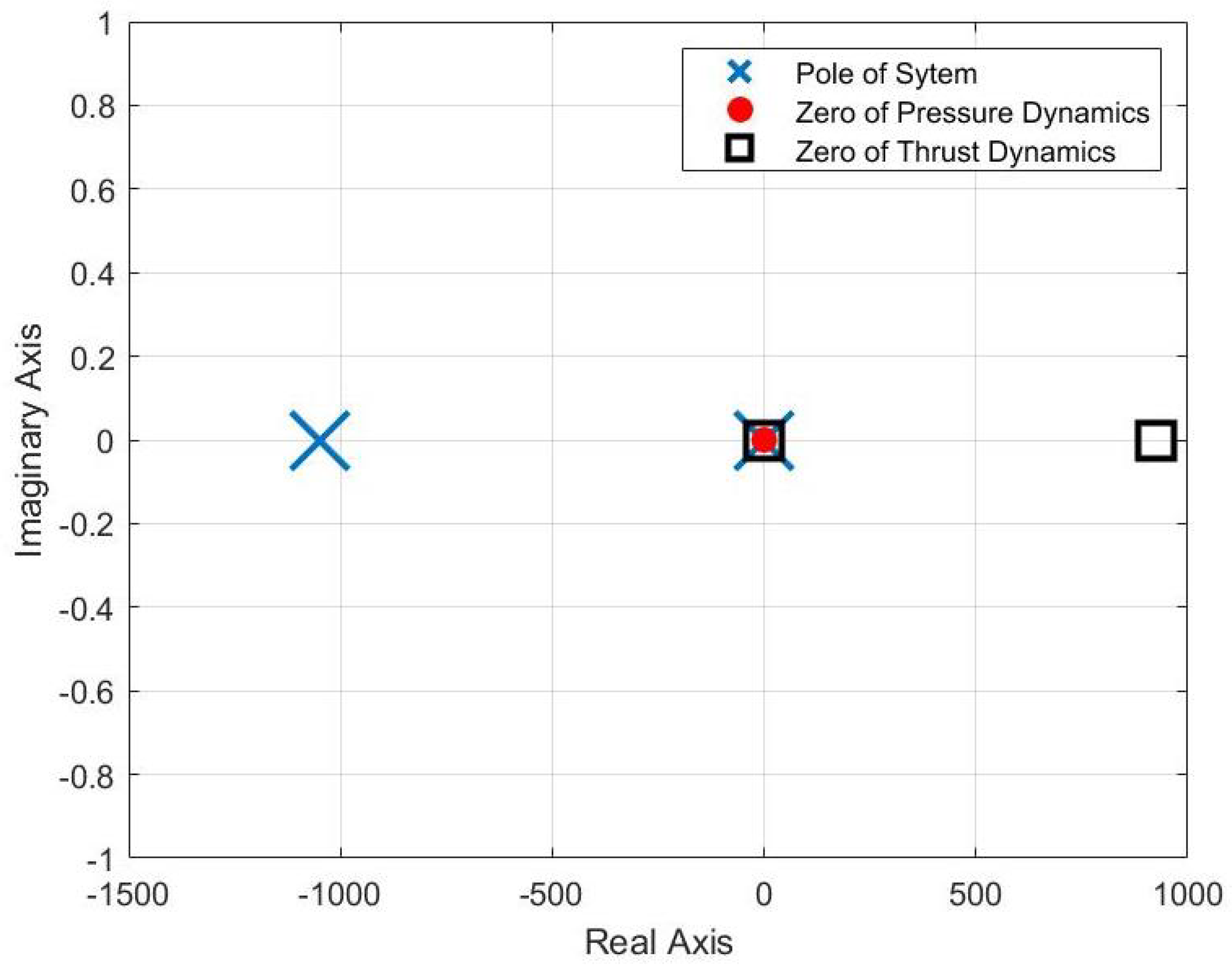
2.4. Stability Analysis
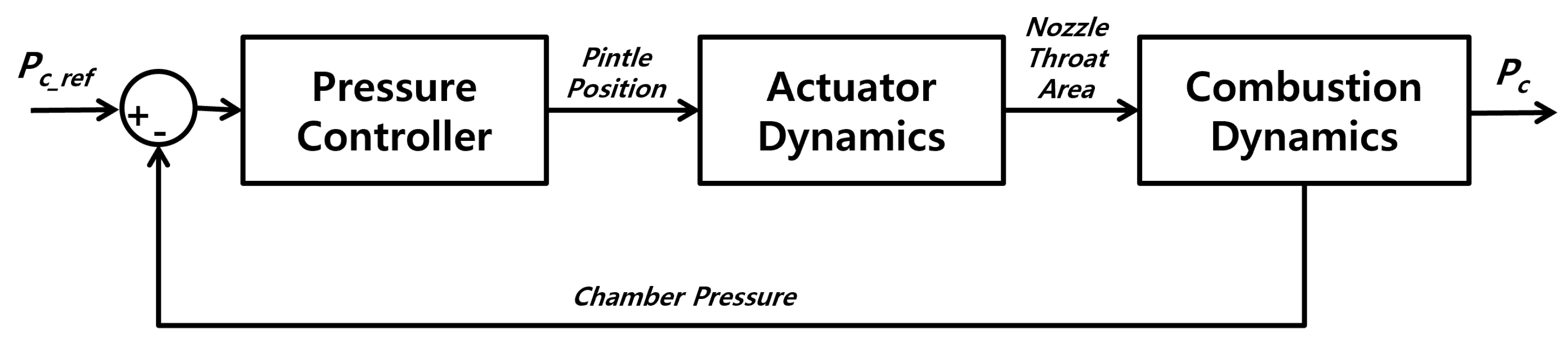
3. Pressure Control
3.1. Classical PID Control
3.2. Feedback Linearization Control
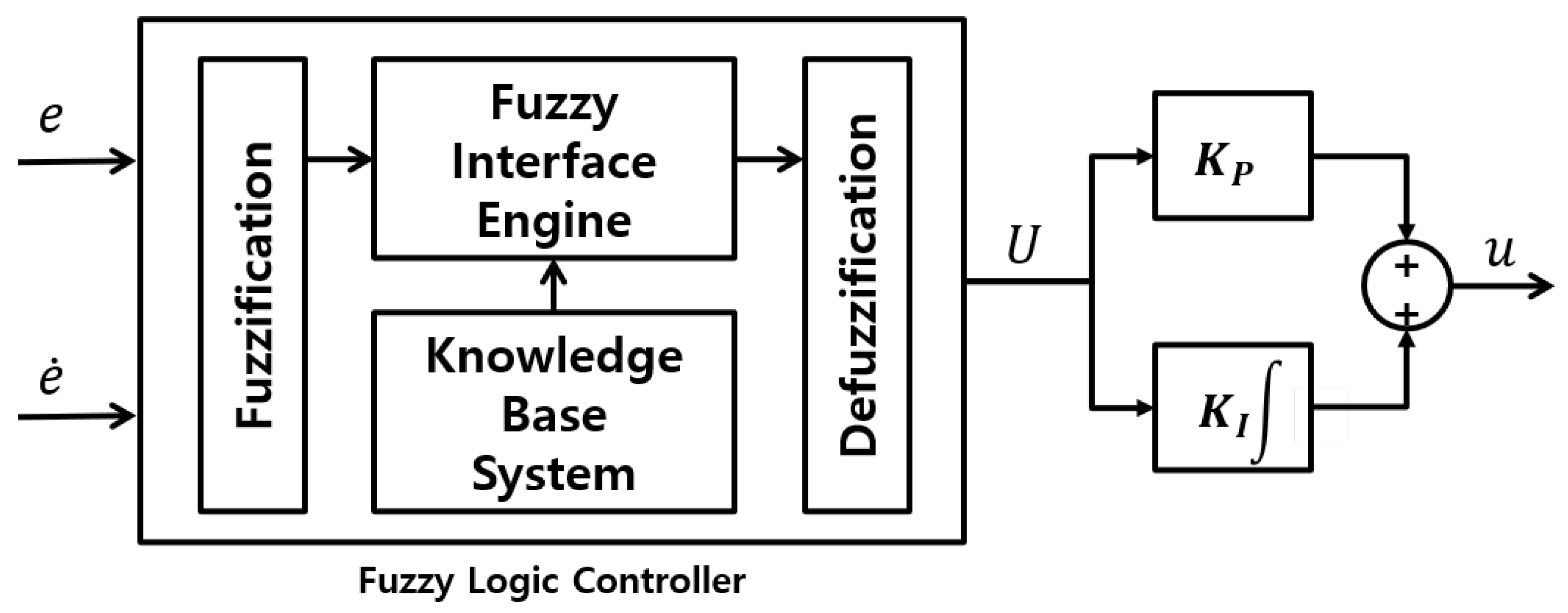
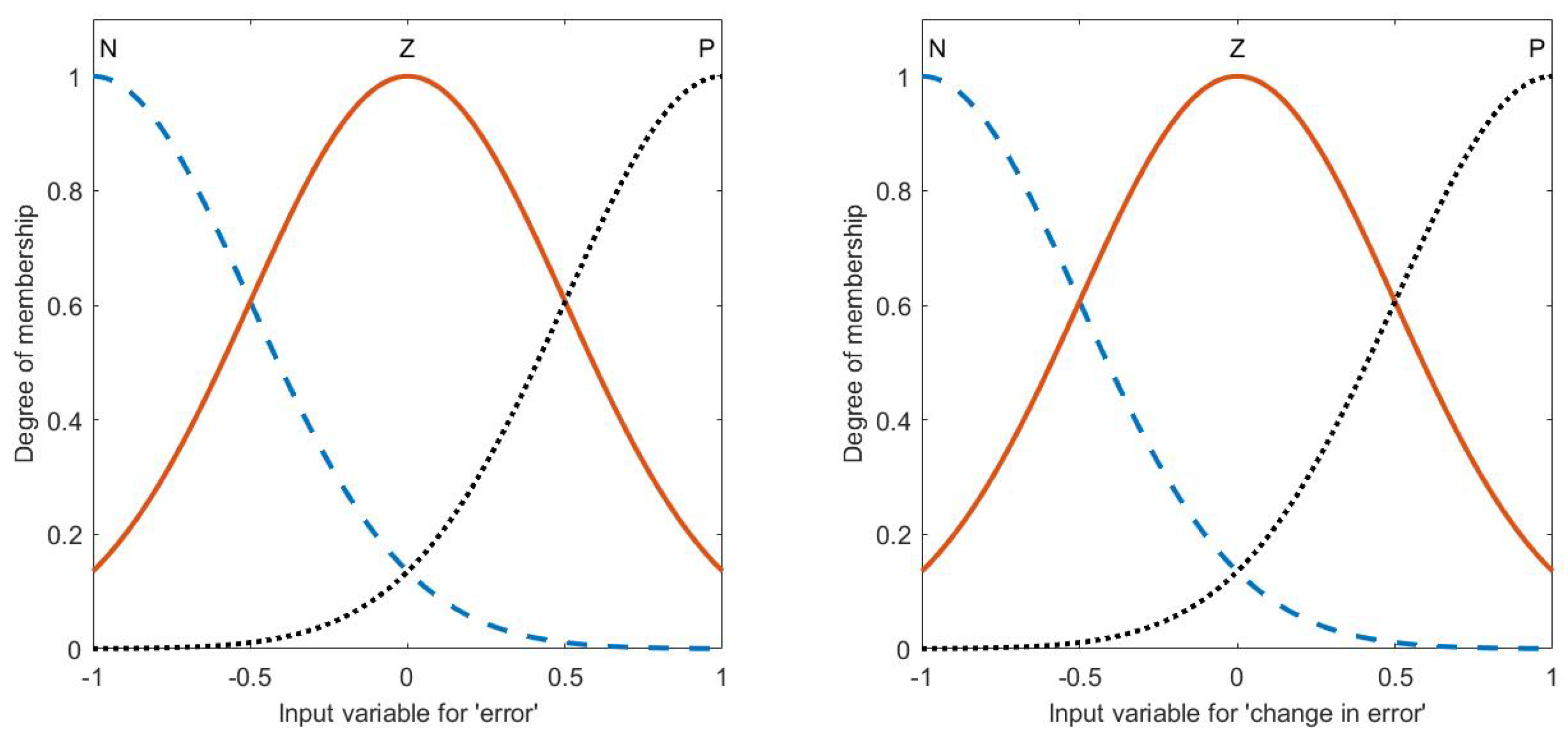
3.3. Fuzzy PID Control
4. Thrust Control
4.1. Classical PID Control
4.2. Fuzzy PID Control
5. Numerical Simulation and Analysis
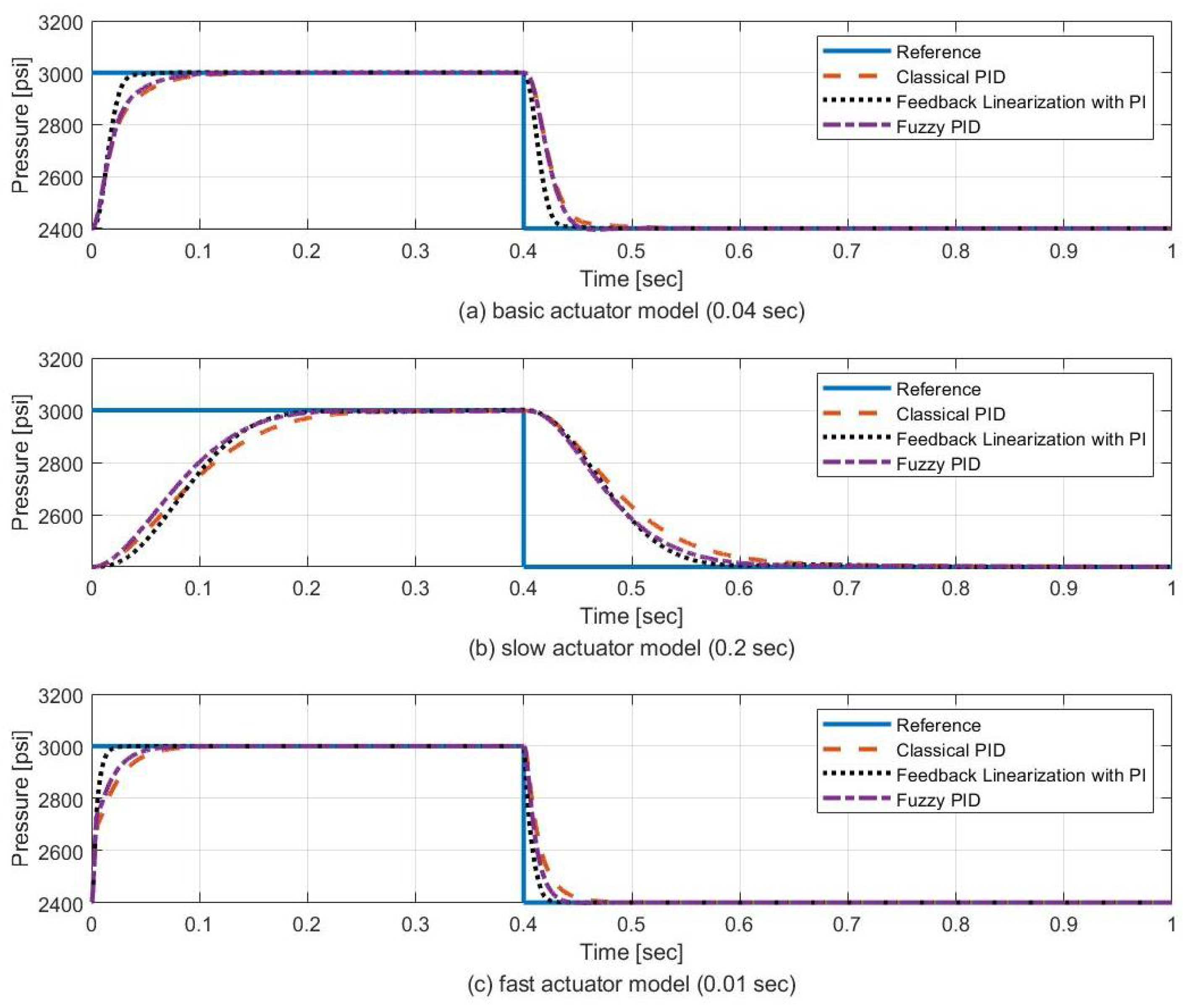
5.1. Pressure Control Results and Analysis
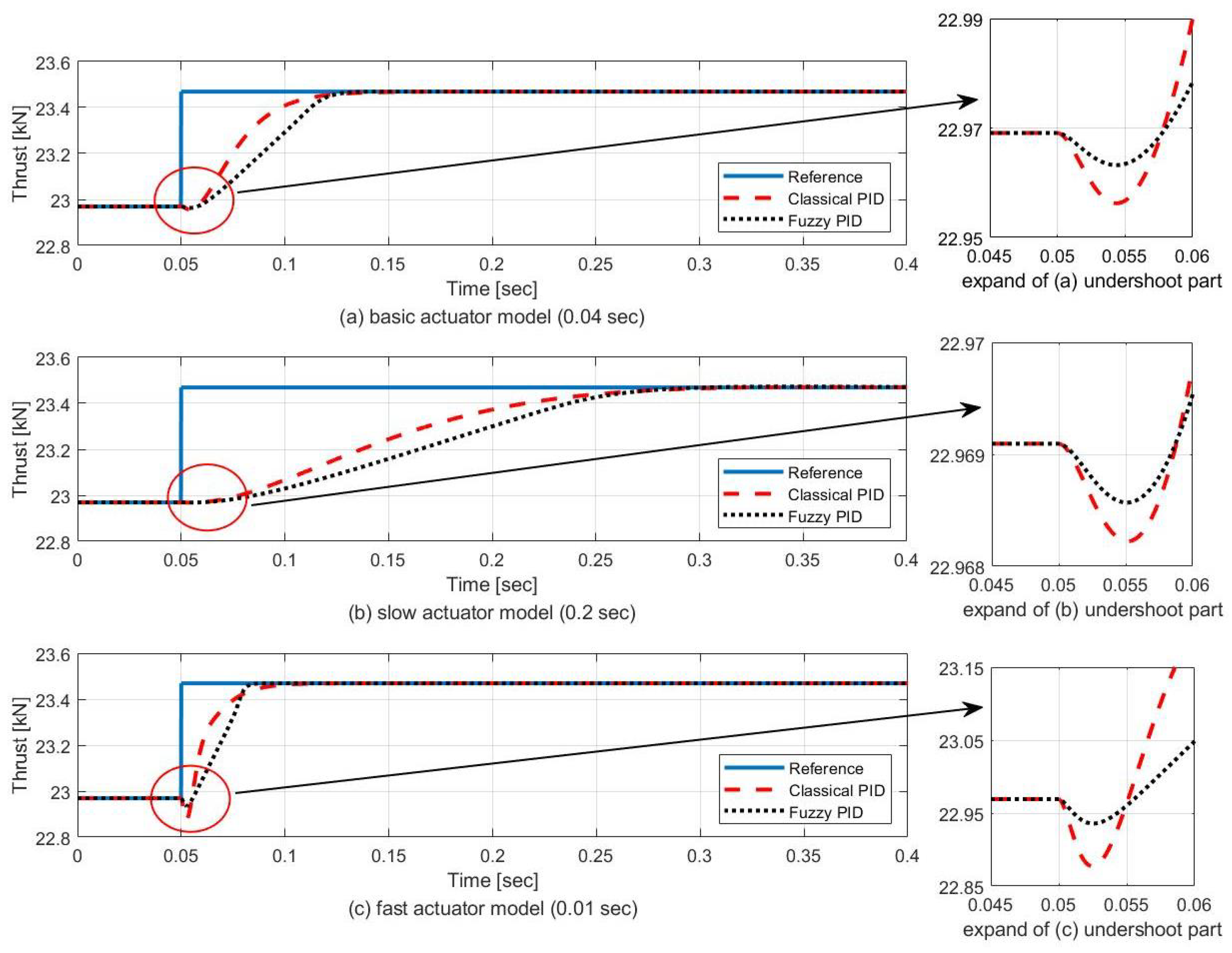
5.2. Thrust Control and Analysis
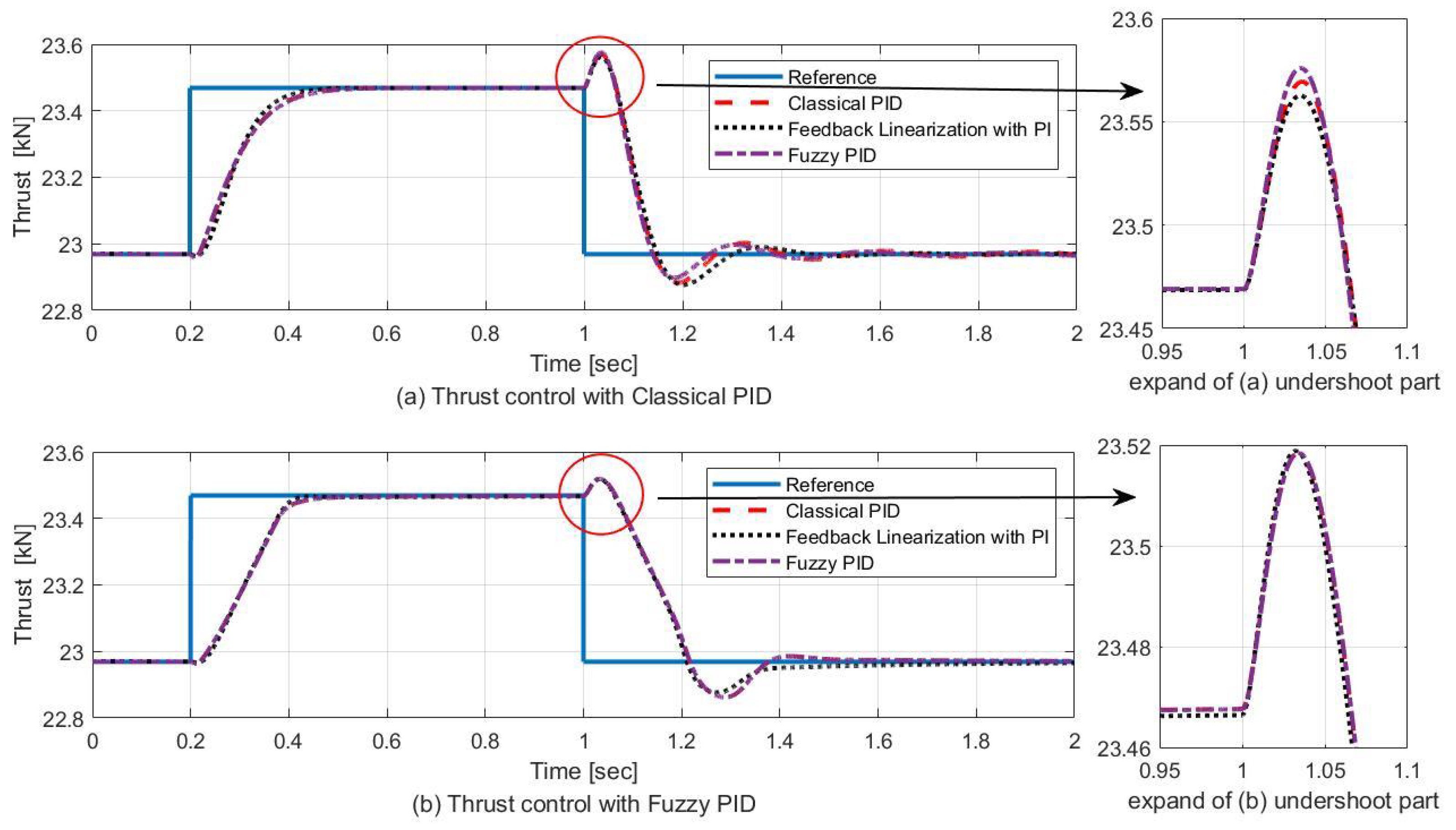
5.3. Combining Pressure Control and Thrust Control
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Burning surface area | |
| Nozzle exit area | |
| Nozzle throat area | |
| Characteristic velocity | |
| F | Thrust |
| M | Accumulated mass in the free volume |
| Nozzle exit Mach number | |
| Ambient pressure | |
| Combustion chamber pressure | |
| Nozzle exit pressure | |
| R | Combustion gas constant |
| T | Combustion chamber temperature |
| Free volume of chamber | |
| Nozzle exit velocity | |
| a | Burn rate coefficient |
| c | Speed of sound of combustion gas |
| k | Specific heat ratio |
| Discharge mass flow rate from chamber | |
| Generated mass flow rate from solid propellant | |
| n | Burn rate exponent |
| Combustion gas density | |
| Solid propellant density |
References
