1. Introduction
The search for signs of life in our solar system has been made possible by advanced robotic exploration. The discovery of subsurface oceans on Europa, salty plumes on Enceladus, methane lakes on Titan, and more recently, the potential presence of phosphine in the Venusian clouds [
1,
2], has increased the expectation that these planets and moons might harbor extant life.
The cloud layers of Venus, which extend from 48 km to 70 km, present temperature and pressure conditions similar to those on the surface of the Earth—contrasting markedly with the surface environment of 450 °C and 90 bar pressure. For decades, the clouds of Venus have been thought to be potentially habitable and even possibly harboring life [
3]. The topic of life on Venus has regained popularity in light of both longstanding and recent discoveries, which include the unknown composition of Mode 3 cloud particles [
4]; the “mysterious UV absorber” in the upper clouds [
5]; the presence of tens of ppm of O
2 [
6,
7]; the potential presence of PH
3 [
1]; the SO
2 and H
2O vertical abundance profiles [
8]; and the possible presence of NH
3 [
9]. These anomalies, some of which have observably lingered for decades, might be tied to habitability and life’s activities or be indicative of unknown chemistry which, in its own right, is worth exploring.
These findings warrant a dedicated exploration of the Venus cloud decks to assess habitability, look for signs of life or even life itself, and lay the groundwork for an eventual atmospheric sample return mission.
In this paper, we present in detail one version of the architecture of the Venus Life Finder (VLF) “medium” mission, which would build upon a targeted probe mission in development (further details in [
10]) that seeks evidence of a carbon cycle in the Venus atmosphere and will spend only a few minutes within the temperate cloud zone. The VLF medium mission is a balloon mission that enables more sophisticated science instruments to operate over a longer duration than an atmospheric probe, providing spatial and temporal variability in sampling.
The only precedent of a balloon mission to Venus, or any planetary body, is the VeGa mission sent by the Soviet Union in 1985 [
11]. The VeGa mission consisted of two identical probes to Venus, each carrying a balloon platform and a lander. The balloons successfully transmitted the science data back to Earth. The zero-pressure balloon floated at 54 km altitude, transmitting data for about 48 h, and traversed about 11,000 km around the planet, close to the equator. The inflated balloon was about 3 m in diameter, with a total balloon and gondola mass of 23 kg. The gondola was a 6 kg system, with atmospheric structure instruments including temperature, pressure, and wind velocity sensors. The gondola also had a backscattering nephelometer [
12]. The overall success of the mission set a precedent for using balloon technology on Venus (and elsewhere in the solar system) and provided a tangible baseline for future missions.
Several balloon mission concepts have been designed since the VeGa mission to explore the clouds of Venus. Some of these include the Venus Climate Mission [
13], European Venus Explorer [
14], Balloon Experiment at Venus [
15], Buoyant Venus Station [
16], and the 2020 Venus Flagship Mission [
17]. We summarize them briefly for context as follows. The Buoyant Venus Station is one of the early balloon concepts for Venus exploration using a fixed-float altitude super-pressure balloon with a mission life ranging from one week to several months. The authors suggest multiple possible types of missions including flyby, orbiter, and swing-by. The Venus Climate Mission, a planetary decadal study by NASA, deploys a balloon with a float altitude of 55.5 km. The Venus Climate Mission balloon carries a mini probe and two drop sondes that are deployed at different times over a nominal operational time of 21 days [
13]. The balloon returns data via an orbiter in Venus orbit that acts as a communication relay. The European Venus Explorer, a mission proposal to ESA, consists of a balloon with a float altitude of 55 km and an operation period of 10 days [
14]. The European Venus Explorer balloon returns data via a combination of a direct-to-Earth link and a link with the flyby carrier spacecraft. NASA JPL’s Balloon Experiment at Venus concept consists of a variable altitude balloon that uses a reversible fluid altitude control technology [
15]. The balloon cycles between 40 and 60 km every six hours. The balloon uses a direct-to-Earth strategy to return science data. The data return strategy in each of the above concepts correlates to the size of the science payload and science data.