- Sutton, G.P.; Biblarz, O. Rocket Propulsion Elements, 9th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Mahjub, A.; Mazlan, N.M.; Abdullah, M.Z.; Azam, Q. Design Optimization of Solid Rocket Propulsion: A Survey of Recent Advancements. J. Spacecr Rockets 2020, 57, 3–11. [Google Scholar] [CrossRef]
- Hernandez, R.N.; Singh, H.; Messimer, S.L.; Patterson, A.E. Design and performance of modular 3-D printed solid-propellant rocket airframes. Aerospace 2017, 4, 17. [Google Scholar] [CrossRef] [Green Version]
- Tummala, A.R.; Dutta, A. An overview of cube-satellite propulsion technologies and trends. Aerospace 2017, 4, 58. [Google Scholar] [CrossRef] [Green Version]
- Da Cás, P.L.; Veras, C.A.; Shynkarenko, O.; Leonardi, R. A Brazilian space launch system for the small satellite market. Aerospace 2019, 6, 123. [Google Scholar] [CrossRef] [Green Version]
- McDonald, A. Solid rockets-An affordable solution to future space propulsion needs. In Proceedings of the 20th Joint Propulsion Conference, Cincinnati, OH, USA, 11–13 June 1984. [Google Scholar]
- Caubet, P.; Berdoyes, M. Innovative ArianeGroup Controllable Solid Propulsion Technologies. In Proceedings of the AIAA Propulsion and Energy 2019 Forum, Indianapolis, IN, USA, 19–22 August 2019. [Google Scholar]
- Alan, A.; Yildiz, Y.; Poyraz, U. Adaptive pressure control experiment: Controller design and implementation. In Proceedings of the 2017 IEEE Conference on Control Technology and Applications (CCTA), Kohala Coast, HI, USA, 27–30 August 2017. [Google Scholar]