In this paper, we present the mission architecture for one version of the VLF medium mission. First, we introduce the science requirements, which can be achieved with a balloon platform carrying a gondola with science instruments, with a mission life of two weeks and a possible extension to 30 days. We present two balloon platform concepts: (1) Constant Float Altitude (CFA) and (2) Variable Float Altitude (VFA). The CFA balloon has a fixed-float altitude of 52 km whereas the VFA balloon cycles between the altitudes of 48 km and 60 km. In this paper, we describe the VFA concept in detail and provide a comparison with the CFA in
Section 8.
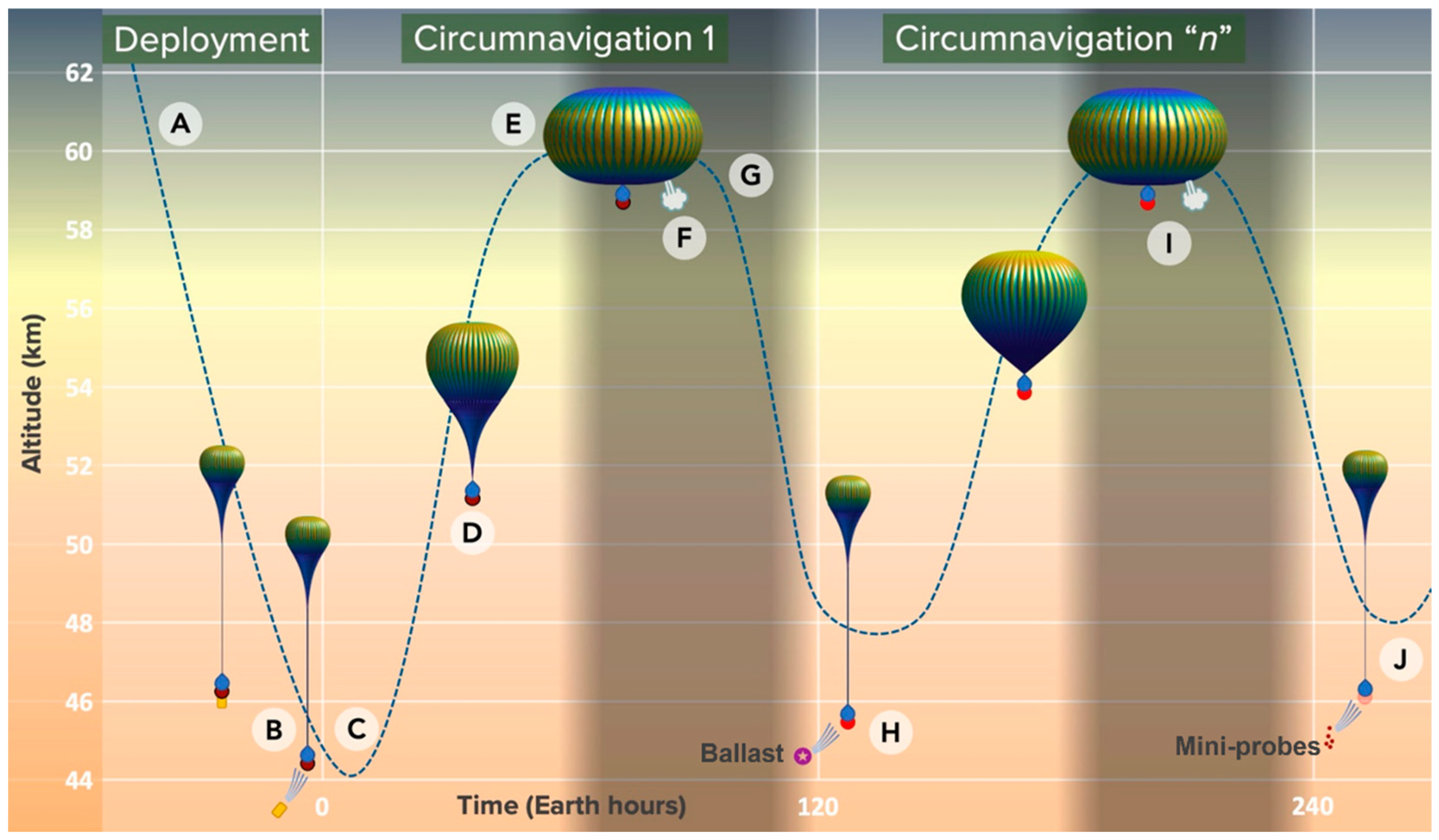
In this paper, we focus on the VFA balloon concept. The VFA balloon is a simple super-pressure balloon that, in the context of the herein considered ConOps, varies altitude between 48 and 60 km. To change altitude, the balloon uses an innovative combination of (a) conventional ballast drop and controlled gas venting, and (b) strategic use of heating and cooling associated with the Venus diurnal cycles. The VFA concept all but eliminates the complexity of a Variable Altitude Balloon (VAB) that incorporates active mechanical or pump-based density control systems while still facilitating a reasonable number of altitude cycles to accomplish the intended science objectives. The balloon returns data using a combination of an orbiter communication link and direct-to-Earth transmission.
2. Science Goals and Requirements
The science focus of the mission is to investigate the habitability of cloud particles. The science goals are:
Measure habitability indicators of the cloud deck:
- -
Determine the amount of water vapor in the cloud layers
- -
Determine the acidity of the cloud droplets
- -
Detect and identify metals in the cloud particles
- -
Measure temperature, pressure, and windspeed
Search for evidence of life in the Venusian clouds:
- -
Detect reduced and anomalous molecules as a sign of disequilibrium chemistry and as biosignature gases
- -
Detect presence of organic material within cloud-layer particles
- -
Identify organic material within cloud-layer particles
Characterize cloud particles in preparation for a sample return mission:
- -
Determine if cloud particles are liquid or solid or both
- -
Determine the level of homogeneity of the cloud particles
The altitude range of 48 to 60 km is chosen for science operations as it spans all three cloud layer regions: the lower, middle, and part of the upper cloud layer. The lower cloud layers, which are situated in the 48 to 52 km altitude range are known to contain the majority of the so-called “Mode 3” particles of unknown composition [
4]. The data from the Pioneer Venus probe suggest that some cloud particles are not spherical and as such cannot be composed solely of pure liquid sulfuric acid [
4] leading to the possibility of unknown chemistry, including life [
9,
18]. The middle cloud layer, dominated by spherical, liquid droplets of sulfuric acid stretches from 51 to 56 km. The upper cloud layer, above 56 km, contains the so-called “unknown UV absorber” [
5]. The UV absorber has properties that are suggested to be consistent with biological activity by some researchers [
19], while others have suggested potential abiotic matches, such as S
2O
2 [
20].
Science Instruments
Our philosophy for the VLF mission is to send a suite of small, low-complexity science instruments to operate just long enough to assess the cloud-layer habitability, search for biosignatures, and to prepare for sample return. The science instrument suite is listed in
Table 1, with a mass, power, and volume summary. These instruments are housed inside the balloon gondola. The power listed corresponds to an operation cycle of the respective instruments. Over the course of the mission, the average power requirement of an instrument will depend on the total operation time. At a given time, only one instrument is operated. On average, we assume that each instrument operates for roughly 20% of the mission duration to provide a baseline power requirement.