- Yonggang, G.; Yang, L.; Zexin, C.; Xiaocong, L.; Chunbo, H.; Xiaojing, Y. Influence of lobe geometry on mixing and heat release characteristics of solid fuel rocket scramjet combustor. Acta Astronaut. 2019, 164, 212–229. [Google Scholar] [CrossRef]
- Yang, L.; Yonggang, G.; Lei, S.; Zexin, C.; Xiaojing, Y. Preliminary experimental study on solid rocket fuel gas scramjet. Acta Astronaut. 2018, 153, 146–153. [Google Scholar] [CrossRef]
- Chang, J.; Li, B.; Bao, W.; Niu, W.; Yu, D. Thrust control system design of ducted rockets. Acta Astronaut. 2011, 69, 86–95. [Google Scholar] [CrossRef]
- Ponti, F.; Mini, S.; Fadigati, L.; Ravaglioli, V.; Annovazzi, A.; Garreffa, V. Effects of inclusions on the performance of a solid rocket motor. Acta Astronaut. 2021, 189, 283–297. [Google Scholar] [CrossRef]
- Alan, A.; Yildiz, Y.; Poyraz, U. High-performance adaptive pressure control in the presence of time delays: Pressure control for use in variable-thrust rocket development. IEEE Contr. Syst. Mag. 2018, 38, 26–62. [Google Scholar] [CrossRef] [Green Version]
- Bergmans, J.; Di Salvo, R. Solid Rocket Motor Control: Theoretical Motivation and Experimental Demonstration. In Proceedings of the 39th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Huntsville, AL, USA, 20–23 July 2003. [Google Scholar]
- Lee, H.S.; Lee, D.Y.; Park, J.S.; Kim, J.K. A Study on Pressure Control for Variable Thrust Solid Propulsion System Using Cold Gas Test Equipment. J. Korean Soc. Aeronaut. 2009, 37, 76–81. [Google Scholar]