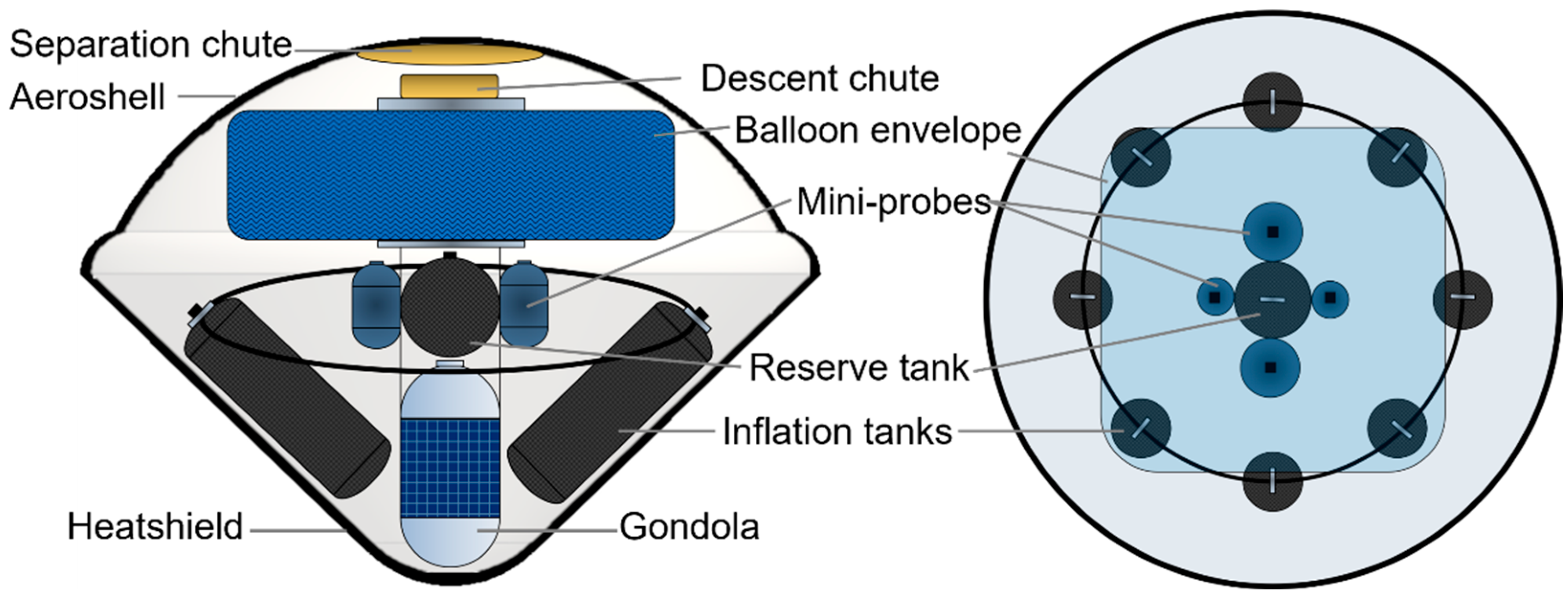
There are also four mini probes, each containing a different instrument as well as a Weather Instruments Suite (WIS). The four instruments include an Auto-fluorescing Nephelometer (AFN), MEMS Aerosol Elemental Analyzer (MEMS-A), Tartu Observatory pH Sensor (TOPS), and another pH sensor concept called the Molybdenum Oxide Sensor Array (MoOSA). The total instrument mass for the mini probes is about 1.6 kg. For a detailed discussion of the instruments and science behind the proposed habitability mission architecture, see the VLF mission study report [
10].
7. Communication Architecture
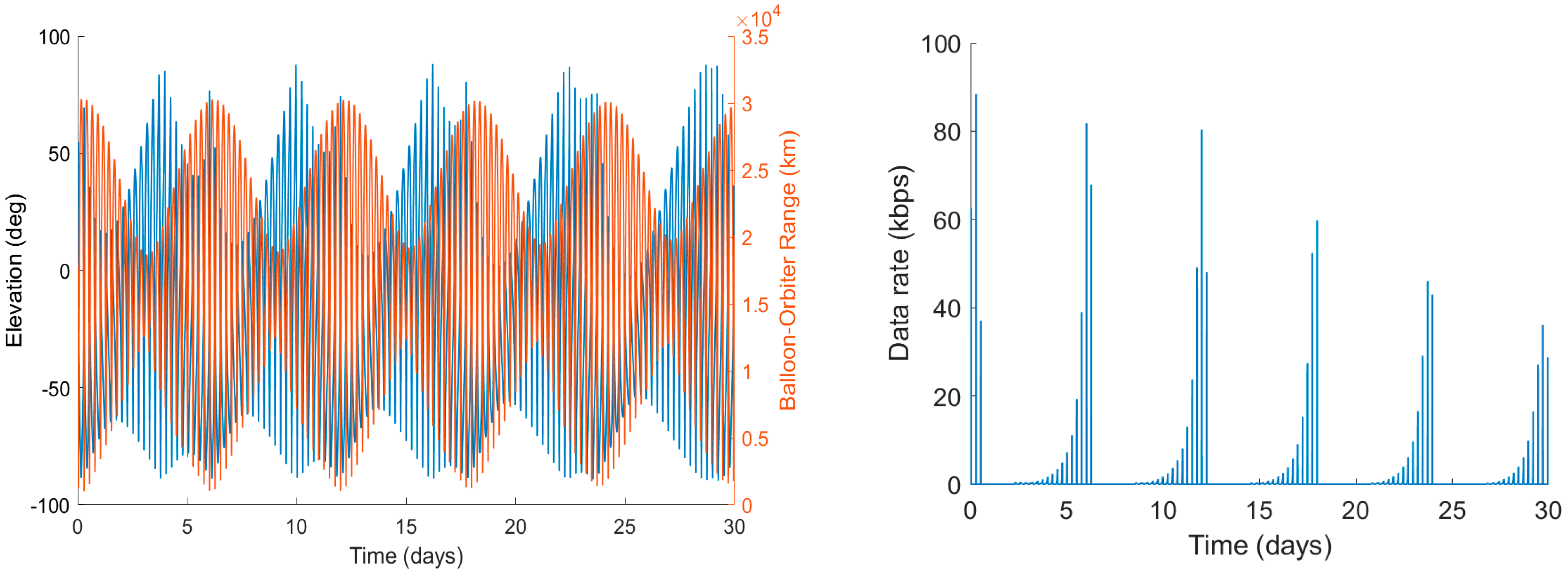
We choose a combination of direct-to-Earth and orbiter relay to return the science data. The balloon transmits at a rate of 100 bps direct-to-Earth. The orbiter relay data rate is shown in
Figure 11. The total data volume transmitted over a period of 14 days is about 250 MB via the orbiter and about 25 MB via direct-to-Earth transmission. The data volume does not account for improvements from compression. With lossless compression algorithms and data packing, a compression ratio of up to 3 can be achieved. A higher compression ratio can be achieved if some loss in data is acceptable. With the development of more efficient transmission bands such as the Ka-band, the data rate can be improved.
The number of contacts and data rate to the relay depend on the orbit. Thus, the orbit is an important variable in the trade study. The orbiter is in a 6-h orbit, with low retrograde inclination and periapsis in the hemisphere of the balloon’s deployment location. A retrograde orbit is chosen because the rotation of the atmosphere results in the balloon circumnavigating the planet in a retrograde direction. A low inclination allows for the orbiter to be within line of sight with the balloon for the maximum duration of the orbit. The selected orbit provides roughly 16 passes over the duration of one circumnavigation of the balloon, each of about 8 to 10 min.