- Hong, S. Gain Scheduling Controller Design and Performance Evaluation for Thrust Control of Variable Thrust Solid Rocket Motor. J. Korean Soc. Aeronaut. 2016, 20, 28–36. [Google Scholar]
- Napior, J.; Garmy, V. Controllable solid propulsion for launch vehicle and spacecraft application. In Proceedings of the 57th International Astronautical Congress, Valencia, Spain, 2–6 October 2006. [Google Scholar]
- Lim, Y.; Lee, W.; Bang, H.; Lee, H. Thrust distribution for attitude control in a variable thrust propulsion system with four ACS nozzles. Adv. Space Res. 2017, 59, 1848–1860. [Google Scholar] [CrossRef]
- Lee, H.; Bang, H. Efficient Thrust Management Algorithm for Variable Thrust Solid Propulsion System with Multi-Nozzles. J. Spacecr Rockets. 2020, 57, 328–345. [Google Scholar] [CrossRef]
- Ji, M.; Chang, H. Modeling and dynamic characteristics analysis on solid attitude control motor using pintle thrusters. Aerosp. Sci. Technol. 2020, 106, 106130. [Google Scholar]
- Saravanan, V.; Ko, J.; Lee, S.; Murugan, N.; Kumar, V.S. Conceptual aerodynamic design of pintle nozzle for variable-thrust propulsion. Int. J. Aeronaut. Space Sci. 2020, 21, 1–14. [Google Scholar] [CrossRef]
- Song, A.; Wangm, N.; Li, J.; Ma, B.; Chen, X. Transient flow characteristics and performance of a solid rocket motor with a pintle valve. Chin. J. Aeronaut. 2020, 33, 3189–3205. [Google Scholar] [CrossRef]
- Sapkota, J.; Xu, Y.H.; Sun, H.J. Numerical Study on Response Characteristics of Solid Rocket Pintle Motor. J. Aerosp. Technol. Manag. 2019, 11. [Google Scholar] [CrossRef]
- Yan, D.; Wei, Z.; Xie, K.; Wang, N. Simulation of thrust control by fluidic injection and pintle in a solid rocket motor. Aerosp. Sci. Technol. 2020, 99, 105711. [Google Scholar] [CrossRef]
- Ko, H.; Lee, J. Cold tests and the dynamic characteristics of the pintle type solid rocket motor. In Proceedings of the 49th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, San Jose, CA, USA, 14–17 July 2013. [Google Scholar]
- Naumann, K.W.; Hopfe, N. Hot Gas Nozzle-Valve Assembly and Control Method for Continuously Operating Divert-and Attitude Control Systems. In Proceedings of the AIAA Propulsion and Energy 2019 Forum, Indianapolis, IN, USA, 19–22 August 2019. [Google Scholar]
- Martins, L.; Cardeira, C.; Oliveira, P. Feedback linearization with zero dynamics stabilization for quadrotor control. J. Intell. Robot. Syst. 2021, 101, 1–17. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 1st ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Piltan, F.; Yarmahmoudi, M.; Mirzaie, M.; Emamzadeh, S.; Hivand, Z. Design novel fuzzy robust feedback linearization control with application to robot manipulator. Int. J. Intell. Syst. Appl. 2013, 5, 1. [Google Scholar] [CrossRef] [Green Version]
- Li, E.H.; Li, Y.Z.; Li, J.X.; Lou, Y.Y. An investigation on fuzzy incremental control strategy of water membrane evaporator cooling loop for mars spacesuit. Acta Astronaut. 2021, 182, 66–76. [Google Scholar] [CrossRef]
- Chak, Y.C.; Varatharajoo, R.; Razoumny, Y. Disturbance observer-based fuzzy control for flexible spacecraft combined attitude & sun tracking system. Acta Astronaut. 2017, 133, 302–310. [Google Scholar]