Figure 11 shows the elevation of the orbiter with respect to the balloon along with the range and data rate for the passes. The orbit insertion can be controlled such that the passes during the first circumnavigation are timed as desired.
We also analyzed a synchronous orbit for the relay which has a period equal to the circumnavigation period of the balloon. A synchronous orbit increases the contact window with the balloon. The challenge is that the balloon’s trajectory is not well-modeled and depends on the atmospheric circulation, which is not yet highly characterized. A small deviation in the balloon’s trajectory can lead to the orbiter and balloon losing contact.
9. Conclusions
We propose a balloon mission to explore the cloud deck of Venus in search of signs of life and to investigate the habitability of cloud particles. The balloon explores the cloud region from 48 to 60 km—completing the baseline mission after two weeks, with the possibility of extended operations lasting up to one month. Science data is returned via an orbiting relay and direct-to-Earth transmission. The balloon deploys miniature probes at select times during its flight operations to provide spatial and temporal diversity in acquired data.
The science payload is a mix of novel high TRL and low TRL instruments. The unique astrobiology-focused goals of the mission, combined with the challenging operational environment, require the capability advancement of instruments that have not yet been applied to planetary exploration. Such instruments, carried by a variable float-altitude balloon, would enable the characterization of habitability and poorly understood phenomena in the Venus clouds and could possibly result in the discovery of signs of life at Venus—which, if confirmed, would be among the most significant events in human history.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}