- Hu, Y.; Yang, Y.; Li, S.; Zhou, Y. Fuzzy controller design of micro-unmanned helicopter relying on improved genetic optimization algorithm. Aerosp. Sci. Technol. 2020, 98, 105685. [Google Scholar] [CrossRef]
- Lee, J. A Study on the Static and Dynamic Characteristics of Pintle-Perturbed Conical Nozzle Flows. Ph.D. Thesis, Department of Mechanical Engineering, Yonsei University, Seoul, Korea, 2012. [Google Scholar]
- Mattingly, J.D. Elements of Gas Turbine Propulsion, 1st ed.; McGraw-Hill: New York, NY, USA, 1996. [Google Scholar]
- Lau, K.; Middleton, R.H.; Braslavsky, J.H. Undershoot and settling time tradeoffs for nonminimum phase systems. IEEE Trans. Automat. Contr. 2003, 48, 1389–1393. [Google Scholar] [CrossRef]
- Cha, J.; Ko, S.; Suh, S. Control of Pressure and Thrust for a Variable Thrust Solid Propulsion System Using Linearization Considering Characteristic Changes in the Combustor. In Proceedings of the 2013 KSPE Spring Conference, Busan, Korea, 29–31 May 2013. [Google Scholar]
- Kim, Y.; Cha, J.; Ko, S.; Kim, D. Control of pressure and thrust for a variable thrust solid propulsion system using linearization. J. KSPE 2011, 15, 18–25. [Google Scholar]
- Yesil, E.; Guzelkaya, M.; Eksin, I. Fuzzy PID controllers: An overview. In Proceedings of the 3rd Triennial ETAI International Conference on Applied Automatic Systems, Skopje, North Macedonia, 18–20 September 2003. [Google Scholar]
- Henriksson, M.; Grönstedt, T.; Breitholtz, C. Model-based on-board turbofan thrust estimation. Control Eng. Pract. 2011, 19, 602–610. [Google Scholar] [CrossRef]
- Ring, D.; Henriksson, M. Thrust control for a turbofan engine using estimation. In Proceedings of the Turbo Expo: Power for Land, Sea, and Air, Barcelona, Spain, 8–11 May 2006. [Google Scholar]
- Zhang, Y.; Zhao, Z.; Lu, T.; Yuan, L.; Xu, W.; Zhu, J. A comparative study of Luenberger observer, sliding mode observer and extended Kalman filter for sensorless vector control of induction motor drives. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009. [Google Scholar]
- Cha, J. A Study on Thrust Control System Design for Multi-Nozzle Solid Propulsion System. Master’s Thesis, Department of Aerospace and Mechanical Engineering, Korea Aerospace University, Goyang, Korea, 2014. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuator | 1st Settling Time | 2nd Settling Time | ||||
|---|---|---|---|---|---|---|
| Model | Classical PID | Feedback Linearization | Fuzzy PID | Classical PID | Feedback Linearization | Fuzzy PID |
| 0.01 s | 0.0713 | 0.0183 | 0.0552 | 0.0557 | 0.0222 | 0.0339 |
| 0.04 s | 0.0973 | 0.0362 | 0.0837 | 0.0793 | 0.0339 | 0.0488 |
| 0.2 s | 0.2335 | 0.1866 | 0.1943 | 0.2634 | 0.1751 | 0.2084 |
| Actuator | Undershoot | Settling Time | ||
|---|---|---|---|---|
| Model | Classical PID | Fuzzy PID | Classical PID | Fuzzy PID |
| 0.01 s | 18.43 % | 6.69 % | 0.0954 | 0.0822 |
| 0.04 s | 2.57 % | 1.18 % | 0.1267 | 0.1254 |
| 0.2 s | 0.17 % | 0.11 % | 0.2825 | 0.2797 |
| Thrust Control | Pressure Control | 1st Transient | 2nd Transient | |||
|---|---|---|---|---|---|---|
| Undershoot | Settling Time | Undershoot | Overshoot | Settling Time | ||
| Classical PID | Classical PID | 1.98% | 0.2647 | 20.05% | 17.17% | 0.505 |
| Feedback Linearization | 1.13% | 0.2319 | 18.71% | 18.42% | 0.417 | |
| Fuzzy PID | 2.16% | 0.2759 | 21.36% | 14.27 % | 0.465 | |
| Fuzzy PID | Classical PID | 1.10% | 0.2561 | 9.85 % | 21.37% | 0.474 |
| Feedback Linearization | 0.63% | 0.2130 | 9.95% | 18.50% | 0.625 | |
| Fuzzy PID | 1.11% | 0.2561 | 9.88% | 21.39% | 0.476 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cha, J.; de Oliveira, É.J. Performance Comparison of Control Strategies for a Variable-Thrust Solid-Propellant Rocket Motor. Aerospace 2022, 9, 325. https://doi.org/10.3390/aerospace9060325
Cha J, de Oliveira ÉJ. Performance Comparison of Control Strategies for a Variable-Thrust Solid-Propellant Rocket Motor. Aerospace. 2022; 9(6):325. https://doi.org/10.3390/aerospace9060325
Chicago/Turabian StyleCha, Jihyoung, and Élcio Jeronimo de Oliveira. 2022. "Performance Comparison of Control Strategies for a Variable-Thrust Solid-Propellant Rocket Motor" Aerospace 9, no. 6: 325. https://doi.org/10.3390/aerospace9060325
APA StyleCha, J., & de Oliveira, É. J. (2022). Performance Comparison of Control Strategies for a Variable-Thrust Solid-Propellant Rocket Motor. Aerospace, 9(6), 325. https://doi.org/10.3390/aerospace9060325